Результат интеллектуальной деятельности: Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог
Вид РИД
Изобретение
Изобретение относится к автомобилестроению, в частности, к способам обеспечения безопасности дорожного движения управлением автоматически управляемых БТС в колонне и/или отдельных БТС мониторинга интеллектуальной транспортной инфраструктуры (ИТИ) сети автомобильных дорог.
В процессе разработки и массового применения беспилотных транспортных средств на дорогах требуется обеспечить постоянное надежное и эффективное управление движением беспилотных БТС в колонне и/или отдельных БТС, учитывающее изменяющиеся по объективным причинам параметры, маршруты их движения, пространственное положение каждого из них и окружающих их ТС, наличие возможных препятствий на дороге, параметры дороги, состояние окружающей среды и т.д. Эффективное и надежное управление движением беспилотных БТС с учетом мониторинга исполнения команд и состояния БТС позволит оптимизировать транспортные потоки в целом, маршруты движения БТС, сократить время движения каждого БТС, снизить аварийность, расход топлива и уменьшить загрязнение окружающего воздуха.
Основными проблемами повышения надежности и эффективности работы способов управления движением БТС в составе колонн и/или отдельных БТС, оснащенных системами управления движением (СУД), которые взаимодействуют с системами управления интеллектуальной транспортной инфраструктуры, являются низкая оперативность управления, из-за того что системы имеют высокую сложность, недостаточную надежность и эффективность работы способов управления и высокую стоимость систем управления движением всех БТС, вызванная необходимостью выполнения и дублирования функций, реализуемых каждой СУД БТС, завышенного количества дублируемых во всех СУД БТС процессов анализа и обработки информации окружающей обстановки, дорожных и климатических условий, параметров дорог, выявления рисков дорожно-транспортных происшествий (ДТП) и др., а также низкую оперативность процессов формирования и передачи команд управления на привода управления каждого БТС.
Также важной проблемой повышения надежности и эффективности управления движением беспилотных транспортных средств на дорогах с интеллектуальной транспортной инфраструктурой, является необходимость оперативной оптимизации маршрутов движения и повышение точности позиционирования каждого БТС на дороге и/или колонн БТС, в том числе относительно других участников дорожного движения, а также обеспечение безопасности режимов движения и минимизация числа выполняемых маневров каждым ТС на дороге относительно других участников дорожного движения при быстром изменении дорожных условий.
Движение БТС в колонне и отдельных БТС обеспечивается с помощью сложных программно-аппаратных средств для расчета параметров их движения, снижающих оперативность управления движением. Большая надежность и эффективность управления движением БТС в колонне и отдельных БТС достигается при осуществлении взаимодействия программно-аппаратных средств систем управления движением БТС и системы управления (СУ) дорожной интеллектуальной транспортной инфраструктуры (ИТИ) сети автомобильных дорог, при котором, по меньшей мере, через путевые средства беспроводной связи соответствующего путевого центра управления передают к региональному центру управления и после обработки от регионального центра управления получают информацию о маршруте, и через которые пользователи колонн БТС и/или отдельных БТС задают маршруты их движения с данными о пунктах отправления и прибытия, о промежуточных остановках, и передают перечисленные данные в региональный центр управления интеллектуальной транспортной инфраструктурой (РЦУ ИТИ), где их обрабатывают, рассчитывают окончательные оптимальные маршруты, составляют маршрутные карты и передают их полностью или порционно в путевые центры управления, которые передают команды, разрешающие каждому БТС и/или каждому БТС в составе колонны движение в автоматическом режиме по их маршруту в соответствии с их маршрутными картами и проводят постоянный мониторинг исполнения программ и состояния БТС и окружающей среды.
В качестве одного из современных направлений развития систем управления движением БТС, взаимодействующих с СУ ИТИ, региональные центры управления через путевые центры перед началом движения для каждого БТС и/или каждого БТС в составе колонны устанавливают или определяют имеющийся у них индивидуальный идентификационный код, согласно которому производят идентификацию каждого БТС, регистрацию его маршрута и начального пункта местоположения, а после начала движения выполняют оперативный мониторинг параметров движения и состояния каждого БТС на полосах движения согласно дорожной разметки, скорости движения, ускорений, торможений и их взаимного положения, также контролируют состояние всей дорожной обстановки на всей сети автомобильных дорог, своевременно и оперативно оповещают о нештатных ситуациях заинтересованных в этой информации участников движения и выполняют многие другие функции, способствующие повышению безопасности и качества управления движением БТС на всей сети автомобильных дорог.
Известен способ дистанционного управления посредством сети путевых средств беспроводной поэтапной связи интеллектуальной транспортной инфраструктуры автомобильной дороги движением отдельных беспилотных транспортных средств, при котором перед началом движения для каждого БТС устанавливают их индивидуальный идентификационный код и составляют описание предполагаемого, задаваемого пользователями маршрута движения каждого БТС, включающее начальные пункты отправления и конечные пункты прибытия, с предполагаемыми заданными временами начала движения и контрольными временами нахождения в пути и прибытия, выбранных допустимых интервалов времени нахождения в пути и в выбранных заданных направлениях движения; затем каждый маршрут БТС и/или БТС в составе колонн передают в СУ путевых центров управления ИТИ, последняя получает информацию об изменении маршрутов заданных маршрутах пользователей, производит мониторинг местоположения и взаимного положения каждого БТС и определяет порядок движения отдельных БТС и разрабатывает их маршрутные карты с учетом данных их систем технического зрения, включающих видеокамеры, радары и другие датчики по определению скоростей движения, мест ускорений и торможений впереди находящихся БТС по отношению как к каждому отдельному, так и находящемуся в составе колонны БТС;
при этом результаты расчетов предварительных маршрутных карт направляют в центральный региональный центр управления, после подтверждения возможности движения всех БТС центральный региональный центр управления СУ ИТИ дает подтверждение возможности начала движения по предварительным маршрутным картам, при перегрузке отдельных дорог региональный центр управления СУ ИТИ перенаправляет часть БТС и/или БТС в составе колонн по другим дорогам и составляет для них маршрутные карты с обходными маршрутами;
после получения подтверждения возможности движения и/или маршрутных карт с обходными маршрутами и по результатам мониторинга и обмена информацией между путевыми центрами управления СУ ИТИ устанавливают контакт управления с каждым отдельным БТС и/или БТС в составе колонн, СУ ИТИ производят анализ и обработку данных, по результатам которых передают команды в СУ ИТИ и в системы управления движением БТС по корректировке их маршрутов движения, режимов движения и по установлению дистанций между отдельно движущимися БТС, которые формируются с учетом внешних и внутренних условий, из которых внешними являются время суток, погодные условия, состояние дорожной обстановки на дороге, например, ее ширина, пропускная способность, тип и состояние дорожного покрытия, рельеф и высота местности, наличие дорожных знаков, дорожной разметки, светофоров и условия движения транспортного потока, включающие, по меньшей мере, наличие препятствий, интенсивность транспортного потока, его состав, позиционирование БТС, а внутренними могут быть такие как тип и характеристики БТС по весу, габаритам, маршруты движения, техническое состояние транспортного средства (возраст, пробег, состояние трансмиссии тормозной системы, рулевого управления, температура двигателя каждого отдельного и в составе колонны БТС, показания одометра), возраст водителя, время, в течение которого водитель находится за рулем транспортного средства и оставшееся время для водителя до конца движения каждых БТС по маршруту, а также информация о пользователях, перевозимых грузах и х назначении, времени погрузки, нахождении грузов в каждом отдельном БТС во время их движения по маршруту (см. патент КНР № CN 105702073 A, Dynamic turning navigation method based road network checkpoints and travel time indexes, заявители XU YAGUO; XU GUANGNING  опубл. 22.06.2016).
опубл. 22.06.2016).
Принципиальными недостатками данного способа управления движением БТС и/или БТС в составе колонн, оснащенных системами управления движением, взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, которые в основном реализуют информационную, навигационную поддержку СУД БТС и БТС в составе колонн, а также обеспечивают решение задач создания информационной системы в области автотранспортной телематики, направленных на формирование баз статистических и аналитических данных о транспортных средствах и дорожной инфраструктуре, поведенческих моделей пассажиров БТС, и формирование иной информации, связанной с логистикой людей и грузов, являются:
- сложность, недостаточные надежность, оперативность и эффективность работы систем управления, высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и дублирования каждой СУД БТС завышенного количества одинаковых функций, например, анализа климатических условий, параметров дорог, анализа дорожной обстановки, выявления рисков ДТП, а также формирования и передачи команд управления на приводы управления БТС;
- завышенный массив данных, поступающих в СУД каждого БТС из систем и средств измерения параметров внешней среды от датчиков СУД БТС и СУД ИТС (климатических условий - давления, температуры, влажности, направления и скорости ветра, наличия дождя, града, снега, инея, тумана, задымленности воздуха над дорогой и др.), завышенный массив данных параметров оценки окружающей каждый отдельный БТС обстановки в виде других ТС, препятствий и предметов, людей, животных, поступающих, например, от систем технического зрения СУД БТС и СУД ИТИ (от радаров, лидаров, видеокамер, стереокамер, ультразвуковых датчиков, датчиков продольных и поперечных ускорений, датчиков систем навигации и связи, других узлов и агрегатов СУД БТС), параметров дорожной среды (дорожная карта, пропускная способность дорог и количество полос в обе стороны движения, перекрестки, уклоны и др.), а также массива данных о материалах, качестве и состоянии дорожного полотна и средств дорожной инфраструктуры (например, тип и качество дорожного полотна, его сцепные свойства, наличие на нем воды, гололеда, снега, разливов жидкостей, топлив, масел, место установки дорожных знаков, типы дорожной разметки, место установки и режимы работы светофоров), а также собственных параметров движения каждого ТС (например, скоростей вращения колес, положений рулевого управления, педалей тормозной системы, сцепления, положения рычага коробки передач, режимов работы силовых установок, параметров и режимов работы приводов управления БТС, результатов диагностики, мониторинга и работоспособности, состояния, ресурса работы БТС, СУД БТС, их систем, узлов и агрегатов и т.п.) и др., в том числе данных об авариях, пробках, пожарах, чрезвычайных ситуациях, загрязнении воздуха над дорогами;
- сложность и чрезмерно большой объем вычислительных операций, вызванных необходимостью обработки и анализа чрезмерно завышенного массива данных, поступающих от датчиков, перечисленных выше, необходимость формирования команд управления приводами в каждом СУД БТС, сложность алгоритмов управления, применяемого математического аппарата, программного обеспечения систем и подсистем управления;
невозможность устранения ложных срабатываний, сбоев в работе и выхода из строя систем управления движением на всех БТС на перспективной дороге, количество которых будет достигать по аналогии с пропускной способностью современных дорог, 40 тыс.шт.БТС/час и более. Сбои в работе и ложные срабатывания СУД БТС, состоящих из соответствующих датчиков, контроллеров, исполнительных устройств, интерфейсов, всегда будут проявляться вследствие недостаточного качества обнаружения и распознавания препятствий, дорожной разметки, знаков, сигналов светофоров, оценки состояния дорожных, погодных и климатических условий, влияния времени суток и др.;
- ограниченность диапазонов эффективной работы систем управления движением при движении БТС на всех эксплуатационных режимах - скоростных режимах движения, при разгонах, торможении, при езде на гравийных, песчаных и грунтовых дорогах, на мокром и заснеженном дорожном покрытии, при гололеде, в различное время суток, при сверхнизких и повышенных температурах внешней среды, на высокогорных дорогах и др.;
- сложность, трудоемкость и большая стоимость обслуживания каждой СУД БТС в эксплуатации, вызванная использованием сложных систем, методик проверки, а также необходимость проведения диагностики и отладки СУД в специализированных центрах с высококвалифицированными специалистами.
Важным недостатком известного способа и системы управления для его реализации является дискретность зонального управления, вызывающая излишнюю фрагментированность маршрута, которая может приводить к утрате полного и всеобъемлющего контроля за транспортным потоком и требует наличия излишне сложной системы управления для каждого БТС.
Принципиальными недостатками прототипа данного способа управления движением в составе колонн с помощью средств управления ИТИ, которые реализуют управление движением БТС в составе колонн и отдельных БТС, является недостаточная надежность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью средств ИТИ.
Отсутствие прямого оперативного измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Известен способ дистанционного управления посредством сети путевых средств беспроводной связи интеллектуальной транспортной инфраструктуры автомобильной дороги движением отдельных беспилотных транспортных средств, при котором перед началом движения для каждого БТС устанавливают индивидуальный идентификационный код и составляют описание предполагаемого, задаваемого пользователями маршрута движения каждого БТС, включающий назначение начального пункта отправления и конечного пункта прибытия, с предполагаемыми заданными временами начала движения и контрольными временами нахождения в пути и прибытия, выбранных допустимых интервалов времени нахождения в пути и в выбранных заданных направлениях движения;
каждый маршрут БТС в соответствии с известным способом передают в систему путевых центров управления СУ ИТИ, последняя получает информацию о заданных маршрутах пользователей, производит мониторинг местоположения и взаимного положения каждого БТС на выбранном пути движения, определяет порядок движения отдельных БТС и разрабатывает их маршрутные карты с учетом данных их систем технического зрения, включающих видеокамеры, радары и другие датчики по определению скоростей движения, мест ускорений и торможений впереди находящихся БТС;
результаты расчетов предварительных маршрутных карт направляют в центральный региональный центр управления, после подтверждения возможности движения всех БТС центральный региональный центр управления СУ ИТИ дает подтверждение возможности начала движения по предварительным маршрутным картам, при перегрузке отдельных дорог региональный центр управления СУ ИТИ перенаправляет часть БТС по другим дорогам и составляет для них маршрутные карты с обходными маршрутами;
после получения подтверждения возможности движения и/или маршрутных карт с обходными маршрутами и по результатам мониторинга и обмена информацией между путевыми центрами управления СУ ИТИ устанавливают контакт управления с каждым отдельным БТС СУ ИТИ производят, анализ и обработку данных, по результатам которых передают команды в СУД БТС по корректировке их маршрутов движения, режимов движения и по установлению дистанций между отдельно движущимися БТС, которые формируются с учетом внешних и внутренних условий, из которых внешними являются время суток, погодные условия, состояние дорожной обстановки на дороге, например, ее ширина, пропускная способность, тип и состояние дорожного покрытия, рельеф и высота местности, наличие дорожных знаков, дорожной разметки, светофоров и условия движения транспортного потока, включающие, по меньшей мере, наличие препятствий, интенсивность транспортного потока, его состав, позиционирование БТС, а внутренними могут быть такие как тип и характеристики БТС по весу, габаритам, маршруты движения, техническое состояние транспортного средства (возраст, пробег, состояние трансмиссии тормозной системы, рулевого управления, температура двигателя каждого отдельного БТС, показания одометра), возраст водителя, время, в течение которого водитель находится за рулем транспортного средства и оставшееся время для водителя до конца движения каждого БТС по маршруту, а также информация о пользователях, перевозимых грузах и их назначении, времени погрузки, нахождении грузов в каждом отдельном БТС во время их движения по маршруту (см. патент КНР № CN 106940933 А, INTELLIGENT TRAFFIC SYSTEM-BASED INTELLIGENT VEHICLE LANE CHANGING DECISION-MAKING METHOD, заявитель BEIJING INSTITUTE OF TECH  опубл. 11.07.2017).
опубл. 11.07.2017).
Недостатками данного известного способа управления движением БТС и/или БТС в составе колонн, оснащенных системами управления движением и взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, также являются сложность, недостаточные надежность и эффективность работы и высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и выполнения каждой СУД БТС завышенного количества дублируемых функций анализа климатических условий, параметров дорог, анализа дорожной обстановки, выявления рисков ДТП, а также формирования и передачи СУД БТС команд управления на собственные привода управления.
Важным недостатком системы управления движением является также излишне сложное, зарегламентированное в ней выполнение маневров БТС.
