Результат интеллектуальной деятельности: ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Данное изобретение относится к датчикам на основе электроактивных полимеров, а также к комбинированным приводам и датчикам.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Электроактивные полимеры (ЭАП) - развивающийся класс материалов в области электрочувствительных материалов. ЭАП могут работать в качестве датчиков или приводов и могут быть легко изготовлены с различными формами, обеспечивающими возможность легкого встраивания в самые разнообразные системы.
Были разработаны материалы с такими характеристиками, как напряжение и деформация актюации, которые были значительно улучшены за последние десять лет. Технологические риски были снижены до уровней, приемлемых для разработки продукта, вследствие чего ЭАП стали представлять возрастающий интерес с коммерческой и технической точки зрения. Преимущества ЭАП включают низкую потребляемую мощность, небольшой форм-фактор, гибкость, бесшумное функционирование, точность, возможность высокого разрешения, высокое быстродействие и циклическая актюация.
Улучшенные рабочие характеристики и конкретные преимущества материала ЭАП приводят к их применимости в новых прикладных задачах.
Устройство ЭАП может быть применено по любому назначению, при котором желательна небольшая величина перемещения компонента или элемента, на основании электропривода. Аналогично, данная технология может быть использована для восприятия небольших перемещений.
Использование ЭАП позволяет реализовать функции, которые не были возможны ранее, или дает большое преимущество перед обычными решениями датчика/привода, благодаря сочетанию относительно большой деформации и усилия в небольшом объеме или тонкого форм-фактора, по сравнению с обычными приводами. ЭАП также способствуют бесшумной работе, точному электронному управлению, быстрому отклику и большому диапазону возможных частот возбуждения, таких как 0-1 МГц, наиболее типично, менее 20 кГц.
Устройства с использованием электроактивных полимеров могут быть подразделены на устройства с полевыми и ионными материалами.
Примеры полевых ЭАП включают пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе ПВДФ) и диэлектрические эластомеры. Другие примеры включают электрострикционные графтполимеры, электрострикционную бумагу, электреты, электровязкоэластичные эластомеры и жидкокристаллические эластомеры.
Примерами ионных ЭАП являются сопряженные/проводящие полимеры, композиты ионный полимер-металл (КИПМ) и углеродные нанотрубки (УНТ). Другие примеры включают ионные полимерные гели.
Полевые ЭАП приводят в действие электрическим полем за счет прямой электромеханической связи. Они обычно требуют наличия высоких полей (вольт на метр), но низких токов. Полимерные слои обычно бывают достаточно тонкими для поддержания как можно более низкого возбуждающего напряжения.
Ионные ЭАП активируют электрически индуцированным переносом ионов и/или растворителя. Они обычно требуют низких электрических напряжений, но высоких токов. Для них требуется среда жидкого/гелевого электролита (хотя некоторые системы материалов также могут работать с использованием твердых электролитов).
Оба класса ЭАП обладают многочисленными членами соответствующих семейств, каждый из которых имеет свои собственные преимущества и недостатки.
Первым заметным подклассом полевых ЭАП являются пьезоэлектрические и электрострикционные полимеры. Хотя электромеханические характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в повышении этих характеристик привел к полимерам-релаксорам на основе ПВДФ, которые демонстрируют спонтанную электрическую поляризацию (вызываемое полем упорядочение). Эти материалы могут быть предварительно деформированы для достижения улучшенных характеристик в направлении деформации (предварительная деформация приводит к лучшему выстраиванию молекул). Обычно используются металлические электроды, поскольку деформации обычно происходят в умеренном режиме (1-5%). Также могут быть использованы и другие типы электродов (таких как проводящие полимеры, масла на основе углеродной сажи, гели или эластомеры, и т.д.). Электроды могут быть сплошными или сегментированными.
Другим представляющим интерес подклассом полевых ЭАП является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть проложена между соответствующими электродами, образуя конденсатор с пластинчатыми обкладками. В случае диэлектрических эластомеров магнитное натяжение, вызванное приложенным электрическим полем, приводит к натяжению на пленке, заставляя ее сжиматься по толщине и расширяться по площади. Деформационные характеристики обычно повышаются за счет предварительного растяжения эластомера (что требует наличия рамки для поддержания предварительного растяжения). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, который может быть использован: для низких и умеренных деформаций могут рассматриваться металлические электроды и электроды из проводящего полимера, для режима с высокой деформацией обычно используют масла на основе углеродной сажи, гели или эластомеры. Электроды могут быть сплошными или сегментированными.
Первым заметным подклассом ионных ЭАП являются композиты ионный полимер - металл (КИПМ). КИПМ состоят из набухшей при обработке растворителем ионообменной полимерной мембраны, ламинированной между двумя тонкими металлическими или углеродными электродами, и требуют использования электролита. Типичные материалы электродов – Pt, Gd, УНТ, CP, Pd. Типичные электролиты представляют собой водные растворы с Li+ и Na+. При приложении поля катионы обычно перемещаются к катодной стороне вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация по площади катода (растяжение) приводит к механическому напряжению в остальной полимерной матрице, что приводит к изгибанию к аноду. Изменение приложенного напряжения на обратное меняет направление изгиба. Хорошо известны такие полимерные мембраны, как Nafion® и Flemion®.
Другим заметным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Привод на основе сопряженного полимера обычно состоит из электролита, расположенного между двух слоев сопряженного полимера. Электролит используют для изменения состояния окисления. При приложении потенциала к полимеру через электролит электроны вводят в или удаляют из полимера, вызывая окисление и восстановление. Восстановление приводит к сжатию, а окисление – к расширению.
В некоторых случаях добавляют тонкопленочные электроды, когда в самом полимере отсутствует достаточная проводимость (по направлению параметра). Электролит может быть жидким, гелевым или твердым материалом (т.е. комплексом высокомолекулярных полимеров и солей металлов). Самыми распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Привод также может быть образован из углеродных нанотрубок (УНТ), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, позволяя осуществлять инжекцию зарядов. Эта инжекция заряда в двойной слой рассматривается в качестве первичного механизма в УНТ-приводах. УНТ действует как электродный конденсатор с инжектированным в УНТ зарядом, который затем уравновешивается двойным электрическим слоем, образующимся за счет перемещения электролитов к поверхности УНТ. Изменение заряда на атомах углерода приводит к изменениям длины связи C-C. В результате можно наблюдать расширение и сжатие одиночной УНТ.
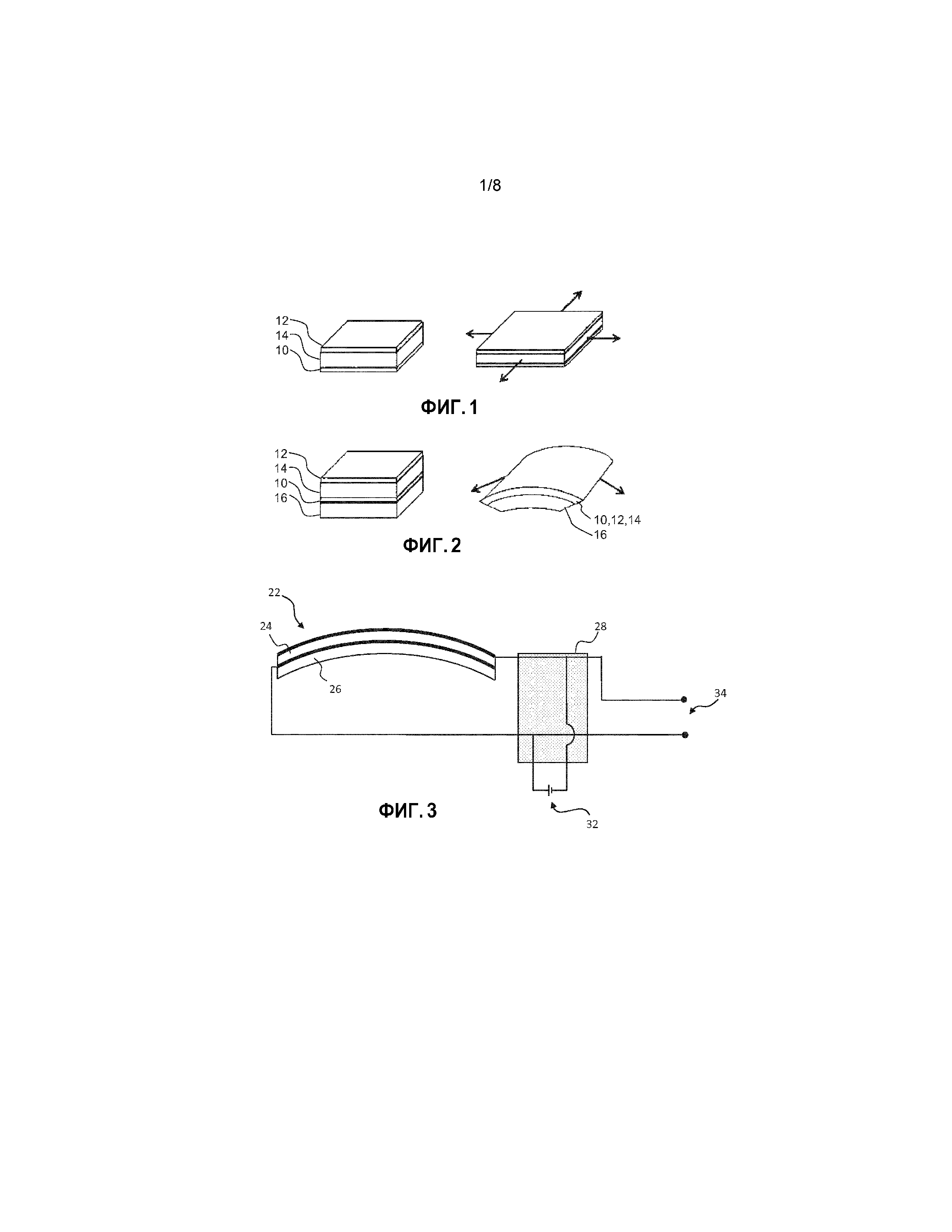
Фигуры 1 и 2 показывают два возможных режима работы устройства с ЭАП.
Устройство содержит слой 14 электроактивного полимера, расположенный между электродами 10, 12 на противоположных сторонах слоя 14 электроактивного полимера.
Фигура 1 показывает устройство, которое не зажато. Используемое напряжение заставляет слой электроактивного полимера расширяться по всем направлениям, как показано.
Фигура 2 показывает устройство, которое сконструировано таким образом, чтобы расширение возникало только по одному направлению. Устройство опирается на несущий слой 16. Используемое напряжение заставляет слой электроактивного полимера искривляться или изгибаться.
Характер этого перемещения обусловлен, например, взаимодействием между активным слоем, который расширяется при актюации, и пассивным несущим слоем. Для получения асимметричного искривления вокруг оси, как показано, может быть применена молекулярная ориентация (растягивание пленки), усиливающая движение в одном направлении.
Расширение по одному направлению может возникать из-за асимметрии в ЭАП-полимере, или же оно может возникать из-за асимметрии в свойствах несущего слоя, или сочетания того и другого.
Структура электроактивного полимера, как описано выше, может быть использована как для актюации, так и для восприятия. Наиболее выделяющиеся механизмы восприятия основаны на измерениях усилия (силы) и обнаружении деформации. Диэлектрические эластомеры, например, могут легко растягиваться под действием внешней силы. При установлении низкого электрического напряжения на датчике деформацию можно измерить как функцию электрического напряжения (электрическое напряжение зависит от площади).
