Результат интеллектуальной деятельности: ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА
Вид РИД
Изобретение
Изобретение относится к области ядерной техники и может быть применено в исполнительных механизмах системы управления и защиты ядерного реактора.
Наиболее близким по совокупности существенных признаков к заявленному изобретению является исполнительный механизм системы управления и защиты ядерного реактора, содержащий линейный шаговый двигатель с якорем, штангу, расположенную соосно якорю, жестко соединенную с ним с возможностью совместного вертикального перемещения и поворота вокруг вертикальной оси и выполненную с возможностью образования байонетного соединения с рабочим органом, и фиксатор от самопроизвольного поворота штанги (Основы конструирования исполнительных механизмов управления ядерных реакторов. И.Я. Емельянов, В.В. Воскобойников, Б.А. Масленок; М.: Энергоатомиздат, 1987; рис. 3.15в, с. 41).
В известном исполнительном механизме системы управления и защиты ядерного реактора фиксатор представляет собой подпружиненный упор в составе нижнего конца штанги, а байонетное соединение выполнено П-образным с возможностью сцепления и расцепления штанги и рабочего органа путем поворота штанги вокруг общей вертикальной оси, при этом вращение рабочего органа конструктивно исключено. Соединение штанги с рабочим органом выполняют тремя ходами штанги (опускание до упора в угол байонетного соединения, поворот до упора в следующий угол байонетного соединения, подъем до упора в тупик байонетного соединения), при этом подпружиненный упор в сцепленном положении удерживает штангу от выхода из тупика байонетного соединения, чтобы за счет этого исключить поворот штанги в сторону расцепления байонетного соединения с рабочим органом.
Недостатком известного исполнительного механизма системы управления и защиты ядерного реактора является возможность самопроизвольного расцепления байонетного соединения штанги и рабочего органа в результате отказа подпружиненного упора из-за жесткой радиации и высокой температуры в районе расположения нижнего конца штанги.
Задачей настоящего изобретения является создание исполнительного механизма системы управления и защиты ядерного реактора, позволяющего упростить работу по соединению штанги с рабочим органом, а также повысить надежность сцепления штанги с рабочим органом в условиях высокой температуры и жесткой радиации.
Техническим результатом настоящего изобретения является исключение самопроизвольного расцепления байонетного соединения при одновременном сокращении ходовых действий по его сцеплению-расцеплению.
Указанный технический результат достигается тем, что в известном исполнительном механизме системы управления и защиты ядерного реактора, включающем линейный шаговый двигатель с якорем, штангу, расположенную соосно якорю, жестко соединенную с ним с обеспечением совместного вертикального перемещения и поворота вокруг вертикальной оси и выполненную с возможностью образования байонетного соединения с рабочим органом, и фиксатор от самопроизвольного поворота штанги, согласно заявленному изобретению байонетное соединение выполнено Г-образным, при этом фиксатор от самопроизвольного поворота штанги содержит направляющую, расположенную внутри якоря и снабженную фланцем и сквозной продольной прорезью, поперечину, жестко связанную с якорем и установленную в упомянутой прорези с возможностью вертикального перемещения в ней на рабочий ход, неподвижное кольцо, на которое оперт внутренней поверхностью фланец, и вертикальный палец, при этом на наружной кромке фланца выполнены равномерно расположенные сквозные прорези, а в неподвижном кольце выполнены равномерно расположенные по окружности отверстия, в одно из которых установлен вертикальный палец, проходящий через одну из сквозных прорезей фланца.
Кроме этого, сквозные прорези фланца и отверстия неподвижного кольца расположены относительно друг друга с разницей угловых шагов не более 2°.
Выполнение фиксатора от самопроизвольного поворота штанги из конструктивных элементов, которые расположены над штангой в области невысоких температур и отсутствия радиации, позволяет сохранить его начальные эксплуатационные характеристики и тем самым повысить надежность сцепления штанги с рабочим органом. Кроме этого, вышеуказанное выполнение фиксатора позволяет использовать в заявленном изобретении двухходовое байонетное соединение, а именно Г-образного типа. В заявленном исполнительном механизме системы управления и защиты ядерного реактора поворот в сторону расцепления исключен стопорением вращения штанги исполнительного механизма, поэтому третий ход сцепления и подпружиненный упор, что имеется в известном исполнительном механизме (прототипе), отсутствуют в заявленном устройстве.