Принципиальными недостатками прототипа известного способа управления движением в составе колонн с помощью средств управления ИТИ, которые реализуют управление движением БТС в составе колонн и отдельных БТС, является недостаточная надежность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью средств ИТИ.
Отсутствие прямого оперативного измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Известен способ дистанционного управления посредством сети путевых средств беспроводной связи интеллектуальной транспортной инфраструктуры автомобильной дороги движением отдельных беспилотных транспортных средств, при котором перед началом движения для каждого БТС устанавливают их индивидуальный идентификационный код и составляют описание предполагаемого, задаваемого пользователями маршрута движения каждого БТС и их колонн, включающее начальные пункты отправления и конечные пункты прибытия, с предполагаемыми заданными временами начала движения и контрольными временами нахождения в пути и прибытия, выбранных допустимых интервалов времени нахождения в пути и в выбранных заданных направлениях движения;
затем каждый маршрут каждого БТС и каждой колонны БТС передают в систему путевых центров управления ИТИ, последняя получает информацию о заданных маршрутах пользователей, производит мониторинг местоположения и взаимного положения каждого БТС, а также БТС в составе колонны и колонны в целом на выбранном пути движения, и определяет порядок движения отдельных БТС и разрабатывает их маршрутные карты с учетом данных их систем технического зрения, включающих видеокамеры, радары и другие датчики по определению скоростей движения, мест ускорений и торможений впереди находящихся БТС по отношению как к каждому отдельному, так и БТС, находящемуся в составе колонны;
результаты расчетов предварительных маршрутных карт направляют в центральный региональный центр управления, после подтверждения возможности движения всех БТС и/или БТС в составе колонны центральный региональный центр управления СУ ИТИ дает подтверждение возможности начала движения по предварительным маршрутным картам, при перегрузке отдельных дорог региональный центр управления СУ ИТИ перенаправляет часть БТС и/или БТС в составе колонн по другим дорогам и составляет для них маршрутные карты с обходными маршрутами;
после получения подтверждения возможности движения и/или маршрутных карт с обходными маршрутами и по результатам мониторинга и обмена информацией между путевыми центрами управления СУ ИТИ устанавливают контакт управления с каждым отдельным БТС и/или БТС в составе колонн, СУ ИТИ производят, анализ и обработку данных, по результатам которых передают команды в системы управления движением БТС по корректировке их маршрутов движения, режимов движения и по установлению дистанций между отдельно движущимися БТС, которые формируются с учетом внешних и внутренних условий, из которых внешними являются время суток, погодные условия, состояние дорожной обстановки на дороге, например, ее ширина, пропускная способность, тип и состояние дорожного покрытия, рельеф и высота местности, наличие дорожных знаков, дорожной разметки, светофоров и условия движения транспортного потока, включающие, по меньшей мере, наличие препятствий, интенсивность транспортного потока, его состав, позиционирование БТС и групп БТС, а внутренними могут быть такие как тип и характеристики БТС по весу, габаритам, маршруты движения, техническое состояние транспортного средства (возраст, пробег, состояние трансмиссии тормозной системы, рулевого управления, температура двигателя каждого отдельного и в составе группы БТС, показания одометра), возраст водителя, время, в течение которого водитель находится за рулем транспортного средства и оставшееся время для водителя до конца движения каждых групп и БТС по маршруту, а также информация о пользователях, перевозимых грузах и х назначении, времени погрузки, нахождении грузов в каждом БТС в составе групп и в отдельных БТС во время их движения по маршруту (см. патент КНР № CN 105702072 А, 1оТ-based traffic and transportation system, заявитель WEIFANG UNIV OF SCIENCE & TECH  опубл. 22.06.2016).
опубл. 22.06.2016).
Важными недостатками данного известного способа управления движением БТС и/или БТС в составе колонн, оснащенных системами управления движением и взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, также являются сложность, недостаточная надежность работы и высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и дублирования каждой СУД БТС завышенного количества дублируемых функций анализа климатических условий, параметров дорог, дорожной обстановки, выявления рисков ДТП, а также формирования и передачи СУД БТС команд управления на собственные привода управления.
Также недостатком данной системы управления является излишне зарегламентированная последовательность изменения направления и порядка движения БТС, требующая применения чрезмерно сложных систем управления на БТС, снижающих оперативность управления.
Принципиальными недостатками прототипа и данного способа управления движением в составе колонн с помощью средств управления ИТИ, которые реализуют управление движением БТС в составе колонн и отдельных БТС, является недостаточная надежность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью средств ИТИ.
Отсутствие прямого измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Известен способ дистанционного управления посредством сети путевых средств беспроводной связи интеллектуальной транспортной инфраструктуры автомобильной дороги движением отдельных беспилотных транспортных средств и/или их колонн, при котором перед началом движения для каждого БТС и/или участника колонны устанавливают их индивидуальный идентификационный код и составляют описание предполагаемого, задаваемого пользователями маршрута движения каждого БТС и их колонн, включающее начальные пункты отправления и конечные пункты прибытия, с предполагаемыми заданными временами начала движения и контрольными временами нахождения в пути и прибытия, выбранных допустимых интервалов времени нахождения в пути и в выбранных заданных направлениях движения;
затем каждый маршрут БТС и их колонн передают в систему путевых центров управления ИТИ, последняя получает информацию о заданных маршрутах пользователей, производит мониторинг местоположения и взаимного положения каждого БТС в составе колонны, колонны в целом на выбранном пути движения и определяет порядок движения отдельных БТС и разрабатывает их маршрутные карты; с учетом данных их систем технического зрения, включающих видеокамеры, радары и другие датчики по определению скоростей движения, мест ускорений и торможений впереди находящихся БТС по отношению как к каждому отдельному, так и находящемуся в составе колонны БТС;
результаты расчетов предварительных маршрутных карт направляют в центральный региональный центр управления, после подтверждения возможности движения всех БТС и/или БТС в составе колонн центральный региональный центр управления СУ ИТИ дает подтверждение возможности начала движения по предварительным маршрутным картам, при перегрузке отдельных дорог региональный центр управления СУ ИТИ перенаправляет часть БТС и/или БТС в составе колонн по другим дорогам и составляет для них маршрутные карты с обходными маршрутами;
после получения подтверждения возможности движения и/или маршрутных карт с обходными маршрутами и по результатам мониторинга и обмена информацией между путевыми центрами управления СУ ИТИ устанавливают контакт управления с каждым отдельным БТС и/или БТС в составе колонн СУ ИТИ производят, анализ и обработку данных, по результатам которых передают команды в СУ лидерам колонн и в системы управления движением БТС по корректировке их маршрутов движения, режимов движения и по установлению дистанций между отдельно движущимися БТС, которые формируются с учетом внешних и внутренних условий, из которых внешними являются время суток, погодные условия, состояние дорожной обстановки на дороге, например, ее ширина, пропускная способность, тип и состояние дорожного покрытия, рельеф и высота местности, наличие дорожных знаков, дорожной разметки, светофоров и условия движения транспортного потока, включающие, по меньшей мере, наличие препятствий, интенсивность транспортного потока, его состав, позиционирование БТС и колонн БТС, а внутренними могут быть такие как тип и характеристики БТС по весу, габаритам, маршруты движения, техническое состояние транспортного средства (возраст, пробег, состояние трансмиссии тормозной системы, рулевого управления, температура двигателя каждого отдельного и в составе колонны БТС, показания одометра), возраст водителя, время, в течение которого водитель находится за рулем транспортного средства и оставшееся время для водителя до конца движения каждых колонн и БТС по маршруту, а также информация о пользователях, перевозимых грузах и х назначении, времени погрузки, нахождении грузов в каждом БТС в составе колонн и в отдельных БТС во время их движения по маршруту, (см. патент КНР №CN 107507444 A, SMART ROAD SYSTEM FOR UNMANNED DRIVING AND CONTROL METHOD THEREOF, заявитель UNIV CHONGQING SCI & TECH ±  опубл. 22.12.2017),
опубл. 22.12.2017),
Важными недостатками данного известного способа управления движением БТС и/или БТС в составе колонн, оснащенных системами управления движением и взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, также являются сложность, недостаточная надежность работы и высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и дублирования каждой СУД БТС завышенного количества дублируемых функций анализа климатических условий, параметров дорог, анализа дорожной обстановки, выявления рисков ДТП, а также формирования и передачи СУД БТС команд управления на собственные привода управления.
Также недостатком системы управления является излишне сложная система управления движением, которая реагирует только на вновь обнаруженные препятствия, требующая для их объезда использования еще более сложной СУД на БТС.
Принципиальными недостатками прототипа этого способа управления движением в составе колонн с помощью средств управления ИТИ, которые реализуют управление движением БТС в составе колонн и отдельных БТС, является недостаточные надежность, оперативность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью средств ИТИ.
Отсутствие прямого измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Известен способ дистанционного управления посредством сети путевых средств беспроводной связи интеллектуальной транспортной инфраструктуры автомобильной дороги движением отдельных беспилотных транспортных средств и/или их колонн, при котором перед началом движения для каждого БТС и/или участника колонны устанавливают их индивидуальный идентификационный код и составляют описание предполагаемого, задаваемого пользователями маршрута движения каждого БТС и колонн в составе БТС, включающее начальные пункты отправления и конечные пункты прибытия, с предполагаемыми заданными временами начала движения и контрольными временами нахождения в пути и прибытия, выбранных допустимых интервалов времени нахождения в пути и в выбранных заданных направлениях движения;
затем каждый маршрут БТС и их колонн передают в систему путевых центров управления ИТИ, последняя получает информацию о заданных маршрутах пользователей, производит мониторинг местоположения и взаимного положения каждого БТС в составе колонны, колонны в целом на выбранном пути движения, подбирает лидера колонны и определяет порядок движения отдельных БТС и разрабатывает их маршрутные карты;
результаты расчетов предварительных маршрутных карт направляют в центральный региональный центр управления, после подтверждения возможности движения всех БТС и/или БТС в составе колонн центральный региональный центр управления СУ ИТИ дает подтверждение возможности начала движения по предварительным маршрутным картам, при перегрузке отдельных дорог региональный центр управления СУ ИТИ перенаправляет часть БТС и/или БТС в составе колонн по другим дорогам и составляет для них маршрутные карты с обходными маршрутами;
после получения подтверждения возможности движения и/или маршрутных карт с обходными маршрутами и по результатам мониторинга и обмена информацией между путевыми центрами управления СУ ИТИ устанавливают контакт управления с каждым отдельным БТС и/или БТС в составе колонн СУ ИТИ производят, анализ и обработку данных, по результатам которых передают команды в СУД лидерам колонн и в системы управления движением БТС по корректировке их маршрутов движения, режимов движения и по установлению дистанций между отдельно движущимися БТС, которые формируются с учетом внешних и внутренних условий, из которых внешними являются время суток, погодные условия, состояние дорожной обстановки на дороге, например, ее ширина, пропускная способность, тип и состояние дорожного покрытия, рельеф и высота местности, наличие дорожных знаков, дорожной разметки, светофоров и условия движения транспортного потока, включающие, по меньшей мере, наличие препятствий, интенсивность транспортного потока, его состав, позиционирование БТС и колонн БТС, а внутренними могут быть такие как тип и характеристики БТС по весу, габаритам, маршруты движения, техническое состояние транспортного средства (возраст, пробег, состояние трансмиссии тормозной системы, рулевого управления, температура двигателя каждого отдельного и в составе колонны БТС, показания одометра), возраст водителя, время, в течение которого водитель находится за рулем транспортного средства и оставшееся время для водителя до конца движения БТС по маршруту, а также информация о пользователях, перевозимых грузах и х назначении, времени погрузки, нахождении грузов в каждом отдельном БТС во время их движения по маршруту (см. патент КНР №CN 107221181 A, Vehicle access vehicle networking method, заявитель CHINA MOBILE GROUP GUANGDONG ±  опубл. 29.09.2017).
опубл. 29.09.2017).
Недостатками данного известного способа управления движением БТС и/или БТС в составе колонн, оснащенных системами управления движением и взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, также являются сложность, недостаточная надежность работы и высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и дублирования каждой СУД БТС завышенного количества дублируемых функций анализа климатических условий, параметров дорог, анализа дорожной обстановки, выявления рисков ДТП, а также формирования и передачи СУД БТС команд управления на собственные привода управления.
К недостаткам известной системы управления следует отнести излишне большой объем данных для управления, передаваемый в СУД БТС, и соответственно высокая стоимость систем управления движением БТС.
Принципиальными недостатками прототипа известного способа управления движением в составе колонн с помощью средств управления ИТИ, которые реализуют управление движением БТС в составе колонн и отдельных БТС, является недостаточная надежность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью средств ИТИ.
Отсутствие прямого измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Известен способ дистанционного управления посредством сети путевых средств беспроводной связи интеллектуальной транспортной инфраструктуры автомобильной дороги движением отдельных беспилотных транспортных средств и/или их колонн, при котором перед началом движения для каждого БТС и/или участника колонны устанавливают их индивидуальный идентификационный код и составляют описание предполагаемого, задаваемого пользователями маршрута движения каждого БТС и их колонн, включающее начальные пункты отправления и конечные пункты прибытия, с предполагаемыми заданными временами начала движения и контрольными временами нахождения в пути и прибытия, выбранных допустимых интервалов времени нахождения в пути и в выбранных заданных направлениях движения;
затем каждый маршрут БТС и их колонн передают в систему путевых центров управления ИТИ, последняя получает информацию о заданных маршрутах пользователей, производит мониторинг местоположения и взаимного положения каждого БТС в составе колонны, колонны в целом на выбранном пути движения, подбирает лидера колонны и определяет порядок движения отдельных БТС и разрабатывает их маршрутные карты с учетом данных их систем технического зрения, включающих видеокамеры, радары и другие датчики по определению скоростей движения, мест ускорений и торможений впереди находящихся БТС по отношению как к каждому отдельному, так и находящемуся в составе колонны БТС;
результаты расчетов предварительных маршрутных карт направляют в центральный региональный центр управления, после подтверждения возможности движения всех БТС и/или БТС в составе колонн центральный региональный центр управления СУ ИТИ дает подтверждение возможности начала движения по предварительным маршрутным картам, при перегрузке отдельных дорог региональный центр управления СУ ИТИ перенаправляет часть БТС и/или БТС в составе колонн по другим дорогам и составляет для них маршрутные карты с обходными маршрутами;
после получения подтверждения возможности движения и/или маршрутных карт с обходными маршрутами и по результатам мониторинга и обмена информацией между путевыми центрами управления СУ ИТИ устанавливают контакт управления с каждым отдельным БТС и/или БТС в составе колонн СУ ИТИ производят, анализ и обработку данных, по результатам которых передают команды в СУ лидерам колонн и в системы управления движением БТС по корректировке их маршрутов движения, режимов движения и по установлению дистанций между отдельно движущимися БТС, которые формируются с учетом внешних и внутренних условий, из которых внешними являются время суток, погодные условия, состояние дорожной обстановки на дороге, например, ее ширина, пропускная способность, тип и состояние дорожного покрытия, рельеф и высота местности, наличие дорожных знаков, дорожной разметки, светофоров и условия движения транспортного потока, включающие, по меньшей мере, наличие препятствий, интенсивность транспортного потока, его состав, позиционирование БТС и колонн БТС, а внутренними могут быть такие как тип и характеристики БТС по весу, габаритам, маршруты движения, техническое состояние транспортного средства (возраст, пробег, состояние трансмиссии тормозной системы, рулевого управления, температура двигателя каждого отдельного и в составе колонны БТС, показания одометра), возраст водителя, время, в течение которого водитель находится за рулем транспортного средства и оставшееся время для водителя до конца движения каждых колонн и БТС по маршруту, а также информация о пользователях, перевозимых грузах и х назначении, времени погрузки, нахождении грузов в каждом БТС в составе колонн и в отдельных БТС во время их движения по маршруту (см. патент США № US 8914225 В2, MANAGING VEHICLES ON A ROAD NETWORK, заявитель INTERNATIONAL BUSINESS MACHINES CORPORATION, опубл. 16.12.2016).
