Результат интеллектуальной деятельности: ПЫЛЕСОС
Вид РИД
Изобретение
[0001] Данное изобретение относится к пылесосу.
УРОВЕНЬ ТЕХНИКИ
[0002] В общем случае, пылесосы – это устройства, которые всасывают пыль или инородные вещества, рассеянные на поверхности, подлежащей очистке, за счет использования вакуумного исполнительного механизма, установленного в корпусе, для фильтрации пыли или инородных веществ в корпус.
[0003] Такие пылесосы можно подразделить главным образом на вертикальные пылесосы, в которых всасывающий насадок, образующий всасывающее отверстие, выполнен как единое целое с корпусом, и канистровые пылесосы, в которых всасывающий насадок сообщается с корпусом посредством соединительной трубки.
[0004] В корейском патенте рег.№ 10–1684072, являющемся известным документом, предложен пылесос.
[0005] Пылесос, предложенный в известном документе, включает в себя корпус пылесоса, включающий в себя движущий блок, всасывающее устройство для всасывания воздуха, обнаруживающее устройство для обнаружения движения всасывающего устройства и контроллер, управляющий движущим блоком на основе информации, обнаруживаемой обнаруживающим устройством, когда необходимо движение корпуса пылесоса.
[0006] Обнаруживающее устройство включает в себя блок передачи ультразвуковых волн, предусмотренный в ручке, и блок приема ультразвуковых волн, предусмотренный в корпусе пылесоса.
[0007] Вместе с тем, поскольку в соответствии с известным документом блок передачи ультразвуковых волн предусмотрен в ручке, ультразвуковые волны, передаваемые из источника ультразвуковых волн, могут искажаться потребителем или мешать ему, когда потребитель находится между ручкой и корпусом, и поэтому ультразвуковые волны не могут достигать блока приема ультразвуковых волн. В результате, хотя ручка отдалена от корпуса пылесоса, корпус пылесоса к ручке не движется.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0008] В данном изобретении предложен пылесос, в котором присущая датчику погрешность измерения снижена, чтобы позволить корпусу пылесоса точно следовать за ручкой.
[0009] В данном изобретении предложен пылесос, в котором корпус пылесоса следует за ручкой, используя недорогой датчик.
