Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ ПРИ СГЛАЖИВАНИИ В ДЕКАРТОВЫХ КООРДИНАТАХ С УЧЕТОМ ИЗМЕРЕНИЙ РАДИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ
Вид РИД
Изобретение
Изобретение относится к радиоэлектронике и касается принципов построения системы обработки гидроакустической или радиолокационной информации в части автоматического сопровождения подвижной цели.
Только автоматическое многоцелевое сопровождение в условиях воздействия интенсивного нестационарного шума позволяет справиться с возросшим потоком информации, однако, надежность автоматического сопровождения по-прежнему остается невысокой, что ограничивает возможности его применения в реальных условиях.
Известный способ автоматического сопровождения [1, 2] предполагает излучение и прием зондирующих сигналов от отражающих объектов, после чего принимают решение об обнаружении отметки цели (истинной или ложной), которой соответствуют некоторые измеренные значения полярных координат: дальности Di и пеленга Pi. Каждую обнаруженную в текущем i-ом цикле обработки (локации) отметку проверяют на ее принадлежность уже сопровождаемым траекториям по отклонению координат отметки от предполагаемых (экстраполируемых) значений. Согласно [1, 2], в качестве сопровождаемой отбирают отметку, попадающую в строб сопровождения, ближайшую по положению к экстраполируемому значению. Недостатком такого способа отбора является его низкая помехозащищенность. Более помехозащищенным является бесстробовый способ сопровождения [3
Координаты отобранной для каждой сопровождаемой цели отметки долее подвергают оценке (сглаживанию) с использованием фильтра сглаживания. С этой целью часто используют линейный фильтр Калмана, как наиболее точный и простой в реализации [1, 2].
В современных системах обработки информации сглаживание координат сопровождаемой цели, как правило, выполняют в декартовой системе координат. Основным преимуществом такой обработки является линейный характер изменения во времени сглаживаемых координат цели при постоянстве курсов, а также скоростей цели и носителя системы обработки, что теоретически позволяет повысить точность сопровождения при использовании линейного фильтра Калмана [2, стр. 207-217].
Декартовы координаты обнаруженной отметки (Xi, Yi) получают пересчетом измеренных значений полярных координат - дальности и пеленга (Di, Pi):

В этом случае нарушается закон о нормальности и независимости оцениваемых декартовых координат, что не соответствует принятым допущениям при выборе весовых коэффициентов линейного фильтра Калмана. Влияние таких искажений приводит к росту ошибок сопровождения.
Существенным недостатком линейного фильтра Калмана является его инерционность, что обуславливает низкую точность сопровождения на начальном участке траектории, т.е. при малом числе контактов с целью (n<10). Ошибки сглаживания в этом случае могут на 20% и более превышать измерительные ошибки, а ошибки экстраполяции - в 2 и более раз.
Известно [1, 2], что учет при сглаживании координаты сопровождаемой цели результатов независимых измерений скорости изменения этой координаты, например, радиальной составляющей скорости, теоретически позволяет снизить ошибки сопровождения особенно при ограниченном числе контактов с целью [2, стр. 248, прототип]. Однако на практике данный способ не находит широкого применения ввиду его низкой надежности.
Так величину радиальной составляющей скорости Vpi (далее по тексту радиальной скорости) можно получить, используя доплеровский сдвиг частоты принимаемого гидроакустического эхо-сигнала dƒi, согласно выражению [3]:

где Сзв = 1500 м/сек - скорость звука в воде;
ƒо - рабочая частота (кГц).
Наличие измерений радиальной скорости при обнаружении уже первой отметки может быть использовано для снижения ошибок оценки координат при малом числе контактов с целью. Отсутствие таких данных обуславливает необходимость обнаружения ни менее двух отметок цели для вычисления скорости движения цели в грубом ее приближении [1].
Декартовы составляющие полученных измерений радиальной скорости Vxi и Vyi равны:

где Kci - курсовой угол цели.
