Результат интеллектуальной деятельности: МНОГОРЕЖИМНЫЙ РАДИОЧАСТОТНЫЙ ДАТЧИК
Вид РИД
Изобретение
Область техники
[0001] Настоящее раскрытие относится к радиочастотным датчикам и, более конкретно, к радиочастотным датчикам, которые могут устанавливаться на подвижную платформу для обеспечения возможности одновременной реализации подвижной платформой по меньшей мере двух функций, например, функции навигации и функции обнаружения объектов, таких как, например, препятствия, люди и т.д.
Уровень техники
[0002] В наши дни датчики широко используются для реализации навигации в различных подвижных платформах, таких как роботы, транспортные средства и тому подобное. Конкретным примером подвижной платформы является робот–уборщик. Разные датчики имеют разные ограничения, которые увеличивают вероятность потери ориентации в пространстве и усложняют конструкцию конечного изделия, а также схему взаимодействия между компонентами этого конечного изделия. Для решения этих технических проблем в данной заявке предложен единый многорежимный радиочастотный (РЧ) датчик, который может устанавливаться на подвижную платформу для обеспечения возможности одновременной реализации подвижной платформой по меньшей мере двух функций, например, функции навигации и функции обнаружения объектов.
[0003] Публикация заявки на патент США № US 2018/0098676 A1 (дата публикации: 12.04.2018) на имя Samsung Electronics Co. Ltd., озаглавленная «CLEANING ROBOT AND METHOD OF CONTROLLING THE SAME» раскрывает робота–уборщика и способ управления им, и более конкретно, робота–уборщика, стыкуемого со станцией на основе радиочастотного (РЧ) сигнала. В раскрытом в данной публикации роботе–уборщике, как и в настоящем раскрытии, содержится вращающаяся часть (антенна), которая выполнена с возможностью приема РЧ сигнала, передаваемого от станции. Затем, перемещением данного робота–уборщика можно управлять на основе индикаторного значения интенсивности принятого сигнала, извлекаемого из РЧ сигнала, к станции для стыковки. Тем не менее, решение по указанной публикации заявки на патент США не раскрывает использования вращающейся антенны для обеспечения возможности одновременной реализации вращающейся антенной, установленной на подвижной платформе, по меньшей мере двух функций, например, функции навигации и функции обнаружения объектов. Очевидно, что раскрытое в публикации США решение могло бы быть дополнено дополнительной антенной, но специалисту должно быть понятно, что такое дополнение неизбежно приведет к усложнению конструкции конечного изделия, а также к усложнению схемы взаимодействия между компонентами этого конечного изделия.
[0004] По мнению авторов настоящего изобретения ближайшим аналогом для многорежимного РЧ датчика, который предложен в настоящей заявке, является радарная система, раскрытая в патентном документе CN104316925 (A) (дата публикации: 28.01.2015) на имя WUHAN UNIVERSITY, озаглавленном «AZIMUTH SYNTHETIC APERTURE RADAR SYSTEM BASED ON ROTATABLE ANTENNAS». Указанная радарная система использует несколько отдельных и вращающихся антенн, но не раскрывает многорежимного РЧ датчика, как в настоящей заявке, который обладает единой антенной структурой и выполнен с возможностью одновременной реализации подвижной платформой, на которой он установлен, по меньшей мере двух функций, например, функции навигации и функции обнаружения объектов. В силу вышеупомянутого, специалисту должно быть понятно, что для технического решения из указанного патентного документа CN характерна усложненная конструкция конечного изделия, а также усложненная схема взаимодействия между компонентами этого конечного изделия. Кроме того, техническое решение из указанного патентного документа CN не поддерживает многорежимность в рамках единой антенной конструкции, т.е. это решение не приспособлено для обеспечения возможности одновременной реализации подвижной платформой по меньшей мере двух функций с помощью единой антенной конструкции.
[0005] Многорежимный РЧ датчик, раскрытый в данной заявке, создавался для решения по меньшей мере некоторых вышеуказанных технических проблем в уровне техники. Таким образом, предложенный многорежимный РЧ датчик позволяет упростить конструкцию конечного изделия, упростить схему взаимодействия между компонентами этого конечного изделия, обеспечить многорежимность с помощью единого РЧ радара, содержащегося в предложенном многорежимном радиочастотном датчике. Другие благоприятные эффекты и преимущества, связанные с предложенным многорежимным РЧ датчиком и вышеуказанными техническими результатами настоящего изобретения, будут понятны специалистам в данной области после ознакомления с нижеследующим подробным описанием.
Сущность изобретения
[0006] В первом аспекте настоящего изобретения предложен многорежимный радиочастотный (РЧ) датчик 100, устанавливаемый на подвижную платформу 200 для реализации подвижной платформой 200 одновременно по меньшей мере двух функций в пространстве 20. Данный многорежимный РЧ датчик 100 включает в себя: неподвижное основание 110, которое устанавливается на подвижную платформу 200, способную перемещаться в пространстве 20, и вращающуюся часть 120, которая установлена на неподвижном основании 110 и выполнена с возможность вращения относительно неподвижного основания 110 в горизонтальной плоскости. На вращающейся части 120 установлен РЧ радар 130, который включает в себя: по меньшей мере один передающий канал 132, включающий в себя одну или более передающих антенн 132.1 с первой апертурой и одну или более передающих антенн 132.2 со второй апертурой; по меньшей мере один приемный канал 134, включающий в себя одну или более приемных антенн 134.1 с первой апертурой и одну или более приемных антенн 134.2 со второй апертурой. Данный многорежимный РЧ датчик 100 также включает в себя устройство 140 контроля и обработки, выполненное с возможностью управления режимами работы многорежимного РЧ датчика 100, при этом управление включает в себя побуждение многорежимного РЧ датчика 100 к работе РЧ радара 130 в определенные моменты времени через антенны 132.1, 134.1 с первой апертурой, а в другие определенные моменты времени через антенны 132.2, 134.2 со второй апертурой. Данное устройство 140 контроля и обработки дополнительно выполнено с возможностью отправки данных, воспринимаемых РЧ радаром 130 на процессор (не проиллюстрирован на фигурах) подвижной платформы для обеспечения возможности управления подвижной платформой 200 на основе упомянутых данных с реализацией подвижной платформой 200 одновременно по меньшей мере двух функций, например, функций навигации и обнаружения объектов, в пространстве 20.
[0007] В многорежимном РЧ датчике 100 согласно первому аспекту управление режимами работы многорежимного РЧ датчика 100 включает в себя: переключение режима работы РЧ радара 130 на первый режим работы, включающий в себя излучение, в первой области наблюдения многорежимного РЧ датчика 100, множества РЧ сигналов посредством одной или более передающих антенн 132.1 с первой апертурой и прием первого множества отраженных РЧ сигналов посредством одной или более приемных антенн 134.1 с первой апертурой, переключение режима работы РЧ радара 130 на второй режим работы, включающий в себя излучение, во второй области наблюдения многорежимного РЧ датчика 100, множества РЧ сигналов посредством одной или более передающих антенн 132.2 со второй апертурой и прием второго множества отраженных РЧ сигналов посредством одной или более приемных антенн 134.2 со второй апертурой, получение синтезированной апертуры, охватывающей как первую область наблюдения, так и вторую область наблюдения многорежимного РЧ датчика 100, на основе первого множества отраженных РЧ сигналов для обеспечения возможности реализации подвижной платформой 200 первой функции, например, функции навигации, и обнаружение объектов во второй области наблюдения многорежимного РЧ датчика 100 на основе второго множества отраженных РЧ сигналов для обеспечения возможности реализации подвижной платформой 200 второй функции, например, функции обнаружения объектов.
[0008] В многорежимном РЧ датчике 100, согласно первому аспекту, первая апертура больше второй апертуры и первая область наблюдения больше второй области наблюдения.
[0009] В многорежимном РЧ датчике 100, согласно первому аспекту, первая область наблюдения и вторая область наблюдения многорежимного РЧ датчика 100 в совокупности охватывают 360–градусную область наблюдения вокруг подвижной платформы 200.
[0010] В многорежимном РЧ датчике 100 согласно первому аспекту устройство 140 контроля и обработки дополнительно выполнено с возможностью определения положения вращающейся части 120 относительно неподвижного основания 110 и определения моментов времени работы РЧ радара 130 через антенны 132.1, 134.1 с первой апертурой и моментов времени работы РЧ радара 130 через антенны 132.2, 134.2 со второй апертурой.
[0011] В многорежимном РЧ датчике 100 согласно первому аспекту, моменты времени работы РЧ радара 130 через антенны 132.1, 134.1 с первой апертурой соответствуют первой области наблюдения, а моменты времени работы РЧ радара 130 через антенны 132.2, 134.2 со второй апертурой соответствуют второй области наблюдения.
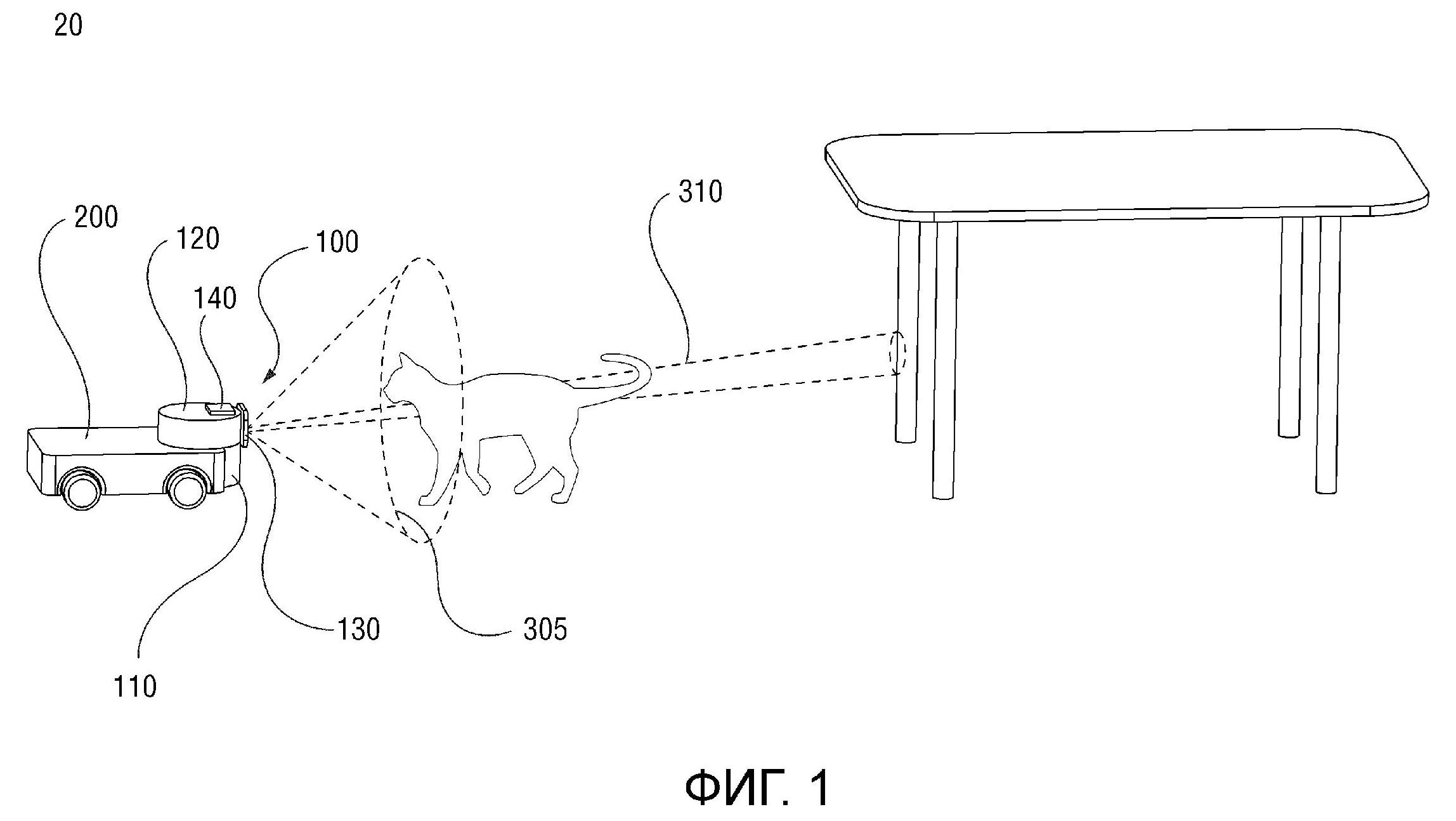
[0012] Многорежимный РЧ датчик 100 согласно первому аспекту дополнительно включает в себя фотодиод 150 (см. фигуру 3), установленный на вращающей части 120 в предопределенном положении и обращенный на неподвижное основание 110, на которое нанесена структура, указывающая первую область наблюдения и вторую область наблюдения многорежимного РЧ датчика 100. Упомянутый фотодиод 150 выполнен с возможностью: обнаружения при вращении вращающейся части 120 особенности структуры, указывающей переход многорежимного РЧ датчика 100 из одной упомянутой области в другую, и выдачи сигнала на основе результата обнаружения, который используется для определения упомянутых моментов времени.
[0013] Многорежимный РЧ датчик 100 согласно первому аспекту дополнительно содержит шаговый электродвигатель 160 (см. фигуру 2), связанный с вращающейся частью 120 и откалиброванный на основе предопределенной первой области наблюдения и второй области наблюдения многорежимного РЧ датчика 100, при этом шаговый электродвигатель 160 выполнен с возможностью обнаружения перехода многорежимного РЧ датчика 100 из одной упомянутой области в другую, и выдачи сигнала на основе результата обнаружения, который используется для определения упомянутых моментов времени.
[0014] В многорежимном РЧ датчике 100, согласно первому аспекту, устройство 140 контроля и обработки интегрировано с РЧ радаром 130 как система на кристалле (СнК), система в корпусе (СвК), программируемая логическая интегральная схема (FPGA), интегральная схема специального назначения (ASIC).
[0015] В многорежимном РЧ датчике 100 согласно первому аспекту получение синтезированной апертуры, охватывающей как первую область наблюдения, так и вторую область наблюдения многорежимного РЧ датчика 100, на основе первого множества отраженных РЧ сигналов содержит обработку первого множества отраженных РЧ сигналов с использованием Быстрого преобразования Фурье (БПФ).
[0016] В многорежимном РЧ датчике 100 согласно первому аспекту РЧ радар 130 включает в себя по меньшей мере один РЧ ключ 132.3 по меньшей мере одного передающего канала 132 и по меньшей мере один РЧ ключ 134.3 по меньшей мере одного приемного канала 134, при этом по меньшей мере один РЧ ключ 132.3 по меньшей мере одного передающего канала 132 выполнен с возможностью переключения между одной или более передающих антенн 132.1 с первой апертурой и одной или более передающих антенн 132.2 со второй апертурой на основании определенного момента времени переключения режима работы РЧ радара 130, и по меньшей мере один РЧ ключ 134.3 по меньшей мере одного приемного канала 134 выполнен с возможностью переключения между одной или более приемных антенн 134.1 с первой апертурой и одной или более приемных антенн 134.2 со второй апертурой на основании определенного момента времени переключения режима работы РЧ радара 130.
[0017] Подвижной платформой 200, на которую устанавливается многорежимный РЧ датчик 100 согласно первому аспекту, является одно из робота–пылесоса, мультикоптера, транспортного средства, в котором многорежимный РЧ датчик является частью системы помощи водителю (ADAS), очищающего/увлажняющего воздух робота, робота контроля жизнедеятельности.
[0018] Другие варианты осуществления, возможные объекты, аспекты, признаки и компоненты предложенного технического решения описаны ниже в подробном описании.
Краткое описание чертежей
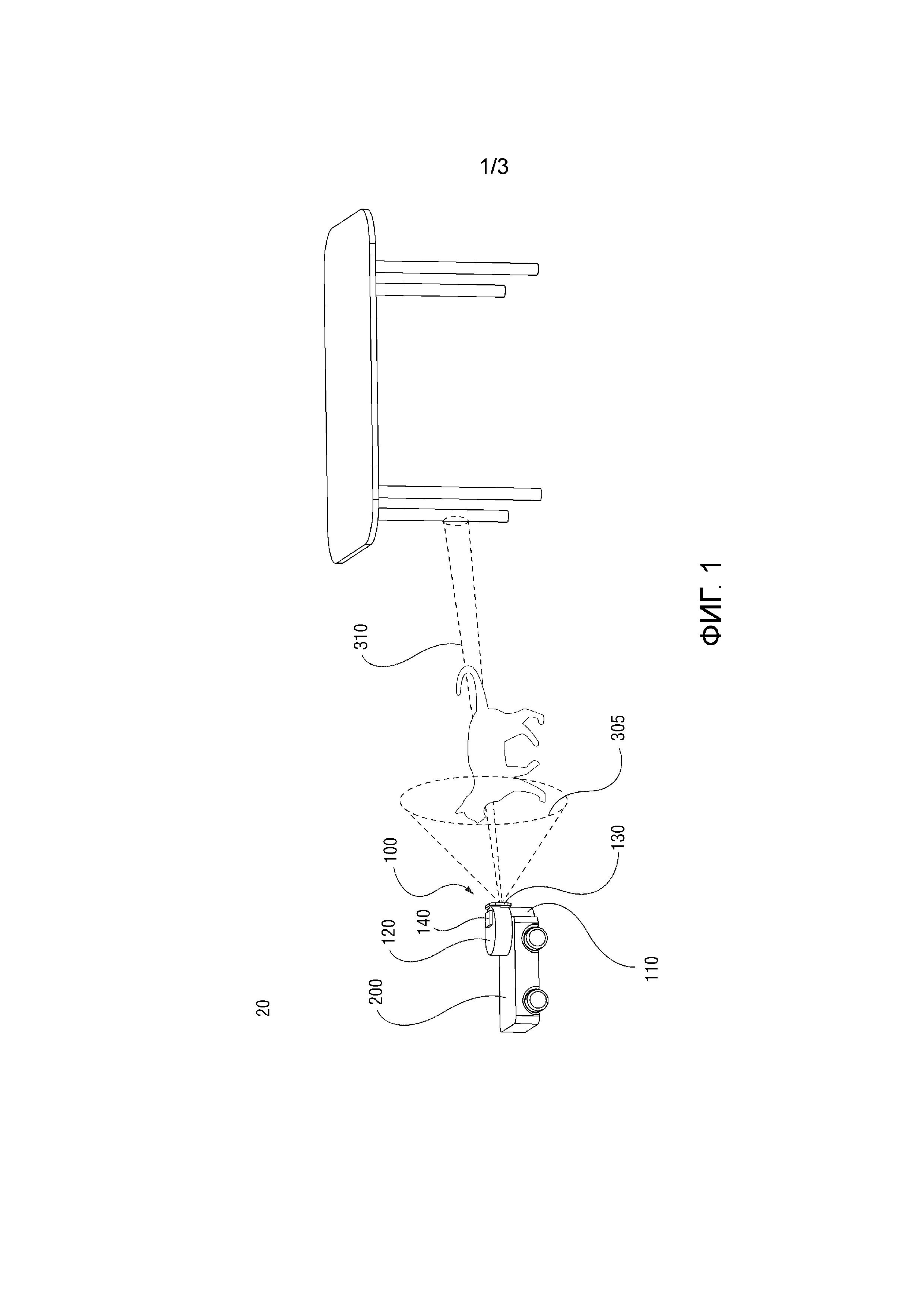
[Фиг. 1] Фиг. 1 схематично иллюстрирует подвижную платформу 200 с установленным на ней многорежимным радиочастотным (РЧ) датчиком 100 в соответствии с вариантом осуществления настоящего изобретения.
