Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится, в общем, к способам и системам контроля транспортного средства для распределения крутящего момента между двигателем и электрической машиной.
Уровень техники/Раскрытие изобретения
Гибридный силовой агрегат может приводиться в действие комбинацией двигателя и электрической машины, такой как электрический мотор. Электрическая машина может улучшить управляемость, компенсируя колебания крутящего момента двигателя во время переключения передач. Гибридный силовой агрегат может дополнительно содержать модуль накопления энергии для питания электрической машины. Для эффективного использования бортового запаса топлива и энергии, хранящейся в модуле накопления энергии, запрашиваемый крутящий момент транспортного средства могут стратегически разделять (или распределять) между двигателем и электрической машиной.
Попытки решить проблемы с распределением крутящего момента содержат распределение крутящего момента на основе характеристик двигателя. Один из примерных подходов показан Симоном младшим (Simon, JR.) с соавторами в патенте США US 2009/0204280. В данном документе запрос крутящего момента к двигателю и мотору регулируют с помощью предварительной калибровки на основе потенциальных возможностей двигателя и мотора.
Тем не менее, авторы настоящего изобретения признают потенциальные проблемы, связанные с такими системами. В качестве одного из примеров, при эксплуатации транспортного средства на заданном маршруте, например, в гоночном соревновании, вес транспортного средства может влиять на характеристики транспортного средства. Например, малый вес транспортного средства является предпочтительным для достижения максимального продвижения транспортного средства. Вес транспортного средства могут уменьшать путем распределения высокого крутящего момента для увеличения потребления бортового запаса топлива. Кроме того, сжигание избыточного топлива при рекуперативном торможении может подзаряжать модуль накопления энергии и расширять диапазон электрического вклада от электрической машины. В идеальном случае, выработка энергии в устройстве накопления энергии и истощение бортового запаса топлива могут совпадать с окончанием гонки. Разрядка аккумулятора до окончания гонки может привести к дополнительному весу аккумулятора без обеспечения преимуществ по мощности. Выработка бортового запаса топлива на ранней стадии гонки может привести к потере преимущества по электрическому содействию и уменьшению выходного крутящего момента.
В одном из примеров, раскрытые выше проблемы могут быть решены с помощью способа, в котором управляют гибридным силовым агрегатом для подачи крутящего момента на колеса транспортного средства на протяжении заданного маршрута движения; и распределяют крутящий момент между двигателем и электрической машиной на основе массы транспортного средства. Таким образом, могут достигать максимальной мощности на единицу веса в среднем на протяжении заданного маршрута.
В качестве одного из примеров, оптимальное распределение крутящего момента между двигателем и электрической машиной могут определять с помощью оптимизации функции затрат, построенной на основе модели транспортного средства. В качестве примера, могут оптимизировать распределение крутящего момента для достижения максимальной скорости транспортного средства. В качестве другого примера, могут оптимизировать распределение крутящего момента для достижения оптимального профиля скорости. Модель транспортного средства может содержать несколько функций для расчета ускорения транспортного средства на основе входных данных, в том числе количества топлива на борту. При внесении в модель транспортного средства количества топлива на борту, при решении задачи оптимизации для оптимального распределения крутящего момента, учитывается влияние изменения массы транспортного средства во время гонки. Параметры модели транспортного средства (то есть, коэффициенты и форматы нескольких функций модели транспортного средства) могут обновлять в конце каждой гонки на основе маршрутных данных, полученных во время гонки и предыдущих гонок, а также предыдущей негоночной эксплуатации транспортного средства. Маршрутные данные могут содержать выходной крутящий момент двигателя, выходной крутящий момент электрического мотора, скорость транспортного средства, степень заряженности аккумулятора, и количество топлива на борту в каждом местоположении во время маршрута. При обновлении модели транспортного средства, при определении оптимального распределения крутящего момента, учитываются механические изменения и изменения окружающей среды в системе транспортного средства. Например, механическое изменение может содержать износ или регулировку в механической системе транспортного средства; а изменение окружающей среды может содержать изменение погоды и дорожных условий.
Следует понимать, что вышеприведенное краткое раскрытие служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого уникально определен формулой изобретения, приведенной после подробного раскрытия. Кроме того, заявленный объект изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 показан примерный гибридный силовой агрегат.
На фиг. 2 показан примерный двигатель внутреннего сгорания гибридного силового агрегата, показанного на фиг. 1.
На фиг. 3 показана блок-схема для оптимизации распределения крутящего момента.
На фиг. 4 показан примерный способ управления распределением крутящего момента гибридного силового агрегата, показанного на фиг. 1.
На фиг. 5 изображены временные графики распределения крутящего момента и примерные параметры транспортного средства при реализации способа, показанного на фиг. 4.
Осуществление изобретения
Настоящее изобретение относится к системам и способам для управления распределением крутящего момента между двигателем и электрической машиной (например, электрическим мотором) на заданном маршруте в гибридном силовом агрегате. Примерный гибридный силовой агрегат представлен на фиг. 1. Силовой агрегат может содержать двигатель внутреннего сгорания, показанный на фиг. 2. Разделение крутящего момента могут выбирать с помощью уровней распределения крутящего момента, генерируемых оптимизационным алгоритмом. На фиг. 3 показана блок-схема для оптимизации распределения крутящего момента. Уровни распределения крутящего момента оптимизируют на основе маршрутных данных, полученных во время эксплуатации транспортного средства на заданном маршруте. Для сокращения времени в пути на заданном маршруте, могут обновлять запрос водителя с помощью оптимизированных уровней распределения крутящего момента. На фиг. 4 показан примерный способ итерационной оптимизации распределения крутящего момента на основе модели транспортного средства. Модель транспортного средства могут обновлять маршрутными данными во время каждой итерации. Временные графики уровней распределения крутящего момента и выбранные параметры транспортного средства во время реализации показанного на фиг. 4 способа, изображены на фиг. 5.
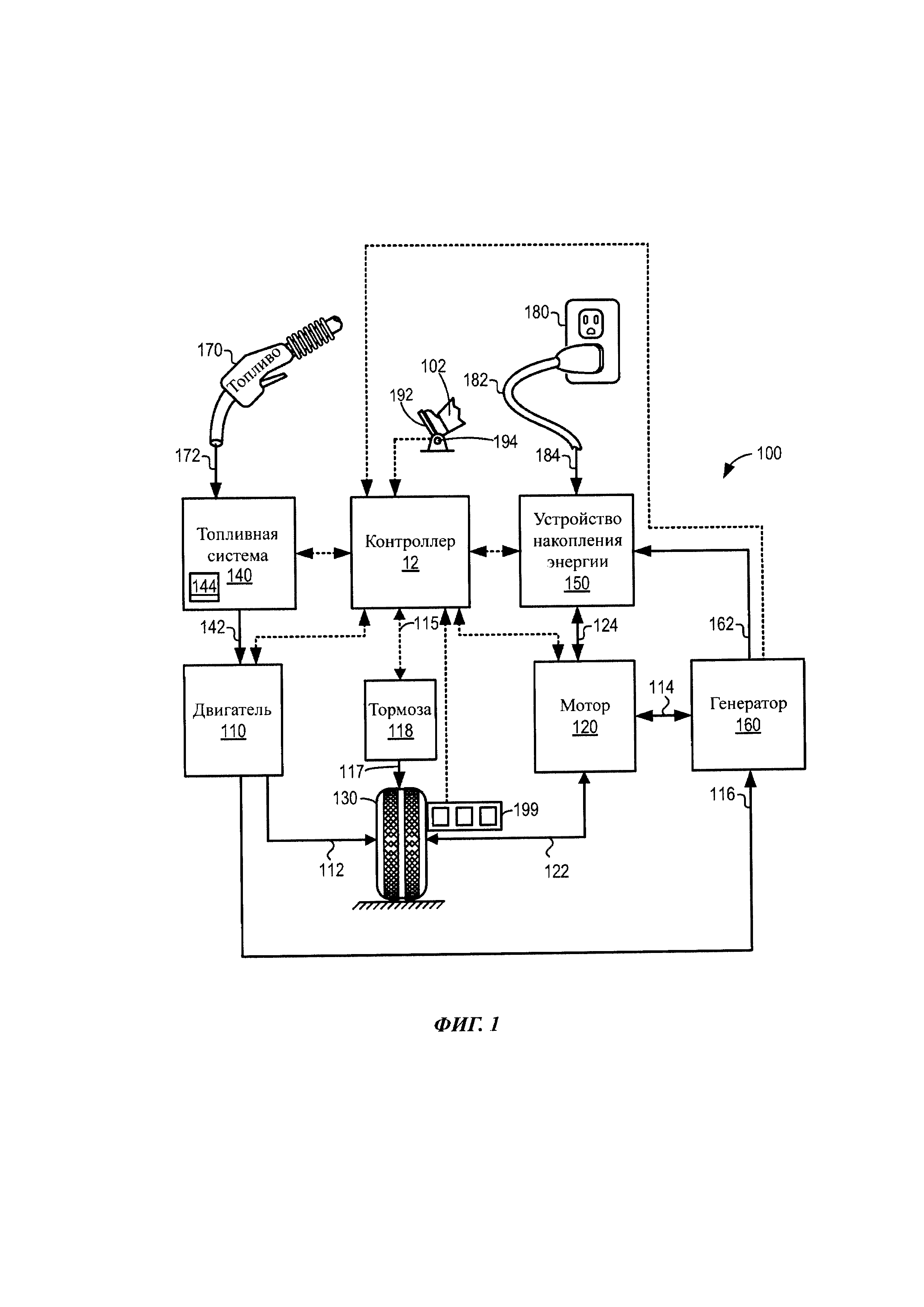
На фиг. 1 и изображен примерный гибридный силовой агрегат 100. Гибридный силовой агрегат 100 содержит сжигающий топливо двигатель 110 и мотор 120. В качестве неограничивающего примера, двигатель 110 включает двигатель внутреннего сгорания, а мотор 120 включает электрический мотор. Мотор 120 может быть выполнен с возможностью использования или потребления иного источника энергии, отличающегося от источника, используемого двигателем 110. Например, двигатель 110 может потреблять жидкое топливо (например, бензин) для выработки выходной мощности двигателя, в то время как мотор 120 может потреблять электрическую энергию для выработки выходной мощности мотора.