Другим способом восприятия с помощью приводимых в действие полем систем является непосредственное измерение изменения емкости или измерение изменений электросопротивления электрода как функции деформации.
Датчики на основе пьезоэлектрического и электрострикционного полимера могут генерировать электрический заряд в ответ на приложенное механическое напряжение (при условии, что степень кристалличности достаточно высока для генерирования обнаружимого заряда). В сопряженных полимерах может использоваться пьезоионный эффект (механическое напряжение приводит к воздействию на ионы). При воздействии на них механического напряжения УНТ претерпевают изменение заряда на поверхности УНТ, которое может быть измерено. Также было показано, что электросопротивление УНТ изменяется при нахождении в контакте с газообразными молекулами (например, O2, NO2), что делает УНТ применимыми в качестве детекторов газа.
Было предложено скомбинировать способности устройств с ЭАП к восприятию и к актюации, например, для обеспечения функций восприятия давления и актюации, как правило, в различные моменты времени. Пример описан в US2014/0139239.
В US 2014/0139239 раскрыта система с ЭАП, содержащая цепь восприятия, цепь актюации и цепь переключения. Цепь восприятия выполнена с возможностью детектирования сигнала от ЭАП, когда он деформирован. Лишь после этого цепь переключения активирует цепь актюации таким образом, чтобы она могла генерировать актюацию на основании входного сигнала восприятия. Следовательно, восприятие и актюация отделены во времени друг от друга: восприятие и актюация происходят последовательно, вслед друг за другом.
Это разделение восприятия и актюации существенно ограничивает диапазон возможных применений датчиков-приводов на основе ЭАП, в частности, усложняя внедрение таких устройств там, где в ходе актюации требуется одновременная обратная связь по восприятию (такая как обеспеченная в более крупных масштабах, например, в виде сервомеханизма).
Одновременные восприятие и актюация возможны за счет увеличения размеров устройства для встраивания раздельных специальных областей восприятия и актюации, с раздельными комплектами электрических соединений. Однако, это невыгодно в тех применениях, где существенен небольшой форм-фактор.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Срабатывание ЭАП-привода в ответ на определенное электрическое напряжение зависит от температуры. Знание температуры в точном местоположении ЭАП может чрезвычайно улучшить точность актюации. Для многих применений с использованием приводов на коже, например, для приложения давления, может быть выгодным одновременно получать данные о температуре кожи для мониторинга (температура является одним из четырех основных показателей жизнедеятельности).
Поэтому существует потребность в измерении температуры в местоположении ЭАП-привода с минимальными дополнительными требованиями по сложности или пространству.
Эта потребность по меньшей мере частично удовлетворяется с помощью настоящего изобретения, охарактеризованного в независимых пунктах формулы изобретения. Зависимые пункты формулы изобретения обеспечивают выгодные варианты воплощения.
Согласно примерам в соответствии с одним аспектом изобретения предусмотрена система с датчиком на основе электроактивного материала, содержащая:
датчик на основе электроактивного материала; и
систему управления для выполнения измерений электрической характеристики, которая содержит импеданс или фазовый угол импеданса датчика на основе электроактивного материала на по меньшей мере первой и второй различных частотах,
причем система управления выполнена с возможностью выведения из упомянутых измерений температуры на датчике на основе электроактивного материала и внешнего давления или усилия, приложенного к датчику на основе электроактивного полимера.
Сигнал постоянного тока (DC) подразумевается включающим в себя по существу незнакопеременный электрический сигнал либо напряжения, либо тока. Аналогично, сигнал переменного тока (AC) подразумевается включающим в себя знакопеременный электрический сигнал любого из напряжения и тока, или их обоих.
Это изобретение предлагает датчик, который может быть использован в качестве датчика давления для восприятия нагрузки, например, контактного давления кожи, и в качестве датчика температуры.
Предпочтительно, датчик на основе электроактивного материала составляет устройство, которое функционирует как в качестве привода, так и в качестве датчика. Такой привод со встроенной функциональностью восприятия температуры способен измерять температуру в точном положении датчика/привода, которое всегда ближе, чем внешняя термопара. По сравнению с отдельным датчиком температуры может быть создано решение с более ограниченным занимаемым пространством.
Измерения позволяют определять давление или усилие и температуру на приводе, причем даже в ходе работы привода. Это может быть достигнуто путем использования наложения управляющего сигнала и измерительных сигналов. Механизм обратной связи, например, основан на электрическом сигнале высокой частоты и небольшой амплитуды, и этот сигнал измеряют попеременно на двух различных частотах для устранения влияния температуры на сигнал давления.
Первая частота является, например, резонансной частотой, при которой электрическая характеристика имеет максимальное или минимальное значение, такой как частота антирезонанса. Измерение на этой частоте используют для определения внешнего усилия или давления.
При приложении сигнала на частоте, согласующейся с частотой (незатухающего) антирезонанса, внезапное рассогласование, вызванное приложенной нагрузкой, выявляется, например, в виде последующего падения импеданса, измеряемого на датчике.
В качестве альтернативы, можно использовать управляющий сигнал, который согласуется с частотой (незатухающего) резонанса. В этом случае рассогласование может быть выявлено в виде последующего скачка импеданса, измеренного на датчике. В любом случае, сигнал высокой частоты, таким образом, обеспечивает восприятие приложенного к устройству внешнего давления или усилия одновременно с работой в качестве привода.
Вторая частота является частотой, при которой электрическая характеристика постоянна по отношению к нагрузке. Зато она изменяется с температурой, а значит, ее можно использовать для измерения температуры.
Система управления может быть выполнена с возможностью приложения управляющего сигнала, на который накладываются измерительные сигналы первой и второй частот, причем управляющий сигнал содержит уровень возбуждения постоянного тока или управляющий сигнал переменного тока с частотой ниже первой и второй частот.
За счет наложения низкоамплитудного, высокочастотного сигнала восприятия поверх сигнала первичного возбуждения более высокой амплитуды, функции восприятия и актюации могут быть реализованы одновременно. Амплитуда сигнала восприятия может быть значительно меньшей, чем амплитуда сигнала возбуждения, например, <10% амплитуды сигнала возбуждения, например, <1% амплитуды сигнала возбуждения. Таким образом, деформационный отклик в структуре электроактивного полимера (ЭАП) может быть пренебрежимым у сигнала восприятия по сравнению с таким откликом, стимулированным сигналом возбуждения. Следовательно, достоверность, точность и стабильность устройства в качестве привода не ставится под угрозу.
Первый управляющий сигнал (сигнал возбуждения) может быть сигналом постоянного тока (хотя и с меняющимся в зависимости от желаемой актюации уровнем постоянного тока), или может иметь знакопеременную амплитуду (сигнал переменного тока). Частота сигнала возбуждения в последнем случае также может быть значительно меньшей, чем частота сигнала восприятия, например, на по меньшей мере два порядка величины ниже, во избежание интерференции сигнала привода с измерительным сигналом.
Это позволяет осуществлять одновременные восприятие и актюацию. Два измерительных сигнала различных частот могут быть приложены последовательно. В качестве альтернативы, различные частоты измерения могут быть наложены друг на друга, поскольку величина нерезонансной частоты может выбираться свободно.
Система может содержать матрицу датчиков, в которой по меньшей мере некоторые из датчиков имеют различные первые частоты. Таким образом, различные датчики могут быть приведены в режим восприятия путем приложения подходящего измерительного сигнала. Например, каждый из их множества может иметь различный размер и/или форму и/или геометрию, с обеспечением за счет этого различной резонансной частоты. Различные первые частоты могут обнаруживаться в измеренных сигналах импеданса, и это, например, используют для определения того, к какому именно датчику в матрице или комплекте прикладывается какая-либо нагрузка. Следовательно, может быть возможным более точное определение положения приложенного давления.
Контроллер может быть выполнен с возможностью модификации выведенного внешнего усилия или давления, исходя из выведенной температуры. Таким образом, сигнал температуры может быть не только источником полезной информация, но и может быть использован для обеспечения температурной компенсации функции восприятия усилия или давления.
Электрическая характеристика предпочтительно содержит величину импеданса, такую как последовательное сопротивление.
Изобретение будет в общем работать с электроактивными материалами. Однако особо пригодными материалами будут органические электроактивные материалы и/или полимерные электроактивные материалы. Они имеют электроактивные характеристики, подходящую температурную зависимость, а также обладают простотой обработки для того, чтобы их можно было встраивать в устройства, такие как вводимые в полости человеческого тела (например, катетеры). Электроактивный материал (полимер) может содержать сегнетоэлектрик-релаксор. В качестве неограничивающего примера таких полимерных материалов могут быть использованы сегнетоэлектрики-релаксоры на основе терполимеров (т.е. ПВДФ-ТрФЭ-ХФЭ или ПВДФ-ТрФЭ-ХТФЭ). Они не являются сегнетоэлектриками в отсутствии приложенного поля, что означает, что когда управляющий сигнал не приложен, электромеханической связи нет. Когда сигнал смещения постоянного тока приложен, например, электромагнитная связь становится ненулевой. Сегнетоэлектрики-релаксоры дают большие величины деформации привода и большую чувствительность восприятия по сравнению с другими известными материалами ЭАП. Однако устройство не ограничено использованием сегнетоэлектриков-релаксоров, и в вариантах воплощения могут быть использованы пьезоэлектрические материалы ЭАП (такие как, лишь в качестве примера, ПВДФ или ПВДФ-ТрФЭ). Другие примеры либо будут известны специалистам в данной области техники, либо будут описаны здесь ниже. Выбранных материалов также будут придерживаться для способа по изобретению.
Примеры в соответствии со вторым аспектом изобретения предлагают способ восприятия с использованием датчика на основе электроактивного материала, содержащий:
выполнение измерений электрической характеристики датчика на основе электроактивного материала на по меньшей мере первой и второй различных частотах; и
выведение из этих измерений температуры на датчике и внешнего давления или усилия, приложенного к датчику.
Этот способ может быть использован в качестве способа восприятия, или же он может быть использован в ходе актюации, вследствие чего он содержит комбинированный способ восприятия и актюации, например, с использованием наложенного высокочастотного сигнала переменного тока, который используют для измерения электромеханического отклика электроактивного материала (т.е. представленного электрической характеристикой) на двух конкретных частотах. Одна из них предпочтительно представляет собой характеристическую частоту электромеханического резонанса, используемую для восприятия усилия или давления. Эта первая частота представляет собой, например, резонансную частоту, такую как частота антирезонанса, при которой электрическая характеристика имеет максимальное или минимальное значение.
Вторая частота предпочтительно находится за пределами диапазона резонанса/антирезонанса и используется для измерения температуры. Вторая частота представляет собой, например, частоту, при которой электрическая характеристика постоянна по отношению к приложенной нагрузке.
Способ может содержать приложение управляющего сигнала привода и наложение измерительных сигналов первой и второй частот, причем управляющий сигнал привода содержит уровень возбуждения постоянного тока или управляющий сигнал переменного тока с частотой ниже первой и второй частот. Выведенное внешнее усилие или давление могут быть модифицированы, исходя из выведенной температуры.
