Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ КОНТАКТОВ С РЕКЛАМНЫМ НОСИТЕЛЕМ В НАРУЖНОЙ РЕКЛАМЕ
Вид РИД
Изобретение
Область техники
Изобретение относится к области наружной рекламы, в частности, к методам оценки контактов аудитории с рекламными носителями для последующего определения эффективности рекламных кампаний.
Уровень техники
В настоящее время на рынке наружной рекламы используются различные виды рекламных поверхностей - статические поверхности на билбордах и на фасадах домов, поворотные поверхности, способные отображать несколько рекламных блоков с регулярной периодичностью, цифровые суперсайты, способные как отображать цифровой контент с заранее запланированной последовательностью рекламных роликов, так и в реальном времени получать контент для отображения.
Общей задачей для всех видов рекламы является оценка ее эффективности, которая в наружной рекламе зависит в первую очередь от трафика потребителей вблизи рекламных поверхностей и их возможности контактировать с рекламной поверхностью (т.е. видеть ее). Задача дополнительно усложняется тем, что для носителей с переменным содержанием (например, для цифровых суперсайтов) характерны показы отдельных сообщений в течение короткого времени (например, рекламных роликов длительностью 5-7 секунд). Это требует более точного определения потока потребителей для выделения сессий контактов с рекламной поверхностью в определенные моменты времени.
Известны способы сбора информации для анализа аудитории в наружной рекламе и измерения эффективности размещения наружной рекламы, которые предусматривают регистрацию потенциальных потребителей наружной рекламы в зоне ее нахождения по MAC - адресам win их переносных устройств, регистрацию посетителей в рекламируемой локации или локации с рекламируемым товаром тем же способом (по MAC - адресам wifi их переносных устройств) и определение конверсии - выявление среди посетителей рекламируемой локации (локации с рекламируемым товаром) тех, кто находился вблизи соответствующей локации наружной рекламы (RU 2016143024, опубл. 07.05.2018, US 20120303446, опубл. 29.11.2012).
Первым недостатком известных способов является то, что в них презюмируется контакт потребителя с рекламным носителем лишь по факту нахождения мобильного устройства потребителя вблизи рекламного носителя, что в действительности совершенно не гарантировано. Пользователь мобильного устройства с определенным МАС-адресом может находиться рядом с местом расположения рекламного носителя, но не иметь возможности контактировать с рекламной поверхностью (в частности, находиться рядом с билбордом, но с противоположной стороны от рекламной поверхности, либо проезжать мимо билборда в направлении, не позволяющем увидеть рекламную поверхность). В результате, в известных способах снижается достоверность данных о контактах аудитории с рекламными сообщениями, что в результате приводит к неверным расчетам эффективности. Также, известные способы не позволяют определять контакты с конкретным рекламным сообщением на динамических (изменяемых) рекламных поверхностях. Дополнительным недостатком и ограничением является то, что для реализации способа средства регистрации МАС-адресов располагаются непосредственно в каждой рекламной локации, что является неоптимальным и избыточным в городских условиях с высокой плотностью рекламных носителей.
Сущность изобретения
Задачей настоящего изобретения является создание способа измерения контактов с носителями наружной рекламы, в котором устранялись бы недостатки ранее известных способов, и который в частности позволял бы более точно и эффективно измерять контакты с рекламными носителями разных типов, включая динамические (с изменяемой рекламной поверхностью).
Задача решается в способе измерения контактов с рекламным носителем в наружной рекламе, в котором по меньшей мере, одним средством сканирования осуществляют в различные моменты времени сбор данных об объектах наблюдения, находящихся в зоне сканирования. Указанные данные включают в себя по крайней мере один уникальный идентификатор объекта наблюдения, а также данные о положении объекта наблюдения, и по собранным таким образом данным об объекте наблюдения оценивают его наиболее вероятное положение в различные моменты времени и направление его перемещения, на основании чего далее оценивают время нахождения объекта наблюдения в заданной зоне видимости рекламного носителя по моменту входа в эту зону и моменту выхода из этой зоны.
В качестве объекта наблюдения может быть выбрано мобильное устройство,
в этом случае уникальный идентификатор может представлять собой МАС-адрес мобильного устройства.
В качестве объекта наблюдения может быть выбрано также транспортное средство, в этом случае в качестве уникального идентификатора объекта наблюдения можно использовать регистрационный номерной знак транспортного средства.
