Результат интеллектуальной деятельности: МУЛЬТИСЕНСОРНАЯ КАМЕРА
Вид РИД
Изобретение
Изобретение касается мультисенсорной камеры согласно ограничительной части п.1 формулы изобретения.
В области профессионального видеоконтроля больших контролируемых областей существуют высокие требования к разрешению деталей регистрируемых видеоданных. Применяемые для этого видеосистемы имеют множество камер или, соответственно, видеокамер, которые выполнены специально для видеоконтроля самых разных контролируемых областей.
Норма DIN EN 62676–4 задает, в частности, глобальный стандарт проектирования и целевого согласования таких видеосистем для контроля. Этот стандарт содержит, в частности, общую классификацию требуемого разрешения применительно к удаленности отображаемого объекта от камеры в единицах измерения «пикселей/метр». Указанные категории этой классификации следующие:
– «наблюдение» (ниже 125 пикселей/метр);
– «распознавание известных людей» (от 125 пикселей/метр и выше);
– «идентификация неизвестного человека» (от 250 пикселей/метр и выше).
При данной удаленности отображаемых объектов от камеры повышение разрешения деталей по законам геометрической оптики может достигаться путем повышения плотности пикселей сенсора изображения, а именно, количество пикселей на квадратный миллиметр, или путем повышения фокусного расстояния объектива. Но есть также альтернативная возможность конструировать камеры, имеющие повышенную разрешающую способность деталей, что приводит к строительству так называемых мультисенсорных камер.
Головка такой мультисенсорной камеры имеет множество блоков сенсоров изображений , при этом каждый один блок сенсоров изображений включает в себя объектив и принадлежащий ему сенсор изображений, которые предпочтительно образуют один конструктивный узел. Головка мультисенсорной камеры сканирует своими блоками сенсоров изображений различные, в общем слегка перекрывающиеся, угловые области пространства контролируемой области. Таким образом, такие мультисенсорные камеры дают то преимущество, что при относительно высоком разрешении применительно к месту контролируемой области (единица измерения: пикселей/метр при удаленности x) на основании совокупности содержаний изображений всех блоков сенсоров изображений они могут регистрировать пространственные углы большей величины.
Разные производители уже предлагают такие мультисенсорные камеры, которые генерируют содержание их изображений с помощью нескольких блоков сенсоров изображений сенсоров изображений .
Из DE 10 2011 103 378 B3 известно, например, устройство контроля, имеющее несколько камер, причем эти камеры выполнены в виде мультисенсорных камер. Блоки мультисенсорных камер реализованы по так называемой «технологии мультифокусной камеры». Для этого блоки сенсоров изображений блоков мультисенсорных камер, которые регистрируют подлежащую контролю ситуацию при значительно отличающихся расстояниях до объекта, оснащены объективами различных фокусных расстояний. Лежащими в основе, частично очень различными масштабами отображения отдельных блоков сенсоров изображений, а также сильно отличающимися применительно к разным пространственным углам плотностями пикселей, отнесенными к пространственному углу в единицах измерения «пикселей/угол», может гарантироваться минимальное разрешение применительно к удаленности объекта от камеры в единицах измерения «пикселей/метр». При наличии этого свойства может планироваться видеоконтроль соответственно разрешению, заданному в норме DIN EN 62676–4, и обещаться возможность распознавания людей при заданной удаленности. DE 10 2011 103 378 B3 раскрывает, в частности, способ представления содержаний изображений блоков сенсоров изображений , которые, соответствуя геометрии сенсорной системы, создаются из частично очень отличающихся масштабов отображения (фокусные расстояния объективов) и результирующих из них, применительно к пространственному углу, сильно отличающимся плотностей пикселей, при этом на мониторе могут представляться общее изображение и любые детальные виды для режима Live (реального времени) и синхронизированного режима Play–Back (воспроизведения).
Также желательно иметь возможность контролировать внутренние помещения посредством только небольшого количества камер. Для этого часто находят применение камеры, установленные на потолке подлежащего контролю внутреннего помещения, которые могут записывать горизонтальную зону видимости 360° вокруг перпендикулярной оси проекции смонтированной на потолке камеры на пол. Такие 360°–камеры могут также иметь уже несколько блоков сенсора изображения, посредством которых регистрируются несколько участков изображения или областей пространства, в сумме дающих изображение 360°.
Из US 2016/0191813 A1 известна, например, мультисенсорная камера, включающая в себя несколько блоков сенсоров изображений , которая выполнена для потолочного монтажа. Камера включает в себя четыре блока сенсоров изображений , которые размещены в куполообразном стеклянном корпусе, причем стеклянный корпус присоединяется к кольцевому основному корпусу, в котором помещены другие конструктивные элементы камеры и который выполнен для потолочного монтажа. В смонтированном состоянии куполообразный стеклянный корпус, вмещающий в себя блоки сенсоров изображений , расположен под основным корпусом и вместе с тем на расстоянии от потолка помещения. Вследствие существующего расстояния до потолка помещения имеющиеся в представленном примере осуществления четыре блока сенсоров изображений камеры расположены друг относительно друга таким образом, что их объективы указывают друг от друга, и поэтому их области регистрации изображений ориентированы от средней или, соответственно, продольной оси камеры наружу, и причем, не перекрещиваясь. С помощью этих четырех блоков сенсоров изображений возможен контроль помещения в горизонтальной зоне видимости 360°, при этом с помощью каждого одного блока сенсора изображения может регистрироваться горизонтальная зона видимости прибл. 90°. Однако недостатком при этом является, что находящаяся непосредственно под камерой область пола может только частично регистрироваться посредством имеющихся блоков сенсоров изображений , ориентированных каждый своей продольной осью наискосок наружу. Чтобы сделать возможной регистрацию горизонтальной зоны видимости 360°, блоки сенсоров изображений или, соответственно, их объективы у смонтированной на потолке камеры или, соответственно, потолочной камеры смонтированы каждый под потолком и на расстоянии от потолка в куполообразном стеклянном корпусе, чтобы обеспечить свободную видимость подлежащих регистрации областей помещения от продольной оси камеры наружу. При этом недостатком является невозможность монтажа такой мультисенсорной камеры заподлицо с потолком.
Аналогичные, выполненные для потолочного монтажа камеры, включающие в себя несколько сенсоров изображений, известны, например, из CN203069959U или CN201639666U, которые имеют, в частности, дополнительные блоки сенсоров изображений , с помощью которых может дополнительно регистрироваться область помещения непосредственно под расположенной на потолке камерой. И здесь блоки сенсоров изображений расположены внутри корпуса камеры под потолком таким образом, что их области регистрации распространяются радиально от продольной оси камеры наружу, т.е. не перекрещиваются в области корпуса камеры. Недостатком и здесь является невозможность монтажа таких камер заподлицо с потолком.
Исходя из этого, в основе изобретения лежит задача, предложить мультисенсорную камеру вышеназванного вида, которая может предпочтительно встраиваться в потолок здания заподлицо с поверхностью и делает возможной регистрацию горизонтальной зоны видимости 360°. Задача решается, исходя из признаков ограничительной части п.1 формулы изобретения, с помощью его отличительных признаков.
Существенный аспект предлагаемой изобретением мультисенсорной камеры видится в том, что блоки сенсоров изображений концентрически распределены вокруг продольной оси камеры и расположены внутри корпуса таким образом, что объективы блоков сенсоров изображений ориентированы к продольной оси камеры или обращены от продольной оси камеры, при этом предусмотрен по меньшей мере один другой блок сенсоров изображений , продольная ось сенсора которого проходит параллельно продольной оси камеры и имеет объектив «рыбий глаз» (Fish–Eye). Особенно предпочтительно с помощью блока сенсора изображения, имеющего объектив «рыбий глаз», может создаваться обзорное видеоизображение, при этом кольцеобразно расположенные вокруг продольной оси камеры блоки сенсоров изображений предназначены для создания детальных видеоизображений. Для этого блоки сенсоров изображений имеют, например, различные разрешения. При этом особенно предпочтительно посредством предлагаемой изобретением мультисенсорной камеры отдельные области помещения могут регистрироваться посредством по меньшей мере двух блоков сенсоров изображений с различными разрешениями, и при представлении записанного видеоизображения на блоке монитора осуществляться переключение между обзорным видеоизображением и отдельными детальными видеоизображениями, чтобы тем самым делать возможным «масштабирование» отдельных пространственных угловых областей видеоизображения 360° с повышенным разрешением.
