Результат интеллектуальной деятельности: СПОСОБ ГЕНЕРАЦИИ ЦЕЛЕВОЙ СКОРОСТИ И УСТРОЙСТВО ГЕНЕРАЦИИ ЦЕЛЕВОЙ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА С СОДЕЙСТВИЕМ ВОЖДЕНИЮ
Вид РИД
Изобретение
Область техники
[0001] Настоящее раскрытие относится к способу и устройству для генерирования целевой скорости транспортного средства с содействием вождению, в котором целевая скорость рассматриваемого транспортного средства генерируется в соответствии с препятствием, которое препятствует движению рассматриваемого транспортного средства.
Уровень техники
[0002] Из уровня техники известны устройства для управления движением транспортного средства, в которых целевая скорость транспортного средства генерируется на основе оставшейся ширины дороги с учетом препятствия на пути движения рассматриваемого транспортного средства (см., например, патентную ссылку 1).
Документы уровня техники
Патентные документы
[0003] Патентная ссылка 1: JP-2013-184563 A.
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако в устройствах уровня техники внимание уделяется только препятствиям на пути движения рассматриваемого транспортного средства, а не препятствиям (стенам и т.д.), которые расположены сбоку и находятся вне пути движения рассматриваемого транспортного средства. Поэтому, когда оставшаяся ширина дороги из-за препятствия на пути движения рассматриваемого транспортного средства является одинаковой независимо от того, присутствует ли или нет препятствие сбоку от пути движения рассматриваемого транспортного средства, составлялся выведенный из целевой скорости транспортного средства план скорости транспортного средства, которая уменьшается аналогичным образом независимо от того, присутствует ли или нет препятствие сбоку от пути движения рассматриваемого транспортного средства. Таким образом, имеется проблема, заключающаяся в том, что, когда сбоку от пути движения рассматриваемого транспортного средства присутствует препятствие, пассажир будет испытывать неестественное чувство, что расположенная сбоку стена кажется приближающейся, а когда сбоку от пути движения рассматриваемого транспортного средства нет никаких препятствий, пассажир будет чувствовать, что движение на дороге, где нет никаких препятствий, является нежелательно медленным.
[0005] Настоящее раскрытие было придумано с учетом описанной выше проблемы, и задачей настоящего раскрытия является предотвращение неприятных ощущений у пассажира, независимо от того, присутствует ли или нет препятствие сбоку от пути движения рассматриваемого транспортного средства во время движения с содействием вождению (помощью вождению).
Средства, используемые для решения вышеперечисленных проблем
[0006] Для решения вышеуказанной задачи в настоящем раскрытии предлагается способ генерирования целевой скорости транспортного средства с содействием вождению, в котором целевую скорость рассматриваемого транспортного средства генерируют в соответствии с препятствиями, которые препятствуют движению рассматриваемого транспортного средства. Генерируют целевой маршрут движения рассматриваемого транспортного средства. Получают информацию о местоположении, относящуюся к препятствиям, по отношению к целевому маршруту движения. Вычисляют множество боковых отклонений до препятствий относительно целевого маршрута движения. Рассчитывают более короткое виртуальное расстояние для одного из препятствий, имеющего меньшее боковое отклонение, чем для одного из препятствий, имеющего большее боковое отклонение, на основе расстояния вперед и боковых расстояний до препятствий в отношении рассматриваемого транспортного средства. Выбирают препятствие, для которого рассчитанное по отношению к препятствиям виртуальное расстояние является наименьшим, рассчитывают кратчайшее виртуальное расстояние и генерируют целевую скорость транспортного средства на основе кратчайшего виртуального расстояния.