Основным недостатком такого способа автоматического сопровождения является его низкая надежность, что обусловлено нелинейной зависимостью декартовых составляющих радиальной скорости от курсового угла движения цели.
Целью настоящего изобретения является снижение ошибок и повышение надежности автоматического сопровождения высокоскоростной цели при ограниченном числе контактов с целью.
Согласно предлагаемому способу при расчете коэффициентов фильтра Калмана учитывают изменчивость от цикла к циклу обработки дисперсий как декартовых координат (σXi2, σYi2), так и декартовых составляющих радиальной скорости (σVxi2, σVyi2), рассчитываемых согласно выражениям:


где σD - СКО (измерительная ошибка) по дальности;
σР - СКО (измерительная ошибка) по пеленгу;
σVp - СКО (измерительная ошибка) по радиальной составляющей скорости цели;
σKci - СКО (измерительная ошибка) по курсовому углу.
Из выражений (4) следует, что при переходе к сглаживанию в декартовых координатах дисперсии последних зависят как от дальности, так и от пеленга обнаруженных отметок цели и их дисперсий. При этом дисперсии декартовых составляющих радиальной скорости (σVxi2, σVyi2) определяются радиальной скоростью и курсом сопровождаемой цели, а также их дисперсиями. В итоге характер изменения во времени декартовых координат и их скоростей даже при указанных выше ограничениях становится нелинейным, чем можно объяснить рост ошибок и снижение надежности автоматического сопровождения известным способом.
Курс цели может быть получен по результатам измерения декартовых координат обнаруженных отметок цели согласно выражению:

Поскольку точность оценки курса невелика, предлагаем сглаживать рассчитанный курс. Наиболее простым способом сглаживания курса является его межцикловая весовая обработка (сглаживание):

где α - заданный коэффициент.
Как показали результаты выполненных исследований, σKci может достигать существенной величины и изменяется на всем интервале наблюдений. Допустимо положить σKci ≈ 0.2 Kci и α=0.3.
В качестве исходного (i=1) сглаженного значения курса берется его измеренное значение.
Алгоритмы расчета сглаженных значений декартовых координат Xsi и Ysi и скоростей их изменения Vxsi и Vysi имеют вид [1]:


При этом экстраполируемые декартовы координаты (Xei, Yei) и скорости их изменения (Vxei, Vyei) определяют согласно выбранной линейной модели движения цели:


Коэффициенты фильтра сглаживания предлагаем рассчитывать рекуррентно согласно следующим выражениям [6]:
где


Исходные значения коэффициентов фильтра сглаживания для второго цикла обработки в случае обнаружения второй отметки цели (i=2) полагаем равными [1]:
где 
Таким образом, новизна предлагаемого способа автоматического сопровождения подвижной цели состоит в следующем:
- Сглаживание координат подвижной цели выполняют в декартовой системе координат, определяемых через измеряемые полярные координаты, с учетом декартовых составляющих радиальной скорости цели. При этом на каждом цикле обработки, начиная с момента обнаружения второй отметки цели, сглаженные декартовы координаты подвижной цели (Xsi, Ysi) получают как линейную комбинацию экстраполируемых на текущий цикл обзора декартовых координат - (Xei, Yei), взвешенных значений рассогласования экстраполируемых декартовых координат с их измеренными значениями (Xi, Yi) и взвешенных значений рассогласования экстраполируемых декартовых составляющих радиальной скорости цели (Vxei, Vyei) с их измеренными значениями (Vxi, Vyi) согласно выражениям (8, 9), при этом весовые коэффициенты фильтра сглаживания вычисляют рекуррентно согласно выражениям (12-15), а исходные значения - согласно выражениям (16, 17).
- На каждом цикле обработки определяют курс цели Kci согласно выражению (6) и его сглаженное значение Kcsi, как взвешенную линейную комбинацию измеренного текущего курса Kci и его сглаженного на предыдущем цикле обработки значения Kcsi-1 согласно выражению (7).