Первая и вторая частоты могут быть получены путем выполнения операции калибровки, причем операция калибровки содержит применение первой развертки по частоте без сигнала возбуждения и применение второй развертки по частоте с сигналом возбуждения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения далее будут подробно описаны со ссылкой на прилагаемые чертежи, на которых:
Фигура 1 показывает известное устройство на основе электроактивного полимера, которое не зажато;
Фигура 2 показывает известное устройство на основе электроактивного полимера, которое ограничено подкладочным слоем;
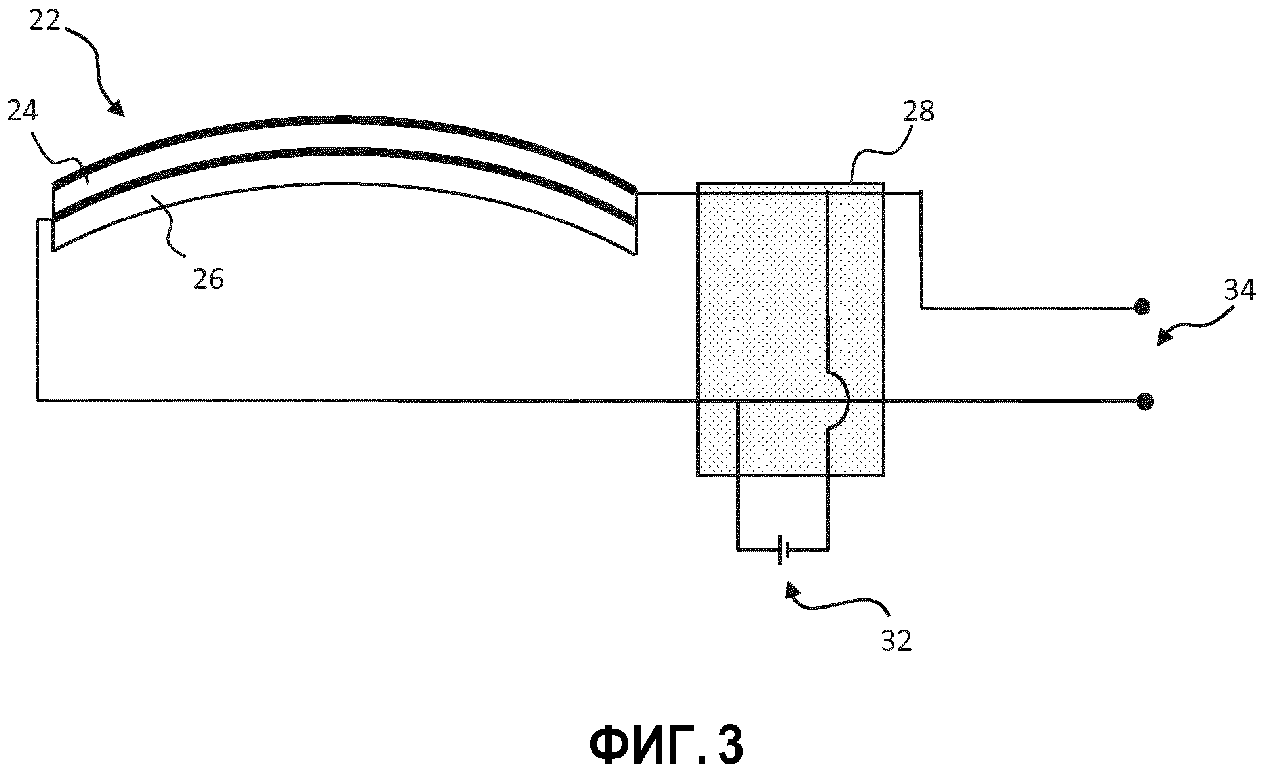
Фигура 3 показывает первый пример устройства на основе электроактивного полимера;
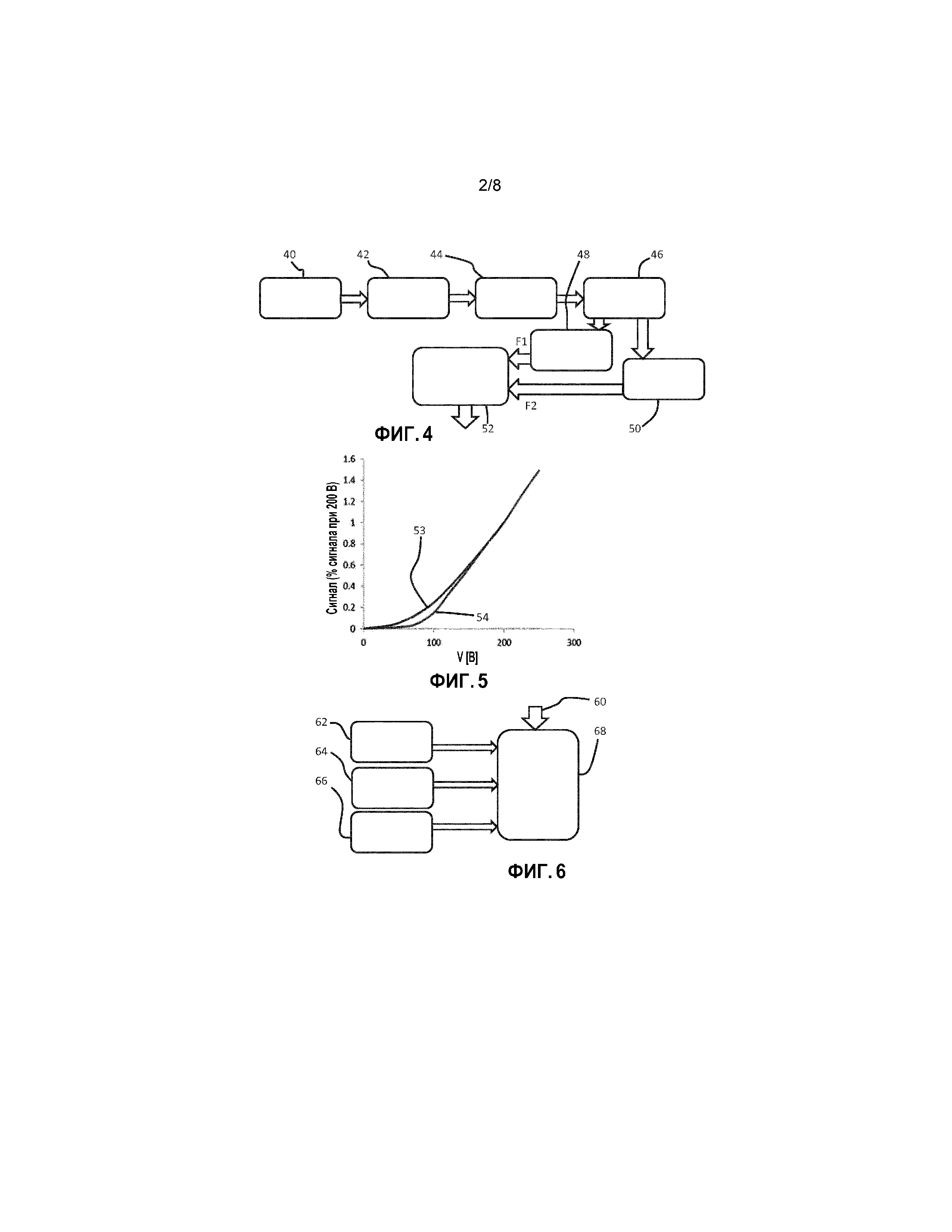
Фигура 4 показывает способ калибровки;
Фигура 5 представляет собой график, показывающий, как может быть использована функция только датчика;
Фигура 6 показывает способ восприятия для использования после калибровки;
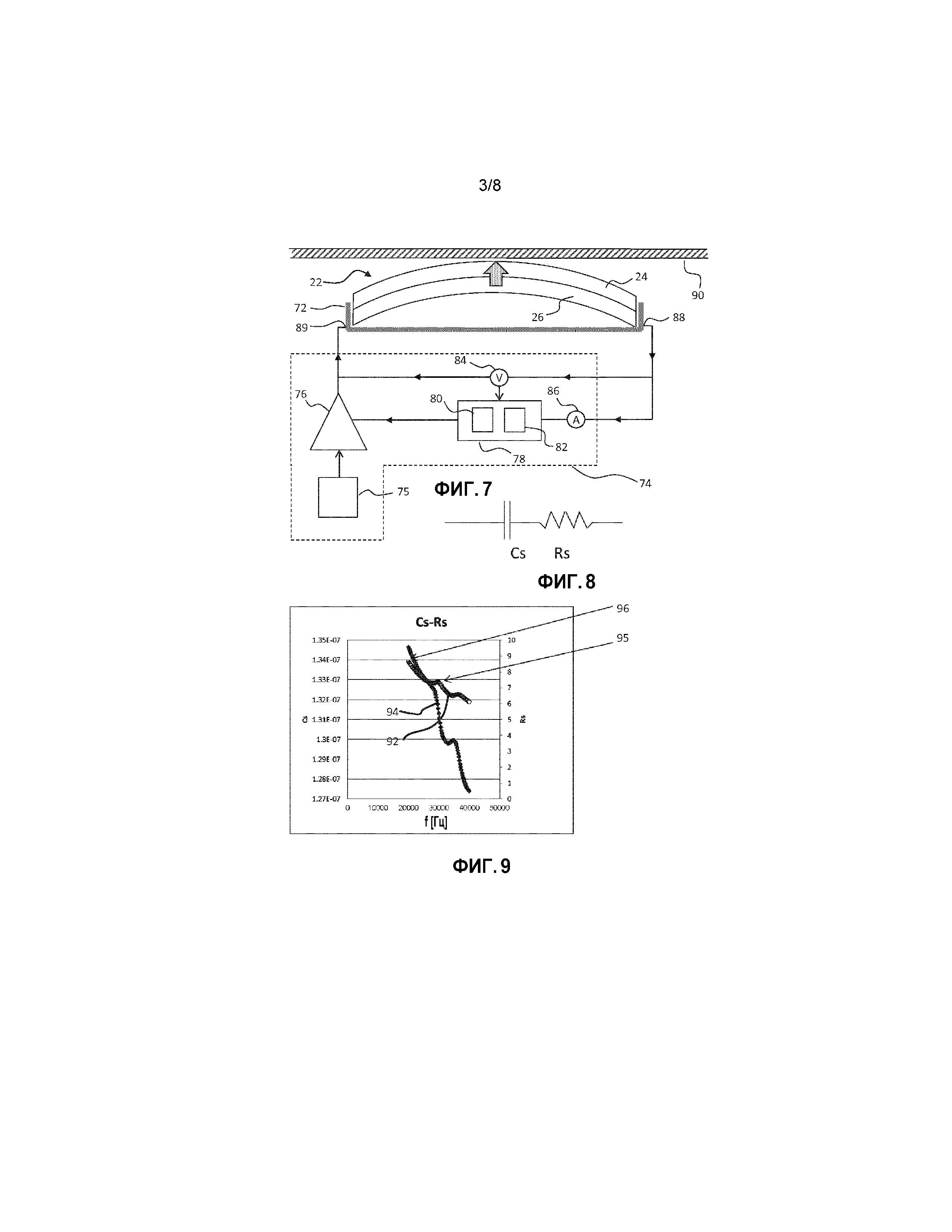
Фигура 7 более подробно показывает устройство на основе электроактивного полимера по фигуре 3;
Фигура 8 показывает одну эквивалентную схему устройства на основе ЭАП;
Фигура 9 показывает изменения электросопротивления и емкости с частотой;
Фигура 10 показывает изменения с частотой для двух различных напряжений возбуждения;
Фигура 11 показывает, как разница между графиками на фигуре 10 может быть использована для выявления резонансных частот;
Фигура 12 показывает зависимость импеданса от нагрузки для различных температур при резонансе;
Фигура 13 показывает зависимость импеданса от нагрузки для различных температур далеко от резонанса;
Фигура 14 показывает воспроизводимость зависимости импеданса от температуры;
Фигура 15 показывает, как температурная компенсация может быть использована для улучшения восприятия нагрузки;
Фигура 16 используется для разъяснения того, как могут быть использованы фазовые измерения.
