Результат интеллектуальной деятельности: Устройство для обучения управлению подвижными объектами с помощью джойстиков
Вид РИД
Изобретение
Изобретение относится к устройствам для обучения операторов ручному управлению подвижными объектами, в частности, лесозаготовительными машинами, и качается создания и снятия усилий с рукояти манипулятора в режиме обучения.
В настоящее время известны устройства для имитации загрузки и усилий на рычагах управления различными тренажерами, главным образом, предназначенных для обучения управления летательными аппаратами, основанные на применении силовых электроприводов, механически связанных с рукоятями рычагов управления и создающих обратное перемещению этих рычагов усилие.
Известна система загрузки рычагов управления авиационного тренажера [1], включающая вычислитель и несколько (по количеству рычагов управления) исполнительных блоков загрузки, каждый из которых содержит силовой электропривод, механически связанный с рычагом управления и снабженный датчиком положения. Каждый исполнительный блок загрузки для обеспечения прямого преобразования сигнала заданного усилия в механическое усилие на рычагах управления снабжен управляемым источником тока. При этом вход вычислителя соединен с датчиком положения, а выход - с входом управляемого источника тока, выход которого соединен с силовым электроприводом. Технический результат данного способа заключается в обеспечении устойчивости и повышения качества воспроизведения усилий на рычагах управления тренажера в широком диапазоне изменения градиентов загрузки.
Известно устройство ручного управления подвижным объектом [2], содержащее корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки. Механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде двух дуг, консольно установленных на соответствующих осях вращения. Одна дуга отклоняется относительно вертикальной, а другая - относительно горизонтальной осей. Дуги механически связаны друг с другом посредством дугообразной стойки, нижний конец которой посредством вертикальной оси вращения подвижно соединен с дугой канала угла места и жестко соединен с кронштейном рукоятки, а верхний конец дугообразной стойки шарнирно соединен с помощью горизонтальной оси вращения с подвижной скобой, выполненной с возможностью скольжения в направляющем пазу дуги канала азимута. При этом вертикальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала азимута, а верхняя горизонтальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала угла места. К кронштейну рукоятки с противоположной от вертикальной оси вращения стороны закреплен балансировочный груз. Техническим результатом известного способа является повышение надежности ручки управления путем создания простых кинематических связей между механическими узлами.
Известна боковая кистевая ручка управления летательным аппаратом [3], имеющая три степени свободы и выполненная с регулировочным сборочным узлом нейтрального положения рукоятки по всем трем осям вращения, две из которых проходят через сустав кисти руки летчика, а также с регулируемыми сборочными узлами расстояния рукоятки от подлокотника ручки и от своих осей вращения. Рукоятка посредством регулируемого сборочного узла закреплена на кронштейне, закрепленном на оси одного загрузочного узла. Полученная сборка посредством другого кронштейна закреплена на оси другого загрузочного узла. Последняя сборка закреплена через кронштейн на оси третьего загрузочного узла. Все это закреплено с помощью следующего кронштейна на подлокотнике. Все загрузочные узлы имеют датчики угла поворота своих осей. Третья ось вращения рукоятки расположена под профилированным подлокотником ручки и максимально приближена к пятну контакта локтевого сустава руки летчика с подлокотником. Последний прикреплен через регулируемые сборочные узлы к боковой стенке кабины летательного аппарата. Все регулируемые и регулировочные сборочные узлы ручки выполнены в виде подпружиненных шлицевых соединений. Техническим результатом известного способа является улучшение компоновки кабины, повышение комфортности летчика, точности пилотирования и надежности в работе ручки.
Общим недостатком известных устройств являются их ограниченные технические возможности, а именно, создание статических и динамических противодействующих перемещению рукоятей усилий (загрузки рукоятей), что, безусловно, необходимо при управлении летательными аппаратами, но не требуется при управлении наземными подвижными объектами, в частности, лесозаготовительными транспортно-технологическими машинами.
Данный факт обусловлен тем, что оператор наземных подвижных объектов не испытывает динамических перегрузок, а управление такими объектами осуществляется, как правило, электронными джойстиками, не имеющими механической связи с исполнительными устройствами, при этом усилие на рукоятях джойстиков постоянно.