В одном из вариантов осуществления изобретения блоки сенсора изображения расположены, будучи концентрически распределены вокруг продольной оси камеры и над дном корпуса, а именно, таким образом, что объективы блоков сенсоров изображений ориентированы к продольной оси камеры. Особенно предпочтительно в этом варианте осуществления блоки сенсоров изображений расположены относительно продольной оси камеры полностью внутри корпуса, встраиваемого в потолок заподлицо с поверхностью, и ориентированы каждый своим объективом в направлении продольной оси камеры. Область регистрации каждого блока сенсора изображения распространяется сначала по внутреннему пространству корпуса, отверстию для регистрации изображений или, соответственно, оптически прозрачной, плоской защитной пластине наружу, т.е. области регистрации блоков сенсоров изображений перекрещиваются в области камеры, а именно, уже внутри корпуса, и при этом особенно предпочтительно делают возможным встраивание камеры в потолок помещения заподлицо с поверхностью. Таким образом, помещенные в корпус блоки сенсоров изображений ориентированы навстречу друг другу, а именно, область регистрации одного блока сенсора изображения проходит под располагающимся в корпусе напротив блоком сенсора изображения и, таким образом, проходит мимо него.
В одном из предпочтительных вариантов осуществления продольные оси сенсоров блоков сенсоров изображений составляют каждая острый угол с продольной осью камеры, при этом угол установки блоков сенсоров изображений относительно продольной оси камеры составляет, напр., от 15° до 80°, предпочтительно от 35° до 65°.
Также предпочтительно дно корпуса имеет отверстие для регистрации изображений, которое может закрываться посредством оптически прозрачной, плоской и предпочтительно съемной защитной пластиной. Отверстие для регистрации изображений открывает ось оптической видимости из внутреннего пространства корпуса в подлежащее контролю помещение и по своему диаметру соответственно адаптировано к концентрическому расположению или, соответственно, количеству и/или углу установки блоков сенсоров изображений.
Блоки сенсоров изображений расположены также предпочтительно в проходящей перпендикулярно к продольной оси камеры плоскости монтажа, причем плоскость монтажа проходит параллельно и на расстоянии от дна корпуса или, соответственно, защитной пластины корпуса. В частности, блоки сенсоров изображений расположены в корпусе наискосок друг к другу таким образом, что их продольные оси сенсоров и продольная ось камеры пересекаются в общей виртуальной точке пересечения вне корпуса. При этом относительно продольной оси камеры получается симметричное, в частности центрально–симметричное расположение блоков сенсоров изображений для обеспечения видеоконтроля на протяжении горизонтальной области регистрации 360°.
Также предпочтительно блоки сенсоров изображений расположены в корпусе, будучи кольцеобразно распределены вокруг продольной оси камеры, и находятся предпочтительно каждый на одном и том же радиальном расстоянии от продольной оси камеры. Чтобы просто и без затруднений обеспечить описанное расположение внутри корпуса, в одном из вариантов осуществления предусмотрены, например, удерживающие средства для помещения блоков сенсоров изображений, которые куполообразно открываются в направлении отверстия для регистрации изображений. Они могут, например, вместе с блоками сенсоров изображений образовывать сменный модуль, который упрощает изготовление и/или техническое обслуживание мультисенсорной камеры.
В одном из предпочтительных вариантов осуществления предусмотрен по меньшей мере один дополнительный блок сенсора изображения, продольная ось сенсора которого проходит параллельно продольной оси камеры или совпадает с ней. Этот блок сенсора изображения делает возможной регистрацию области помещения непосредственно под мультисенсорной камерой. Особенно предпочтительно предусмотрены, например, по меньшей мере четыре блока сенсоров изображений и по меньшей мере один другой блок сенсора изображения.
Также предпочтительно указывающие своими объективами наискосок к продольной оси камеры блоки сенсоров изображений расположены в проходящей параллельно и на расстоянии от дна корпуса или, соответственно, от защитной пластины корпуса первой плоскости монтажа, в отличие от чего по меньшей мере один другой блок сенсора изображения расположен в ориентированной параллельно первой плоскости монтажа второй плоскости монтажа. При наличии двух других блоков сенсоров изображений они могут быть расположены также во второй и/или третьей плоскости монтажа, которые проходят каждая параллельно первой плоскости монтажа.
Однако, разумеется, что также четыре, шесть или восемь блоков сенсора изображения могут быть расположены внутри корпуса наискосок к продольной оси камеры и будучи концентрически распределены вокруг продольной оси камеры, в отличие от чего в корпусе может быть расположен по меньшей мере один другой блок сенсора изображения, продольная ось сенсора которого совпадает с продольной осью камеры, и в дне корпуса может быть помещен по меньшей мере еще один другой блок сенсора изображения, продольная ось сенсора которого проходит параллельно продольной оси камеры. Посредством описанного расположения блоков сенсоров изображений возможен видеоконтроль на протяжении горизонтальной области регистрации 360°.
Также предпочтительно корпус выполнен для встраивания дном корпуса в потолок здания заподлицо с поверхностью. Дно корпуса, в частности благодаря своему исполнению, делает возможным такое крепление на потолке здания заподлицо с поверхностью, в частности при проведенной через отверстие в потолке здания камере.
В одном из предпочтительных вариантов осуществления блоки сенсоров изображений имеют объективы, имеющие одни и те же или различные фокусные расстояния.
Также предпочтительно блоки сенсоров изображений и/или другие блоки сенсоров изображений выполнены для регистрации цифровых отдельных изображений с высоким разрешением.
Вследствие предлагаемого изобретением расположения блоков сенсора изображения внутри корпуса оно особенно предпочтительно имеет области регистрации, которые перекрещиваются в области корпуса, в частности в области внутреннего пространства корпуса. При применении по меньшей мере одного другого блока сенсора изображения перекрещиваются также области регистрации блоков сенсоров изображений и по меньшей мере одного из других блоков сенсоров изображений.
Усовершенствования, преимущества и возможности применения изобретения вытекают из последующего описания примеров осуществления и из фигур. При этом все описанные и/или графически представленные признаки сами по себе или в любой комбинации принципиально являются предметом изобретения, независимо от их формулировки в пунктах формулы изобретения или обратной ссылки на их. Содержание пунктов формулы изобретения также делается составной частью описания.