Недостатками известного способа управления движением БТС и/или БТС в составе колонн, оснащенных системами управления движением, взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, которые в основном обеспечивают решение задач формирования и контроля выполнения маршрутов движения БТС и/или БТС в составе колонн, информационную, навигационную поддержку СУД БТС и/или БТС в составе колонн, а также обеспечивают решение задач создания информационной системы в области автотранспортной телематики, направленных на формирование баз статистических и аналитических данных о транспортных средствах и дорожной инфраструктуре, поведенческих моделей пассажиров и водителей, и формирование иной информации, связанной с логистикой людей и грузов, являются сложность, недостаточная надежность работы и высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и дублирования каждой СУД БТС завышенного количества дублируемых функций анализа климатических условий, параметров дорог, анализа дорожной обстановки, выявления рисков ДТП, формирования и передачи СУД БТС команд управления на собственные привода управления.
Важным недостатком способа управления движением известной СУД ИТИ является также излишне сложная система коммуникаций с использование интернет сети, которая в силу разных причин имеет сбои в работе.
Принципиальными недостатками данного способа управления движением в составе колонн с помощью средств управления ИТИ, которые реализуют управление движением БТС в составе колонн и отдельных БТС, также является недостаточная надежность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью средств ИТИ.
Отсутствие прямого измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Обобщая изложенное следует констатировать, что принципиальными недостатками перечисленных способов управления движением с помощью СУД БТС и БТС в составе колонн, известных из аналогов, оснащенных системами управления движением, взаимодействующими с системами управления интеллектуальной транспортной инфраструктуры, которые в основном реализуют информационную, навигационную поддержку СУД БТС и/или БТС в составе колонн, а также обеспечивают решение задач создания информационной системы в области автотранспортной телематики, направленных на формирование периодически обновляемых баз статистических и аналитических данных о транспортных средствах и дорожной инфраструктуре, возникающих нештатных ситуациях, связанных с климатическими факторами, поведенческих моделей пассажиров и водителей, и формирование иной информации, связанной с логистикой людей и грузов, являются следующие:
1. Сложность, недостаточная надежность работы и высокая стоимость систем управления движением всех БТС в эксплуатации, вызванная необходимостью выполнения и дублирования каждой СУД БТС завышенного количества дублируемых функций по постоянному мониторингу и анализу климатических условий, параметров дорог, анализу дорожной, обстановки, выявления рисков ДТП, формирования и передачи СУД БТС команд управления на собственные приводы управления.
2. Завышенный массив данных, поступающих в СУД каждого БТС из систем и средств измерения параметров внешней среды от датчиков СУД БТС и СУД ИТС (климатических условий - давления, температуры, влажности, направления и скорости ветра, наличия дождя, града, снега, инея, тумана, задымленности воздуха над дорогой и др.), параметров оценки окружающей каждый отдельный БТС обстановки в виде других ТС, препятствий и предметов, людей, животных, поступающих, например, от систем технического зрения СУД БТС и СУД ИТИ (от радаров, лидаров, видеокамер, стереокамер, ультразвуковых датчиков, датчиков продольных и поперечных ускорений, датчиков систем навигации и связи, других узлов и агрегатов СУД БТС), параметров дорожной среды (дорожная карта, пропускная способность дорог и количество полос в обе стороны движения, перекрестки, уклоны и др.), а также материала, качества и состояния дорожного полотна и средств дорожной инфраструктуры (например, тип и качество дорожного полотна, его сцепные свойства, наличие на нем воды, гололеда, снега, разливов жидкостей, топлив, масел, место установки дорожных знаков, типы дорожной разметки, место установки и режимы работы светофоров), а также собственных параметров движения каждого ТС (например, скоростей вращения колес, положений рулевого управления, педалей тормозной системы, сцепления, положения рычага коробки передач, режимов работы силовых установок, параметров и режимов работы приводов управления БТС, результатов диагностики, мониторинга и работоспособности, состояния, ресурса работы БТС, СУД БТС, их систем, узлов и агрегатов и т.п.) и др., в том числе данных об авариях, пробках, пожарах, чрезвычайных ситуациях, загрязнении воздуха над дорогами.
3. Сложность и чрезмерно большой объем вычислительных операций, вызванный необходимостью обработки и анализа чрезмерно завышенного массива данных, поступающих от датчиков, перечисленных в п. 2, необходимость формирования команд управления приводами в каждом СУД БТС, сложность алгоритмов управления, применяемого математического аппарата, программного обеспечения систем и подсистем управления, что снижает оперативность управления и безопасность.
4. Невозможность полного устранения ложных срабатываний, сбоев в работе и выхода из строя систем управления движением, их датчиков и компонентов на всех без исключения БТС на маршрутах их движения, количество которых будет достигать по аналогии с пропускной способностью современных дорог, 40 тыс. шт. БТС/час и более. Сбои в работе и ложные срабатывания СУД БТС, состоящих из соответствующих датчиков, контроллеров, исполнительных устройств, интерфейсов, будут происходить вследствие недостаточного качества обнаружения и распознавания датчиками препятствий, дорожной разметки, знаков, сигналов светофоров, вследствие сбоев при оценке состояния дорожных, погодных и климатических условий, из-за влияния осадков, времени суток и др.
5. Ограниченность надежной работы систем управления движением при движении БТС на всех эксплуатационных режимах - скоростных режимах движения, движении на виражах, при разгонах, торможении, при езде на гравийных, песчаных и грунтовых дорогах, на мокром и заснеженном дорожном покрытии, при гололеде, в различное время суток, при сверхнизких и повышенных температурах внешней среды, на высокогорных дорогах и др.
6. Сложность, трудоемкость и большая стоимость СУД БТС и обслуживания их в эксплуатации, вызванные использованием сложных систем, методик проверки и необходимостью проведения диагностики и отладки СУД в специализированных центрах с высококвалифицированными специалистами.
Перечисленные недостатки большинства технических решений управления движением за счет СУ БТС, ограниченно взаимодействующие с системами управления интеллектуальной транспортной инфраструктуры, которые в основном реализуют информационную, навигационную поддержку СУД БТС и/или БТС в составе колонн, а также обеспечивают решение задач создания информационной системы в области автотранспортной телематики, направленной на формирование баз статистических и аналитических данных о транспортных средствах и дорожной инфраструктуре, поведенческих моделей пассажиров и водителей, и формирование иной информации, связанной с логистикой перевозки людей и грузов, не обеспечивают гарантированной и высокой надежности и эффективности управления движением БТС и в наибольшей степени могут быть реализованы путем передачи практически всех функций управления движением от СУД БТС в СУ ИТИ.
Известен способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств интеллектуальной транспортной инфраструктурой сети автомобильных дорог (См. заявку «Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог» государственная регистрация №2018144828/11-074921 от 18.12.2018), в котором через путевые средства беспроводной связи соответствующего путевого центра управления передают к региональному центру управления и после обработки от регионального центра управления получают информацию о маршруте, и через которые пользователи колонн БТС и/или отдельных БТС задают маршруты их движения с данными о пунктах отправления, промежуточных остановок и прибытия с заданным временем нахождения в пути, и передают перечисленные данные в региональный центр управления интеллектуальной транспортной инфраструктурой (ЦУ ИТИ), где их обрабатывают, рассчитывают окончательные оптимальные маршруты, составляют маршрутные карты и передают их полностью или порционно в путевые центры управления, которые передают команды, разрешающие движение каждому БТС и/или каждому БТС в составе колонны в автоматическом режиме по их маршруту в соответствии с их маршрутными картами;
причем с помощью путевого ЦУ ИТИ выполняют следующие действия;
1. перед началом движения для каждого БТС и/или каждого БТС в составе колонны устанавливают или определяют имеющийся у них индивидуальный идентификационный код, производят согласно индивидуальным идентификационным кодам каждого из БТС в составе колонн и/или отдельных БТС их идентификацию, регистрацию маршрута и начального местоположения, а после начала движения выполняют мониторинг параметров движения каждого из БТС в составе колонн, и/или отдельных БТС на полосах движения согласно дорожной разметки, скорости движения, ускорений, торможений и их взаимного положения;
2. определяют порядок движения и разрабатывают предварительные маршрутные карты для всех БТС, вновь вступающих в движение в составе колонн, и/или для каждого из отдельных БТС или выявляют команды регионального центра управления, изменяющие их порядок движения по существующим маршрутным картам;
3. контролируют состояние всей дорожной обстановки на всей сети автомобильных дорог путем анализа данных, поступающих от пользователей, собственных систем управления движением БТС и внешних путевых систем контроля, анализа и мониторинга дорожных условий ИТИ, производят анализ, по меньшей мере, таких характеристик, как маршрут движения и его выполнение, тип и тактико-технические характеристики каждого БТС, его систем, узлов и агрегатов, вес, габариты, грузоподъемность, техническое состояние БТС и его агрегатов, а также, по меньшей мере, таких данных о перевозимых грузах, как их назначение, степень опасности, время погрузки и доставки, а при анализе информации от внешних путевых систем контроля, анализа и мониторинга дорожных условий производят и анализируют, по меньшей мере, такие данные, как колебания и изменения суточных, погодных и иных климатических условий и их прогнозов в зонах автомобильных дорог по маршруту, параметры позиционирования каждого БТС, а также от путевых систем контроля, анализа и мониторинга дорожных условий производят формирование и анализ, по меньшей мере таких данных о дороге, как ее ширина, пропускная способность в обоих направлениях, типы и состояние дорожного покрытия, наличие дорожных знаков, дорожной разметки, светофоров, а также условия и интенсивность движения транспортного потока, его состав разрешенные скорости движения, порядок последовательного ускорения и торможения каждого из БТС в составе колонн и/или отдельных БТС, а также других транспортных средств, возникновение аварийных ситуаций, проведение плановых или срочных строительно-дорожных работ;
4. на каждом участке дорожного полотна, подконтрольном соответствующему путевому центру управления сети автомобильных дорог, посредством локальных и/или распределенных датчиков состояния движения, расположенных вдоль дорог рассчитанного маршрута, контролируют состояние дорожной обстановки и условия движения транспортного потока, включая, по меньшей мере, данные о рельефе местности, интенсивности транспортного потока, его составе, позиционировании каждого БТС на полосах движения и оптимальном распределении на них БТС и/или БТС в составе колонн;
5. производят анализ и обработку, по меньшей мере, всех перечисленных данных, передают их в региональный центр управления, обрабатывают и по результатам обработки которых формируют и корректируют маршруты движения, маршрутные карты и передают их и команды, разрешающие движение каждому БТС и/или каждому БТС в составе колонны в автоматическом режиме по их маршруту с обеспечением задаваемых маршрутными картами скоростных режимов движения, ускорений, торможений и дистанций между каждым из БТС в колонне и/или отдельных БТС, причем при перегрузке отдельных дорог составляют для части колонн БТС и/или отдельных БТС уточненные маршрутные карты с обходными маршрутами по другим дорогам дорожной сети и соответствующие команды, разрешающие движение в автоматическом режиме для этой части БТС, разработанные в региональном центре ЦУ ИТИ в подконтрольной региональному ЦУ ИТИ сети автомобильных дорог,
причем при реализации данного способа:
1. - в региональном центре управления ИТИ с заданной периодичностью с помощью дополнительных собственных внешних путевых систем технического зрения, включающих, по меньшей мере, видеокамеры и радары, установленные вдоль дорог и над ними, и технических средств мониторинга и контроля дорожных условий дополнительно в режиме реального времени производят сканирование, распознавание, регистрацию всех движущихся и неподвижных объектов и определяют параметры их положения и движения на дорогах и прилегающих к ним территориях по маршрутам их движения;
2. - также дополнительно выполняют с заданной периодичностью и с учетом данных сканирования сбор, обработку, анализ и обновление баз данных о дорожных условиях, по меньшей мере, таких как временные дорожные ограничения, материал и свойства дорожного полотна, наличие и указания регулировщика дорожного движения, наличие чрезвычайных ситуаций;
3. - далее с заданной периодичностью дополнительно осуществляют обновление баз данных по мониторингу состояния климатических и экологических условий внешней среды в зонах сети автомобильных дорог и сбор с помощью путевых штатных и дополнительных датчиков, установленных вдоль автомобильных дорог, над ними и в дорожном полотне, по меньшей мере, таких данных, как температура дорожного полотна, снижающие прозрачность и видимость на дороге воздушные аэрозоли и атмосферные осадки, наличие на дорожном полотне сконденсировавшейся или замороженной влаги, содержание вредных веществ в воздухе, в виде таких веществ, как газообразные вещества, твердые или жидкостные аэрозоли;
4. - так же по результатам анализа и обработки перечисленных обновленных и дополненных данных в соответствии с заранее задаваемыми критериями опасности груза и маршрута определяют значения параметров движения каждого БТС, сравнивают их с граничными значениями, характеризующими критические их величины в отношении движения каждого из БТС в составе колонн и/или отдельных БТС, при необходимости, производят коррекцию маршрутов и/или режимов их движения и, после выполнения всех перечисленных действий, в региональном ЦУ ИТИ для подконтрольной ЦУ ИТИ сети автомобильных дорог формируют и передают команды управления в путевые центры управления, которые осуществляют управление движением каждого БТС в составе колонн и/или отдельных БТС путем передачи команд управления непосредственно на их приводы управления, по меньшей мере, поворотом колес, тормозной системой и тяговой установкой, а также, при наличии, коробкой передач и сцеплением;
5. - кроме этого весь цикл управления движением каждого БТС в составе колонн и/или отдельных БТС с помощью ЦУ ИТИ производят с учетом движения всех БТС в составе колонн и/или отдельных БТС, а также ТС на всех дорогах, примыкающих к маршрутам движения каждого из БТС в составе колонн и/или отдельных БТС;
6. - наконец в соответствии с данным способом с помощью ЦУ ИТИ на длинных маршрутах движения производят весь цикл управления движением каждого из БТС в составе колонн и/или отдельных БТС под полным и постоянным контролем путевых центров управления согласно маршрутной карте регионального ЦУ ИТИ, передаваемых полностью или порционно через путевые и/или региональные центры управления сети автомобильных дорог в пределах сегментов территории обслуживания каждого из них.
В данном способе, принятым за прототип настоящего изобретения, проблема повышения надежности, оперативности и эффективности управления транспортным потоком БТС и колонн из БТС и качества управления движением БТС на дороге, решается не только путем постоянного мониторинга оптимизации маршрутов движения, но и за счет повышения точности позиционирования каждого из ТС, БТС и колонн из БТС на дороге своевременного выявления нештатных ситуаций и предпосылок к ним оповещения всех заинтересованных в использовании этой информации участников движения, в том числе и об изменении положения относительно других участников дорожного движения. Для этого выполняется постоянная подача команд по изменению направления движения и положения из-за отклонений от среднего положения каждого БТС на дорожном полотне в пределах его полосы движения, так как оно постоянно изменяется из-за случайных причин, таких как, неровности дорожного покрытия, неравномерные триботехнические показатели дорожного покрытия (например, коэффициенты трения, сцепления с дорожным покрытием и гранулометрические показатели наполнителя покрытия, определяющего шероховатость или ровность дорожной поверхности, и т.д.). Кроме этого для повышения надежности и эффективности управления обеспечение безопасности режимов движения достигается путем минимизации числа выполняемых маневров каждым БТС и каждой колонной БТС на дороге относительно других участников дорожного движения даже при быстром изменении дорожных условий, а также за счет минимизации маневров и отклонений от оптимального режима движения, соответствующего, например, таким параметрам, как минимальный расход топлива и/или минимизация вредных выбросов. Это позволяет снизить нагрузки на средства связи и управления движением. В данном способе осуществлена автоматизация процесса позиционирования при минимизации управляющих команд путем упрощения сигнала о передаваемой информации по выполнению действий позиционирования, контроля и управления, а также за счет автоматизации позиционирования БТС на дорожном полотне путем постоянного отслеживания и корректировки случайных спорадических отклонений от основного курса на маршруте. В наибольшей степени этого достигается при помощи штатных и дополнительно установленных датчиков и средств позиционирования БТС на дорогах в дорожном полотне и/или внешних датчиков, установленных сбоку и/или над дорогами, входящих в состав СУ ИТИ, а также с путем разработки алгоритмов управления и программного обеспечения, реализуемых в СУ ИТИ, для непосредственной передачи команд управления от путевого ЦУ ИТИ напрямую в приводы управления БТС и/или БТС в составе колонн.