По существу, транспортное средство с движительной системой 100 может рассматриваться как гибридный электромобиль (ГЭМ).
Гибридный силовой агрегат 100 транспортного средства может использовать целый ряд различных рабочих режимов в зависимости от режимов эксплуатации, в которых находится движительная система транспортного средства. Некоторые из этих режимов могут позволять поддерживать двигатель 110 в отключенном состоянии (то есть, установленным в отключенное состояние), в котором прекращено сгорание топлива в двигателе. Например, при выбранных режимах эксплуатации, мотор 120 может приводить транспортное средство в движение посредством приводного колеса 130, как указано стрелкой 122, когда двигатель 110 отключен.
Во время других режимов эксплуатации, двигатель 110 могут устанавливать в отключенное состояние (как раскрыто выше), и в это время могут использовать мотор 120 для зарядки устройства 150 накопления энергии. Например, мотор 120 может принимать крутящий момент на колесе от приводного колеса 130, как указано стрелкой 122, причем мотор может преобразовывать кинетическую энергию транспортного средства в электрическую энергию для накопления в устройстве 150 накопления энергии, как указано стрелкой 124. Эту операцию могут называть рекуперативным торможением транспортного средства. Таким образом, в некоторых вариантах осуществления, мотор 120 может обеспечивать функцию генератора. Тем не менее, в других вариантах осуществления, вместо этого, генератор 160 может принимать крутящий момент на колесе от приводного колеса 130, причем генератор может преобразовывать кинетическую энергию транспортного средства в электрическую энергию для накопления в устройстве 150 накопления энергии, как указано стрелкой 162.
Во время еще одних режимов эксплуатации, двигатель 110 могут эксплуатировать при помощи сгорания топлива, получаемого из топливной системы 140, как указано стрелкой 142. Например, двигатель 110 могут задействовать для приведения транспортного средства в движение посредством приводного колеса 130, как указано стрелкой 112, в то время, когда мотор 120 отключен. Во время других режимов эксплуатации, для приведения транспортного средства в движение посредством приводного колеса 130, могут эксплуатировать как двигатель 110, так и мотор 120, как указано стрелками 112 и 122, соответственно. Конфигурацию, в которой как двигатель, так и мотор могут выборочно приводить транспортное средство в движение, могут называть движительной системой транспортного средства параллельного типа. Следует отметить, что в некоторых вариантах осуществления, мотор 120 может приводить транспортное средство в движение посредством первого комплекта приводных колес, а двигатель 110 может приводить транспортное средство в движение посредством второго комплекта приводных колес.
В других вариантах осуществления, гибридный силовой агрегат 100 может быть выполнен в виде движительной системы транспортного средства последовательного типа, в которой двигатель не приводит в движение приводные колеса напрямую. Вместо этого, двигатель 110 могут эксплуатировать для питания мотора 120, который, в свою очередь, может приводить транспортное средство в движение посредством приводного колеса 130, как указано стрелкой 122. Например, во время выбранных режимов эксплуатации, двигатель 110 может приводить в действие генератор 160, который может, в свою очередь, подавать электрическую энергию на один или несколько моторов 120, как показано стрелкой 114, или устройство 150 накопления энергии, как указано стрелкой 162. В качестве другого примера, двигатель 110 могут задействовать для приведения в действие мотора 120, который может, в свою очередь, обеспечивать функцию генератора для преобразования выходной мощности двигателя в электрическую энергию, причем электрическую энергию могут накапливать в устройстве 150 накопления энергии для последующего использования мотором.
Топливная система 140 может содержать один или более баков 144 хранения топлива для хранения топлива на борту транспортного средства. Например, топливный бак 144 может хранить одно или более жидких видов топлива, в том числе, но не ограничиваясь этим: бензин, дизельное топливо и спиртовое топливо. В некоторых примерах, топливо могут хранить на борту транспортного средства в виде смеси двух или более разных видов топлива. Например, топливный бак 144 может быть выполнен с возможностью хранить смесь бензина и этанола (например, Е10, Е85, и т.д.) или смесь бензина и метанола (например, М10, М85, и т.д.), при этом эти виды топлива или топливные смеси могут доставлять в двигатель 110, как указано стрелкой 142. Также и другие подходящие виды топлива или топливные смеси могут подавать в двигатель 110, при этом их могут сжигать в двигателе для выработки выходной мощности двигателя. Выходную мощность двигателя могут использовать для приведения транспортного средства в движение, как указано стрелкой 112, или для подзарядки устройства 150 накопления энергии через мотор 120 или генератор 160.
В некоторых вариантах осуществления, устройство 150 накопления энергии может быть выполнено с возможностью накопления электрической энергии, которую могут подавать на другие потребители электрической энергии, находящиеся на борту транспортного средства (отличные от мотора), в том числе, системы отопления и кондиционирования воздуха в салоне, запуска двигателя, фары, аудио и видеосистемы в салоне, и т.д. В качестве неограничивающего примера, устройство 150 накопления энергии может содержать одну или более аккумуляторных батарей и/или конденсаторов.
Контроллер 12 может соединяться с одним или более из двигателя 110, мотора 120, топливной системы 140, устройства 150 накопления энергии, и генератора 160. Контроллер 12 может получать сенсорную обратную связь от одного или более из двигателя 110, мотора 120, топливной системы 140, устройства 150 накопления энергии, и генератора 160. Кроме того, в соответствии с этой сенсорной обратной связью, контроллер может посылать управляющие сигналы на одно или более из двигателя 110, мотора 120, топливной системы 140, устройства 150 накопления энергии, и генератора 160. Контроллер 12 может получать указание запрошенной водителем выходной мощности движительной системы транспортного средства от водителя 102 транспортного средства. Например, контроллер может получать сенсорную обратную связь от датчика 194 положения педали, который соединен с педалью 192. Педаль 192 может схематично указывать на тормозную педаль и/или педаль акселератора. Конфигурация контроллера 12 дополнительно разъяснена на фиг. 2.
С колесом 130 могут быть соединены фрикционные тормоза 118. Сила трения может быть применена к колесу 130 за счет включения колесных тормозов 118, как указано стрелкой 117. В одном из примеров, колесные тормоза 118 могут включаться в соответствии с тем, что водитель нажимает ногой на тормозную педаль 192. В других примерах, контроллер 12 или контроллер, соединенный с контроллером 12, могут применять или включать колесные тормоза. Таким же образом, на колесах 130 может быть уменьшена сила трения за счет выключения колесных тормозов 118 в соответствии с тем, что водитель отпускает ногу от тормозной педали.
Устройство 150 накопления энергии может периодически получать электрическую энергию от источника 180 питания, находящегося вне транспортного средства (например, не являющегося частью транспортного средства) как указано стрелкой 184. В качестве неограничивающего примера, гибридный силовой агрегат 100 может быть выполнен в виде подключаемого (подзаряжаемого) гибридного электромобиля (ГЭМ), в котором электрическая энергия может подаваться в устройство 150 накопления энергии из источника 180 питания через кабель 182 передачи электрической энергии. Во время операции подзарядки устройства 150 накопления энергии от источника 180 питания, кабель 182 электрической передачи может быть электрически соединять устройство 150 накопления энергии и источник 180 питания. Когда движительную систему транспортного средства задействуют для приведения транспортного средства в движение, кабель 182 электрической передачи может быть отсоединен между источником 180 питания и устройством 150 накопления энергии. Контроллер 12 может идентифицировать и/или контролировать количество электрической энергии, хранящейся на устройстве накопления энергии, что может называться степенью заряженности (СЗ).
В других вариантах осуществления, кабель 182 электрической передачи может отсутствовать, при этом устройство 150 накопления энергии может принимать электрическую энергию беспроводным способом от источника 180 питания. Например, устройство 150 накопления энергии может принимать электрическую энергию от источника 180 питания с помощью одного или более из электромагнитной индукции, радиоволн, и электромагнитного резонанса. По существу, следует понимать, что могут использовать любой подходящий подход для подзарядки устройства 150 накопления энергии от источника питания, который не является частью транспортного средства. Таким образом, мотор 120 может приводить транспортное средство в движение, используя источник энергии, отличный от топлива, используемого двигателем 110.