Далее изобретение поясняется подробнее с помощью фигур на примерах осуществления. Показано:
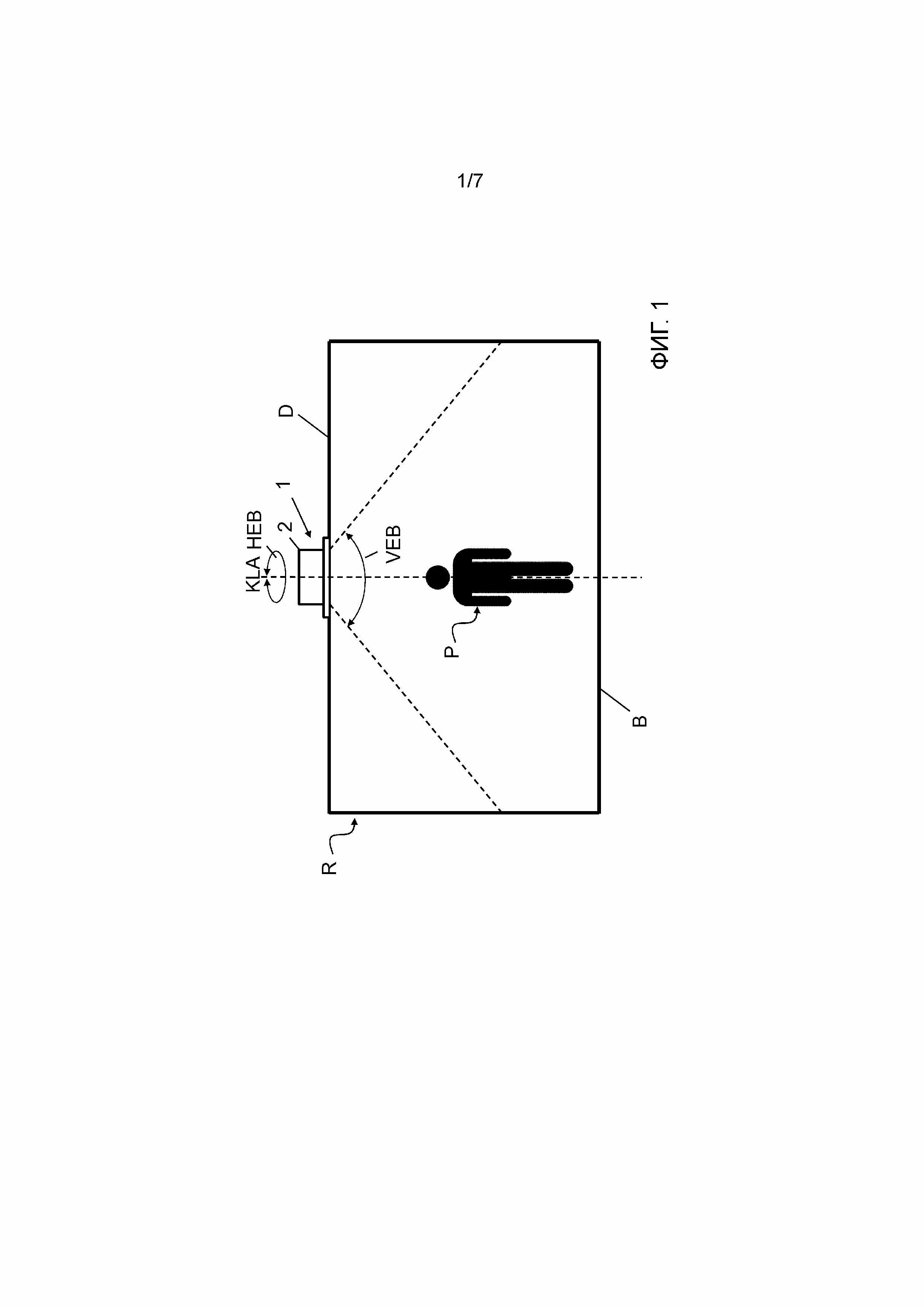
фиг.1: схематичный вид сбоку предлагаемой изобретением мультисенсорной камеры для видеоконтроля помещения, встроенной заподлицо с потолком в помещении;
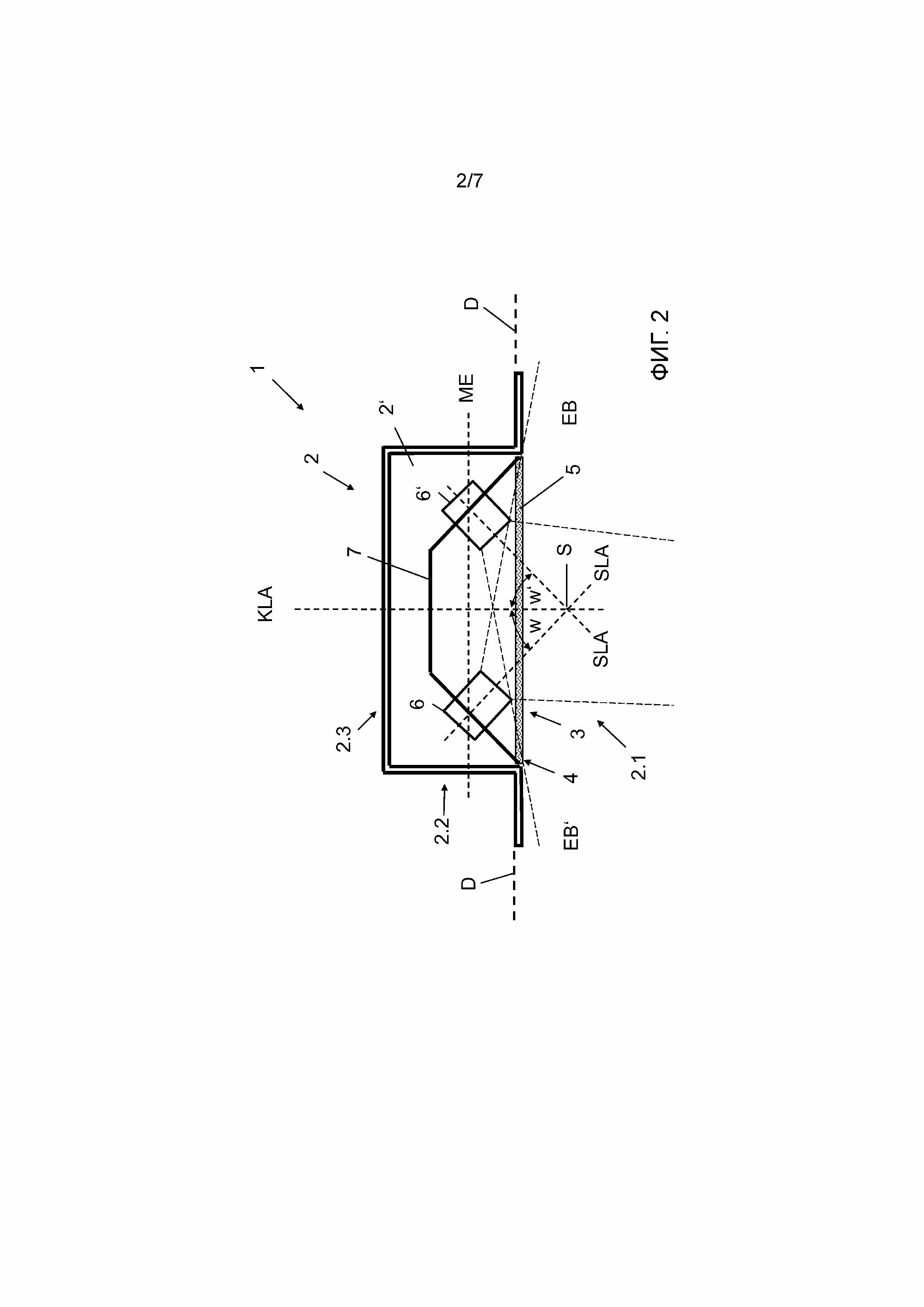
фиг.2: схематичное изображение сечения предлагаемой изобретением мультисенсорной камеры, встроенной в потолок помещения заподлицо с поверхностью;
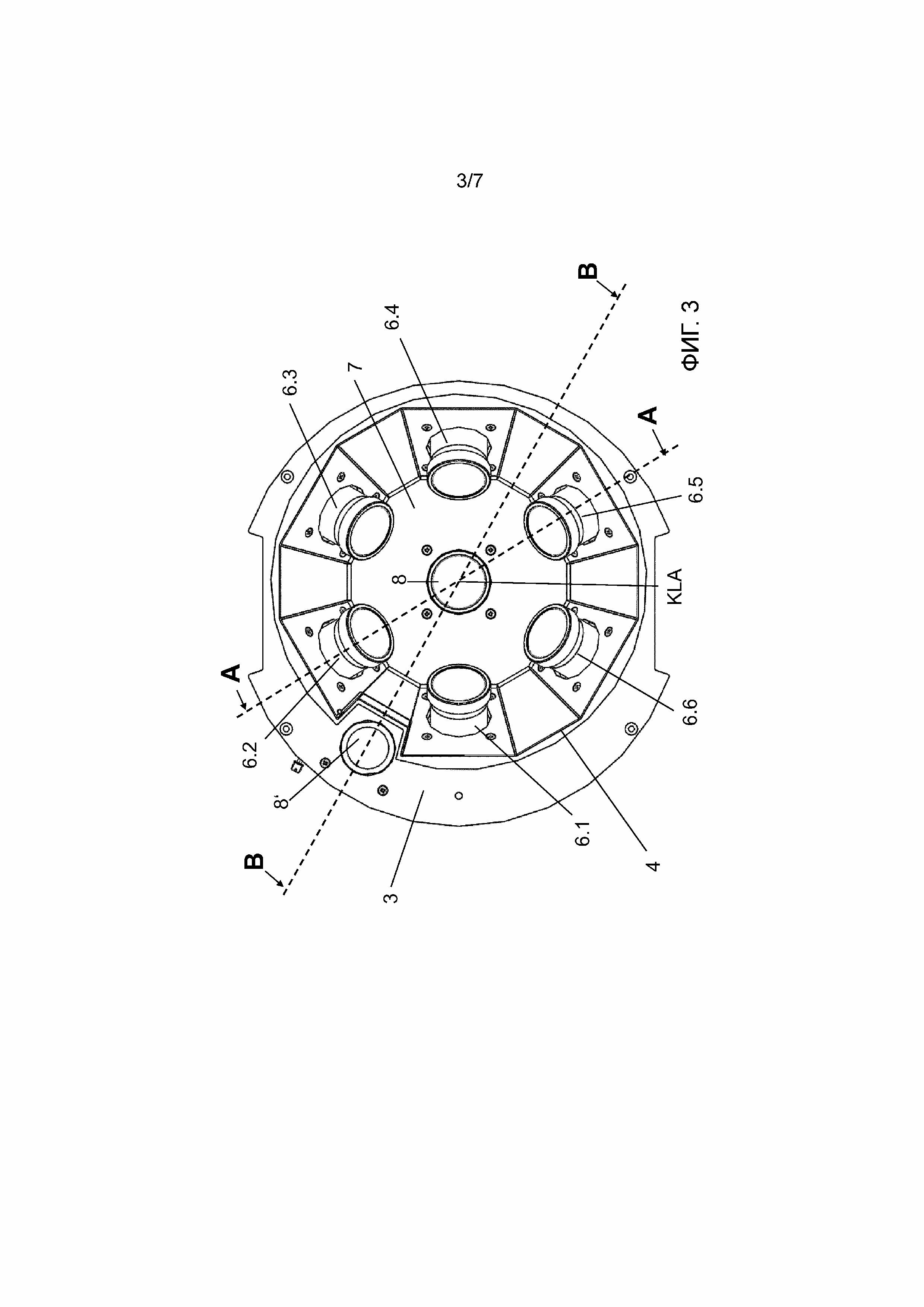
фиг.3: схематичный вид в плане нижней стороны корпуса одного из вариантов осуществления предлагаемой изобретением мультисенсорной камеры без крышки;
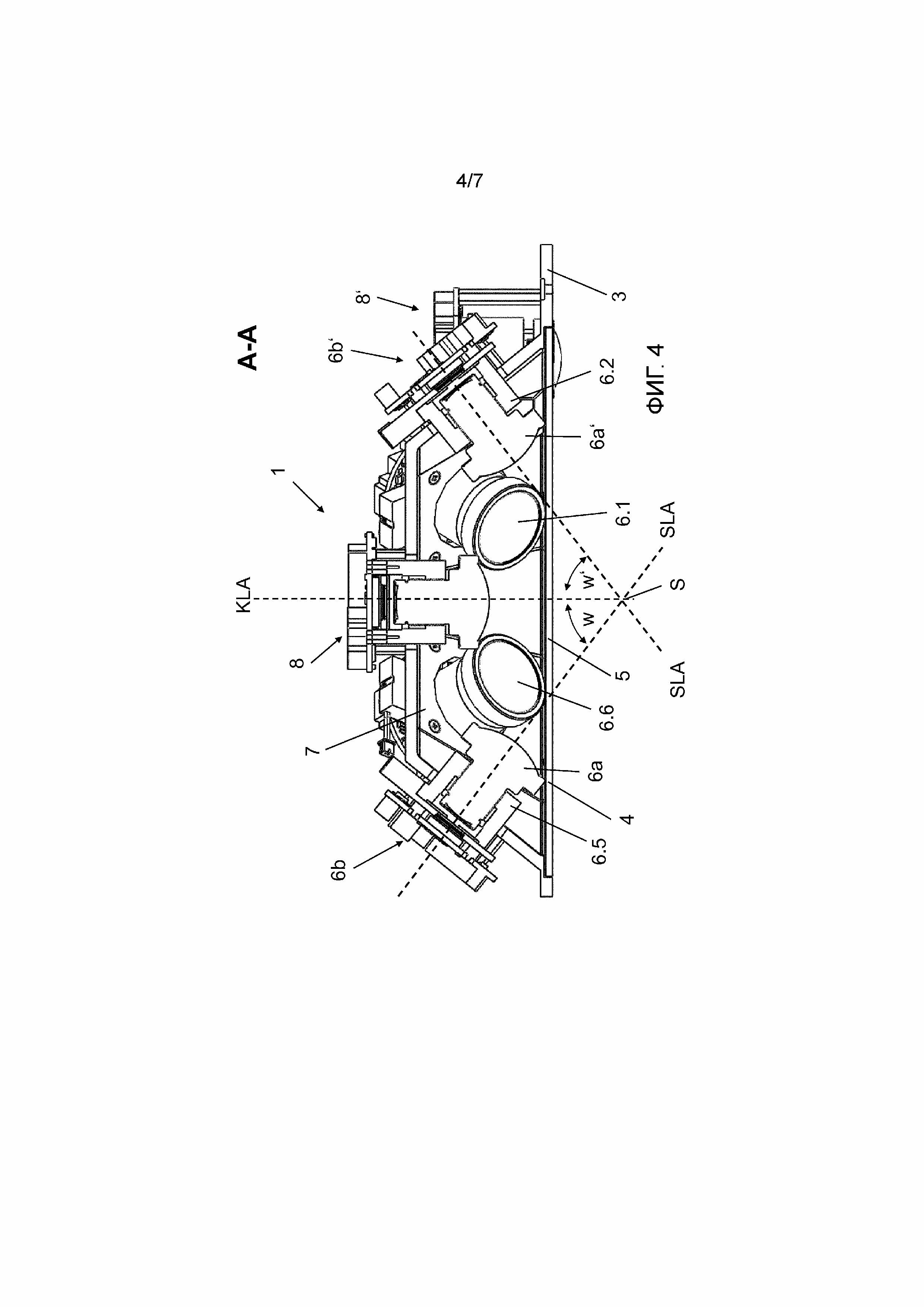
