Результат интеллектуальной деятельности: СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[001] Настоящее изобретение относится к роботизированным системам для удерживания и манипулирования отдельными элементами, приспособлениями или инструментами роботохирургических комплексов, в частности, для минимально инвазивной хирургии.
Предпосылки создания изобретения
[002] В настоящее время роботы используются во многих отраслях промышленности: в машиностроении, авиации, судостроении, космонавтике, добыче полезных ископаемых, оборонной сфере и других областях. Роботы используются при работе в чрезвычайных и особо опасных условиях, где присутствует угроза человеческой жизни и здоровью, а также на тех предприятиях, где требуется высокая точность и высокая четкость последовательности выполняемых манипуляций.
[003] Медицина - одна из наиболее востребованных и перспективных отраслей для применения робототехники. Роботы в медицине служат как вспомогательные устройства, например, при решении каких-либо хирургических задач. Роботы в буквальном смысле становятся «руками врачей», ассистируя в сложнейших хирургических операциях. Применение роботов в медицине стало неотъемлемой частью медицинской практики.
[004] Переход от традиционной полостной операции к минимально инвазивной хирургии обусловлен рядом преимуществ от использования данной технологии проведения операции. В роботохирургии используются миниатюрные хирургические инструменты (ножницы, иглодержатель, зажим и т.п.) и 3D эндоскопическая камера, которые вводятся через небольшие разрезы до 15 мм в тело пациента и имеют размеры 5-10 мм в диаметре.
[005] В сравнении с традиционным способом проведения полостных операций минимально инвазивная хирургия по лапароскопическому принципу имеет следующие преимущества:
• более тщательное и точное исполнение хирургических манипуляций;
• меньшая кровопотеря у пациента;
• меньшая травма тканей;
• более короткий восстановительный период;
• более короткий срок пребывания в больнице.
[006] Развитие лапароскопии привело к возникновению совершенно новой области в медицине, называемой роботохирургией, где используются современные мехатронные механизмы и цифровые системы. Хирургические роботы были созданы для того, чтобы расширить возможности хирургов, ограниченные пределами обычной лапароскопии. Применение хирургических роботов в медицине обеспечено тем, что у роботохирургической системы есть задающее устройство - контроллер, управляемое оператором-хирургом, и есть исполнительное устройство - манипулятор с закрепленным хирургическим инструментом, который отрабатывает поступающие в цифровом виде команды, передаваемые от движений рук оператора-хирурга. Это дает значительные преимущества над традиционным способом проведения хирургической операции. На сегодняшний день роботы активно внедрены в медицинскую практику, прежде всего, в общую хирургию, кардиохирургию, урологию, гинекологию, нейрохирургию и др.
[007] Исполнительным механизмом в роботохирургических системах являются манипуляторы. Они осуществляют перемещения хирургических инструментов непосредственно в операционном поле. Применение в хирургии манипуляторов и их совершенствование становится все более актуальной научной и технической задачей. Наиболее известен роботохирургический комплекс «da Vinci» компании «Intuitive Surgical, Inc.». Система «da Vinci» состоит из трех основных компонентов: консоли с эндоскопической 3D камерой, главной консоли – задающего устройства оператора-хирурга и исполнительного механизма, в качестве которого выступает тележка с манипуляторами. Следует отметить, что большинство известных конструкций хирургических роботов повторяют принципиальную схему (архитектуру) робота «da Vinci». Проведенные исследования выявили ряд недостатков такой архитектуры:
• ограничение по точности перемещения инструмента;
• незначительная и ограниченная жесткость конструкции позиционирования манипулятора;
• значительный размер исполнительных устройств, в том числе манипуляторов;
• значительное пространство, занимаемое системой позиционирования инструмента относительно пациента.
[008] Существенным элементам роботохирургического комплекса являются устройства для крепления и позиционирования манипулятора относительно хирургического стола и пациента. В уровне техники известно устройство позиционирования манипуляторов, содержащее систему перемещения с установленными на ней манипуляторами и закрепленную на операционном столе (US20180078439 A1, опубл. 22.03.2018). Устройство крепится на стойку операционного стола таким образом, что обеспечивает расположение манипуляторов с двух сторон стола (устройство содержит четыре руки для позиционирования четырех манипуляторов относительно пациента). Операционный стол включает в себя столешницу, на которой располагается пациент, стойку и основание. Стойка для расположения столешницы крепится к основанию, которое стоит на полу и перемещается относительно пола с помощью колес. Крепежная система представляет собой блок крепления в виде двух L-образных колодок, которые облегают с двух сторон стойку операционного стола. На L-образных колодках предусмотрены направляющие, по которым могут перемещаться вертикальные опорные крепления. В каждой из L-образных колодок подвешено по две консоли/руки системы позиционирования манипуляторов. Каждую из консолей системы позиционирования можно перемещать по L-образным направляющим вокруг стойки против часовой стрелки. Системы позиционирования манипуляторов убираются под стол и обеспечивают полный доступ к операционному столу. Консоли позиционирования имеют конструкцию с последовательно соединенной кинематической цепью. Первое звено системы позиционирования представляет собой рычаг, соединенный с вертикальной опорой за счет поворотного соединения, которое может обеспечить вращательное движение первого звена. Перемещение первого звена и второго звена относительно операционного стола в боковом и в продольном направлении обеспечивает движение по направлениям осей X и Y. Второе звено обеспечивает подъем механизма в вертикальном направлении Z. Таким образом, система позиционирования манипуляторов может совершать перемещения по трем степеням свободы. После окончания хирургического вмешательства, для обеспечения доступа к хирургическому столу, конструкция системы позиционирования позволяет механизму складываться под столом в зонах со сторон ног и головы пациента. К существенным недостаткам рассматриваемого технического решения можно отнести следующее:
- конструкция системы позиционирования манипуляторов не позволяет быстро выводить манипуляторы из операционной зоны, что является обязательным условием для экстренных случаев прерывания лапароскопической операции и перехода к полостной операции;
- ограниченность по количеству возможных положений манипуляторов относительно пациента, что связано с креплением системы к основанию хирургического стола;
- недостаточная жесткость конструкции, что является немаловажным фактором для исполнительного устройства при проведении роботохирургической операции.