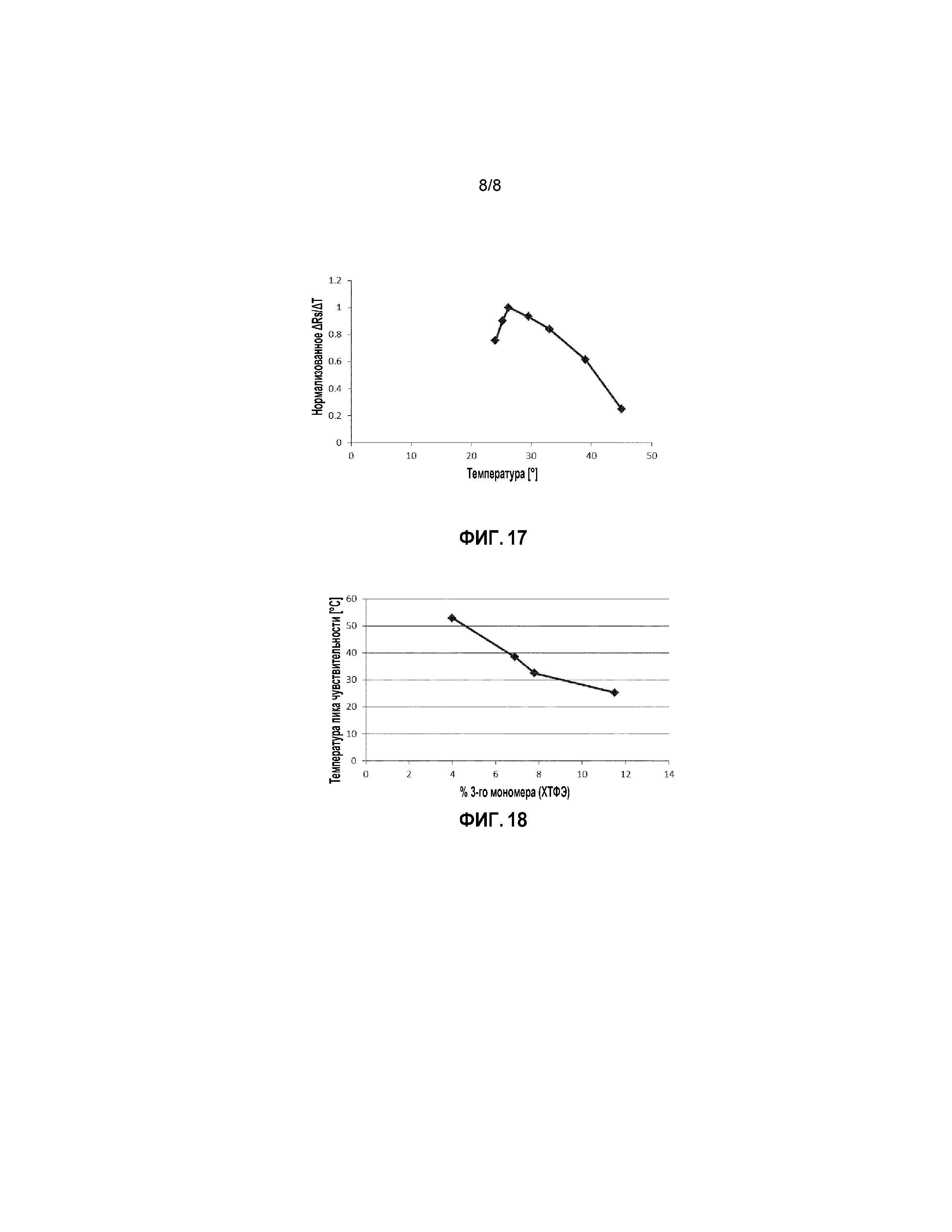
Фигура 17 показывает зависимость чувствительности примерного материала с определенным составом от температуры; и
Фигура 18 показывает соотношение между чувствительностью и составом.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Изобретение предлагает систему датчика на основе электроактивного полимера, содержащую датчик на основе электроактивного полимера и систему управления для выполнения измерений, относящихся к импедансу (полному сопротивлению) датчика на основе электроактивного полимера (ЭАП-датчика) на по меньшей мере первой и второй различных частотах. Из этих измерений может быть определена температура на датчике и внешнее давление или усилие, приложенное к датчику. ЭАП-датчик, таким образом, можно использовать в качестве датчика давления и в качестве датчика температуры. При использовании в сочетании с актюацией, ЭАП-привод со встроенной функциональностью восприятия температуры способен измерять температуру в точном положении ЭАП, которое всегда ближе, чем внешняя термопара.
На фигуре 3 показана схематическая иллюстрация простого первого исполнения устройства привода и датчика согласно вариантам воплощения изобретения. ЭАП-привод 22, содержащий верхний слой 24 материала ЭАП, расположенный поверх нижнего несущего слоя 26, электрически соединен через обрабатывающий сигналы элемент 28 с первым входом 32 управляющих сигналов (постоянного тока) и вторым входом 34 управляющих сигналов (переменного тока). Первый вход 32 управляющих сигналов предназначен для приложения управляющего сигнала возбуждения (относительно) высокой мощности. Второй вход 34 сигналов предназначен для приложения знакопеременного сигнала восприятия (относительно) низкой мощности, и в частности, на двух различных частотах, как будет обсуждаться ниже. Обрабатывающий сигналы элемент накладывает друг на друга первый и второй управляющие сигналы с образованием третьего комбинированного управляющего сигнала, который затем подают на устройство.
Обрабатывающий сигналы элемент может в некоторых примерах содержать ряд входящих в его состав элементов для выполнения, например, функций анализа сигналов, функций совмещения и разделения сигналов и/или функций генерирования сигналов. В последнем случае первый и второй входы 32 и 34 управляющих сигналов могут быть заключены внутри самого блока 28 обработки, причем блок обработки содержит элементы для генерирования сигналов переменного тока и/или постоянного тока, и в некоторых случаях, элементы для анализа электрических параметров одного или обоих сигналов.
Электрические соединения в исполнении по фигуре 3 показаны подключенными к электродам на верхней и нижней плоских поверхностях структуры со слоем ЭАП, например. Для этой цели могут быть использованы компоновки с гибкими электродами. Приложение напряжений постоянного тока и/или переменного тока к электродам позволяет генерировать электрическое поле на слое ЭАП, которое стимулирует соответствующую деформацию.
Хотя первый вход 32 управляющих сигналов в исполнении по фигуре 3 содержит вход постоянного тока, в альтернативных исполнениях этот вход может содержать вход управляющего сигнала переменного тока. В любом случае, относительная мощность управляющего сигнала возбуждения значительно превышает относительную мощность приложенного сигнала восприятия. В случае, когда оба сигнала содержат сигналы переменного тока, максимальная амплитуда сигнала восприятия (приложенного на входе 34) может быть ниже, чем 10% от максимальной амплитуды управляющего сигнала возбуждения (приложенного на входе 32), например, ниже, чем 1% от максимальной амплитуды управляющего сигнала возбуждения. В случае, когда сигнал восприятия содержит сигнал переменного тока, а сигнал возбуждения содержит сигнал смещения постоянного тока фиксированной амплитуды, максимальная амплитуда сигнала переменного тока может быть ниже, чем 10% от фиксированной амплитуды сигнала смещения постоянного тока, например, ниже, чем 1% от фиксированной амплитуды сигнала смещения постоянного тока.
В случае примера по фигуре 3 третий комбинированный сигнал, сгенерированный обрабатывающим сигналы элементом 28, содержит сигнал переменного тока высокой частоты и низкой амплитуды, наложенный поверх сигнала смещения постоянного тока высокой амплитуды.
Как описано в предыдущих разделах, подача смещения постоянного тока с достаточной амплитудой на слой электроактивного полимера стимулирует расширение слоя полимера. Если этот слой связан с пассивным несущим слоем 26, то расширение полимера приводит к деформации, например, к изгибанию или скручиванию всей структуры, что может быть использовано для обеспечения силы привода. На фигуре 3 структура 22 привода показана в «активном» или «активированном» состоянии, в котором прикладывают смещение постоянного тока с достаточной величиной, чтобы вызвать деформацию структуры. Как хорошо известно, степень расширения меняется в зависимости от величины электрического поля/электрического тока, приложенного к устройству. Следовательно, варьируя амплитуду смещения постоянного тока, можно вызвать деформацию с различающимися уровнями/степенью, а также с различающимися величинами прикладываемых сил привода (или, например, различающимися величинами выполненной работы привода).
Высокочастотный сигнал переменного тока, наложенный поверх смещения постоянного тока, также стимулирует проявляющийся в механической деформации отклик в материале, но такой деформационный отклик, который является периодическим, а не фиксированным (т.е. колебание). Однако, поскольку максимальная амплитуда высокочастотного сигнала значительно ниже, чем амплитуда сигнала смещения постоянного тока (например, на два порядка величины ниже, чем амплитуда сигнала смещения постоянного тока, например, 1% от амплитуды сигнала постоянного тока), соответствующая амплитуда смещения из-за стимулированной деформации фактически пренебрежимо мала по сравнению со смещением из-за первичного возбуждения. Следовательно, наложение сигнала восприятия не влияет на точность и стабильность актюации.
Наложение колебательного сигнала низкой амплитуды поверх постояннотокового смещения позволяет встроить электрический механизм обратной связи в сам механизм управления первичным приводом. На определенных частотах, в частности, на частотах, которые совпадают с частотой механического резонанса структуры 22 привода или являются гармониками данной частоты, в материале привода устанавливается небольшая механическая стоячая волна. Это, в свою очередь, влияет на электрические характеристики материала. При возбуждении сигнала восприятия на резонансной частоте материала соответствующий импеданс материала ниже (по сравнению со случаем возбуждения на нерезонансной частоте) из-за того, что механическая вибрация находится в одной фазе с электрическим управляющим сигналом.
Частота механического резонанса структуры представляет собой такую частоту, при которой структура будет естественным образом стремиться к колебанию, смещаясь от своего положения равновесия, и определяется внутренними структурными свойствами структуры (например, геометрией, размером, формой, толщиной и т.д.). Механические колебания структуры ЭАП не обязательно будут следовать задающей частоте приложенного к ней электрического сигнала, а будут стремиться отходить назад, к ее естественной резонансной частоте, причем задающая частота интерферирует с частотой колебаний либо конструктивно, либо деструктивно, в зависимости от той степени, на которую задающая частота находится либо не в фаза, либо в фазе с естественной частотой колебания (резонансной частотой).