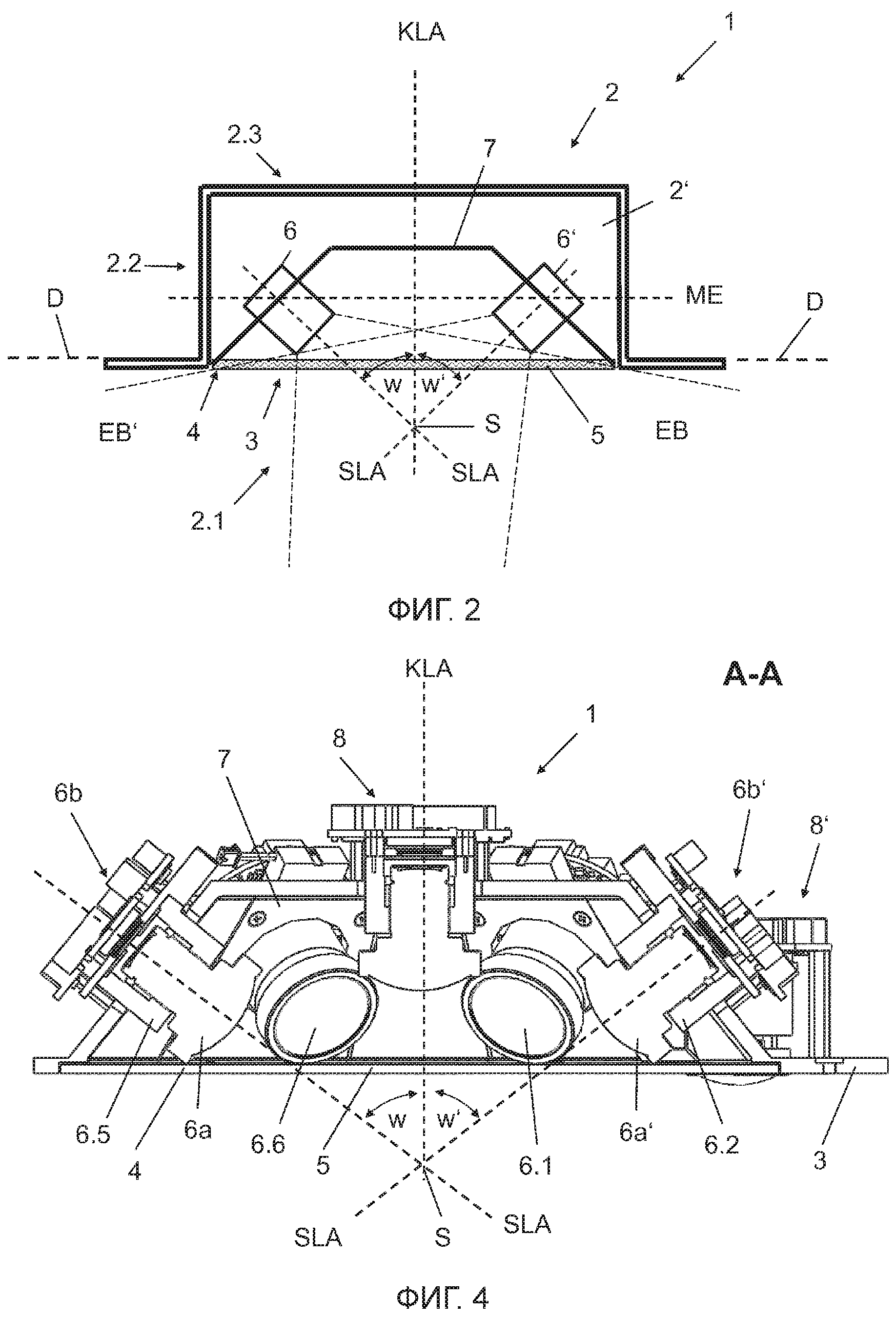
фиг.4: схематичное сечение по линии A–A мультисенсорной камеры, показанной на фиг.3, имеющей крышку, однако без стенки корпуса и верхней стороны корпуса;
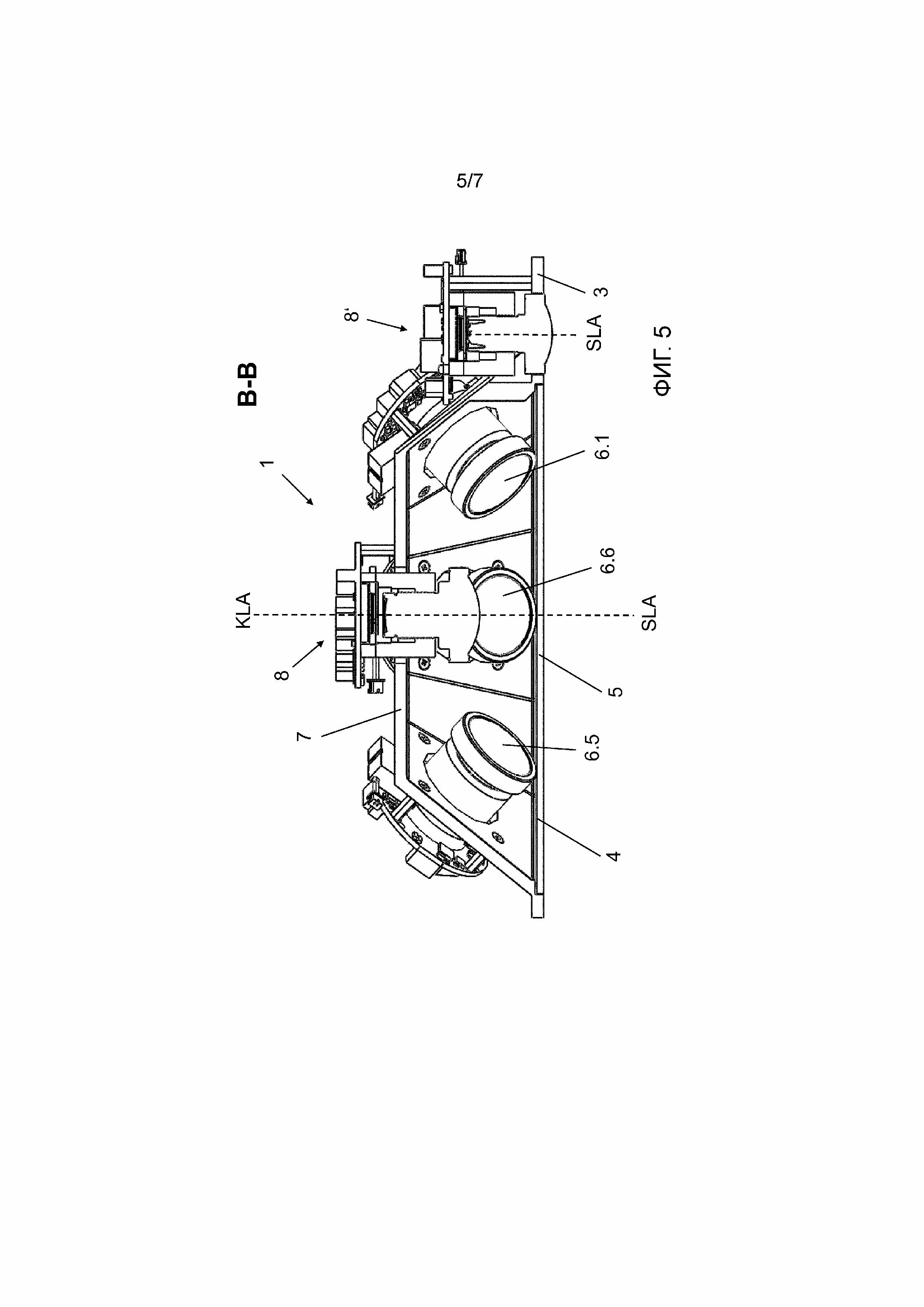
фиг.5: схематичное сечение по линии B–B мультисенсорной камеры, показанной на фиг.3, имеющей крышку, однако без стенки корпуса и верхней стороны корпуса;
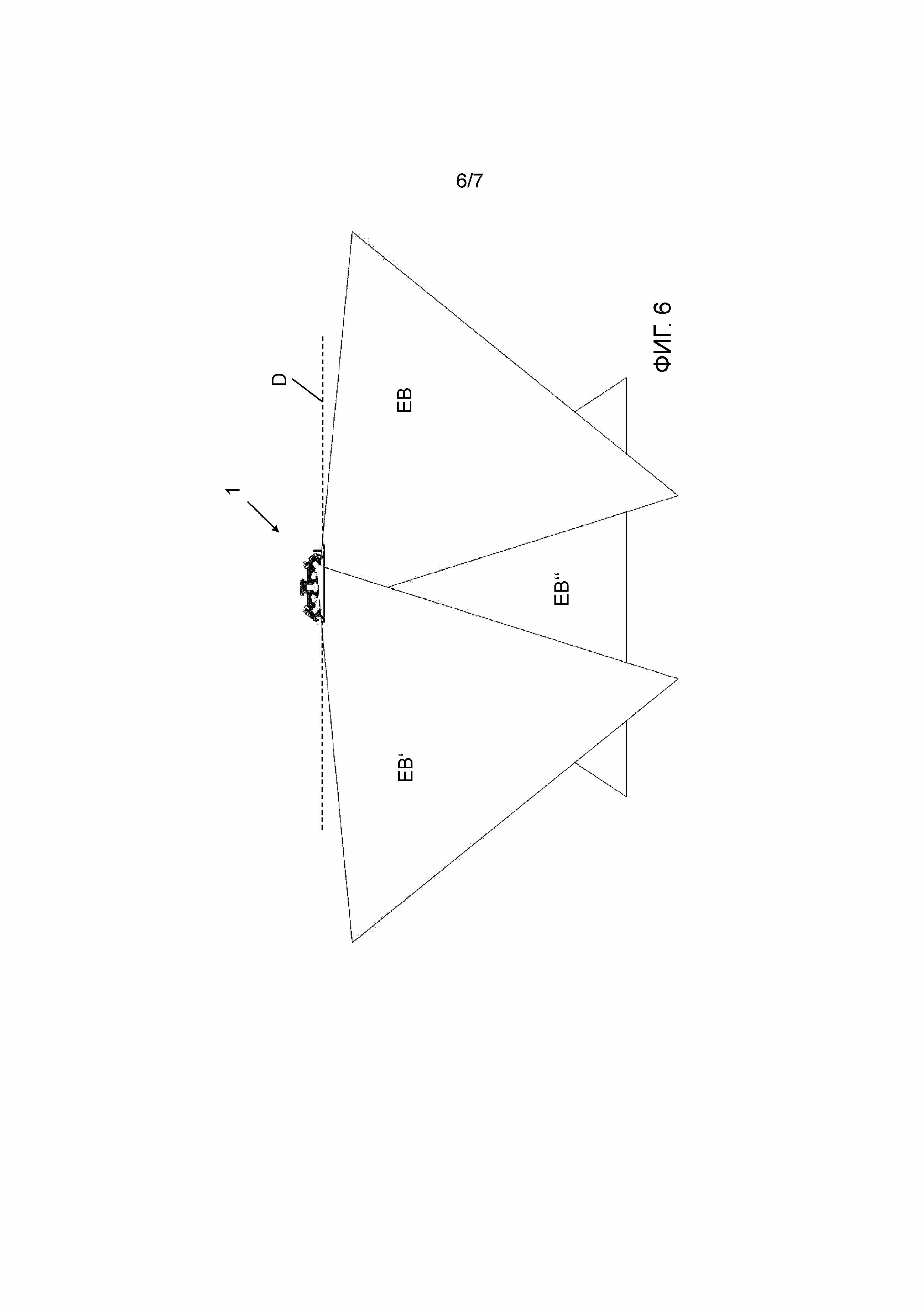
фиг.6: вид сбоку схематично представленных областей регистрации отдельных блоков сенсоров изображений мультисенсорной камеры, смонтированной на потолке, и
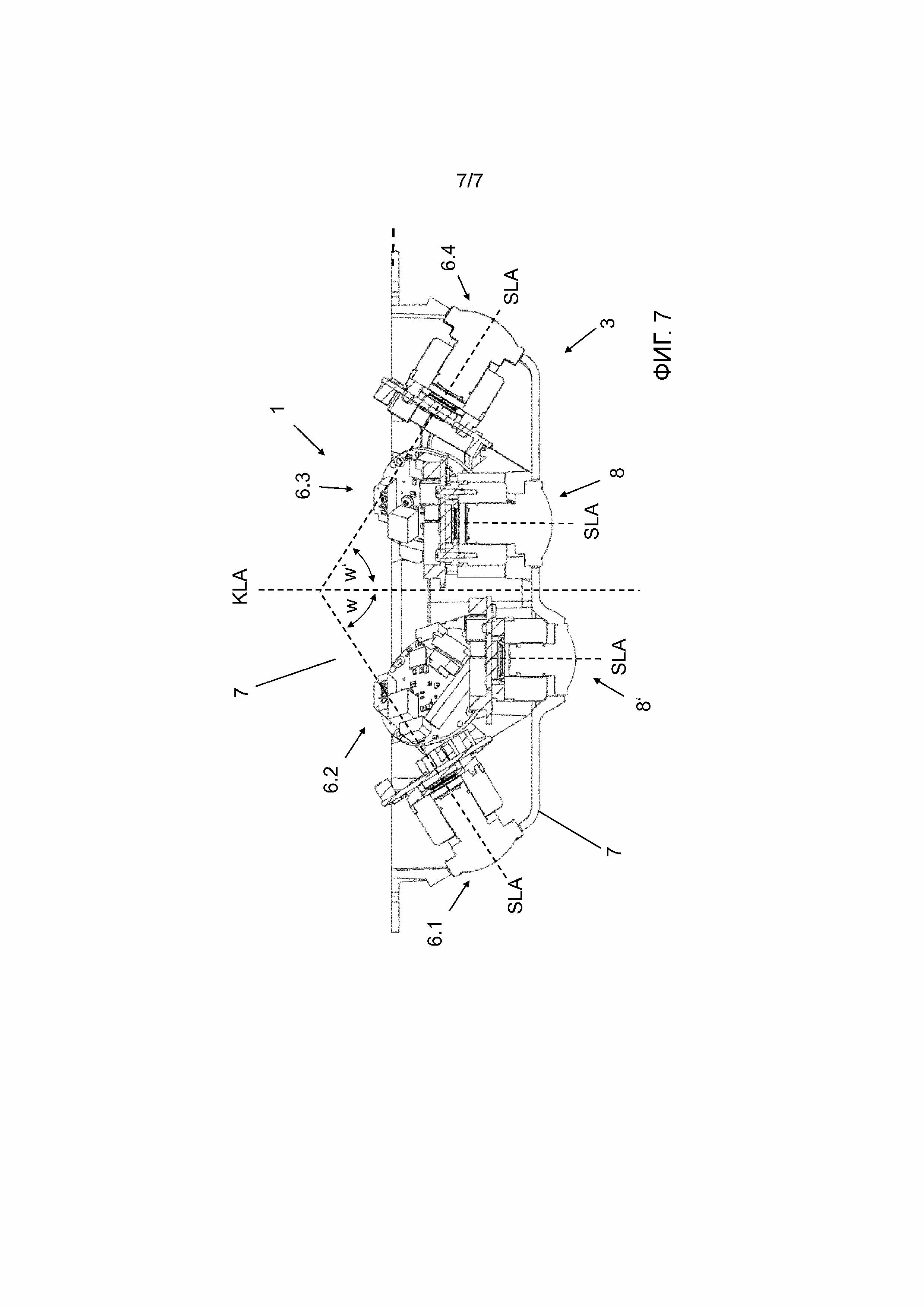