Суть изобретения
[009] Задачей настоящего изобретения является создание системы позиционирования манипуляторов, обеспечивающей крепление манипуляторов к операционному столу и увеличивающей количество возможных позиций манипулятора относительно пациента, располагающегося на операционном столе, и, кроме того, позволяющей убирать манипуляторы из операционной зоны в кратчайшие сроки.
[010] При решении поставленной задачи достигается технический результат, заключающийся в повышении жесткости крепления манипуляторов при одновременном увеличении возможных положений манипуляторов относительно пациента и в повышении скорости и снижении времени переведения манипуляторов в рабочее положение (рабочую зону) и обратно в зону хранения, расположенную под ножной частью столешницы операционного стола, таким образом, чтобы сохранить традиционные функциональные возможности стола, что позволяет быстро прервать роботохирургическую операцию и продолжить ее в режиме полостной операции.
[011] Для решения поставленной задачи и достижения технического результата была разработана система позиционирования манипуляторов роботохирургического комплекса, включающая по меньшей мере один фартук 7, расположенный с одной из сторон хирургического стола, содержащий устройство его крепления к стандартным точкам присоединения дополнительного оборудования хирургического стола, и снабженный направляющими 11, и систему перемещения, выполненную в виде горизонтального элемента 6, установленного на фартуке 7, по меньшей мере одной вертикальной колонны 8, установленной на горизонтальном элементе 6, и позиционирующего механизма 1 манипулятора 18 с хирургическим инструментом, выполненным с возможностью размещения в верхней части вертикальной колонны 8. Причем горизонтальный элемент 6 выполнен с возможностью вертикального перемещения относительно хирургического стола по направляющим 11 фартука 7 с помощью закрепленных на них и перемещающихся вдоль них по меньшей мере двух кареток 23, горизонтальный элемент 6 снабжен направляющими 12. Причем вертикальная колонна 8 выполнена в виде двухкомпонентной телескопической стойки 8 и снабжена направляющими 24 с внутренней стороны и направляющими 16 с лицевой стороны, колонна 8 выполнена с возможностью: горизонтального перемещения вдоль горизонтального элемента 6 по его направляющим 12 с помощью закрепленных на них и перемещающихся вдоль них по меньшей мере двух кареток 10, и вертикального перемещения относительно горизонтального элемента 6 по направляющим 24 при помощи по меньшей мере двух кареток 14, размещенных на соединительном модуле 15, который установлен на каретках 10 горизонтального элемента 6. Причем колонна 8 выполнена с возможностью вертикального перемещения относительно горизонтального элемента 6 в таком диапазоне, чтобы позиционирующий механизм 1 манипулятора перемещался выше уровня хирургического стола в рабочем положении и ниже уровня хирургического стола в нерабочем положении. Причем позиционирующий механизм 1 манипулятора закреплен на соединительном элементе 4 и включает поворотные консоли 2, 5, выполненные с возможностью поворота в горизонтальной плоскости. Причем соединительный элемент 4 вместе с позиционирующим механизмом 1 манипулятора выполнен с возможностью вертикального перемещения относительно горизонтального элемента 6 вдоль колонны 8 по направляющим 16 лицевой стороны колонны 8 с помощью закрепленных на них и перемещающихся вдоль них по меньшей мере двух кареток, размещенных на соединительном элементе 4. Причем поворотные консоли 2, 5 выполнены с возможностью поворота в горизонтальной плоскости таким образом, чтобы консоль 2, находясь над поверхностью хирургического стола в рабочем положении, совершала полный оборот на 360 градусов и имела возможность ограниченного поворота под поверхностью стола в нерабочем состоянии. При этом консоль 5 выполнена с возможностью установки на ней узла крепления и позиционирования 3 манипулятора 18 с хирургическим инструментом, а узел 3 выполнен с возможностью поворота вокруг своей оси для приведения манипулятора 18 в рабочее положение. При этом все элементы системы оснащены сервоприводами и контроллерами, выполненными с возможностью приема и передачи управляющих команд от центрального блока управления роботохирургического комплекса для выполнения элементами системы согласованных движений.
