Результат интеллектуальной деятельности: Следящий привод
Вид РИД
Изобретение
Изобретение относится к области автоматического регулирования, а конкретно к приводам наведения и стабилизации инерционных объектов, например, приводам наведения артиллерийского вооружения подвижных объектов.
Известны следящие приводы дистанционного управления различными объектами [Следящие приводы, под редакцией доктора технических наук, профессора Б.К. Чемоданова, том 2, М., Издательство МГТУ им. Н.Э. Баумана, 2003 г., стр. 13, 14, 19, 24], в которых в качестве корректирующей обратной связи используется сигнал, пропорциональный скорости объекта регулирования. При наличии в структуре данных приводов нелинейностей (люфтов и упругих деформаций в механической передаче) и существенных моментов инерции объекта регулирования появляются проблемы с энергетическим обеспечением работы приводов в моменты смены знака управляющих воздействий.
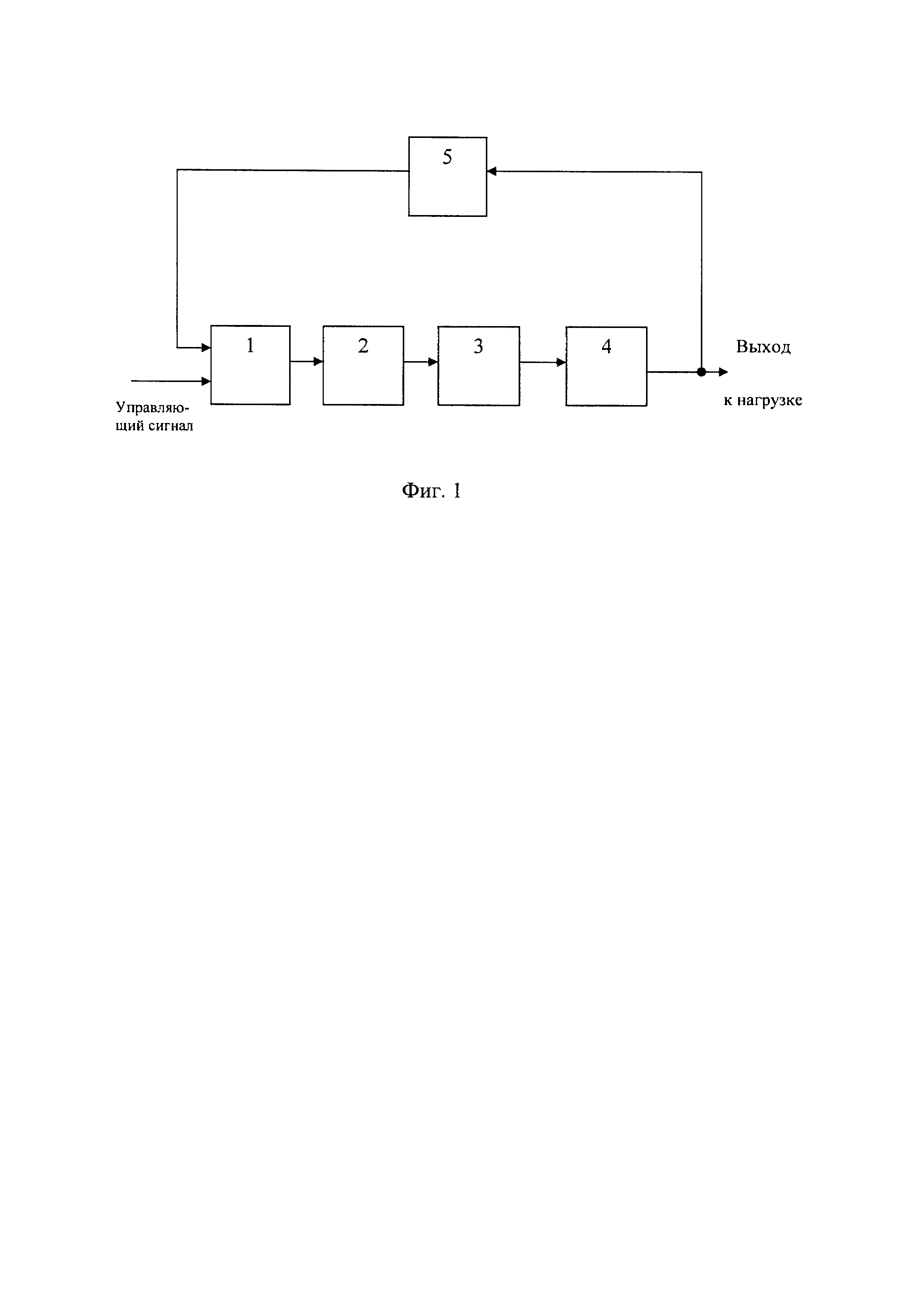
Известен следящий привод, реализованный в изделии БОС [Блок одноосной стабилизации АЮИЖ. 461324.007 РЭ, АО «ВНИИ «Сигнал», г. Ковров, 2008 г.] (принятый за прототип), предназначенный для стабилизации указателя истинного горизонта, используемого в системе обеспечения посадки вертолета на палубу корабля. Этот следящий привод содержит (фиг. 1) последовательно соединенные формирователь сигнала рассогласования 1, пропорциональный регулятор 2, выходной сумматор 3, исполнительный привод 4 и датчик углового положения нагрузки 5, выход которого соединен с первым входом формирователя сигнала рассогласования 1. На второй вход формирователя сигнала рассогласования 1 поступает управляющий сигнал. Выход исполнительного привода 4 является выходом следящего привода, на котором устанавливается инерционная нагрузка.
К недостатку данного следящего привода относятся проблемы с обеспечением надежности работы следящего привода в моменты смены знака возмущающих воздействий (например, при отработке задания режима управления, обеспечивающего смену направления движения, т.