Топливная система 140 может периодически принимать топливо из источника топлива, находящегося вне транспортного средства. В качестве неограничивающего примера, гибридный силовой агрегат 100 может дозаправляться путем приема топлива через топливозаправочное устройство 170, как указано стрелкой 172. В некоторых вариантах осуществления, топливный бак 144 может быть выполнен с возможностью хранения топлива, полученного от топливозаправочного устройства 170, до тех пор, пока оно не будет подано в двигатель 110 для сгорания. В некоторых вариантах осуществления, контроллер может получать индикацию количества топлива на борту, хранящегося в топливном баке 144, с помощью датчика уровня топлива. Уровень топлива, хранящегося в топливном баке 144 (например, идентифицированный датчиком уровня топлива) может сообщаться водителю транспортного средства, например, через указатель уровня топлива в баке.
В альтернативном варианте осуществления, датчик(и) 199 могут быть соединены с гибридным силовым агрегатом 100 для измерения условий транспортного средства, содержащих скорость транспортного средства и местоположение транспортного средства. Датчик 199 может быть подключен к контроллеру 12.
Контроллер 12 принимает сигналы от различных датчиков, показанных на фиг. 1, и задействует различные исполнительные механизмы, показанные на фиг. 1, для регулировки работы двигателя на основе полученных сигналов и инструкций, хранящихся в памяти контроллера. Например, регулировка крутящего момента двигателя может содержать регулировку исполнительного механизма топливной системы для регулировки количества топлива, впрыскиваемого в цилиндр двигателя. Количество топлива, впрыскиваемого в цилиндр двигателя, могут контролировать путем регулировки длительности импульса сигнала, посылаемого на топливный инжектор. Детали топливного инжектора представлены на фиг. 2. В качестве другого примера, регулировка крутящего момента электрического мотора может содержать регулировку выходных тока и напряжения устройства накопления энергии для регулировки выходного крутящего момента электрического мотора. В качестве другого примера, регулировка тормозного момента может содержать регулировку исполнительного механизма в тормозах 118 для регулировки силы трения, прикладываемой к колесу.
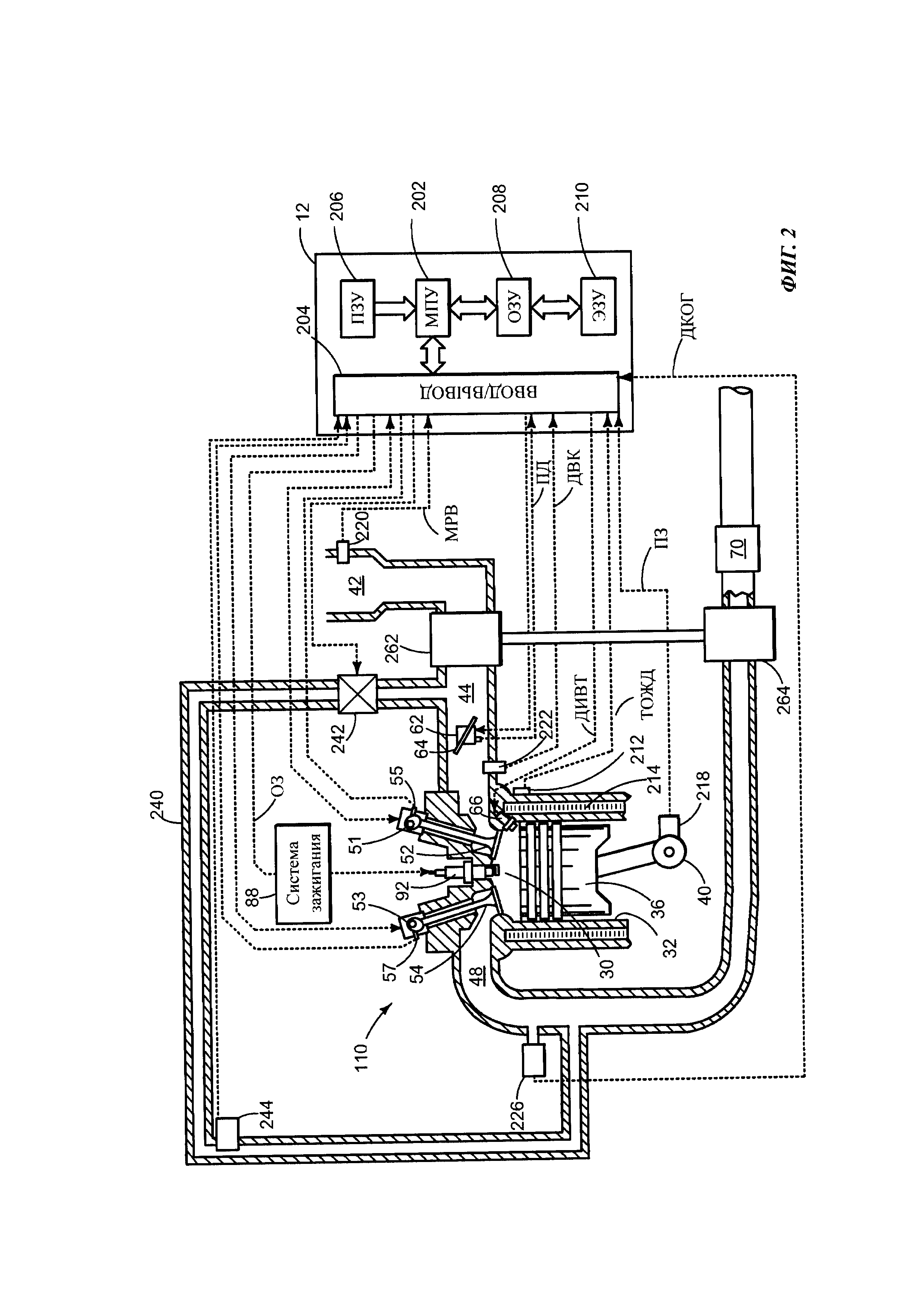
Теперь рассмотрим фиг. 2, на которой принципиальная схема изображает один из цилиндров многоцилиндрового двигателя 110. Двигателем 100 могут управлять, по меньшей мере, частично с помощью контроллера 12. Камера сгорания (то есть, цилиндр) 30 двигателя 110 может содержать стенки 32 камеры с расположенным в них поршнем 36. В некоторых вариантах осуществления, поверхность поршня может иметь чашу. Поршень 36 может быть соединен с коленчатым валом 40 таким образом, что возвратно-поступательное движение поршня переводится во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен с по меньшей мере одним приводным колесом транспортного средства (таким, как колесо 130 на фиг. 1). Кроме того, стартерный мотор может быть соединен с коленчатым валом 40 через маховик для обеспечения запуска двигателя 110.
Камера 30 сгорания может принимать впускной воздух из впускного коллектора 44 через впускной канал 42 и может выпускать возникающие при горении отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут выборочно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления, камера 30 сгорания может содержать два или более впускных клапанов и/или два или более выпускных клапанов.
Впускным клапаном 52 могут управлять с помощью контроллера посредством электропривода 51 клапана (ЭПК) (англ. EVA от "electric valve actuator"). Аналогичным образом, выпускным клапаном 54 могут управлять с помощью контроллера посредством ЭПК 53. В качестве альтернативы, регулируемый привод клапанов может быть электрогидравлическим или любым другим возможным механизмом, обеспечивающим срабатывание клапана. Во время некоторых режимов, контроллер 12 может изменять сигналы, подаваемые на приводы 51 и 53, для управления открытием и закрытием соответствующих впускных и выпускных клапанов. Положение впускного клапана 52 и выпускного клапана 54 могут определять с помощью датчиков 55 и 57 положения клапанов, соответственно.
Топливный инжектор 66 показан соединенным непосредственно с камерой 30 сгорания для прямого впрыска топлива в него пропорционально длительности импульса впрыска топлива (ДИВТ, англ. FPW от "fuel pulse width"), полученному от контроллера 12. Таким образом, топливный инжектор 66 обеспечивает так называемый прямой впрыск топлива в камеру 30 сгорания. Топливный инжектор может быть установлен в боковой части камеры сгорания или, например, в верхней части камеры сгорания. Топливо может доставляться в топливный инжектор 66 с помощью топливной системы (такой, как топливная система 140 на фиг. 1).
Система 88 зажигания может подавать искру зажигания в камеру 30 сгорания через свечу 92 зажигания в соответствии с сигналом опережения зажигания (ОЗ) от контроллера 12, при выбранных режимах работы. Несмотря на то, что показаны компоненты искрового зажигания, в некоторых вариантах осуществления, камеру 30 сгорания или одну, или более других камер сгорания двигателя 110 могут задействовать в режиме воспламенения от сжатия, как с искрой зажигания, так и без нее.
Впускной канал 42 или впускной коллектор 44 может содержать дроссель 62, имеющий дроссельную заслонку 64. В данном конкретном примере, угол поворота дроссельной заслонки 64, или открытие дросселя, может изменяться контроллером 12 с помощью сигнала, подаваемого на электрический мотор или исполнительный механизм, содержащийся в дросселе 62 - такую конфигурацию обычно называют электронной регулировкой дросселя (ЭРД, англ. ETC от "electronic throttle control"). Таким образом, дроссель 62 может работать для изменения впуска воздуха, подаваемого в камеру 30 сгорания, среди других цилиндров двигателя. Угол поворота дроссельной заслонки 64 может предоставляться контроллеру 12 с помощью сигнала положения дросселя ПД.