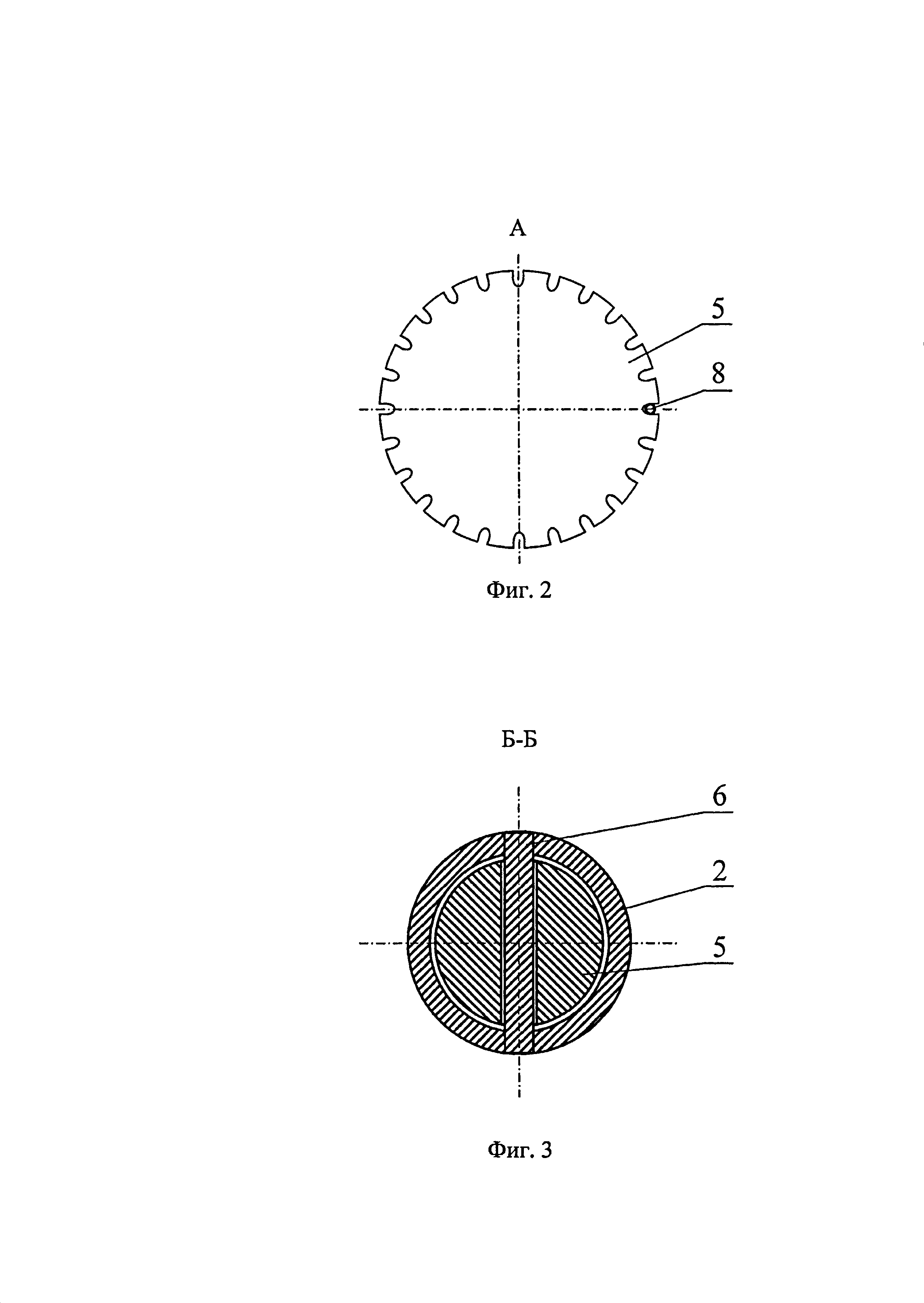
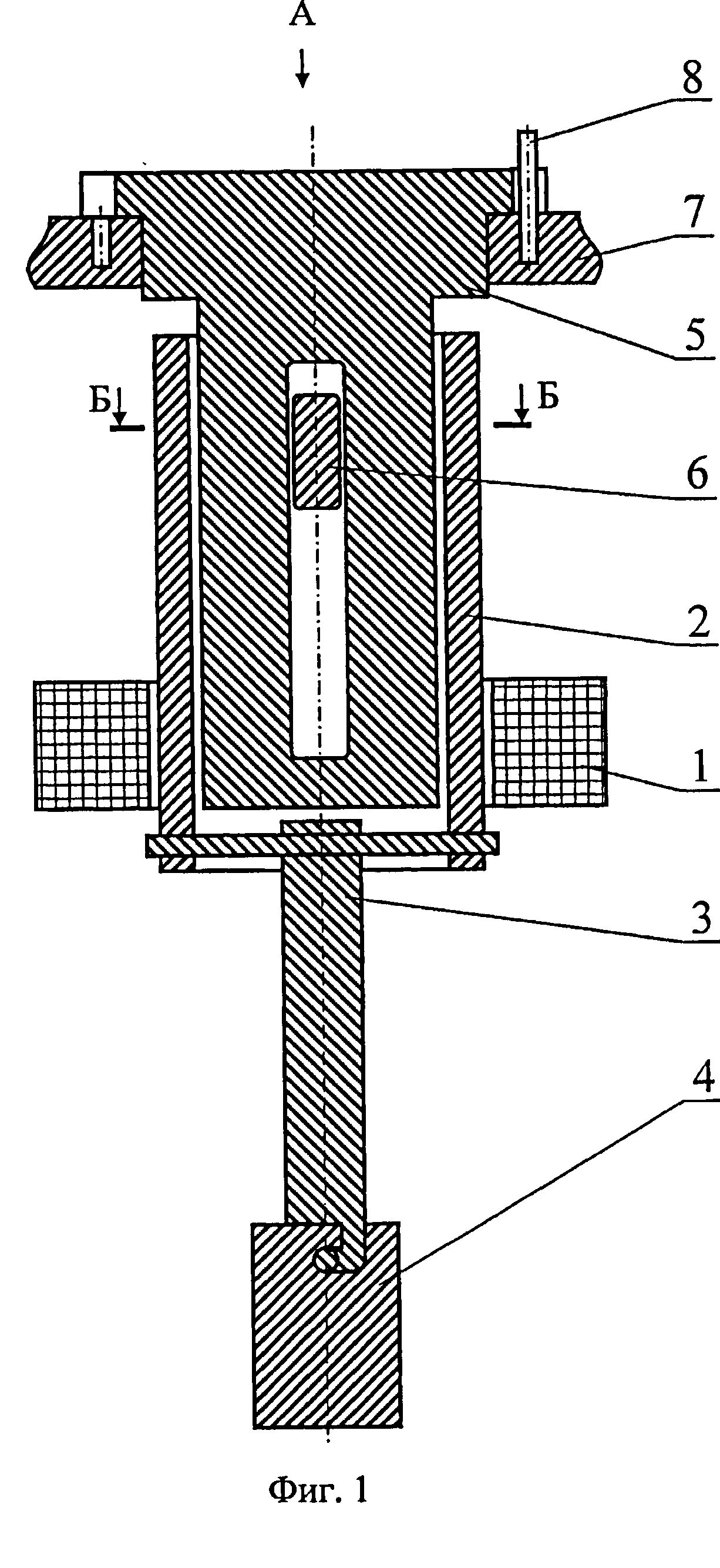
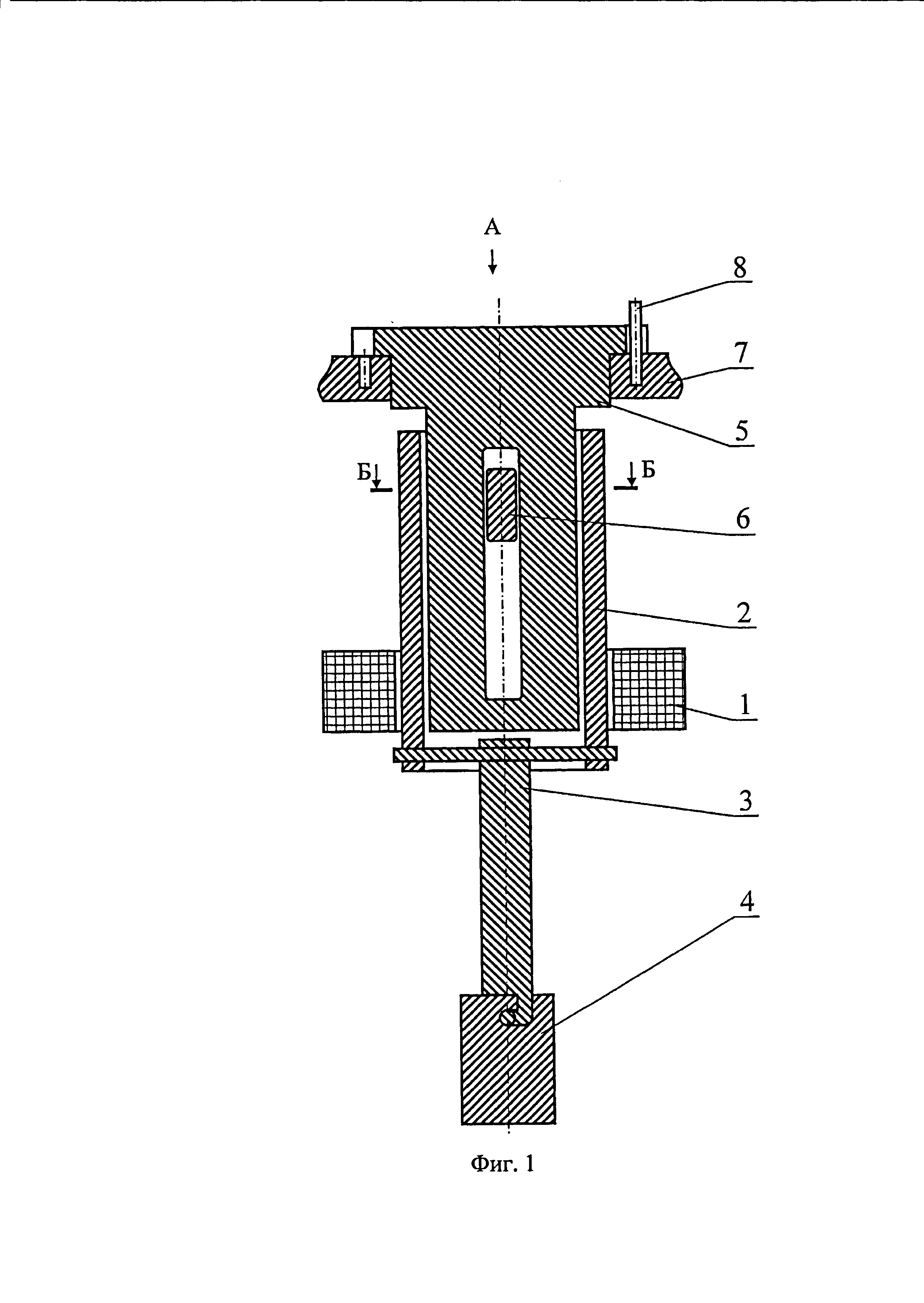
Сущность заявленного изобретения поясняется чертежами, где на фиг. 1 представлен исполнительный механизм системы управления и защиты ядерного реактора (общий вид, разрез), на фиг. 2 изображен фланец направляющей фиксатора от самопроизвольного поворота штанги (вид А сверху), на фиг. 3 показан якорь с поперечиной (сечение Б-Б).