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] Как описано выше, составление плана скорости транспортного средства на основе расстояния вперед и бокового отклонения препятствия относительно рассматриваемого транспортного средства позволяет предотвратить возникновение неприятных ощущений у пассажира независимо от того, имеется ли или нет препятствие сбоку от пути движения рассматриваемого транспортного средства во время движения с содействием вождению. В дополнение, обращение с расстоянием вперед и боковым отклонением препятствия относительно рассматриваемого транспортного средства как виртуальными расстояниями позволяет упростить генерацию целевой скорости транспортного средства и управление скоростью транспортного средства. Более того, генерирование целевой скорости транспортного средства на основе кратчайшего виртуального расстояния позволяет уменьшить количество расчетов скорости и снизить вычислительную нагрузку.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
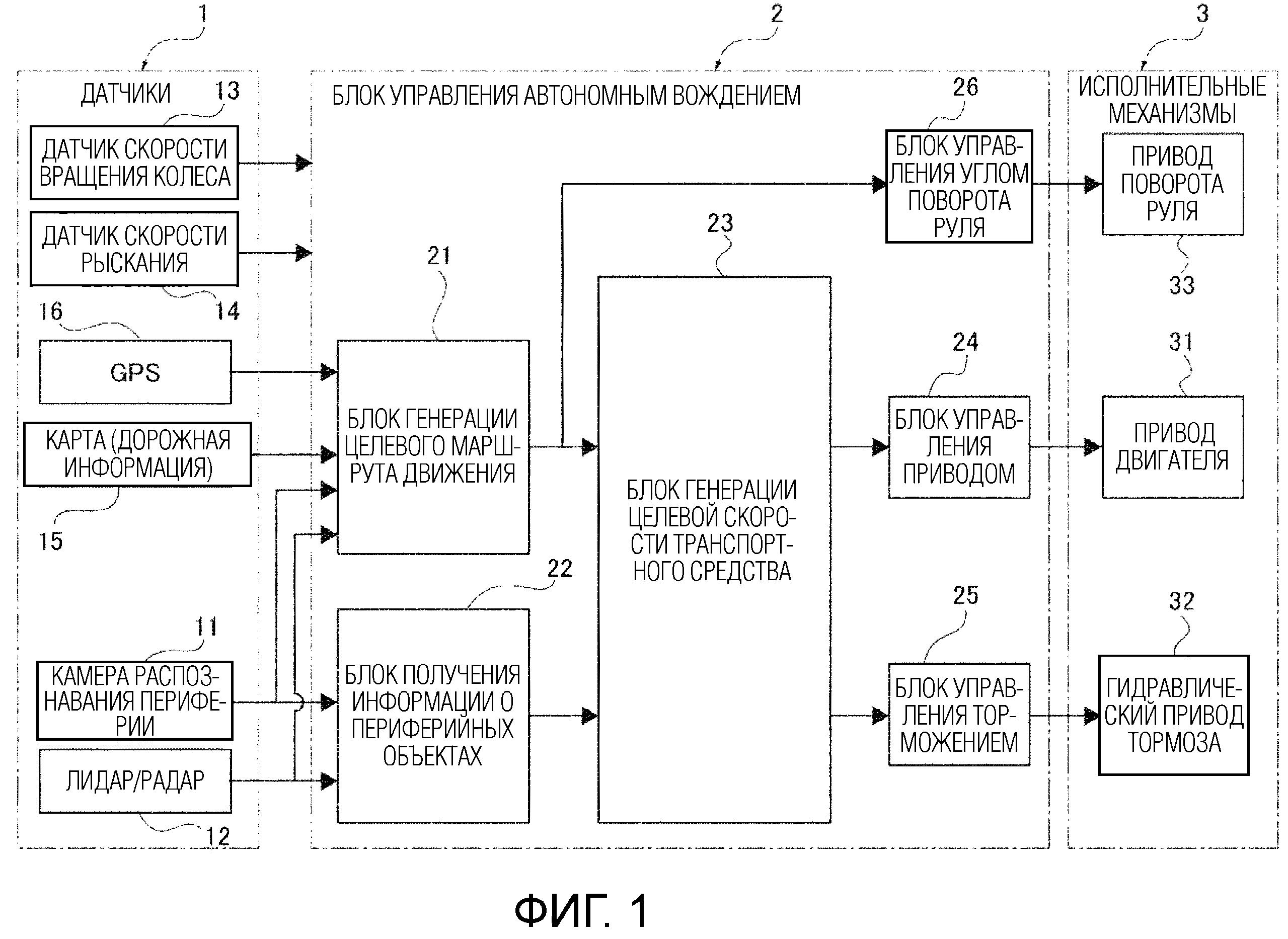
[0008] Фиг. 1 - общая схема системы, иллюстрирующая систему управления автономным вождением, в которой были применены способ и устройство для генерирования целевой скорости транспортного средства в первом варианте осуществления;
Фиг. 2 - блок-схема, иллюстрирующая подробную конфигурацию блока генерации целевой скорости транспортного средства в способе и устройстве для генерирования целевой скорости транспортного средства в первом варианте осуществления;
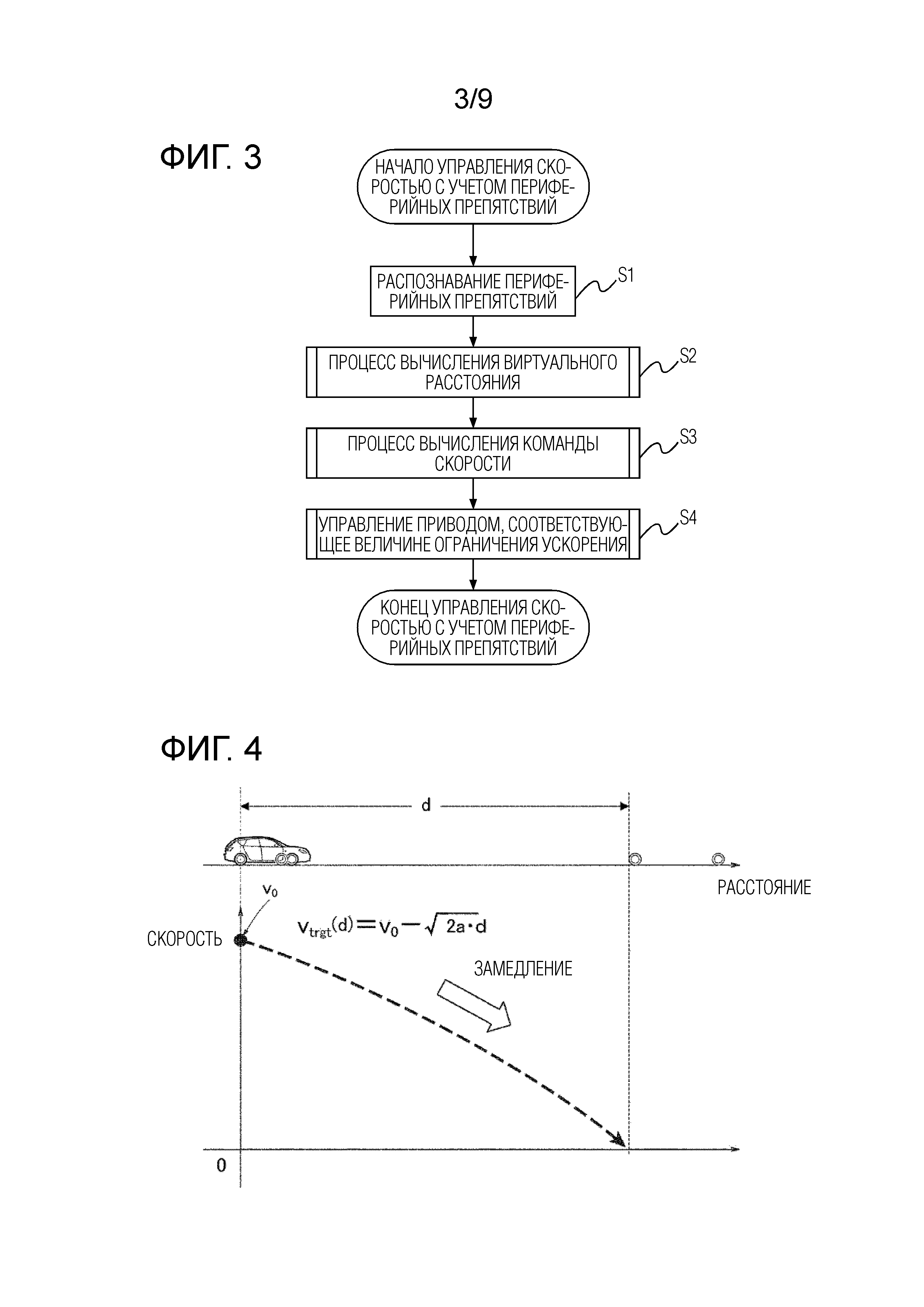
Фиг. 3 - блок-схема последовательности операций, иллюстрирующая последовательность операций процесса управления скоростью транспортного средства, в котором используется целевая скорость транспортного средства, причем этот процесс управления скоростью транспортного средства выполняется блоком управления автономным вождением в первом варианте осуществления;
Фиг. 4 - характерная диаграмма профиля скорости, иллюстрирующая профиль скорости транспортного средства, сгенерированный посредством процесса вычисления команды скорости транспортного средства на этапе S3 блок-схемы последовательности операций, показанной на фиг. 3;
Фиг. 5 - блок-схема последовательности операций, иллюстрирующая последовательность операций процесса вычисления виртуального расстояния на этапе S2 блок-схемы последовательности операций, показанной на фиг. 3;
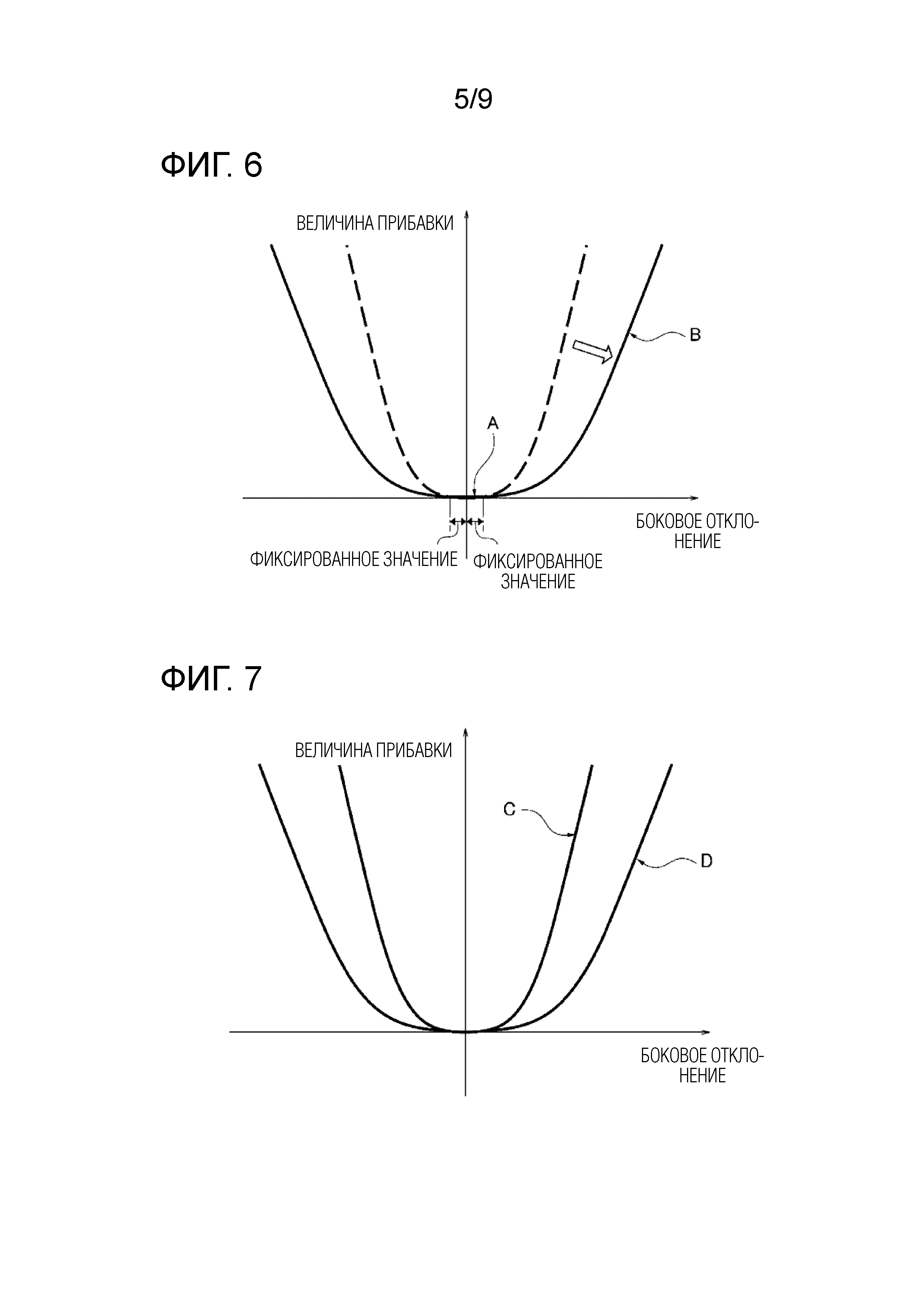
Фиг. 6 - схема карты, иллюстрирующая один пример карты A величин прибавки и карты B величин прибавки, используемых в процессе вычисления виртуального расстояния;
Фиг. 7 - схема карты, иллюстрирующая один пример карты C величин прибавки и карты D величин прибавки, используемых в процессе вычисления виртуального расстояния;
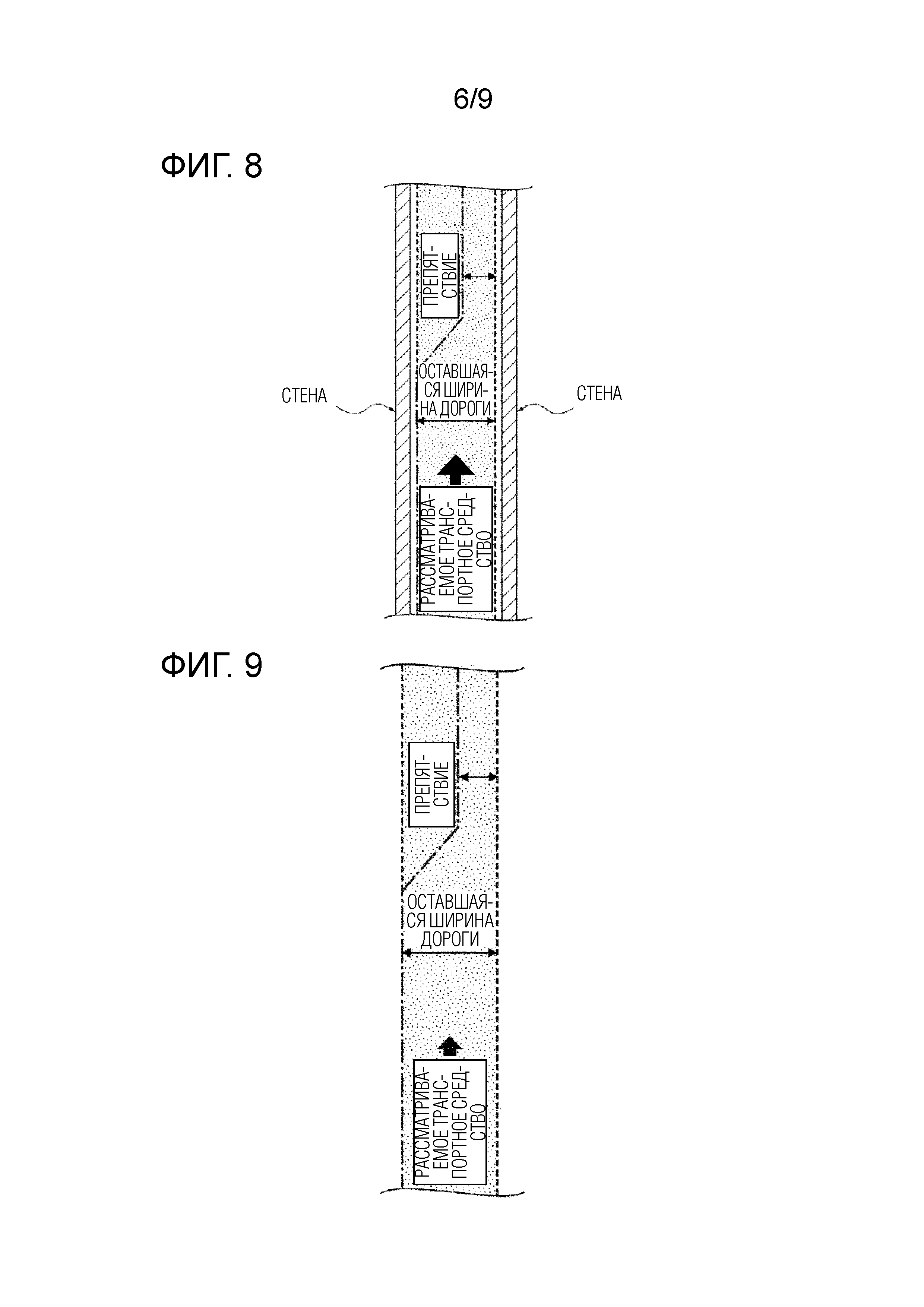
Фиг. 8 - схематичная диаграмма работы, иллюстрирующая операцию управления скоростью в сравнительном примере, когда впереди на пути движения рассматриваемого транспортного средства присутствует препятствие, а сбоку от пути движения рассматриваемого транспортного средства присутствует стена (препятствие);
Фиг. 9 - схематичная диаграмма работы, иллюстрирующую операцию управления скоростью в сравнительном примере, когда впереди на пути движения рассматриваемого транспортного средства присутствует препятствие, но нет стены (препятствия) сбоку от пути движения рассматриваемого транспортного средства;
Фиг. 10 - блок-схема последовательности операций, иллюстрирующая последовательность операций процесса генерации целевой скорости транспортного средства, выполняемого блоком управления автономным вождением в первом варианте осуществления;
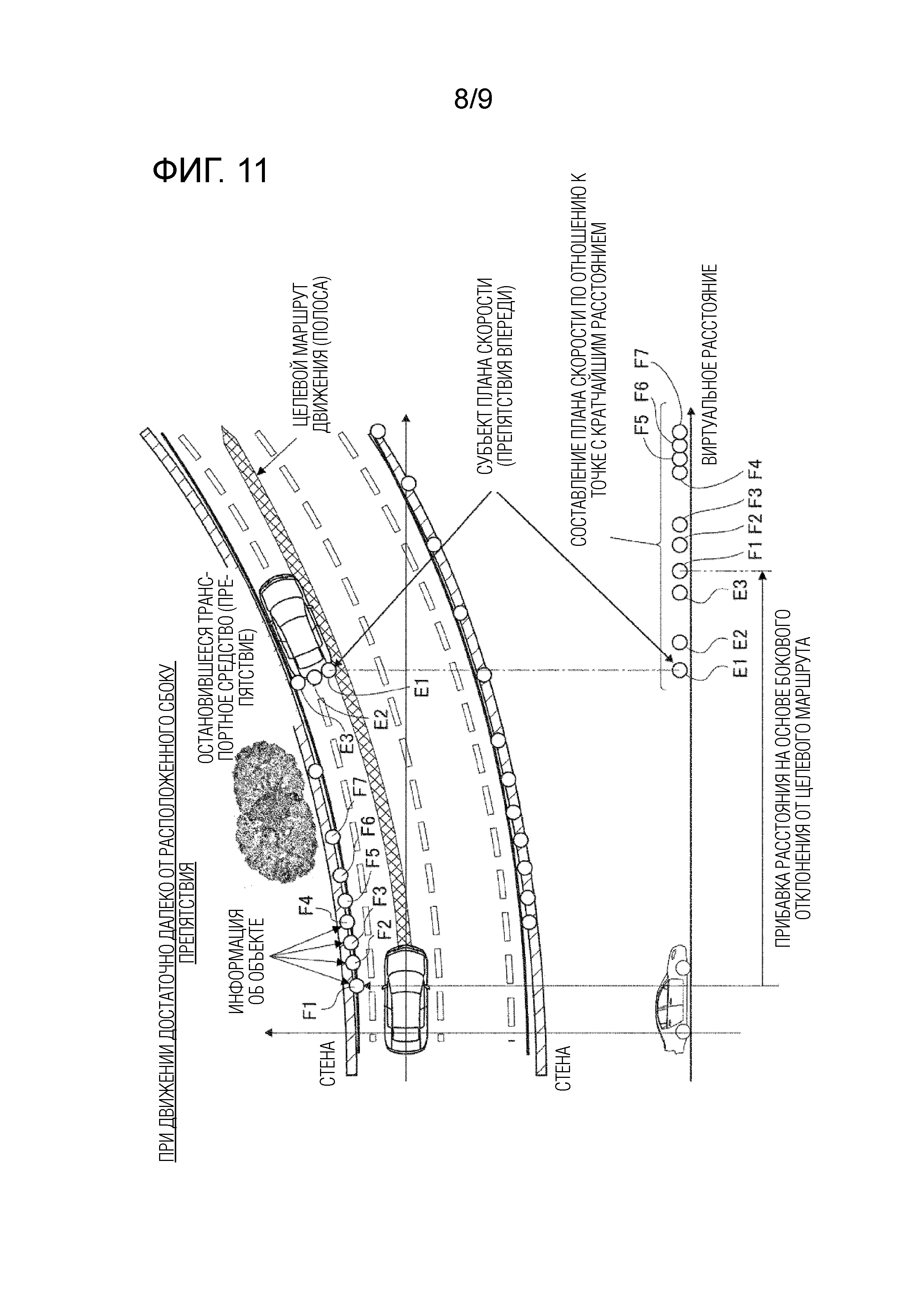