е. в момент реверса движения) при наличии существенного люфта в механической передаче от исполнительного привода 4 до датчика углового положения нагрузки 5. В момент смены направления движения нагрузки (реверса движения) управляющий сигнал меняет свой знак на первом входе формирователя сигнала рассогласования 1, а сигнал с выхода датчика углового положения нагрузки 5 на втором входе формирователя сигнала рассогласования 1 начнет менять знак только после того, как выберется люфт в механической передаче. В этот момент резко возрастает сигнал рассогласования на выходе формирователя сигнала рассогласования 1 и соответственно на выходах пропорционального регулятора 2 и выходного сумматора 3, а значит, и на входе исполнительного привода 4. В момент реверса движения скорость исполнительного привода 4 меняет свой знак, то есть проходит через нулевое значение. В момент наличия максимального входного сигнала и нулевой скорости исполнительного привода 4 резко возрастает ток потребления исполнительного привода 4, который может превысить допустимые значения для силовой части исполнительного привода 4, что приведет к выходу ее из строя.
Целью предлагаемого технического решения является повышение одной из основных технических характеристик, а именно надежности следящего привода в режиме реверса движения.
Указанная цель достигается тем, что в следящий привод, содержащий последовательно соединенные формирователь сигнала рассогласования, пропорциональный регулятор, выходной сумматор, исполнительный привод и датчик углового положения нагрузки, выход которого соединен с первым входом формирователя сигнала рассогласования, на второй вход которого поступает управляющий сигнал, а выход исполнительного привода является выходом следящего привода, на котором установлена инерционная нагрузка, введены первый коммутатор, соединенный с выходом выходного сумматора и входом исполнительного привода, а также последовательно соединенные дифференциатор, блок выделения модуля, первый компаратор, второй коммутатор, интегратор и второй компаратор, выход которого соединен с управляющим входом второго коммутатора, выход которого дополнительно соединен с управляющим входом первого коммутатора, а вход дифференциатора соединен с управляющим сигналом.
Материалы заявки поясняются фигурами, где представлены:
на фиг. 1 - блок-схема следящего привода, принятого за прототип;
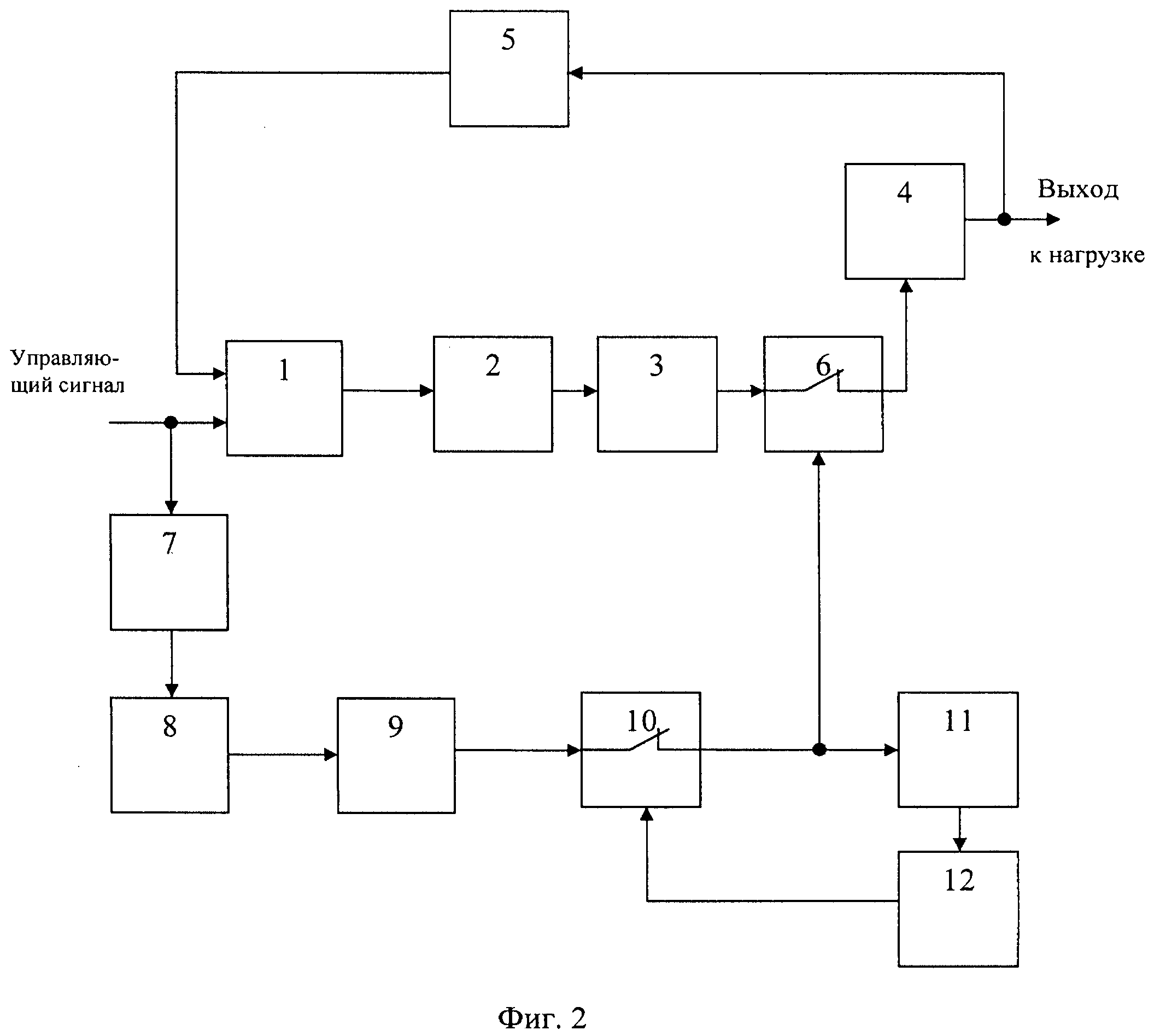
на фиг. 2 - блок-схема предлагаемого следящего привода.
Предлагаемый следящий привод (фиг. 2) состоит из последовательно соединенных формирователя сигнала рассогласования 1, пропорционального регулятора 2, выходного сумматора 3, исполнительного привода 4 и датчика углового положения нагрузки 5. Выход датчика углового положения нагрузки 5 соединен с первым входом формирователя сигнала рассогласования 1, на второй вход которого поступает управляющий сигнал. Выход исполнительного привода 4 является выходом следящего привода, на котором установлена инерционная нагрузка. В следящий привод введены первый коммутатор 6, соединенный с выходом выходного сумматора 3 и входом исполнительного привода 4, а также последовательно соединенные дифференциатор 7, блок выделения модуля 8, первый компаратор 9, второй коммутатор 10, интегратор 11 и второй компаратор 12, выход которого соединен с управляющим входом второго коммутатора 10. Выход второго коммутатора 10 дополнительно соединен с управляющим входом первого коммутатора 6. Вход дифференциатора 7 соединен с управляющим сигналом.
Принцип действия предлагаемого следящего привода заключается в том, что для повышения надежности следящего привода в условиях работы в режиме реверса движения в него введены устройства, которые обеспечивают отключение управляющего сигнала (на время порядка 0,1 с) на входе исполнительного привода 4 после смены знака управляющего сигнала на входе формирователя сигнала рассогласования 1 и вследствие этого, резкого возрастания сигнала рассогласования на выходе формирователя сигнала рассогласования 1.
Предлагаемый следящий привод работает следующим образом. Управляющий сигнал поступает одновременно на вход формирователя сигнала рассогласования 1 и вход дифференциатора 7. На выходе дифференциатора 7 формируется сигнал, пропорциональный скорости изменения управляющего сигнала, который через блок выделения модуля 8 поступает на вход первого компаратора 9. При превышении скорости изменения управляющего сигнала допустимого значения на выходе первого компаратора 9 появляется сигнал, который через замкнутый контакт второго коммутатора 10 поступает на управляющий вход первого коммутатора 6. По этому сигналу коммутатор 6 отключает управляющий сигнал от входа исполнительного привода 4 и тем самым снижает потребление тока исполнительным приводом. Одновременно сигнал с выхода второго коммутатора 10 поступает на вход интегратора 11, с выхода которого сигнал поступает на вход второго компаратора 12. Порог срабатывания второго компаратора 12 определяет заданную выдержку времени, через которую появляется сигнал на выходе второго компаратора 12. После истечения заданной выдержки времени появляется сигнал на управляющем входе второго коммутатора 10, который отключает сигнал на его выходе, а значит, и на управляющем входе первого коммутатора 6 и входе интегратора 11. После этого подключается выход выходного сумматора 3 к входу исполнительного привода 4 и следящий привод работает в нормальном режиме.
Таким образом, отключение сигнала управления на входе исполнительного привода 4 в момент резкого изменения управляющего воздействия на заданную выдержку времени исключает возможность увеличения тока потребления исполнительного привода 4 до величин, превышающих допустимые значения для силовой части исполнительного привода 4, тем самым повышая надежность следящего привода.
Предлагаемое техническое решение проверено математическим моделированием, а также экспериментальной проверкой макетного образца привода. Результаты проверок подтвердили возможность снижения до допустимых величин тока потребления исполнительного привода в условиях работы в режиме реверса движения. По результатам экспериментальных исследований предлагаемое техническое решение рекомендовано к использованию в документации следящего привода модернизированного изделия БОС.
Следящий привод, содержащий последовательно соединенные формирователь сигнала рассогласования, пропорциональный регулятор, выходной сумматор, исполнительный привод и датчик углового положения нагрузки, выход которого соединен с первым входом формирователя сигнала рассогласования, на второй вход которого поступает управляющий сигнал, а выход исполнительного привода является выходом следящего привода, отличающийся тем, что в него введены первый коммутатор, вход которого соединен с выходом выходного сумматора, а выход - с входом исполнительного привода, а также последовательно соединенные дифференциатор, блок выделения модуля, первый компаратор, второй коммутатор, интегратор и второй компаратор, выход которого соединен с управляющим входом второго коммутатора, причем выход второго коммутатора дополнительно соединен с управляющим входом первого коммутатора, а вход дифференциатора соединен с управляющим сигналом.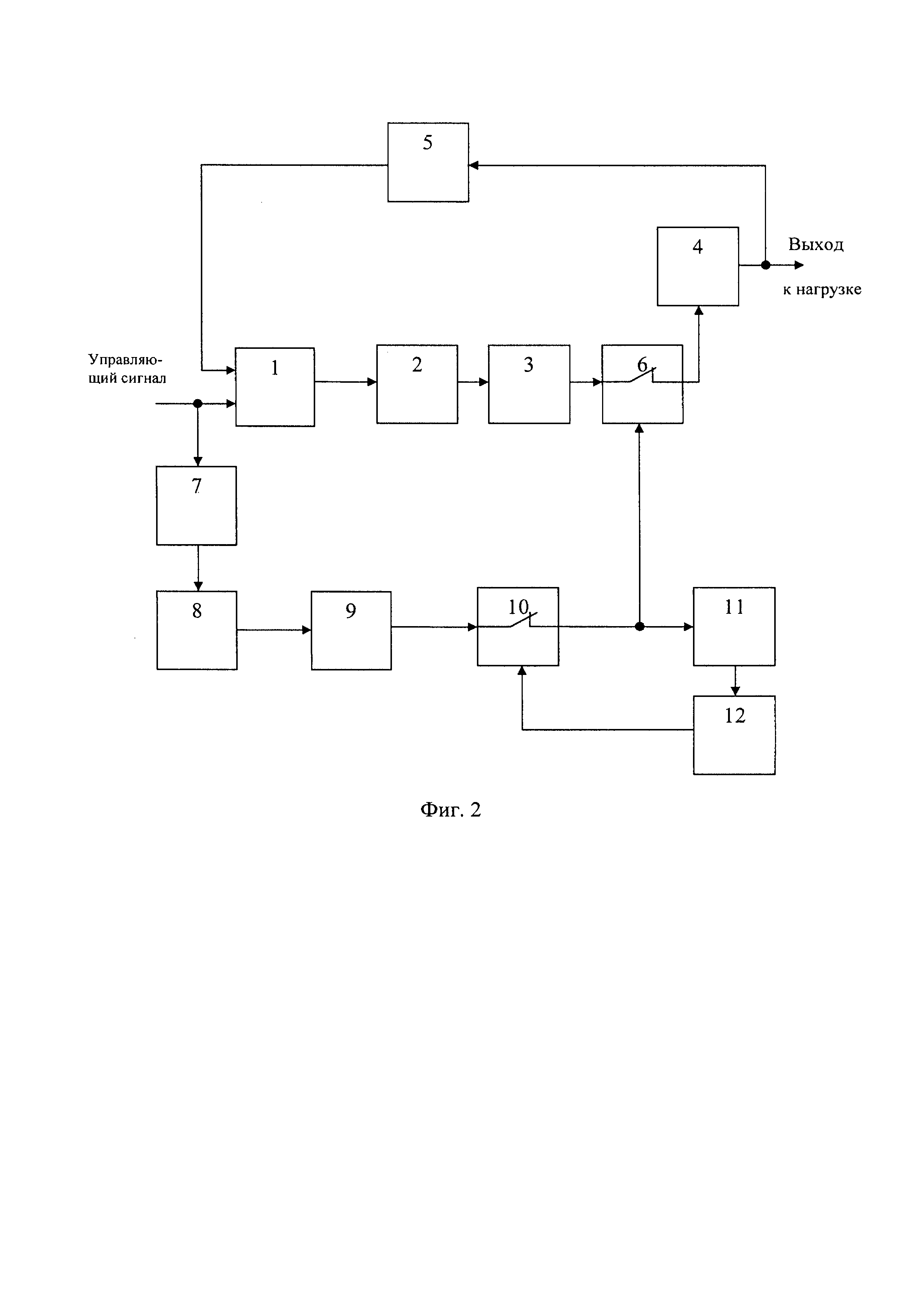
Аппаратура наземной навигации
Электрогидравлическая система управления
Комбинированное уплотнение
Усилитель мощности
Электрогидравлический привод
Реактивная машина
Электромеханический преобразователь для электропривода вертикального перемещения регулирующего органа
Электрогидравлический привод
Электрогидравлическая система управления
Ретрактор тканей для эндоскопической увеличивающей маммопластики
Усилитель мощности
Синхронная машина
Система управления наведением инерционного объекта