Впускной канал 42 может содержать датчик 220 массового расхода воздуха и датчик 222 давления воздуха в коллекторе для подачи соответствующих сигналов МРВ и ДВК на контроллер 12.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (РОГ) может направлять требуемую части отработавших газов из выпускного канала 48 во впускной коллектор 44. В этом примере, показан канал 240 РОГ высокого давления (ВД). Количество газов РОГ, поступающее во впускной коллектор 44, может изменяться с помощью контроллера 12 через клапан 241 РОГ ВД. Дополнительно, датчик 244 РОГ может быть расположен внутри канала 240 РОГ ВД и может предоставлять индикацию одного или более из давления, температуры, и концентрации отработавших газов.
Как таковой, двигатель 110 может дополнительно содержать устройство сжатия, такое как турбонагнетатель или механический нагнетатель, содержащий, по меньшей мере, компрессор 262, расположенный вдоль впускного коллектора 44. Для турбонагнетателя, компрессор 262 может быть, по меньшей мере, частично приведен в движение турбиной 264 (например, через вал), помещенной вдоль выпускного канала 48. Для механического нагнетателя, компрессор 262 может быть, по меньшей мере, частично приведен в движение двигателем 110 и/или электрической машиной, и может не содержать турбины. Таким образом, величина сжатия, подаваемого на один или более цилиндров двигателя через турбонагнетатель или механический нагнетатель, может изменяться контроллером 12.
Датчик 226 кислорода в отработавших газах показан соединенным с выпускным каналом 48 выше по потоку от устройства 70 контроля выбросов. Датчик 226 может быть любым подходящим датчиком для обеспечения индикации воздушно-топливного отношения в отработавших газах. Устройство 70 контроля выбросов может содержать трехкомпонентный каталитический нейтрализатор и сажевый фильтр.
Контроллер 12 показан на фиг. 2 в виде микрокомпьютера, содержащего микропроцессорное устройство 202 (МПУ), входной/выходной порты 204, электронный носитель информации (например, машиночитаемый) для исполняемых программ и калибровочных значений, показанный в виде постоянного запоминающего устройства 206 (ПЗУ) в данном конкретном примере, оперативное запоминающее устройство 208 (ОЗУ), энергонезависимое запоминающее устройство 210 (ЭЗУ), и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от связанных с двигателем 110 датчиков, среди которых можно назвать: показание массового расхода засосанного воздуха (МРВ) от датчика 220 массового расхода воздуха, показание температуры охлаждающей жидкости двигателя (ТОЖД) от датчика 212 температуры, соединенного с рубашкой 214 охлаждения; сигнал профиля зажигания (ПЗ) от датчика 218 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом, соединенного с коленчатым валом 40; положения дросселя (ПД), или, открытие дросселя, от датчика положения дросселя; и сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 222. Частота вращения двигателя, ЧВД, может генерироваться контроллером 12 по сигналу ПЗ. Сигнал ДВК от датчика ДВК можно использовать для обеспечения индикации разряжения или давления во впускном коллекторе. Следует отметить, что могут быть использованы различные комбинации вышеуказанных датчиков, например, датчик МРВ без датчика ДВК, или наоборот. При стехиометрической работе, датчик ДВК может предоставлять индикацию крутящего момента двигателя. Кроме того, этот датчик, наряду с измеренной частотой вращения двигателя, может обеспечить оценку заряда (содержащего воздух), засасываемого в цилиндр. В одном из примеров, датчик 218, который также используется в качестве датчика частоты вращения двигателя, может выдавать заданное число равномерно распределенных импульсов на каждый оборот коленчатого вала.
Постоянное запоминающее устройство 106 на носителе информации может быть запрограммировано машиночитаемыми данными, представляющими инструкции, исполняемые микропроцессором 202 для осуществления раскрытых настоящем документе способов, а также других предполагаемых, но конкретно не перечисленных вариантов.
Как раскрыто выше, на фиг. 2 показан только один цилиндр многоцилиндрового двигателя, и каждый цилиндр может аналогичным образом содержать свой собственный набор впускных/выпускных клапанов, топливный инжектор, свечу зажигания, и т.д.
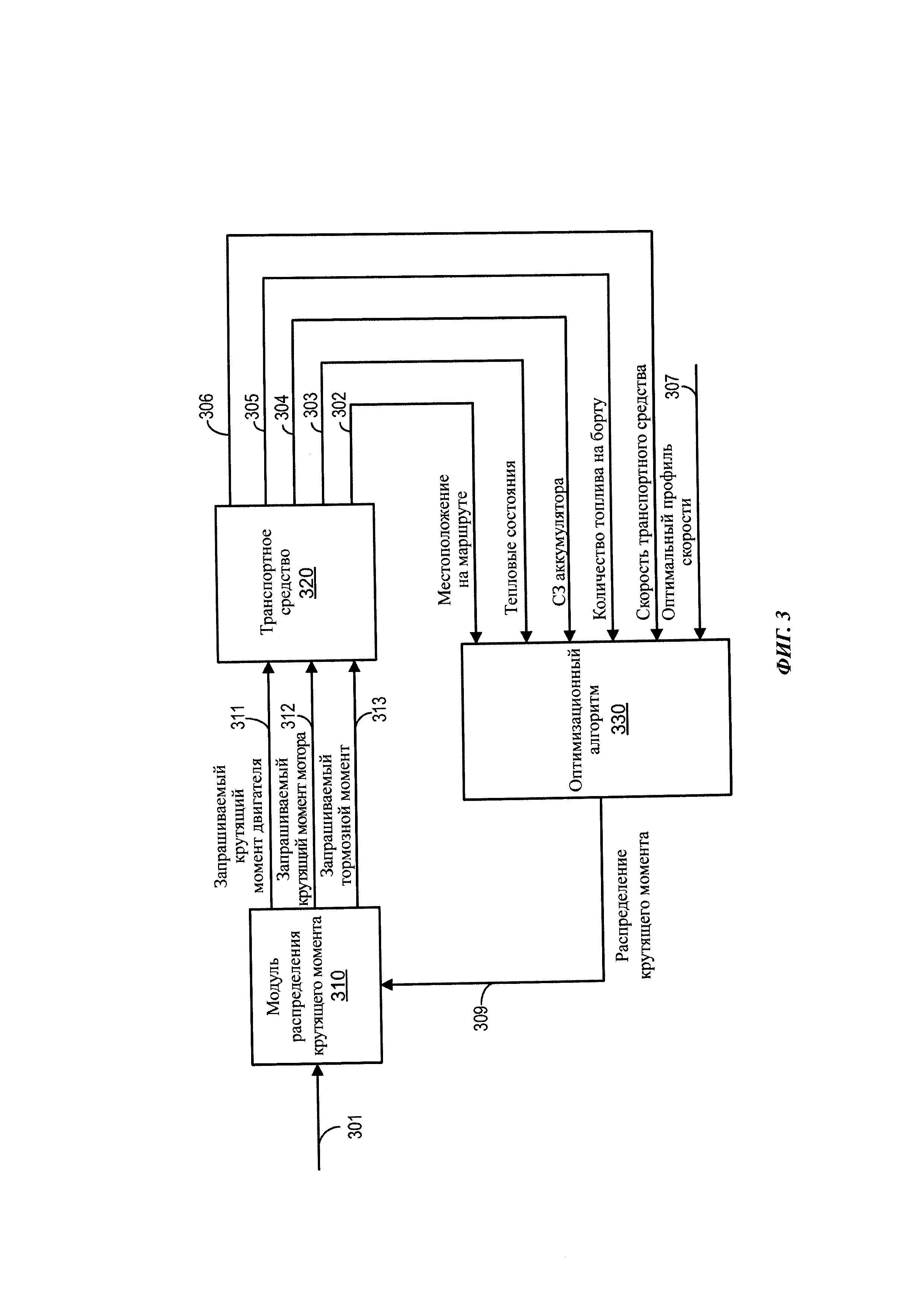
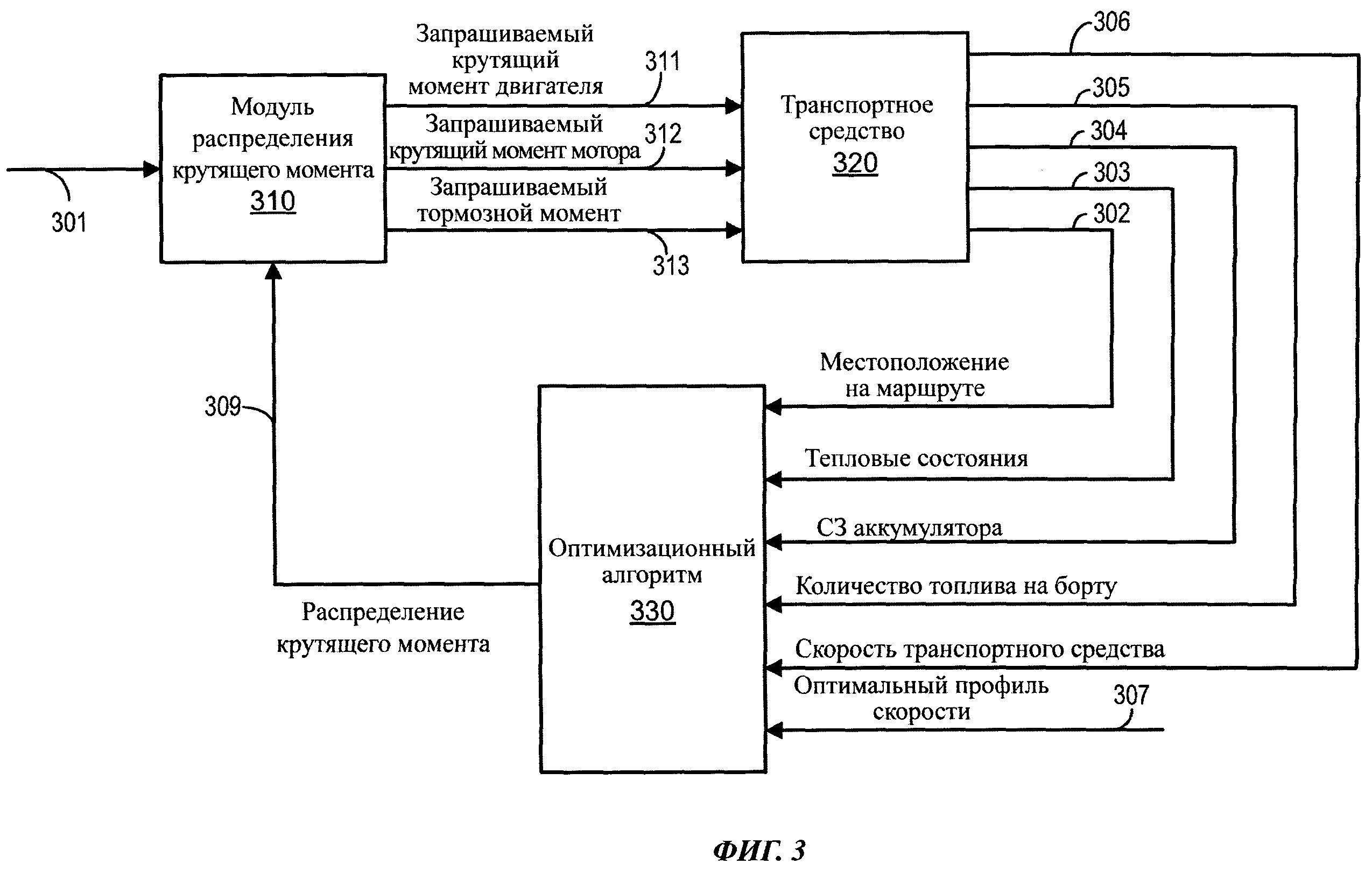
На фиг. 3 показана блок-схема для оптимизации распределения крутящего момента. Запрашиваемый водителем крутящий момент был изменен выходом оптимизационного алгоритма с целью уменьшения времени гонки. Транспортным средством управляют с помощью измененного запрашиваемого водителем крутящего момента. Эксплуатационные параметры транспортного средства, в данном документе также обозначаемые маршрутными данными, записывают и используют для оптимизации распределения крутящего момента.