[012] В некоторых вариантах осуществления изобретения по меньшей мере одна поворотная консоль с узлом крепления и позиционирования 3, на котором установлен манипулятор 18 с хирургическим инструментом, в нерабочем положении располагается под хирургическим столом и образуют зону хранения манипуляторов.
[013] В некоторых вариантах осуществления изобретения зона хранения манипуляторов расположена в ножной секции хирургического стола.
[014] В некоторых вариантах осуществления изобретения система позиционирования манипуляторов дополнительно включает систему стерилизации, расположенную в зоне хранения манипуляторов.
[015] В некоторых вариантах осуществления изобретения зона хранения манипуляторов сконфигурирована таким образом, чтобы расположенные в ней манипуляторы не ограничивали стандартные перемещения хирургического стола.
Краткое описание чертежей
[016] Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
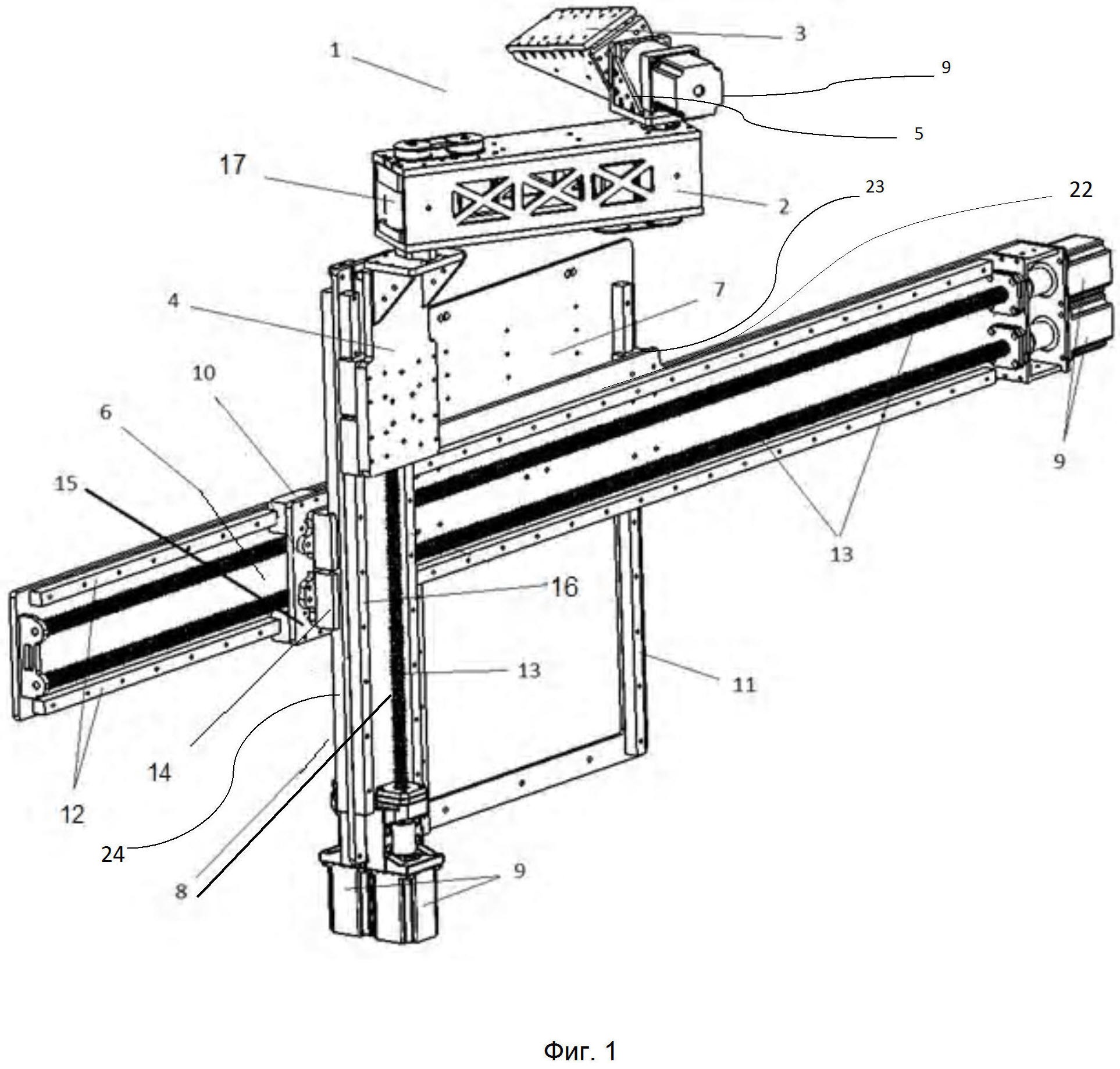
[017] Фиг. 1 иллюстрирует механизм системы позиционирования манипуляторов и крепления ее к операционному хирургическому столу.