фиг.7: схематичное изображение сечения, аналогично фиг.5, корпуса предлагаемой изобретением мультисенсорной камеры, имеющей альтернативное расположение блоков сенсоров изображений.
На фиг.1 показан схематичный вид сбоку помещения R, которое подвергается видеонаблюдению посредством предлагаемой изобретением мультисенсорной камеры 1, встроенной в потолок D помещения R заподлицо с поверхностью.
Для этого предлагаемая изобретением мультисенсорная камера 1 в изображенном примере осуществления в области середины помещения R интегрирована в потолок D помещения, и причем заподлицо с поверхностью со стороной потолка D помещения, указывающей внутрь помещения R или, соответственно, к полу B помещения R.
Под встраиванием мультисенсорной камеры 1заподлицо с поверхностью в предлагаемом изобретением смысле понимается встраивание мультисенсорной камеры 1 в ровную область потолка помещения R таким образом, чтобы нижняя сторона мультисенсорной камеры 1 не вдавалась или только незначительно вдавалась во внутреннее помещение R, и при этом также после встраивания мультисенсорной камеры 1 продолжало существовать по меньшей мере визуальное впечатление ровного закрытого потолка помещения R. Известные куполообразные камеры, имеющие объективы «рыбий глаз», хотя и могут крепиться на полотке D помещения, однако, в отличие от предлагаемой изобретением мультисенсорной камеры 1, по меньшей мере частично заметно вдаются в помещение R, т.е. не встроены заподлицо с поверхностью с потолком помещения R.