Однако, в процессе обучения операторов транспортно-технологических машин, например, харвестеров, возникает задача обеспечения канала обратной связи «машина – человек», путем создания фиксирующих усилий на рукоятях джойстиков, блокирующих их перемещение при достижении рукояти назначенного положения для предупреждения ошибочных действий. Так, например, при ошибочном наведении рабочего органа лесозаготовительной машины на дерево в момент столкновения с деревом в гидравлической системе лесозаготовительной машины могут возникать перегрузки, гидроудары, повреждения рабочего органа.
При этом процесс наведения рабочего органа контролируется оператором только визуально, что в процессе обучения оказывается недостаточным [4]. Кроме того, в силу инерционности зрительной системы человека [5], имеет место запаздывание в обработке зрительной информации.
Наиболее близким по технической сущности к предъявляемому устройству является устройство ручного управления летательным аппаратом [6], содержащее корпус, рукоятку, кинематически связанную с двумя системами, как раздельного, так и одновременного движения рукоятки по двум взаимно перпендикулярным направлениям, включающими электрические датчики угла поворота рукоятки. Одна из систем включает ось, жестко связанную с рукояткой, установленной в продольной прорези поводка с возможностью движения вдоль нее и поворота вала, жестко связанного с рукояткой, размещенных в рамке, выполненной за одно целое с валом. Один из концов вала установлен в подшипнике, размещенном в корпусе, а второй - соосно установлен и жестко связан с выходным валом мехатронного электропривода. Другая система включает поводок, в продольной прорези которого размещена рукоятка. При этом поводок является составной частью другого вала, первый конец которого установлен на другом подшипнике, размещенном в корпусе устройства, а второй конец жестко связан с выходным валом другого мехатронного электропривода.
Недостатком данного устройства является отсутствие возможности создавать фиксирующие усилия на рукояти джойстика в назначенном положении рукояти, блокирующие возможность перемещения рукояти из данного положения.