Фиг. 11 - схематичная диаграмма работы, иллюстрирующая операцию управления скоростью в случае, когда рассматриваемое транспортное средство движется достаточно далеко от расположенного сбоку препятствия, когда впереди на пути движения рассматриваемого транспортного средства (слегка изогнутая дорога) имеется препятствие и присутствует стена (препятствие) сбоку от пути движения рассматриваемого транспортного средства в первом варианте осуществления; и
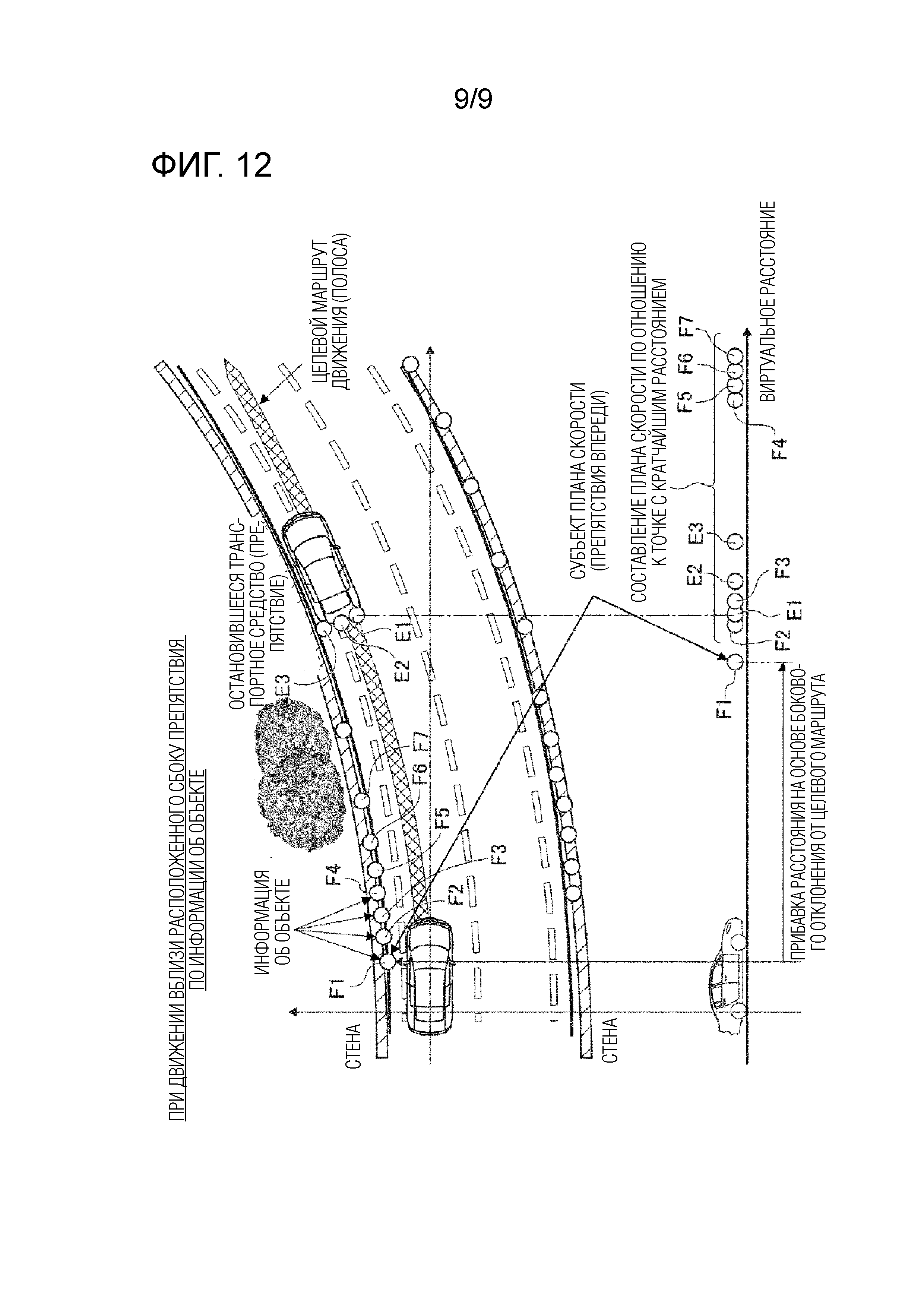
Фиг. 12 - схематичная диаграмма работы, иллюстрирующая операцию управления скоростью в случае, когда рассматриваемое транспортное средство движется рядом с расположенным сбоку препятствием, когда впереди на пути движения рассматриваемого транспортного средства (слегка изогнутая дорога) имеется препятствие и присутствует стена (препятствие) сбоку от пути движения рассматриваемого транспортного средства в первом варианте осуществления.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления способа и реализации устройства для генерирования целевой скорости транспортного средства с содействием вождению в соответствии с настоящим раскрытием будет описан ниже на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала будет описана конфигурация. Способ и устройство для генерирования целевой скорости транспортного средства с содействием вождению в первом варианте осуществления применяются к транспортному средству автономного вождения (один из примеров транспортного средства с содействием вождению), в котором сгенерированная информация о целевой скорости транспортного средства используется в управлении скоростью, а управление рулением/приводом/торможением осуществляется автономно посредством выбора режима автономного вождения. Конфигурация в первом варианте осуществления описана ниже и конкретно подразделяется на «Общую конфигурацию системы», «Подробную конфигурацию блока генерирования целевой скорости транспортного средства», «Конфигурацию процесса управления скоростью» и «Конфигурацию процесса вычисления виртуального расстояния».
Общая конфигурация системы
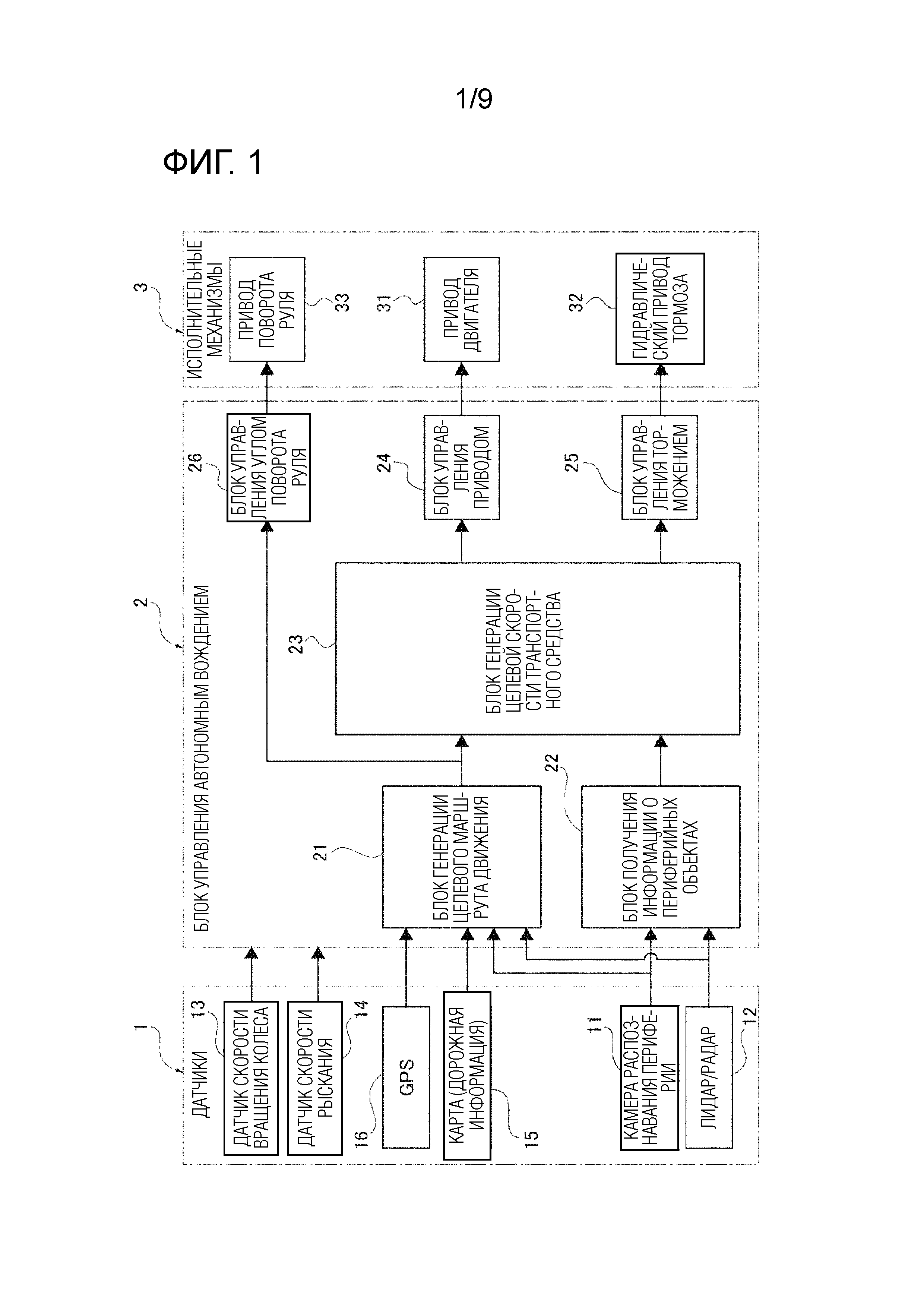
[0011] На фиг. 1 показана общая схема системы, иллюстрирующая систему управления автономным вождением, в которой были применены способ и устройство для генерирования целевой скорости транспортного средства в первом варианте осуществления. Общая конфигурация системы описана ниже со ссылкой на фиг. 1.
[0012] Как показано на фиг. 1, система управления автономным вождением содержит датчики 1, блок 2 управления автономным вождением и исполнительные механизмы 3. Блок 2 управления автономным вождением является компьютером, который содержит ЦП или другой блок обработки и выполняет арифметическую обработку.
[0013] Датчики 1 включают в себя камеру 11 распознавания периферии, лидар/радар 12, датчики 13 скорости вращения колеса, датчик 14 скорости рыскания, карту 15 и GPS 16.
[0014] Камера 11 распознавания периферии представляет собой, например, бортовое устройство формирования изображения, содержащее ПЗС-матрицу или другой элемент формирования изображения, причем камера 11 распознавания периферии устанавливается в предписанном положении на рассматриваемом транспортном средстве и захватывает изображения объектов на периферии рассматриваемого транспортного средства. Камера 11 распознавания периферии обнаруживает препятствия на пути движения рассматриваемого транспортного средства, препятствия, которые находятся вне пути движения рассматриваемого транспортного средства (дорожные конструкции, предшествующие транспортные средства, следующие транспортные средства, встречные транспортные средства, периферийные транспортные средства, пешеходы, велосипеды и мотоциклы), путь движения рассматриваемого транспортного средства (белые линии на дороге, границы дороги, линии остановки, пешеходные переходы), дорожные знаки (пределы ограничения скорости транспортного средства) и т.д. Множество установленных на транспортном средстве камер может быть объединено с образованием камеры 11 распознавания периферии.