Предлагаемая изобретением мультисенсорная камера 1 имеет предпочтительно горизонтальную область HEB регистрации и вертикальную область VEB регистрации по меньшей мере 140°, предпочтительно 180°. При этом от проходящей во встроенном состоянии вертикально к потолку помещения R или, соответственно, к полу B помещения продольной оси KLA камеры вокруг продольной оси KLA камеры на 360° распространяется горизонтальная область HEB регистрации, а также по меньшей мере на +/–70° вокруг вертикально проходящей продольной оси KLA камеры вертикальная область VEB регистрации. Таким образом, предлагаемая изобретением мультисенсорная камера 1 образует при этом камеру 360°, которая находит применение в области видеоконтроля предпочтительно закрытых помещений. В определенной области регистрации возможна 360°–я и вместе с тем полная регистрация разыгрывающихся там ситуаций. У известных мультисенсорных камер, имеющих горизонтальную область VEB регистрации 360°, блоки сенсоров изображений всегда находятся под потолком D помещения. Здесь возникает необходимость в данном изобретении.
Предлагаемая изобретением мультисенсорная камера 1 включает в себя по меньшей мере один распространяющийся по продольной оси KLA камеры корпус 2, имеющий нижнюю сторону 2.1 корпуса, по меньшей мере одну боковую стенку 2.2 корпуса, а также верхнюю сторону 2.3 корпуса. Нижняя сторона 2.1 корпуса имеет проходящее по меньшей мере на отдельных участках перпендикулярно к продольной оси KLA камеры дно 3 корпуса, располагающее отверстием 4 для регистрации изображений, которое может закрываться посредством оптически прозрачной, плоской и предпочтительно съемной защитной пластины 5.
Защитная пластина 5 изготовлена предпочтительно из стекла или прозрачного полимерного материала и может быть также выполнена, например, цельной или составной. При закрытом посредством защитной пластины 6 отверстии 4 для регистрации изображений возникает предпочтительно закрытое внутреннее пространство 2‘ корпуса, которое заключается между дном 3 корпуса, присоединяющейся к нему по присоединяющейся продольной оси KLA камеры стенкой 2.2 корпуса, а также противоположной дну 3 корпуса верхней стороной 2.3 корпуса.
В соответствии с изобретением теперь в корпусе 2 или, соответственно, во внутреннем пространстве 2‘ этого корпуса предусмотрены несколько блоков 6, 6‘ сенсоров изображений для регистрации цифровых отдельных изображений с высоким разрешением. Каждый такой блок 6, 6‘ сенсора изображения распространяется по продольной оси SLA сенсора и имеет объектив 6a, 6a‘ и присоединяющийся к нему по продольной оси SLA сенсора сенсор 6b, 6b‘ изображения. При этом продольная ось SLA сенсора соответствует предпочтительно оптической оси объектива 6a, 6a‘ или, соответственно, проходит по меньшей мере параллельно ей. Блоки 6, 6‘ сенсоров изображений концентрически распределены вокруг продольной оси KLA камеры, расположены над дном 3 корпуса и внутри корпуса 2 или, соответственно, во внутреннем пространстве 2‘ корпуса, и причем таким образом, что объективы 6a, 6a‘ блоков 6, 6‘ сенсоров изображений ориентированы к продольной оси KLA камеры. При этом оптические оси объективов 6a, 6a‘ ориентированы в направлении продольной оси KLA камеры и перекрещиваются при этом в области камеры 1.
Например, продольная ось SLA сенсора блока 6, 6‘ сенсора изображения составляет острый угол w, w‘ c продольной осью KLA камеры. В одном из предпочтительных вариантов осуществления этот острый угол w, w‘ составляет от 15° до 80°, предпочтительно от 35° до 65°.
Благодаря косому расположению блоков 6, 6‘ сенсоров изображений относительно продольной оси KLA камеры и концентрическому, предпочтительно кольцеобразному распределению их вокруг продольной оси KLA камеры становится возможной 360°–я регистрация изображений посредством полностью встроенных во внутреннее пространство 2‘ корпуса блоков 6, 6‘ сенсоров изображений и вместе с тем также потолочный монтаж заподлицо с поверхностью.
На фиг.2 в качестве примера представлено схематичное изображение сечения предлагаемой изобретением мультисенсорной камеры 1, встроенной в потолок D помещения заподлицо с поверхностью, у которой в качестве примера показаны только два блока 6 6‘ сенсоров изображений.
Эти блоки 6,6‘ сенсоров изображений расположены предпочтительно в проходящей перпендикулярно к продольной оси KLA камеры плоскости ME монтажа, которая проходит параллельно и на расстоянии от дна 3 корпуса или, соответственно, от защитной пластины 5 корпуса 2 мультисенсорной камеры 1. Блоки 6, 6‘ сенсоров изображений предпочтительно расположены в корпусе 2 наискосок друг к другу таким образом, что их продольные оси SLA сенсоров и продольная ось KLA камеры пересекаются в общей виртуальной точке S пересечения вне корпуса 2. Причем эта точка пересечения лежит под корпусом 2 или, соответственно, дном 3 корпуса. Предпочтительно блоки сенсоров изображений расположены в корпусе 2, будучи кольцеобразно распределены вокруг продольной оси KLA камеры, и находятся каждый на одном и том же радиальном расстоянии от продольной оси KLA камеры. Области EB, EB‘ регистрации отдельных блоков 6, 6‘ сенсоров изображений при предлагаемом изобретением расположении распространяются от внутреннего пространства 2‘ корпуса через отверстие 4 для регистрации изображений или, соответственно, закрывающую его прозрачную, ровную защитную пластину 5 наружу.
Для крепления блоков 6, 6‘ сенсоров изображений, например, внутри корпуса 2 могут быть предусмотрены удерживающие средства 7 для их помещения и предпочтительно разъемного крепления, которые куполообразно открываются в направлении отверстия 4 для регистрации изображений. В настоящем примере осуществления удерживающие средства 7 образованы куполообразной удерживающей конструкцией, включающей в себя множество распорных и плоских элементов, которые делают возможным разъемное крепление блоков 6, 6‘ сенсоров изображений в заданном, проходящем наискосок к продольной оси KLA камеры положении удерживания. В этом положении удерживания оптики или, соответственно, объективы 6a, 6a‘ ориентированы в направлении продольной оси KLA камеры. Эта куполообразная удерживающая конструкция 7 имеет для этого, например, трапецеидальное поперечное сечение, нижняя сторона которого открыта и приблизительно соответствует ходу края отверстия 4 для регистрации изображений. Также куполообразная удерживающая конструкция 7 может быть выполнена в виде модуля, при этом она вместе с закрепленными на ней блоками 6, 6‘ сенсора изображения может сменяться для их упрощенного монтажа и/или технического обслуживания.
На фиг.3 показан вид в плане нижней стороны 2.1 корпуса одного из вариантов осуществления предлагаемой изобретением мультисенсорной камеры 1, а именно, без защитной пластины 5, при котором, в качестве примера, во внутреннем пространстве 2‘ корпуса, будучи концентрически распределены вокруг продольной оси KLA камеры, расположены шесть блоков 6, 6‘ сенсоров изображений, которые расположены во внутреннем пространстве 2‘ корпуса каждый под острым углом w, w‘ к продольной оси KLA камеры. В настоящем примере осуществления мультисенсорная камера 1 имеет первый–шестой блок 6.1–6.6 сенсоров изображений, которые кольцеобразно и каждый на одном и том же расстоянии расположены вокруг продольной оси KLA камеры, проходящей перпендикулярно к плоскости листа.
В соответствии с изобретением предусмотрен по меньшей мере один другой блок 8, 8‘ сенсора изображения, продольная ось SLA сенсора которого проходит параллельно продольной оси KLA камеры или совпадает с ней. В настоящем примере осуществления предусмотрен первый и второй другой блок 8, 8‘ сенсора изображения, причем указанный первый другой блок 8 сенсора изображения расположен в корпусе 2 или, соответственно, внутреннем пространстве 2‘ корпуса таким образом, что его продольная ось SLA сенсора совпадает с продольной осью KLA камеры. Указанный второй другой блок 8‘ сенсора изображения помещен в дне 4 корпуса, а именно, предпочтительно в краевой области отверстия 4 для регистрации изображений, таким образом, что его продольная ось SLA сенсора проходит параллельно продольной оси KLA камеры. Альтернативно также продольные оси сенсоров обоих других блоков 8, 8‘ сенсоров изображений могут проходить параллельно продольной оси KLA камеры.