Еще в одном частном случае в качестве объекта наблюдения выбирают человека, при этом в качестве уникального идентификатора объекта наблюдения используют его биометрические персональные данные.
В частном случае данные о положении объекта наблюдения содержат параметр, характеризующий удаленность объекта наблюдения от средства сканирования.
В частном случае для определения наиболее вероятного положения объекта наблюдения, в направлении его перемещения в определенный момент времени, дополнительно используют исторические данные об этом объекте наблюдения, собранные в предшествующие моменты времени.
При этом исторические данные об объекте наблюдения могут включать в себя данные о перемещении объекта наблюдения в предшествующие моменты времени.
Предпочтительно для каждого рекламного носителя, используемого в наружной рекламе, задают зону его видимости, которую определяют, исходя из азимута ориентации рекламного носителя, угла обзора рекламного носителя, дальности видимости рекламного носителя.
В частном случае заданная зона видимости может представлять собой определенный в географических координатах круговой или шаровой сектор с центром в месте нахождения рекламного носителя.
Предлагаемый способ позволяет повысить точность и эффективность оценки аудитории рекламных поверхностей. Как и на предшествующем уровне техники, способ основан на возможности связывать определенные наблюдаемые объекты с личностью конкретных людей - потенциальных потребителей рекламы, и, на основании этого, делать обоснованные суждения относительно контактов этих потребителей с рекламной информацией. В уровне техники в качестве объектов наблюдения использовали мобильные устройства, которые связаны с определенными людьми (абонентами) и при этом имеют уникальные идентификаторы, регистрация которых позволяет определить положение абонента в определенный момент времени. В то же время для измерения контактов аудитории с рекламой можно использовать и другие объекты для наблюдения, которые также связаны с конкретными потребителями - в частных случаях это могут быть сами потенциальные потребители рекламы, а также их транспортные средства. Для измерения контакта потребителя с рекламным носителем можно одновременно использовать несколько связанных с ним объектов (т.е. учитывать данные о положении и перемещении мобильных устройств, транспортных средств и самого потребителя).
В отличие от ранее известных, заявленный способ учитывает не только факт нахождения наблюдаемого объекта (например, мобильного устройства потребителя) вблизи рекламной поверхности, но и наиболее вероятную траекторию его движения, что с учетом заданной модели области видимости рекламной поверхности позволяет определять факт и длительность нахождения потребителя в зоне видимости рекламного носителя, определять количество вероятных контактов потребителя с рекламными поверхностями на протяжении заданного периода времени (например, в течение рекламной кампании), что, в свою очередь, повышает достоверность и точность измерений контактов аудитории с рекламными носителями. Переход в заявленном способе от простой фиксации нахождения регистрируемых объектов в локации рекламного носителя к модели с разделением регистрации, определением наиболее вероятной траектории движения и совмещением этого с моделью области видимости носителя позволяет также снять ограничение на размещение сканирующего оборудования только на элементах конструкций рекламных поверхностей, либо в непосредственной близости к ним. Одно и то же сканирующее оборудование может использоваться для измерения контактов с несколькими различными рекламными поверхностями. Получение раздельных оценок положения и движения потребителей от сессий контакта с рекламными поверхностями позволяет также повторно использовать исторические данные о положении и движении для оценки контактов с ранее не заведенными рекламными поверхностями. Кроме того, следует учитывать, что и на предшествующем уровне техники, и в предлагаемом способе определение контакта с рекламной поверхностью носит вероятностный характер. В предлагаемом способе раздельный учет физических явлений (модели измерений, модели движения, области видимости носителя) позволяет строить различные описательные модели, способные не только оценить параметры (положения, движения, и как следствие сессии контакта с носителем), но и сопроводить данные оценки характеристиками неопределенности для случаев недостаточности измерений.