[0010] В данном изобретении предложен пылесос, в котором движение корпуса пылесоса к ручке предотвращается в состоянии, в котором ручка находится на полу.
[0011] В данном изобретении предложен пылесос, в котором корпус пылесоса способен изменять направление за счет обнаружения направления движения ручки.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
[0012] Пылесос включает в себя: корпус пылесоса, включающий в себя колесо для движения и электродвигатель колеса для привода колеса; всасывающий шланг, соединенный с корпусом пылесоса; ручку, соединенную со всасывающим шлангом; по меньшей мере, один обнаруживающий датчик, расположенный во всасывающем шланге, для обнаружения наклона всасывающего шланга; и контроллер, управляющий электродвигателем колеса на основе наклона всасывающего шланга, обнаруживаемого упомянутым, по меньшей мере, одним обнаруживающим датчиком.
ПОЛЕЗНЫЕ ЭФФЕКТЫ
[0013] В соответствии с данным изобретением, присущая датчику погрешность измерения снижена, чтобы позволить корпусу пылесоса точно следовать за ручкой.
[0014] Корпус пылесоса может следовать за ручкой, используя недорогой датчик.
[0015] Движение корпуса пылесоса к ручке предотвращается в состоянии, в котором ручка находится на полу, поскольку пылесос может обнаруживать состояние ручки, «сидящей» на полу.
[0016] Корпус пылесоса способен изменять направление за счет обнаружения направления движения ручки, и это позволяет корпусу пылесоса точно следовать за ней.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
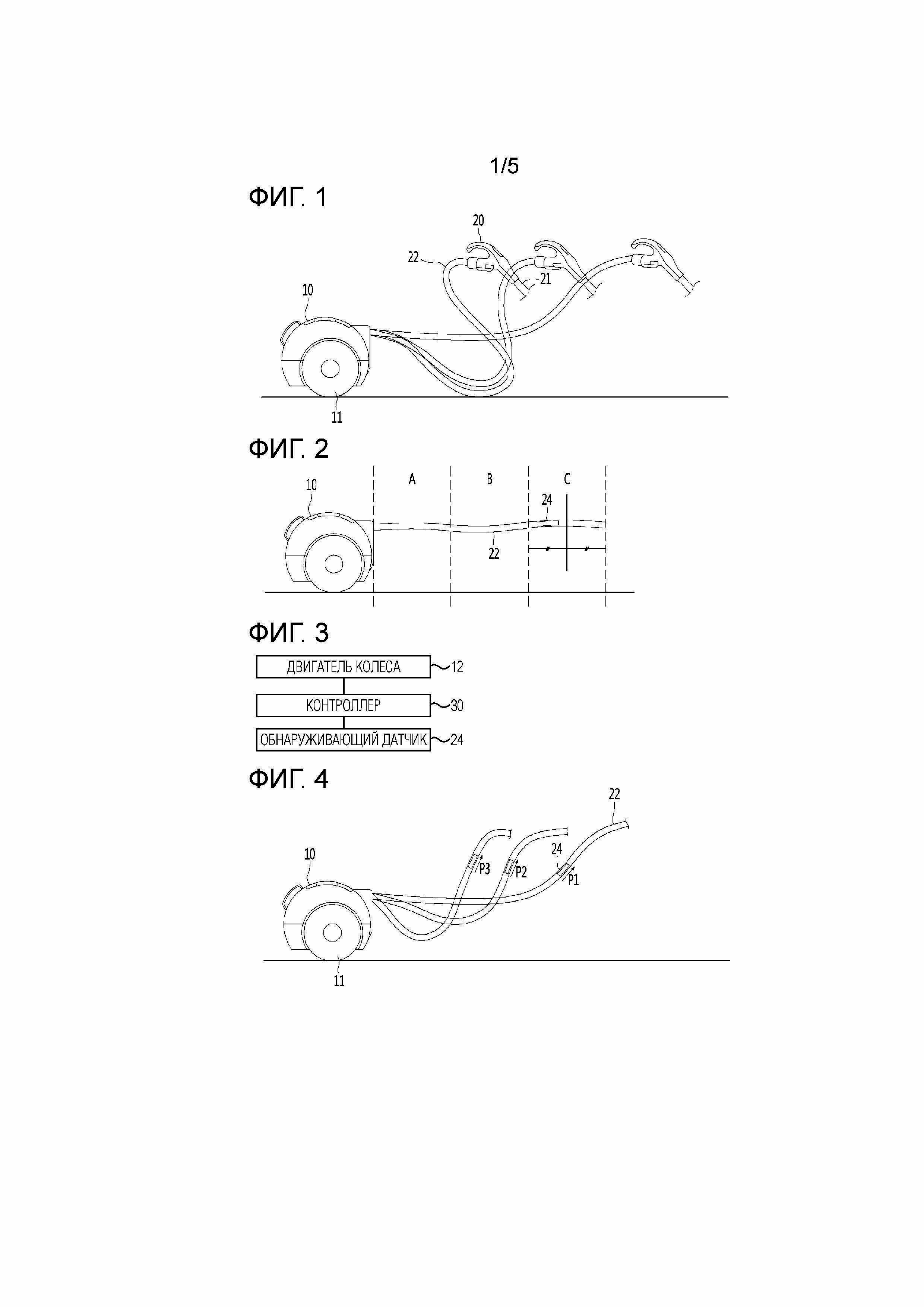
[0017] На фиг.1 представлено перспективное изображение пылесоса в соответствии с первым вариантом осуществления. На фиг.2 представлен вид, иллюстрирующий состояние, в котором обнаруживающий датчик установлен во всасывающем шланге пылесоса согласно фиг.1.
[0018] На фиг.3 представлена блок–схема пылесоса согласно фиг.1.
[0019] На фиг.4 представлено вид, иллюстрирующий состояние, в котором положение обнаруживающего датчика изменяется во время операции очистки посредством пылесоса.
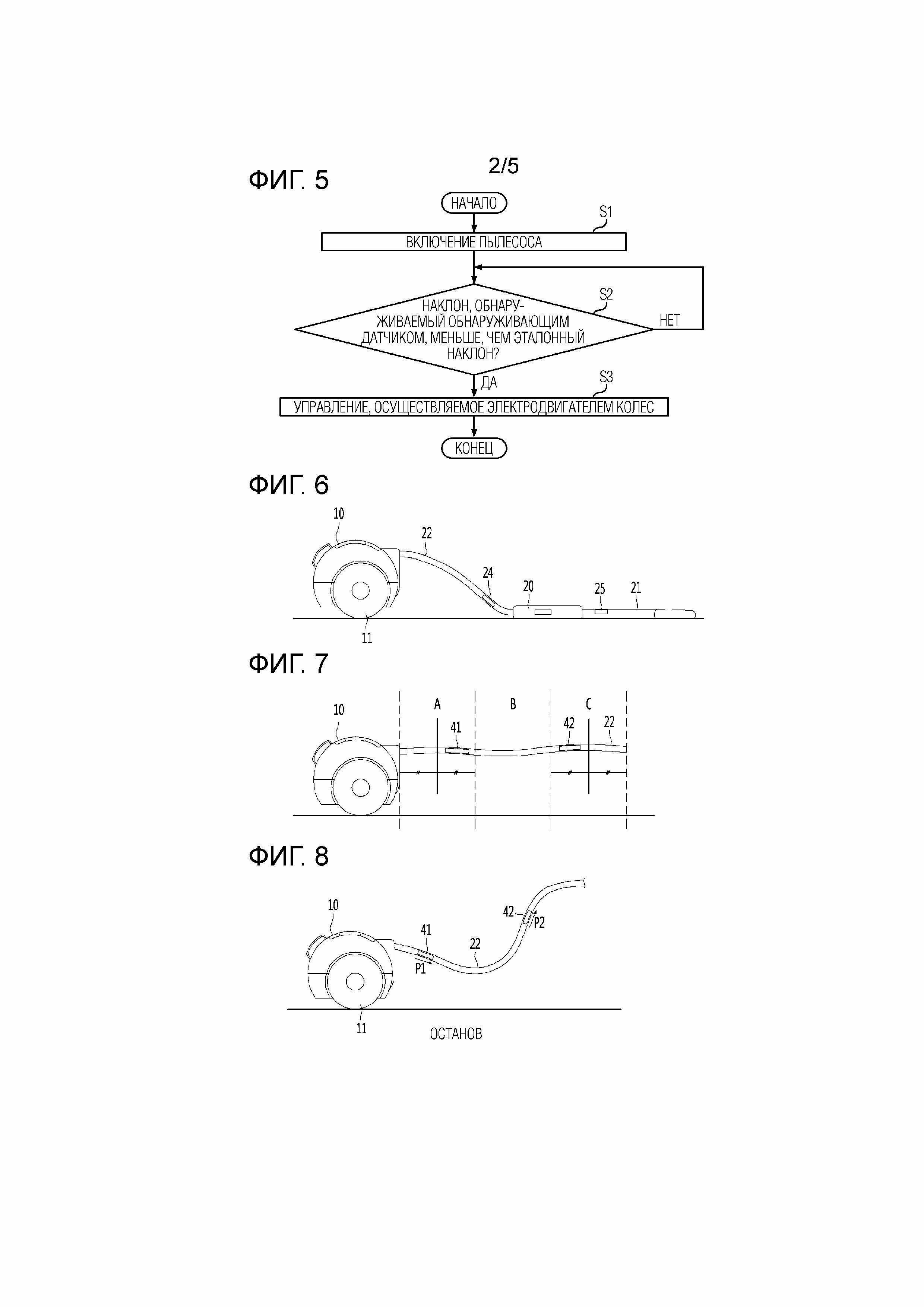
[0020] На фиг.5 представлена блок–схема последовательности операций для пояснения способа управления пылесосом согласно фиг.1.