Запрашиваемый водителем крутящий момент 301 посылают на модуль 310 распределения крутящего момента. Модуль распределения крутящего момента изменяет запрашиваемый водителем крутящий момент 301 на основе распределения 309 крутящего момента, полученного от оптимизационного алгоритма 330. В одном из вариантов осуществления, запрос водителя является полным выходным крутящим моментом для приведения транспортного средства в движение. Запрашиваемый водителем крутящий момент может быть математической функцией нажатия педали акселератора. Например, запрашиваемый водителем крутящий момент 301 может быть пропорциональным степени нажатия педали акселератора, измеренной датчиком положения педали (таким как датчик 194 положения педали на фиг.1). Модуль 310 распределения крутящего момента может распределять запрашиваемый водителем крутящий момент между двигателем и электрическим мотором на основе распределения 309 крутящего момента. Распределение крутящего момента может содержать уровень крутящего момента двигателя и уровень крутящего момента электрического мотора. Уровни крутящего момента находятся в пределах от нуля до единицы. Сумма уровней распределения крутящего момента равна единице. Например, уровень крутящего момента двигателя может быть 70%, а уровень крутящего момента электрического мотора может быть 30%. Модуль распределения крутящего момента может вычислять запрашиваемый крутящий момент 311 двигателя путем умножения запрашиваемого водителем крутящего момента 301 на уровень крутящего момента двигателя, и вычислять запрашиваемый крутящий момент 312 мотора путем умножения запрашиваемого водителем крутящего момента 301 на уровень крутящего момента электрического мотора.
В другом варианте осуществления, запрашиваемый водителем крутящий момент 301 может содержать полный запрашиваемый крутящий момент для приведения транспортного средства в движение и базовое распределение крутящего момента. Базовое распределение крутящего момента могут определять на основе справочных таблиц, относящихся к текущему состоянию транспортного средства. Когда требуется оптимизация, модуль распределения крутящего момента может изменять базовое распределение крутящего момента на основе распределения 309 крутящего момента, полученного от оптимизационного алгоритма 330.
В еще одном варианте осуществления, запрашиваемый водителем крутящий момент 301 может содержать полный запрашиваемый крутящий момент для приведения транспортного средства в движение и запрашиваемый водителем тормозной момент. Запрашиваемый водителем тормозной момент может быть отрицательным. Запрашиваемый водителем тормозной момент может быть математической функцией нажатия тормозной педали. В одном примере, в случаях, когда вызывает интерес задержка срабатывания, модуль 310 распределения крутящего момента может непосредственно передавать запрашиваемый водителем тормозной момент на фрикционный тормоз транспортного средства 320 (такой, как тормоза 118 на фиг. 1) без изменения. В другом примере, модуль 310 распределения крутящего момента может выбирать отрицательный запрашиваемый водителем тормозной момент между рекуперативным торможением, торможением двигателем, и/или фрикционным торможением (313) на основе распределения 309 крутящего момента.
Транспортное средство 320 могут эксплуатировать на основе запрашиваемого крутящего момента 311 двигателя, запрашиваемого крутящего момента 312 мотора, и запрашиваемого тормозного момента 313. В качестве примера, могут определять такие параметры, как количество топлива, количество заряда воздуха, момент зажигания, на основе запрашиваемого крутящего момента 311 двигателя для вывода требуемого крутящего момента двигателя. Выходные ток и напряжение устройства накопления энергии могут определять на основе запрашиваемого крутящего момента 311 мотора, так что электрический мотор может генерировать требуемый крутящий момент мотора. Силу трения, действующую на колесо транспортного средства, могут определять на основе запрашиваемого тормозного момента. Во время работы транспортного средства, параметры транспортного средства (также называемые маршрутными данными), такие как текущая скорость 302 транспортного средства, количество 303 топлива на борту, степень 304 заряженности аккумулятора, тепловые состояния 305 транспортного средства, и местоположение транспортного средства на маршруте, измеряют и передают по обратной связи в оптимизационный алгоритм 330. Тепловые состояния 305 транспортного средства могут содержать температуру двигателя, температуру электрического мотора, и температуру фрикционного тормоза. Местоположение транспортного средства на маршруте может быть трехмерным. Тепловые состояния транспортного средства могут измерять или оценивать с помощью соответствующих датчиков температуры, содержащихся в гибридном силовом агрегате.
Оптимизационный алгоритм 330 определяет оптимальные уровни распределения крутящего момента на основе маршрутных данных, измеренных/оцененных в системе 320 транспортного средства. Оптимизационный алгоритм может также принимать ожидаемую скорость в местоположении транспортного средства в качестве входа для определения распределения мощности между двигателем и электрическим мотором. В качестве примера, оптимизационный алгоритм может j искать уровни распределения крутящего момента, которые могут минимизировать функцию затрат. В одном из вариантов осуществления, функция затрат может быть построена с целью достижения ожидаемой скорости в месте расположения на маршруте. В другом варианте осуществления, функция затрат может быть построена с целью достижения минимального маршрутного времени. Уровни распределения крутящего момента могут ограничивать тепловыми ограничениями, такими как ограничения по температуре двигателя, температуре электрического мотора, и температуре фрикционного тормоза. Детали оптимизационного алгоритма раскрыты в описании к фиг. 4.