[0015] Лидар/радар 12 является датчиком дальности, и в качестве него может быть использован любой тип датчика дальности, который известен во время применения, такой как лазерный радар, радар миллиметрового диапазона, ультразвуковой радар или лазерный дальномер. Лидар/радар 12 обнаруживает препятствия на пути движения рассматриваемого транспортного средства, препятствия, которые находятся вне пути движения рассматриваемого транспортного средства (дорожные конструкции, предшествующие транспортные средства, следующие транспортные средства, встречные транспортные средства, периферийные транспортные средства, пешеходы, велосипеды и мотоциклы) и так далее. Если угол обзора недостаточен, транспортное средство может быть оснащено множеством блоков. Лидар (датчик дальности, который излучает свет) и радар (датчик дальности, который излучает электромагнитные волны) также могут быть объединены.
[0016] Датчик 13 скорости вращения колеса предусмотрен для каждого из четырех колес. Датчики 13 скорости вращения колеса определяют скорость вращения каждого колеса. Среднее значение скоростей вращения левого и правого ведомых колес используется в качестве обнаруженного значения скорости транспортного средства в текущий момент времени.
[0017] Датчик 14 скорости рыскания представляет собой датчик ориентации, который определяет скорость рыскания транспортного средства (угловую скорость поворота вокруг вертикальной оси, проходящей через центр тяжести транспортного средства). Датчики ориентации включают гироскопические датчики, которые могут определять угол наклона, угол рыскания и угол крена транспортного средства.
[0018] Карта 15 представляет собой так называемую цифровую карту и представляет собой информацию, которая связывает широту/долготу и картографическую информацию. Карта 15 включает в себя дорожную информацию, которая была связана с соответствующими точками. Дорожная информация определяется узлами и связями, которые соединяют узлы друг с другом. Дорожная информация включает в себя информацию, которая описывает дороги в соответствии с положением/областью дороги, и информацию, указывающую тип каждой дороги, ширину каждой дороги и геометрию дороги. В дорожной информации хранятся положение перекрестков, направления приближения перекрестков, тип перекрестка и другая информация, относящаяся к перекресткам, в связи с соответствующей идентификационной информацией по каждой дорожной связи. В дорожной информации также хранятся тип дороги, ширина дороги, геометрия дороги, разрешено ли движение вперед, соотношения преимущественного права проезда, разрешено ли пересечение (разрешен ли въезд на соседнюю полосу движения), предел ограничения скорости транспортного средства и другая информация, касающаяся дорог, в связи с соответствующей идентификационной информацией по каждой дорожной связи.
[0019] GPS 16 (сокращение от «система глобального позиционирования») обнаруживает позицию движения (широту и долготу) рассматриваемого транспортного средства во время движения.
[0020] Блок 2 управления автономным вождением содержит блок 21 генерации целевого маршрута движения, блок 22 получения информации о периферийных объектах, блок 23 генерации целевой скорости транспортного средства, блок 24 управления приводом, блок 25 управления торможением и блок 26 управления углом поворота руля.
[0021] Блок 21 генерации целевого маршрута движения принимает информацию от камеры 11 распознавания периферии, лидара/радара 12, карты 15 и GPS 16 в качестве входных данных и генерирует целевой маршрут движения для рассматриваемого транспортного средства.
[0022] Блок 22 получения информации о периферийных объектах принимает информацию от камеры 11 распознавания периферии и лидара/радара 12 в качестве входных данных и получает информацию о местоположении препятствия на маршруте движения рассматриваемого транспортного средства и информацию о местоположении препятствия, которое находится вне маршрута движения рассматриваемого транспортного средства.
[0023] Блок 23 генерации целевой скорости транспортного средства принимает информацию о целевом маршруте движения от блока 21 генерации целевого маршрута движения и информацию о местоположении периферийного объекта от блока 22 получения информации о периферийных объектах в качестве входных данных и генерирует целевую скорость рассматриваемого транспортного средства. В «блоке 23 генерации целевой скорости транспортного средства» вычисляется боковое отклонение до препятствия на пути движения рассматриваемого транспортного средства относительно целевого маршрута движения, также вычисляется боковое отклонение до препятствия, которое находится вне пути движения рассматриваемого транспортного средства, относительно целевого маршрута движения, и генерируется более низкая скорость для препятствия, имеющего меньшее боковое отклонение, чем для препятствия, имеющего большее боковое отклонение.
[0024] Блок 24 управления приводом принимает целевую скорость транспортного средства от блока 23 генерации целевой скорости транспортного средства в качестве входных данных, выводит значение команды управления приводом в соответствии с сервоуправлением скоростью и выводит результат такого выведения в привод 31 двигателя.
[0025] Блок 25 управления торможением принимает целевую скорость транспортного средства из блока 23 генерации целевой скорости транспортного средства в качестве входных данных, выводит значение команды управления торможением в соответствии с сервоуправлением скоростью и выводит результат такого выведения в гидравлический привод 32 тормоза.
[0026] В качестве способа выведения значения команды управления с использованием сервоуправления скоростью транспортного средства выполняют, например, управление с прямой связью плюс управление с обратной связью, которое сочетает в себе управление с прямой связью, соответствующее значению или скорости изменения целевых скоростей транспортного средства, и управление с обратной связью, соответствующее разности между целевой скоростью транспортного средства и текущей скоростью транспортного средства. При выполнении этого также следует принимать во внимание отклонение от целевого значения из-за уклонов дороги или тому подобного.
[0027] Блок 26 управления углом поворота руля принимает информацию о целевом маршруте движения от блока 21 генерации целевого маршрута движения в качестве входных данных и определяет целевой угол поворота руля так, чтобы рассматриваемое транспортное средство следовало по целевому маршруту движения рассматриваемого транспортного средства. Блок 26 управления углом поворота руля также выводит значение команды управления углом поворота руля, так что фактический угол поворота руля совпадает с целевым углом поворота руля, и выводит результат этого выведения в привод 33 поворота руля.
[0028] Исполнительные механизмы 3 включают в себя привод 31 двигателя, гидравлический привод 32 тормоза и привод 33 поворота руля.
[0029] Привод 31 двигателя является приводом, который принимает значение команды управления приводом от блока 24 управления приводом в качестве входного сигнала и управляет приводным усилием двигателя. В случае гибридного транспортного средства могут совместно использоваться привод двигателя и привод электродвигателя. В случае электрического автономного транспортного средства (беспилотного электромобиля) может использоваться привод электродвигателя.
[0030] Гидравлический привод 32 тормоза представляет собой гидроусилитель, который принимает значение команды управления торможением от блока 25 управления торможением в качестве входного сигнала и управляет гидравлическим тормозным усилием тормоза. В случае не оборудованного гидроусилителем транспортного средства с электроприводом может использоваться электроусилитель.
[0031] Привод 33 поворота руля представляет собой электродвигатель регулировки угла поворота руля, который принимает значение команды управления углом поворота руля от блока 26 управления углом поворота руля в качестве входного сигнала и управляет углом поворота руля.
Подробная конфигурация блока генерации целевой скорости транспортного средства
[0032] На фиг. 2 показана подробная конфигурация блока 23 генерации целевой скорости транспортного средства в устройстве для генерирования целевой скорости транспортного средства в первом варианте осуществления. Подробная конфигурация блока 23 генерации целевой скорости транспортного средства, приданного блоку 2 управления автономным вождением, будет описана ниже со ссылкой на фиг. 2.
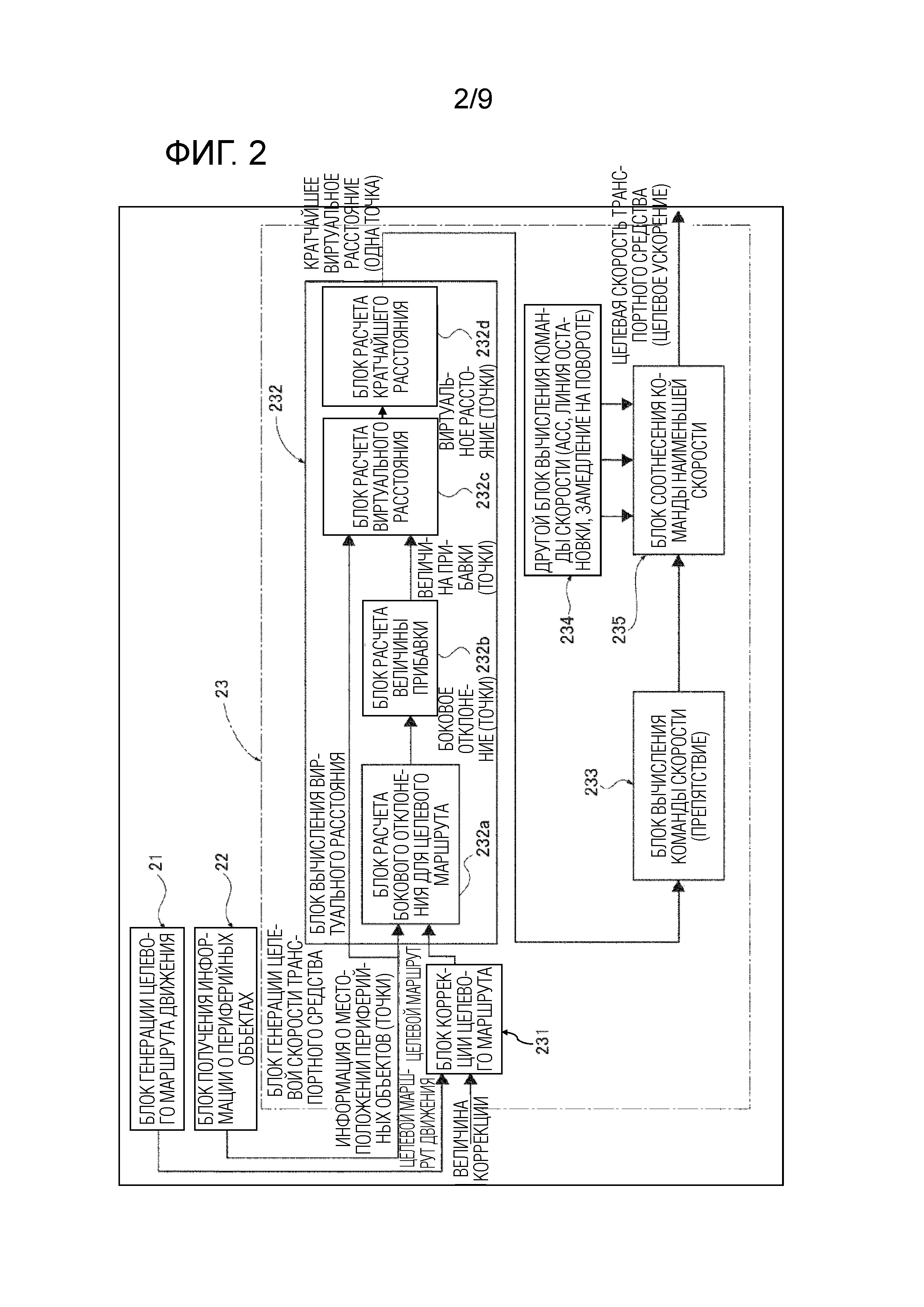
[0033] Блок 23 генерации целевой скорости транспортного средства содержит блок 231 коррекции целевого маршрута, блок 232 вычисления виртуального расстояния, блок 233 вычисления команды скорости, другой блок 234 вычисления команды скорости и блок 235 соотнесения команды наименьшей скорости, как показано на фиг. 2.
[0034] Блок 231 коррекции целевого маршрута принимает целевой маршрут движения и величину коррекции из блока 21 генерации целевого маршрута движения в качестве входных данных и генерирует целевой маршрут, в котором целевой маршрут движения скорректирован с использованием величины коррекции. «Целевой маршрут» используется в качестве информации о целевом маршруте движения во время расчета кратчайшего виртуального расстояния (одной точки) блоком 232 вычисления виртуального расстояния.
[0035] Блок 232 вычисления виртуального расстояния имеет блок 232a расчета бокового отклонения для проведения расчета бокового отклонения целевого маршрута, блок 232b расчета величины прибавки, блок 232c расчета виртуального расстояния и блок 232d расчета кратчайшего расстояния.
[0036] Блок 232a расчета бокового отклонения принимает информацию (точки) о местоположении периферийного объекта из блока 22 получения информации о периферийных объектах и целевой маршрут из блока 231 коррекции целевого маршрута в качестве входных данных и рассчитывает боковое отклонение между целевым маршрутом и препятствием.