[0021] На фиг.6 представлено перспективное изображение пылесоса в соответствии со вторым вариантом осуществления.
[0022] На фиг.7 представлен вид пылесоса в соответствии с третьим вариантом осуществления.
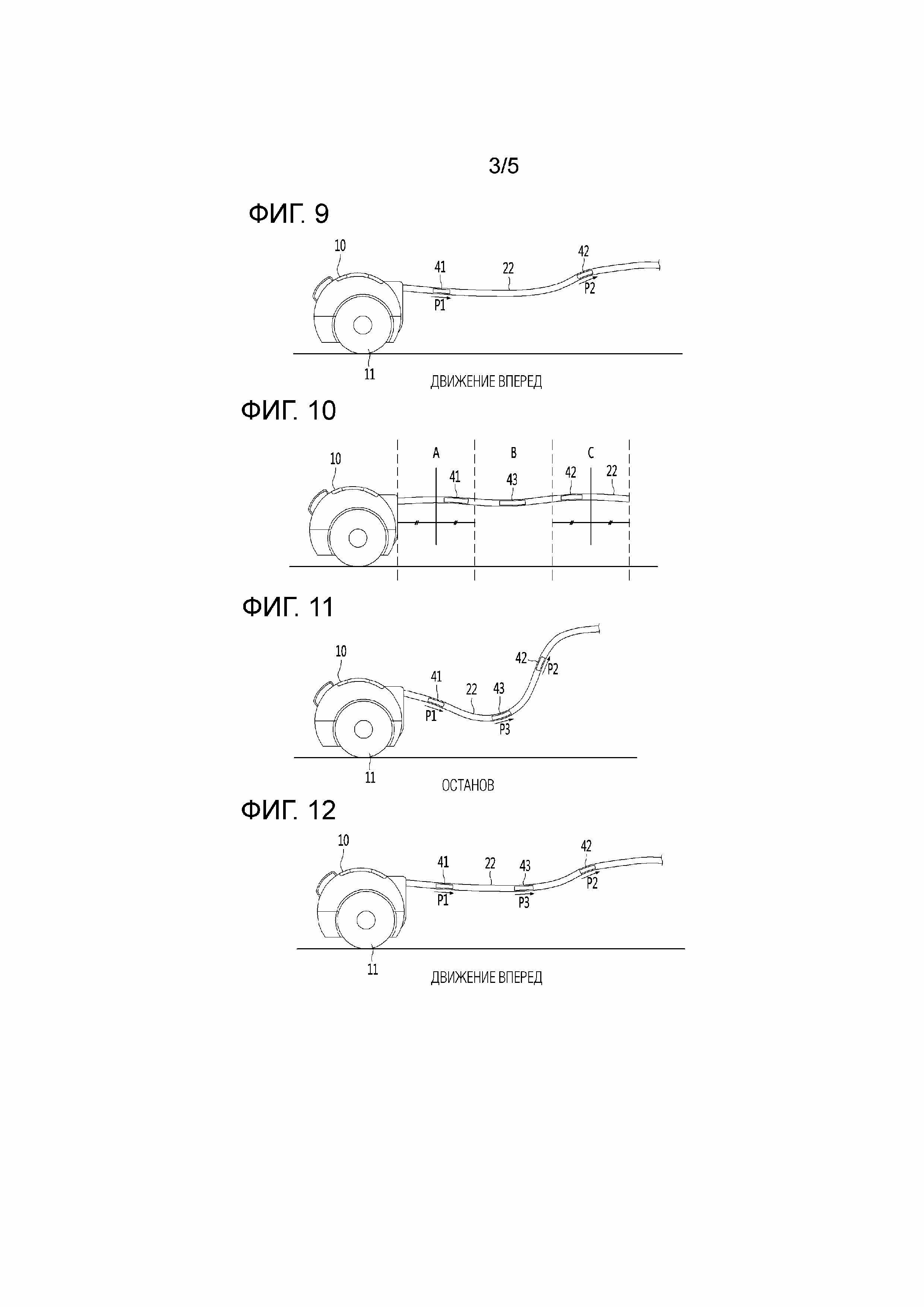
[0023] На фиг.8 и 9 представлены виды, иллюстрирующие работу пылесоса в зависимости от наклона всасывающего шланга пылесоса согласно фиг.7.
[0024] На фиг.10 представлен вид пылесоса в соответствии с четвертым вариантом осуществления.
[0025] На фиг.11 и 12 представлены виды, иллюстрирующие работу пылесоса в зависимости от наклона всасывающего шланга пылесоса согласно фиг.10.
