Результат интеллектуальной деятельности: СПОСОБ ДОСТАВКИ НА ТОЧЕЧНУЮ ЦЕЛЬ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА
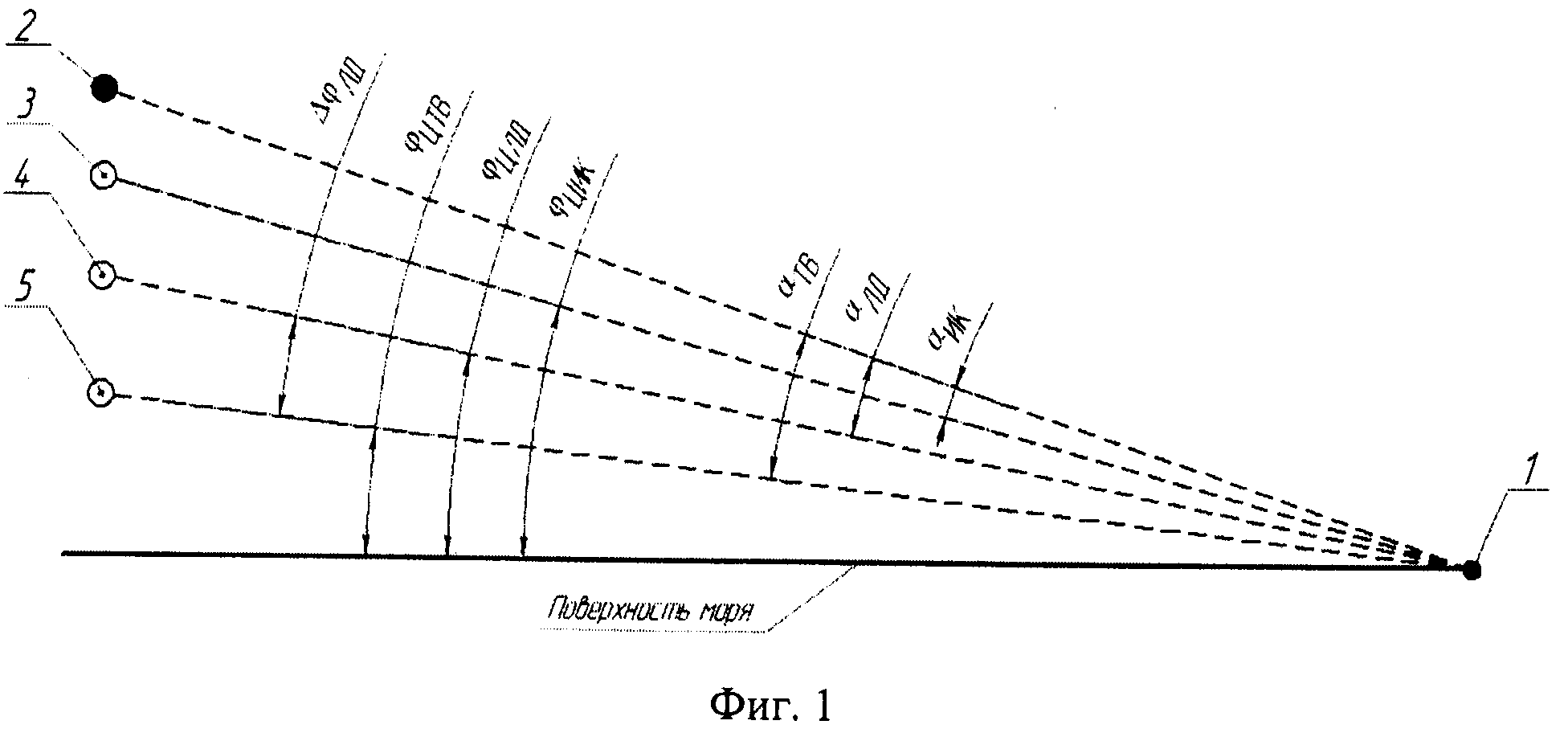
Вид РИД
Изобретение
Изобретение относится к области квантовой электроники и измерительной техники и предназначается для использования в корабельных активно-пассивных оптико-электронных системах (АП ОЭС), включающих телевизионные (ТВ), тепловизионные (ИК) каналы обнаружения и наведения, а также лазерные каналы измерения дистанции до цели (ЛД).
В ряде случаев объектами обнаружения, дистанцию до которых необходимо измерить, являются малоразмерные (точечные) цели, размер которых меньше размера лазерного пятна в момент измерения дистанции. Обнаружение цели производится с помощью ТВ или ИК канала, затем производится наведение на нее лазерного канала ЛД и измерение дистанции. Расходимость лазерного луча позволяет скомпенсировать погрешность непараллельности визирных осей ТВ, ИК и ЛД каналов, но не может полностью устранить влияние внешних помех, в первую очередь, рефракции оптических лучей в атмосфере. При сочетании некоторых гидрометеорологических условий отклонение визирных осей ТВ и ИК каналов может превышать угловую расходимость лазера дальномера, что делает невозможным попадание лазерного луча в точечную цель по данным ТВ и ИК каналов. Так как автомат сопровождения целей АП ОЭС удерживает строб сопровождения по изображению цели в ТВ или ИК канале, то попытки оператора переместить луч лазера в любую другую точку будут парированы системой автоматического сопровождения. Указанный недостаток существенно ограничивает применение современных АП ОЭС с жестким совмещением осей каналов.
Известны способы доставки излучения лазера на цель, заключающиеся в обнаружении цели пассивным оптическим каналом, определении ее угловых координат, совмещении диаграммы направленности лазерного излучения с линией визирования сигнала с направлением, определенным по пассивному каналу, и последующей посылке лазерного луча на цель [1-10].
В аналогах [2], [3] оптические оси каналов обнаружения и лазерного луча жестко соединены конструктивным образом, а наведение на цель и ее сопровождение осуществляется с помощью следящей, как правило, гиростабилизированной платформы, на которой размещены пассивные каналы обнаружения и канал лазерного дальномера. Описанные в [2], [3] способы и устройства носят общий характер и не предусматривают адаптацию к внешним условиям, влияющим на погрешности наведения лазерного луча, по данным, полученным в других спектральных диапазонах, нежели рабочая длина волны лазера.
В [4], [5] заявленные способы и устройства, их реализующие, имеют целью повышение точности попадания лазерного луча на движущуюся цель и основаны на одновременном детектировании на одном фотоприемнике трех сигналов - опорного, диагностического и пеленгационного, с помощью чего увеличивается точность определения упрежденной точки, в которую нацеливается лазерный луч. В этих аналогах распространение оптического излучения происходит, в основном, в космическом пространстве и не испытывает искажающего воздействия среды распространения, в частности, не испытывает рефракционного искажения траекторий лучей.
В способе [6] для сокращения времени измерения и повышения достоверности определения дальности до выбранной цели при наличии мешающих объектов при одном излучении лазера определяются дальности до каждой из нескольких целей в поле зрения дальномера, а данные поочередно выводятся на многоразрядный цифровой индикатор с присвоением соответствующего индекса. Этот способ также не учитывает искажающее воздействие атмосферной трассы, в частности, влияние рефракции, из-за которого одна и та же точечная цель будет иметь разные угловые координаты и восприниматься как два разных объекта при ее одновременном обнаружении в телевизионном и тепловизионном каналах.
В работе [7] для повышения дальности действия и повышения помехозащищенности лазерного дальномера в оптическую схему лазерного излучателя вводится перемещающийся элемент, с помощью которого компенсируются технологический разброс параметров деталей и неточности сборки устройства, приводящие к несовпадению оптических осей выходных пучков, что уменьшает концентрацию энергии зондирующего излучения на малоразмерных целях с соответствующим снижением дальности действия. При этом остается без учета влияние среды распространения оптических лучей, в том числе их рефракция.