[0037] Блок 232b расчета величины прибавки принимает боковое отклонение (точки) от блока 232a расчета бокового отклонения в качестве входных данных и рассчитывает величину прибавки к расстоянию вперед в соответствии с боковым отклонением.
[0038] Блок 232c расчета виртуального расстояния принимает информацию (точки) о местоположении периферийного объекта из блока 22 получения информации о периферийных объектах и величину прибавки (точки) из блока 232b расчета величины прибавки в качестве входных данных и прибавляет величину прибавки к фактическому расстоянию между рассматриваемым транспортным средством и препятствием для расчета виртуального расстояния.
[0039] Блок 232d расчета кратчайшего расстояния принимает виртуальное расстояние (точки) от блока 232c расчета виртуального расстояния в качестве входных данных, выбирает препятствие, для которого виртуальное расстояние является наименьшим, и рассчитывает кратчайшее виртуальное расстояние (одна точка).
[0040] Блок 233 вычисления команды скорости принимает кратчайшее виртуальное расстояние (одну точку) от блока 232d расчета кратчайшего расстояния блока 232 вычисления виртуального расстояния, создает соответствующий препятствию профиль скорости на основе кратчайшего виртуального расстояния и вычисляет значение команды скорости (препятствие) в соответствии с созданным профилем скорости.
[0041] Другой блок 234 вычисления команды скорости вычисляет значение команды скорости другого типа, чем вычисленная блоком 233 вычисления команды скорости (препятствие). Например, другой блок 234 вычисления команды скорости создает профиль скорости, соответствующий адаптивному круиз-контролю (ACC), на основе ACC и вычисляет значение команды скорости (ACC) в соответствии с созданным профилем скорости. В качестве другого примера, другой блок 234 вычисления команды скорости создает профиль скорости, соответствующий линии остановки, на основе линии остановки перед рассматриваемым транспортным средством и вычисляет значение команды скорости (линия остановки) в соответствии с созданным профилем скорости. В качестве еще одного примера, другой блок 234 вычисления команды скорости создает профиль скорости, соответствующий замедлению на повороте, исходя из крутого поворота перед рассматриваемым транспортным средством, и вычисляет значение команды скорости (замедление на повороте) в соответствии с созданным профилем скорости.
[0042] Блок 235 соотнесения команды наименьшей скорости выбирает в качестве целевой скорости транспортного средства наименьшее значение из множества значений команд скорости, вычисленных блоком 233 вычисления команд скорости и другим блоком 234 вычисления команды скорости. В дополнение к выбору наименьшего значения в качестве целевой скорости транспортного средства, блок 235 соотнесения команды наименьшей скорости одновременно выбирает величину ограничения ускорения/замедления, которая соответствует типу выбранной целевой скорости транспортного средства. В частности, когда значение команды скорости, вычисленное блоком 233 вычисления команд скорости (препятствие), выбирается блоком 235 соотнесения команды наименьшей скорости, целевая скорость транспортного средства (препятствие) генерируется на основе кратчайшего виртуального расстояния (одна точка).
[0043] Когда блок 235 соотнесения команды наименьшей скорости выбрал в качестве наименьшего значения значение команды скорости, вычисленное блоком 233 вычисления команд скорости (препятствие), целевая скорость транспортного средства (препятствие) генерируется так, как описано ниже в (a), (b) и (c).
[0044] (a) В отношении препятствия, для которого боковое отклонение относительно целевого маршрута движения равно или меньше предписанного значения, целевая скорость транспортного средства (препятствие) генерируется в соответствии с профилем скорости, который останавливает непосредственно перед препятствием.
[0045] (b) Степень регулировки целевой скорости транспортного средства (препятствие), которая соответствует боковому отклонению от целевого маршрута движения, изменяется в соответствии с расстоянием вперед между рассматриваемым транспортным средством и препятствием. В частности, целевая скорость транспортного средства (препятствие) уменьшается по мере того, как расстояние вперед между рассматриваемым транспортным средством и препятствием уменьшается в большей степени, чем в случае целевой скорости транспортного средства (препятствие), когда расстояние вперед между рассматриваемым транспортным средством и препятствием увеличивается.
[0046] (c) Степень регулировки целевой скорости транспортного средства (препятствие), которая соответствует боковому отклонению от целевого маршрута движения, изменяется в соответствии с пределом ограничения скорости транспортного средства на дороге. В частности, в случае препятствий, имеющих одинаковое боковое отклонение, целевая скорость транспортного средства (препятствие), когда дорога имеет высокий предел ограничения скорости транспортного средства, является большей, чем целевая скорость транспортного средства (препятствие), когда дорога имеет низкий предел ограничения скорости транспортного средства.
Конфигурация процесса управления скоростью
[0047] На фиг. 3 показана блок-схема последовательности операций процесса управления скоростью, в котором используется целевая скорость транспортного средства (препятствие), причем этот процесс управления скоростью выполняется блоком 2 управления автономным вождением в первом варианте осуществления. На фиг. 4 показан профиль скорости, сгенерированный в ходе процесса вычисления команды скорости на этапе S3 блок-схемы, показанной на фиг. 3. Конфигурация процесса управления скоростью, в котором используется целевая скорость транспортного средства (препятствие), описана ниже на основе фиг. 3 и 4.
[0048] Вначале описаны этапы, показанные на фиг. 3. После инициирования управления скоростью относительно периферийных препятствий распознают периферийное препятствие на этапе S1, и процесс переходит к этапу S2. На этапе S2 выполняют процесс вычисления виртуального расстояния (фиг. 5-7) (описанный ниже) на основе распознавания периферийного препятствия, и процесс переходит к этапу S3. На этапе S3 выполняют процесс вычисления команды скорости на основе кратчайшего виртуального расстояния (одной точки), полученного в процессе вычисления виртуального расстояния, и процесс переходит к этапу S4. На этапе S4 выполняют управление приводом, которое соответствует величине ограничения ускорения, на основе целевой скорости транспортного средства (препятствие), полученной в процессе вычисления команды скорости, и управление скоростью относительно периферийных препятствий заканчивается.
[0049] В процессе вычисления команды скорости на этапе S3 создают профиль скорости (то есть целевой профиль скорости транспортного средства), представляющий изменение целевой скорости транспортного средства (препятствие) при уменьшении с фиксированным замедлением α, на основе скорости инициирования замедления v0 и кратчайшего виртуального расстояния d, как показано на фиг. 4. Профиль скорости vtrgt(d) представлен следующей формулой:

В этом случае в качестве целевого ускорения устанавливают фиксированное замедление α. Управление приводом на основе целевой скорости транспортного средства (препятствие) выполняют так, чтобы получить целевое замедление, определенное в соответствии с целевым ускорением и величиной ограничения ускорения.
Конфигурация процесса вычисления виртуального расстояния
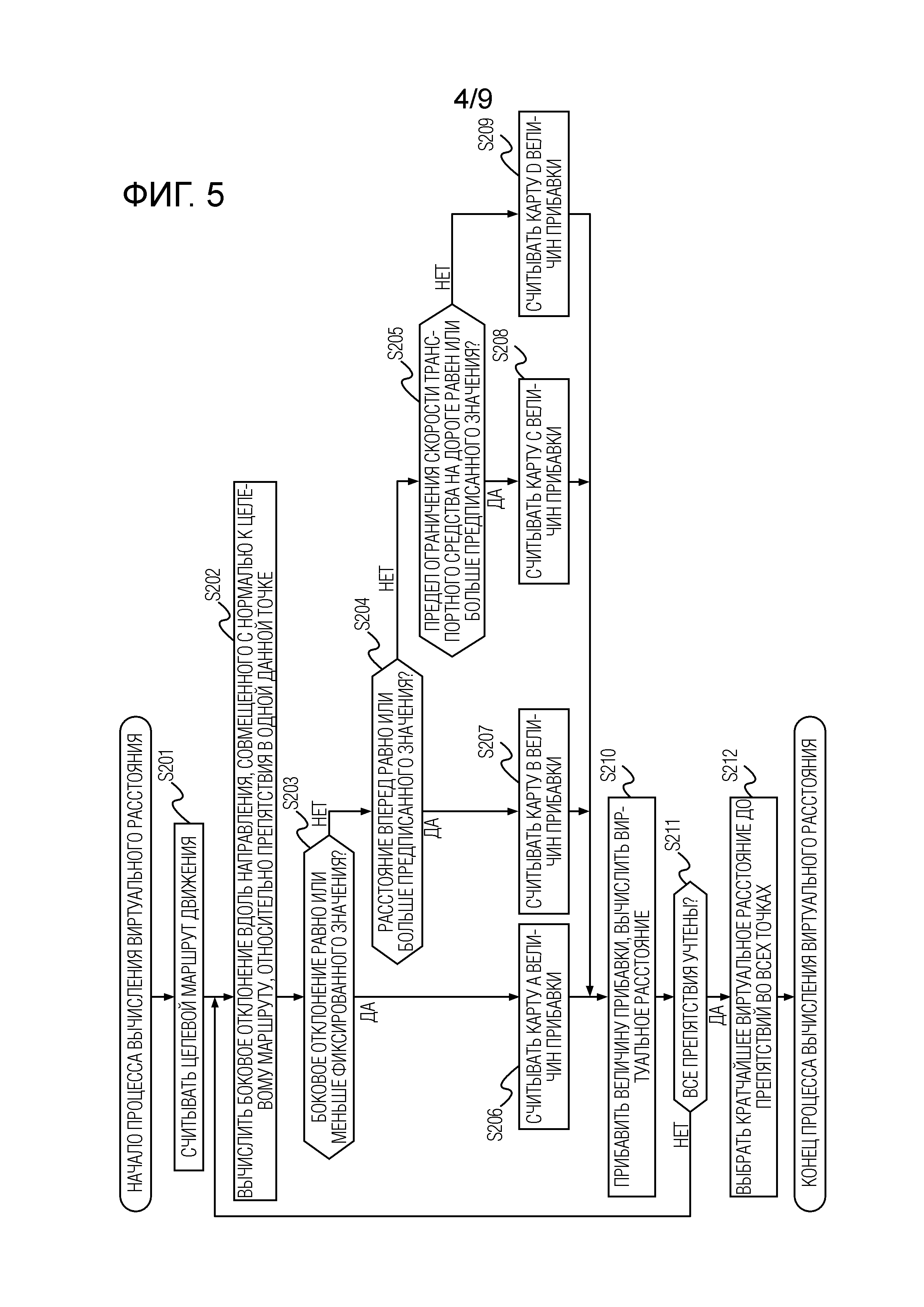
[0050] На фиг. 5 показана блок-схема последовательности операций процесса вычисления виртуального расстояния на этапе S2 блок-схемы, показанной на фиг. 3. На фиг. 6 и 7 показаны карты величин прибавки, используемые в этом процессе вычисления виртуального расстояния. Конфигурация процесса вычисления виртуального расстояния (конфигурация процесса в блоке 232 вычисления виртуального расстояния по фиг. 2) описана ниже на основе фиг. 5-7. Сначала описаны этапы на фиг. 5.
[0051] На этапе S201, исходя из начала процесса вычисления виртуального расстояния, считывают целевой маршрут движения, и процесс переходит к этапу S202.
[0052] На этапе S202, исходя из считывания на этапе S201 целевого маршрута движения или исходя из оценки на этапе S211, что не все препятствия были учтены, вычисляют боковое отклонение вдоль направления, совмещенного с нормалью к целевому маршруту, относительно препятствия в одной данной точке, и процесс переходит к этапу S203.
[0053] На этапе S203, исходя из вычисления на этапе S202 бокового отклонения, выполняют оценку того, является ли или нет боковое отклонение равным или меньшим фиксированного значения. Если ДА (боковое отклонение равно или меньше фиксированного значения), то процесс переходит к этапу S206; если НЕТ (боковое отклонение больше, чем фиксированное значение), то процесс переходит к этапу S204.
[0054] На этапе S204, исходя из оценки на этапе S203, что боковое отклонение больше, чем фиксированное значение, выполняют оценку того, является ли или нет расстояние вперед до препятствия равным или большим, чем предписанное значение. Если ДА (расстояние вперед равно или больше, чем предписанное значение), то процесс переходит к этапу S207; если НЕТ (расстояние вперед меньше, чем предписанное значение), то процесс переходит к этапу S205.