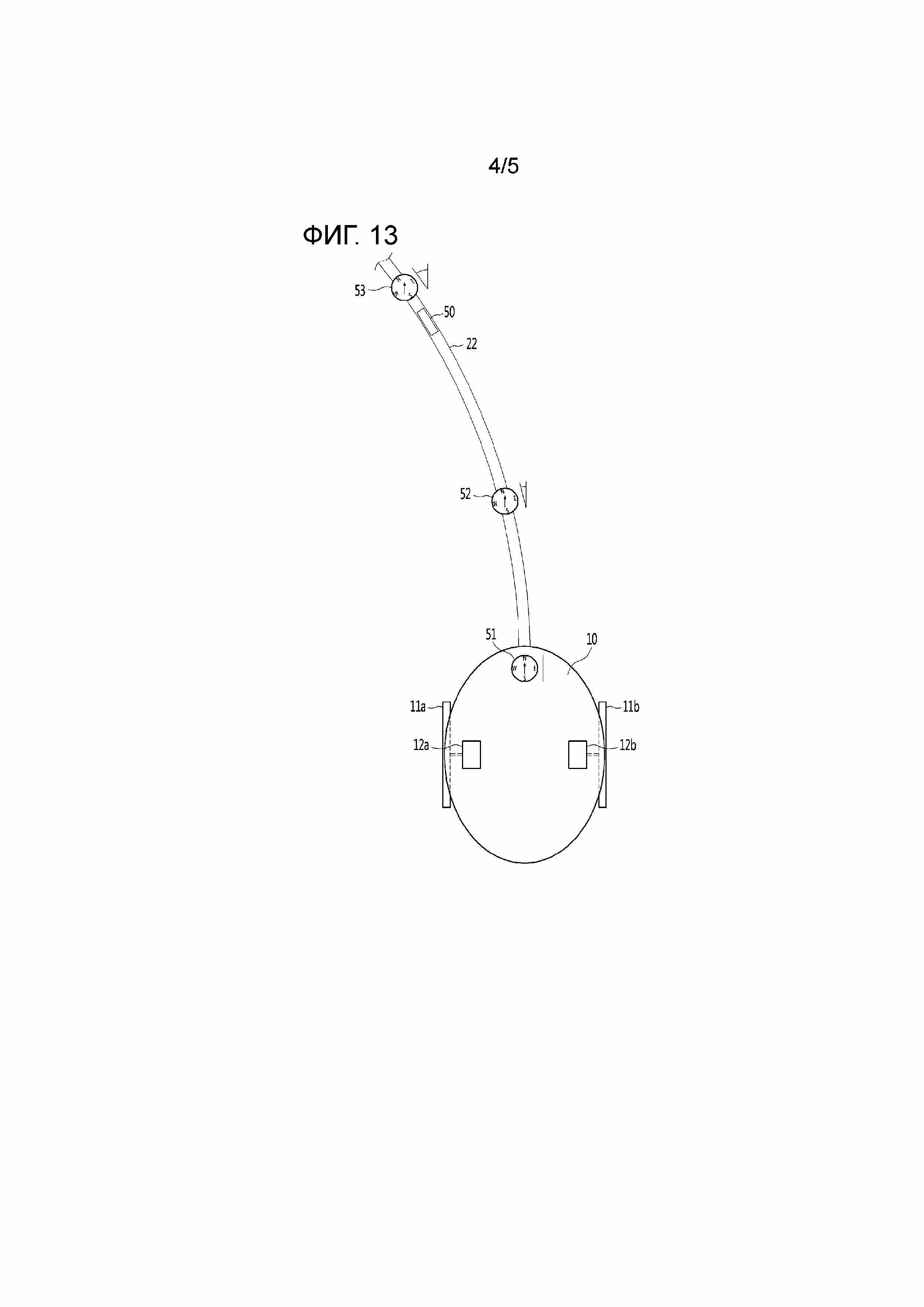
[0026] На фиг.13 представлен вид пылесоса в соответствии с пятым вариантом осуществления.
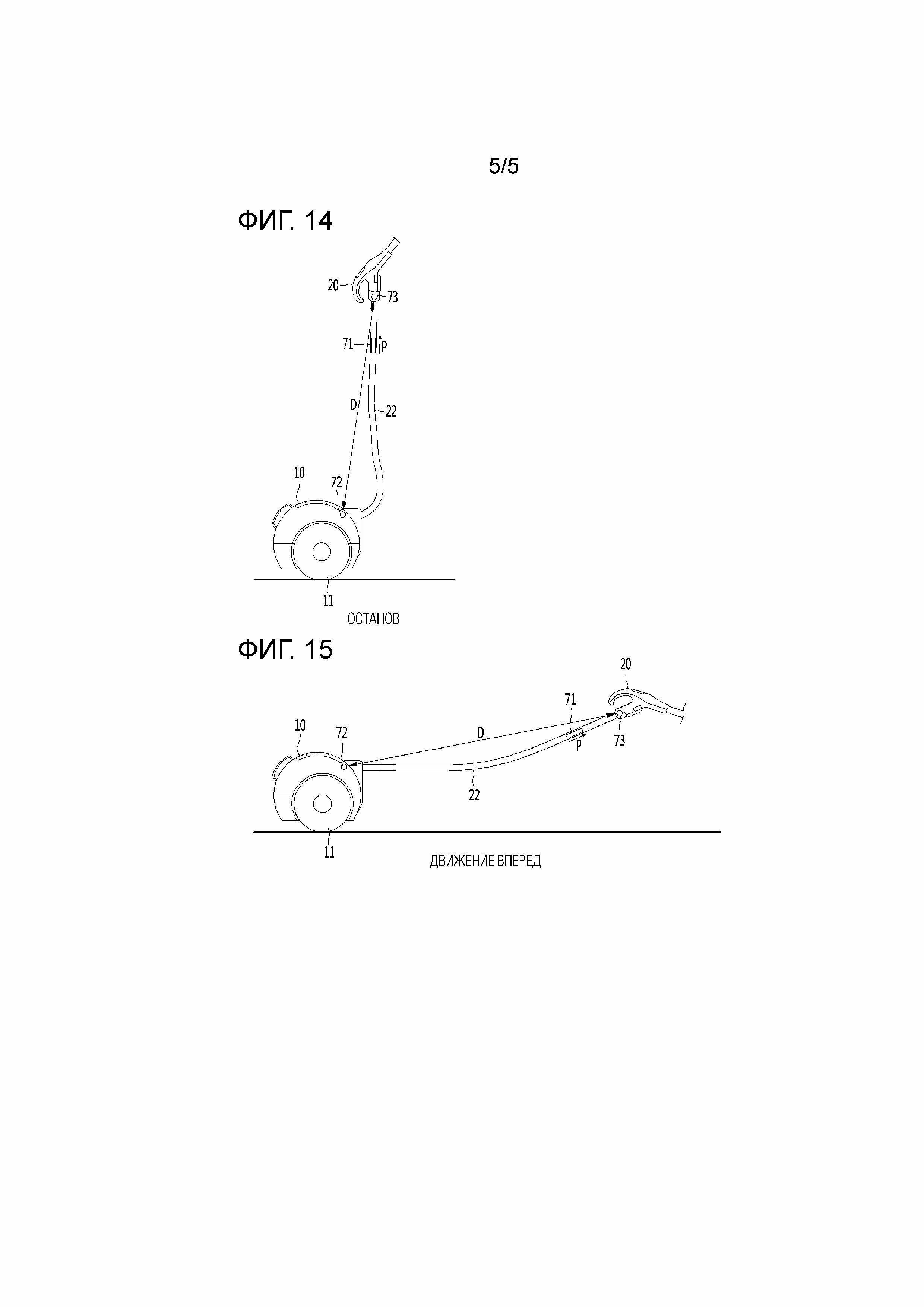
[0027] На фиг.14 и 15 представлены виды пылесоса в соответствии с шестым вариантом осуществления.
СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0028] На фиг.1 представлено перспективное изображение пылесоса в соответствии с первым вариантом осуществления. На фиг.2 представлен вид, иллюстрирующий состояние, в котором обнаруживающий датчик установлен во всасывающем шланге пылесоса согласно фиг.1, а на фиг.3 представлена блок–схема пылесоса согласно фиг.1.
[0029] Обращаясь к фиг.1—3, отмечаем, что пылесос в соответствии с первым вариантом осуществления может включать в себя корпус 10 пылесоса, включающий в себя вакуумный исполнительный механизм, всасывающий шланг 22, соединенный с корпусом 10 пылесоса, ручку 20, соединенную со всасывающим шлангом 22, и удлинительную трубку 21, соединенную с ручкой 20. Удлинительная трубка 21 может быть соединена с насадком (не показан) для всасывания воздуха, находящегося на полу.
[0030] В качестве всасывающего шланга 22 можно использовать шланг, изготовленный из гибкого материала, деформируемого по форме.
[0031] Корпус 10 пылесоса может включать в себя множество колес 11 для движения корпуса 10 пылесоса, множество электродвигателей 12 колес для соответственного вращения множества колес 11, обнаруживающий датчик 24, установленный во всасывающем шланге 22, и контроллер 30, управляющий множеством электродвигателей 12 колес на основе информации, обнаруживаемой обнаруживающим датчиком 24.
[0032] Обнаруживающий датчик 24 может быть, например, датчиком ускорения, 6–тиосным датчиком, или 9–тиосным датчиком. При любом типе датчика, обнаруживающий датчик 24 может обнаруживать наклон всасывающего шланга 22 относительно пола (или наклон всасывающего шланга относительно направления силы тяжести).
[0033] Обнаруживающий датчик 24 может осуществлять беспроводную или проводную связь с контроллером 30.