При возбуждении высокочастотного сигнала на частоте антирезонанса структуры ЭАП (т.е. первой гармонике резонансной частоты), импеданс ЭАП выше из-за механической вибрации материала, находящейся не в фазе с колебанием управляющего сигнала (электрически индуцированные механические деформации находятся не в фазе с электрическим возбуждением). Иными словами, всякий раз, когда, например, положительный ток подают на ЭАП с помощью управляющего сигнала, несинфазные механические деформации в этот момент наводят ток в противоположном направлении (т.е. не совпадающую по фазе характеристику). В идеальном (модельном) случае эти противоположные токи гасят друг друга, и никакой ток не может течь совсем (т.е. возникает бесконечно большой импеданс), но в сценариях из реальной жизни полное гашение не возникает, и этот эффект измеряют как (эффективное) более высокое электросопротивление электрическому току (т.е. более высокий импеданс). В частности, когда сигнал возбуждают на частоте антирезонанса материала привода, импеданс ЭАП находится на максимуме.
Такая взаимозависимость может быть лучше понята при рассмотрении нижеприведенного уравнения (1). Импеданс идеального ЭАП при резонансе и антирезонансе зависит от конкретного типа или режима деформации. Самым распространенным является приведение ЭАП в поперечный резонанс (т.е. по длине или ширине). Импеданс ЭАП определяется диэлектрическими свойствами материала и электромеханической связью и электрическими и механическими потерями. Для простоты, пренебрегая электрическими и механическими потерями, для ЭАП с длиной l, шириной w и толщиной t, деформирующегося в поперечном направлении, импеданс ЭАП задан уравнением:
где εT33 – диэлектрическая постоянная, k31 – коэффициент поперечной электромеханической связи, p – плотность ЭАП, и sE11 – податливость в поперечном направлении. На частоте антирезонанса, ωa,  и Z наивысший.
и Z наивысший.
Реальный ЭАП имеет потери и может быть смоделирован или представлен конденсатором с резистором, подключенными последовательно, электросопротивление которых является наивысшим на частоте антирезонанса. Поэтому в последующих описаниях понятия «импеданс» и «последовательное сопротивление» (Rs) могут быть использованы взаимозаменяемо по отношению к устройству. Однако последовательное сопротивление в этом контексте следует понимать как относящееся просто к модели, в которой привод/датчик представлен электронно в виде конденсатора, последовательно соединенного с резистором, обладая электросопротивлением Rs.
Вследствие вышеописанного соотношения между импедансом и резонансом, когда управляющий сигнал возбуждают на частоте антирезонанса, любые возникающие в его частоте небольшие отклонения от антирезонанса будут обнаруживаться в виде соответствующего резкого падения в измеряемом импедансе структуры ЭАП 22. Это тот физический эффект, который позволяет добиться механического восприятия. Приложение нагрузки (т.е. давления или усилия) к структуре ЭАП приводит к ослаблению любых резонансных эффектов, которые возникают в материале. Если управляющий сигнал осциллирует на частоте антирезонанса или резонанса материала при приложении нагрузки, эффект ослабления будет выявляемым в осуществляемых в режиме реального времени измерениях импеданса ЭАП (т.е. последовательного сопротивления Rs), поскольку внезапное прерывание резонанса будет влиять на возникающее вследствие этого резкое снижение импеданса. А значит, отслеживая импеданс структуры с течением времени, когда привод находится в работе (например, путем мониторинга напряжения и тока высокочастотного сигнала с течением времени), можно воспринимать приложенные к структуре давления и нагрузки, а в некоторых случаях и количественно измерять их (как будет описано ниже).
Связь между импедансом, с одной стороны, и разностью фаз между электрической задающей частотой сигнала и частотой механических колебаний материала, с другой стороны, позволяет добиться высокочувствительного измерения приложенных к ЭАП механических сил лишь посредством мониторинга электрических свойств управляющего сигнала. А значит, это обеспечивает очень простое, понятное и эффективное средство достижения одновременных актюации и восприятия с использованием единого устройства на основе ЭАП. Более того, варианты воплощения изобретения позволяют одновременно осуществлять восприятие и актюацию на одной и той же области структуры ЭАП (т.е. пространственно совместные восприятие и актюацию). Это означает, что устройство, выполняющее обе функции, можно изготавливать с намного меньшим форм-фактором, не жертвуя, например, чувствительностью или разрешением восприятия. Более того, устройство требуется снабдить лишь одним единственным комплектом соединений (в противоположность двум или более комплектам соединений, по одному для каждой специально предназначенной для восприятия или актюации области), что является выгодным с точки зрения снижения стоимости и сложности, и в случаях, когда требуются, например, водонепроницаемые соединения (скажем, в бритье/катетерах/гигиене ротовой полости), и/или когда необходимо построить матрицу приводов/датчиков.
Кроме того, при подходящем выборе сигналов восприятия и подходящей обработке сигналов, восприятие обеспечивает получение данных о температуре, а также о нагрузке. В частности, генерируют измерительные сигналы по меньшей мере первой и второй различных частот, а обрабатывающий сигналы элемент 28 используют для измерения одной или более электрических характеристик привода 30 на этих двух частотах измерения. Таким образом, определяют как температуру на приводе, так и внешнее давление или усилие, приложенное к приводу.
Частота каждого из высокочастотных сигналов восприятия может обычно находиться в диапазоне от 1 кГц до 1 МГц, в зависимости от конкретной геометрии привода. Следует отметить, что в случае, когда управляющий сигнал привода содержит управляющий сигнал переменного тока, частота этого сигнала значительно ниже, чем частота знакопеременного сигнала восприятия. Напряжение возбуждения (низкой частоты) в этом случае может быть, например, на по меньшей мере два порядка величины меньшим, чем напряжение высокочастотного сигнала, во избежание интерференции сигнала привода с измерительным сигналом.
Как было разъяснено выше, на частоте антирезонанса измеренный импеданс будет выше из-за несинфазной механической вибрации. В частности, последовательное сопротивление (Rs) привода при данной частоте находится на локальном максимуме. В варианте реализации данную частоту используют в качестве первой из частот измерения. Задают другую частоту измерения, находящуюся вне диапазона частот электромеханической связи, и ее используют в качестве второй частоты измерения.
Для определения используемых частот и для определения соотношения между измеренным электросопротивлением и приложенной нагрузкой при упомянутой определенной частоте резонанса может быть использован способ калибровки. Фигура 4 показывает один пример.
Выполняют первую развертку 40 по частоте при приложенном постояннотоковом смещении 0 В, и измеряют отклики по электросопротивлению. Тем самым измеряют эквивалентное последовательное сопротивление привода на различных частотах с получением зависимости импеданса от частоты, при отсутствии сигнала возбуждения.
Затем, на этапе 42 прикладывают фиксированное постояннотоковое смещение, предпочтительно соответствующее желаемому состоянию актюации устройства. При этом приложенной к устройству нагрузки может и не быть.
Затем, на этапе 44 выполняют вторую развертку по частоте при фиксированном ненулевом постояннотоковом смещении и записывают соответствующие значения электросопротивления. Снова измеряют эквивалентное последовательное сопротивление привода на различных частотах с получением зависимости импеданса от частоты, при наличии сигнала возбуждения.
Затем, на этапе 46 сравнивают результаты этих двух разверток для определения разности полученных значений электросопротивления, для каждой по диапазону частот.
На этапе 48 определяют первую частоту, для которой измеренные значения электросопротивления различаются на наибольшую величину, и тем самым непосредственно выявляют частоту антирезонанса.
На этапе 50 задают вторую частоту измерения. Она представляет собой частоту, при которой это разность незначительна. Таким образом, она представляет собой частоту, при которой электрическая характеристика постоянна по отношению к нагрузке.
Следует отметить, что в некоторых случаях этапы с 40 по 50 могут быть повторены для столь многих напряжений постоянного тока, сколько желательно, например, для сбора данных, относящихся к множеству различных положений актюации, в случае, когда при работе устройства приходится использовать переменную степень актюации.
Для устройства с одним датчиком будет необходимо единое возбуждение, которое приводит датчик в активированное состояние, при котором он готов выполнять восприятие. Таким образом, необходима лишь одна управляемая калибровка.
Например, датчик может быть установлен в некое положение и использован с того момента лишь в качестве датчика. Этот случай можно рассматривать как соответствующий единому уровню возбуждения, используемому для получения множественных измерений показаний. Функция восприятия может быть использована с постояннотоковым смещением в пределах определенного диапазона. Однако, этот диапазон может включать в себя напряжения смещения постоянного тока, для которых какая-либо физическая актюация отсутствует, но, тем не менее, имеется чувствительность к приложенной нагрузке. В частности, кривая актюации (зависимость актюации от приложенного напряжения) является нелинейной, с пороговым электрическим напряжением, ниже которого физическая актюация не начинается. В этом случае функция восприятия становится возможной даже без физической деформации, хотя воспринятый сигнал будет меньше, чем для большего постояннотокового смещения.
Фигура 5 показывает график интенсивности сигнала восприятия фиксированной нагрузки при различных напряжениях возбуждения, в виде графика 53. График 54 показывает уровень актюации для этих напряжений возбуждения (с произвольным масштабом). Видно, что чувствительность повышается быстрее, чем актюация, для напряжений, возрастающих от исходного нулевого уровня.
Типичный диапазон постояннотокового смещения только для восприятия может находиться в диапазоне, например, от 40 В до 50 В, или 40-75 В, где чувствительность выше нуля, но актюация все еще нулевая или близка к нулю (соответственно).
На этапе 52 по фигуре 4 выводят данные калибровки для значения импеданса в форме зависимости последовательного сопротивления на устройстве от приложенной нагрузки, при фиксированном напряжении смещения постоянного тока, и фиксированной частоте сигнала переменного тока, равной первой частоте антирезонанса.
Кроме того, получают значение импеданса для каждой температуры в представляющем интерес диапазоне и для каждого возможного сигнала возбуждения. На второй частоте значение импеданса получают для каждой температуры в представляющем интерес диапазоне, для каждого возможного сигнала возбуждения и для каждой возможной нагрузки.
Таким образом, на этапе 52 осуществляют множественные измерения при различных температурах и с различными приложенными нагрузками. Этот процесс калибровки имеет место на предприятии, и при этом генерируют справочную таблицу для Rs на частоте 1 и частоте 2 для переменной приложенной нагрузки и температуры. При каждой температуре измеряют полный диапазон нагрузок. Эту справочную таблицу используют в качестве сравнения в ходе эксплуатации.
Таким образом, привод калибруют для получения зависимости импеданса от нагрузки для каждого приложенного электрического напряжения (если имеется множество приложенных напряжений) и в каждой точке температуры в диапазоне температур.
В ходе актюации измеренное значение импеданса на первой частоте в сочетании с приложенным электрическим напряжением дает меру усилия на приводе, а значение импеданса на второй частоте дает меру температуры ЭАП-привода. Амплитуда смещения из-за высокочастотного сигнала (датчика) незначительна по сравнению со смещением из-за актюации, так что она не помешает актюации с точки зрения точности или стабильности.
Фигура 6 показывает способ, который используют в ходе эксплуатации привода. Принимают упомянутые данные калибровки, как представлено стрелкой 60. Этап 62 включает в себя измерение импеданса на первой частоте калибровки. Его используют для восприятия нагрузки (т.е. давления или усилия). Этап 64 включает в себя измерение импеданса на второй частоте калибровки. Его используют для восприятия температуры.
В ходе этих измерений, на этапе 66 прикладывают сигнал возбуждения с более высокой амплитудой. Она может быть постоянной для реализации только датчика, либо она может быть переменной для датчика и привода. Этап 68 включает в себя выведение нагрузки на приводе и температуры.