Эти и другие преимущества будут более подробно раскрыты далее на примерах наиболее предпочтительных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
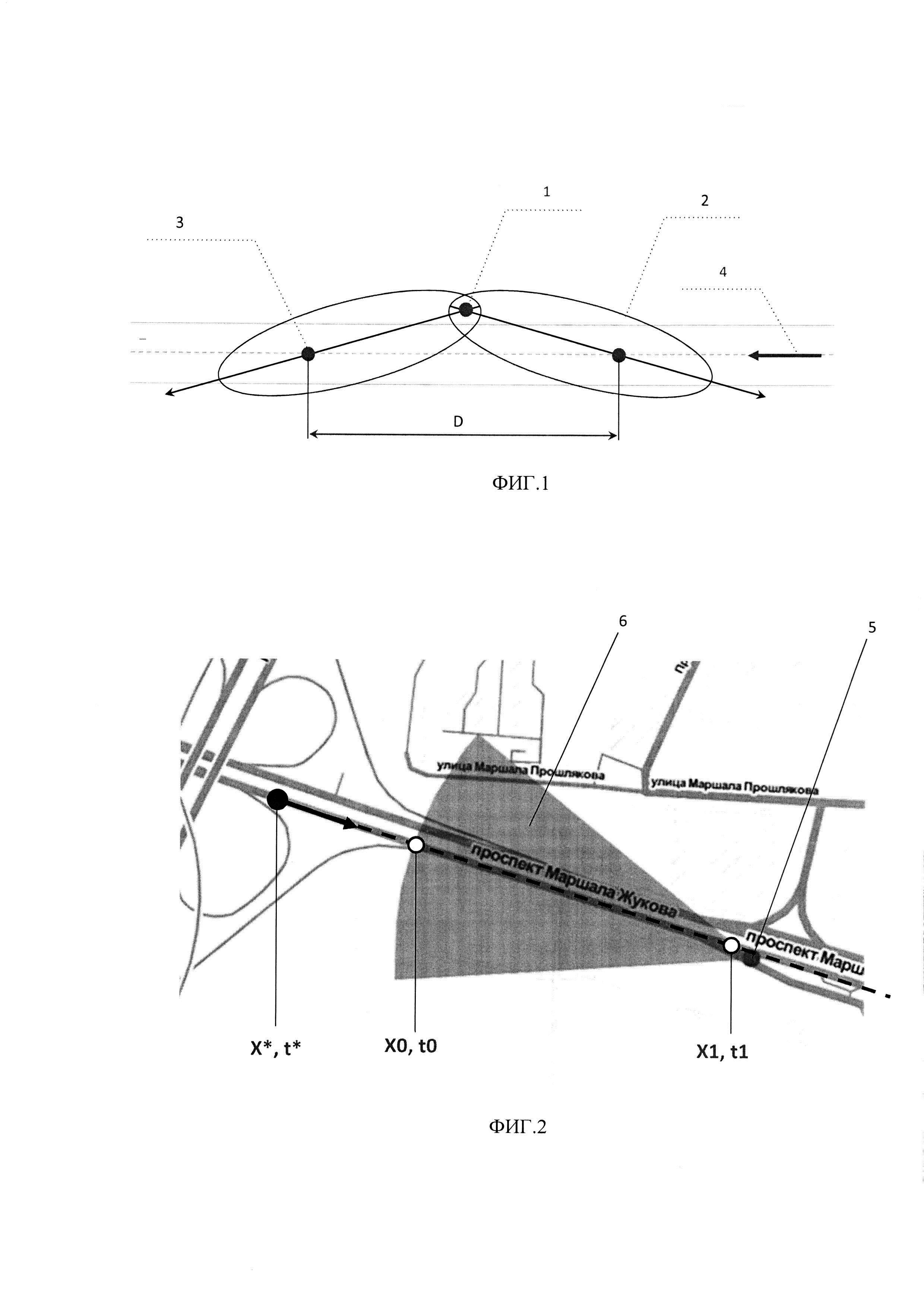
На фиг. 1 приведена схема возможного размещения средств сканирования в примере простейшей модели измерений.
На фиг. 2 приведена схема полигона видимости рекламной поверхности с примером построения сессии нахождения объекта наблюдения в области видимости рекламной поверхности.