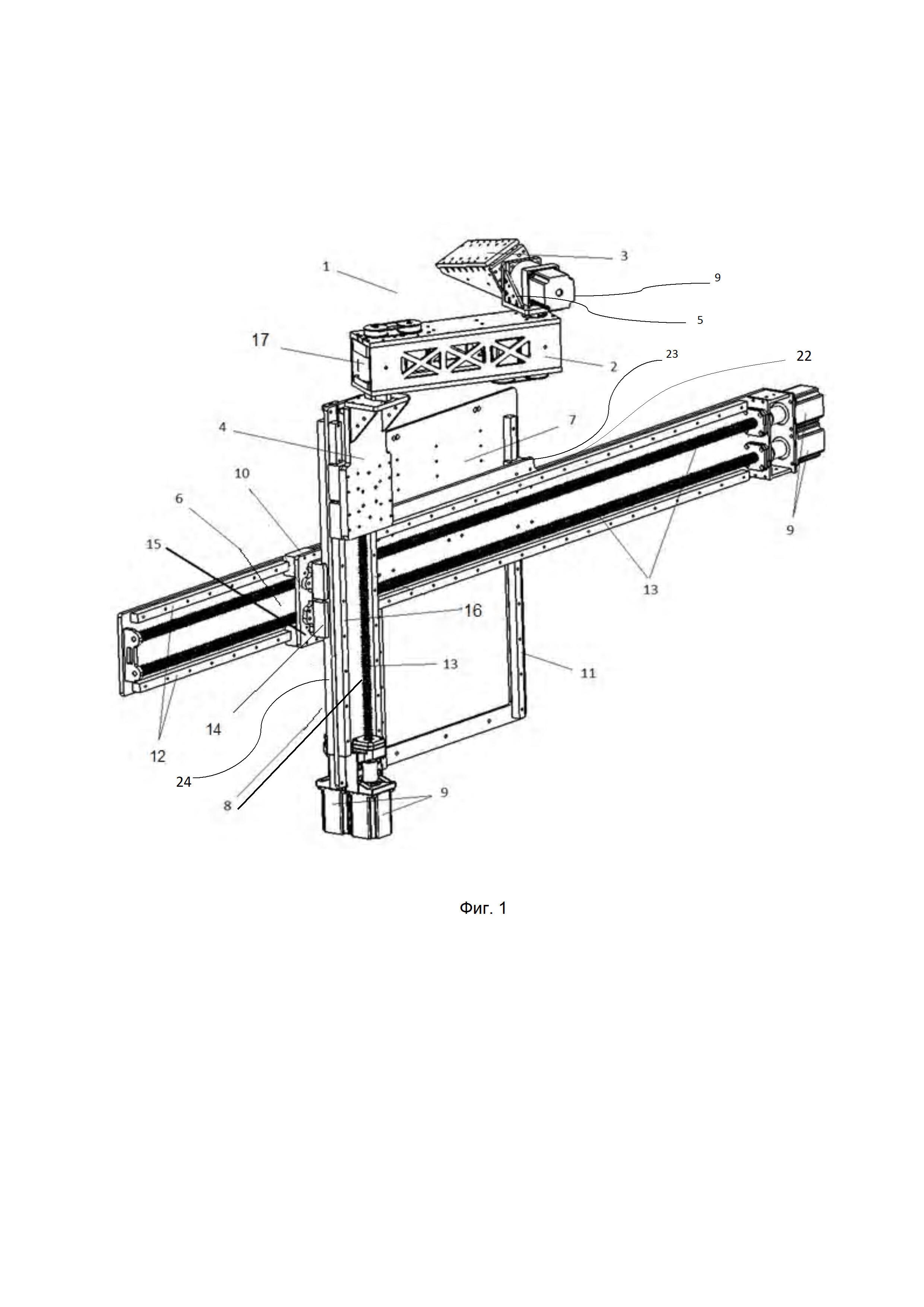
[018] Фиг. 2 иллюстрирует общий вид сборки системы позиционирования манипуляторов в режиме хранения.
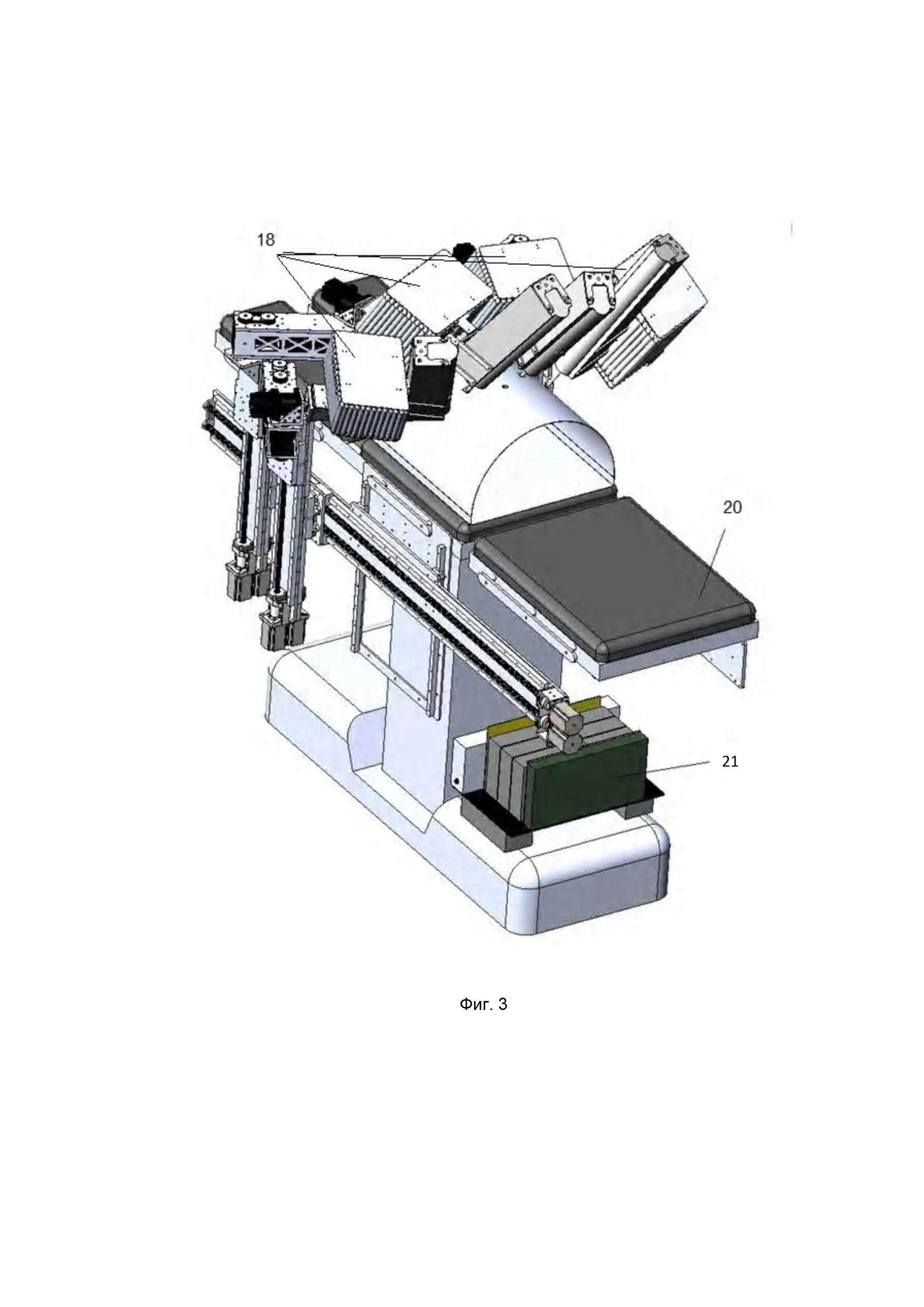
[019] Фиг. 3 иллюстрирует общий вид сборки системы позиционирования манипуляторов в рабочем положении.