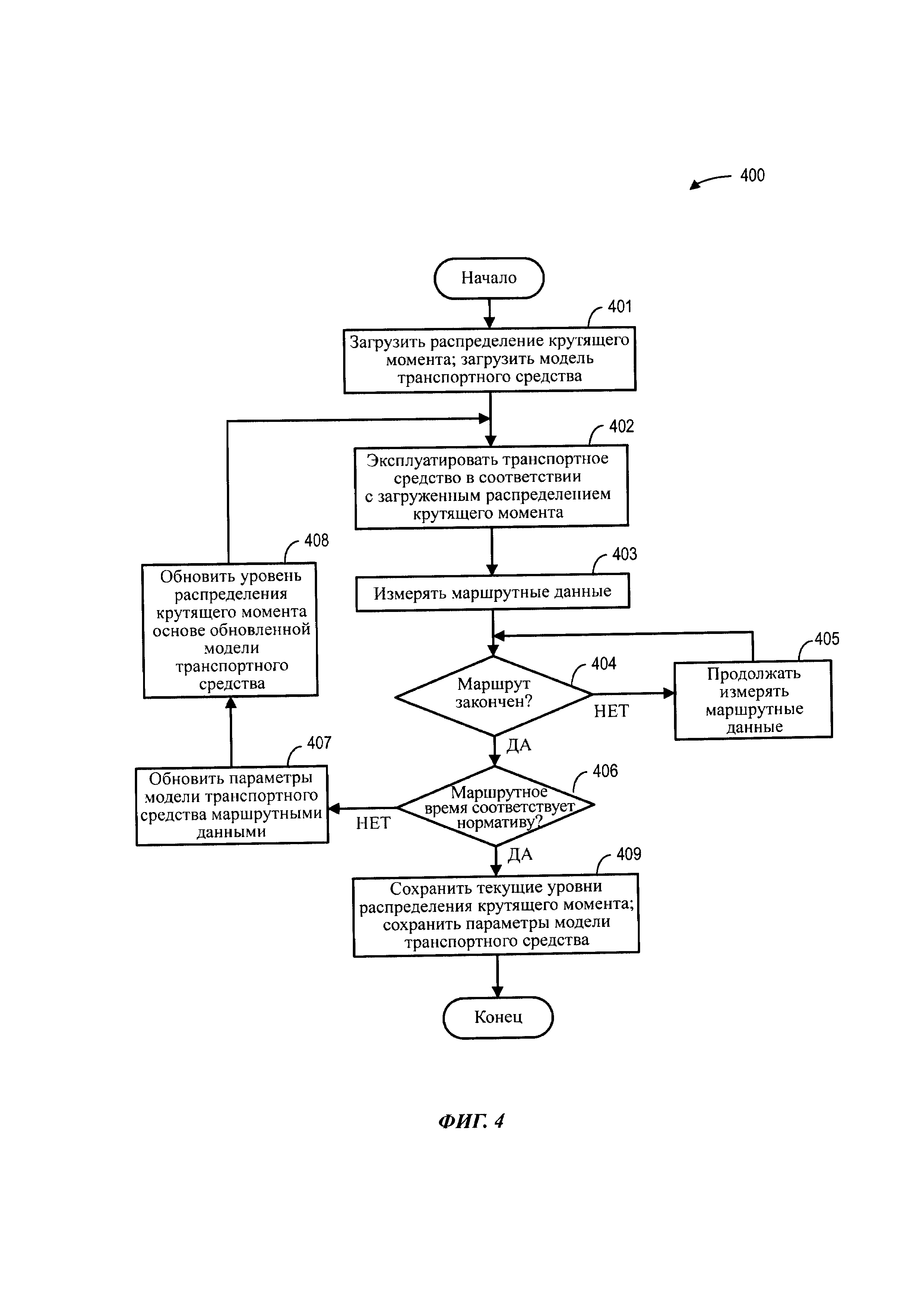
На фиг. 4 показан способ 400 для управления крутящим моментом в гибридном силовом агрегате, таким как гибридный силовой агрегат 100 на фиг. 1. Инструкции для выполнения способа 400 и остальных приведенных здесь способов могут выполняться контроллером на основе инструкций, хранящихся в памяти контроллера, и в сочетании с сигналами, полученными от датчиков системы двигателя, таких как датчики, раскрытые выше со ссылками на фигуры 1-2. Контроллер может использовать исполнительные механизмы системы двигателя для регулировки работы двигателя в соответствии со способами, раскрытыми ниже.
На шаге 401, контроллер загружает распределение крутящего момента маршрута гонки, хранящийся в памяти контроллера. В качестве примера, водитель транспортного средства может ввести идентификационный номер маршрута гонки, и контроллер ищет загружает соответствующий распределение крутящего момента из памяти. Сохраненным распределением крутящего момента могут быть заданные уровни, сохраненные в памяти, или результаты предыдущей оптимизации. Распределение крутящего момента может содержать процентный уровень крутящего момента двигателя и электрической машины, такой как электрический мотор.
Контроллер может также загружать модель транспортного средства. Например, модель транспортного средства может быть математической функцией, связывающей ускорение транспортного средства и требуемый крутящий момент 5 для двигателя, электрической машины и тормозов. Модель транспортного средства может быть представлена в виде:

где d - местоположение транспортного средства на маршруте, и местоположение транспортного средства может быть трехмерным; a(d) - ускорение транспортного средства; V(d) - скорость транспортного средства; MV(d) - масса транспортного средства; Те - крутящий момент электрической машины, и отрицательный Те означает рекуперативное торможение; TICE - крутящий момент двигателя; а TB - тормозной момент, обеспечиваемый фрикционными блоками. Масса транспортного средства может быть функцией количества топлива на борту:

где FQTY(d) - количество топлива на борту, остающееся в транспортном средстве. Количество топлива на борту может быть функцией крутящего момента двигателя TICE:

Крутящий момент двигателя TICE может быть функцией запрашиваемого крутящего момента двигателя u1(d) (например, запрашиваемого крутящего момента 311 двигателя на фиг. 3):

где G1(s) - передаточная функция, a s означает преобразование Лапласа. Передаточная функция может моделировать запаздывание двигателя, в том числе запаздывание турбонагнетателя и задержки исполнительных механизмов двигателя. Крутящий момент мотора Те может быть функцией запрашиваемого крутящего момента электрического мотора u2(d) (например, запрашиваемого крутящего момента 312 электрического мотора на фиг. 3):

где G2(s) - передаточная функция от запрашиваемого крутящего момента электрического мотора u2(d) к фактическому выходному крутящему моменту мотора Те. Передаточная функция G2(s) может учитывать задержку переключения источника питания мотора между устройством накопления энергии и генератором. Передаточная функция G2(s) также может учитывать задержку ответа электрического мотора, например, задержку от получения запрашиваемого момента электрического мотора до выдачи требуемого крутящего момента мотора. Обеспечиваемый тормозной системой тормозной момент TB может равняться запрашиваемому тормозному моменту (например, запрашиваемому тормозному моменту 313 на фиг. 3), или запрашиваемому водителем тормозному моменту:

При загрузке модели транспортного средства, загружают параметры функций ƒ1()-ƒ3() и передаточных функций G1(s) - G2(s). Таким образом, контроллер может рассчитать ускорение транспортного средства в некотором местоположении на основе входов, содержащих запрашиваемый крутящий момент двигателя, запрашиваемый крутящий момент электрического мотора, запрашиваемый тормозной момент, и скорость транспортного средства.
На шаге 402, транспортное средство эксплуатируют на основе загруженного распределения крутящего момента. Например, модуль распределения крутящего момента (например, модуль 310 распределения крутящего момента на фиг. 3) рассчитывает запрашиваемый крутящий момент двигателя, запрашиваемый крутящий момент электрического мотора, и запрашиваемый тормозной момент на основе запроса водителя и загруженных на шаге 401 уровней распределения крутящего момента. В качестве примера, запрашиваемый крутящий момент двигателя рассчитывают путем умножения запрашиваемого водителем движительного крутящего момента на уровень крутящего момента двигателя; запрашиваемый крутящий момент электрического мотора рассчитывают путем умножения запрашиваемого водителем движительного крутящего момента на уровень крутящего момента электрического мотора; запрашиваемый тормозной момент равен запрашиваемому водителем тормозному моменту. Запрашиваемый водителем движительный крутящий момент могут определять путем сверки степени нажатия педали акселератора со справочной таблицей.
На шаге 403, в способе 400 измеряют маршрутные данные при эксплуатации транспортного средства на маршруте гонки. Маршрутные данные измеряют или оценивают в каждом местоположении по маршруту. Маршрутные данные могут содержать скорость транспортного средства V, количество топлива на борту FQTY, ускорение транспортного средства α, крутящий момент двигателя TICE, крутящий момент электрического мотора TE и тормозной момент TB. Например, в способе 400 могут измерять частоту вращения двигателя и нагрузку двигателя, и оценивать выходной крутящий момент двигателя путем умножения измеренной частоты вращения двигателя на измеренную нагрузку двигателя. В способе 400 могут измерять частоту вращения и нагрузку электрического мотора, и оценивать фактический выходной крутящий момент электрического мотора путем умножения измеренной частоты вращения электрического мотора на измеренную нагрузку электрического мотора. В способе 400 могут измерять тормозной момент, и рассчитывать тормозной момент как функцию от тормозного усилия. В качестве альтернативы, одно или более из крутящего момента двигателя, крутящего момента электрического мотора, и тормозного момента могут измерять непосредственно с помощью динамометра. Маршрутные данные могут дополнительно содержать тепловые состояния, в том числе температуру двигателя, температуру электрического мотора, и температуру торможения. Например, температуру двигателя могут оценивать на основе температуры охлаждающей жидкости, измеренной датчиком, соединенным с системой охлаждения (таким как датчик 212 температуры на фиг. 2). Температуру электрического мотора и температуру торможения могут измерять датчиком температуры, соединенным с мотором и тормозами, соответственно.