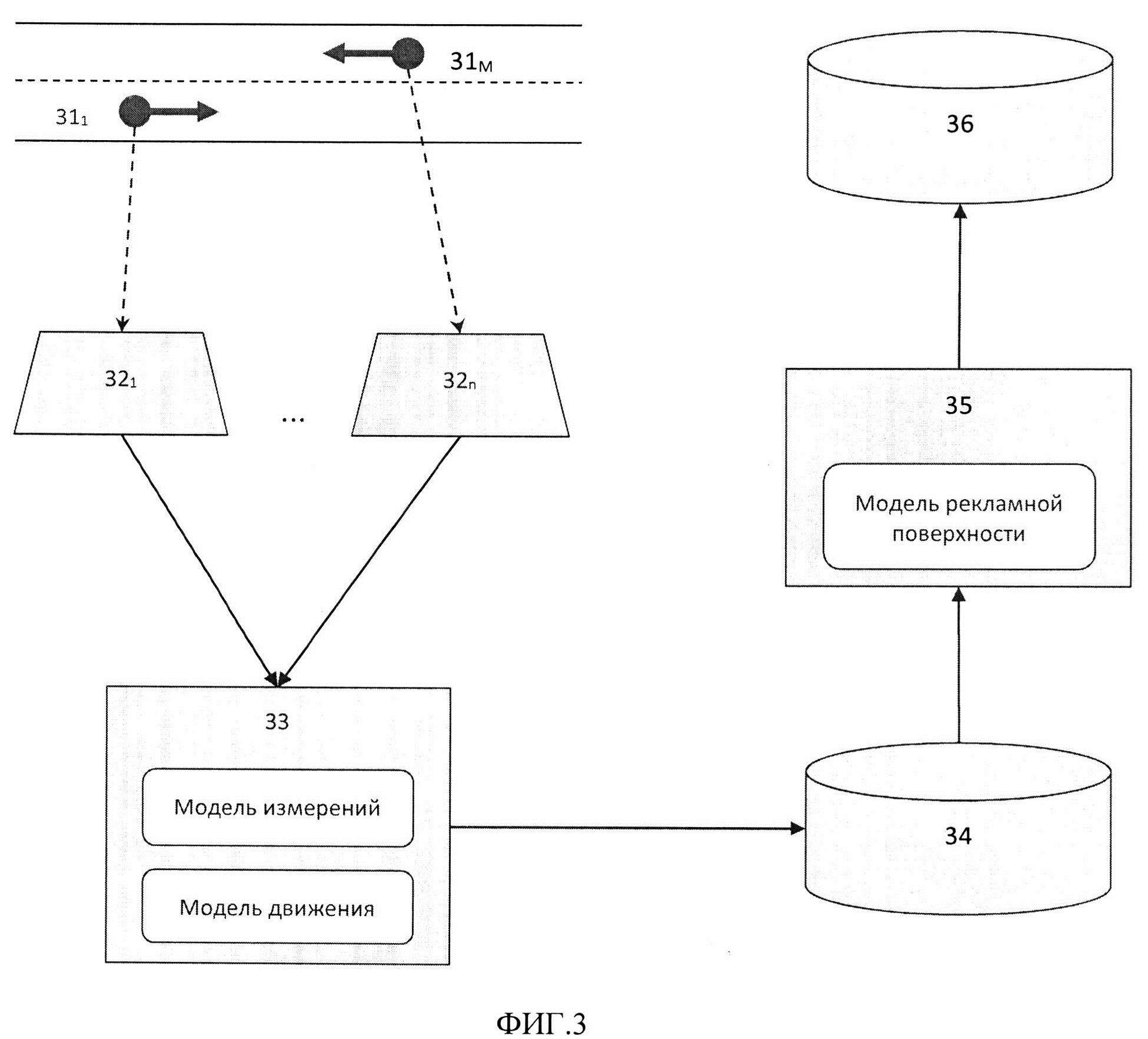
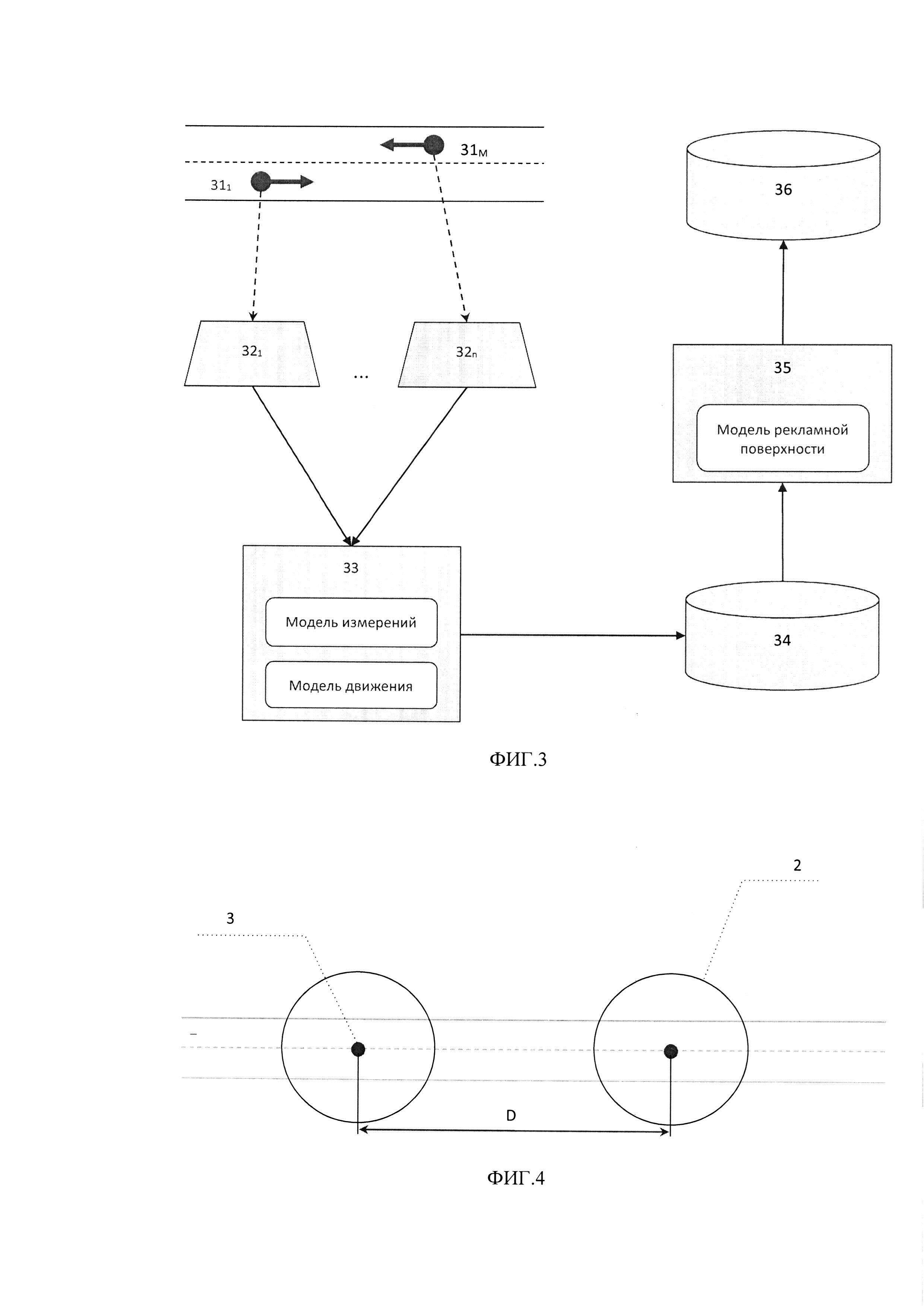
На фиг. 3 приведена блок-схема системы, которая может использоваться для реализации способа.
На фиг. 4 схема возможного размещения средств сканирования удаленно друг от друга.
Предпочтительные варианты осуществления изобретения
В основе предлагаемого способа измерения контактов с рекламными носителями лежит оценка положения и движения потенциальных потребителей рекламы, полигонов видимости рекламной поверхности, а также определение пересечения линии движения потребителя с полигоном области видимости рекламной поверхности.
Идентификатором определенного пользователя можно считать либо уникальные идентификаторы ассоциированных с ним объектов - находящегося при нем мобильного устройства, транспортного средства, - либо данные, которые позволяют идентифицировать самого потребителя, в частности его биометрические персональные данные (данные его внешности).
Уникальным идентификатором мобильного устройства является, например, МАС-адрес, регистрируемый с помощью беспроводных сканирующих устройств, например, Wi-Fi роутеров. Уникальным идентификатором транспортного средства может являться, например, государственный регистрационный номерной знак, который фиксируется средствами фото- и видеонаблюдения. Аналогично, в настоящее время получают все большее распространение и применение системы распознавания, использующие для идентификации людей их внешность, в том числе лицо, походку и иные характерные особенности. Соответственно, в рамках настоящего изобретения под средствами сканирования понимаются такие беспроводные сканирующие устройства (роутеры), средства фото и видеонаблюдения, а также системы распознавания в зависимости от того, какие наблюдаемые объекты и соответствующие им уникальные идентификаторы используются при осуществлении способа.