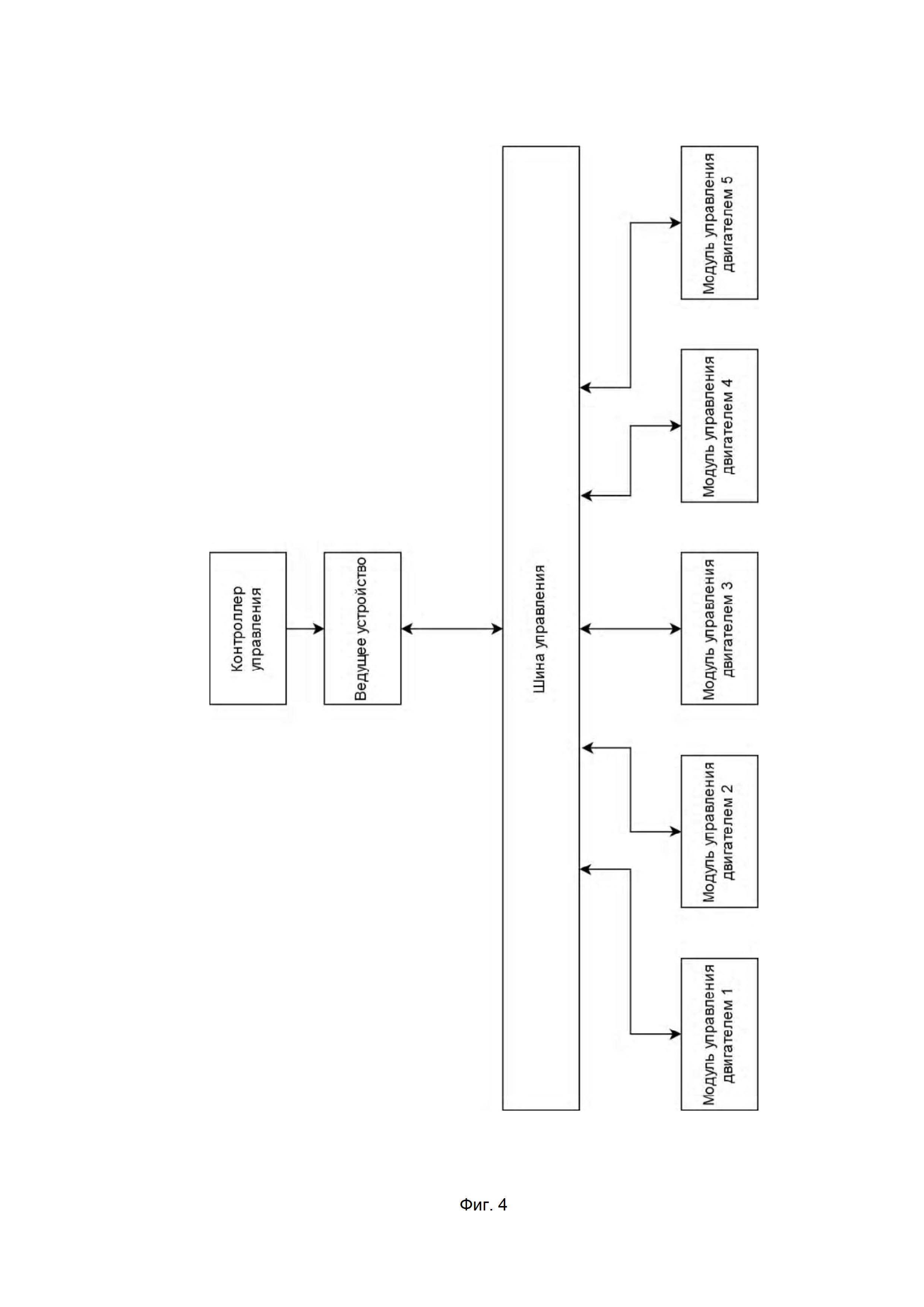
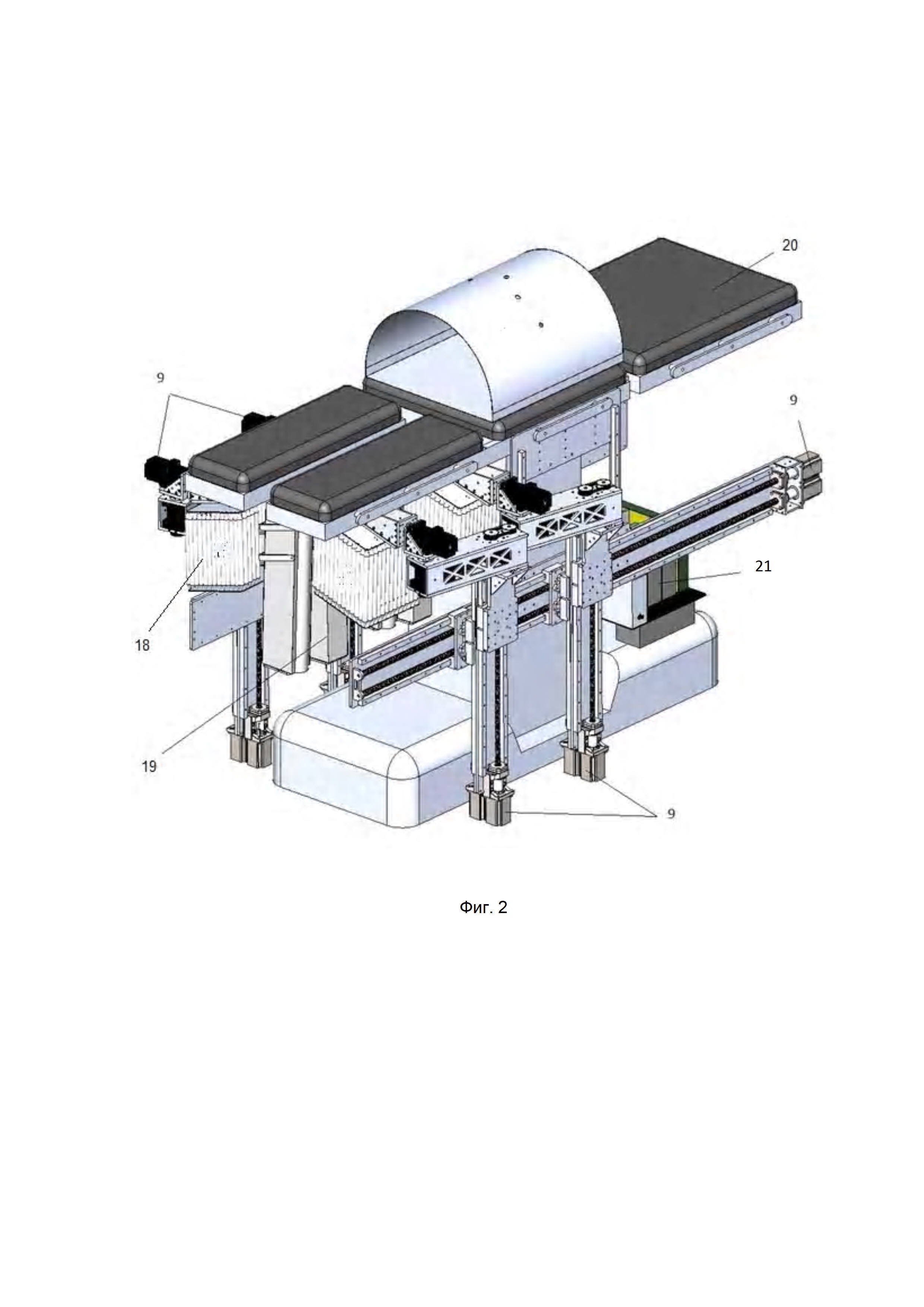
[020] Фиг. 4 иллюстрирует блок-схему управления сервоприводами системы позиционирования.
Термины и определения
[021] Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
[022] В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е. в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
[023] В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства. Робот-ассистивными системами при проведении операции управляют хирурги.
[024] В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
[025] В настоящей заявке под термином «оператор» понимают производящего операции врача хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
[026] Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
[027] Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Подробное описание изобретения
[028] Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей, и не предназначено для ограничения объема раскрываемого изобретения.
[029] Предложенное изобретение было реализовано в системе позиционирования манипуляторов, которая закрепляется за стандартные рельсы операционного хирургического стола. Предложенное изобретение позволяет переводить манипуляторы в рабочую зону – пространство, где выполняется хирургическая операция, а по ее завершению – переводить манипуляторы в зону хранения, расположенную под операционным столом в стороне, предусмотренной для расположения ног. Применение такого подхода к решению задачи дает возможность уменьшения занимаемой площади роботохирургической системы и дает возможность в автоматизированном режиме или в ручном режиме быстро выводить манипуляторы в рабочее положение и также быстро их убирать в зону хранения.
[030] Крепежный механизм (см Фиг. 1) системы позиционирования манипуляторов к хирургическому столу, в целом, представляет собой два фартука 7, каждый из которых имеет возможность крепиться к стороне хирургического стола съемным образом так, чтобы на противоположных сторонах стола было по одному фартуку 7 (дальнейшее описание конструкции системы идет в отношении одного из фартуков, при этом конструкция второго фартука и его систем идентична).
[031] В целом на одном фартуке 7 можно установить по меньшей мере одну гитару 6, а на ней по меньшей мере одну телескопическую вертикальную колону 8, на каждой из которых размещена своя рука позиционирования (механизм позиционирования 1) с закрепленным манипулятором (на чертеже не показан). На Фиг. 1 приведен пример с одной колонной 8 и соответственно с одной рукой позиционирования 1. Подробное описание вышеуказанных элементов приведено ниже.
[032] На фартуке 7 вертикально относительно стола закреплены направляющие 11, которые служат для вывода манипуляторов из зоны хранения в рабочую зону и вдоль которых вертикально перемещается горизонтальный элемент 6, который в дальнейшем в материалах заявки будет называться «гитара» 6.
[033] Гитара 6 с одной стороны прикрепляется к установочной платформе 22, а с другой стороны снабжена направляющими 12. Установочная платформа 22 соединена с соответствующими каретками 23, установленными на направляющих 11 фартука 7. Установочная платформа 22 может перемещаться по направляющим 11 фартука 7 под воздействием привода любого типа (электрический, гидравлический, пневматический и др.). Привод на фиг. 1 не показан. Направляющие 12 гитары 6 установлены на протяжении всей длины гитары 6.
[034] На гитаре 6 расположена по меньшей мере одна вертикальная колонна 8, которая выполнена с возможностью горизонтального перемещения вдоль гитары 6. Вертикальная колонна 8 представляет собой телескопическую двухкомпонентную стойку. Причем компоненты стойки идентичны и симметричны. Компонент, ориентированный в сторону гитары 6, является внутренней стороной вертикальной колонны 8, а компонент, ориентированный в сторону от хирургического стола, является лицевой стороной вертикальной колонны. Каждая сторона снабжена направляющими, простирающимися вдоль всей длины вертикальной колонны 8, и приводными механизмами в виде шарико-винтовой передачи 13 с приводом 9. На внутреннею сторону колонны 8 установлены направляющие 24, а на лицевую сторону колонны 8 установлены направляющие 16.
[035] Вертикальная колонна 8 соединена с гитарой 6 следующим образом. На направляющих 12 гитары 6 установлены каретки 10. На каретках 10 установлен соединительный модуль 15, выполняющий функцию перемещения системы позиционирования вдоль хирургического стола. Соединительный модуль 15 состоит из двух частей, которые между собой образуют надежное, жесткое быстросъемное соединение. Соединительный модуль 15 с одной стороны крепится на каретки 10, а с другой стороны соединительного модуля 15 на него крепятся каретки 14. Каретки 14 входят в направляющие 24, которые в свою очередь установлены на внутренней стороне вертикальной колонны 8. Вертикальная колонна 8 перемещается по горизонтали за одно целое с соединительным модулем 15 по направляющим 12 гитары 6 под воздействием приводного механизма, выполненного в виде привода 9 и шарико-винтовой передачи (ШВП) 13, расположенных на гитаре.
[036] На вертикальной колонне 8 закреплен посредством соединительного элемента 4 механизм позиционирования 1 на последовательной структуре, который состоит из двух консолей 2 и 5 и поворотной площадки 3 крепления и позиционирования манипулятора 18. Соединительный элемент 4 прикреплен через направляющие 16 на лицевой стороне колонны 8 таким образом, что образует кинематическую пару с механизмом позиционирования 1 на последовательной структуре. При этом в сочленении элемента 4 и консоли 2 находятся несколько независимых приводов с датчиками положения, а в сочленении консоли 2 и консоли 5 также находятся несколько независимых приводов с датчиками положения. Перечисленные приводы образуют блок приводов 17. В сочленении консоли 5 и площадки 3 также находится независимый привод с датчиками положения. Соединительный элемент 4, благодаря кареткам, имеет возможность совершать вертикальные поступательные движения вдоль направляющих 16 на лицевой стороне вертикальной колонны 8, а сама колонна 8 имеет возможность перемещаться вертикально вдоль соединительного модуля 15 по направляющим 24. Движения могут выполняться совместно или попеременно.