Вместе с тем, принципиальными недостатками прототипа «Способа управления движением БТС в составе колонн и/или отдельных БТС с помощью средств управления ИТИ», которые реализуют управление движением БТС в составе колонн и отдельных БТС, является недостаточная надежность и эффективность управления движением каждого БТС по маршруту вследствие отсутствия прямой идентификации (измерения) коэффициента сцепления колес БТС с дорожным покрытием, который не может точно измеряться с помощью штатных средств ИТИ.
Изменение величины коэффициента сцепления колес БТС с дорожным покрытием в процессе езды, учет которого необходим для обеспечения безопасного управления движением БТС, зависит от:
- материала дорожного полотна, например, бетонного, асфальтобетонного, грунтового, песчаного и др.;
- изменения температуры и влажности окружающего воздуха, дорожного покрытия, шин;
- наличия на участках дорожного полотна воды, снега, льда, в результате чего изменяется величина сцепления шины с дорожным полотном;
- изменения во время движения БТС давления воздуха в шине;
- изменения величины давления шины на дорожное полотно, например, меняющегося вследствие аэродинамического прижима корпуса ТС или БТС;
- влияния на величину сцепления шины с дорожным полотном ее размерности и таких параметров, как материал, рисунок протектора, степень износа протектора, наличие шипов;
- изменения температуры и влажности наружной поверхности шины, направления ее движения, скорости движения каждого БТС;
- перераспределения массы каждого БТС по осям при перегрузе на промежуточных остановках в процессе прохождения БТС по заданному маршруту движения, динамического смещения незакрепленного груза на поворотах.
Отсутствие прямого измерения коэффициента сцепления колес с дорожным покрытием с помощью программно-аппаратных средств ИТИ при управлении движением БТС на маршруте движения может приводить к недопустимым отклонениям положения БТС от заданной траектории, к несвоевременному корректированию режима движения, к сносам, заносам и опрокидыванию БТС, превышению границ безопасности скоростного режима движения БТС в режиме круиз-контроля и, таким образом, может являться причиной ДТП.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в реализации постоянных косвенных измерений параметров предпосылок к нештатным ситуациям, прогнозировании и предотвращении дрифта колес каждого БТС путем дополнительного определения угловой скорости дрифта колес с помощью дополнительных средств каждого БТС, выполнения ими расчетов и передачи сигналов о приближении к границам критического режима возникновения дрифта колес в региональные центры управления ИТИ, которые во взаимодействии с путевыми ЦУ ИТИ по заданным программам производят коррекцию управления режимами движения каждого БТС посредством передачи скорректированных команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС. Решение поставленной задачи обеспечивает исключение превышения границ безопасного скоростного режима движения БТС в режиме круиз-контроля, а также недопустимого отклонения положения каждого БТС от заданной траектории движения, и по этой причине, исключает возникновение явлений сноса, заноса, опрокидывания БТС в составе колонн и/или отдельных БТС. При этом через путевыми ЦУ ИТИ по заданным программам производят мониторинг коррекцию управления режимами движения
Следует разъяснить значение основных терминов, используемых в описании.
Путевой центр управления включает путевые средства связи, путевой процессор управления и управляет дорожным движением каждого БТС и каждой колонны БТС по соответствующему маршруту на участке обслуживания, на подконтрольном путевому серверу и пределах участков устойчивой передачи всей необходимой информации его средствами связи. Для устойчивой и надежной связи и передачи информации, зоны действия средств связи путевых центров управления должны пересекаться и работать взаимно согласовано и последовательно, чтобы сигналы от соседних серверов и их средств связи не мешали один другому.
Региональный центр управления ИТИ (РЦУ ИТИ или центр управления ИТИ региона) предназначен для выбора и оптимизации каждого маршрута в сети дорог региона и его оптимизации для каждого БТС и/или каждой колонны БТС в соответствии с возможностями и состоянием путевых центров управления, пропускной и нагрузочной способностью дорог, выбранных для осуществления и выполнения движения каждого БТС и каждой колонны БТС по соответствующему маршруту, т.е. оптимального по времени движения и/или кратчайшего по расстоянию движения, по минимизации вредных выбросов или другим критериям, например, по материальным затратам, таким как общий (на весь маршрут) или удельный (на километр пути, или тонно-километр транспортной работы) расход топлива, и т.д.
Очевидно, что если маршрут длинный и проходит по нескольким регионам, то составление такого маршрута должно происходить или на центральном сервере межрегионального центра управления ИТИ соответствующего уровня, или же путем взаимного объединения региональных частей маршрута, позволяющим составить, синхронизировать конец одной части маршрута с началом следующей части во взаимосвязанных регионах или объединить отдельные части маршрута от региональных центров управления ИТИ другими известными средствами.
Оперативность управления определяется временем реагирования на возникновение причины нарушения режима движения и ее устранения или изменения параметров движения. Так, например, порыв бокового ветра должен быть скомпенсирован в пределах изменения параметров движения БТС на полосе движения, иначе возможно столкновение с транспортом, движущемся в спутном или противоположном направлении. При этом такое же действие должно быть совершено соседними ТС, начиная с первого подвергшегося его действию. При этом оперативное оповещение соседних транспортных средств должно привести и к их реакции на порыв ветра и на маневр первого ТС. Оперативность управления особенно актуальна для высокоплотного потока транспорта.
Поставленная техническая задача решается тем, что в способе управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС интеллектуальной и мониторинга транспортной инфраструктурой (ИТИ) сети автомобильных дорог, в котором через путевые средства беспроводной связи соответствующего путевого центра управления передают к региональному центру управления и после обработки от регионального центра управления получают информацию о маршруте, и через которые пользователи колонн БТС и/или отдельных БТС задают маршруты их движения с данными о пунктах отправления и прибытия, о промежуточных остановках, и передают перечисленные данные в региональный центр управления интеллектуальной транспортной инфраструктурой (ЦУ ИТИ), где их обрабатывают, рассчитывают окончательные оптимальные маршруты, составляют маршрутные карты и передают их полностью или порционно в путевые центры управления, которые передают команды, разрешающие каждому БТС и/или каждому БТС в составе колонны движение в автоматическом режиме по их маршруту в соответствии с их маршрутными картами;
причем, с помощью путевого ЦУ ИТИ выполняют следующие действия:
перед началом движения для каждого БТС и/или каждого БТС в составе колонны устанавливают или определяют имеющийся у них индивидуальный идентификационный код, согласно которому производят идентификацию каждого БТС, регистрацию его маршрута и начального пункта местоположения, а после начала движения выполняют оперативный мониторинг параметров движения каждого БТС на полосах движения согласно дорожной разметки, скорости движения, ускорений, торможений и их взаимного положения;
определяют порядок движения и разрабатывают предварительные маршрутные карты для всех БТС, вновь вступающих в движение в составе колонн, и/или отдельных БТС или обрабатывают команды регионального центра управления, изменяющие их порядок движения по существующим маршрутным картам;
контролируют состояние всей дорожной обстановки на всей сети автомобильных дорог путем анализа данных, поступающих от пользователей, собственных систем управления движением БТС и внешних путевых систем контроля, анализа и мониторинга дорожных условий ИТИ, производят анализ характеристик, по меньшей мере, таких, как маршрут движения и его выполнение, тип и тактико-технические характеристики каждого БТС, его систем, узлов и агрегатов, вес, габариты, грузоподъемность, техническое состояние БТС и его агрегатов, а также, по меньшей мере, анализ данных о перевозимых грузах, их назначении, степени опасности, времени погрузки и доставки, и при анализе информации от внешних путевых систем контроля, анализе и мониторинге дорожных условий так же производят анализ, по меньшей мере, таких данных об окружающей среде, как колебания и изменения суточных, погодных и иных климатических условий и соответствие их прогнозам в зонах автомобильных дорог по маршруту движения, параметры позиционирования каждого БТС, а также от путевых систем контроля, анализа и мониторинга дорожных условий производят формирование и анализ, по меньшей мере, таких данных о дороге, как ее ширина, пропускная способность в обоих направлениях, типы и состояние дорожного покрытия, наличие дорожных знаков, дорожной разметки, светофоров, условия и интенсивность движения транспортного потока, его состав, разрешенные скорости движения, расстояния между БТС, ускорения и торможения каждого из БТС в составе колонн и/или отдельных БТС, а также других транспортных средств, возникновение нештатных ситуаций, проведение плановых или срочных строительно-дорожных работ;
при этом на каждом участке дорожного полотна, подконтрольном соответствующему путевому центру управления сети автомобильных дорог, посредством локальных и/или распределенных датчиков состояния движения, расположенных вдоль дорог рассчитанного маршрута, контролируют состояние дорожной обстановки и условия движения транспортного потока, включая, по меньшей мере, данные о рельефе местности, интенсивности транспортного потока, его составе, позиционировании каждого БТС на полосах движения и оптимальном распределении на них БТС и/или БТС в составе колонн;
по результатам контроля производят анализ и обработку перечисленных данных, передают их в региональный центр управления, в котором их обрабатывают и по результатам обработки которых формируют и корректируют маршруты движения, маршрутные карты и передают их и команды, разрешающие движение каждому БТС и/или каждому БТС в составе колонны в автоматическом режиме по их маршруту с обеспечением задаваемых маршрутными картами скоростных режимов движения, ускорений, торможений, дистанций между каждым из БТС в колонне и/или отдельных БТС, в путевые ЦУ ИТИ и проводят мониторинг исполнения, причем по результатам мониторинга при перегрузке отдельных дорог составляют для части колонн БТС и/или отдельных БТС уточненные маршрутные карты с обходными маршрутами по другим дорогам дорожной сети и соответствующие команды, разрешающие движение в автоматическом режиме для этой части БТС;
далее в региональном центре управления ИТИ с заданной периодичностью с помощью дополнительных собственных внешних путевых систем технического зрения, включающих, по меньшей мере, видеокамеры и радары, установленные вдоль дорог и над ними, и технических средств мониторинга и контроля дорожных условий дополнительно в режиме реального времени производят сканирование, распознавание, регистрацию всех движущихся и неподвижных объектов и определяют их потенциально авариную опасность параметры их положения и движения на дорогах и прилегающих к ним территориях по маршрутам их движения;
так же в региональном ЦУ ИТИ дополнительно выполняют с заданной периодичностью мониторинг и с учетом данных сканирования, распознавания и регистрации сбор, обработку, анализ и обновление баз данных о дорожных условиях, по меньшей мере, таких как временные дорожные ограничения, материалы и параметры дорожного полотна, наличие чрезвычайных ситуаций;
далее с заданной периодичностью дополнительно осуществляют обновление баз данных по мониторингу состояния климатических и экологических условий внешней среды в зонах сети автомобильных дорог, сбор с помощью путевых штатных и дополнительных датчиков, установленных вдоль автомобильных дорог, над ними и в дорожном полотне, по меньшей мере, таких данных об окружающей среде, как температура дорожного полотна, наличие снижающих прозрачность и видимость на дороге воздушных аэрозолей и атмосферных осадков, наличие на дорожном полотне сконденсировавшейся или замороженной влаги, содержание вредных веществ в воздухе, например, таких, как газообразные вещества, твердые или жидкостные аэрозоли;
по результатам анализа и обработки перечисленных обновленных и дополненных данных в соответствии с заранее задаваемыми критериями безопасности дорожного движения определяют значения параметров движения каждого БТС, сравнивают их с граничными значениями, характеризующими критические их величины в отношении обеспечения безопасности движения каждого из БТС в составе колонн и/или отдельных БТС, и, при необходимости, производят коррекцию маршрутов и/или режимов их движения;
далее в региональном ЦУ ИТИ для подконтрольной ЦУ ИТИ сети автомобильных дорог формируют и передают команды управления в путевые центры управления, которые осуществляют управление движением каждого БТС в составе колонн и/или отдельных БТС путем передачи команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления, их работу в составе каждого БТС и/или отдельных БТС в составе колонн, ПРИЧЕМ на каждом БТС в составе колонн и/или отдельного БТС дополнительно непрерывно определяют параметры его взаимодействия с дорожным полотном и окружающей средой, по меньшей мере, такие как коэффициент сцепления, боковой ветер, величина кривизны траектории движения, угловая скорость дрифта колес, для чего регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту, формируемых импульсными датчиками сигналы о частотах вращения колес, передают их через линии сопряжения в блок обработки информации каждого БТС, в котором в режиме реального времени определяют значения физических переменных движения каждого БТС, таких как продольная скорость движения центра масс каждого БТС, средний угол поворота управляемых колес, и на основании сигналов о частотах вращения колес, скорости их изменения и настроечных параметров с помощью микроконтроллера с программным обеспечением вычисляют знак и величину угловой скорости дрифта как величину скорости заноса задних колес и/или сноса передних, сравнивают результаты расчета величин физических переменных движения, знаков и величин угловой скорости дрифта каждого БТС с граничными значениями, характеризующими критическое состояние каждого БТС, формируют на выходе блока обработки информации сигналы о приближении к границам критического режима возникновения дрифта колес, передают оперативную информацию по индикаторам опасных состояний и о приближении или превышении границ критического режима возникновения дрифта колес и оповещают через путевые центры управления и непосредственно по автоматической связи в колоннах передают на соседние БТС и через путевые центры управления в региональные центры управления ИТИ, которые во взаимодействии с путевыми ЦУ ИТИ по заданным программам производят коррекцию управления режимов движения каждого БТС путем передачи скорректированных команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС, обеспечивающие исключение отклонения положения БТС от заданной траектории движения, исключение явлений сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС и других нештатных ситуаций и состояний, предрасполагающих к ним.
Пространственное положение и параметры движения каждого БТС и/или каждой колонны БТС системой управления ИТИ, в соответствии с заявленным способом, могут контролироваться с помощью внешних датчиков интеллектуальной транспортной инфраструктуры автомобильной дороги, которые могут регистрировать идентификацию, прохождение мерных, например, мильных или километровых участков дороги, определять положение каждого БТС и/или БТС в составе колонн на их полосах движения согласно дорожной разметки и расстояние до других ближайших БТС и/или БТС в составе колонн.
Системы технического зрения БТС обычно не могут обеспечить проведение гарантированной и высокой надежности оценки окружающей обстановки, гарантированного распознавания дорожных знаков, разметки, светофоров, контроль пространственного положения, параметров движения каждого БТС и каждого БТС в составе колонны, расстояний между БТС, надежную и качественную идентификацию ТС, БТС, препятствий, людей и животных на дорогах и т.д. вследствие недостаточной надежности работы датчиков и систем технического зрения при движении БТС на всех эксплуатационных режимах - скоростных режимах движения, при разгонах, торможении, при езде на гравийных, песчаных и грунтовых дорогах, на мокром и заснеженном дорожном покрытии, при гололеде, в различных климатических условиях (при разных величинах давлений, температур, влажности окружающего воздуха, направлениях и скорости ветра, при наличии дождя, града, снега, инея, тумана, задымленности воздуха над дорогой). Недостатками применения систем технического зрения СУ БТС являются отказы в их работе вследствие вибрационных и ударных нагрузок при движении БТС, а также трудоемкость, сложность и высокая стоимость при обслуживании по сравнению со стационарным их использованием в ИТС.