Эти два параметра могут быть выданы из системы в виде отдельных выходных сигналов. В качестве альтернативы, информация о температуре может быть использована внутри системы для обеспечения температурной компенсации воспринятой нагрузки.
Первый пример будет описан более подробно, исходя из сигнала возбуждения постоянного тока, как показано на фигуре 7.
Как было разъяснено выше, ЭАП-привод 22 имеет слой 24 материала ЭАП и пассивный несущий слой 26 и удерживается в кожухе 72, и электрически связан с механизмом 74 возбуждения сигналов. Этот механизм возбуждения в примере по фигуре 7 содержит как элементы генерирования сигнала (управляющие элементы), так и элементы обработки и анализа сигнала (элементы датчика).
Элемент 75 управления приводом генерирует управляющий сигнал привода с высокой амплитудой (например, фиксированное напряжение смещения постоянного тока), который передается прибору-усилителю 76 сигналов. Элемент 78 управления датчиком содержит, как элемент-драйвер 80 для генерирования сигналов датчика, так и обрабатывающий элемент 82 для анализа электрических свойств сигналов датчика после прохождения через привод. Для этой цели, механизм 74 возбуждения дополнительно содержит вольтметр 84, подключенный на ЭАП-приводе 22, и амперметр 86, подключенный последовательно между выходным электрическим выводом 88 привода и элементом 78 управления датчиком. Вольтметр 74 и амперметр 76 оба сигнально соединены с элементом 78 управления датчиком, так что генерированные ими данные могут быть использованы процессором 82 для определения импеданса привода 22 (т.е. эквивалентного последовательного сопротивления Rs, где устройство смоделировано в виде идеального конденсатора с последовательно подключенным резистором, т.е. вещественной частью комплексного импеданса).
Управляющие сигналы, сгенерированные элементом 75 управления приводом и элементом 78 управления датчиком, налагаются друг на друга элементом-усилителем 76, либо перед их совместным усилением, либо после их независимого усиления. В некоторых примерах элемент-усилитель 76 может быть заменен просто блоком объединения (сумматором). В этом случае элемент 75 управления приводом и элемент 78 управления датчиком могут быть выполнены с возможностью локального усиления сгенерированных сигналов ими возбуждения (актюации) и восприятия (считывания), перед их выдачей блоку объединения.
Комбинированный управляющий сигнал затем передают на входной вывод 89 ЭАП-привода 22. Постояннотоковая компонента высокой амплитуды комбинированного управляющего сигнала стимулирует деформационный отклик в приводе.
Для наиболее воспроизводимых (т.е. надежных/точных) результатов, ЭАП может быть зажат в своем положении. Например, привод может быть зажат в кожухе 72, а кожух может быть затем расположен так, чтобы совместить устройство с целевой зоной актюации.
Для иллюстрации, на фигуре 7 показана целевая зона 90 актюации, при этом привод деформируется под действием управляющего сигнала постоянного тока с приложением давления к целевой зоне. В примерах целевая зона могла бы, например, содержать область кожи человека, например, таким образом, чтобы и давление могло быть приложено к коже, но и одновременно устройством воспринимались усилие и температура, которыми кожа воздействует на привод (например, может восприниматься, насколько сильно пользователь прижимает содержащее привод устройство к своей коже).
В некоторых примерах может быть дополнительно предусмотрен (необязательный) механизм передачи усилий, предназначенный для подачи усилий контролируемым образом к или от поверхности привода.
Переменнотоковая компонента низкой амплитуды управляющего сигнала стимулирует периодический отклик низкой амплитуды в слое 24 ЭАП, например, колебания структуры на ее резонансной или антирезонансной частоте.
Напряжение комбинированного управляющего сигнала и результирующий ток подают к элементу 78 управления датчиком. Обычно значения переменного тока могут находиться в диапазоне от 0,1 мА до 1 мА, но они могут составлять до 10 мА. Более высокие токи могут вызвать слишком сильный нагрев.
В некоторых случаях механизм 74 возбуждения может дополнительно содержать один или более элементов разделения сигналов, например, фильтр пропускания верхних частот, в целях выделения высокочастотных компонент для анализа обрабатывающим элементом 82 элемента 78 управления датчиком.
Обрабатывающий элемент 82 элемента 78 управления датчиком может использовать выданные вольтметром 84 и амперметром 86 измерения для определения последовательного сопротивления на приводе, испытываемого приложенным(и) управляющим(и) сигналом (сигналами). Последовательное сопротивление может определяться в режиме реального времени и контролироваться, например, на внезапные изменения в электросопротивлении, которые, как разъяснено выше, могут быть использованы в качестве указания на наличие и величину нагрузок и давлений, приложенных к приводу 22.
ЭАП-привод имеет приблизительную эквивалентную схему из последовательно подключенных конденсатора Cs и резистора Rs, как показано на фигуре 8.
Поясненная выше развертка, которую используют для определения частоты антирезонанса (точки наивысшей чувствительности), показана на фигуре 9.
Измеренное последовательное сопротивление (в Омах) отложено по одной оси y, по другой оси y отложена измеренная емкость (в Фарадах), а частота сигнала датчика (в Гц) – по оси x.
График 92 показывает электросопротивление, а график 94 – емкость. Для этого образца в качестве частоты антирезонанса определена частота около 29,8 кГц как результат локального пика электросопротивления, показанного позицией 95. В качестве второй частоты выбирают частоту на удалении от этой точки, такую как точка 96 на 20 кГц. Графики приведены для напряжения смещения 200 В.
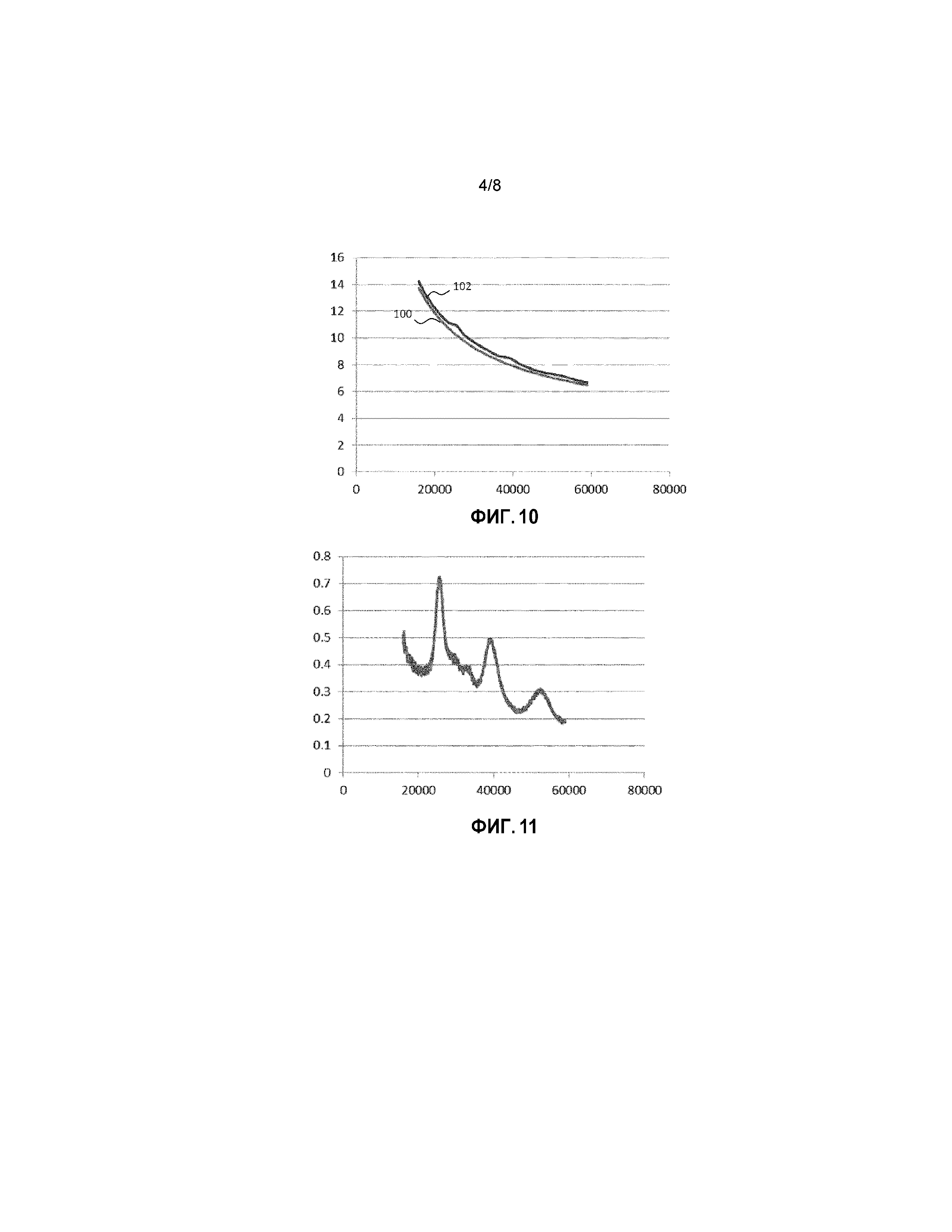
Как разъяснено выше, пики легче всего определяются путем сопоставления графиков. Фигура 10 показывает измерение электросопротивления для развертки при 0 В в виде графика 100 (который не показывает никаких вариаций от первичной кривой, которая отражает просто емкостную функцию комплексного импеданса) при изменении частоты переменного тока. При смещении 0 В связь небольшая или полностью отсутствует, а значит, имеется нулевой (или неизмеримо малый) деформационный отклик в материале на сигнал переменного тока. Следовательно, развертка со смещением 0 В обеспечивает удобную базовую линию, с которой можно сравнивать развертку по частоте переменного тока при более высоком (вызывающем актюацию) напряжении постоянного тока. График 120 представляет собой развертку с приложенным смещением постоянного тока.
Частота антирезонанса устройства может быть выявлена путем нахождения той частоты переменного тока, для которой разность между измеренными значениями электросопротивления при двух напряжениях постоянного тока наибольшая.
На фигуре 11 более четко проиллюстрирована разность между двумя трассами сигнала, с разностью в измеренном электросопротивлении по оси y и соответствующей частотой сигнала датчика по оси x. На этом графике отчетливо видны два больших скачка в электросопротивлении, причем больший из двух – это скачок, возникающий при антирезонансе.
Хотя для первой развертки в данном примере использовано постояннотоковое смещение 0 В, в альтернативных примерах может быть использовано иное (ненулевое) первое смещение. В этом случае, в зависимости от величины первого напряжения, первая развертка может указывать на отклонения от или пики на центральной кривой. Однако, частота антирезонанса может быть все еще найдена путем выявления той частоты, для которой разница между измеренными значениями электросопротивления при двух напряжениях постоянного тока является наибольшей.