- На каждом цикле обработки рассчитывают СКО (ошибки измерения) декартовых координат (σXi, σYi), как взвешенную линейную комбинацию измеряемых полярных координат (Di, Pi) и ошибок их измерения (σD и σР) согласно выражениям (4).
- На каждом цикле обработки рассчитывают СКО (ошибки измерения) декартовых составляющих радиальной скорости (σVxi, σVyi), как взвешенную линейную комбинацию измеряемой радиальной скорости Vp, курса цели Kci и ошибок их измерения (σVp и σKci) согласно выражениям (5).
Эффективность предложенного способа оценивалась по результатам статистического имитационного моделирования для М=100 реализаций после i циклов обработки (контактов с целью) с использованием имитационной модели системы автоматического сопровождения [7]. В качестве показателей эффективности рассмотрены нормированные к СКО полярных координат (σD, σР) СКО (ошибки) сглаживания σDsi, σPsi и экстраполяции σDei, σPei по дальности и пеленгу, рассчитанные согласно выражениям [8]:


где j=1, …, М - номер испытания, М=100 - общее число испытаний;
i - цикл обработки;
Dsji, Psji - сглаженные, Deji, Peji - экстраполируемые и Dистi, Ристi - истинные значения дальности и пеленга при j испытании для i цикла обработки.
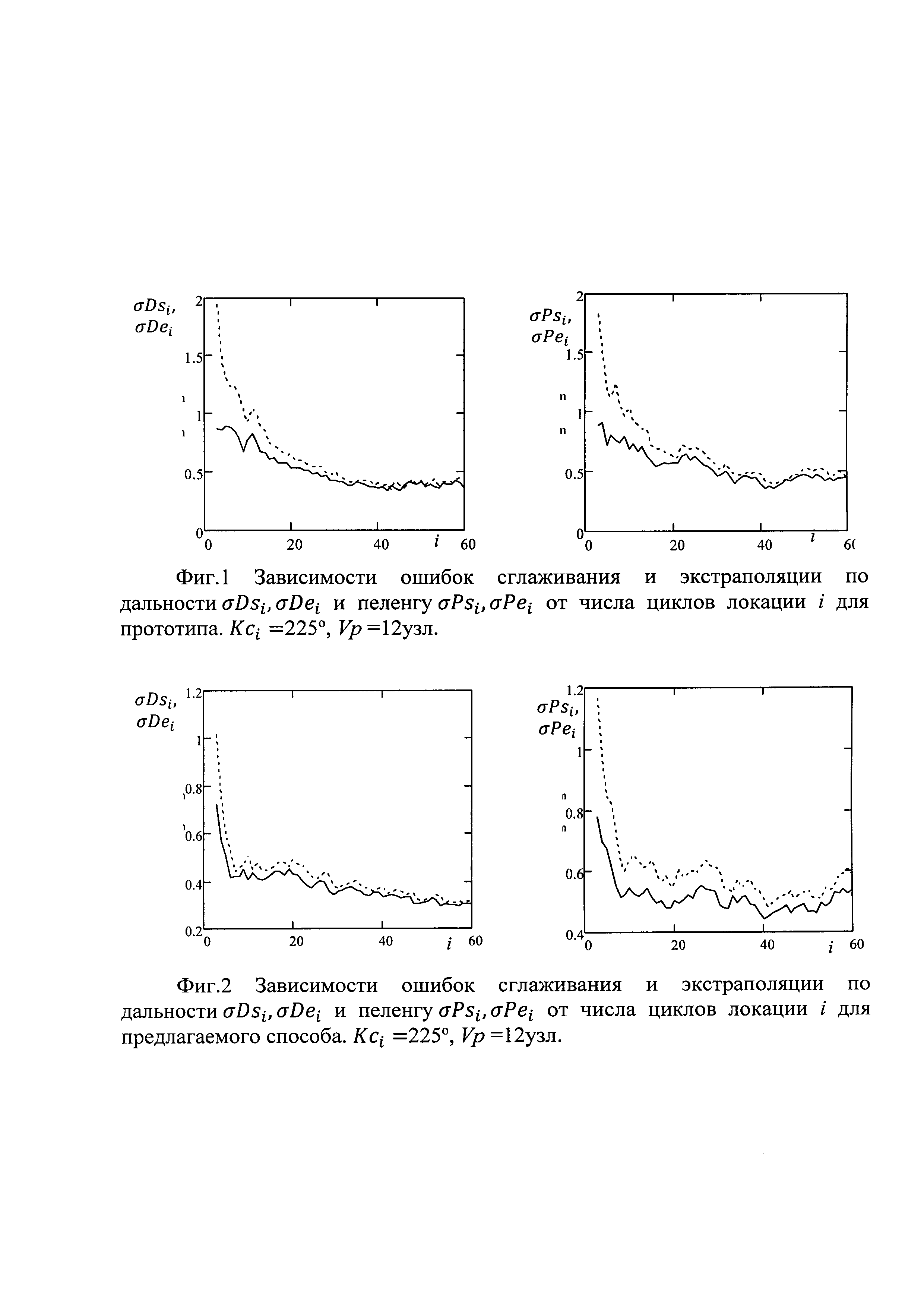
При расчетах полагали вероятности обнаружения траектории цели 0.9 и ложной траектории - 10-6. Носитель ГАС оставался неподвижен, пеленг цели 45°, дальность первичного обнаружения цели - 20 км. Цель двигалась прямолинейно со скоростью 12узл и курсом Kc=225° ("на нас"), σD=1%Dm и σР=1°.
На фиг. 1 и 2 представлены зависимости ошибок сглаживания σDsi, σPsi и экстраполяции σDei, σPei от числа циклов локации i, полученные для прототипа при сопровождении в декартовых координатах, но без учета радиальной скорости (фиг. 1) и предлагаемого способа (фиг. 2) с учетом радиальной скорости. Сплошной линией построены зависимости, соответствующие ошибкам сглаживания, штрихпунктирной - ошибкам экстраполяции.