[0034] Обнаруживающий датчик 24 может быть расположен во всасывающем шланге 22 ближе к ручке 20, чем корпус 10 пылесоса.
[0035] Например, длина всасывающего шланга 22 может быть разделена на три части, чтобы ограничить три секции A—C.
[0036] Секция A может располагаться близко к корпусу 10 пылесоса, секция C может располагаться близко к ручке 20, а секция B может быть ограничена между секцией A и секцией C.
[0037] Обнаруживающий датчик 24 может находиться в секции C всасывающего шланга 22, так что изменение наклона, обнаруживаемое обнаруживающим датчиком 24, во время операции очистки пылесосом увеличивается. Как изображено на фиг.1, при изменении расстояния между ручкой 20 и корпусом 10 пылесоса, наклон участка всасывающего шланга 22, примыкающий к ручке 20, может изменяться.
[0038] Таким образом, когда обнаруживающий датчик 24 устанавливают в секции C всасывающего шланга 22, которая примыкает к ручке 20, изменение наклона всасывающего шланга 22, обнаруживаемое обнаруживающим датчиком 24, может быть большим для точного обнаружения положения ручки 20 корпуса 10 пылесоса.
[0039] В частности, когда длину секции C делят на равные участки, обнаруживающий датчик 24 может быть установлен на участке секции C, который примыкает к секции B.
[0040] Поскольку в случае участка секции C, который непосредственно соединен с ручкой 20, изменение наклона во время очистки является относительно малым, предпочтительно располагать обнаруживающий датчик 24 на участке секции C, который примыкает к секции B.
[0041] Далее будет описана работа пылесоса.
[0042] На фиг.4 представлен вид, иллюстрирующий состояние, в котором положение обнаруживающего датчика время операции очистки пылесосом изменяется, а на фиг.5 представлена блок–схема последовательности операций для пояснения способа управления пылесосом согласно фиг.1.
[0043] Обращаясь к фиг.4 и 5, отмечаем, что пылесос включают (S1) для возбуждения вакуумного исполнительного механизма. Затем потребитель осуществляет очистку, перемещая насадок относительно пола с помощью ручки 20.