В [8], [9] для определения дальностей до движущихся объектов, их угловых координат и скоростей движения используются расчеты, включающие значения скорости света в среде распространения. Эти способы также имеют ограниченное применение в земной атмосфере, поскольку в них не учитывается температурная зависимость показателя преломления воздуха, то есть способы, описанные в [8], [9] не позволяют адаптироваться к текущим условиям работы.
В работах [9], [10] способы основаны на посылке на цель серий лазерных импульсов, приеме отраженных сигналов с последующим вычислением дальности до цели. Однако в этих способах не учитывается ситуация, при которой возникают погрешности целеуказания лазерному дальномеру от пассивных каналов из-за разной рефракции видимых и ИК лучей в атмосфере, которая не позволит доставить излучение лазера на нужный малоразмерный объект.
Наиболее близким к предлагаемому способу является способ, описанный в [1], выбранный в качестве прототипа. В прототипе перед посылкой лазерного луча на цель производится корректировка направления лазерного луча, призванная компенсировать рассогласование осей пассивных и передающего лазерного каналов, возникающее из-за температурных и механических воздействий на конструктивные элементы оптико-электронной системы и ее носителя. Способ включает формирование изображения цели, регистрацию изображения цели, усиление, обращение волнового фронта и формирование мощного сигнала на цель. При этом изображение цели регистрируют в виде изменения локальных параметров среды. Затем в плоскости изображения цели для формирования задающей волны совмещают центр кривизны сферической задающей волны с точкой изображения цели путем лазерной генерации. После этого и перед формированием мощного сигнала на цель проводят обращение волнового фронта задающей волны четное число раз при ее одновременном усилении. Принципиальной физической особенностью предлагаемого в [1] способа является необходимость регистрации изображения цели на той же самой длине волны, на которой в дальнейшем производится формирование мощного сигнала на цель.
Основным недостатком прототипа является учет только ошибок наведения лазерного излучения на цель, возникающих вследствие факторов, связанных с воздействием на конструкцию оптического тракта температурных и механических возмущений. Не принимаются во внимание физическое явление расхождения траекторий распространения лазерного луча и лучей пассивных каналов обнаружения, работающих в разных спектральных диапазонах, из-за влияния атмосферной рефракции. При работе в протяженном слое атмосферы из-за спектральной зависимости рефракции воздуха ошибки наведения лазерного луча на цель, осуществляемого с помощью телевизионных или тепловизионных каналов, могут быть существенно больше других ошибок и приводить к промахам при лазерном лоцировании точечной цели. Поскольку рефракция на горизонтальных приземных трассах зависит от разности температур воздуха и подстилающей поверхности, то нет возможности заранее ввести упреждающие поправки в целеуказания, то есть учет влияния динамической окружающей среды на работу оптико-электронного комплекса должен основываться на измеренных ее параметрах и должен носить адаптивный характер.
Технической задачей, на решение которой направлено изобретение, является разработка способа компенсации погрешности данных целеуказания АП ОЭС, обусловленной внешними помехами, в первую очередь, оптической рефракцией, позволяющего обеспечить наведение лазерного луча на точечную цель.
Технический результат предполагаемого изобретения заключается в компенсации влияния оптической рефракции при наведение лазерного канала активно-пассивной оптико-электронной системы на точечную цель.
Указанный технический результат достигается тем, что осуществляют адаптивную корректировку данных целеуказания лазерному каналу, для чего рассчитывают спектральный показатель преломления воздуха в приводном слое атмосферы на центральной рабочей длине волны телевизионного канала по формуле:

где λтв - центральная рабочая длина волны телевизионного канала.
Одновременно рассчитывают спектральный показатель преломления воздуха на центральной рабочей длине волны тепловизионного канала по формуле:

где λик - центральная рабочая длина волны тепловизионного канала.
Также рассчитывают спектральный показатель преломления воздуха на центральной рабочей длине волны лазерного канала по формуле:

где λлд - центральная рабочая длина волны лазерного канала.
Затем измеряют текущие значения температур воздуха в приводном слое атмосферы ТВ и воды на поверхности моря ТМ, вычисляют их разность ΔТВМ=ТВ-ТМ, далее измеряют угловую координату цели ϕЦТВ в вертикальной плоскости с помощью телевизионного канала и угловую координату цели в вертикальной плоскости ϕЦИК с помощью тепловизионного канала, находят их разность ΔϕЦТВ-ЦИК=ϕЦТВ-ϕЦИК, а затем определяют значение угла нацеливания лазерного луча в вертикальной плоскости по формуле:

причем знак «-» ставят перед ΔϕЦТВ-ЦИК при разности между измеренными значениями температур воздуха в приводном слое атмосферы и воды на поверхности моря при ΔТВМ>0, а знак «+» перед ΔϕЦТВ-ЦИК при разности между измеренными значениями температур воздуха в приводном слое атмосферы и воды на поверхности моря при ΔТВМ<0, в дальнейшем смещают лазерный луч на вычисленный угол ϕЦЛД в вертикальной плоскости вверх при положительном значении угла ϕЦЛД и соответственно, в вертикальной плоскости вниз при отрицательном значении угла ϕЦДД, а затем осуществляют посылку лазерного луча на цель.