Как следует из представленных зависимостей, предлагаемый способ позволяет на 20-30% снизить ошибки сглаживания и на 30-40% ошибки экстраполяции на участке устойчивого сопровождения (i>10). Но, что особенно важно, выигрыш по точности сопровождения при ограниченном числе контактов с целью (i<10) может достигать 1.5-2 раз.
При увеличении скорости движения цели, например, до 30 узлов ошибки сопровождения для прототипа растут до 30-50%. При этом, как следует из результатов моделирования, представленных на фиг. 3 и 4, ошибки сглаживания и экстраполяции для предлагаемого способа оказываются в 2-3 раза ниже, чем для прототипа.
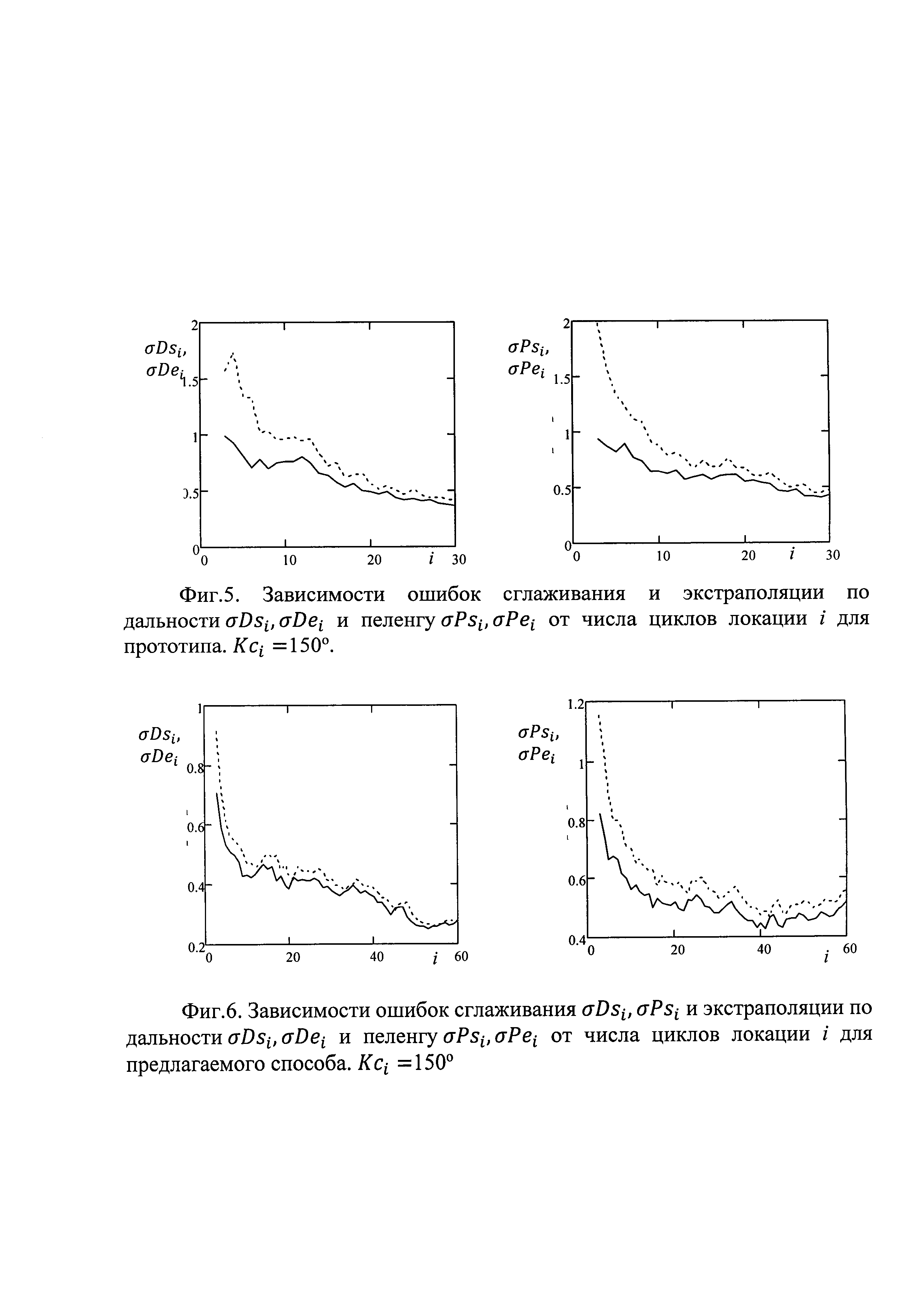
Изменение курса цели, как следует из результатов моделирования, представленных на фиг. 5, также ведет к существенному росту ошибок сопровождения для прототипа. Предлагаемый способ (фиг. 6) позволяет существенно снизить влияние курса цели на точность ее сопровождения.
Предлагаемый способ может быть применен в приемных трактах активных локаторов гидроакустических и радиолокационных комплексов и других информационных системах, в которых используют автоматическое сопровождение подвижных целей.