Посредством указанных других блоков 8, 8‘ сенсоров изображений возможна регистрация области помещения, находящейся непосредственно под мультисенсорной камерой 1. Для этого первый другой блок 8 сенсора изображения имеет, например, схематично обозначенную на фиг.6 область EB‘‘ регистрации. Один из других блоков 8‘ сенсоров изображений, а именно, в настоящем случае осуществления второй другой блок 8‘ сенсора изображения имеет в соответствии с изобретением объектив «рыбий глаз», посредством которого может создаваться снимок 360°. Область регистрации второго другого блока 8‘ сенсора изображения, имеющего объектив «рыбий глаз», распространяется по всему помещению, т.е. включает в себя все области EB, EB‘, EB‘‘ регистрации блоков 6, 6‘, 6.1–6.6 сенсоров изображений или, соответственно, первого другого блока 8 сенсора изображения.
Другой блок 8‘ сенсора изображения, имеющий объектив «рыбий глаз», образует при этом сенсор обзорного изображения, который предусмотрен для создания обзорного видеоизображения. Первый–шестой блок 6.1–6.1 сенсора изображения являются сенсорами детального изображения для создания детальных видеоизображений, имеющих заметно более высокие разрешения по сравнению с обзорным видеоизображением. Предлагаемая изобретением мультисенсорная камера 1 предоставляет видеоданные некоторой области помещения или, соответственно, области съемки, имеющие различные детальные разрешения, между которыми может осуществляться переключение при представлении видеоизображения на мониторе.
На каждой из фиг.4 и 5 показано продольное сечение по линии A–A или, соответственно, B–B мультисенсорной камеры 1 в соответствии с фиг.3, но с защитной пластиной 5. Помимо этого, на фиг.4 и 5 не изображены стенка 2.2 корпуса и верхняя сторона 2.3 корпуса, а только нижняя сторона 2.1 корпуса или, соответственно, дно 3 корпуса.
При этом в примере осуществления в соответствии с фиг.3–5 находят применение в сумме восемь блоков 6.1–6.6, 8, 8‘ сенсоров изображений. Однако изобретение никоим образом не ограничено представленным количеством блоков 6.1–6.6 сенсоров изображений или, соответственно, другими блоками 8, 8‘ сенсоров изображений , а разумеется, что могут встраиваться какое угодно количество располагаемых в плоскости ME монтажа, равномерно распределенных вокруг продольной оси KLA камеры блоков 6, 6‘ сенсоров изображений и дополнительно встраиваемые в дно 3 корпуса и/или во внутреннее пространство 2‘ корпуса другие блоки 8, 8‘ сенсоров изображений , если это кажется технически целесообразным. Предпочтительно четыре, шесть или восемь блоков 6, 6‘ сенсоров изображений расположены внутри корпуса 2 наискосок к продольной оси KLA камеры и будучи концентрически распределены вокруг продольной оси KLA камеры.
На фиг.4 показано также сечение двух противоположных блоков 6, 6‘ сенсоров изображений, из которого видно расположение объективов 6a, 6a‘ и принадлежащих им сенсоров 6b, 6b‘ по каждой из продольных осей SLA сенсоров.
Блоки 6, 6‘ сенсоров изображений или, соответственно, другие блоки 8, 8‘ сенсоров изображений могут иметь объективы 6a, 6a‘, имеющие одни и те же или различные фокусные расстояния. При применении объективов 6a, 6a‘, имеющих различные фокусные расстояния, посредством блоков 6, 6‘ сенсоров изображений или, соответственно, других блоков 8, 8‘ сенсоров изображений также контролируемые области, лежащие в помещении R более удаленно от мультисенсорной камеры 1, чем области помещения, находящиеся ближе к мультисенсорной камере 1, могут записываться с более высоким разрешением применительно к пространственному углу в единицах измерения «пикселей/метр».
Посредством мультисенсорной камеры 1 в одном из предпочтительных вариантов осуществления все области подлежащего контролю помещения R, независимо от удаленности от мультисенсорной камеры 1, регистрируются с высоким разрешением и записываются в соединенном с мультисенсорной камерой 1 одном или нескольких рекордерах, предпочтительно цифровых рекордерах системы контроля.
На фиг.6 в качестве примера изображены области EB, EB‘, EB‘‘ регистрации блоков 6, 6‘ сенсоров изображений или, соответственно, одного из других блоков 8 сенсоров изображений на схематичном виде сбоку смонтированной на потолке, показанной в сечении мультисенсорной камеры 1. Отсюда отчетливо видно, что эти области EB, EB‘, EB‘‘ регистрации перекрещиваются уже внутри корпуса 2.
На фиг.7 в качестве примера показано схематичное сечение, аналогично фиг.5, одного из альтернативных вариантов осуществления мультисенсорной камеры 1, при котором объективы 6a, 6a‘ блоков 6.1–6.6 сенсоров изображений ориентированы к продольной оси KLA камеры или указывают от продольной оси KLA камеры. Продольные оси SLA сенсоров блоков 6.1–6.6 сенсоров изображений и здесь снова составляют острый угол w, w‘ с продольной осью KLA камеры, при этом продольные оси SLA сенсоров других блоков 8, 8‘ сенсоров изображений проходят параллельно продольной оси KLA камеры. При этом варианте осуществления мультисенсорной камеры 1 удерживающие средства 7 снова образованы куполообразной удерживающей конструкцией, которая, например, имеет трапецеидальное поперечное сечение и открыта к верхней стороне 2.3 корпуса. Эта куполообразная удерживающая конструкция 7 образует предпочтительно также нижнюю сторону 2.1 корпуса или, соответственно, дно 3 корпуса, так что отверстие 4 для регистрации изображений отпадает. Блоки 6.1–6.6 сенсоров изображений снова расположены в корпусе 2, будучи кольцеобразно распределены вокруг продольной оси KLA камеры, при этом другие блоки 8, 8‘ сенсоров изображений находятся на меньшем расстоянии от продольной оси KLA камеры, чем указанные окружающие ее блоки 6.1–6.6 сенсоров изображений . Таким образом, эти другие блоки 8, 8‘ сенсоров изображений помещены или, соответственно, расположены в образованном блоками 6.1–6.6 сенсоров изображений «кольце сенсоров». В этом положении удерживания оптики или, соответственно, объективы блоков 6.1–6.6 сенсоров изображений указывают от продольной оси KLA камеры, т.е. ориентированы наружу. Куполообразная удерживающая конструкция может быть также выполнена модульно, так чтобы для упрощенного монтажа и/или технического обслуживания было возможно ее извлечение вместе с закрепленными на ней блоками 6.1–6.6 сенсоров изображений и другими блоками 8, 8‘ сенсора изображения.
Изобретение было описано выше на примерах осуществления. Разумеется, что возможны многочисленные изменения, а также модификации без отхода от лежащей в основе изобретения идеи изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Мультисенсорная камера
2 Корпус
2‘ Внутреннее пространство корпуса
2.1 Нижняя сторона корпуса
2.2 Стенка корпуса
2.3 Верхняя сторона корпуса
3 Дно корпуса
4 Отверстие для регистрации изображений
5 Прозрачная, ровная защитная пластина
6, 6‘ Блок сенсора изображения
6a, 6a‘ Объектив
6b, 6b‘ Сенсор изображения
6.1–6.6 Первый–шестой блок сенсора изображения
7 Удерживающие средства
8, 8‘ Другой блок (другие блоки) сенсора изображения
B Пол
D Потолок
EB, EB‘, EB‘‘ Области регистрации
HEB Горизонтальная область регистрации
ME Область монтажа
P Человек
R Помещение
S Общая виртуальная точка пересечения
VEB Вертикальная область регистрации
W, w‘ Острый угол
Система контроля и воздействия на объекты, представляющие интерес, и выполняемые ими процессы и соответствующий способ