Сущность способа доставки на точечную цель излучения лазерного дальномера заключается в том, что после обнаружения точечной цели и предварительного наведения на нее луча ЛД по данным ИК или ТВ канала, производится дополнительное смещение луча ЛД на величину Δϕ в вертикальной плоскости.
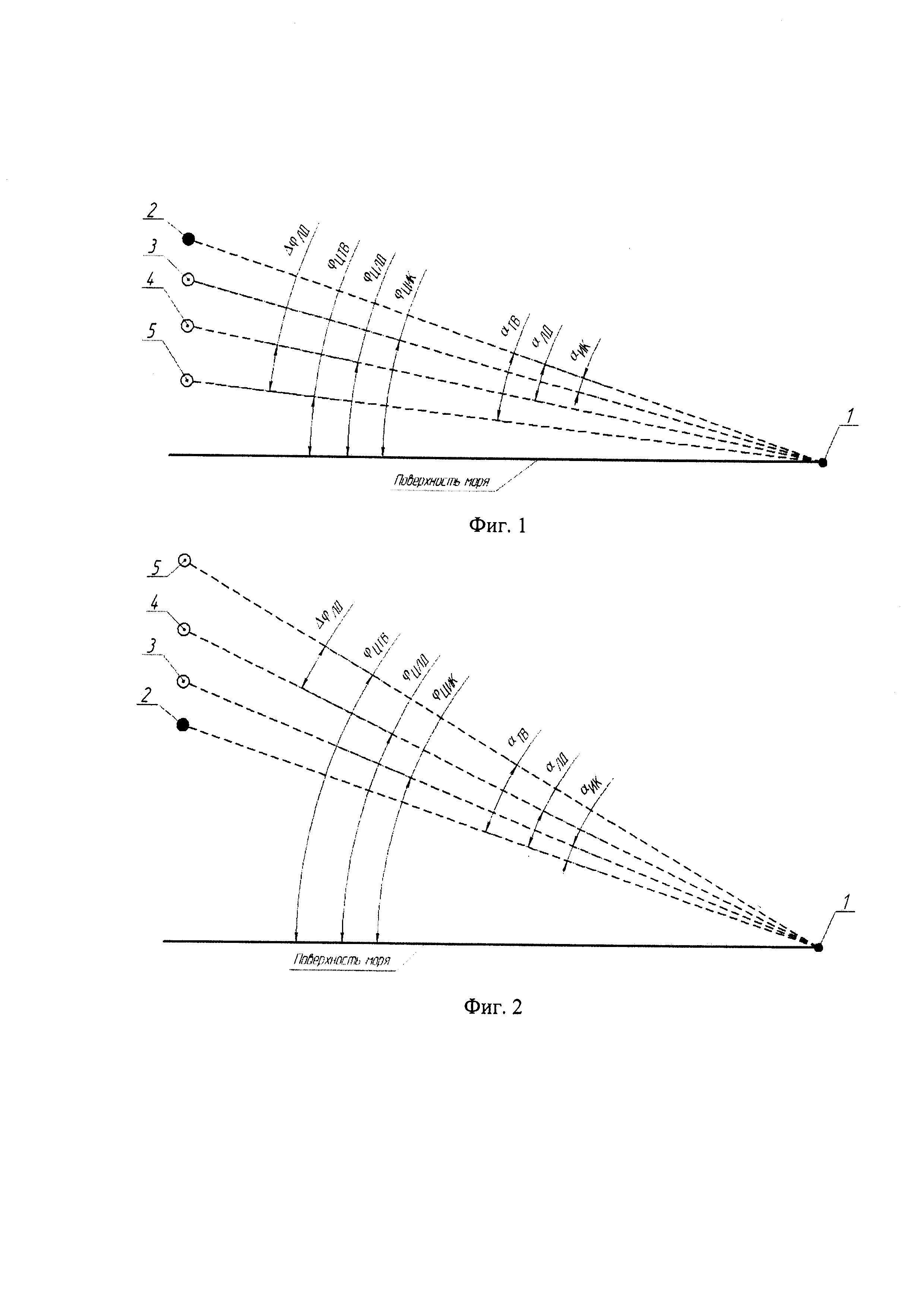
Предлагаемый способ поясняется чертежами фиг. 1, фиг. 2.
Фиг. 1 - положение визирных осей каналов АП ОЭС при ΔТВМ<0 (ΔТВМ=ТВ-ТМ), где позиция 1 соответствует положению АП ОЭС, позиция 2 - положению цели, позиции 3, 4, 5 - положению визирных осей ИК, ЛД и ТВ каналов соответственно; ТВ - измеренное текущее значение температуры воздуха в приводном слое атмосферы, ТМ - измеренное текущее значение температуры воды на поверхности моря.
Фиг. 2 - положение визирных осей каналов АП ОЭС при ΔТВМ>0 (ΔТВМ=ТВ-ТМ), где позиция 1 соответствует положению АП ОЭС, позиция 2 - положению цели, позиции 3, 4, 5 - положению визирных осей ИК, ЛД и ТВ каналов соответственно; ТВ - измеренное текущее значение температуры воздуха в приводном слое атмосферы, ТМ - измеренное текущее значение температуры воды на поверхности моря.
Обратимся непосредственно к обоснованию предлагаемого изобретения.
В условиях морской атмосферы зависимость показателя преломления от длины волны рассчитывается по формуле, приведенной в [11]:
n=1+0.05792105 (238.0185 - λ-2)-1+0.00167917 (57.362 - λ-2)-1.
Расчетные значения показателя преломления воздуха для температуры Тв=287К приведены в таблице 1.