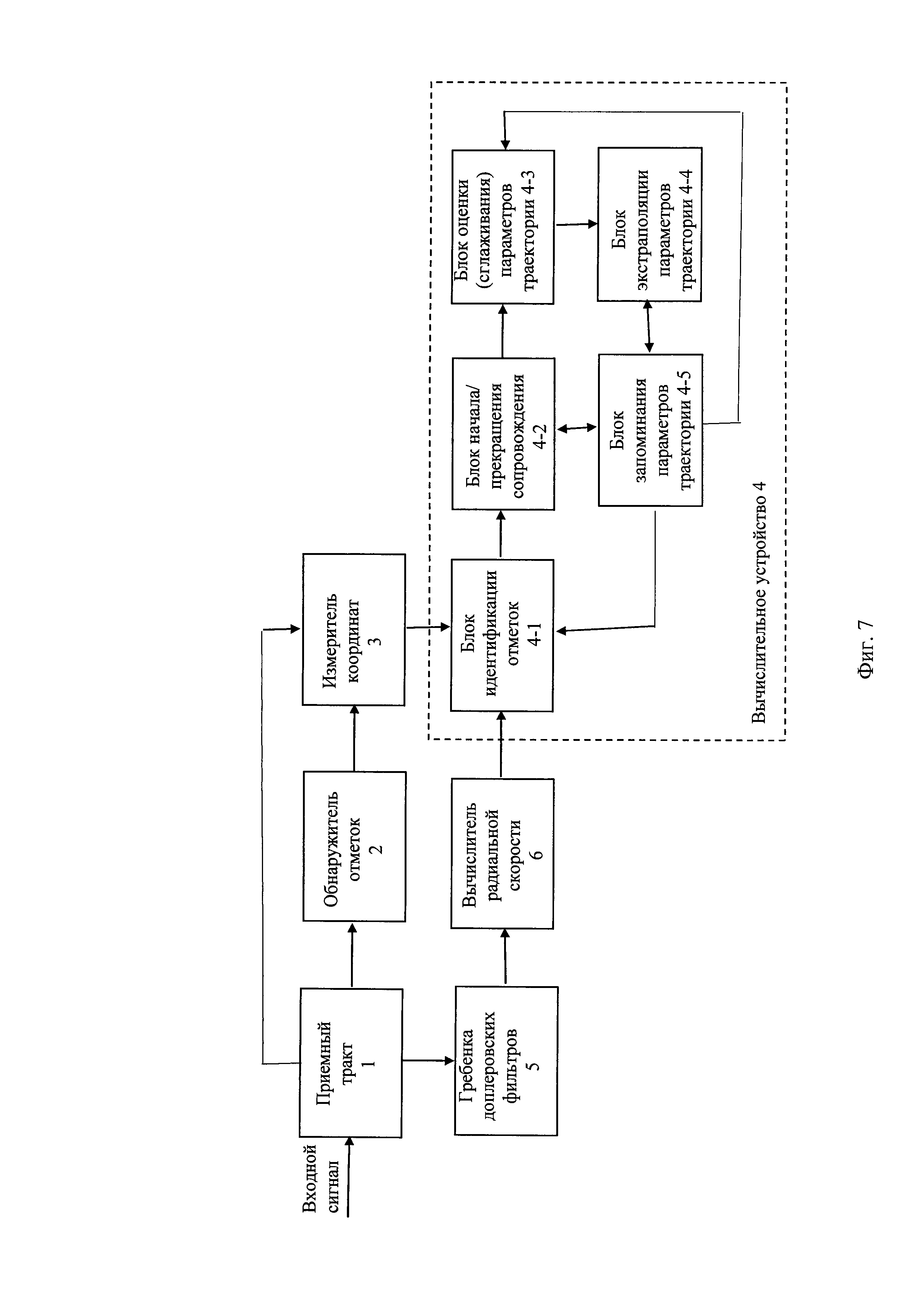
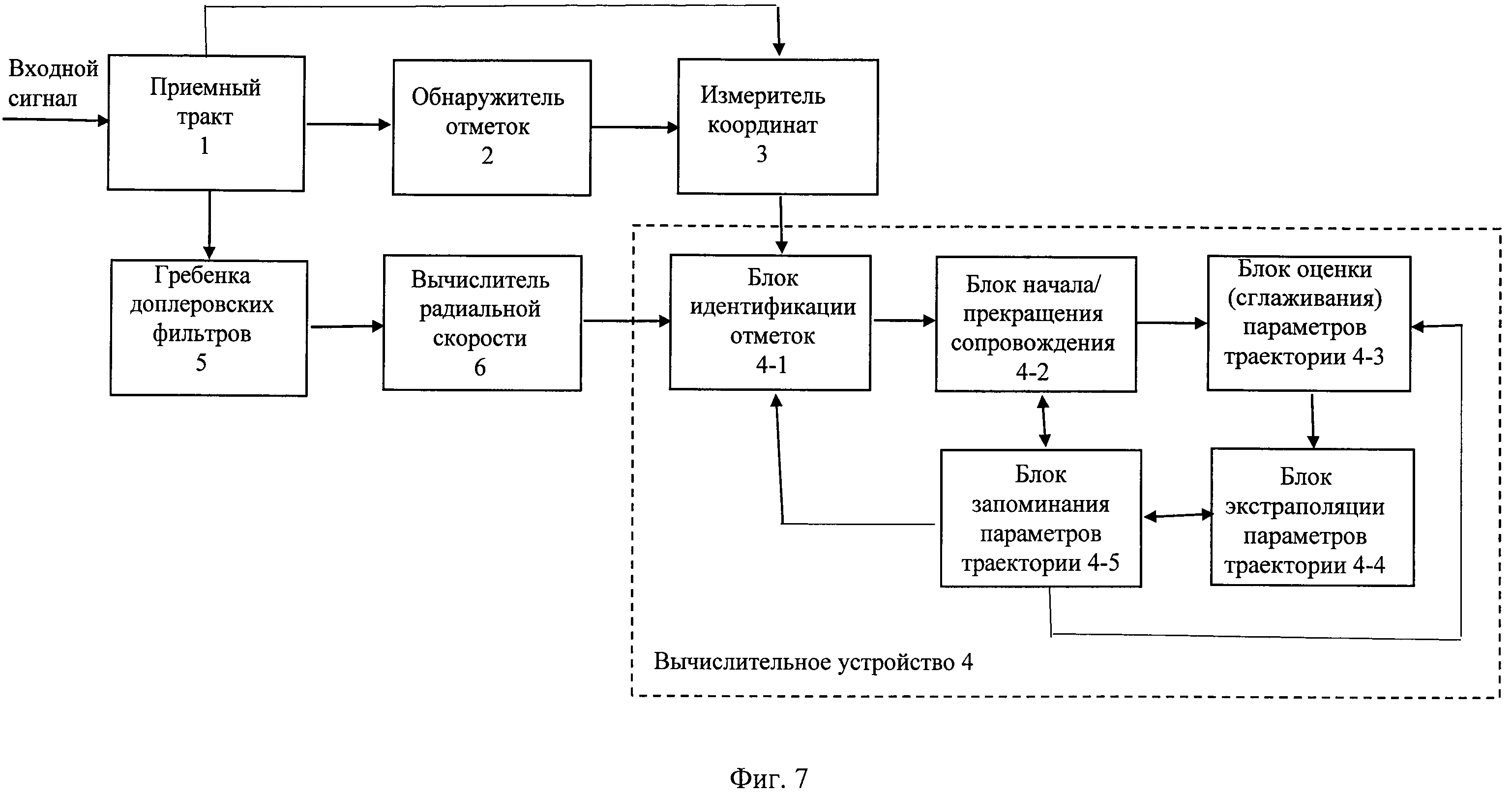
Изобретение реализуется программно-аппаратными средствами цифрового вычислительного комплекса системы обработки информации. В качестве примера реализации предлагаемого способа рассмотрена блок-схема устройства (фиг. 7), соответствующего системе обработки ГАС, работающей в активном режиме.
Устройство состоит из последовательно соединенных приемного тракта 1, обнаружителя отметок цели/ложных отметок 2, измерителя координат обнаруженных отметок 3 и вычислительного устройства 4, а также последовательно соединенных блока гребенки доплеровских фильтров 5 и вычислителя радиальной скорости 6. Приемный тракт 1 вторым выходом соединен с дополнительным входом измерителя координат 3, а третьим выходом через последовательно соединенные гребенку доплеровских фильтров 5 и вычислитель радиальной скорости 6 с дополнительным входом вычислительного устройства 4.