Для надежной оценки окружающей обстановки, гарантированной и высокой надежности распознавания дорожных знаков, разметки, светофоров контроля пространственного положения, параметров движения каждого БТС и каждого БТС в составе колонны, расстояний между БТС и в ИТИ вдоль дорог и над ними в соответствии с известным из прототипа способом устанавливают собственные внешние путевые системы технического зрения, включающие, по меньшей мере, видеокамеры и радары, а также другие технические средства мониторинга и контроля дорожной обстановки, например, локальные и/или распределенные датчики положения и состояния движения на дорожной сети, которые в режиме реального времени производят гарантированную оценку окружающей обстановки и дорожных условий, сканирование, распознавание, регистрацию всех движущихся и неподвижных объектов, определяют параметры их положения и движения на дорогах и прилегающих к ним территориях по маршрутам движения каждого БТС и каждого БТС в составе колонны. На основании этих данных дополнительно контролируют путем сравнения результатов распознавания штатных систем БТС и оповещения от внешних систем распознавания и уточнения данных по результатам сравнения.
При реализации данного способа через путевые средства беспроводной связи соответствующего путевого центра управления передают данные о возникновении нештатной ситуации к региональному центру управления и после обработки от регионального центра управления получают информацию о маршруте, и через которые пользователи колонн БТС и/или отдельных БТС задают маршруты их движения с данными о пунктах отправления и прибытия, о промежуточных остановках, и передают перечисленные данные в региональный центр управления интеллектуальной транспортной инфраструктурой (РЦУ ИТИ), где их обрабатывают, рассчитывают окончательные оптимальные маршруты, составляют маршрутные карты и передают их полностью или порционно в путевые центры управления, которые передают команды, разрешающие каждому БТС и/или каждому БТС в составе колонны движение в автоматическом режиме по их маршруту в соответствии с их маршрутными картами.
С помощью путевого РЦУ ИТИ выполняют следующие действия:
- перед началом движения для каждого БТС и/или каждого БТС в составе колонны устанавливают или определяют имеющийся у них индивидуальный идентификационный код, согласно которому производят идентификацию каждого БТС, регистрацию его маршрута и начального пункта местоположения, а после начала движения выполняют мониторинг параметров движения каждого БТС на полосах движения согласно дорожной разметки, скорости движения, ускорений, торможений и их взаимного положения;
- определяют порядок движения и разрабатывают предварительные маршрутные карты для всех БТС, вновь вступающих в движение в составе колонн, и/или отдельных БТС или обрабатывают команды регионального центра управления, изменяющие их порядок движения по существующим маршрутным картам, на основании которого разрабатываются окончательные действующие маршрутные карты;
- контролируют состояние всей дорожной обстановки на всей сети автомобильных дорог путем анализа данных, поступающих от пользователей, собственных систем управления движением БТС и внешних путевых систем контроля, анализа и мониторинга дорожных условий ИТИ, производят анализ характеристик, по меньшей мере, таких, как маршрут движения и проводят мониторинг выполнения команд согласно каждой действующей маршрутной карте, тип и тактико-технические характеристики каждого БТС, его систем, узлов и агрегатов, вес, габариты, грузоподъемность, техническое состояние БТС и его агрегатов, а также, по меньшей мере, анализ данных о перевозимых грузах, их назначении, степени опасности, времени погрузки и доставки, и при анализе информации от внешних путевых систем контроля, анализе и мониторинге дорожных условий так же производят анализ, по меньшей мере, таких данных, как колебания и изменения суточных, погодных и иных климатических условий и их прогнозов в зонах автомобильных дорог по маршруту движения, параметры позиционирования каждого БТС, а также от путевых систем контроля, анализа и мониторинга дорожных условий производят формирование и анализ, по меньшей мере, таких данных о дороге, как ее ширина, пропускная способность в обоих направлениях, типы и состояние дорожного покрытия, наличие дорожных знаков, дорожной разметки, светофоров, условия и интенсивность движения транспортного потока, его состав разрешенные скорости движения, расстояния между БТС, ускорения и торможения каждого из БТС в составе колонн и/или отдельных БТС, а также других транспортных средств, возникновение аварийных ситуаций, проведение плановых или срочных строительно-дорожных работ;
- при этом на каждом участке дорожного полотна, подконтрольном соответствующему путевому центру управления сети автомобильных дорог, посредством локальных и/или распределенных датчиков состояния движения, расположенных вдоль дорог рассчитанного маршрута, контролируют состояние дорожной обстановки и условия движения транспортного потока, включая, по меньшей мере, данные о рельефе местности, интенсивности транспортного потока, его составе, позиционировании каждого БТС на полосах движения и оптимальном распределении на них БТС и/или БТС в составе колонн;
- по результатам контроля производят анализ и обработку перечисленных данных, передают их в региональный центр управления, в котором их обрабатывают и по результатам обработки которых формируют и корректируют маршруты движения, маршрутные карты и передают их и команды, разрешающие движение каждому БТС и/или каждому БТС в составе колонны в автоматическом режиме по их маршруту с обеспечением задаваемых маршрутными картами скоростных режимов движения, ускорений, торможений, дистанций между каждым из БТС в колонне и/или отдельных БТС, в путевые ЦУ ИТИ, причем при перегрузке отдельных дорог составляют для части колонн БТС и/или отдельных БТС уточненные маршрутные карты с обходными маршрутами по другим дорогам дорожной сети и соответствующие команды, разрешающие движение в автоматическом режиме для этой части БТС;
- далее в региональном центре управления ИТИ с заданной периодичностью с помощью дополнительных собственных внешних путевых систем технического зрения, включающих, по меньшей мере, видеокамеры и радары, установленные вдоль дорог и над ними, и технических средств мониторинга и контроля дорожных условий дополнительно в режиме реального времени производят сканирование, распознавание, регистрацию всех движущихся и неподвижных объектов и определяют параметры их положения и движения на дорогах и прилегающих к ним территориях по маршрутам их движения;
- так же в региональном ЦУ ИТИ дополнительно выполняют с заданной периодичностью и с учетом данных сканирования, распознавания и регистрации сбор, обработку, анализ и обновление баз данных о дорожных условиях, по меньшей мере, таких как временные дорожные ограничения, материалы и параметры дорожного полотна, наличие чрезвычайных ситуаций;
- далее с заданной периодичностью дополнительно осуществляют обновление баз данных по мониторингу состояния климатических и экологических условий внешней среды в зонах сети автомобильных дорог, сбор с помощью путевых штатных и дополнительных датчиков, установленных вдоль автомобильных дорог, над ними и в дорожном полотне, по меньшей мере, таких данных, как температура дорожного полотна, наличие снижающих прозрачность и видимость на дороге воздушных аэрозолей и атмосферных осадков, наличие на дорожном полотне сконденсировавшейся или замороженной влаги, содержание вредных веществ в воздухе, например, таких, как газообразные вещества, твердые или жидкостные аэрозоли;
- по результатам анализа и обработки перечисленных обновленных и дополненных данных в соответствии с заранее задаваемыми критериями безопасности дорожного движения определяют значения параметров движения каждого БТС, сравнивают их с граничными значениями, характеризующими критические их величины в отношении обеспечения безопасности движения каждого из БТС в составе колонн и/или отдельных БТС, и оперативно оповещают ТС, заинтересованные в информации о нештатных ситуациях или предрасположенности к ним, при необходимости, производят коррекцию маршрутов и/или режимов их движения;
- далее в региональном ЦУ ИТИ для подконтрольной ЦУ ИТИ сети автомобильных дорог формируют и передают команды управления в путевые центры управления, которые осуществляют управление движением каждого БТС в составе колонн и/или отдельных БТС путем передачи команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС в составе колонн и/или отдельных БТС.
- по результатам анализа и обработки перечисленных обновленных и дополненных данных в соответствии с заранее задаваемыми критериями опасности груза и маршрута определяют значения параметров движения каждого БТС, сравнивают их с граничными значениями, характеризующими критические их величины в отношении движения каждого из БТС в составе колонн и/или отдельных БТС, при необходимости оперативно оповещают ТС, заинтересованные в информации о нештатных ситуациях или предрасположенности к ним, производят коррекцию маршрутов и/или режимов их движения и, после выполнения всех перечисленных действий, в региональном ЦУ ИТИ для подконтрольной ЦУ ИТИ сети автомобильных дорог формируют и передают команды управления в путевые центры управления, которые осуществляют управление движением каждого БТС в составе колонн и/или отдельных БТС путем передачи команд управления непосредственно на их приводы управления, по меньшей мере, поворотом колес, тормозной системой и тяговой установкой, а также, при наличии, коробкой передач и сцеплением.
При реализации предлагаемого способа в каждом БТС в составе колонн и/или отдельного БТС дополнительно определяют угловую скорость дрифта колес, при котором регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту, формируемых импульсными датчиками сигналы о частотах вращения колес, передают их через линии сопряжения в блок обработки информации каждого БТС. В блоке обработки информации в режиме реального времени определяют значения физических переменных движения каждого БТС, таких как продольная скорость движения центра масс каждого БТС, средний угол поворота управляемых колес, угол поворота управляемых колес, скорости продольных скольжений колес, максимальные значения коэффициентов трения скольжения колес.
На основании сигналов о частотах вращения колес, скорости их изменения и настроечных параметров с помощью микроконтроллера с программным обеспечением вычисляют знак и величину угловой скорости дрифта как величину скорости заноса задних колес и/или сноса передних, сравнивают результаты расчета величин физических переменных движения, знаков и величин угловой скорости дрифта каждого БТС с граничными значениями, характеризующими критическое состояние каждого БТС, формируют на выходе блока обработки информации индикаторы опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также о приближении или превышении граничных значений скоростей дрифта колес.
Сформированные таким образом на выходе блока обработки информации индикаторы опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также о приближении или превышении граничных значений скоростей дрифта колес, передают в региональные центры управления ИТИ, которые во взаимодействии с путевыми ЦУ ИТИ по заданным программам производят коррекцию управления режимов движения каждого БТС путем передачи скорректированных команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС. Управление движением автоматически управляемых БТС в колонне и/или отдельных БТС с помощью интеллектуальной транспортной инфраструктуры (ИТИ) сети автомобильных дорог обеспечивает исключение отклонения положения каждого БТС от заданной траектории движения, и, тем самым, исключение явлений сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС. Определяют степень опасности нештатной ситуации и оперативно оповещают ТС, заинтересованные в информации о нештатных ситуациях или предрасположенности к ним.
Последовательность действий и математические вычисления проводят с помощью микроконтроллера с соответствующим программным обеспечением, позволяющим реализовать эту последовательность действий способа, которая дана в алгоритме, представленном на прилагаемом рисунке.
Технические результаты состоят в динамической стабилизации безопасной скорости каждого БТС при движении по маршруту на виражах, за счет чего предотвращается снос передних и занос задних колес БТС и в упрощении используемых средств для получения информации о динамическом состоянии каждого БТС и соответственно в повышении надежности безопасной работы на нем из-за простоты конструкции для реализации предлагаемого способа, включающей 4 стандартных датчика частот вращения колес БТС, электрически связанных с микроконтроллерным устройством обработки информации, который включает блок настроечных параметров оценки физических параметров и блок анализа параметров 4-х датчиков частот вращения колес, блок сравнения с критическими значениями физических параметров этих датчиков, блок анализа опасных состояний и выбора оптимального варианта предотвращения дрифта колес БТС и определения последовательности устранения опасных нештатных ситуаций и блок формирования и передачи информации в региональный центр управления ИТИ.
Относительная простота конструкции системы контроля и предотвращения дрифта колес БТС для реализации предлагаемого способа, приводит к резкому повышению надежности и эффективности управления движением каждого БТС с помощью СУ ИТИ с одной стороны и с другой стороны к низкой стоимости используемых технических средств и их низкому энергопотреблению, обусловленному отсутствием введения дополнительных физических датчиков первичной информации, необходимых для решения задачи. Минимальная работоспособная конфигурация датчиков частот вращения колес достигается в случае наличия хотя бы одного датчика по каждому борту БТС. Предложенный способ дает возможность достоверного прогнозирования дрифта колес БТС в составе колонн и/или отдельных БТС до его возникновения. Что повышает безопасность как их эксплуатации, так и других БТС и ТС потенциально могущих попасть в аварийную нештатную ситуацию, оперативное и своевременное оповещение которых позволяет избежать их попадание в указанные ситуации.
Заявленное изобретение поясняется чертежами.
На Фиг. 1 представлен алгоритм определения угловой скорости дрифта колес БТС, по результатам которого вычислительные блоки определения угловой скорости дрифта колес системы управления движением БТС формируют и передают в региональные центры управления ИТИ данные об индикаторах опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также об индикаторах приближения или превышения граничных значений скоростей дрифта колес. В соответствии с предлагаемым способом данный алгоритм реализует следующую последовательность действий:
1 - ввод данных о частотах вращения колес;
2 - вычисление продольных скоростей вращения колес;
3 - вычисление продольной скорости центра масс и разности скоростей вращения пар колес;
4 - вычисление угла поворота управляемых колес;
5 - вычисление граничных скоростей сноса, заноса колес БТС;
6 - вычисление граничных значений углов поворота управляемых колес;
7 - вычисление угловой частоты дрифта колес;
8 - индикация опасных состояний;
9 - вывод данных из вычислительных блоков СУД БТС об индикаторах в региональные центры управления ИТИ для управления движением каждого БТС в составе колонн и/или отдельных БТС.
На Фиг. 2 схематично представлена система мониторинга состояния БТС и двустороннего оперативного обмена информацией о БТС, позволяющая реализовать все указанные в формуле действия способа с БТС.
Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог осуществляется согласно алгоритму, показанному на Фиг. 1, при реализации последовательности действий способа посредством системы двусторонней оперативной связи БТС с другими БТС в колонне и через путевые центры в региональные центры управления ИТИ данные об индикаторах опасных состояний, следующим описанным ниже образом.
Пример системы индивидуального мониторинга состояния и движения БТС и его двустороннего оперативного обмена информацией о БТС и об опасных состояниях окружающей среды с интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог представлен на Фиг. 2, а способ ее работы описан ниже.
Система двустороннего оперативного обмена информацией о БТС и об опасных состояниях окружающей среды с интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог содержит (см. Фиг. 2) датчики 1, 2, 3, 4 частот вращения соответствующих колес БТС, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством 6 сопряжения, микроконтроллерное устройство 5 обработки информации, включает блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес БТС, блок 8 анализа параметров датчиков 1, 2, 3, 4, блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 вращения колес БТС, блок 10 формирования сигналов, характеризующих состояние и характер движения БТС, блок 11 формирования сигналов для управляющих воздействий на органы 12 управления БТС: рулевое колесо 13, тормоза 14, акселератор 15, для индикатора опасных состояний и для подачи на устройство вывода графической информации для водителя, причем предпочтительно, чтобы в системе блоки 8 анализа, 9 сравнения, 10 формирования сигналов и 11 формирования управляющих воздействий выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес БТС, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес БТС, блока 10 формирования сигналов, характеризующих состояние и характер движения БТС, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления БТС, при этом система дополнительно снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, а устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров дополнительно снабжено блоком 17 оперативного двустороннего оперативного обмена информацией о БТС и результатов мониторинга сети автомобильных дорог об опасных состояниях окружающей среды с интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог и блоком 18 индикации опасных состояний БТС, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту БТС соответственно 1 или 2, 3 или 4, а также блоком 19 выбора режима двустороннего оперативного обмена информацией о БТС и об опасных состояниях окружающей среды, а система снабжена блоком 20 анализа опасных состояний, выбора оптимального варианта предотвращения дрифта колес БТС и опасности опрокидывания, определения последовательности устранения опасных ситуаций и оптимального воздействия на органы 12 управления БТС при помощи, по меньшей мере, исполнительного механизма 21 управления рулевым колесом 13, исполнительного механизма 22 управления тормозами 14 и исполнительного механизма 23 управления акселератором 15 (см. Фиг. 2).
Предложенная система, предназначенная для реализации действий способа, работает следующим образом.
Сигналы, формируемые импульсными датчиками 1, 2, 3, 4 частот вращения каждого колеса каждого БТС, регистрируют и передают их через блок сопряжения в блок обработки информации.