На шаге 404, в способе 400 определяют, закончен ли маршрут гонки. Если транспортное средство не закончило маршрут гонки, в способе 400 продолжают измерять/оценивать маршрутные данные на шаге 405. Если транспортное средство заканчивает маршрут гонки, в способе 400 переходят к шагу 406.
На шаге 406, в способе 400 определяют, соответствует ли нормативу маршрутное время. Если маршрутное время соответствует нормативу, в способе 400 сохраняют текущие уровни распределения крутящего момента и текущую модель транспортного средства в памяти на шаге 409. Например, могут сохранять в памяти параметры текущей модели транспортного средства. Если маршрутное время превышает норматив, в способе 400 переходят к шагу 407.
На шаге 407, модель транспортного средства обновляют на основе маршрутных данных, полученных на шаге 403. В одном из вариантов осуществления, параметры модели транспортного средства могут обновлять на основе маршрутных данных. Эти параметры модели транспортного средства могут включать коэффициенты и форматы функций ƒ1() - ƒ3() и передаточных функций G1(s) - G2(s). Параметры функций могут определять на основе измеренных или оцененных входов и выходов. Например, параметры передаточной функции G1 могут обновлять на основе измеренных или оцененных запрашиваемого крутящего момента двигателя u1 и крутящего момента двигателя TICE на шаге 403. В качестве другого примера, параметры функции ƒ3() могут обновлять на основе измеренных или оцененных количества топлива на борту FQTY и крутящего момента двигателя TICE на шаге 403. В другом варианте осуществления, параметры модели транспортного средства могут определять на основе маршрутных данных через идентификацию системы.
Кроме того, могут обновлять или идентифицировать параметры тепловых уравнений. Термические уравнения могут использовать для расчета температуры двигателя, температуры электрического мотора и температуры тормоза. Тепловое уравнение температуры двигателя может быть функцией от скорости транспортного средства и крутящего момента двигателя:

Тепловое уравнение температуры электрического мотора может быть функцией от скорости транспортного средства, крутящего момента электрического мотора, и степени заряженности аккумулятора:

Тепловое уравнение температуры тормоза может быть функцией от скорости транспортного средства и тормозного момента:

На шаге 408, оптимальные уровни распределения крутящего момента определяют на основе обновленной модели транспортного средства через оптимизацию. В одном из вариантов осуществления, если известен оптимальный профиль скорости, запрашиваемый крутящий момент двигателя запрашиваемый крутящий момент электрического мотора u2(d), и запрашиваемый тормозной момент u3(d) могут оптимизировать так, чтобы профиль скорости транспортного средства приближался к оптимальному профилю транспортного средства. Задача оптимизации может быть выражена как первая функция затрат:

при этом:








где Vr - оптимальный профиль скорости. Крутящий момент мотора Те ограничен максимальным и минимальным текущими крутящими моментами электрического мотора Temax и Temin, причем как максимальный, так и минимальный текущие крутящие моменты электрического мотора Temax и Temin являются функциями от скорости транспортного средства и степени заряженности аккумулятора. Крутящий момент двигателя ограничен максимальным достижимым крутящим моментом двигателя TICEmax, который является функцией от скорости транспортного средства V(d) и количества топлива на борту Fqty(d). Тормозной момент может быть ограничен располагаемым крутящим моментом от фрикционного тормоза TBmin, который является функцией от скорости транспортного средства.
В другом варианте осуществления, если неизвестен оптимальный профиль скорости, запрашиваемый крутящий момент двигателя u1(d), запрашиваемый крутящий момент электрического мотора u2(d), и запрашиваемый тормозной момент u3(d) могут оптимизировать так, чтобы минимизировать среднюю скорость транспортного средства на маршруте. Задача оптимизации может быть выражена как вторая функция затрат:

при этом:







где Vavg - средняя скорость.
Задача оптимизации может быть решена с помощью нескольких доступных способов. Например, если функция затрат является выпуклой, могут использовать способы на основе градиентов. Если функция затрат является невыпуклой, могут использовать генетические и эвристические алгоритмы.
Распределение крутящего момента могут рассчитывать на основе оптимизированного запрашиваемого крутящего момента двигателя u1' и оптимизированного запрашиваемого крутящего момента мотора u2':
Уровень крутящего момента двигателя 
Уровень крутящего момента мотора  Уравнение 12
Уравнение 12
Затем в способе 400 могут эксплуатировать транспортное средство, выбирая крутящий момент на основе этой оптимизации.
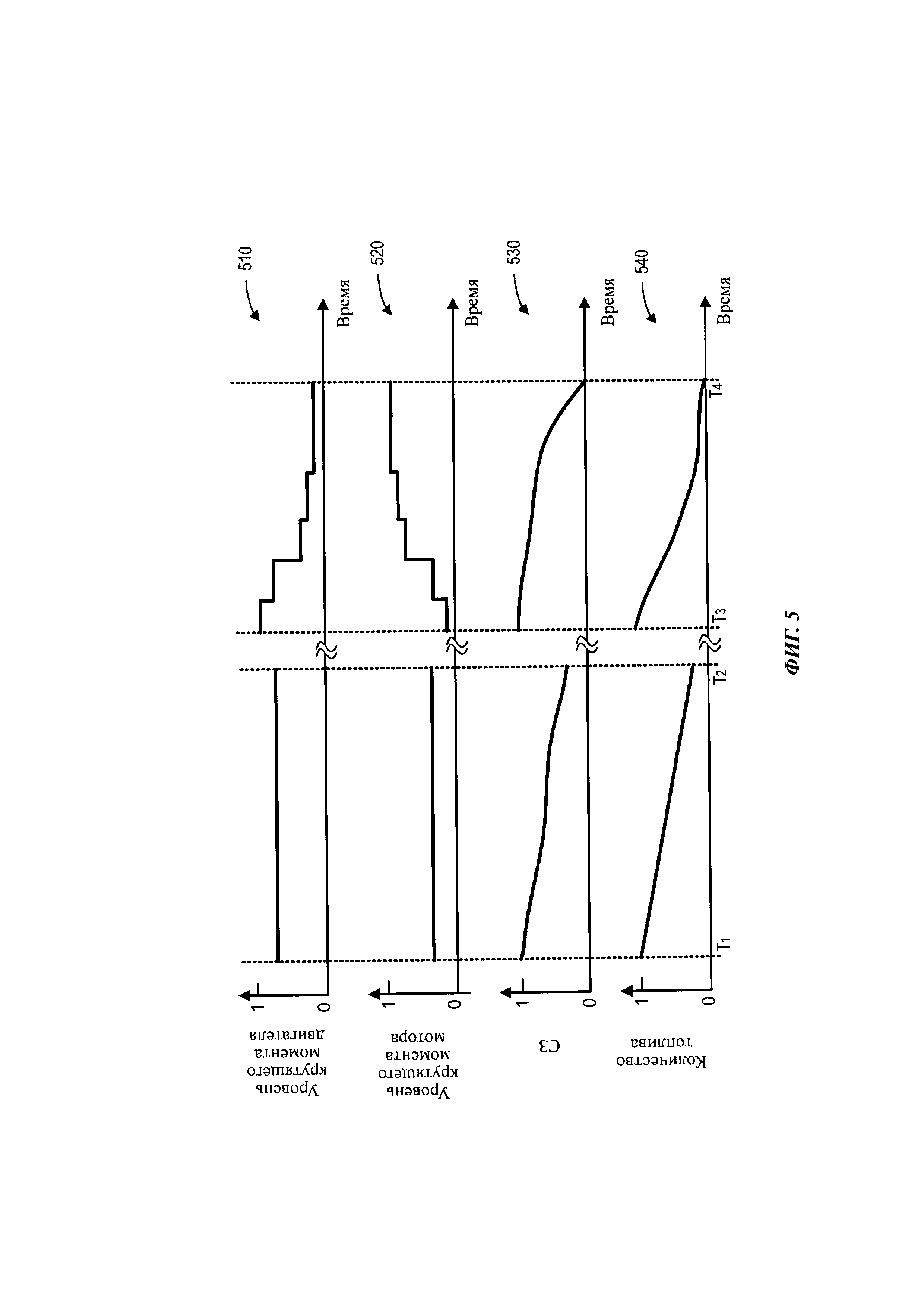
На фиг. 5 изображены временные графики уровня 510 крутящего момента двигателя, уровня 520 электрического мотора, уровня 530 заряженности аккумулятора, и количества 540 топлива на борту при осуществлении способа 400. Оси х - это время. Увеличение времени указано стрелками.
В момент времени T1, транспортное средство начинает гонку по заданному маршруту. Контроллер может загружать сохраненные уровень крутящего момента двигателя и уровень крутящего момента мотора в каждом местоположении на маршруте. В этом случае, уровни распределения крутящего момента являются постоянными на протяжении всей гонки. Таким образом, от момента времени T1 и до того, как транспортное средство не закончит гонку в момент Т2, уровень крутящего момента двигателя останется таким же, и уровень крутящего момента мотора остается таким же. Степень заряженности аккумулятора и количество топлива на борту продолжают уменьшаться от T1 до Т2. Контролируют и записывают маршрутные данные, содержащие скорость транспортного средства, выходной крутящий момент двигателя, выходной крутящий момент электрического мотора, и количество топлива на борту.