[0055] На этапе S205, исходя из оценки на этапе S204, что расстояние вперед меньше, чем предписанное значение, выполняют оценку того, является ли предел ограничения скорости транспортного средства на дороге, по которой движется рассматриваемое транспортное средство, равным или большим предписанного значения. Если ДА (предел ограничения скорости транспортного средства на дороге равен или больше, чем предписанное значение), то процесс переходит к этапу S208; если НЕТ (предел ограничения скорости транспортного средства на дороге меньше, чем предписанное значение), то процесс переходит к этапу S209.
[0056] На этапе S206, исходя из оценки на этапе S203, что боковое отклонение равно или меньше фиксированного значения, считывают карту A величин прибавки, устанавливают величину прибавки равной нулю, и процесс переходит к этапу S210. «Карта A величин прибавки» такова, что нулевая величина прибавки используется тогда, когда боковое отклонение равно или меньше фиксированного значения, как показано на фиг. 6.
[0057] На этапе S207, исходя из оценки на этапе S204, что расстояние вперед равно или больше, чем предписанное значение, считывают карту B величин прибавки, увеличивают величину прибавки соответственно с увеличением бокового отклонения, и процесс переходит к этапу S210. Поскольку разрешение датчика низкое, когда расстояние вперед равно или больше, чем предписанное значение, «карта B величин прибавки» применяется в соответствии с характеристикой чувствительности ниже, чем на карте A величин прибавки (характеристика, показанная как пунктирными линиями), как показано на фиг. 6, причем карта A величин прибавки относится к случаям, когда расстояние вперед меньше, чем предписанное значение.
[0058] На этапе S208, исходя из оценки на этапе S205, что предел ограничения скорости транспортного средства на дороге равен или больше, чем предписанное значение, считывают карту C величин прибавки, увеличивают величину прибавки соответственно увеличению бокового отклонения, и процесс переходит к этапу S210. «Карта C величин прибавки» применяется в соответствии с характеристикой более высокой чувствительности, чем на карте D величин прибавки (характеристика большей величины прибавки для того же самого бокового отклонения), как показано на фиг. 7, причем карта D величин прибавки выбирается в городских районах и т.д. Это связано с необходимостью максимально возможного подавления внезапного замедления в случае высокоскоростной дороги и т.д., где предел ограничения скорости транспортного средства на дороге равен или больше, чем предписанное значение.
[0059] На этапе S209, исходя из оценки на этапе S205, что предел ограничения скорости транспортного средства на дороге меньше, чем предписанное значение, считывают карту D величин прибавки, увеличивают величину прибавки соответственно увеличению бокового отклонения, и процесс переходит к этапу S210. «Карта D величин прибавки» применяется в соответствии с характеристикой более низкой чувствительности, чем на карте C величин прибавки (характеристика уменьшенной величины прибавки для того же самого бокового отклонения), как показано на фиг. 7, причем карта C величин прибавки выбирается в случае высокоскоростных дорог и т.д. Это связано с установлением приоритета избегания препятствий в случае городских районов и т.д., где предел ограничения скорости транспортного средства на дороге меньше, чем предписанное значение.
[0060] На этапе S210, исходя из расчета на этапе S206, этапе S207, этапе S208 или этапе S209 величины прибавки, вычисляют виртуальное расстояние путем сложения величины прибавки с расстоянием вперед от рассматриваемого транспортного средства до препятствия, и процесс переходит к этапу S211.
[0061] На этапе S211, исходя из вычисления на этапе S210 виртуального расстояния, выполняют оценку того, были ли учтены все препятствия. Если ДА (все препятствия были учтены), то процесс переходит к этапу S212; если НЕТ (не все препятствия были учтены), то процесс возвращается к этапу S202.
[0062] На этапе S212, исходя из оценки на этапе S211, что все препятствия были учтены, выбирают самое короткое из всех виртуальных расстояний до препятствий, и процесс вычисления виртуального расстояния заканчивается.
[0063] Таким образом, величину прибавки рассчитывают следующим образом блоком 232b расчета величины прибавки блока 232 вычисления виртуального расстояния на фиг. 2.
(a) Когда боковое отклонение между целевым маршрутом движения и препятствием равно верхнему граничному значению или меньше его, величину прибавки устанавливается равной нулю.
(b) Величина прибавки изменяется в соответствии с пределом ограничения скорости движения на дороге. Величина прибавки увеличивается на тех дорогах, где предел ограничения скорости транспортного средства является высоким, и уменьшается на тех дорогах, где предел ограничения скорости транспортного средства является низким.
(c) Величина прибавки изменяется в соответствии с расстоянием вперед от рассматриваемого транспортного средства. Величина прибавки уменьшается, когда препятствие находится на коротком расстоянии от рассматриваемого транспортного средства. Величина прибавки увеличивается по мере увеличения расстояния вперед между рассматриваемым транспортным средством и препятствием.
[0064] Далее описан принцип действия изобретения. Ниже описана работа в первом варианте осуществления и, в частности, разделена на «Операцию генерирования целевой скорости транспортного средства в сравнительном примере», «Операцию процесса генерирования целевой скорости транспортного средства», «Операцию управления скоростью, когда рассматриваемое транспортное средство движется достаточно далеко от расположенного сбоку препятствия» и «Операция управления скоростью, когда рассматриваемое транспортное средство движется рядом с расположенным сбоку препятствием».
Операция генерирования целевой скорости транспортного средства в сравнительном примере
[0065] На фиг. 8 показана операция управления скоростью в сравнительном примере, когда присутствует препятствие впереди на пути движения рассматриваемого транспортного средства, а сбоку от пути движения рассматриваемого транспортного средства присутствует стена (препятствие). На фиг. 9 показана операция управления скоростью в сравнительном примере, когда присутствует препятствие впереди на пути движения рассматриваемого транспортного средства, но нет стены (препятствия) сбоку от пути движения рассматриваемого транспортного средства. Операция генерирования целевой скорости транспортного средства в сравнительном примере описана ниже на основе фиг. 8 и 9.
[0066] Сначала в сравнительном примере составляется план скорости транспортного средства в соответствии с целевой скоростью транспортного средства на основе оставшейся ширины дороги с учетом только препятствий на пути движения рассматриваемого транспортного средства.
[0067] В сравнительном примере внимание уделяется только препятствиям (остановившимся транспортным средствам и т.д.) на пути движения рассматриваемого транспортного средства, а стены (препятствия), которые расположены сбоку и находятся вне пути движения рассматриваемого транспортного средства, полностью игнорируются. Поэтому, когда оставшаяся ширина дороги из-за препятствия на пути движения рассматриваемого транспортного средства является одинаковой, составляется план скорости транспортного средства, выведенный из целевой скорости транспортного средства, которая уменьшается аналогичным образом независимо от того, присутствует ли или нет стена (препятствие) сбоку от пути движения рассматриваемого транспортного средства.
[0068] Следовательно, когда по обеим сторонам от пути движения рассматриваемого транспортного средства присутствуют стены, как показано на фиг. 8, замедление рассматриваемого транспортного средства недостаточно, и достигается скорость, превышающая намеченную пассажиром скорость, независимо от наличия стенок с обеих сторон от пути движения рассматриваемого транспортного средства. Поэтому, когда рассматриваемое транспортное средство проезжает по дороге, где с обеих сторон имеются стены, пассажир в рассматриваемом транспортном средстве будет испытывать неестественное чувство, что расположенные сбоку стены кажутся приближающимися.
[0069] И наоборот, когда нет стен с двух сторон от пути движения рассматриваемого транспортного средства, как показано на фиг. 9, замедление рассматриваемого транспортного средства чрезмерно, и достигается скорость меньшая, чем намеченная пассажиром скорость, независимо от отсутствия стен с двух сторон от пути движения рассматриваемого транспортного средства. Поэтому, когда рассматриваемое транспортное средство проезжает по дороге, где нет никаких препятствий, пассажир в рассматриваемом транспортном средстве будет чувствовать, что движение является нежелательно медленным.
[0070] В случае транспортного средства с содействием вождению, такого как транспортное средство автономного вождения, «дискомфорт от того, что расположенные сбоку стены кажутся приближающимися», и «чувство, что движение нежелательно медленное», являются неприятными ощущениями, потому что они не подразумевались каким-либо пассажиром, включая водителя, и не вызваны манипуляциями с акселератором или тормозом со стороны водителя.
[0071] В случае сравнительного примера, который основан на оставшейся ширине дороги и учитывает только препятствия, присутствующие на пути движения, если дорога широкая, но препятствие присутствует сбоку, пассажир будет испытывать неестественное чувство, что расположенное сбоку препятствие кажется приближающимся. Кроме того, если дорога узкая, но сбоку нет препятствий, пассажир будет чувствовать, что движение нежелательно медленное из-за замедления сверх того, что необходимо.
Операция процесса генерирования целевой скорости транспортного средства
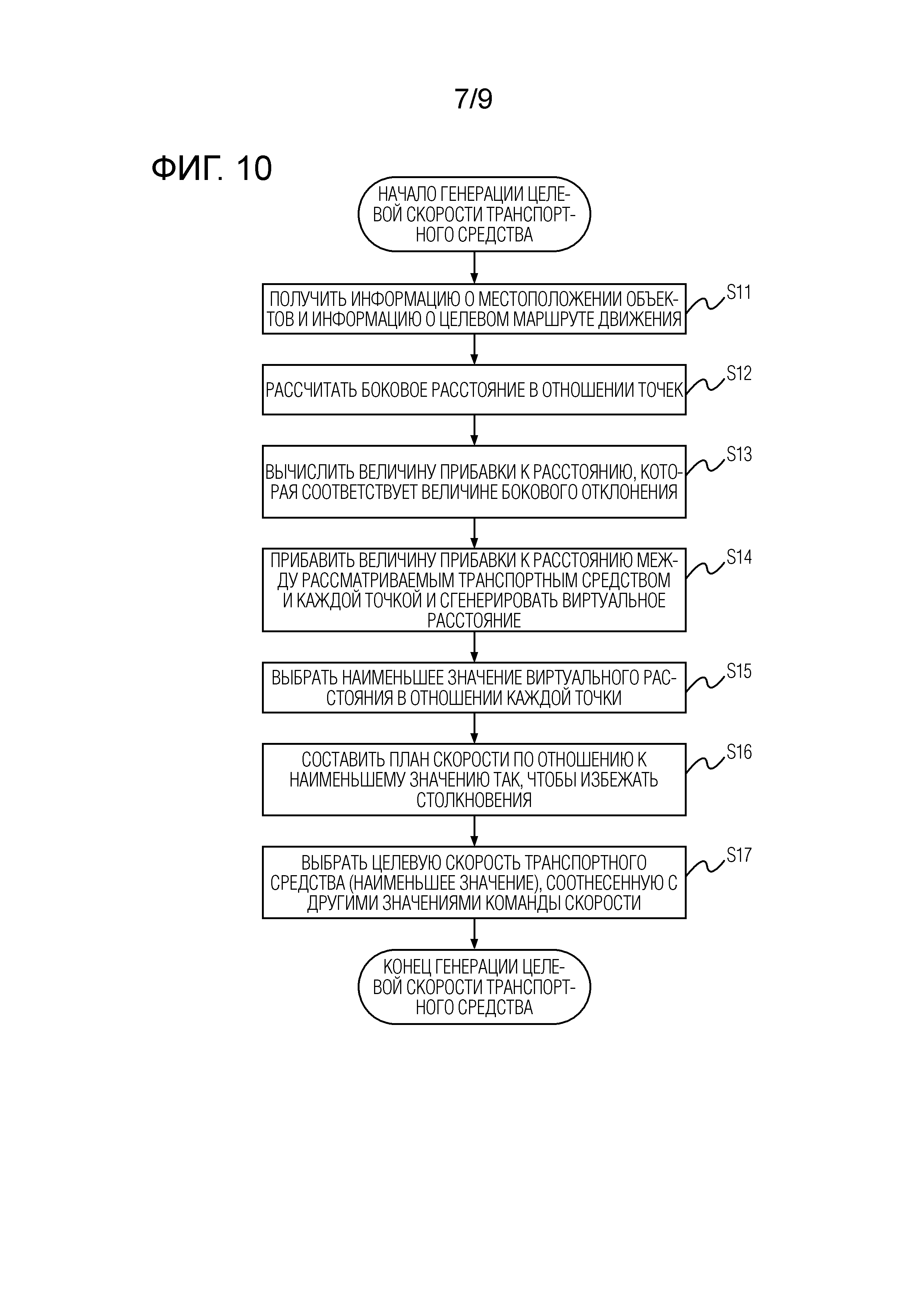
[0072] На фиг. 10 показана последовательность операций процесса генерирования целевой скорости транспортного средства, выполняемых блоком 2 управления автономным вождением в первом варианте осуществления. Этапы на фиг. 10 описаны ниже.