Способ далее основывается на регистрации объектов наблюдения, связанных с аудиторией, и определении местоположения пользователя в различные моменты времени. При этом регистрация факта нахождения объекта наблюдения (например, мобильного устройства с определенным МАС-адресом) вблизи рекламной поверхности сама по себе не означает, что пользователь находится в зоне видимости рекламной поверхности, в связи с чем возникает задача уточнения его положения относительно носителя.
В заявленном способе предлагается, во-первых, регистрировать не только объект наблюдения (т.е. факт его нахождения в зоне работы сканирующего устройства), но и получать данные о его положении и перемещении относительно средства сканирования (данные о состоянии). Реальные параметры положения и движения наблюдаемого объекта могут быть описаны набором значений географических координат (широта LAT, долгота LNG положения), азимутом направления его движения (А), а также скоростью движения вдоль направления азимута (V), определенных на момент времени Т. Вектор состояния (положения и движения) может, таким образом, иметь вид X=[Т, LAT, LNG, А, V]. Однако, поскольку измерения являются косвенными к состоянию, а также из-за слишком большого количества ненаблюдаемых факторов, влияющих на измерения, при реализации способа целесообразно использовать вероятностный аппарат для описания модели измерений.
Для случая, когда объектом наблюдения является мобильное устройство, исходные данные измерений могут представлять собой массив вида Yij=[monitor1, macj, t, rssi], где monitor - идентификатор сканирующего устройства (роутера), mac - МАС-адрес мобильного устройства пользователя, t - время регистрации сигнала мобильного устройства, rssi - сила принятого сигнала. В данном случае идентификатор роутера (местоположение которого задано и известно) и параметр силы принятого роутером сигнала будут определять данные о положении устройства с определенным МАС-адресом в момент времени t. Указанный набор данных позволяет наиболее простым способом регистрировать большинство мобильных устройств с включенным Wi-Fi модулем. Специалисту понятно, что массив данных измерений может дополняться и уточняться, при этом для других объектов наблюдения исходные данные измерений будут подвергаться соответствующим модификациям. В частности, вместо МАС-адреса мобильного устройства в массив может быть включен регистрационный номер транспортного средства numberj или уникальный биометрический дескриптор facej, рассчитанный системой распознавания внешности (например, лица), а вместо силы сигнала rssi может учитываться дистанция до наблюдаемого объекта disti, определенная с помощью средств фото-видеонаблюдения.
Вероятностная модель измерений может быть задана через плотность вероятностей P(Y|X) - условная вероятность получить вектор измерения Y при каждом из возможных состояний X. Далее, с использованием заданной плотности можно строить оценку состояния, например, методом максимума правдоподобия - X*=argmax_X(Р(у|Х)), либо оценивать полное распределение вектора состояния используя Байесовский подход Р(Х|у)=Р(у|Х)*Р(Х)/Р(у).
На фиг. 1 приведен пример схемы размещения средств сканирования - Wi-Fi роутеров для наблюдения за мобильными устройствами, а также пример простейшей модели измерений и построения оценки вектора состояния на ее основе.
В точке 1 располагаются два средства сканирования (роутера) с направленными антеннами. Как известно из теории радиолокации, принимающие и передающие свойства антенн характеризуются их диаграммой направленности. Для реализации способа могут использоваться различные антенны, в том числе с направленной и ненаправленной антенной. Выбор типа антенны, а также ее принимающего свойства (то есть выбор характера диаграммы направленности) зависит от физических условий, и от характера измеряемого потока наблюдаемых объектов. Например, при измерении положения и перемещения в автотранспортном потоке с явно выраженным направленным движением вдоль узкой полосы предпочтительно использовать узкие диаграммы направленности, а также ориентировать их вдоль движения потока навстречу потоку, так и по движению. А для случая измерения потока без явно выраженного направленного движения может использоваться антенна с круговой диаграммой направленности. Приведенные рекомендации по выбору типа антенны и способа размещения сканирующего оборудования увеличивают качество выделения потока, но не являются обязательными. Способ также предполагает обработку схемы размещения, в том числе, одиночных единиц сканирующего оборудования с ненаправленной антенной, при том, что точки установки оборудования могут быть разнесены на несколько сотен метров, и даже километров (фиг. 4).