[0044] При осуществлении очистки, расстояние между корпусом 10 пылесоса и ручкой 20 может изменяться, как изображено на фиг.1 и 4. Когда ручку 20 отводят от корпуса 10 пылесоса, всасывающий шланг 22 может подвергаться воздействию механического напряжения. Таким образом, наклон всасывающего шланга 22 относительно пола, обнаруживаемый обнаруживающим датчиком 24, может уменьшаться.
[0045] Контроллер 30 определяет (S2), меньше ли наклон всасывающего шланга 22, обнаруживаемый обнаруживающим датчиком 24, чем эталонный наклон.
[0046] Если наклон всасывающего шланга 22, обнаруживаемый обнаруживающим датчиком 24, меньше, чем эталонный наклон, как определено в результате операции S2, то определяют, что ручка 20 отведена от корпуса 10 пылесоса, для управления (S3) электродвигателями 12 колес.
[0047] Например, контроллер 30 может управлять электродвигателями 12 колес так, что корпус 10 пылесоса будет двигаться вперед.
[0048] В данном случае, контроллер 30 может управлять каждым из электродвигателей 12 колес так, что электродвигатель 12 колеса остановится, проработав в течение некоторого предварительно определенного времени или совершив заранее определенное количество оборотов. В альтернативном варианте, когда наклон всасывающего шланга 22, обнаруживаемый обнаруживающим датчиком 24, превышает наклон, при котором останавливается двигатель, контроллер 30 может управлять электродвигателями 12 колес с целью их останова.
[0049] В соответствии с этим вариантом осуществления, поскольку обнаруживающий датчик относительно недорог по сравнению с блоком передачи ультразвуковых волн и блоком приема ультразвуковых волн, корпус пылесоса может следовать за ручкой, а издержки при этом невелики.
[0050] Кроме того, даже если потребитель располагается между ручкой и корпусом пылесоса, ошибка обнаружения посредством обнаруживающего датчика возникать не может, и поэтому корпус пылесоса может точно следовать за ручкой.
[0051] На фиг.6 представлено перспективное изображение пылесоса в соответствии со вторым вариантом осуществления.
[0052] Этот вариант осуществления является таким же, как первый вариант осуществления, за исключением того, что в удлинительной трубке предусмотрен дополнительный обнаруживающий датчик. Поэтому ниже будут описаны только отличающиеся части в этом варианте осуществления.
[0053] Обращаясь к фиг.1 и 6, отмечаем, что в пылесосе, соответствующем этому варианту осуществления, во всасывающем шланге 22 может быть предусмотрен обнаруживающий датчик 24 (или первый обнаруживающий датчик), а в удлинительной трубке 21 может быть предусмотрен дополнительный обнаруживающий датчик 25 (или второй обнаруживающий датчик).
[0054] Положение обнаруживающего датчика 24 при установке является таким же, как положение обнаруживающего датчика 24 в соответствии с первым вариантом осуществления.
[0055] Дополнительный обнаруживающий датчик 25 можно использовать для обнаружения состояния, в котором ручка 20 находится на полу во время очистки.
[0056] Когда очистку осуществляют в состоянии захвата ручки 20, как изображено на фиг.1, угол между удлинительной трубкой 21 и полом можно поддерживать в пределах некоторого предварительно определенного диапазона углов безотносительно расстояния между ручкой 20 и корпусом 10 пылесоса.
[0057] Как описано выше, в этом состоянии электродвигателями 12 колес можно управлять в соответствии с наклоном всасывающего шланга 22, что позволяет корпусу 10 пылесоса двигаться, следуя за ручкой 20.
[0058] Как изображено на фиг.6, потребитель может положить ручку 20 на пол во время очистки. В этом состоянии наклон всасывающего шланга 22 может быть меньше, чем эталонный наклон. Вместе с тем, как изображено на фиг.6, поскольку состояние, в котором ручка 20 положена на пол, это состояние, в котором потребитель не осуществляет очистку, движение корпуса 10 пылесоса к ручке 20 оказывается необязательным.
[0059] Таким образом, хотя в этом варианте осуществления всасывающий шланг 22 имеет наклон, меньший, чем эталонный наклон, когда наклон удлинительной трубки 21, обнаруживаемый дополнительным обнаруживающим датчиком 25, установленным в удлинительной трубке 21, меньше, чем эталонный наклон, корпус 10 пылесоса можно поддерживать в остановленном состоянии, не управляя электродвигателями 12 колес.
[0060] В соответствии с этим вариантом осуществления, состояние, в котором ручка 20 размещена на полу, можно обнаружить. В этом состоянии корпус 10 пылесоса может быть остановлен, чтобы предотвратить необязательное движение корпуса 10 пылесоса.
[0061] На фиг.7 представлен вид пылесоса в соответствии с третьим вариантом осуществления, а на фиг.8 и 9 представлены виды, иллюстрирующие работу пылесоса в зависимости от наклона всасывающего шланга пылесоса согласно фиг.7.
[0062] Этот вариант осуществления является таким же, как первый вариант осуществления, за исключением количества обнаруживающих датчиков. Поэтому ниже будут описаны только отличающиеся части в этом варианте осуществления.
[0063] Обращаясь к фиг.3, 7—9, отмечаем, что в соответствии с этим вариантом осуществления во всасывающем шланге 22 можно предусмотреть первый обнаруживающий датчик 41 и второй обнаруживающий датчик 42.
[0064] Первый обнаруживающий датчик 41 и второй обнаруживающий датчик 42 можно разместить так, что они будут отстоять друг от друга в продольном направлении всасывающего шланга 22.