Исполнительный механизм системы управления и защиты ядерного реактора содержит линейный шаговый двигатель 1 с якорем 2, имеющим форму вертикальной трубы, штангу 3, установленную соосно якорю 2 и жестко соединенную с ним с возможностью совместного вертикального перемещения и поворота вокруг вертикальной оси, и фиксатор от самопроизвольного поворота штанги 3. Нижний конец штанги 3 связан с рабочим органом 4 Г- образным байонетным соединением. Фиксатор от самопроизвольного поворота штанги 3 включает направляющую 5, поперечину 6, неподвижное кольцо 7 и вертикальный палец 8. Направляющая 5 снабжена фланцем, расположенным на ее верхнем конце. Свободной нижней частью направляющая 5 расположена внутри якоря 2, при этом фланец внутренней поверхностью оперт на неподвижное кольцо 7 и сцентрирован по его внутренней окружности. В свободной нижней части направляющей 5 выполнена сквозная продольная прорезь, в которой установлена поперечина 6, жестко закрепленная на якоре 2 с возможностью вертикального перемещения по прорези на рабочий ход. В наружной кромке фланца направляющей 5 выполнены вертикальные сквозные прорези, которые расположены равномерно по окружности. В неподвижном кольце 7 выполнены вертикальные отверстия, которые расположены равномерно по окружности. В одно из вертикальных отверстий неподвижного кольца 7 установлен вертикальный палец 8, который проходит через одну из сквозных прорезей фланца направляющей 5. Сквозные прорези фланца направляющей 5 и отверстия неподвижного кольца 7 расположены относительно друг друга с разницей угловых шагов не более 2°.
Исполнительный механизм системы управления и защиты ядерного реактора работает следующим образом.
Линейный шаговый двигатель 1 вертикально перемещает якорь 2 и жестко соединенную с якорем 2 штангу 3, связанную с рабочим органом 4 Г-образным байонетным соединением. Вертикальное перемещение рабочего органа 4 усиливает или ослабляет ядерную реакцию в ядерном реакторе. Для соединения штанги 3 с рабочим органом 4 извлекают вертикальный палец 8 из якорем 2 до упора штанги 3 в угол байонетного соединения с рабочим органом 4, затем поворачивают штангу 3 вместе с якорем 2 и направляющей 5 до упора штанги 3 в тупик байонетного соединения с рабочим органом 4, затем вертикальный палец 8 устанавливают через прорезь фланца направляющей 5 в отверстие в неподвижном кольце 7. Для расцепления штанги 3 с рабочим органом 4 извлекают вертикальный палец 8 из отверстия в неподвижном кольце 7, затем поворачивают штангу 3 вместе с якорем 2 и направляющей 5 до упора штанги 3 в угол байонетного соединения с рабочим органом 4, затем поднимают штангу 3 вместе с якорем 2 до выхода штанги 3 из байонетного соединения с рабочим органом 4, затем вертикальный палец 8 устанавливают через прорезь фланца направляющей 5 в отверстие в неподвижном кольце 7.
Гальванопластический способ изготовления сложно-рельефных элементов антенно-фидерных устройств
Пневматическая установка для испытаний
Шланговый гамма-дефектоскоп
Способ переработки жидких радиоактивных отходов от применения дезактивирующих растворов
Ультразвуковой способ контроля плотности в процессе эксплуатации деталей из высоконаполненных композитных материалов на основе октогена
Способ изготовления многоуровневых тонкопленочных микросхем
Способ герметизации трубчатых электронагревателей
Способ получения керамических блочно-ячеистых фильтров-сорбентов для улавливания газообразных радиоактивных и вредных веществ
Широкополосный спектрометр мягкого рентгеновского излучения
Блок трансформаторной развязки
Линейный шаговый двигатель с продольным магнитным полем
Линейный шаговый двигатель исполнительного механизма системы управления и защиты ядерного реактора
Многосекционная фильтрующая установка кудрявцева
Ядерная энергоустановка кудрявцева и паровая турбина кудрявцева
Угловой патрубок электрического соединителя кабеля