Количественной характеристикой углового отклонения «кажущегося» направления на цель относительно истинного выбран угол полной рефракции α - угол между касательной к направлениям лучей в начальной и конечной точках их траектории, знак и значение которого определяются градиентом n(λ) и который, в первом приближении, возможно предсказать по текущему соотношению температур воздуха в приводном слое атмосферы ТB и воды на поверхности моря ТM [12]
ΔТВМ=ТB-ТM

В первом приближении угол рефракции линейно зависит от разности температур ΔТВМ

Формула (1) позволяет оценить зависимость углового отклонения Δϕ лучей в ТВ и ИК каналах от луча ЛД при визировании объекта, находящегося на расстоянии  Лучи лазера, ИК и видимого каналов будут лежать в одной вертикальной плоскости, при этом лучи ЛД будут находиться между лучами видимого и ИК диапазонов. Знак разности ΔТВМ будет определять, лучи какого диапазона (ИК или видимого) будут находиться ближе к поверхности моря - при распространении оптического излучения траектория лучей будет изгибаться в ту сторону, где больше плотность воздуха, то есть где он холоднее.
Лучи лазера, ИК и видимого каналов будут лежать в одной вертикальной плоскости, при этом лучи ЛД будут находиться между лучами видимого и ИК диапазонов. Знак разности ΔТВМ будет определять, лучи какого диапазона (ИК или видимого) будут находиться ближе к поверхности моря - при распространении оптического излучения траектория лучей будет изгибаться в ту сторону, где больше плотность воздуха, то есть где он холоднее.
Знак отклонения лазерного луча от направления визирования, задаваемого ТВ каналом, определяется по знаку ΔТВМ. Если ΔТВМ>0, то лазерный луч нужно отклонять в сторону поверхности моря на угол ΔϕЛД. Для ΔТВМ<0, наоборот, лазерный луч надо отклонять на угол ΔϕЛД в сторону небосвода.
На основании измеренных значений ΔТВМ определяются разности углов рефракции лучей ЛД и ТВ каналов и ЛД и ИК каналов, исходя из формулы (1):


где αтв, αик и αлд - углы рефракции лучей для ТВ, ИК и ЛД каналов, nтв, nик и nлд - показатели преломления воздуха для центральных длин волн ТВ, ИК и ЛД каналов.
Разность углов рефракции лучей в ТВ и ИК каналах равна:

Δαтв-ик=Δαлд-тв-Δαлд-ик,
Разность угловых координат цели в вертикальной плоскости, измеряемых с помощью ТВ и ИК каналов, равна разности углов рефракции в них:

Угол отклонения лазерного луча от оси визирования цели ТВ каналом в вертикальной плоскости равен разности углов рефракции для ТВ и ЛД каналов:

Из выражений (4) и (5) следует, что  подставляя полученное отношение в (6), получаем выражение:
подставляя полученное отношение в (6), получаем выражение:

Угол нацеливания луча ЛД канала в вертикальной плоскости тогда будет определяться выражением:

где знак «-» выбирают при разности температур воздуха в приводном слое атмосферы и воды на поверхности моря ΔТВМ>0, а знак «+» при ΔТВМ<0.
Пропорция П из-за рефракции разделяет изображение точечной цели в ТВ, ИК и ЛД каналах, зависит только от оптических постоянных воздуха.

В широком диапазоне условий наблюдения эта пропорция может приниматься постоянной и вычисляться заранее для рабочих длин волн каналов конкретной АП ОЭС.
Пример такого расчета приведен в таблице 2.

Предложенный способ реализуется следующим образом. Рассчитывают спектральный показатель преломления воздуха на центральной рабочей длине волны телевизионного канала по формуле:

где λтв - центральная рабочая длина волны телевизионного канала.
Одновременно рассчитывают спектральный показатель преломления воздуха на центральной рабочей длине волны тепловизионного канала по формуле:

где λик - центральная рабочая длина волны тепловизионного канала.
Затем рассчитывают спектральный показатель преломления воздуха на центральной рабочей длине волны лазерного канала по формуле:

где λлд - центральная рабочая длина волны лазерного канала, далее измеряют текущие значения температур воздуха в приводном слое атмосферы ТВ и воды на поверхности моря ТМ, вычисляют разность между измеренными температурами воздуха в приводном слое атмосферы и воды на поверхности моря по формуле: ΔТВМ=ТВ-ТМ.
Затем измеряют угловую координату цели ϕЦТВ в вертикальной плоскости с помощью телевизионного канала и угловую координату цели в вертикальной плоскости ϕЦИК с помощью тепловизионного канала.
Потом вычисляют их разность ΔϕЦТВ-ЦИК=ϕЦТВ-ϕЦИК, затем определяют значение угла нацеливания лазерного луча в вертикальной плоскости по формуле:

причем знак «-» ставят перед ΔϕЦТВ-ЦИК при разности между измеренными значениями температур воздуха в приводном слое атмосферы и воды на поверхности моря при ΔТВМ>0, а знак «+» перед ΔϕЦТВ-ЦИК при разности между измеренными значениями температур воздуха в приводном слое атмосферы и воды на поверхности моря при ΔТВМ<0.
Предлагаемый способ компенсации погрешности целеуказания основан на однозначной связи углов рефракции оптических лучей с соотношением температур воды на поверхности моря и воздуха в приводном слое атмосферы.
При этом положительный результат предлагаемого технического решения достигается за счет исключения промахов при наведении ЛД на точечную цель в результате определения положения конечной точки траектории лазерного луча по измерениям угловой координаты точечной цели в телевизионном ϕЦТВ и тепловизионном ϕЦИК каналах.
Таким образом, заявленный способ доставки на точечную цель излучения лазерного дальномера обеспечивает компенсацию влияния оптической рефракции при наведение лазерного канала активно-пассивной оптико-электронной системы на точечную цель. Источники информации.
1. Способ доставки на цель лазерного излучения: пат.1839888, Рос. Федерация: МПК8 G01C 3/00, G01C3, G01B, G03B; патентообладатель Государственное предприятие "Всероссийский научный центр "Государственный оптический институт имени С.И. Вавилова" (RU), - №3180164/28; заявл. 14.09.1987; опубл. 20.06.2006 Бюл. №17, 2006.
2. Малашин М.С., Калинский Р.П., Борисов Ю.Б. "Основы проектирования лазерных локационных систем". М.: Высшая школа. 1983. С. 162-166.
3. Петковский В.И., Пожидаев О.А. "Локаторы на лазерах". М: Воениздат.1969.
4. Способ доставки лазерного излучения на объект и устройство для его осуществления: пат.2270523, Рос. Федерация: МПК8 Н04В 10/10, G01S 17/00; патентообладатель Государственное унитарное предприятие "НПО Астрофизика" (RU), - №2004121652/09; заявл. 14.07.2004; опубл. 20.02.2006 Бюл. №5, 2006.
5. Способ наведения лазерного излучения: пат.2343412, Рос. Федерация: МПК8 G01C 3/08, G01S 3/08; патентообладатель Федеральное государственное унитарное предприятие "Научно-исследовательский институт прецизионного приборостроения" (RU), - №2007115915/2; заявл. 27.04.2007; опубл. 10.01.2009 Бюл. №1, 2009.
6. Способ измерения дальности: пат. 2422770, Рос. Федерация: МПК8 G01C 3/08; патентообладатель Вильнер Валерий Григорьевич (RU), Вильнер Антон Валерьевич (RU), Волобуев Владимир Георгиевич (RU) и др., - №2010114668/28; заявл. 14.04.2010; опубл. 27.06.2011 Бюл. №18, 2011.
7. Лазерный дальномер: пат. 2620765, Рос. Федерация: МПК8 G01C 3/08; патентообладатель Открытое акционерное общество "Научно-исследовательский институт "Полюс" имени М.Ф. Стельмаха" (RU), - №2016104736; заявл. 12.02.2016; опубл. 29.05.2017 Бюл. №16, 2017.
8. Способ обнаружения объектов, измерения скорости, дальности и угловых координат и устройство для его осуществления: пат. 2521203 Рос. Федерация: МПК8 G01С 3/08; патентообладатель Бардин А.В. (RU), Филонов О.М. (RU), Меткин Н.П. (RU), Озеров В.П. (RU), - №2012157907/28; заявл. 27.12.2012; опубл. 27.06.2014 Бюл. №18, 2014.
9. Способ определения дальности и/или скорости удаленного объекта: пат.2385471, Рос. Федерация: МПК8 G01S 17/50, G01C 3/08; патентообладатель Федеральное государственное унитарное предприятие "Научно-исследовательский институт "Полюс" имени М.Ф. Стельмаха" (RU), - №2008116164/28, заявл. 25.04.2008; опубл. 27.03.2010 Бюл. №9, 2010.
10. Способ лазерного дальнометрирования: пат. 2538432 Рос. Федерация: МПК8 G01C 3/08; патентообладатель Открытое акционерное общество "Научно-производственное корпорация "Системы прецизионного приборостроения" (ОАО "НПК "СПП") (RU), - №2013131191/28; заявл. 09.07.2013; опубл. 10.01.2015 Бюл. №1, 2015.
11. G.J. Kunz, А. М. J. van Eijk, D. Tsintikidis, and S. M. Hammel, "Effects of atmospheric refraction and turbulence on long-range IR imaging in the marine surface layer: Comparisons between experiment and simulation,"Proc. SPIE5891, 58910A (2005).
12. Тарасов В.В., Якушенков Ю.Г. Введение в проектирование оптико-электронных приборов: системный подход. Москва. Университетская книга. 2016. С. 486.



Комбинированный трубчатый нагреватель
Способ измерения мощности гидроакустического излучателя и устройство для его осуществления
Способ очистки околоземного космического пространства от мелких частиц космического мусора
Способ калибровки радиолокационной станции по величине эффективной поверхности рассеяния при проведении динамических измерений эффективной поверхности рассеяния исследуемых объектов
Способ калибровки радиолокационной станции, работающей на волнах круговой поляризации при параллельном приеме отраженных сигналов, по величине эффективной поверхности рассеяния при динамических измерениях эффективной поверхности рассеяния баллистических и космических объектов
Устройство для получения семян шишек хвойных культур и их предпосевной обработки
Станция помех
Устройство для свч предпосевной и послеуборочной обработки семян
Устройство для разъемного соединения швартовного турельного узла судна
Космический аппарат для калибровки радиолокационной станции по величине эффективной поверхности рассеяния
Конусная дробилка
Дифракционный способ измерения угловых перемещений и устройство для его осуществления
Способ калибровки радиолокационной станции с использованием космического аппарата с эталонными отражательными характеристиками