[0065] В частности, длину всасывающего шланга 22 можно разделить на три части, ограничивая три секции A—C.
[0066] Секция A может находиться близко к корпусу 10 пылесоса, секция C может находиться близко к ручке 20, а секция B может быть ограничена между секцией A и секцией C.
[0067] Первый обнаруживающий датчик 41 может располагаться в секции A, а второй обнаруживающий датчик 42 может располагаться в секции C.
[0068] Положение второго обнаруживающего датчика 42 в секции C может быть таким же, как положение обнаруживающего датчика 24, описанное в первом варианте осуществления.
[0069] Когда длина секции A разделена на два равных участка, первый обнаруживающий датчик 41 может быть установлен на том из этих двух участков, который примыкает к секции B.
[0070] В случае участка секции A, который непосредственно соединен с корпусом 10 пылесоса, поскольку изменение наклона во время очистки оказывается относительно малым, предпочтительно располагать первый обнаруживающий датчик 41 на участке секции A, который примыкает к секции B.
[0071] Как изображено на фиг.9, наклон, обнаруживаемый каждым из первого обнаруживающего датчика и второго обнаруживающего датчика в состоянии, в котором ручка отдалена от корпуса пылесоса, может быть меньше, чем наклон, обнаруживаемый каждым из первого обнаруживающего датчика и второго обнаруживающего датчика в состоянии, в котором ручка находится близко к корпусу пылесоса, как изображено на фиг.8.
[0072] Таким образом, когда наклон, обнаруживаемой первым обнаруживающим датчиком 41, меньше, чем первый эталонный наклон, а наклон, обнаруживаемый вторым обнаруживающим датчиком 42, меньше, чем второй эталонный наклон, контроллер 30 может управлять электродвигателями 12 колес, позволяя корпусу 10 пылесоса двигаться к ручке 20.
[0073] Когда во всасывающем шланге 22 предусмотрено множество обнаруживающих датчиков 41 и 42, контроллер 30 может определять наклон всасывающего шланга 22, используя значение угла тангажа (продольного наклона) каждого из обнаруживающих датчиков 41 и 42, и определять, положена ли ручка 20 на пол, используя значение угла крена (бокового наклона) каждого из обнаруживающих датчиков 41 и 42.
[0074] Например, ручка 20 может двигаться вертикально во время очистки, а когда ручка 20 находится на полу, она может лежать.
[0075] Поскольку в этом случае всасывающий шланг 22, соединенный с ручкой 20, скручивается, значение угла бокового наклона, по меньшей мере, одного из обнаруживающих датчиков 41 и 42, когда ручка находится на полу, может быть больше, чем значение угла бокового наклона, по меньшей мере, одного из обнаруживающих датчиков 41 и 42, когда ручка 20 располагается так, что оказывается на некоторой предварительно определенной высоте от пола. Таким образом, факт нахождения ручки 20 на полу можно установить, используя значение угла бокового наклона.
[0076] Кроме того, хотя наклон, обнаруживаемый каждым из множества обнаруживающих датчиков 41 и 42, меньше, чем эталонный наклон, если определено, что ручка 20 положена на пол, контроллер 30 может управлять электродвигателями 12 колес так, что корпус 10 пылесоса не будет двигаться к ручке 20, а окажется поддерживаемым в состоянии останова.
[0077] На фиг.10 представлен вид пылесоса в соответствии с четвертым вариантом осуществления, а на фиг.11 и 12 представлены виды, иллюстрирующие работу пылесоса в зависимости от наклона всасывающего шланга пылесоса согласно фиг.10.
[0078] Этот вариант осуществления является таким же, как третий вариант осуществления, за исключением количества обнаруживающих датчиков. Поэтому ниже будут описаны только отличающиеся части в этом варианте осуществления.
[0079] Обращаясь к фиг.10—12, отмечаем, что, в отличие от фиг.7, в секции B всасывающего шланга может быть дополнительно установлен третий обнаруживающий датчик 43.
[0080] То есть, в этом варианте осуществления, когда длина всасывающего шланга 22 разделена на три части, обнаруживающие датчики 41, 42 и 43 могут быть соответственно расположены в секциях A, B и C.
[0081] На фиг.13 представлен вид пылесоса в соответствии с пятым вариантом осуществления.
[0082] Этот вариант осуществления является таким же, как первый вариант осуществления, за исключением того, что в каждом из всасывающего шланга и корпуса пылесоса дополнительно предусмотрен магнитный датчик. Таким образом, будет приведено принципиальное описание отличающейся части в соответствии с рассматриваемым вариантом осуществления.
[0083] Обращаясь к фиг.13, отмечаем, что во всасывающем шланге 22, соответствующем этому варианту осуществления, может быть предусмотрен обнаруживающий датчик 50 для обнаружения наклона всасывающего шланга 22.
[0084] Поскольку положение обнаруживающего датчика 50 во всасывающем шланге 22 является таким же, как положение обнаруживающего датчика 24 в соответствии с первым вариантом осуществления, его подробное описание будет опущено.
[0085] В корпусе 10 пылесоса предусмотрена пара колес 11a и 11b. Вращать эту пара колес 11a и 11b можно посредством пары электродвигателей 12a и 12b колес, возбуждение которых осуществляется независимо.
[0086] В корпусе 10 пылесоса может быть предусмотрен первый магнитный датчик 51, а во всасывающем шланге 22 могут быть предусмотрены второй магнитный датчик 52 и третий магнитный датчик 53. В данном случае, третий магнитный датчик 53 можно опустить.
[0087] Хотя это и не является ограничительным признаком, второй магнитный датчик 52 может находиться на центральном участке всасывающего шланга 22, а третий магнитный датчик 53 может находиться в некотором положении рядом с ручкой 20.