[0073] На этапе S11, после инициирования генерации целевой скорости транспортного средства, получают информацию о местоположении объекта и информацию о целевом маршруте движения, и процесс переходит к этапу S12. «Информацию о местоположении объекта» получают из блока 22 получения информации о периферийных объектах. «Информацию о целевом маршруте движения» получают из блока 21 генерации целевого маршрута движения.
[0074] На этапе S12, исходя из получения на этапе S11 информации о местоположении объекта и информации о целевом маршруте движения, рассчитывают боковое отклонение для каждой точки, и процесс переходит к этапу S13. «Расчет бокового отклонения для каждой точки» выполняется блоком 232a расчета бокового отклонения блока 232 вычисления виртуального расстояния.
[0075] На этапе S13, исходя из расчета на этапе S12 бокового отклонения для каждой точки, вычисляют величину прибавки к расстоянию вперед, которая соответствует величине бокового отклонения, и процесс переходит к этапу S14. «Величина прибавки к расстоянию вперед, которая соответствует величине бокового отклонения», вычисляется блоком 232b расчета величины прибавки блока 232 вычисления виртуального расстояния.
[0076] На этапе S14, исходя из вычисления на этапе S13 величины прибавки к расстоянию, которая соответствует величине бокового отклонения, величину прибавки прибавляют к расстоянию вперед (фактическому расстоянию вперед) между рассматриваемым транспортным средством и каждой точкой, генерируют виртуальное расстояние, и процесс переходит к этапу S15. «Виртуальное расстояние» рассчитывается блоком 232c расчета виртуального расстояния блока 232 вычисления виртуального расстояния.
[0077] На этапе S15, исходя из генерации на этапе S14 виртуальных расстояний, выбирают наименьшее значение виртуальных расстояний для каждой точки, и процесс переходит к этапу S16. «Выбор наименьшего значения виртуальных расстояний для каждой точки» выполняется блоком 232d расчета кратчайшего расстояния блока 232 вычисления виртуального расстояния.
[0078] На этапе S16, исходя из выбора на этапе S15 наименьшего значения виртуальных расстояний для каждой точки, составляют план скорости транспортного средства относительно наименьшего значения так, чтобы избежать столкновения, и процесс переходит к этапу S17. «Составление плана скорости транспортного средства относительно наименьшего значения» выполняется блоком 233 вычисления команды скорости (препятствие) блока 23 генерации целевой скорости транспортного средства.
[0079] На этапе S17, исходя из составления на этапе S16 плана скорости относительно наименьшего значения, выбирают целевую скорость транспортного средства (наименьшее значение) согласно соотнесению с другими значениями команды скорости, и генерация целевой скорости транспортного средства заканчивается. «Выбор целевой скорости транспортного средства согласно соотнесению с другими значениями команд скорости» выполняется блоком 235 соотнесения команды наименьшей скорости блока 23 генерации целевой скорости транспортного средства.
[0080] Таким образом, когда начинается генерация целевой скорости транспортного средства, этапы проходят в таком порядке: этап S11 → этап S12 → этап S13 → этап S14 → этап S15 → этап S16 → этап S17, и затем генерация целевой скорости транспортного средства заканчивается. В частности, план скорости транспортного средства составляется с учетом препятствий, находящихся спереди и сбоку, на основе взаимного пространственного расположения рассматриваемого транспортного средства и находящихся спереди и сбоку препятствий, а также величины бокового отклонения между препятствиями и целевым маршрутом движения, что позволяет расширить сценарии, в которых возможно движение с подходящей скоростью.
Операция управления скоростью, когда рассматриваемое транспортное средство движется достаточно далеко от расположенного сбоку препятствия
[0081] На фиг. 11 показана операция управления скоростью в случае, когда рассматриваемое транспортное средство движется достаточно далеко от расположенного сбоку препятствия, когда впереди на пути движения рассматриваемого транспортного средства (слегка изогнутая дорога) имеется препятствие и присутствует стена (препятствие) сбоку от пути движения рассматриваемого транспортного средства в первом варианте осуществления. Операция управления скоростью, когда рассматриваемое транспортное средство движется достаточно далеко от расположенного сбоку препятствия, описана ниже со ссылкой на фиг. 11.
[0082] У остановившегося транспортного средства (препятствия) перед рассматриваемым транспортным средством на пути движения рассматриваемого транспортного средства (слегка изогнутая дорога) правая задняя конечная точка обозначена как E1, центральная задняя конечная точка обозначена как E2, а левая задняя конечная точка обозначена как E3. Кроме того, у левой стены (препятствия) сбоку от рассматриваемого транспортного средства положения рядом с рассматриваемым транспортным средством обозначены как точки F1, F2, F3, F4, F5, F6 и F7.
[0083] При этом для правой задней конечной точки E1 величина прибавки, для которой величина бокового отклонения является наименьшей в виртуальном расстоянии (то есть расстояние вперед плюс величина прибавки), уменьшена, в результате чего виртуальное расстояние сделано по существу равным расстоянию вперед. Для центральной задней конечной точки E2 и левой задней конечной точки E3 величины прибавки увеличиваются соразмерно с увеличением величины бокового отклонения от правой задней конечной точки E1, так что виртуальные расстояния для E1, E2 и E3 имеют соотношение E1 < E2 < E3.
[0084] Для точек F1, F2, F3, F4, F5, F6 и F7 на левой стене (препятствии) величины прибавки в виртуальном расстоянии (то есть расстояние вперед плюс величина прибавки) приблизительно постоянны, потому что боковые отклонения приблизительно одинаковы, в результате чего виртуальное расстояние сделано соответствующим длине расстояния вперед. Таким образом, виртуальные расстояния имеют соотношение F1 < F2 < F3 < F4 < F5 < F6 < F7.
[0085] Поскольку рассматриваемое транспортное средство движется достаточно далеко от расположенной сбоку левой стены, величины виртуального отклонения от точек F1, F2, F3, F4, F5, F6 и F7 являются большими, и величины прибавки увеличиваются. Следовательно, соотношение между виртуальными расстояниями для всех точек E1, E2, E3, F1, F2, F3, F4, F5, F6 и F7 имеет вид: E1 < E2 < E3 < F1 < F2 < F3 < F4 < F5 < F6 < F7, как показано на фиг. 11. Таким образом, кратчайшее виртуальное расстояние - это задняя правая конечная точка E1 остановившегося транспортного средства.
[0086] В результате, в ситуации, когда рассматриваемое транспортное средство движется достаточно далеко от расположенной сбоку левой стены, и пассажиры рассматриваемого транспортного средства не испытывают неестественное чувство, что расположенная сбоку левая стена кажется приближающейся, когда рассматриваемое транспортное средство проезжает по дороге, составляется план скорости транспортного средства, в котором замедление не повышено по отношению к задней правой концевой точке E1 остановившегося транспортного средства. Следовательно, не происходит замедления сверх того, что необходимо, и гарантируется, что рассматриваемое транспортное средство будет проходить сбоку от остановившегося транспортного средства при соответственно замедленном движении.
Операция управления скоростью, когда рассматриваемое транспортное средство движется вблизи расположенного сбоку препятствия
[0087] На фиг. 12 показана операция управления скоростью в случае, когда рассматриваемое транспортное средство движется рядом с расположенным сбоку препятствием, когда впереди на пути движения рассматриваемого транспортного средства (слегка изогнутая дорога) имеется препятствие и присутствует стена (препятствие) сбоку от пути движения рассматриваемого транспортного средства в первом варианте осуществления. Операция управления скоростью, когда рассматриваемое транспортное средство движется вблизи расположенного сбоку препятствия, описана ниже со ссылкой на фиг. 12.
[0088] У остановившегося транспортного средства (препятствия) перед рассматриваемым транспортным средством на пути движения рассматриваемого транспортного средства (слегка изогнутая дорога) правая задняя конечная точка обозначена как E1, центральная задняя конечная точка обозначена как E2, а левая задняя конечная точка обозначена как E3. Кроме того, у левой стены (препятствия) сбоку от рассматриваемого транспортного средства положения рядом с рассматриваемым транспортным средством обозначены как точки F1, F2, F3, F4, F5, F6 и F7.
[0089] При этом для правой задней конечной точки E1 величина прибавки, для которой величина бокового отклонения является наименьшей в виртуальном расстоянии (то есть расстояние вперед плюс величина прибавки), уменьшена, в результате чего виртуальное расстояние сделано по существу равным расстоянию вперед. Для центральной задней конечной точки E2 и левой задней конечной точки E3 величины прибавки увеличиваются соразмерно с увеличением величины бокового отклонения от правой задней конечной точки E1, так что виртуальные расстояния для E1, E2 и E3 имеют соотношение E1 < E2 < E3.
[0090] Для точек F1, F2, F3, F4, F5, F6 и F7 на левой стене (препятствии) величины прибавки в виртуальном расстоянии (то есть расстояние вперед плюс величина прибавки) приблизительно постоянны, потому что боковые отклонения приблизительно одинаковы, в результате чего виртуальное расстояние сделано соответствующим длине расстояния вперед. Таким образом, виртуальные расстояния имеют соотношение F1 < F2 < F3 < F4 < F5 < F6 < F7.
[0091] Поскольку рассматриваемое транспортное средство движется в положении возле расположенной сбоку левой стены, величины виртуального отклонения от точек F1, F2, F3, F4, F5, F6 и F7 малы, и величины прибавки уменьшаются. Следовательно, соотношение между виртуальными расстояниями для всех точек E1, E2, E3, F1, F2, F3, F4, F5, F6 и F7 имеет вид: F1 < F2 < E1 < F3 < E2 < E3 < F4 < F5 < F6 < F7, как показано на фиг. 12. Таким образом, кратчайшее виртуальное расстояние - это точка F1, в которой расстояние между левой стенкой и рассматриваемым транспортным средством является самым коротким.
[0092] В результате, в ситуации, когда рассматриваемое транспортное средство движется вблизи расположенной сбоку левой стены, и пассажиры рассматриваемого транспортного средства не испытывают неестественное чувство, что расположенная сбоку левая стена кажется приближающейся, когда рассматриваемое транспортное средство проезжает по дороге, составляется план скорости транспортного средства, в котором замедление не повышено по отношению к точке F1, в которой расстояние между левой стеной и рассматриваемым транспортным средством является наименьшим. Следовательно, гарантируется, что рассматриваемое транспортное средство будет проходить сбоку от остановившегося транспортного средства при соответственно замедленном движении, при котором расположенная сбоку левая стенка не кажется приближающейся.
[0093] Ниже описаны эффекты изобретения. В способе и устройстве для генерирования целевой скорости транспортного средства с содействием вождению в первом варианте осуществления получены перечисленные ниже эффекты.
[0094] (1) Способ генерирования целевой скорости транспортного средства с содействием вождению (транспортного средства автономного вождения), включающий в себя генерирование целевой скорости рассматриваемого транспортного средства в соответствии с препятствием, которое препятствует движению рассматриваемого транспортного средства. Генерируют целевой маршрут движения рассматриваемого транспортного средства. Получают информацию о местоположении, относящуюся к препятствию на пути движения рассматриваемого транспортного средства, и информацию о местоположении, относящуюся к препятствию, которое расположено сбоку и находится вне пути движения рассматриваемого транспортного средства. Вычисляют боковое отклонение до препятствия на пути движения рассматриваемого транспортного средства относительно целевого маршрута движения и боковое отклонение до препятствия, которое находится вне пути движения рассматриваемого транспортного средства, относительно целевого маршрута движения. Генерируют более низкую целевую скорость транспортного средства для препятствия, имеющего меньшее боковое отклонение, чем для препятствия, имеющего большее боковое отклонение (фиг. 1). Следовательно, можно обеспечить способ генерирования целевой скорости транспортного средства с содействием вождению (транспортного средства автономного вождения), в котором во время движения с содействием вождению (автономного вождения) у пассажира предотвращаются неприятные ощущения независимо от того, есть ли или нет препятствия сбоку от пути движения рассматриваемого транспортного средства. В частности, можно управлять скоростью с учетом не только препятствия в полосе движения, но и препятствия сбоку, так что рассматриваемое транспортное средство замедляется, когда вблизи боковой стороны имеется препятствие. Таким образом, учитывание препятствия, присутствующего сбоку от маршрута движения рассматриваемого транспортного средства, позволяет составить план скорости транспортного средства, который соответствует фактическому состоянию движения.