Вычислительное устройство 4 состоит из последовательно соединенных блока идентификации обнаруженных отметок 4-1, блока начала/прекращения сопровождения 4-2, блока оценки (сглаживания) параметров траектории 4-3, блока экстраполяции параметров траектории 4-4 и блока запоминания параметров траектории 4-5, своим первым выходом соединенного со вторым входом блока идентификации 4-1, вторым выходом - с дополнительным входом блока начала/прекращения сопровождения 4-2, третьим выходом - с соответствующим входом блока экстраполяции 4-4 и четвертым выходом - с соответствующим входом блока оценки 4-3. При этом блок начала\прекращения сопровождения 4-2 дополнительным выходом соединен с соответствующим входом блока запоминания 6-5.
Принимаемый антенной (входной) сигнал поступает на вход приемного тракта 1 и далее на обнаружитель 2, где его сравнивают с порогом обнаружения. В случае превышения сигналом порога поступает команда на измеритель координат 3, с выхода которого измеренные значения координат обнаруженной отметки поступают в вычислительное устройство 4.
В блоке идентификации 4-1 вычислительного устройства 4 обнаруженную отметку присоединяют к одной из сопровождаемых траекторий или идентифицируют как «первичную». Эти данные поступают в блок запоминания 4-5 и на первый вход блока оценки координат 4-3. В блоке 4-2 принимают решение о начале или прекращении сопровождения траекторий целей, отметки которых не были обнаружены в текущем цикле обработки.
В блоке 4-3 выполняют оценку (сглаживание) координат обнаруженной отметки согласно предлагаемому способу с учетом запомненных на предыдущем цикле обработки (экстраполируемых) данных. В блоке 4-4 в соответствии с выбранным алгоритмом определяют экстраполируемые на следующий цикл обработки значения координат, которые запоминают в блоке 4-5.
В блоках 5 и 6 определяют радиальную скорость цели, по номеру доплеровского канала, в котором обнаружен максимальный сигнал.
Источники информации
1. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974.
2. Кузьмин С.З. Цифровая радиолокация. Введение в теорию - Киев.: 2000.: Компьютерно-издательский информационный центр (KBIЦ), 2000. 428 с.
3. Светличная А.А., Яковлева З.В. Способ бесстробового автоматического сопровождения подвижной цели. Патент №2551356 C1 (RU), G01S 7/41, оп. 25.05.2015.
4. Светличная А.А. Оценка эффективности многоцелевого автоматического сопровождения при использовании алгоритма последовательного анализа. Труды XXX Всероссийского симпозиума «Радиолокационное исследование природных сред». Вып. 12. СПб, 2017.
5. Урик Р. Дж. Основы гидроакустики. Л.: Судостроение, 1978.
6. Светличная А.А. и др. «Способ автоматического сопровождения маневрирующей цели в режиме активной локации гидроакустического или радиолокационного комплекса». Патент RU №2260197 G0S 13/66, оп. 15.01.2003.
7. Светличная А.А. «Имитационная модель оценки эффективности системы автоматического сопровождения двух близкорасположенных гидроакустических целей, с учетом возможных пропусков отметок целей и наличия ложных отметок». Свидетельство о государственной регистрации программы для ЭВМ № RU 2017662146 от 30.10.2017.


Мягкий судоподъемный понтон
Реактивный дымовой прибор
Спасательный люк подводного технического средства
Двухкоординатный эхолот
Способ обнаружения замыкания между витками электрической машины, определения доли замкнутых витков и перенапряжения фаз
Способ определения аварийного снижения сопротивления изоляции судовой электрической сети и определения сопротивления неисправного участка изоляции
Способ освещения подводной обстановки
Подводный объект с транспортным модулем для внешней передачи людей и грузов
Способ применения взрывных источников звука
Устройство для крепления груза к грузоподъемному средству
Способ бесстробового автоматического сопровождения подвижной цели
Способ комбинированного сглаживания координат подвижной цели
Способ определения удельного поперечного сопротивления электроизолирующего покрытия в различных местах подводной части корпуса корабля, находящегося на плаву
Способ загоризонтного обнаружения цели