В момент времени Т2, транспортное средство заканчивает гонку с ненулевой степенью заряженности аккумулятора и ненулевым количеством топлива на борту. Контроллер сравнивает время гонки от Т1 до Т2, и определяет, что для улучшения времени гонки, необходима оптимизация распределения крутящего момента. Таким образом, на основе маршрутных данных обновляют модель транспортного средства, и на основе обновленной модели транспортного средства оптимизируют распределение крутящего момента.
В момент времени Т3, транспортное средство начинает вторую гонку на том же маршруте. Транспортное средство эксплуатируют на основе оптимизированного распределения крутящего момента. От момента времени Т3, и до того, как транспортное средство не закончит вторую гонку в момент Т4, уровень крутящего момента двигателя уменьшается, а уровень крутящего момента мотора увеличивается. Скорость изменения степени заряженности аккумулятора сначала медленная, а затем увеличивается в конце гонки. Скорость изменения количества топлива на борту в начале второй гонки высока из-за высокого уровня крутящего момента двигателя. Скорость изменения количества топлива на борту затем снижается при приближении к концу гонки. Как степень заряженности аккумулятора, так и количество топлива на борту равны нулю в конце гонки, в момент времени Т4. По сравнению с первой гонкой, бортовое топливо истощается быстрее, так что вес транспортного средства уменьшается быстрее, и увеличивается общая мощность на единицу веса в гонке.
В момент времени Т4, контроллер определяет, что маршрутное время для второй гонки удовлетворяет требованиям. Уровни распределения крутящего момента и модель транспортного средства сохраняют в памяти контроллера.
Таким образом, уровни распределения крутящего момента между двигателем и электрическим мотором на заданном маршруте обновляют с помощью процесса оптимизации на основе модели транспортного средства. Модель транспортного средства обновляют на основе фактических маршрутных данных после каждого прохождения на маршруте. Модель транспортного средства является функцией от количества топлива на борту транспортного средства.
Технический эффект от обновления модели транспортного средства заключается в том, что могут учитывать изменения в транспортном средстве и условиях гонки. Технический эффект от оптимизации уровней распределения крутящего момента после каждой гонки заключается в том, что уровень распределения крутящего момента могут регулировать в каждом местоположении на маршруте для эффективного использования бортового запаса топлива и энергии, хранящейся в устройстве накопления энергии. Технический эффект от построения модели транспортного средства на основе количества топлива на борту транспортного средства заключается в том, что оптимизационный алгоритм помогает достичь максимальной усредненной мощности на единицу веса. Технический эффект от рассмотрения тепловых состояний транспортного средства при оптимизации заключается в том, что могут быть учтены тепловые эффекты на силовой электронике.
В варианте осуществления способа, эксплуатируют гибридный силовой агрегат для подачи крутящего момента на колеса транспортного средства на протяжении заданного маршрута; и распределяют крутящий момент между двигателем и электрической машиной на основе массы транспортного средства. В первом примере способа, в способе дополнительно определяют массу транспортного средства на основе количества топлива на борту во время эксплуатации гибридного силового агрегата. Второй пример способа опционально содержит первый пример, и в нем дополнительно определяют распределение крутящего момента между двигателем и электрической машиной на основе модели транспортного средства. Третий пример способа опционально содержит один или более из первого и второго примеров, и в нем дополнительно измеряют выходной крутящий момент двигателя и выходной крутящий момент электрической машины при эксплуатации гибридного силового агрегата, и идентифицируют модель транспортного средства на основе измеренного выходного крутящего момента двигателя, измеренного выходного крутящего момента электрической машины, и массы транспортного средства. Четвертый пример способа опционально содержит один или более из примеров с первого по третий, и в нем дополнительно модель транспортного средства идентифицируют дополнительно на основе измеренной скорости транспортного средства, измеренного количества топлива на борту, и измеренной степени заряженности аккумулятора. Пятый пример способа опционально содержит один или более из примеров с первого по четвертый, и в нем дополнительно определяют распределение крутящего момента путем минимизации разности между оптимальным профилем скорости и профилем скорости, рассчитанным на основе идентифицированной модели транспортного средства. Шестой пример способа опционально содержит один или более из примеров с первого по пятый, и в нем дополнительно определяют распределение крутящего момента путем максимизации усредненной скорости транспортного средства, рассчитанной на основе идентифицированной модели транспортного средства. Седьмой пример способа опционально содержит один или более из примеров с первого по шестой, и в нем дополнительно выбирают крутящий момент таким образом, чтобы количество топлива на борту было нулевым в конце маршрута. Восьмой пример способа опционально содержит один или более из примеров с первого по седьмой, и в нем дополнительно выбирают крутящий момент таким образом, чтобы степень заряженности аккумулятора была нулевой в конце маршрута.
В другом варианте осуществления способа, эксплуатируют транспортное средство с распределением крутящего момента между двигателем и электрической машиной на протяжении заданного маршрута; измеряют количество топлива на борту; и обновляют распределение крутящего момента на основе измеренного количества топлива на борту для максимизации усредненной мощности на единицу веса на протяжении заданного маршрута. В первом примере способа, в способе дополнительно обновляют распределение крутящего момента на основе модели транспортного средства, и обновляют параметры модели транспортного средства на основе измеренного количества топлива на борту. Второй пример способа опционально содержит первый пример, и в нем дополнительно измеряют маршрутные данные во время эксплуатации транспортного средства, и обновляют параметры модели транспортного средства на основе измеренных маршрутных данных. Третий пример способа опционально содержит один или более из первого и второго примеров, и в нем дополнительно маршрутные данные содержат крутящий момент двигателя, крутящий момент электрической машины, тормозной момент, скорость транспортного средства и степень заряженности аккумулятора. Четвертый пример способа опционально содержит один или более из примеров с первого по третий, и в нем дополнительно обновляют распределение крутящего момента таким образом, чтобы профиль транспортного средства, рассчитанный на основе обновленного распределения крутящего момента приближался к оптимальному профилю скорости транспортного средства. Пятый пример способа опционально содержит один или более из примеров с первого по четвертый, и в нем дополнительно обновляют распределение крутящего момента таким образом, чтобы средняя скорость транспортного средства, рассчитанная на основе обновленного распределения крутящего момента, была максимальной. Шестой пример способа опционально содержит один или более из примеров с первого по пятый, и в нем дополнительно обновляют распределение крутящего момента таким образом, чтобы количество топлива на борту было равно первому пороговому значению, а степень заряженности аккумулятора была равна второму пороговому значению в конце заданного маршрута.
В еще одном варианте осуществления, представлено гибридное транспортное средство, содержащее: колесо, двигатель, соединенный с колесом; электрическую машину, соединенную с колесом; тормоз, соединенный с колесом; и контроллер, выполненный с машиночитаемыми инструкциями, хранящимися в долговременной памяти, для: загрузки распределения крутящего момента для маршрута; эксплуатации транспортного средства на данном маршруте путем распределения запрашиваемого крутящего момента между двигателем и электрической машиной на основе загруженного распределения крутящего момента; измерения количества топлива на борту при эксплуатации транспортного средства; оптимизации распределения крутящего момента на основе количества топлива на борту в конце маршрута; и сохранения оптимизированного распределения крутящего момента. В первом примере способа, в способе дополнительно конфигурируют контроллер для оптимизации распределения крутящего момента на основе модели транспортного средства. Второй пример способа опционально содержит первый пример, и в нем дополнительно конфигурируют контроллер для обновления модели транспортного средства на основе измеренного количества топлива на борту. Третий пример способа опционально содержит один или более из первого и второго примеров, и в нем дополнительно конфигурируют контроллер для эксплуатации транспортного средства на маршруте с тормозным моментом, равным запрашиваемому водителем тормозному моменту.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и выполняться системой управления, содержащей контроллер в сочетании с различными датчиками, исполнительными механизмами, и другим оборудованием двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, где указанные действия выполняются путем исполнения инструкций в системе, содержащей различные компоненты оборудования двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на "один" элемент или "первый" элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.
Способ управления двигателем в состоянии простоя, способ управления транспортным средством, включающим двигатель, и система транспортного средства
Способ управления работой двигателя (варианты) и система двигателя
Способ диагностики двигателя, имеющего клапан для управления разбавлением впускаемого воздуха (варианты)
Способ (варианты) и система для регулировки воздушно-топливного отношения
Двигатель внутреннего сгорания с наддувом и способ эксплуатации такого двигателя
Способ управления двигателем (варианты) и система двигателя
Способ эксплуатации двигателя (варианты) и система двигателя
Способ управления двигателем в ответ на преждевременное воспламенение (варианты)
Способ управления нагревательным устройством датчика твердых частиц (варианты), система и способ регенерации датчика твердых частиц
Двигатель внутреннего сгорания с жидкостным охлаждением и способ его эсксплуатации
Транспортное средство и способ измерения дорожного просвета для транспортного средства