В описываемом примере используются направленные антенны, максимальное усиление которых ориентировано под острым углом по ходу и против хода предполагаемого движения потока наблюдаемых объектов (например, автомобилей).
На основе географических координат точки установки роутера (точка 1 на 15 фиг. 1), а также азимута ориентации и эффективной дальности направленной антенны, для каждой антенны (2 на фиг. 1) вычисляется точка (3 на фиг. 1) положения, для которой вероятность фиксации идентификатора наблюдаемого объекта (например, МАС-адреса пользователя мобильного устройства) соответствующим сканирующим устройством максимальна. Далее, измерения с каждого средства сканирования дополняются вычисленными географическими координатами (mLAT, mLNG) наиболее вероятной точки, и получается расширенный вектор измерений: [monitorj, macj, tj, rssij, mLATj, mLNGj].
Далее, имея набор измерений с разных устройств сканирования, возможно вычислить оценку вектора состояния (положения и параметров движения) X*=[Т*, LAT*, LNG*, A*, L*]. В качестве примера вычисления оценок положения и параметров движения рассмотрим набор из двух измерений от двух устройств сканирования (по одному измерению с каждого устройства сканирования):
[monitor1, mac1, t1, rssi1, mLAT1, mLNG1] и [monitor2, mac2, t2, rssi2, mLAT2, mLNG2]
Тогда оценки могут быть вычислены по следующим формулам:
Т*=(t2-t1)/2
LAT*=(mLAT1+mLAT2)/2
LNG*=(mLNG1+mLNG2)/2
A*=arctan((mLNG2-mLNG1)/(mLAT2-mLAT1)), если t2>t1
или arctan((mLNG1 - mLNG2)/(mLAT1-mLAT2)), если t1>t2
L*=D/abs(t2-t1), где D - метровое расстояние между точками (mLAT1, mLNG1) и (mLAT2, mLNG2).
Отдельные компоненты вектора состояния могут уточняться за счет использования сторонних источников данных. Например, для уточнения оценки скорости движения может быть использована средняя скорость движения потока в обоих направлениях для каждого момента времени, полученная по предварительной договоренности от стороннего источника измерений (например, от сервиса Яндекс.Карты и т.п.).
В случае, если на основе имеющихся данных часть оценок построить затруднительно, возможно использование исторических данных по конкретному объекту наблюдения для построения вероятностных оценок. Например, если в силу неполноты данных имеется только одно измерение по конкретному наблюдаемому объекту [monitor1, mac1, t1, rssi1, mLAT1, mLNG1], то невозможно оценить азимут направления движения, так как не ясно в какую сторону двигался наблюдаемый объект. В таком случае можно проанализировать исторические данные на предмет появления регулярного паттерна. Так, если данный объект наблюдается регулярно, и в одно и то же время дня в другие дни было определено направление в одну и ту же сторону, правомерно предположить (с определенной долей допущения), что в данный день он также двигается в ту же сторону.
В результате на основе набора измерений, а также дополнительной информации из сторонних источников вычисляется оценка положения наблюдаемого объекта, направление и скорость его движения для определенного момента времени X*=[Т*, LAT*, LNG*, A*, L*].
Описанный подход предполагает построение точечной оценки вектора состояния X. Также возможен более комплексный подход, при котором оценивается вся плотность распределения вектора состояния, а также может легко масштабироваться и обобщаться на произвольное количество средств сканирования N, а также расширяться для нескольких направлений движения.
После получения оценки вектора состояния, то есть географических координат, азимута и скорости движения объекта наблюдения в момент времени Т*, используя модель движения можно получать оценки состояния объекта (положения и скорости) для произвольных интересующих моментов времени t. Либо наоборот, получить моменты времени нахождения объекта наблюдения в интересующих точках вдоль траектории его движения. В простейшем случае моделью движения объекта является модель прямолинейного движения с постоянной скоростью (для небольших отклонений интересующего момента времени t от оценочного Т* погрешность такой модели несущественна). В качестве более сложной модели движения для конкретных местностей можно использовать модели, базирующиеся на анализе графа перемещения (людей, транспортных средств) на этой местности, учитывающие сложную геометрию дорожных развязок и специфику дорог, а также скорость движения по различным участкам.
На фиг. 2 показан пример построения сессии объекта, движущегося по автомобильной дороге с установленным на ней рекламным носителем 5.