При движении БТС импульсные датчики 1, 2, 3, 4 частот вращения каждого колеса каждого БТС вырабатывают сигналы о частоте вращения соответствующих колес БТС, а так как они электрически связаны с микроконтроллерным устройством 5, то эти сигналы посредством линий связи с устройством 6 сопряжения постоянно поступают в микроконтроллерное устройство 5 обработки информации, которое включает программный блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес БТС, которое сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики, у которых возникли неисправности в виде пропадания сигнала на ограниченном временном интервале. При этом автоматически показания такого датчика исключаются из дальнейшего анализа (см. Фиг. 2).
В микроконтроллерном устройстве 5 обработки информации определяют значения физических переменных и сравнивают с фактическими значениями, характеризующими критическое состояние БТС. В блоке обработки информации в режиме реального времени формируют оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, максимальных значений коэффициентов трения скольжения колес.
При этом в микроконтроллерном устройстве 5 обработки информации программный блок 8 анализа параметров датчиков 1, 2, 3, 4 по установленной на нем программе сравнивает сигналы от датчиков 1, 2, 3, 4 частот вращения колес БТС, между собой и получает данные характеризующие состояние и характер движения БТС, так например, если датчики 1, 2 правого борта имеют пропорционально большие частоты вращения, чем частоты датчиков 3, 4 частот вращения колес БТС левого борта, то устанавливается, что БТС поворачивает направо, такое состояние определяется углом поворота управляемых колес, соответствующего углу поворота рулевого колеса 13. Например, если датчики 1, 2 правого борта имеют не пропорциональное изменение частот вращения, то устанавливается, что колеса передней и/или задней оси попадают в дрифт (см. Фигуру).
На основании полученных реальных сигналов микроконтроллерное устройство 5 обработки информации системы формирует по широко известным алгоритмам зависимостей между параметрами частот вращения колес, на основании их математической обработки и на основании настроечных параметров оценки физических параметров, характеризующих состояние БТС, в том числе оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, топовых значений коэффициентов трения скольжения колес, а также граничных значений скоростей сноса передних, заноса задних колес, граничных значений углов поворота управляемых колес, соответствующих сносу передних и заносу задних колес, и оценки угловой скорости дрифта колес БТС. Затем на основании сигналов о частотах вращения колес, и настроечных параметров с помощью микроконтроллера с программным обеспечением формируют на выходе блока обработки информации индикаторы опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также о приближении или превышении граничных значений индикаторов опасных состояний, например, скоростей дрифта колес, в том числе данных индикаторов опасных состояний об окружающей среде. Очевидно, что указанные настроечные и расчетные параметры могут оперативно меняться в процессе движения БТС и их конкретные значения не могут быть предметом подробного анализа и разъяснения во всех возможных аспектах движения БТС на маршруте и по этой причине подробно не рассматриваются в данном предложении.
На основании полученных реальных сигналов микроконтроллерное устройство 5 обработки информации системы формирует по широко известным алгоритмам зависимостей между параметрами частот вращения колес, на основании их математической обработки и на основании настроечных параметров оценки физических параметров, характеризующих состояние БТС, в том числе оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, топовых значений коэффициентов трения скольжения колес, а также граничных скоростей сноса передних и заноса задних колес, граничных значений углов поворота управляемых колес, соответствующих сносу передних и заносу задних колес и оценки угловой скорости дрифта колес БТС. Очевидно, что указанные настроечные и расчетные параметры могут оперативно меняться в процессе движения БТС и их конкретные значения не могут быть предметом подробного анализа и разъяснения во всех возможных аспектах движения БТС на маршруте и по этой причине подробно не рассматриваются в данном предложении.
После этого выявленный сигнал опасного состояния поступает в программный блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 вращения колес БТС, где происходит сравнение с критическими значениями физических параметров датчиков 1, 2, 3, 4, устанавливается вид дрифта, соответствующий сносу передних 1, 3 и/или заносу задних 2, 4 колес и по оценке угловой скорости дрифта колес БТС устанавливается степень опасности этого явления.
Далее программный блок 10 формирования сигналов, характеризующих состояние и характер движения БТС и программный блок 11 формируют сигналы для управляющих воздействий и команду на последовательность и интенсивность управляющих воздействий на органы 12 управления БТС, а также указанными блоками вырабатываются сигналы для индикатора опасных состояний и для подачи на устройство вывода графической информации для водителя,
При этом система дополнительно снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров. Такое дополнение позволяет вводить дополнительные данные в блок 7 настроечных параметров, например при программировании системы адаптивного круиз контроля в соответствии с особенностями предполагаемого маршрута, например, с указанием, где расположены по маршруту движения опасные участки дороги, например такие как, крутые повороты или виражи с отрицательным уклоном, то есть виражи, в которых уклон направлен не классически в сторону наименьшего внутреннего радиуса, а наоборот - в сторону большего внешнего радиуса. В Правилах Дорожного Движения нет предупредительного знака отрицательного уклона виража, а визуально его очень трудно определить. Снижение силы сцепления с дорожным полотном при таком вираже может быть значительным (см. Фиг. 2).
Устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, дополнительно снабжено блоком 17 двустороннего оперативного обмена информацией о БТС и об опасных состояниях окружающей среды с интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог. Такое дополнение устройства 16 позволяет оперативно изменять настроечную информацию об опасных состояниях, при этом настройки могут меняться, например, при резком и/или внезапном изменении погодных или дорожных условий. Такими изменениями могут быть внезапно начавшийся дождь, снежный шквал, выезд на участок с новым жидким битумно-мастичным гравийным покрытием и т.п. (см. Фиг. 2). Такие данные об индикаторах опасных состояний, например, скоростей дрифта колес соседнего БТС, или данных об индикаторах опасных состояний об окружающей среде могут поступать как от ближайшего ТС в колонне, так и через средства связи путевых центров управления интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог. Оперативность оповещения и поступление команд управления на изменение режима движения БТС позволяет устранить предпосылки к возникновению нештатных ситуаций и повысить безопасность движения.
Дополнительное снабжение устройства 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров блоком 17 двустороннего оперативного обмена информацией о БТС и об опасных состояниях окружающей среды с интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог и блоком 18 индикации опасных состояний, которые совместно выполнены с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту позволяет точно и правильно оценить характер движения БТС при минимуме информации, а также снабжение системы блоком 19 выбора режима двустороннего оперативного обмена информацией о БТС и об опасных состояниях окружающей среды позволяет выбрать необходимую информацию и правильно проинформировать водителя БТС и непосредственно или через путевой ЦУ ИТИ окружающие ТС об возникающей опасной нештатной ситуации.
Снабжение системы блоком 20 анализа опасных состояний и выбора оптимального варианта и определения последовательности устранения опасных ситуаций и воздействия на органы 12 управления БТС на основании выполнения анализа в микроконтроллерном устройстве 5 обработки информации с исполнением в соответствии с заложенными в нем программами согласно исполнению функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес БТС, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес БТС, блока 10 формирования сигналов, характеризующих состояние и характер движения БТС, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления БТС позволяет эффективно оценить опасность ситуации и сформировать последовательность управляющих воздействий на органы 12 управления БТС, также эффективно выбрать оптимальный вариант предотвращения дрифта колес БТС и определить необходимую последовательность действий для устранения опасных ситуаций путем необходимого и достаточного воздействия на органы 12 управления БТС при относительно быстро меняющихся условиях окружающей среды, при которых выбирается оптимальная последовательность для процесса управления и воздействия на органы 12 управления БТС при помощи соответствующего исполнительного механизма, например исполнительного механизма 21 управления рулевым колесом 13, или исполнительного механизма 22 управления тормозами 14 или исполнительного механизма 23 управления акселератором 15 (см. Фиг. 2).
Далее индикаторы опасных состояний передают в региональные центры управления ИТИ, которые во взаимодействии с путевыми ЦУ ИТИ по заданным программам производят коррекцию управления режимов движения каждого БТС путем передачи скорректированных команд управления непосредственно на рулевые приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС. Управление движением автоматически управляемых БТС в колонне и/или отдельных БТС с помощью интеллектуальной транспортной инфраструктуры (ИТИ) сети автомобильных дорог обеспечивает исключение отклонения положения каждого БТС от заданной траектории движения, и, тем самым, исключение явлений сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС.
При этом очевидно, что начало движения по маршруту под управлением последующего путевого или регионально центра управления должно быть согласовано с окончанием управления предыдущего путевого или регионально центра управления и их взаимным согласованием передачи управления и выполнения действий, согласно общей дорожной карты или ее части.
Управление движением по маршрутам и контроль положения на дорожном полотне каждого БТС и/или каждой колонны БТС согласно каждой маршрутной карты с помощью дополнительных средств ИТИ проводят посредством локальных и/или распределенных датчиков положения и состояния движения на дорожной сети путем сравнения, контроля и определения положения относительно других БТС и/или колонн БТС и пространственного позиционирования на полосе движения, а определение параметров и динамику движения каждого БТС и/или каждой колонны БТС выполняют также путем контроля динамического изменения в режиме реального времени пространственного положения и расположения каждого БТС и/или каждой колонны БТС на каждой полосе движения дорожного полотна.
Предложенная последовательность действий и средства для ее осуществления позволяют повысить точность и эффективность управления движением каждого БТС и/или БТС в составе колонны в транспортном потоке и снизить как первичные, так и текущие затраты на это путем постоянного и полного контроля режимов движения каждого БТС при оптимальном распределении потоков информации от региональных центров управления к БТС через путевые центры управления, являющиеся основными промежуточными базами хранения информации о порядке управления каждым из БТС в составе колонн и/или отдельных БТС согласно маршрутных карт регионального центра управления ИТИ, а также позволяет упростить процесс управления дорожным движением в целом.
Технический результат, характеризующий повышение безопасности, надежности и эффективности работы предлагаемого способа, а также оптимальность осуществляемой последовательности действий, заключается в выполнении периодичной или непрерывной идентификации коэффициента сцепления колес при движении каждого БТС в составе колонны или отдельного БТС с дорожным покрытием за счет технических средств каждого БТС в дополнение к проводимому измерению и мониторингу условий и параметров дорожного движения с помощью средств ИТИ, что позволяет:
- обеспечить динамическую стабилизацию курсовой устойчивости и безопасной скорости каждого БТС на виражах и, тем самым, исключить явления сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС при движении с изменяемыми даже на отдельных участках дорог типов дорожного покрытия, например, бетонного, асфальтобетонного, грунтового, песчаного, его параметров и состояния, в условиях переменных температур и влажности окружающего воздуха и дорожного покрытия, наличия на последнем посторонних веществ, например, грязи, грунта, масла, воды, снега, льда и их переменных свойств, при изменении давления в шине и величин ее давления на дорожное полотно, с учетом места установки шины на каждом БТС, ее размерности, таких параметров шин, как материал, рисунок протектора, степень износа, наличие шипов, с учетом температуры и влажности наружной поверхности шины, направления ее движения, частоты вращения колеса, распределения массы каждого БТС по осям;
- обеспечить динамическую стабилизацию безопасной скорости каждого БТС на виражах, за счет чего предотвращается снос передних и занос задних колес каждого БТС;
- повысить безопасность дорожного движения за счет исключения дорожно-транспортных происшествий путем динамической стабилизации курсовой устойчивости и безопасной скорости на виражах каждого БТС в составе колонны или отдельного БТС.
Другие достигаемые технические результаты при реализации предлагаемого способа:
- постоянный мониторинг и оперативная передача дополнительной информации в СУ ИТИ о динамическом состоянии каждого БТС, необходимой для повышения эффективности и надежности управления движением каждого БТС в составе колонны или отдельного БТС и безопасности их движения;
- повышение надежности работы технических средств, используемых в конструкции для реализации способа, вследствие относительной простоты их конструкции;
- повышение надежности передачи информации о нештатных ситуациях в колонне, например, при недостаточной мощности или других затруднениях с передачей ее в путевые центры ИТИ, путем ретранслирования ее через более мощные средства других БТС или спутниковые средства связи;
- низкая стоимость технических средств, используемых в конструкции для реализации способа и низкое энергопотребление, обусловленные отсутствием введения дополнительных физических датчиков первичной информации, необходимых для решения задачи с помощью средств ИТИ;
- эксплуатационная надежность реализации способа, поскольку минимальная работоспособная конфигурация датчиков частот вращения колес БТС обеспечивается даже при работе одного датчика устройства для реализации способа по каждому борту БТС, например, с колесной формулой 4×2 и 4×4;
- возможность достоверного прогнозирования и исключения дрифта колес каждого БТС до возникновения у него сноса передних и заноса задних колес.
Это возможно, так как передача команд управления и контроля происходит в виде набора простых сигналов управления. Команды по управлению движением привязаны к датчикам СУ ИТИ и их пространственному положению, из которого вытекают процессы их выполнения во времени, соответственно которые связаны со скоростью движения, которая представляет собой дифференциальную функцию по времени изменения положения и соответственно перемещения БТС относительно них. По этой причине оптимизация распределения массива управляющих команд на уровне путевого центра управления ИТИ к каждому БТС в транспортном потоке, участвующих в дорожном движении, определяется: во-первых плотностью расположения путевых средств связи и ранее указанными объективными возможностями передачи команд, необходимых и достаточных для управления всем транспортным потоком на конкретной дороге, и во-вторых сложностью дорожной обстановки, определяемой интенсивностью движения и внешними условиями окружающей среды.
Оптимальность последовательности действий предложенного способа определяется и минимизацией маневров БТС на дороге, так как в региональном центре управления все маршруты БТС и/или БТС в составе колонн взаимно согласуются при формировании и передачи команд управления централизованно со стороны ЦУ ИТИ в режиме взаимного движения с исключением возможности ДТП вследствие исключения дрифта колес.
Выполнение всех необходимых и достаточных действий для получения новых технических результатов с помощью известных материальных средств над известными материальными средствами при реализации предложенного способа управления движением отдельных беспилотных транспортных средств и/или колонн БТС интеллектуальной транспортной инфраструктурой автомобильной дороги позволяет получить все указанные новые технические результаты. При этом можно установить следующие причинно-следственные связи между новыми техническими результатами и произведенными действиями способа.
При необходимости вследствие изменения климатических, сезонных, суточных и т.д. условий, например, при ухудшении видимости из-за тумана, снега или дождя простыми известными датчиками можно легко сгенерировать необходимый сигнал об этом, получаемый через путевой центр управления в региональном центре ИТИ для анализа и оценки необходимости изменения маршрутов движения и маршрутных карт. При этом также маршрутные карты не должны кардинально изменяться, так как такие экстраординарные погодные явления, как торнадо, град и т.п., требующие кардинального изменения параметров движения беспилотных транспортных средств из-за возможных катастрофических последствий, бывают редко, а обычные погодные явления не требуют значительного перераспределения транспорта по сети дорог, так как очевидно, что в региональном ЦУ ИТИ распределение маршрутов движения и расчет распределения транспортных потоков по дорогам региона должен производиться с запасом, учитывающим возможность его изменения и колебаний по статистически определенным вероятностям изменения и краткосрочному прогнозу. Запас также должен распределяться равномерно по сети дорог, так как перегрузка отдельных направлений сети будет повышать вероятность аварийных ситуаций на них.
При необходимости, вследствие изменения климатических, сезонных, суточных и т.д. условий, например, при ухудшении видимости из-за тумана, снега или дождя, простыми известными датчиками можно легко сгенерировать необходимый сигнал об этом, получаемый через путевой центр управления в региональном центре ИТИ для анализа и оценки необходимости изменения маршрутов движения и маршрутных карт. При этом также маршрутные карты не должны кардинально изменяться, так как такие экстраординарные погодные явления, как торнадо, град и т.п., требующие кардинального изменения параметров движения беспилотных транспортных средств из-за возможных катастрофических последствий, бывают редко, а обычные погодные явления не требуют значительного перераспределения транспорта по сети дорог, так как очевидно, что в региональном ЦУ ИТИ распределение маршрутов движения и расчет распределения транспортных потоков по дорогам региона должен производиться с запасом, учитывающим возможность его изменения и колебаний по статистически определенным вероятностям изменения. Запас также должен распределяться равномерно по сети дорог, так как перегрузка отдельных направлений сети будет повышать вероятность аварийных ситуаций на них.
Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог, в котором через путевые средства беспроводной связи соответствующего путевого центра управления передают к региональному центру управления и после обработки от регионального центра управления получают информацию о маршруте, и через которые пользователи колонн БТС и/или отдельных БТС задают маршруты их движения с данными о пунктах отправления и прибытия, о промежуточных остановках, и передают перечисленные данные в региональный центр управления интеллектуальной транспортной инфраструктурой, где их обрабатывают, рассчитывают окончательные оптимальные маршруты, составляют маршрутные карты и передают их полностью или порционно в путевые центры управления, которые передают команды, разрешающие каждому БТС и/или каждому БТС в составе колонны движение в автоматическом режиме по их маршруту в соответствии с их маршрутными картами.
При этом распределение массива маршрутных карт и их частей для исполнения путевыми ЦУ ИТИ, согласно расположению выполняемых частей маршрутов колонн БТС и/или отдельных БТС позволяет оптимизировать распределение и выполнение действий по управлению БТС путевыми ЦУ ИТИ, так как последние не должны иметь значительные объемы долговременной и оперативной памяти, большие, чем необходимый объем баз данных для всех маршрутных карт подконтрольных маршрутов и быть большей производительности, чем потребное максимально возможное число действий для управления потоком БТС, соответствующих максимальной пропускной способности конкретной дороги. А увеличение последней возможно только при реконструкции дорожного полотна и соответствующим изменении средств контроля и управления движением. Очевидно, что оптимальность объема оперативной и долговременной памяти ЦУ ИТИ в основном определяется условиями передачи управляющей информации на приводы управления отдельных БТС и/или БТС в составе колонн, то есть только условиями необходимой плотности расположения средств связи и возможностями устойчивой передачи ими необходимого объема команд и других управляющих действий. В основном это определяется рельефом местности, природными (таких как северное сияние и магнитные бури) и техногенными условиями возникновения помех.
Оптимальность распределения и обработки информации о маршрутах движения колонн БТС и/или отдельных БТС определяется назначением и режимами работы регионального и путевых центров управления.
С помощью путевого ЦУ ИТИ в режиме реального времени выполняют следующие действия:
- Перед началом движения для каждого БТС и/или каждого БТС в составе колонны устанавливают или определяют имеющийся у них индивидуальный идентификационный код, согласно которому производят идентификацию каждого БТС, регистрацию его маршрута и начального пункта местоположения, а после начала движения выполняют мониторинг параметров движения каждого БТС на полосах движения согласно дорожной разметки, скорости движения, ускорений, торможений и их взаимного положения;
- Определяют порядок движения и разрабатывают предварительные маршрутные карты для всех БТС, вновь вступающих в движение в составе колонн, и/или отдельных БТС или обрабатывают команды регионального центра управления, изменяющие их порядок движения по существующим маршрутным картам;
- Идентификационный код каждого БТС и/или каждого БТС в составе колонны может быть составлен из оригинального WIN кода с добавлением другой связанной или кодирующей информации, например, кода сектора движения по сети дорог или связи с интеллектуальной транспортной инфраструктурой автомобильной дороги. Для простейшего шифрования индивидуальной информации о БТС в сигнале идентификации можно использовать паразитные вставки, не имеющие отношения к указанным видам информации, но внесенные в соответствии с видом самого сигнала идентификационного кода по заданной соответствующим сервером программе;
- В процессе прохождения участков маршрута БТС и каждого БТС в составе колонны с помощью системы управления ИТИ контролируют их местоположение и корректируют отклонение от маршрута каждого БТС и/или БТС в составе каждой колонны, нарушение графика движения по маршруту, а по результатам выполнения заданной маршрутной картой программы движения, включающей временной и пространственный график движения, производят корректировку маршрута движения для согласованного движения всех БТС, участвующих в дорожном движении;
- Контролируют состояние всей дорожной обстановки на всей сети автомобильных дорог путем анализа данных, поступающих от пользователей, собственных систем управления движением БТС и внешних путевых систем контроля, анализа и мониторинга дорожных условий ИТИ, производят анализ характеристик, по меньшей мере, таких, как маршрут движения и его выполнение, тип и тактико-технические характеристики каждого БТС, его систем, узлов и агрегатов, вес, габариты, грузоподъемность, техническое состояние БТС и его агрегатов, а также, по меньшей мере, анализ данных о перевозимых грузах, их назначении, степени опасности, времени погрузки и доставки, и при анализе информации от внешних путевых систем контроля, анализе и мониторинге дорожных условий так же производят анализ, по меньшей мере, таких данных, как колебания и изменения суточных, погодных и иных климатических условий и их прогнозов в зонах автомобильных дорог по маршруту движения, параметры позиционирования каждого БТС, а также от путевых систем контроля, анализа и мониторинга дорожных условий производят формирование и анализ, по меньшей мере, таких данных о дороге, как ее ширина, пропускная способность в обоих направлениях, типы и состояние дорожного покрытия, наличие дорожных знаков, дорожной разметки, светофоров, условия и интенсивность движения транспортного потока, его состав разрешенные скорости движения, расстояния между БТС, ускорения и торможения каждого из БТС в составе колонн и/или отдельных БТС, а также других транспортных средств, возникновение аварийных ситуаций, проведение плановых или срочных строительно-дорожных работ;
- На каждом участке дорожного полотна, подконтрольном соответствующему путевому центру управления сети автомобильных дорог, посредством локальных и/или распределенных датчиков состояния движения, расположенных вдоль дорог рассчитанного маршрута, контролируют состояние дорожной обстановки и условия движения транспортного потока, включая, по меньшей мере, данные о рельефе местности, интенсивности транспортного потока, его составе, позиционировании каждого БТС на полосах движения и оптимальном распределении на них БТС и/или БТС в составе колонн;
- При реализации способа центр управления ИТИ с помощью собственных внешних путевых систем технического зрения сети автомобильных дорог, включающих, по меньшей мере, видеокамеры и радары, установленные вдоль дорог и над ними, и технических средств контроля дорожных условий дополнительно производят сканирование, распознавание, регистрацию всех движущихся и неподвижных объектов и определяют параметры их положения и движения на дорогах и прилегающих к ним территориях по предполагаемым маршрутам их движения с заданной периодичностью. Путевые системы технического зрения сети автомобильных дорог, по сравнению с известными системами технического зрения, устанавливаемыми на транспортных средствах, позволяют более точно распознавать и определять позиционирование всех транспортных средств на дорожном полотне, скорости их движения, ускорения и торможения, расстояния между транспортными средствами, а также обнаруживать все препятствия, например, не только неподвижные транспортные средства, но и мотоциклистов, велосипедистов, людей, животных и других всевозможных и более мелких предметов на дорогах. Контроль пространственного положения и параметров движения каждого БТС и/или БТС в составе колонны, а также обнаружение препятствий на их полосах движения, как и всего транспортного потока БТС на дорожном полотне по частям и в целом, выполняемый в режиме реального времени, позволяет повысить безопасность, надежность и оперативность реагирования на опасные ситуации на дороге;
- Выполняют с учетом данных сканирования сбор, обработку, анализ и обновление баз данных о дорожных условиях с заданной периодичностью, по меньшей мере, таких как временные дорожные ограничения, материал и свойства дорожного полотна, о наличии и указаниях регулировщика дорожного движения, о чрезвычайных ситуациях. Сбор, обработка, анализ и обновление этих баз данных о дорожных условиях необходимы при выполнении процессов анализа дорожной обстановки, формирования и передачи команд управления движением БТС и/или БТС в составе колонн в реальных условиях эксплуатации, поскольку такие данные оказывают свое влияние на безопасность дорожного движения;
- Дополнительно осуществляют обновление баз данных по дополнительному мониторингу состояния климатических и экологических условий внешней среды в зонах дорог с помощью путевых собственных и дополнительных датчиков, установленных вдоль автомобильных дорог, над ними и в дорожном полотне, по меньшей мере, таких как данных, как температура дорожного полотна и атмосферные осадки, наличие на дорожном полотне сконденсировавшейся или замороженной влаги, содержание вредных веществ в воздухе, в виде таких веществ, как газообразные, твердые или жидкостные аэрозоли. Дополнительный мониторинг состояния климатических условий внешней среды в зонах дорог с помощью путевых собственных и дополнительных датчиков ИТИ, установленных вдоль дорог, над ними и в дорожном полотне, и учет данных мониторинга при формировании команд управления движением каждого БТС и/или БТС в составе колонн именно в зонах контакта шин с дорожным полотном, а также экологических условий в воздухе в зонах обитания пассажиров в БТС является обязательным и наиболее точным в сравнении с аналогичным мониторингом, проводимым либо в системах управления движением транспортных средств, любо удаленными стационарными системами мониторинга параметров внешней среды. Так, например, точный анализ температуры дорожного полотна, наличие на нем сконденсировавшейся или замороженной влаги, снега, гололеда, атмосферных осадков позволяет исключить аварии транспортных средств из-за потери сцепления шин с дорожным полотном, а мониторинг газообразных, твердых или жидкостных аэрозолей, например, наиболее опасных для здоровья озона, твердых частиц, оксидов азота, оксида углерода позволяет исключить их вредное воздействие на здоровье и даже смертельные исходы для пассажиров во время нахождения в БТС;
- С помощью системы управления ИТИ движением БТС и/или БТС в составе каждой колонны от контрольных телевизионных или иных изображений автоматически дополнительно получают информацию о дорожной обстановке и обрабатывают данные результатов сканирования и анализа дорожной обстановки, пространственного положения и параметров движения каждого БТС и БТС в составе каждой колонны БТС на их полосах движения - проводят путем контроля динамического изменения в режиме реального времени пространственного положения с заданной периодичностью в режиме реального времени производят обновление перечисленных выше баз данных, обрабатывают данные по задаваемой заранее программе, по результатам обработки определяют значения параметров перечисленных данных, сравнивают их с граничными значениями, характеризующими критические их величины в отношении движения каждого из БТС в составе колонн и/или отдельных БТС, при необходимости, производят коррекцию маршрутов и/или режимов их движения и, после выполнения всех перечисленных действий, в региональном ЦУ ИТИ для подконтрольной ЦУ ИТИ сети автомобильных дорог формируют и передают команды управления в путевые центры управления, которые осуществляют управление движением каждого БТС в составе колонн и/или отдельных БТС путем передачи команд управления непосредственно на их приводы управления, по меньшей мере, поворотом колес, тормозной системой и тяговой установкой, а также, при наличии, коробкой передач и сцеплением.
- Оптимальность распределения потока каждого БТС и БТС в составе колонн по дорожной сети, формируемая через центральный сервер регионального центра управления ИТИ, может зависеть от пропускной способности соответствующей дороги, загруженности сети дорог, состояния и несущей способности ее дорожного полотна в режиме реального времени по погодным и т.п. условиям.
Очевидно, что скорости, ускорения и другие динамические показатели изменения положения каждого БТС и/или БТС в составе колонн БТС во времени и в пространстве являются производными от времени и пространственного положения каждого БТС и БТС в составе колонн и легко вычисляются по изменению их положения относительно изменения координат, заданных пространственным образом, по реальному текущему значению времени действия. Такие изменения могут быть отражены в командах управления согласно измененным маршрутным картам, передаваемым из регионального центра управления через путевые центры управления на каждое АУ БТС. А по ним соответственно можно определить или задать заранее управляющие воздействия на приводы управления движением БТС, например, такие, как изменение положение органа управления тормозом или тяговой установкой при движении в гору и с горы.
Движение по маршруту и все соответствующие команды управления согласно маршрутным картам каждого из БТС в составе колонн БТС и/или отдельных БТС по заданным маршрутам, разработанным в региональном центре управления интеллектуальной транспортной инфраструктурой для подконтрольной ЦУ ИТИ сети автомобильных дорог и переданными через путевые центры управления, все команды управления выполняются под полным постоянным контролем согласно маршрутной карте ЦУ ИТИ, по меньшей мере, для приводов управления, таких как рулевое управление, тормозная система и привод управления тяговой установкой, кроме этого могут подаваться команды управления на другие системы, например, такие как системы вентиляции и кондиционирования, световой и звуковой сигнализации, очистки стекол и т.п.
В способе управления с помощью ЦУ ИТИ дополнительно производят за счет использования собственных средств наблюдения и контроля ЦУ ИТИ сбор, обработку поступающих данных в соответствии с выше приведенным перечнем на дорогах, примыкающих к дорогам маршрута движения каждого из БТС в составе колонн и/или отдельных БТС, и производят дополнительную коррекцию маршрутов и/или режимов их движения, по результатам которых формируют порядок совместного движения и передают уточненные управляющие команды непосредственно на приводы управления движением каждого из БТС в составе колонн и/или отдельных БТС.
При такой последовательности выполнения действий можно достичь гармоничного взаимно согласованного, оптимального по времени и безопасного движения БТС в составе колонн и/или отдельных БТС на всей сети дорог, подконтрольном региональному ЦУ ИТИ.
В способе с помощью ЦУ ИТИ на длинных маршрутах движения производят весь цикл управления движением, во всех управляющих действиях под полным постоянным контролем путевых центров управления согласно маршрутной карте регионального ЦУ ИТИ, по меньшей мере, для приводов управления, таких как рулевое управление, тормозная система и привод управления тяговой установкой каждого из БТС в составе колонн и/или отдельных БТС через путевые и/или региональные центры управления в сети дорог в пределах сегментов территории обслуживания каждого из них.
В соответствии с заявляемым способом управления движением БТС и/или БТС в составе колонн с помощью интеллектуальной транспортной инфраструктуры автомобильной дороги работа системы управления движением внутри колонн БТС, реализующая предлагаемый способ управления, в общем виде построена на выполнении общего требования обеспечения устойчивого управления движением БТС и БТС в составе колонн интеллектуальной транспортной инфраструктурой сети автомобильных дорог посредством передачи управляющих команд на привод управления движением каждого БТС и/или БТС в составе колонн через беспроводные каналы связи путевых центров управления от центрального сервера регионального центра управления ИТИ.
Для повышения надежности и эффективности управления движением БТС с помощью СУ ИТИ при реализации предлагаемого способа в каждом БТС в составе колонн и/или отдельного БТС дополнительно определяют угловую скорость дрифта колес, при котором регистрируют и обрабатывают сигналы, по меньшей мере, одного из колес по каждому борту, формируемых импульсными датчиками сигналы о частотах вращения колес, передают их через линии сопряжения в блок обработки информации каждого БТС. В блоке обработки информации в режиме реального времени определяют значения физических переменных движения каждого БТС, таких как продольная скорость движения центра масс каждого БТС, средний угол поворота управляемых колес, угол поворота управляемых колес, скорости продольных скольжений колес, максимальные значения коэффициентов трения скольжения колес.
На основании сигналов о частотах вращения колес, скорости их изменения и настроечных параметров с помощью микроконтроллера с программным обеспечением вычисляют знак и величину угловой скорости дрифта как величину скорости заноса задних колес и/или сноса передних, сравнивают результаты расчета величин физических переменных движения, знаков и величин угловой скорости дрифта каждого БТС с граничными значениями, характеризующими критическое состояние каждого БТС, формируют на выходе блока обработки информации индикаторы опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также о приближении или превышении граничных значений скоростей дрифта колес.
Сформированные таким образом на выходе блока обработки информации индикаторы опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также о приближении или превышении граничных значений скоростей дрифта колес, передают в региональные центры управления ИТИ, которые во взаимодействии с путевыми ЦУ ИТИ по заданным программам производят коррекцию управления режимов движения каждого БТС путем передачи скорректированных команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС. Управление движением автоматически управляемых БТС в колонне и/или отдельных БТС с помощью интеллектуальной транспортной инфраструктуры (ИТИ) сети автомобильных дорог обеспечивает исключение отклонения положения каждого БТС от заданной траектории движения, и, тем самым, исключение явлений сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС.