[0095] (2) При генерировании целевой скорости транспортного средства относительно препятствия, для которого боковое отклонение относительно целевого маршрута движения равно или меньше предписанного значения, целевую скорость транспортного средства генерируют в соответствии с профилем скорости, который останавливает непосредственно перед препятствием (блок 23 генерации целевой скорости транспортного средства; фиг. 4). Поэтому, в дополнение к эффекту в вышеприведенном пункте (1), если на целевом маршруте движения, а также поблизости (в пределах диапазона ширины транспортного средства) присутствуют препятствия, можно добиться замедления, подходящего для расстояния по пути вперед между рассматриваемым транспортным средством и препятствием и для остановки непосредственно перед препятствием, когда такое препятствие является неподвижным объектом.
[0096] (3) При генерировании целевой скорости транспортного средства степень регулировки целевой скорости транспортного средства, которая соответствует боковому отклонению от целевого маршрута движения, изменяют в соответствии с расстоянием вперед между рассматриваемым транспортным средством и препятствием, так что по мере того, как расстояние вперед между рассматриваемым транспортным средством и препятствием уменьшается, целевая скорость транспортного средства уменьшается в большей степени, чем в случае целевой скорости транспортного средства при увеличении расстояния вперед между рассматриваемым транспортным средством и препятствием (блок 23 генерации целевой скорости транспортного средства; фиг. 6). Поэтому, в дополнение к эффектам в вышеприведенных пунктах (1) и (2), можно управлять скоростью так, чтобы соответствовать характеристикам датчиков. В частности, регулировка целевой скорости транспортного средства, которая соответствует боковому отклонению, почти не используется по отношению к тому препятствию, которое находится далеко от рассматриваемого транспортного средства, потому что точность бокового положения низка. Наоборот, регулировка целевой скорости транспортного средства, которая соответствует боковому отклонению, используется в отношении того препятствия, которое находится рядом с рассматриваемым транспортным средством, потому что точность бокового положения высока. Это позволяет добиться управления скоростью с большей степенью достоверности.
[0097] (4) При генерировании целевой скорости транспортного средства степень регулировки целевой скорости транспортного средства, которая соответствует боковому отклонению от целевого маршрута движения, изменяют в соответствии с пределом ограничения скорости транспортного средства на дороге, так что в случае препятствий, имеющих одинаковое боковое отклонение, целевую скорость транспортного средства, когда дорога имеет высокий предел ограничения скорости транспортного средства, делают более высокой, чем целевая скорость транспортного средства, когда дорога имеет низкий предел ограничения скорости транспортного средства (блок 23 генерации целевой скорости транспортного средства; фиг. 7). Поэтому, в дополнение к эффектам в вышеприведенных пунктах (1)-(3), можно предотвратить чрезмерное замедление при движении по высокоскоростным дорогам и предотвратить недостаточное замедление при движении по городским районам.
[0098] (5) При генерировании целевой скорости транспортного средства рассчитывают боковое отклонение между целевым маршрутом движения и препятствием (блок 232a расчета бокового отклонения), рассчитывают величину прибавки к расстоянию вперед в соответствии с боковым отклонение (блок 232b расчета величины прибавки), рассчитывают виртуальное расстояние путем сложения величины прибавки с фактическим расстоянием между препятствием и рассматриваемым транспортным средством (блок 232c расчета виртуального расстояния) и генерируют целевую скорость транспортного средства на основе этого виртуального расстояния (блок 23 генерации целевой скорости транспортного средства; фиг. 4). Поэтому, в дополнение к эффектам в вышеприведенных пунктах (1)-(4), отработка виртуальных расстояний позволяет упростить генерацию целевой скорости транспортного средства и управление скоростью.
[0099] (6) При генерировании целевой скорости транспортного средства выбирают препятствие, для которого рассчитанное виртуальное расстояние относительно препятствий является наименьшим, рассчитывают кратчайшее виртуальное расстояние (блок 232d расчета кратчайшего расстояния) и генерируют целевую скорость транспортного средства на основе кратчайшего виртуального расстояния (блок 23 генерации целевой скорости транспортного средства; фиг. 2). Поэтому, в дополнение к эффекту в вышеприведенном пункте (5), можно уменьшить количество расчетов скорости и снизить вычислительную нагрузку. В частности, это связано с тем, что нет необходимости генерировать целевые скорости транспортного средства в отношении виртуальных расстояний до препятствий, обсчитываемых блоком 232c расчета виртуального расстояния.
[0100] (7) При расчете величины прибавки увеличивают величину прибавки, если боковое отклонение между целевым маршрутом движения и препятствием является большим, чем предписанное отклонение, и уменьшают величину прибавки, если боковое отклонение меньше, чем предписанное отклонение (блок 232b расчета величины прибавки; фиг. 6). Поэтому, в дополнение к эффекту в вышеприведенном пункте (5) или (6), можно расставить приоритеты в соответствии с амплитудой боковых отклонений относительно препятствий. Кроме того, можно регулировать величину замедления в соответствии с картой величин прибавки в зависимости от бокового отклонения.
[0101] (8) При расчете величины прибавки устанавливают величину прибавки равной нулю, когда боковое отклонение между целевым маршрутом движения и препятствием равно или меньше фиксированного значения (блок 232b расчета величины прибавки; фиг. 6). Поэтому, в дополнение к эффектам в вышеприведенных пунктах (5)-(7), можно добиться полной остановки непосредственно перед препятствием, учитывая ширину транспортного средства и дополнительное пространство.
[0102] (9) При расчете величины прибавки изменяют величину прибавки в соответствии с пределом ограничения скорости транспортного средства на дороге, так что величину прибавки увеличивают на дорогах, имеющих высокие пределы ограничения скорости транспортного средства, и величину прибавки уменьшают на дорогах с низкими пределами ограничения скорости транспортного средства (блок 232b расчета величины прибавки; фиг. 7). Поэтому, в дополнение к эффектам в вышеприведенных пунктах (5)-(8), можно предотвратить чрезмерное замедление во время движения по высокоскоростным дорогам и предотвратить недостаточное замедление во время движения по городским районам.
[0103] (10) При расчете величины прибавки изменяют величину прибавки в соответствии с расстоянием вперед от рассматриваемого транспортного средства, так что величину прибавки уменьшают, когда препятствие находится на коротком расстоянии от рассматриваемого транспортного средства, и величину прибавки увеличивают по мере того, как увеличивается расстояние вперед между рассматриваемым транспортным средством и препятствием (блок 232b расчета величины прибавки; фиг. 6). Поэтому, в дополнение к эффектам в вышеприведенных пунктах (5)-(9), можно управлять скоростью в соответствии с характеристиками датчиков. В частности, регулировка целевой скорости транспортного средства, которая соответствует боковому отклонению, почти не используется по отношению к тому препятствию, которое находится далеко от рассматриваемого транспортного средства, потому что точность бокового положения низка. Наоборот, регулировка целевой скорости транспортного средства, которая соответствует боковому отклонению, используется в отношении того препятствия, которое находится рядом с рассматриваемым транспортным средством, потому что точность бокового положения высока. Это позволяет добиться управления скоростью с большей степенью достоверности.
[0104] (11) Устройство для генерирования целевой скорости транспортного средства с содействием вождению (транспортного средства автономного вождения), оборудованного контроллером (блоком 2 управления автономным вождением) для генерирования целевой скорости рассматриваемого транспортного средства в соответствии с препятствием, которое препятствует движению рассматриваемого транспортного средства, причем контроллер (блок 2 управления автономным вождением) содержит блок 21 генерации целевого маршрута движения, блок 22 получения информации о периферийных объектах и блок 23 генерации целевой скорости транспортного средства. Блок 21 генерации целевого маршрута движения генерирует целевой маршрут движения рассматриваемого транспортного средства. Блок 22 получения информации о периферийных объектах получает информацию о местоположении, относящуюся к препятствию на пути движения рассматриваемого транспортного средства, и информацию о местоположении, относящуюся к препятствию, которое расположено сбоку и находится вне пути движения рассматриваемого транспортного средства. Блок 23 генерации целевой скорости транспортного средства вычисляет боковое отклонение до препятствия на пути движения рассматриваемого транспортного средства относительно целевого маршрута движения, вычисляет боковое отклонение до препятствия, которое находится вне пути движения рассматриваемого транспортного средства, относительно целевого маршрута движения и генерирует более низкую целевую скорость транспортного средства для препятствия, имеющего меньшее боковое отклонение, чем для препятствия, имеющего большее боковое отклонение (фиг. 1). Поэтому можно предоставить устройство для генерирования целевой скорости транспортного средства с содействием вождению (транспортного средства автономного вождения), в котором во время движения с содействием вождению (автономного вождения) у пассажира предотвращаются неприятные ощущения независимо от того, есть ли или нет препятствие сбоку от пути движения рассматриваемого транспортного средства.
[0105] Выше было описано устройство для генерирования целевой скорости транспортного средства с содействием вождению по настоящему раскрытию со ссылкой на первый вариант осуществления. Однако его конкретная конфигурация не ограничена таковой в первом варианте осуществления; конструктивные модификации, дополнения и т.д. возможны без отклонения от сущности изобретения, изложенной в прилагаемой формуле изобретения.
[0106] В первом варианте осуществления остановившееся транспортное средство, которое остановлено на маршруте движения рассматриваемого транспортного средства, было приведено в качестве примера препятствия на пути движения рассматриваемого транспортного средства. Однако препятствия на пути движения рассматриваемого транспортного средства также включают установки (конструкции), размещенные на пути движения рассматриваемого транспортного средства, транспортные средства, движущиеся медленно в той же полосе, что и рассматриваемое транспортное средство, и т.д. В первом варианте осуществления стена, установленная вдоль маршрута движения рассматриваемого транспортного средства, была приведена в качестве примера препятствия, находящегося вне пути движения рассматриваемого транспортного средства. Однако препятствия, которые находятся вне пути движения рассматриваемого транспортного средства, также включают разделительные полосы, транспортные средства, движущиеся в полосе встречного движения относительно рассматриваемого транспортного средства, и т.д.
[0107] В первом варианте осуществления блок 23 генерации целевой скорости транспортного средства был описан как содержащий блок 232 вычисления виртуального расстояния, который имеет блок 232a расчета бокового отклонения, блок 232b расчета величины прибавки и блок 232с расчета виртуального расстояния. Однако еще один пример блока генерации целевой скорости транспортного средства не содержит блока вычисления виртуального расстояния, а использует расчетный элемент, отличный от виртуального расстояния, и генерирует более низкую целевую скорость транспортного средства для препятствия, имеющего меньшее боковое отклонение, чем для препятствия, имеющего большее боковое отклонение.
[0108] В первом варианте осуществления способ и устройство для генерирования целевой скорости транспортного средства согласно настоящему раскрытию применяются в транспортном средстве автономного вождения, в котором управление рулением/приводом/торможением осуществляется автономно посредством выбора режима автономного вождения. Однако способ и устройство для генерирования целевой скорости транспортного средства согласно настоящему раскрытию также могут применяться в транспортных средствах, в которых целевая скорость транспортного средства используется для поддержки вождения водителем, таких как транспортное средство с содействием вождению, которое поддерживает вождение транспортного средства водителем путем отображения целевой скорости транспортного средства, или транспортное средство с содействием вождению, оснащенное только ACC.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением транспортного средства и устройство управления движением транспортного средства
Способ генерирования целевой скорости транспортного средства и устройство генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению