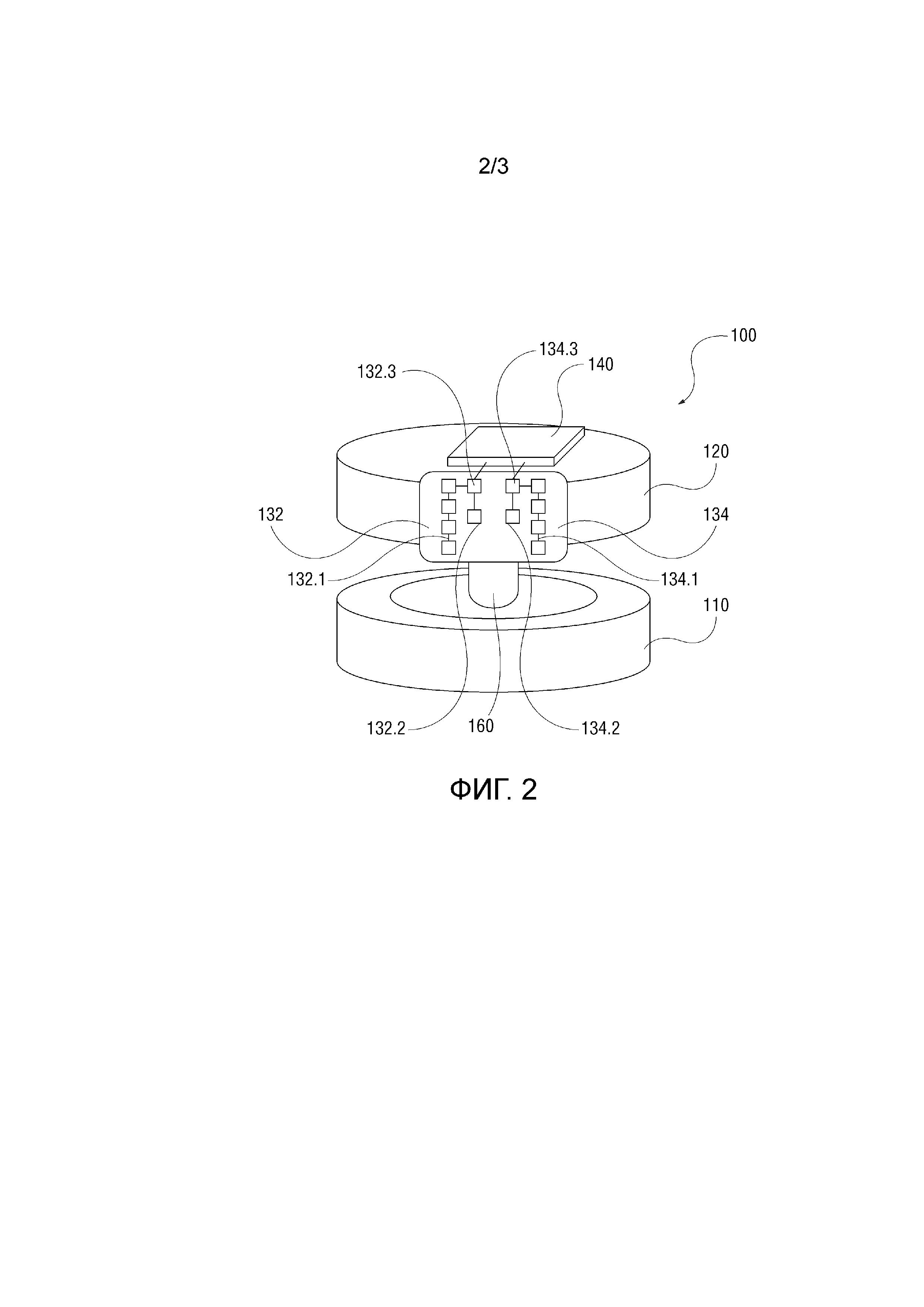
[Фиг. 2] Фиг. 2 схематично иллюстрирует многорежимный радиочастотный (РЧ) датчик 100 в соответствии с одним вариантом осуществления настоящего изобретения.
[Фиг. 3] Фиг. 3 схематично иллюстрирует многорежимный радиочастотный (РЧ) датчик 100 в соответствии с другим вариантом осуществления настоящего изобретения.
Подробное описание вариантов осуществления настоящего изобретения
[0019] Фиг. 1 схематично иллюстрирует подвижную платформу 200 с установленным на ней многорежимным радиочастотным (РЧ) датчиком 100 в соответствии с вариантом осуществления настоящего изобретения. Подвижной платформой 200 может быть, но без ограничения упомянутым, робот–пылесос, робот–уборщик, мультикоптер, транспортное средство, в котором многорежимный РЧ датчик 100 является частью системы помощи водителю (ADAS), очищающий/увлажняющий воздух робот, робот контроля жизнедеятельности. На фигуре 1 показано, что подвижная платформа 200 с установленным на ней многорежимным РЧ датчиком 100 перемещается по пространству 20. На фигуре 1 также показаны две возможные зоны 305, 310 излучения радара, соответственно, во второй области наблюдения и в первой области наблюдения. Несмотря на то, что на фигуре 1 одновременно показаны две зоны 305, 310 излучения, должно быть понятно, что РЧ радар 130 осуществляет излучение с этими зонами 305, 310 излучения поочередно. Другими словами, сначала РЧ радар 130 осуществляет излучение с зоной 310 излучения при вращении РЧ радара на всем протяжении первой области наблюдения РЧ радара 130, а затем, после переключения режима устройством 140 контроля и обработки на режим излучения во второй области наблюдения, РЧ радар 130 осуществляет излучение с зоной 305 излучения при вращении РЧ радара на всем протяжении второй области наблюдения РЧ радара 130. На фигуре 1 показано, что в первой области наблюдения обнаруживается объект – ножка стола, местоположение которой используется при реализации функции навигации подвижной платформы 200 и/или функции составления карты навигации, а во второй области наблюдения обнаруживается объект – кошка, т.е. потенциальное препятствие на пути перемещения подвижной платформы 200, местоположение которой используется при реализации функции обнаружения препятствий и/или функции управления перемещением подвижной платформы 200 для объезда препятствия. Как показано на фигуре данные объекты обнаруживаются разными типами излучения. Таким образом, многорежимный РЧ датчик 100 способен реализовывать многорежимность.
[0020] Многорежимный радиочастотный (РЧ) датчик 100 может быть установлен на подвижную платформу 200 для реализации подвижной платформой 200 одновременно по меньшей мере двух функций. В предпочтительном варианте осуществления настоящего изобретения функциями являются функция навигации и функция обнаружения препятствия. В других вариантах осуществления настоящего изобретения реализуемые функции могут включать в себя функцию построения навигационной карты пространства 20, в котором находится подвижная платформа 200 с установленным на ней многорежимным радиочастотным (РЧ) датчиком 100, функцию обнаружения транспортных средств и/или пешеходов и/или дорожных препятствий, функцию контроля сердцебиения или дыхания живых организмов, таких как, например, люди и домашние питомцы, функцию обнаружения и/или распознавания движений живых организмов.
[0021] В предпочтительном варианте осуществления, проиллюстрированном на фиг. 1, многорежимный радиочастотный РЧ датчик 100 содержит неподвижное основание 110, которое приспособлено для установки на подвижную платформу 200, способную перемещаться в пространстве 20. Как проиллюстрировано на фиг. 1, неподвижное основание 110 может быть установлено в передней части подвижной платформы 200. Однако, ограничивать настоящее изобретение таким положением установки не следует, поскольку неподвижное основание 110 может быть установлено в других частях подвижной платформы 200, например, в задней части, в боковой части, в центральной части верхней поверхности и так далее. Кроме того, неподвижное основание 110 может быть установлено не только на верхней поверхности подвижной платформы 200, но также и на нижней поверхности подвижной платформы 200 (т.е. в просвете между дном подвижной платформы 200 и поверхностью, по которой подвижная платформа 200 движется).
[0022] Пространством 20 может быть любое окружение, в котором в настоящий момент находится подвижная платформа 200 с установленным на ней многорежимным радиочастотным (РЧ) датчиком 100, например, но без ограничения упомянутым, пространство любого помещения, дорожное пространство, воздушное пространство и так далее. Конкретное пространство будет определяться типом подвижной платформы 200, т.е. роботы–пылесосы и транспортные средства обычно перемещаются в пространствах разных типов.
[0023] Неподвижное основание 110 может иметь средства крепления к подвижной платформе любого типа. Неподвижное основание 110 может быть выполнено с возможностью поддержки с возможностью вращения вращающейся части 120, которая устанавливается любым способом на неподвижное основание 110 и выполнена с возможность вращения относительно неподвижного основания 110 в горизонтальной плоскости. Должно быть понятно, что в одном варианте осуществления многорежимный радиочастотный РЧ датчик 100 может не включать в себя неподвижное основание 110. Тогда вращающаяся часть 120 может быть непосредственно установлена на одной из поверхностей подвижной платформы 200 с возможностью кругового вращения.
[0024] Вращающаяся часть 120 и неподвижное основание 110 могут иметь любые формы, которые обеспечивают возможность прикрепления вращающейся части 120 к неподвижному основанию 110 с возможностью вращения. Конкретные способы такого крепления известны из уровня техники. Одной конкретной формой вращающейся части может быть цилиндрическая форма. На вращающейся части 120 может быть установлен РЧ радар 130. Положение и способ установки РЧ радара 130 на вращающейся части 120 конкретным образом не ограничены при условии, что середина конусообразной зоны излучения РЧ радара 130 направлена по существу параллельно вектору движения подвижной платформы 200, т.е. РЧ радар 130 устанавливается на вращающейся части перпендикулярно вектору движения подвижной платформы 200.
[0025] В конкретном примере на фиг. 1 проиллюстрирована подвижная платформа 200, в данном примере робот–пылесос, с установленным на ней многорежимным РЧ датчиком 100. Проиллюстрированная подвижная платформа 200 перемещается по помещению и выполняет уборку. На фиг. 1 также проиллюстрированы две возможных зоны 305, 310 излучения в некоторой части первой области наблюдения РЧ радара 130. Зона 305 излучения в вертикальной плоскости (если смотреть на подвижную платформу 200 сбоку) является более широкой (в n раз шире), чем зона 310 излучения в вертикальной плоскости. В горизонтальной плоскости (если смотреть на подвижную платформу 200 сверху или снизу) зона 305 излучения и зона 310 излучения могут, но без ограничения упомянутым, иметь одинаковую ширину. Далее, при упоминании «более широкой/широкой» зоны излучения подразумевается излучение с большим углом раскрыва в вертикальной плоскости, но с меньшей дальностью, а при упоминании «более узкой/узкой» зоны излучения подразумевается излучение с меньшим углом раскрыва в вертикальной плоскости, но с большей дальностью. Подробная информация по формированию указанных зон 305, 310 излучения, по компонентам, которые такое формирование могут осуществлять, а также подробности по другим характеристикам используемого излучения будут описаны далее при более подробном рассмотрении структуры РЧ радара 130 и процесса переключения режимов работы многорежимного радиочастотного РЧ датчик 100. Должно быть понятно, что в предпочтительном варианте осуществления настоящего изобретения РЧ радар 130 осуществляет излучение в первой области наблюдения с использованием более узкой зоны 310 излучения, а во второй области наблюдения переключается на использование более широкой зоны 305 излучения. Тем не менее, настоящее изобретение не следует ограничивать такими конкретными соответствиями между областями наблюдения и типами зон излучения, поскольку производитель многорежимного РЧ датчика 100 может, по мере необходимости, предварительно сконфигурировать другие соответствия между областями наблюдения и типами зон излучения. Кроме того, производитель многорежимного РЧ датчика 100 может дополнительно, по мере необходимости, увеличить количество областей наблюдения, увеличить количество типов зон излучения, а также скорректировать направление излучения РЧ радара 130 многорежимного РЧ датчика 100 так, чтобы скорректированное направление охватывало предопределенную находящуюся выше в вертикальной плоскости область или предопределенную находящуюся ниже в вертикальной плоскости область.
[0026] Фиг. 2 схематично иллюстрирует многорежимный радиочастотный (РЧ) датчик 100 в соответствии с вариантом осуществления настоящего изобретения. Подвижная платформа 200 на данной фиг. 2 не показана. Многорежимный РЧ датчик 100 главным образом включает в себя описанные выше со ссылкой на фиг. 1 неподвижное основание 110 и вращающуюся часть 120, а также РЧ радар 130, устройство 140 контроля и обработки, которые будут описаны далее.
[0027] В предпочтительном варианте осуществления настоящего изобретения РЧ радар 130 включает в себя один или более передающих каналов 132, каждый из которых включает в себя по меньшей мере одну передающую антенну 132.1 с первой апертурой и по меньшей мере одну передающую антенну 132.2 со второй апертурой. Кроме того, РЧ радар 130 включает в себя один или более приемных каналов 134, каждый из которых включает в себя по меньшей мере одну приемную антенну 134.1 с первой апертурой и по меньшей мере одну приемную антенну 134.2 со второй апертурой.
[0028] Устройство 140 контроля и обработки выполнено с возможностью управления режимами работы РЧ радара 130 многорежимного РЧ датчика 100 для попеременного переключения режимов работы РЧ радара 130 многорежимного РЧ датчика 100, а также для побуждения электромотора (не показан на фиг. 2) или другого приводного механизма к вращению вращающейся части 120 во время работы РЧ радара 130 многорежимного РЧ датчика 100. Вращение может происходить по часовой стрелке или против часовой стрелки. В предпочтительном варианте осуществления настоящего изобретения управление режимами работы РЧ радара 130 многорежимного РЧ датчика 100 содержит побуждение РЧ радара 130 многорежимного РЧ датчика 100 к работе, в определенные моменты времени, через антенны 132.1, 134.1 с первой апертурой, а в другие определенные моменты времени через антенны 132.2, 134.2 со второй апертурой.
[0029] Устройство 140 контроля и обработки дополнительно выполнено с возможностью отправки данных, воспринимаемых РЧ радаром 130 на процессор подвижной платформы для обеспечения возможности управления подвижной платформой 200 на основе упомянутых данных с реализацией подвижной платформой 200 одновременно по меньшей мере двух функций, например, функций навигации и обнаружения объектов в пространстве 20.
[0030] Упомянутое управление режимами работы РЧ радара 130 многорежимного РЧ датчика 100 содержит: (i) переключение режима работы РЧ радара 130 на первый режим работы, содержащий излучение, в первой области наблюдения многорежимного РЧ датчика 100, множества РЧ сигналов посредством одной или более передающих антенн 132.1 с первой апертурой и прием первого множества отраженных РЧ сигналов посредством одной или более приемных антенн 134.1 с первой апертурой; (ii) переключение режима работы РЧ радара 130 на второй режим работы, содержащий излучение, во второй области наблюдения многорежимного РЧ датчика 100, множества РЧ сигналов посредством одной или более передающих антенн 132.2 со второй апертурой и прием второго множества отраженных РЧ сигналов посредством одной или более приемных антенн 134.2 со второй апертурой; (iii) получение синтезированной апертуры, охватывающей как первую область наблюдения, так и вторую область наблюдения многорежимного РЧ датчика 100, на основе первого множества отраженных РЧ сигналов для обеспечения возможности реализации подвижной платформой 200 первой функции, например, функции навигации; и (iv) обнаружение объектов во второй области наблюдения многорежимного РЧ датчика 100 на основе второго множества отраженных РЧ сигналов для обеспечения возможности реализации подвижной платформой 200 второй функции, например функции обнаружения объектов.
[0031] Далее приводятся подробности операции (i). Упомянутая первая апертура больше второй апертуры в n раз. Таким образом, передающая антенна 132.1 с первой апертурой выполнена с возможностью излучения множества РЧ сигналов с помощью сравнительно более узкой зоны 310 излучения, а приемная антенна 134.1 с первой апертурой выполнена с возможностью приема соответствующего первого множества отраженных РЧ сигналов. Поскольку антенна с первой апертурой обеспечивает более узкую зону 310 излучения, т.е. зону излучения с меньшим углом раскрыва и большей дальностью в сравнении с углом раскрыва и дальностью зоны 305 излучения, излучение в зоне 310 излучения пригодно для реализации навигации и/или построения карты навигации по пространству 20 в режиме реального времени. Излучение с зоной 310 излучения выполняют в первой области наблюдения многорежимного РЧ датчика 100, которую предварительно конфигурируют в той области наблюдения, которая не охвачена второй областью наблюдения, обращенной строго вперед по ходу движения подвижной платформы 200. В качестве примера, если угол второй области наблюдения в горизонтальной плоскости равен 60°, первую область наблюдения предварительно конфигурируют так, чтобы она охватывала оставшиеся 300° вокруг подвижной платформы 200. Указанные значения углов первой и второй областей наблюдения приведены лишь в качестве конкретного примера, а не ограничения.
[0032] В случае обнаружения объекта в первой области наблюдения на основе первого множества отраженных РЧ сигналов, устройство 140 контроля и обработки дополнительно выполнено с возможностью отправки сигнала об объекте на обработку в процессор подвижной платформы 200 для того, чтобы учитывать этот объект при реализации навигации и/или построении карты навигации по пространству 20 в режиме реального времени или провести анализ первого множества отраженных РЧ сигналов для других целей.
[0033] Далее приводятся подробности операции (ii). Упомянутая вторая апертура меньше первой апертуры в n раз. Таким образом, передающая антенна 132.2 со второй апертурой выполнена с возможностью излучения множества РЧ сигналов с помощью сравнительно более широкой зоны 305 излучения, а приемная антенна 134.2 со второй апертурой выполнена с возможностью приема соответствующего второго множества отраженных РЧ сигналов. Поскольку антенна со второй апертурой обеспечивает более широкую зону 305 излучения, т.е. зону излучения с большим углом раскрыва и меньшей дальностью в сравнении с углом раскрыва и дальностью зоны 310 излучения, излучение в зоне 305 излучения пригодно для реализации обнаружения относительно близких объектов, потенциальных препятствий, на пути движения подвижной платформы 200. Излучение с зоной 305 излучения выполняют во второй области наблюдения многорежимного РЧ датчика 100, обращенной строго вперед по ходу движения подвижной платформы 200 (в вышеупомянутом примере угол второй области наблюдения равен 60°).
[0034] Излучение в зоне 305 излучения во второй области наблюдения дополнительно может быть использовано для обнаружения сердцебиения или дыхания живых организмов, когда они встречаются на пути подвижной платформы 200. В случае обнаружения объекта во второй области наблюдения с помощью излучения в зоне 305 излучения на основе второго множества отраженных РЧ сигналов, устройство 140 контроля и обработки дополнительно выполнено с возможностью отправки сигнала об объекте на обработку в процессор подвижной платформы 200 для того, чтобы скорректировать путь подвижной платформы 200 или провести анализ второго множества отраженных РЧ сигналов на предмет наличия сердцебиения, дыхания и так далее. Корректировка маршрута может осуществляться на основе координат обнаруженного объекта и, необязательно, карты навигации, которая строится в режиме реального времени в вышеописанном первом режиме работы РЧ радара 130 многорежимного РЧ датчика 100.
[0035] Далее приводятся подробности операции (iii). Поскольку во второй области наблюдения (охватывающей 60° в вышеуказанном примере строго перед подвижной платформой 200 РЧ радар 130 работает во втором режиме работы, т.е. с использованием зоны 305 излучения, которая применяется не для реализации навигации, а для обнаружения объектов непосредственно на пути движения платформы, для учета этой второй области наблюдения для реализации навигации и/или построения карты навигации по пространству 20 в режиме реального времени, устройство 140 контроля и обработки выполнено с возможностью получения синтезированной апертуры, охватывающей как первую область наблюдения, так и эту вторую область наблюдения, РЧ радара 130 многорежимного РЧ датчика 100 на основе первого множества отраженных РЧ сигналов, полученного в первой области наблюдения, для обеспечения возможности реализации подвижной платформой 200 функции навигации с учетом всей 360–градусной области наблюдения вокруг подвижной платформы 200. Таким образом, первая область наблюдения и вторая область наблюдения РЧ радара 130 многорежимного РЧ датчика 100 в совокупности охватывают 360–градусную область наблюдения вокруг подвижной платформы 200.
[0036] В предпочтительном варианте осуществления настоящего изобретения устройство 140 контроля и обработки выполнено с возможностью получения синтезированной апертуры, охватывающей как первую область наблюдения, так и вторую область наблюдения РЧ радара 130 многорежимного РЧ датчика 100 на основе первого множества отраженных РЧ сигналов. Ситнезирование аппертуры – методика обработки сигналов, позволяющая существенно повысить разрешающую способность и состоит в последовательном во времени приеме отраженных сигналов при различном положении фазового центра антенн и последующем суммировании данных отраженных сигналов, умноженных на фазовый сдвиг фазового центра антенн. В предпочтительном варианте осуществления настоящего изобретения, синтезированная апертура может быть получена, применяя Быстрое преобразование Фурье (БПФ) к первому множеству отраженных РЧ сигналов. Для этого N отраженных РЧ сигналов первого множества отраженных РЧ сигналов или их часть (предполагается, что всего было выполнено N+M измерений в N+M моментов времени, где N – измерения в первой области наблюдения РЧ радара 130, М – измерения во второй области наблюдения РЧ радара 130) суммируются по формуле:
 ,
,
где  – комплекскное представление отраженного сигнала с информацией о фазе и амплитуде, принятого в определенный момент времени, R – расстояние от фазового центра антенн до центра вращения вращающейся части 120 относительно неподвижного основания 110,
– комплекскное представление отраженного сигнала с информацией о фазе и амплитуде, принятого в определенный момент времени, R – расстояние от фазового центра антенн до центра вращения вращающейся части 120 относительно неподвижного основания 110,  – угол образованный фазовым центром антенн в момент приема отраженного сигнала, центром вращения вращающейся части 120 и некоторым фиксированным заранее определенным «нулевым» направлением, например одна из границ перехода между первой и второй областью наблюдения,
– угол образованный фазовым центром антенн в момент приема отраженного сигнала, центром вращения вращающейся части 120 и некоторым фиксированным заранее определенным «нулевым» направлением, например одна из границ перехода между первой и второй областью наблюдения,  – длина волны несущей отраженных сигналов,
– длина волны несущей отраженных сигналов,  – угол образованный направлением наблюдения в первой или второй областях наблюдения и заранее определенным «нулевым» направлением. Для осуществления кругового обзора значение выбирается из диапазона от 0 до 360 градусов с шагом, который необходим для получения однозначной картины. В предпочтительном варианте осуществления этот шаг равен 1/4 разрешения системы, которое пропорционально
– угол образованный направлением наблюдения в первой или второй областях наблюдения и заранее определенным «нулевым» направлением. Для осуществления кругового обзора значение выбирается из диапазона от 0 до 360 градусов с шагом, который необходим для получения однозначной картины. В предпочтительном варианте осуществления этот шаг равен 1/4 разрешения системы, которое пропорционально  .
.  позволяет получить информацию об отраженном сигнале в направлении как в первой, так и во второй области наблюдения (т.е. синтезировать отраженный сигнал для той области наблюдения, в которой непосредственного измерения не проводилось).
позволяет получить информацию об отраженном сигнале в направлении как в первой, так и во второй области наблюдения (т.е. синтезировать отраженный сигнал для той области наблюдения, в которой непосредственного измерения не проводилось).
[0037] Далее приводятся подробности операции (iv). Устройство 140 контроля и обработки дополнительно выполнено с возможностью обнаружения объектов во второй области наблюдения многорежимного РЧ датчика 100 на основе второго множества отраженных РЧ сигналов для обеспечения возможности реализации подвижной платформой 200 второй функции, например, функции обнаружения объектов. Обнаружение объектов в данном случае может осуществлять следующим образом: Когда устройством 140 контроля и обработки определяется, что РЧ радар 130 многорежимного РЧ датчика 100 находится во второй области наблюдения, устройство 140 контроля и обработки побуждает передающую антенну 132.2 со второй апертурой излучить РЧ сигнал в зоне 310 излучения. В этом примере один РЧ сигнал используется для упрощения описания, в фактической реализации множество РЧ сигналов излучается в разных положениях (обеспечиваемых постепенным перемещением РЧ радара 130 на вращающейся части 120) в пределах области наблюдения для того, чтобы охватить всю упомянутую (первую, вторую или другую предварительно сконфигурированную область наблюдения). В случае присутствия какого–либо объекта, потенциального препятствия, во второй области наблюдения, излученный РЧ сигнал отражается и принимается приемной антенной 134.2 со второй апертурой и соответственно приемным каналом многорежимного РЧ датчика 100. В случае М измерений, устройство 140 контроля и обработки формирует второе множество отраженных РЧ сигналов в порядке их приема. Затем, данное второе множество отраженных РЧ сигналов может быть оцифровано так, что каждый оцифрованный сигнал из упомянутого второго множества представляет собой последовательность отсчетов. Уровень сигнала в каждом отсчете сравнивается с некоторым, заранее или программно–заданным пороговым значением. Если в результате сравнения во втором множестве отраженных РЧ сигналов имеется по меньшей мере один сигнал, уровень которого превышает упомянутое пороговое значение– устройство 140 контроля и обработки выдает сигнал о наличии препятствия, который может использоваться для корректировки маршрута движения подвижной платформы 200 или остановки. Алгоритм обнаружения объектов может быть дополнительно применен аналогичным образом для обнаружения транспортных средств и/или пешеходов и/или дорожных препятствий при реализации функции обнаружения транспортных средств и/или пешеходов и/или дорожных препятствий, когда подвижной платформой 200 является транспортное средство.
[0038] Построение карты навигации может быть осуществлено следующим образом: РЧ радар 130 совершает один оборот вокруг оси вращения, собирая N+M отраженных сигналов и передавая их устройству 140 контроля и обработки. За время, что РЧ радар 130 совершает следующий оборот, устройство 140 контроля и обработки осуществляет синтезирование аппертуры согласно описанию в абзаце [036] данной заявки и формирует синтезированные оцифрованные сигналы по каждому направлению в первой и второй области наблюдения с заранее определнным шагом. Синтезированные оцифрованные сигналы представляют собой последовательность отсчетов в каждом направлении наблюдения. Уровень сигнала в каждом отсчете сравнивается с некоторым, заранее или программно–заданным пороговым значением. Если в результате сравнения в множестве синтезированных оцифрованных сигналов имеется сигнал, уровень которого превышает упомянутое пороговое значение– устройство 140 контроля и обработки выдает сигнал о наличии препятствия в данном направлении, при этом номер в полседовательности отсчета соответствует дальности расположения препятствия, который может использоваться для корректировки маршрута движения подвижной платформы 200 или остановки. Устройство 140 контроля и обработки определяет наличие препятствий и расстояние до них в каждом из направлений наблюдения и передает их на процессор. Процессор (процессор подвижной платформы 200 или любой другой процессор, интегрированный с многорежимным РЧ датчиком 100) может быть выполнен с возможностью построения карты расположения препятствии относительно подвижной платформы 200. Затем данная операция может быть повторена после следующего оборота РЧ радара 130 вокруг своей оси.
[0039] РЧ радар 130 дополнительно может быть выполнен с возможностью обнаружения сердцебиения и/или дыхания. Так как чатсота дыхания и сердцебиения колеблется от 0,2 до 2 Гц, то радар должен вращаться со скростью порядка 10 оборотов в секунду (в предпочтительном варианте осуществления – чем чаще, тем лучше) и делать по меньшей мере 5 измерений (в предпочтительном варианте осуществления – чем больше, тем лучше) во второй области наблюдения. В этом случае за 1 секунду РЧ радар 130 будет получать порядка 50 измерений. Так как 50>>2, то возможно сделать преобразование Фурье и выделить несущую частоту соответсвтующую частоте дыхания человека или его сердцебеению.
[0040] РЧ радар 130 дополнительно может быть выполнен с возможностью обнаружения движений живых организмов за счет обнаружения микро–Допплеровского сдвига частоты в отраженных сигналах посредством усреднения измерений полученных в соответствии с приведенным выше описанием в абзаце [0039].
[0041] Кроме того, специалисту в данной области техники будет быть понятно, что частота вращения вращающейся части 120 подбирается таким образом, чтобы расстояние, на которое переместится подвижная платформа 200, было сравнимо с расстоянием, которое преодолевает подвижная платформа 200 с момента выдачи сигнала управления перемещением, например, сигнала команды на остановку, до самой остановки. Например, если роботу–пылесосу требуется 5 см на остановку при скорости 30см/сек, значит скорость вращения должна быть более чем 6 оборотов в секунду, но обычно не более 30 оборотов в секунду. Частота замеров N РЧ радара 130 за время одного периода должна быть больше 6πR/ во избежание возникновения ложных целей. В предпочтительном варианте осуществления настоящего изобретения выбирается частота равная одному замеру на градус поворота вращающейся части 120.
во избежание возникновения ложных целей. В предпочтительном варианте осуществления настоящего изобретения выбирается частота равная одному замеру на градус поворота вращающейся части 120.
[0042] Используемые в данном описании термины «первый» и «второй» не предполагаются для указания предпочтительной очередности выполнения определяемых такими терминами действий, а также не предполагаются для указания какого–либо приоритета между элементами, которые они определяют. Предполагается, что термины «первый» и «второй» используются лишь для проведения различия между определяемыми ими действиями или элементами в целях упрощения описания. Аналогичное замечание актуально и для позиционных обозначений, используемых в материалах данной заявки.
[0043] В предпочтительном варианте осуществления настоящего изобретения устройство 140 контроля и обработки дополнительно выполнено с возможностью определения положения вращающейся части 120 относительно неподвижного основания 110 и определения моментов времени работы РЧ радара 130 через антенны 132.1, 134.1 с первой апертурой и моментов времени работы РЧ радара 130 через антенны 132.2, 134.2 со второй апертурой. Другими словами, устройство 140 контроля и обработки выполнено с возможностью определения, находится ли вращающийся на вращающейся части 120 РЧ радар 130 многорежимного РЧ датчика 100 в первой области наблюдения или второй области наблюдения.
[0044] В одном варианте осуществления упомянутого определения положения посредством устройства 140 контроля и обработки, многорежимный РЧ датчик 100 дополнительно содержит фотодиод 150, установленный на вращающей части 120 в предопределенном положении. Фотодиод 150 устанавливается так, чтобы быть обращенным на поверхность неподвижного основания 110 или поверхность подвижной платформы 200, на которую нанесена структура (пример наносимой структуры для множества разных областей наблюдения проиллюстрирован на фигуре 3), указывающая первую область наблюдения и вторую область наблюдения многорежимного РЧ датчика 100. Упомянутой структурой может быть круговая область, в которой, например, первой области наблюдения соответствует матовая поверхность одного цвета, а второй области наблюдения соответствует глянцевая поверхность другого цвета. Таким образом, при вращении вращающейся части 120 фотодиод 150 выполнен с возможностью обнаружения особенности (глянцевая или матовая, например) структуры, указывающей нахождение РЧ радара 130 многорежимного РЧ датчика 100 в одной из упомянутых областей или переход РЧ радара 130 многорежимного РЧ датчика 100 из одной области в другую. Таким образом, фотодиод 150 выполнен с возможностью выдачи сигнала, на основе результата обнаружения, который указывает, в какой области наблюдения в данный момент находится РЧ радар 130 многорежимного РЧ датчика 100, и может быть использован для определения упомянутых моментов времени переключения режимов работы РЧ радар 130 многорежимного РЧ датчика 100.
[0045] В другом варианте осуществления упомянутого определения положения посредством устройства 140 контроля и обработки, многорежимный РЧ датчик 100 дополнительно содержит шаговый электродвигатель 160, связанный с вращающейся частью 120 и откалиброванный на основе предопределенной первой области наблюдения и второй области наблюдения РЧ радара 130 многорежимного РЧ датчика 100. При этом шаговый электродвигатель 160 выполнен с возможностью обнаружения перехода РЧ радара 130 многорежимного РЧ датчика 100 из одной упомянутой области в другую или нахождения РЧ радара 130 многорежимного РЧ датчика 100 в определенной одной области наблюдения, и выдачи сигнала на основе результата обнаружения, который используется для определения упомянутых моментов времени или текущей области наблюдения.
[0046] В предпочтительном варианте осуществления настоящего изобретения устройство 140 контроля и обработки многорежимного РЧ датчика 100 интегрируется с РЧ радаром 130 как система на кристалле (СнК), система в корпусе (СвК), программируемая логическая интегральная схема (FPGA), интегральная схема специального назначения (ASIC). Данная особенность настоящего изобретения не иллюстрируется на фигурах.
[0047] Для переключения режима работы РЧ радара 130 многорежимного РЧ датчика 100 может быть использован РЧ ключ. В варианте осуществления настоящего изобретения РЧ радар 130 содержит по меньшей мере один РЧ ключ 132.3 по меньшей мере одного передающего канала 132 и по меньшей мере один РЧ ключ 134.3 по меньшей мере одного приемного канала 134. Упомянутый по меньшей мере один РЧ ключ 132.3 по меньшей мере одного передающего канала 132 выполнен с возможностью переключения между одной или более передающих антенн 132.1 с первой апертурой и одной или более передающих антенн 132.2 со второй апертурой на основании определенного момента времени переключения режима работы РЧ радара 130 или определенного положения РЧ радара 130, т.е. находится ли в настоящий момент РЧ радар 130 в первой области наблюдения или второй области наблюдения. Упомянутый по меньшей мере один РЧ ключ 134.3 по меньшей мере одного приемного канала 134 выполнен с возможностью переключения между одной или более приемных антенн 134.1 с первой апертурой и одной или более приемных антенн 134.2 со второй апертурой на основании определенного момента времени переключения режима работы РЧ радара 130 или определенного положения РЧ радара 130, т.е. находится ли в настоящий момент РЧ радар 130 в первой области наблюдения или второй области наблюдения.
[0048] В альтернативных вариантах осуществления настоящего изобретения, использующих принципы синтезируемой апертуры, можно задать большее число областей определения и, соответственно, выполнять переключение между большим числом режимов работы РЧ радара 130 многорежимного РЧ датчика 100. Кроме того, должно быть понятно, что на основании настоящего раскрытия также может быть обеспечен способ управления подвижной платформой с помощью раскрытого многорежимного РЧ датчика или сам способ работы многорежимного РЧ датчика. В таких вариантах осуществления операции выполняемые различными заявленными аппаратными компонентами могут реализовываться как соответствующие этапы указанных способов. В другом варианте осуществления может быть обеспечен считываемый компьютером носитель, хранящий исполняемые компьютером инструкции для реализации вышеуказанных этапов посредством вычислительного средства, например, процессора.
[0049] После ознакомления с данным описанием специалисту будут понятны другие варианты осуществления настоящего изобретения, модификации, эквивалентные признаки и особенности. Предполагается, что все такие другие варианты осуществления настоящего изобретения, модификации, эквивалентные признаки и особенности охватываются нижеприведенной формулой изобретения.
[0050] Перечень ссылочных позиций
100 – Многорежимный радиочастотный (РЧ) датчик
200 – Подвижная платформа
110 – Неподвижное основание
120 – Вращающаяся часть
130 – РЧ радар
140 – Устройство контроля и обработки
305 – Более широкая зона излучения
310 – Более узкая зона излучения
132 – Передающий канал
132.1 – Передающая антенна с первой апертурой
132.2 – Передающая антенна со второй апертурой
132.3 – РЧ ключ передающего канала
134 – Приемный канал
134.1 – Приемная антенна с первой апертурой
134.2 – Приемная антенна со второй апертурой
134.3 – РЧ ключ приемного канала
160 – Шаговый электродвигатель
150 – Фотодиод
Проявляющее устройство, оснащенное им устройство формирования изображения и способ сборки проявляющего устройства
Носитель информации и устройство для записи и/или воспроизведения данных
Оптический носитель записи и устройство для воспроизведения данных с оптического носителя записи
Устройство для воспроизведения данных с носителя записи
Способ управления радиоресурсами и устройство узла в, его реализующее
Система и способ для адаптации размера данных в пользовательском оборудовании
Устройство и способ для передачи и приема преамбул в системе цифровой широковещательной передачи видео
Устройство и способ для запроса возобновления расширенной услуги упорядоченного опроса в реальном времени в системе широкополосной беспроводной связи
Способ формирования библиотеки дисков
Устройство и способ составления подканала разнесения в системе беспроводной связи
Беспроводной электромагнитный приемник и система беспроводной передачи энергии
Беспроводной электромагнитный приемник и система беспроводной передачи энергии
Беспроводной электромагнитный приемник и система беспроводной передачи энергии
Метаматериальная резонансная структура
Способ, система и устройство для беспроводной передачи энергии (варианты)
Сверхширокополосная малогабаритная антенна и устройство связи, содержащее такую антенну
Сверхширокополосная компактная антенна
Плоская катушка индуктивности с повышенной добротностью
Компактная сверхширокополосная антенна
Система беспроводной зарядки мобильных устройств