Технический результат предлагаемого решения заключается в расширении функциональных возможностей известных способов за счет создания фиксирующих усилий на рукояти джойстика при любом заданном положении рукояти, блокирующих перемещение рукояти из данного положения.
Указанный технический результат достигается тем, что устройство для обучения управлению подвижными объектами с помощью джойстиков содержит рукоять, кинематически связанную с двумя системами, как раздельного, так и одновременного движения рукояти по двум взаимно перпендикулярным направлениям, включающим механические валы, установленные в подшипниках скольжения с возможностью движения вдоль подшипников и поворота вала, электрические датчики угла поворота рукояти по двум направлениям, причем новым является то, что каждая из взаимно перпендикулярных осей вращения рукояти оснащена тормозным механизмом, выполненным в виде электромагнита с подпружиненным сердечником, фиксирующим перемещение по соответствующей оси при достижении заданного положения.
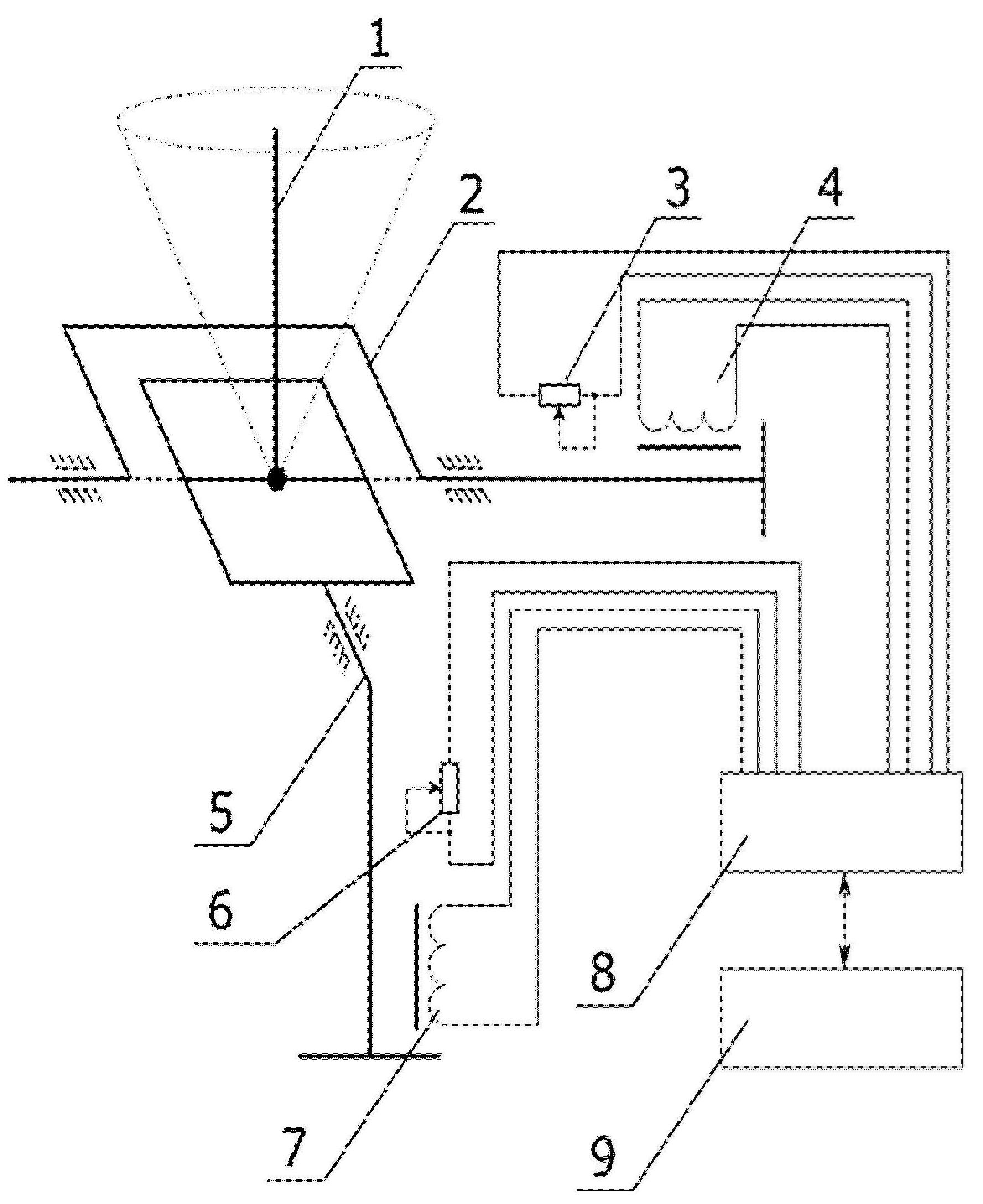
На чертеже представлена структура устройства, поясняющая принцип его работы.
Рукоять 1 кинематически связана с вертикальной осью 2, снабженной датчиком положения вертикальной оси 3, тормозным механизмом горизонтальной оси 4; а также кинематически связана с горизонтальной осью 5, снабженной датчиком положения горизонтальной оси 5 и тормозным механизмом горизонтальной оси 6. Измерительная информация с датчика положения вертикальной оси 3 и датчика положения горизонтальной оси 5 поступает в блок управления и коммутации 8, далее в цифровом виде поступает в ЭВМ 9. Командная информация о необходимом тормозном усилии по каждой из осей поступает из ЭВМ 9 в блок управления и коммутации 8, далее в аналоговом виде поступает в тормозной механизм горизонтальной оси 4 и тормозной механизм вертикальной оси 6.
Работа устройства осуществляется следующим образом.
На первом этапе рукоять 1 джойстика находится в руке обучаемого оператора в среднем положении по горизонтальной оси 5 и по вертикальной оси 2, тормозной механизм горизонтальной оси, выполненный в виде электромагнита с подпружиненным сердечником 7 расслаблен, тормозной механизм вертикальной оси, выполненный в виде электромагнита с подпружиненным сердечником 4 расслаблен. Рукоять свободно перемещается по горизонтальной и вертикальной оси.