Технические результаты состоят в оперативной и своевременной динамической стабилизации безопасной скорости каждого БТС при движении по маршруту на виражах, за счет чего предотвращается снос передних и занос задних колес БТС и в упрощении используемых средств для получения информации о динамическом состоянии каждого БТС и соответственно в повышении надежности безопасной работы на нем из-за простоты конструкции для реализации предлагаемого способа, включающей, например, 4 стандартных датчика частот вращения колес БТС, электрически связанных с микроконтроллерным устройством обработки информации, который включает блок 7 настроечных параметров оценки физических параметров и блок анализа параметров 4-х датчиков частот вращения колес, блок сравнения с критическими значениями физических параметров этих датчиков, блок анализа опасных состояний и выбора оптимального варианта предотвращения дрифта колес БТС и определения последовательности устранения опасных ситуаций и блок формирования и передачи информации в региональный центр управления ИТИ.
Относительная простота конструкции системы контроля и предотвращения дрифта колес БТС для реализации предлагаемого способа, приводит к существенно большему повышению надежности и эффективности управления движением БТС с помощью СУ ИТИ с одной стороны и с другой стороны к низкой стоимости используемых технических средств и их низкому энергопотреблению, обусловленному отсутствием введения дополнительных физических датчиков первичной информации, необходимых для решения задачи. Минимальная работоспособная конфигурация датчиков частот вращения колес достигается в случае наличия хотя бы одного датчика по каждому борту БТС. Предложенный способ дает возможность достоверного прогнозирования дрифта колес БТС в составе колонн и/или отдельных БТС до его возникновения.
Способ определения угловой скорости дрифта колес БТС осуществляется следующим образом.
Сигналы, формируемые импульсными датчиками частот вращения колес каждого БТС, регистрируют и передают их через блок сопряжения в блок обработки информации.
В блоке обработки информации определяют значения физических переменных и сравнивают с фактическими значениями, характеризующими критическое состояние БТС. В блоке обработки информации в режиме реального времени формируют оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, максимальных значений коэффициентов трения скольжения колес, а также граничных значений скоростей сноса передних, заноса задних колес, граничных значений углов поворота управляемых колес, соответствующих сносу передних и заносу задних колес, и оценки угловой скорости дрифта колес БТС. Затем на основании сигналов о частотах вращения колес, и настроечных параметров с помощью микроконтроллера с программным обеспечением формируют на выходе блока обработки информации индикаторы опасных состояний о физических параметрах, характеризующих состояние каждого БТС, а также о приближении или превышении граничных значений скоростей дрифта колес. Далее индикаторы опасных состояний передают в региональные центры управления ИТИ, которые во взаимодействии с путевыми ЦУ ИТИ по заданным программам производят коррекцию управления режимов движения каждого БТС путем передачи скорректированных команд управления непосредственно на приводы управления поворотом колес, тормозной системы и тяговой установки, а также, при наличии, коробки передач и сцепления каждого БТС. Управление движением автоматически управляемых БТС в колонне и/или отдельных БТС с помощью интеллектуальной транспортной инфраструктуры (ИТИ) сети автомобильных дорог обеспечивает исключение отклонения положения каждого БТС от заданной траектории движения, и, тем самым, исключение явлений сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС.
В соответствии с заявляемым способом управления движением по маршрутам БТС и БТС в составе колонн интеллектуальной транспортной инфраструктурой сети автомобильных дорог могут быть достигнуты технические результаты не только при выполнении всех действий способа, но и при использовании его части.
Преимуществами настоящего изобретения по сравнению с аналогами, то есть существующими техническими решениями, является исключение предпосылок дорожно-транспортных происшествий в результате оперативного и своевременного устранения сноса и заноса колес, а также возможности опрокидываний беспилотных БТС в реальных условиях эксплуатации транспортных средств.
По предлагаемому способу можно выделить следующие новые технические результаты:
1. Снижение дорожно-транспортных происшествий в результате оперативного и своевременного исключения сноса и заноса колес, а также возможности опрокидываний каждого БТС и передачи данных оповещения о нештатной ситуации другим БТС в составе колонн и/или отдельных БТС в реальных условиях эксплуатации транспортных средств.
2. Повышение надежности и эффективности работы предлагаемого способа, а также оптимальность осуществляемой последовательности действий, заключающаяся в выполнении периодичной или непрерывной идентификации коэффициента сцепления колес при движении каждого БТС в составе колонны или отдельного БТС с дорожным покрытием за счет технических средств каждого БТС в дополнение к проводимому измерению и мониторингу условий и параметров дорожного движения с помощью средств ИТИ и оперативной передачи информации о его снижении другим БТС, что позволяет:
- обеспечить динамическую стабилизацию курсовой устойчивости и безопасной скорости каждого БТС на виражах и, тем самым, исключить явления сноса, заноса, опрокидывания каждого БТС в составе колонн и/или отдельных БТС при движении с изменяемыми даже на отдельных участках дорог типов дорожного покрытия, например, бетонного, асфальто-бетонного, грунтового, песчаного, его параметров и состояния, в условиях переменных температур и влажности окружающего воздуха и дорожного покрытия, наличия на последнем воды, снега, льда и их переменных свойств, при изменении давления в шине и величин ее давления на дорожное полотно, с учетом места установки шины на каждом БТС, ее размерности, таких параметров шин, как материал, рисунок протектора, степень износа, наличие шипов, с учетом температуры и влажности наружной поверхности шины, направления ее движения, частоты вращения колеса, распределения массы каждого БТС по осям;
- обеспечить динамическую стабилизацию безопасной скорости каждого БТС на виражах, за счет чего предотвращается снос передних и занос задних колес каждого БТС;
- повысить безопасность дорожного движения за счет исключения дорожно-транспортных происшествий путем динамической стабилизации курсовой устойчивости и безопасной скорости на виражах каждого БТС в составе колонны или отдельного БТС;
- повышение надежности работы технических средств, используемых в конструкции для реализации способа, вследствие относительной простоты их конструкции;
- низкая стоимость технических средств, используемых в конструкции для реализации способа и низкое энергопотребление, обусловленные отсутствием введения дополнительных физических датчиков первичной информации, необходимых для решения задачи с помощью средств ИТИ;
- эксплуатационная надежность реализации способа, поскольку минимальная работоспособная конфигурация датчиков частот вращения колес БТС обеспечивается даже при работе одного датчика устройства для реализации способа по каждому борту БТС, например, с колесной формулой 4×2 и 4×4;
- возможность достоверного прогнозирования и исключения дрифта колес каждого БТС до возникновения у него сноса передних и заноса задних колес.
В целом в предлагаемом изобретении устранены основные недостатки известных технических решений путем исключения дрифта колес каждого БТС до возникновения у него сноса передних и заноса задних колес при управлении движением беспилотных транспортных средств и/или БТС в составе колонн БТС с помощью интеллектуальной транспортной инфраструктуры автомобильной дороги. В предлагаемом изобретении обеспечивается существенное повышение надежности и эффективности работы всего процесса транспортных перевозок, значительное повышение производительности, качества, дорожной и экологической безопасности, а также - снижение удельных затрат на эксплуатационные материалы и другие текущие затраты для всего процесса грузопассажирских перевозок путем повышения надежности и качества управления движением БТС и/или БТС в составе колонн.
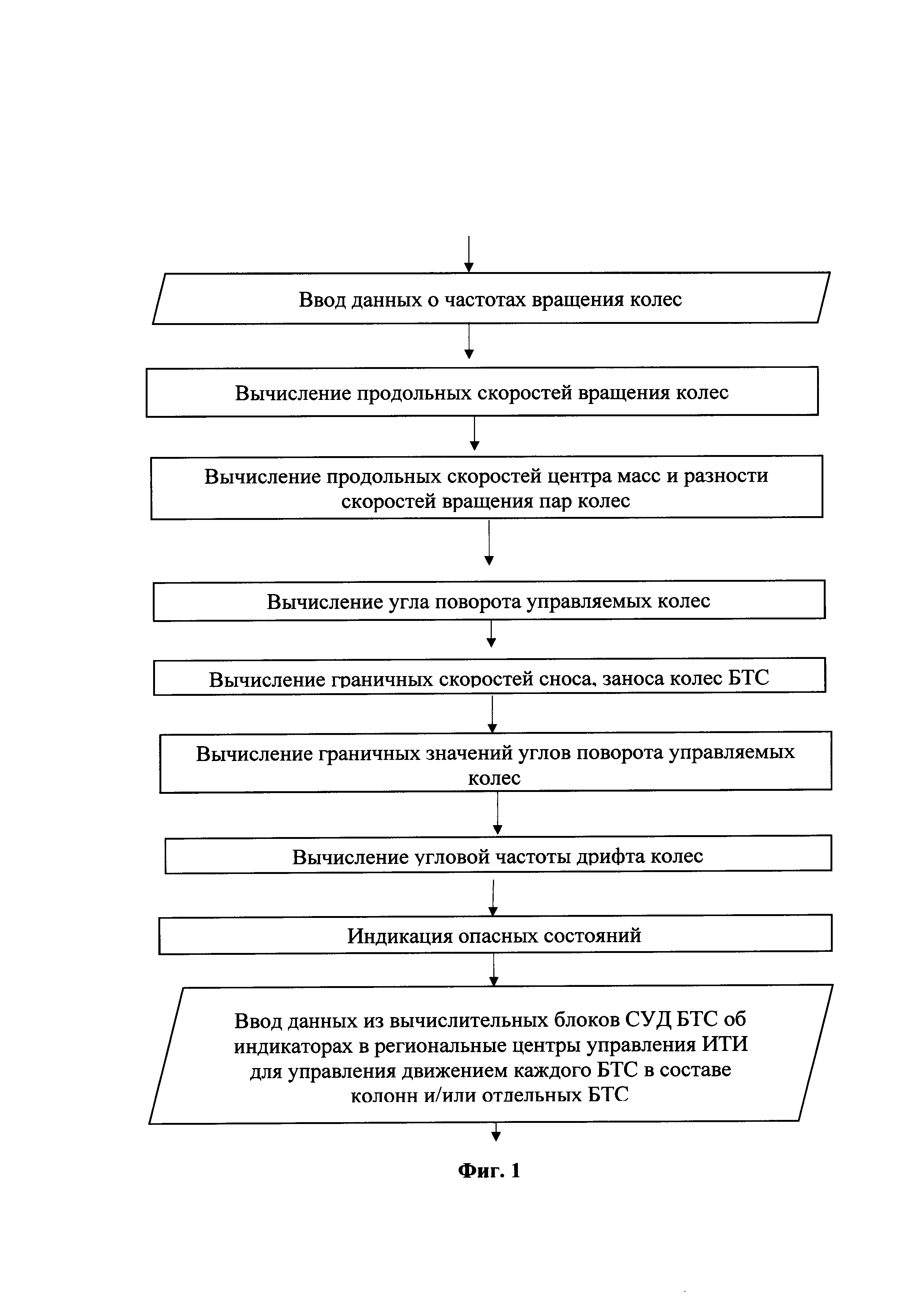
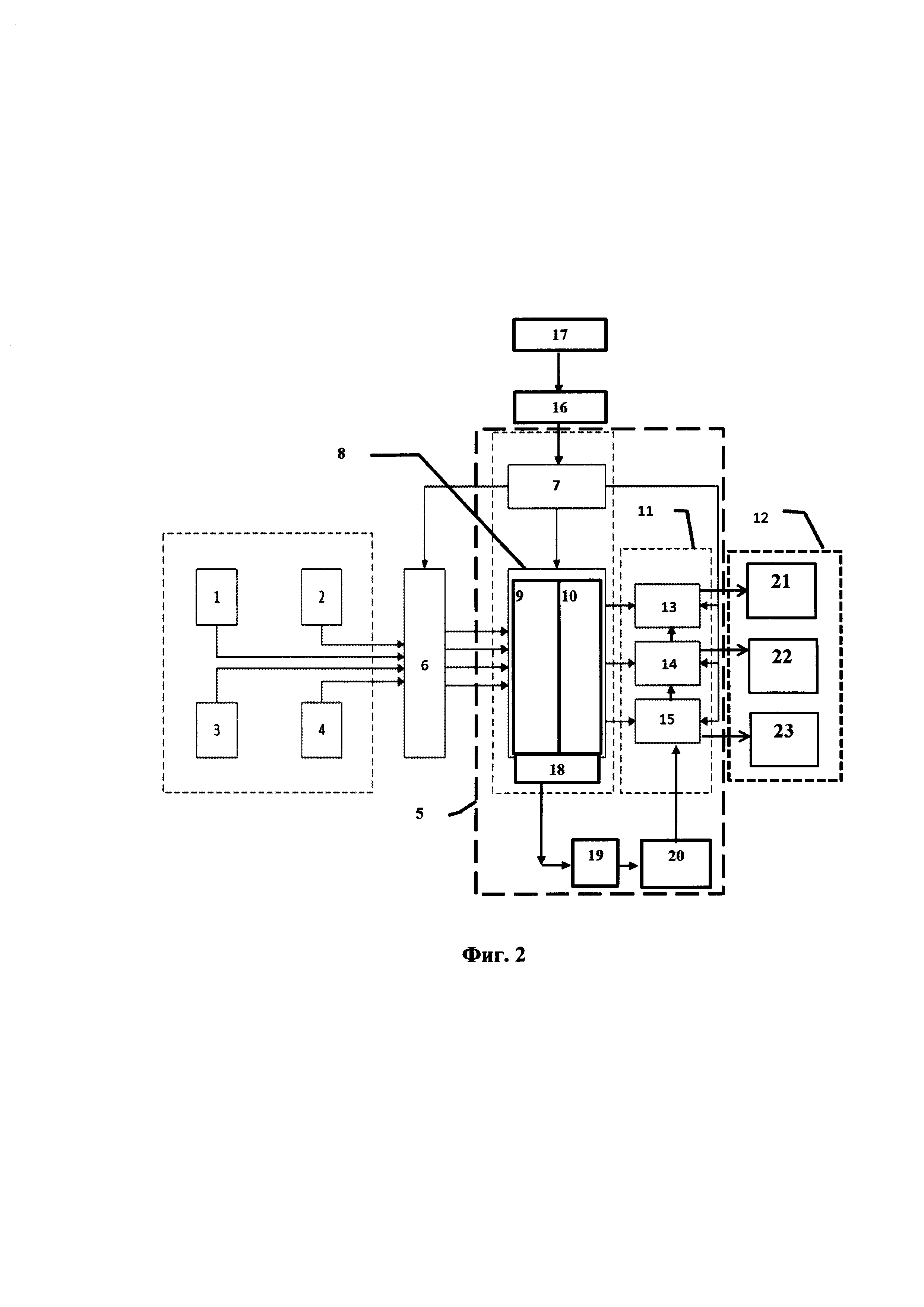
Сцепляющий узел трансмиссии транспортного средства
Двухкамерный топливный бак
Способ трассировки маршрута движения автоматического транспортного средства
Узел сцеплений трансмиссии транспортного средства
Способ управления автоматическим транспортным средством
Двойное многодисковое сцепление трансмиссии транспортного средства
Семиступенчатая коробка передач транспортного средства
Двойное сцепление
Устройство электрогидравлического управления двойным сцеплением и коробкой передач
Двойное сцепление трансмиссии транспортного средства
Межосевой дифференциал полноприводного автомобиля
Раздаточная коробка
Раздаточная коробка полноприводного автомобиля
Полноприводный грузовой автомобиль
Грузовой автомобиль со всеми ведущими колесами
Способ предотвращения аварийного перегрева шин и тормозов автомобиля и система для его осуществления
Способ сжигания пылевидного топлива
Устройство для сжигания пылевидного топлива
Устройство для сжигания пылевидного топлива
Способ управления комбинированной силовой установкой гибридного транспортного средства