[037] Позиционирующий механизм 1 манипулятора осуществляет перемещение в плоскости хирургического стола, поворачиваясь относительно соединительного элемента 4. Поворотные консоли 2 и 5 выполнены с возможностью поворота в горизонтальной плоскости таким образом, чтобы консоль 2, находясь над поверхностью хирургического стола в рабочем положении, совершала полный оборот на 360 градусов и имела возможность ограниченного поворота под поверхностью стола в нерабочем состоянии. На указанной консоли 5 установлен узел крепления и позиционирования 3 манипулятора 18 с хирургическим инструментом, выполненный с возможностью поворота вокруг своей оси для приведения манипулятора 18 в рабочее положение.
[038] Приводные механизмы могут быть выполнены в виде любого известного механизма, обеспечивающего линейные перемещения и обеспечивающего сокращение потерь точности из-за люфтов. В предпочтительном варианте осуществления системы позиционирования манипуляторов за все описанные выше перемещения по направляющим отвечают шарико-винтовые передачи (ШВП) 13, которые приводят в движения сервомоторы 9, каждый из которых соединен со своей передачей.
[039] В качестве блока приводов 17 используется сервопривод в паре с любыми известными редукторами с нулевым механическим люфтом, например, безлюфтовые планетарные редукторы. Такие приводные механизмы, используемые на поворотных осях в конструкции механизма, обеспечивают высокую точность позиционирования манипуляторов.
[040] Совокупность движений всего механизма обеспечивает необходимое перемещение системы позиционирования по вертикальной плоскости боковой поверхности хирургического стола и осуществляет возврат манипуляторов в зону хранения.
[041] Преимущество такого исполнения состоит в обеспечении линейных движений по боковой поверхности хирургического стола, осуществлении необходимого для позиционирования манипулятора объёма движения и в создании конструкцией жесткого каркаса для достижения высокой точности. Такая компоновка линейных перемещений обеспечивает большой охват операционного поля, при этом имеет более компактный габаритный размер всего механизма позиционирования.
[042] Система работает следующим образом. В нерабочем положении манипуляторы 18 расположены (Фиг. 2) в зоне хранения 19 ниже уровня хирургического стола в ножной его части таким образом, чтобы не выступать за габариты столешницы 20 операционного хирургического стола и при этом не блокировать стандартные функции стола. Там же расположена система стерилизации хирургического инструмента (не показана на чертеже). После получения управляющего сигнала (Фиг. 4) блок приводов 17 поворотной консоли приводит в движение поворотные консоли 2 и 5, и манипуляторы 18, поворачиваясь на заданный угол, выводятся из-под стола. Затем сервомоторы 9 вертикальных колонн (стоек) 8 поднимают манипуляторы над уровнем хирургического стола, а сервомоторы 9 гитары 6 перемещают их в требуемую область. После чего сервомоторы 9 поворотных консолей 2 и 5 поворачивают манипуляторы 18 в рабочее положение (Фиг. 3) над хирургическим столом, при этом манипуляторы 18 располагают таким образом, чтобы обеспечить максимально удобное пространство для работы хирурга.
[043] В процессе проведения операции по команде хирурга система позволяет поворачивать/доворачивать манипулятор 18 на необходимый угол, если при проведении операции угла поворота хирургического инструмента недостаточно. После завершения хирургической операции или по команде хирурга, в короткое время, система способна в автоматическом режиме перейти в зону хранения, в случае если потребуется продолжить операцию как полостную.
[044] При этом перемещение манипуляторов будет происходить по траектории удаления от систем жизнеобеспечения пациента. Система позиционирования наравне с автоматическим имеет и ручной привод управления, выполненный в виде джойстика, имеющего проводное или, в отдельных случаях, беспроводное соединение с системой.
[045] Центральный блок управления 21 системой позиционирования 1 совместно с блоком управления роботохирургического комплекса в целом запоминает заданные положения манипуляторов и, при необходимости, по команде может вывести манипуляторы в данные положения.
[046] Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. В тоже время очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
Тензоплатформа для роботохирургического комплекса
Контроллер кисти для использования в контроллере оператора роботохирургического комплекса
Контроллер запястья для использования в контроллере оператора роботохирургического комплекса
Контроллер оператора для управления роботохирургическим комплексом
Ассистирующий хирургический комплекс
Способ управления камерой в роботохирургическом комплексе
Оценка усилия на роботохирургическом инструменте
Комбинированный манипулятор роботохирургического комплекса
Способ оценки подвижности тазового дна у женщин с использованием трехмерного моделирования
Привод для инструмента эндоскопического хирургического аппарата
Концевой эффектор эндоскопического хирургического аппарата
Способ динамической магнитно-резонансной диагностики пролапса тазовых органов
Способ эндоскопического лечения немышечно-инвазивного рака мочевого пузыря
Способ резекции почки
Привод для инструмента эндоскопического хирургического аппарата
Способ лечения рака предстательной железы
Способ диагностики рака предстательной железы
Концевой эффектор с шарнирным узлом и привод эндоскопического хирургического аппарата