[0088] С другой стороны, второй магнитный датчик 52 может находиться в любом положении всасывающего шланга 22, а третий магнитный датчиком 52 может находиться в ручке 20, удлинительной трубке 21 или насадке.
[0089] Первый магнитный датчик 51 может служить в качестве эталонного датчика.
[0090] Контроллер может определять направление движения ручки 20 на основе первого значения разности между углом, обнаруживаемым первым магнитным датчиком 51, и углом, обнаруживаемым вторым магнитным датчиком 52, и/или второго значения разности между углом, обнаруживаемым первым магнитным датчиком 51, и углом, обнаруживаемым третьим магнитным датчиком 53, используя угол, обнаруживаемый первым магнитным датчиком, как эталонный угол.
[0091] Когда ручка 20 движется в направлении влево, как изображено на фиг.13, каждое из первого значения разности и второго значения разности может быть больше, чем эталонное значение разности.
[0092] Таким образом, когда ручка 20 движется в направлении влево, как изображено на фиг.13, контроллер может управлять электродвигателями колеса так, что электродвигатель 12a левого колеса будет иметь скорость вращения, которая больше, чем скорость вращения электродвигателя 12b правого колеса, обеспечивая поворот корпуса 10 пылесоса.
[0093] Таким образом, в соответствии с этим вариантом осуществления, корпус 10 пылесоса может двигаться вперед к ручке 20, а также поворачиваться, и поэтому корпус 10 пылесоса может точно следовать за ручкой 20.
[0094] На фиг.14 и 15 представлены виды пылесоса в соответствии с шестым вариантом осуществления.
[0095] Этот вариант осуществления является таким же, как первый вариант осуществления, за исключением того, что дополнительно предусмотрен датчик расстояния. Таким образом, будет приведено принципиальное описание отличающейся части в соответствии с рассматриваемым вариантом осуществления.
[0096] Обращаясь к фиг.14 и 15, отмечаем, что во всасывающем шланге 22 в соответствии с этим вариантом осуществления может быть предусмотрен обнаруживающий датчик 71 для обнаружения наклона всасывающего шланга 22.
[0097] Поскольку положение обнаруживающего датчика 71 во всасывающем шланге 22 является таким же, как положение обнаруживающего датчика 24 в соответствии с первым вариантом осуществления, его подробное описание будет опущено.
[0098] Пылесос в соответствии с этим вариантом осуществления может дополнительно включать в себя датчики 72 и 73 расстояния для обнаружения расстояния между ручкой 20 и корпусом 10 пылесоса.
[0099] Датчики 72 и 73 расстояния могут включать в себя первый датчик 72, предусмотренный в корпусе 10 пылесоса и второй датчик 73, предусмотренный в ручке 20.
[0100] Датчики 72 и 73 расстояния могут представлять собой ультразвуковые датчики, в которых используются ультразвуковые волны, или радиочастотные датчики. В альтернативном варианте каждый из датчиков 72 и 73 расстояния может представлять собой сверхширополосный (СШП) (UWB)) датчик.
[0101] В этом варианте осуществления, когда наклон всасывающего шланга 22, обнаруживаемый обнаруживающим датчиком 71, меньше, чем эталонный наклон, а расстояние между корпусом 10 пылесоса и ручкой 20 больше, чем эталонное расстояние, контроллер может управлять электродвигателем 12 колеса так, что корпус 10 пылесоса будет двигаться к ручке 20.
[0102] Пользуясь ручкой 20, потребитель может проводить очистку на площади, имеющей большую высоту, такой, как потолок. В данном случае, как изображено на фиг.14, расстояние между корпусом 10 пылесоса и ручкой 20 может быть больше, чем эталонное расстояние, а наклон всасывающего шланга 22 может быть больше, чем эталонный наклон.
[0103] В состоянии, изображенном на фиг.14, предпочтительно, чтобы корпус 10 пылесоса не двигался. Таким образом, в этом варианте осуществления, как изображено на фиг.14, когда наклон всасывающего шланга 22 больше, чем эталонный наклон, хотя расстояние между корпусом 10 пылесоса и ручкой 20 больше, чем эталонное расстояние, корпус 10 пылесоса можно поддерживать в состоянии останова.
[0104] С другой стороны, когда ручка 20 отдалена от корпуса 10 пылесоса во время очистки, как изображено на фиг.15, расстояние между корпусом 10 пылесоса и ручкой 20 больше, чем эталонное расстояние, а наклон всасывающего шланга 22 меньше, чем эталонный наклон, как изображено на фиг.14. Таким образом, корпус 10 пылесоса может двигаться к ручке 20.
[0105] Хотя варианты осуществления описаны со ссылками на ряд иллюстративных вариантов осуществления изобретения, следует понимать, что специалисты в данной области техники смогут разработать многие другие модификации и варианты осуществления, которые будут находиться в пределах существа и объема притязаний согласно принципам этого изобретения. Конкретнее, в пределах существа и объема притязаний описания, чертежей и прилагаемой формулы изобретения возможны различные изменения составных частей и/или компоновок согласно расположению комбинации признаков. Помимо изменений и модификаций составных частей и/или компоновок, специалистам в данной области техники будут очевидны альтернативные приложения.
Способ отображения физического канала управления индикатора формата
Насос для средства для обработки белья и устройство для обработки белья, содержащее такой насос
Робот-пылесос с рч антенной
Система и способ изменения длительности таймера управления передачей пользовательской информации
Всасывающая насадка и пылесос с такой насадкой
Устройство для обработки одежды
Устройство для обработки одежды и способ изготовления двери, установленной на устройстве для обработки одежды
Устройство для обработки одежды
Способ движения робота-уборщика (варианты)
Многоциклонный уловитель