Для любых носителей наружной рекламы характерна некоторая область 6 в окружающем пространстве, из которой возможен визуальный контакт потребителей с рекламной поверхностью. В простейшем случае область 6 может быть представлена в качестве кругового сектора, а более сложном - шарового сектора с центром в месте расположения рекламного носителя. Параметры области видимости (радиус сектора, длина дуги) могут варьироваться в частных случаях и зависят от особенностей рельефа местности, застройки, а также характеристик расположения рекламной конструкции, в т.ч. азимута ориентации рекламной поверхности, высоты ее расположения относительно земли, угла обзора и максимальной дальности видимости. С учетом указанных характеристик область 6 видимости может быть определена в географических координатах для каждого рекламного носителя.
Определив оценку положения X* наблюдаемого объекта с определенным идентификатором (например, МАС-адресом мобильного устройства) для некоторого момента времени Т* и используя заданную модель движения (в частном случае - прямолинейное движение с постоянной скоростью) можно определить траекторию движения объекта - линию его перемещения, которая может иметь или не иметь пересечения с областью 6 видимости рекламного носителя. Если пересечение имеет место, известными численными методами могут быть определены точки Х0 и X1 входа и соответственно выхода объекта наблюдения из области 6 видимости, а также соответствующие моменты времени t0 входа и t1 выхода, которые определяют сессию нахождения объекта наблюдения в области видимости рекламного носителя и могут быть приняты за сессию возможного контакта с рекламной поверхностью.
На фиг. 3 показана схема программно-аппаратного комплекса, с помощью которого возможна реализация заявленного способа, в котором в качестве наблюдаемых объектов выбраны мобильное устройства. Для измерения положения наблюдаемых объектов 311 … 31M используют множество Wi-Fi сканирующих устройств 321 … 32N (М и N - натуральные числа). В случае использования у сканеров направленных антенн они ориентируются вдоль линии движения потока (например, вдоль дороги), чтобы регистрировать наибольшее количество сигналов с дороги и минимизировать захват соседних областей. Для локаций, не предполагающих явно выраженное направленное движение (например, рекламная инсталляция в парке) может быть использована антенна с круговой диаграммой направленности.
На основе данных о диаграмме направленности антенны задаются параметры сканирующих устройств 32, в частности для каждого сканирующего устройства указывается вид диаграммы направленности, азимут ориентации оси максимального усиления (для случая направленной антенны), географические 30 координаты положения сканирующего устройства, а также дальность приема сигнала согласно диаграмме направленности антенны, определяемая на основе мощности антенны.
Сканирующие устройства 32 измеряют параметры положения наблюдаемых объектов (массив данных Y как описано ранее) и посредством проводных и/или беспроводных каналов связи передают результаты измерений в центр (или центры) обработки данных 33, где на основе выбранных моделей измерений и движения оценивают параметры X* положения и движения наблюдаемых объектов в моменты времени t*. Результаты оценки хранятся в базах данных 34 и передаются в центр обработки 35 для дальнейшей оценки сессий контактов наблюдаемых объектов (заранее или впоследствии ассоциированных с потенциальными потребителями рекламы) с рекламными поверхностями на основе заданных параметров зон видимости рекламных носителей. Результаты оценки контактов с рекламными носителями могут храниться отдельно от результатов измерений и оценки перемещений объектов (например, в базе данных 36), что позволяет использовать накопленные исторические данные из базы данных 34 о положении и движении наблюдаемых объектов для оценки контактов с рекламными поверхностями, которые ранее не учитывались.
Все вышеописанные примеры осуществления изобретения приведены только для лучшего понимания его сущности и не должны рассматриваться в качестве ограничивающих объем притязаний, который полностью определяется только прилагаемой формулой изобретения.
Способ определения нерадиальной проекции вектора скорости цели
Способ определения нерадиальной проекции вектора скорости цели
Цифровой модем командной радиолинии цм крл
Способ измерения плавающего потенциала в плазме
Способ измерения потенциала плазмы
Цифровой модем информационной радиолинии цм ирл
Способ утилизации твердых бытовых отходов (тбо) с использованием технологии двойного капсулирования, обеспечивающей 100% экологически чистую утилизацию тбо
Бортовая радиоаппаратура летательных аппаратов
Способ построения системы видеонаблюдения для поиска и отслеживания объектов