На втором этапе обучаемый оператор перемещает рукоять 1 по горизонтальной оси 5 и по вертикальной оси 2, при этом перемещение по горизонтальной оси измеряют с помощью резистивного датчика положения 6, ползунок которого механически связан с горизонтальной осью, перемещение по вертикальной оси измеряют с помощью резистивного датчика положения 3, ползунок которого связан с вертикальной осью. Полученная измерительная информация поступает в блок управления и коммутации 8 и далее в ЭВМ 9.
На третьем этапе при достижении заданного положения по горизонтальной оси 5 и по вертикальной оси 2 включают тормозной механизм горизонтальной оси, выполненный в виде электромагнита с подпружиненным сердечником 7 и тормозной механизм вертикальной оси, выполненный в виде электромагнита с подпружиненным сердечником 4. Изменяя ток, протекающий через электромагниты тормозных механизмов 7 и 4, добиваются необходимого тормозного усилия, фиксируя рукоять в заданном положении и предупреждая ошибочные действия оператора по дальнейшему отклонению рукояти.
Предлагаемое устройство для обучения управлению подвижными объектами с помощью джойстиков позволяет расширить функциональные возможности известных способов за счет создания фиксирующих усилий на рукояти джойстика при любом заданном положении рукояти, блокирующих перемещение рукояти из данного положения.
Литература:
1. Патент № 2298836 РФ G09B9/28. Система загрузки рычагов управления авиационного тренажера // Кваша М.М. (РФ), Мирошкин Ю.В. (РФ), Мирясов В.Е. (РФ), Подрядчиков Н.В. (РФ). Заявка: 2005117252/28, 06.06.2005 Опубл. 20.12.2006, Бюл. № 35.
2. Патент № 2253593 РФ B64C13/04. Устройство ручного управления подвижным объектом // Сопин А.П. (РФ), Князев Л.И. (РФ), Титов А.А. (РФ). Заявка: 2003118284/11, 20.06.2003 Опубл. 27.01.2005, Бюл. № 3.
3. Патент № 2164878 РФ B64C13/06, G05G9/02. Боковая кистевая ручка управления летательным аппаратом // Титов А.А. (РФ). Заявка: 99109176/28, 30.04.1999 Опубл. 27.01.2001, Бюл. № 3.
4. Petukhov, I., Steshina, L. Assessment of vocational aptitude of man-machine systems operators // Proceedings - 2014 7th International Conference on Human System Interactions, HSI 2014. 6860446, с. 44-48.
5. Патент № 2262293 РФ, МПК7 А 61 В 3/02. Способ определения времени инерционности зрительной системы человека // Петухов И.В. (РФ), Лежнин А.В. (РФ), Роженцов В.В. (РФ) Заявка: 2004133799/14, 18.11.2004 Опубл. 20.10.2005, Бюл. № 29.
6. Патент № 2652284 РФ B64C13/04, G09B9/28, G05G9/047. Устройство ручного управления летательным аппаратом // Лазарев С.А. (РФ), Чихняев В.А. (РФ). Заявка: 2016152013, 27.12.2016 Опубл. 25.04.2018, Бюл. № 12.