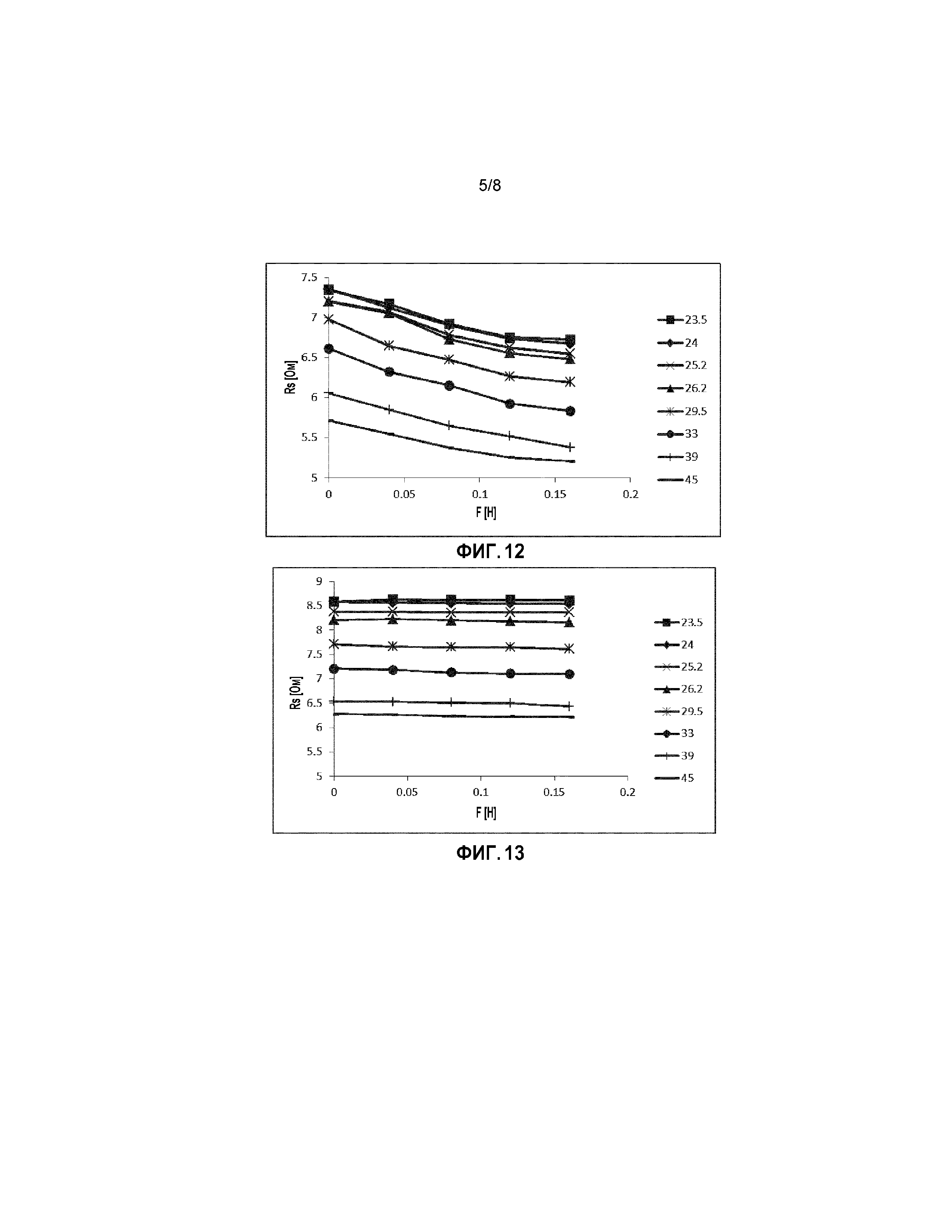
Нагрузка также оказывает влияние на последовательное сопротивление привода, за счет ослабления резонансно-антирезонансной характеристики. Это показано на фигуре 12, где построены графики электросопротивления Rs при антирезонансе, измеренном на приводе со смещением 200 В, относительно нагрузки. Каждый график приведен для разной температуры, и виден дрейф сдвига по температуре.
На второй частоте (вне диапазона резонансной связи) нет никакого влияния электромеханической связи. На этой частоте электросопротивление является лишь функцией температуры, как показано на фигуре 13, на которой представлены графики электросопротивления относительно нагрузки. Электросопротивление отображено для нерезонансной частоты (20 кГц), вновь измеренной для привода со смещением 200 В.
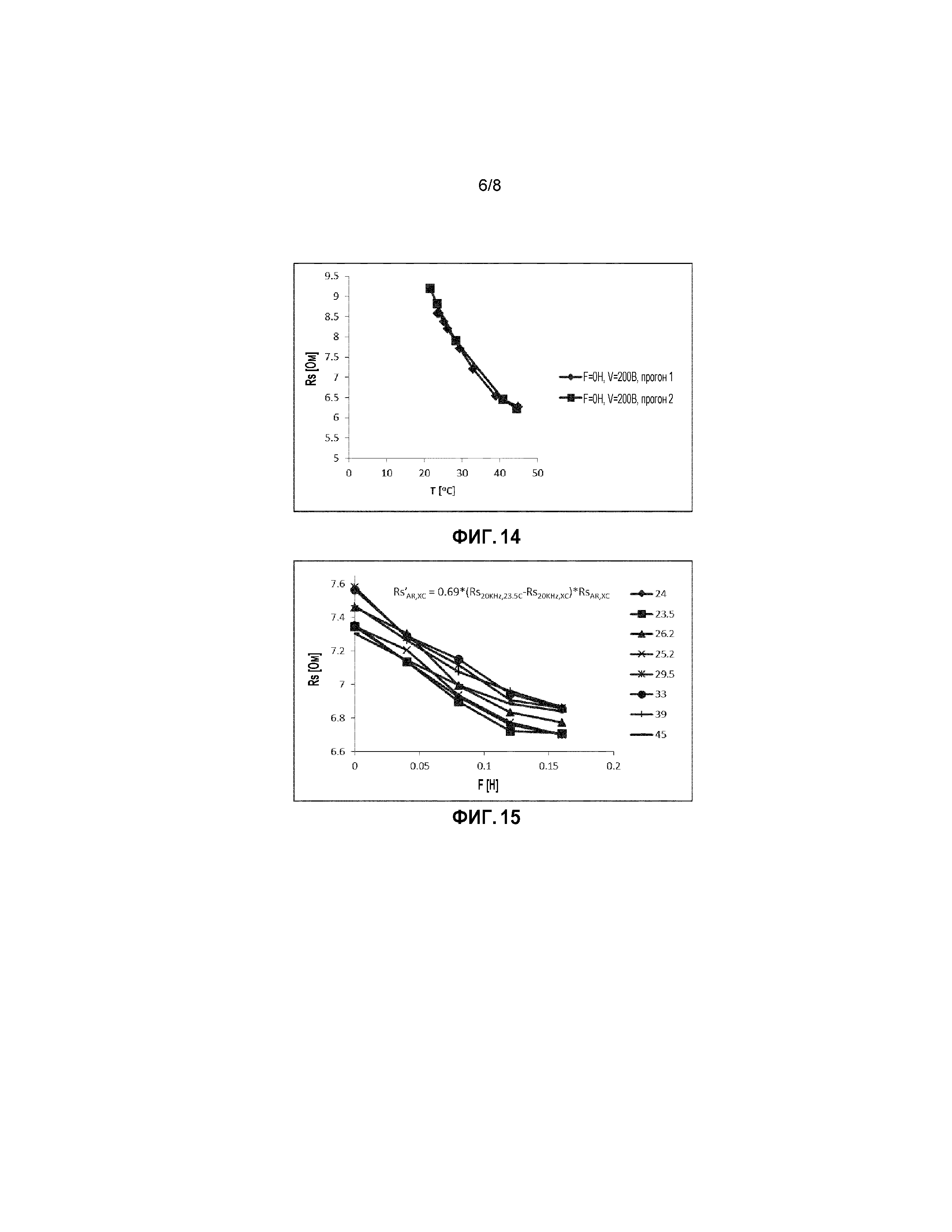
Дрейф сдвига по температуре виден, но отсутствует какое-либо влияние из-за приложенной нагрузки. Как показано на фигуре 14, сигнал температуры воспроизводим, поскольку на фигуре 14 представлены графики зависимости электросопротивления от температуры для нулевой нагрузки, для двух прогонов.
Сигнал температуры также может быть использован для компенсации сигнала привода, чтобы улучшить точность датчика нагрузки. На фигуре 15 скомпенсированное значение электросопротивления в зависимости от нагрузки дано для 8 различных температур от 23 до 45 градусов. Средняя разница между 23 градусами и 45 градусами теперь составляет 3,8% вместо 29% для нескомпенсированного измерения.
Вышеприведенный пример основан на сигнале возбуждения постоянного тока. Во втором примере представлен низкочастотный сигнал привода переменного тока. Для низкочастотной актюации переменного тока привод электрически нагружают низкочастотным напряжением переменного тока и высокочастотным напряжением переменного тока малой амплитуды. Это высокочастотное напряжение малой амплитуды используют для измерения и накладывают его на низкочастотный сигнал переменного тока привода. Низкочастотное напряжение переменного тока привода вызывает деформацию в ЭАП, которая может быть использована в целях актюации.
Низкочастотное напряжение возбуждения предпочтительно обладает частотой, по меньшей мере на 2 порядка величины меньшей (т.е. <1%), чем высокочастотный сигнал, во избежание интерференции сигнала привода с измерительным сигналом.
В третьем примере для калибровки системы сканирование по частоте не требуется. Это позволяет снизить сложность и стоимость системы. Однако, все еще может быть обеспечена надежность и чувствительность. При производстве, частота (анти)резонанса (fr) привода будет жестко контролироваться, так что заданный набор из двух частот на точку температуры в диапазоне температур априори известен, а значит, измерение на этих двух заданных частотах всегда будет указывать на нагрузку на приводе (частота 1) и температуру (частота 2).
В четвертом примере может быть обеспечено устройство восприятия или устройство восприятия и актюации, содержащее множество устройств согласно вышеописанным примерам, например, расположенных упорядоченно в виде матрицы, или другой желаемой компоновки/формы. В примерах это множество устройств может быть выполнено таким образом, что каждое обладает уникальной частотой механического резонанса fr. Таким образом, при приложении высокочастотных сигналов восприятия к матрице устройств, характеристическая (уникальная) частота резонанса каждого устройства может быть использована для определения того, какой привод в матрице стимулируется в качестве датчика, т.е. для установления положения датчика/привода в матрице.
Например, общий управляющий сигнал может быть приложен ко всем устройствам в матрице, причем этот общий сигнал содержит последовательную серию сигналов различных частот (т.е. различных известных частот резонанса или антирезонанса устройств). Если временная развертка частот более быстрая, чем входной сигнал датчика, то соответствующее падение (или подъем) импеданса будет обнаруживаться на устройствах только для той частоты, которая соответствует конкретному устройству, которое стимулировано, т.е. измеренный импеданс будет падать с приближением развертки по частоте к fr, соответствующей стимулированному устройству, а затем подниматься вновь (или наоборот) с движением развертки от fr. В такой системе можно использовать fr (или Rs) для выявления того, какой привод используется в качестве датчика, т.е. для определения положения датчика/привода в матрице.
Приведенный выше пример позволяет использовать измерение импеданса для определения приложенной нагрузки. Вместо обнаружения (изменения) последовательного сопротивления можно обнаруживать изменение частоты антирезонанса для выведения соответствующего сигнала обратной связи.
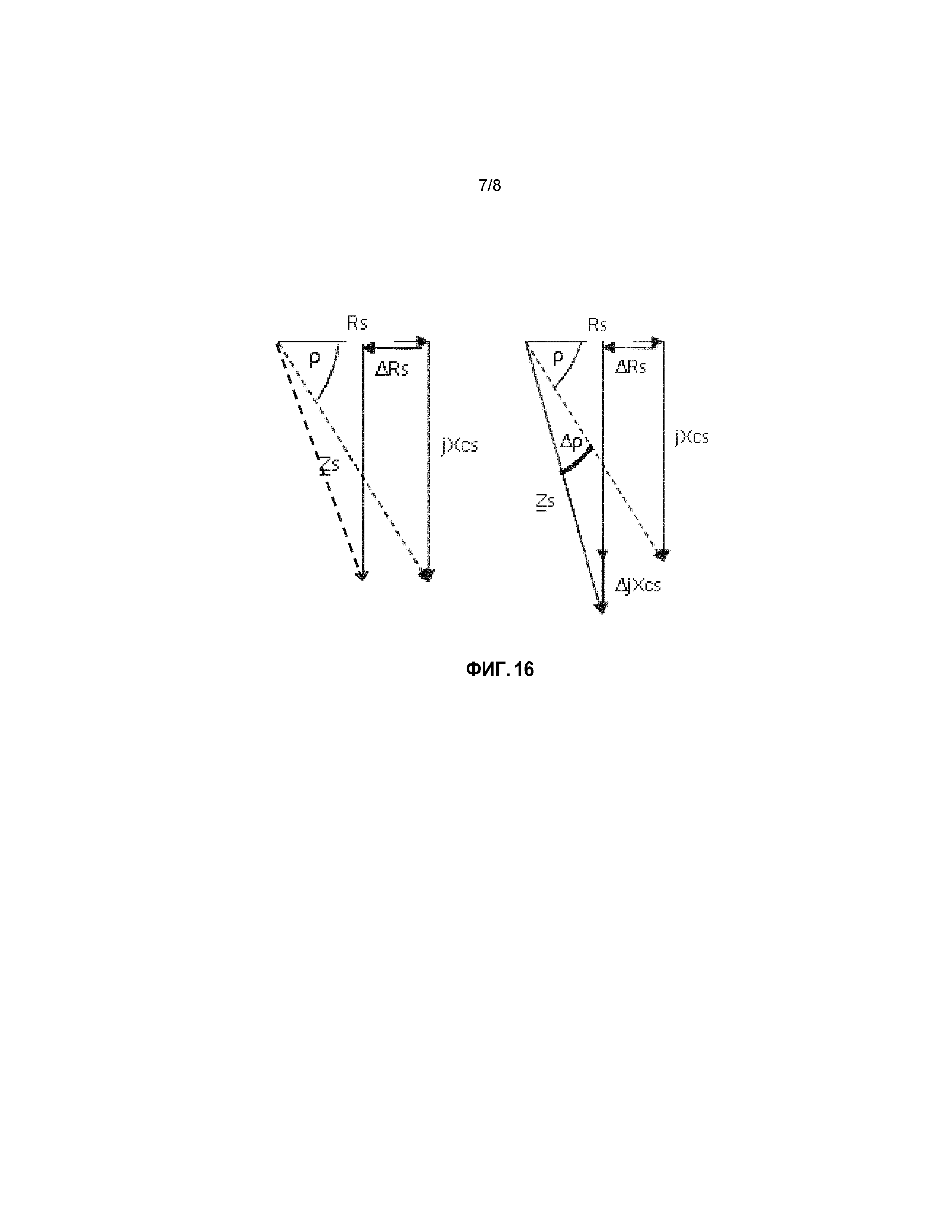
В качестве альтернативы, вместо обнаружения (изменения) последовательного сопротивления (или изменения частоты антирезонанса) может быть определено изменение фазы, в частности фазовый угол комплексного импеданса. Изменение последовательного сопротивления Rs относительно мало. Для повышения чувствительности оно может быть скомбинировано с другой зависимой переменной.
На фигуре 16 изменение Rs показано слева, а изменение Cs и Rs показано справа.
Правое изображение показывает, как фазовый угол комплексного импеданса изменяется на повышенную величину (Δρ) в ответ на снижение реальной части импеданса и повышение мнимой части импеданса. Фаза может быть выявлена путем измерения изменения фазы между током и напряжением. В частности, если ЭАП имеют тонкие слои, эффект изменений мнимой части импеданса (jXcs) может стать преобладающим. Несомненно, любые измерения, коррелирующие с комплексным импедансом, могут быть использованы как означающие нагрузку на привод.
Чувствительность функции восприятия температуры может быть отрегулирована путем подходящего выбора состава используемых полимеров (ЭАП-привода/датчика). Состав может быть отрегулирован для получения наибольшей чувствительности датчика к желаемой рабочей температуре.
Например, в полимерном материале (ПВДФ-ТрФЭ-ХТФЭ) это может быть достигнуто путем варьирования содержания ХТФЭ.
Фигура 17 показывает чувствительность примерного материала (ПВДФ-ТрФЭ-ХТФЭ) с определенным составом в зависимости от температуры, и она демонстрирует максимальную чувствительность при 26 градусах Цельсия. Этот примерный материал имеет содержание ХТФЭ в 10%.
Фигура 18 показывает зависимость между подходящей рабочей температурой и содержанием ХТФЭ в полимере (ПВДФ-ТрФЭ-ХТФЭ), и демонстрирует температуру, при которой чувствительность по температуре наивысшая, в зависимости от процентного содержания ХТФЭ. Как показано, повышенное содержание ХТФЭ приводит к пониженной температуре, при которой чувствительность наибольшая. Например, полимер с 7% ХТФЭ может быть использован для применений внутри тела, где температура выше, чем у находящегося в помещении датчика при комнатной температуре.
Подходящие для слоя ЭАП материалы известны. Электроактивные полимеры включают, но не ограничены ими, следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, сегнетоэлектрические полимеры-релаксоры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, композиты ионный полимер-металл, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но не ограничен ими:
поливинилиденфторид (ПВДФ), поливинилиденфторид-трифторэтилен (ПВДФ-ТрФЭ), поливинилиденфторид-трифторэтилен-хлорфторэтилен (ПВДФ-ТрФЭ-ХФЭ), поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (ПВДФ-ТрФЭ-ХТФЭ), поливинилиденфторид-гексафторпропилен (ПВДФ-ГФП), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но не ограничен ими:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но не ограничен ими:
полипиррол, поли-3,4-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
Ионные устройства могут быть получены на основе композитов ионный полимер-металл (КИПМ) или сопряженных полимеров. Композитом ионный полимер-металл (КИПМ) является синтетический композиционный наноматериал, который демонстрирует поведение искусственной мышцы при приложенном напряжении или электрическом поле.
Более подробно, КИПМ состоят из ионного полимера, такого как Nafion или Flemion, поверхности которого химическим или физическим способом покрыты проводниками, такими как платина или золото, или углеродные электроды. При приложенном напряжении миграция и перераспределение ионов, вызванная приложенным к полоске из КИПМ напряжением, приводит к деформации изгиба. Полимер представляет собой набухшую при обработке растворителем ионообменную полимерную мембрану. Поле заставляет катионы перемещаться к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к растяжению полимера. Деформация в области катода приводят к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибу к аноду. Изменение приложенного напряжения на обратное выворачивает изгиб в обратную сторону.
Если покрытые электроды установлены в несимметричной конфигурации, наложенное напряжение может вызвать любые виды деформаций, таких как скручивание, сворачивание, перекашивание, закручивание и несимметричная деформация изгиба.
Во всех этих примерах могут быть предусмотрены дополнительные пассивные слои для оказания влияния на электрическое и/или механическое поведение слоя ЭАП в ответ на приложенное электрическое поле.
Слой ЭАП каждого блока может быть расположен между электродами. Электроды могут растягиваться настолько, чтобы они следовали за деформацией слоя материала ЭАП. Подходящие для электродов материалы также известны и могут быть выбраны, например, из группы, состоящей из тонких пленок металлов, таких как золото, медь или алюминий, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (ПАНИ), поли(3,4-этилендиокситиофен) (ПЭДОТ), например, поли(3,4-этилендиокситиофен) поли(стиролсульфонат) (ПЭДОТ:ПСС). Также могут быть использованы пленки металлизированного сложного полиэфира, такие как металлизированный полиэтилентерефталат (ПЭТ), например, с использованием алюминиевого покрытия.
Изобретение может быть применено во многих приложениях ЭАП и фотоактивных полимеров, включая примеры, где интерес представляет выполненный на пассивной матрице массив приводов или датчиков, или комбинированных датчиков и приводов.
Изобретение, если это представляет интерес, в общем предназначено для восприятия нагрузки и температуры. Оно также может быть использовано, если необходима комбинированная функциональность восприятия и актюации.
Во многих применениях основная функция продукта основана на (локальном) восприятии и, необязательно, на манипуляции тканями человека, или на актюации контактирующих с тканями интерфейсов. В таких применениях ЭАП-приводы, например, обеспечивают уникальные преимущества, в основном из-за небольшого форм-фактора, гибкости и высокой плотности энергии. Следовательно, ЭАП и фоточувствительные полимеры могут быть легко встроены в мягкие, имеющие трехмерную форму и/или миниатюрные продукты и интерфейсы. Примерами таких применений являются:
средства косметической обработки кожи, такие как устройства для активации кожи в виде выполненных на основе чувствительных полимеров кожаных аппликаторов, которые прикладывают постоянное или циклическое растяжение к коже для того, чтобы вызвать натяжение кожи или уменьшить морщины;
дыхательные устройства с маской интерфейса пациента, которая имеет выполненный на основе чувствительного полимера активный амортизатор или уплотнитель для обеспечения переменного нормального давления на кожу, которое снижает или препятствует возникновению лицевых красных пятен;
электробритвы с адаптивной бреющей головкой. Высота контактирующих с кожей поверхностей может быть отрегулирована с использованием приводов на основе чувствительных полимеров для того, чтобы повлиять на баланс между близостью к коже и ее раздражением;
устройства для очистки ротовой полости, такие как воздушная межзубная нить с приводом с динамическим соплом, для повышения области воздействия спрея, особенно в пространствах между зубами. В качестве альтернативы, зубные щетки могут быть снабжены активированными пучками;
приборы потребительской электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь посредством матрицы преобразователей на основе чувствительных полимеров, которая встроена в или вблизи пользовательского интерфейса;
катетеры с регулируемым кончиком для обеспечения возможности легкого вхождения в извитые кровеносные сосуды и движения в них.
Другая категория подходящего применения, которая выигрывает от таких приводов, относится к модифицированию света. Оптические элементы, такие как линзы, отражающие поверхности, дифракционные решетки и т.д., можно сделать адаптивными по форме или по положению адаптации с использованием этих приводов. При этом одним преимуществом ЭАП является, например, снижение энергопотребления.
Другие разновидности раскрытых вариантов воплощения могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения, из изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает наличия других элементов или этапов, а единственное число не исключает множественности. Тот лишь факт, что определенные признаки указаны в отличных друг от друга зависимых пунктах формулы изобретения, не означает, что нельзя с пользой использовать сочетание этих признаков. Любые ссылочные обозначения в формуле изобретения не следует рассматривать как ограничивающие его объем.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Осветительное устройство для полов
Интерактивная бутылочка для кормления ребенка
Система управления устройством
Приемопередающее устройство для нательной связи и связи вне тела
Автостереоскопическое устройство отображения, имеющее оптическое увеличение
Автостереоскопическое устройство отображения
Устройство ухода за кожей на основе света, предотвращающее лиоп в воздухе
Устройство автостереоскопического отображения
Устройство для срезания волос
Система и способ управления лекарственными средствами