Устройство для обучения управлению подвижными объектами с помощью джойстиков содержит рукоять, кинематически связанную с двумя системами, как раздельного, так и одновременного движения рукояти по двум взаимно перпендикулярным направлениям, включающим механические валы, установленные в подшипниках скольжения с возможностью движения вдоль подшипников и поворота вала, электрические датчики угла поворота рукояти по двум направлениям, отличающееся тем, что каждая из взаимно перпендикулярных осей вращения рукояти оснащена тормозным механизмом, выполненным в виде электромагнита с подпружиненным сердечником, фиксирующим перемещение по соответствующей оси при достижении заданного положения.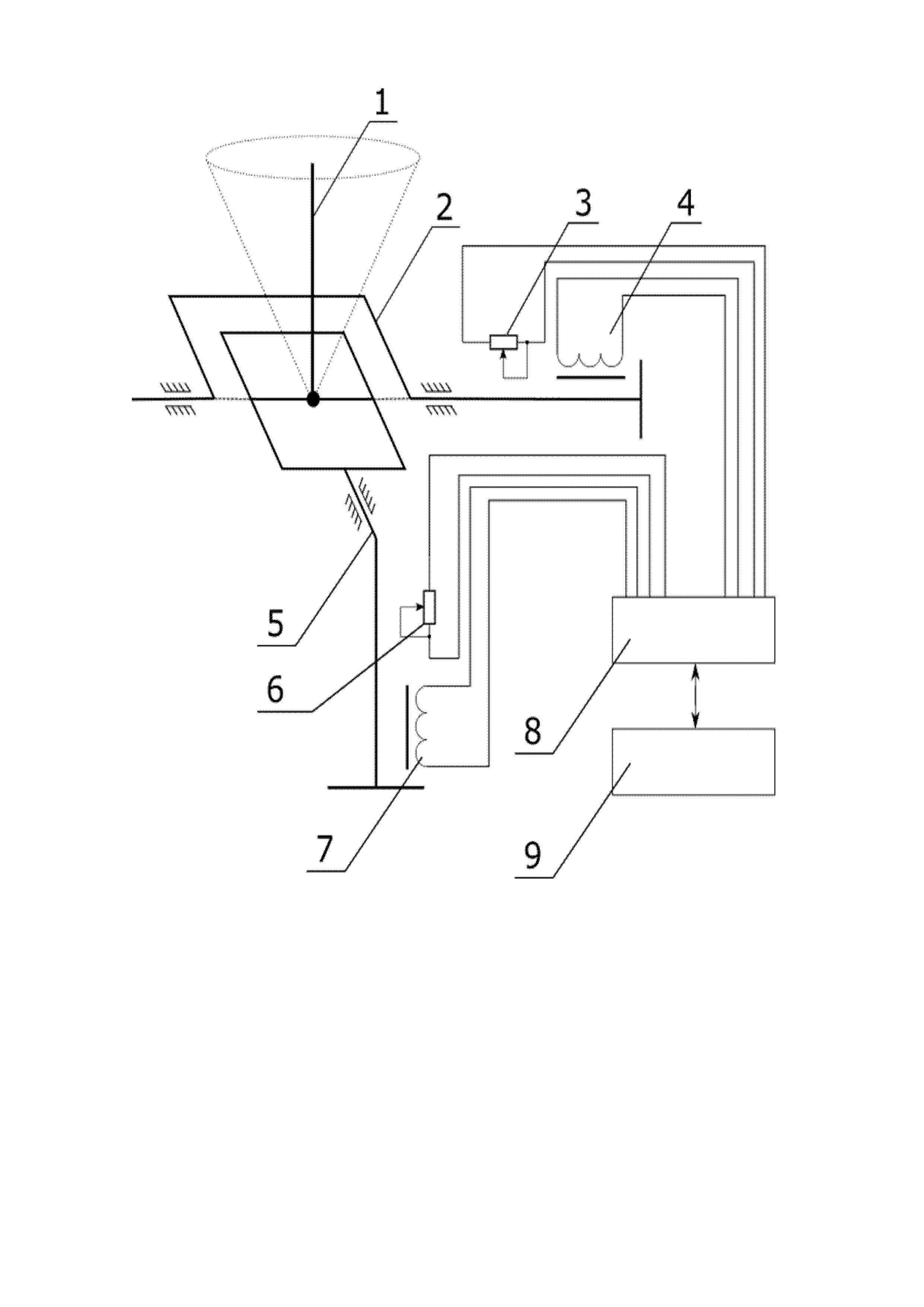
Ручное устройство для образования лунок под посадку контейнеризированных сеянцев
Цифровой вычислительный синтезатор двухчастотных сигналов
Ядоприемник для сбора пчелиного яда
Игрушка
Станок для продольной распиловки бревен
Устройство для выравнивания торцов пачки круглых лесоматериалов
Многоцелевая транспортно-технологическая платформа со смещаемым центром тяжести
Способ получения конструкционной пилопродукции из круглых лесоматериалов, имеющих сердцевинную гниль
Способ определения упруго-диссипативных характеристик древесины
Строительный материал на основе портландцемента, трепела и отходов лесозаготовок, лесопиления и деревообработки
Способ подготовки операторов транспортеров-погрузчиков

