Результат интеллектуальной деятельности: СПОСОБ И КОНТРОЛЛЕР ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УСТРОЙСТВА ОЧИСТКИ В ПОЛОСТИ РТА ПОЛЬЗОВАТЕЛЯ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ОЧИСТКИ ПОЛОСТИ РТА, А ТАКЖЕ УСТРОЙСТВО ДЛЯ ПРИЕМА ИНФОРМАЦИИ
Вид РИД
Изобретение
Область техники
Настоящее изобретение направлено в целом на способы и системы для определения местонахождения устройства для очистки полости рта, и отслеживания перемещения устройства для очистки полости рта, использующие вход пространственного датчика.
Уровень техники
Надлежащая техника чистки зубов, включающая в себя линейную чистку и чистку по поверхности, помогает обеспечивать долговременное здоровье зубов. Многие зубные проблемы возникают у людей, которые или чистят зубы нерегулярно, или делают это ненадлежащим образом. Среди людей, которые чистят зубы регулярно, неправильные привычки при чистке могут привести к низкому охвату чисткой и, таким образом, к поверхностям, почищенным ненадлежащим образом.
Для способствования надлежащей технике чистки разработаны зубные щетки с обеспечением функции таймера, чтобы пользователь знал, что требуется чистить в течение минимального рекомендованного времени. Функция таймера может включать в себя слышимый звук, тактильную обратную связь или другой уведомляющий механизм для предоставления пользователю знания о том, когда заданное время истекло. Это обеспечивает пользователю указание, что он уже почистил зубы в течение надлежащего времени.
Другой механизм, способствующий надлежащей технике чистки, состоит в обеспечении надлежащей очистки всех зубных поверхностей, включающих в себя области рта, которые являются сложными для доступа, или которые имеют склонность ненадлежаще очищаться в течении усредненного сеанса чистки. Один путь для обеспечения надлежащего охвата состоит в отслеживании местоположения зубной щетки в полости рта во время сеанса чистки и сравнение его с картой зубных поверхностей. Например, система с датчиками, расположенными в фиксированном соотношении относительно зубов пользователя, может отслеживать перемещение зубной щетки по зубам пользователя.
Альтернативно, зубная щетка может включать в себя один или более внутренних датчиков, которые пытаются отслеживать перемещение устройства в полости рта. В такой системе пользователь начинает чистку при помощи зубной щетки в известном, фиксированном положении в полости рта, и последующее перемещение щетки определяется по одному или более внутренним датчикам. Однако этот метод имеет некоторые ограничения. Пользователи не имеют возможности перемещать свою голову при чистке, поскольку это препятствует надлежащему расположению места исходной неподвижной системы отсчета. Система путается между некоторыми участками рта, где данные аналогичны, например, вверху слева внутри рта и вверху справа снаружи рта. Разрешение системы является низким, что означает, что могут отслеживаться только широкие секции рта, а не более конкретное место, например, зубы.
Патентный документ GB 2519579 А описывает устройство для отслеживания для использования при чистке зубов. Обучающее устройство нацелено на то, чтобы помочь детям выработать хорошую технику чистки. Устройство обеспечивает обратную связь в режиме реального времени для отслеживания сеанса чистки для уверенности в том, что все зубы почищены в течение правильного времени чистки.
Патентный документ WO 2014/202250 A1 описывает систему электрической зубной щетки для контроля чистки и соответствия режиму чистки зубов. Система записывает действия по чистке зубов, выполняет анализ и предоставляет обратную связь пользователю на основании его чистящих действий и того, как они соответствуют опорным данным.
Соответственно, в уровне техники продолжает существовать необходимость в способе отслеживания перемещения зубной щетки в полости рта с использованием входа пространственного датчика, не требуя точной информации об исходном положении.
Сущность изобретения
Настоящее раскрытие направлено на изобретательские способы и системы для отслеживания перемещения устройства для очистки полости рта в полости рта. Будучи примененными к системе, выполненной с возможностью локализации устройства для очистки полости рта в полости рта, изобретательские способы и системы обеспечивают возможность большей точности отслеживания и, таким образом, обеспечения оценки техники чистки пользователя. Способ использует вероятностную графическую модель для отслеживания перемещения устройства для очистки полости рта в полости рта. Эта вероятностная графическая модель использует вероятностные входные данные для создания наилучшей оценки для текущего состояния, при этом распределение вероятности текущего состояния вычисляется из распределения вероятности предыдущего состояния и вероятностей перехода из одного состояния в любое другое состояние, как обнаружено датчиками движения. Система отслеживает состояния и переходы в течении сеанса чистки, и использует эту информацию для обеспечения оценки техники чистки.
В целом в одном аспекте обеспечивается способ для определения местонахождения устройства для очистки полости рта в полости рта пользователя. Способ включает в себя этапы, на которых: (i) обеспечивают устройство для очистки полости рта, имеющее идентификатор движения; (ii) оценивают, на основании информации датчика, полученной от идентификатора движения, вероятность первого местонахождения устройства для очистки полости рта в полости рта пользователя; (iii) принимают информацию от идентификатора движения, касающуюся законченного перехода во второе состояние в полости рта пользователя; (iv) сравнивают законченный переход с заданным набором возможных переходов между каждым из множества возможных состояний в полости рта пользователя для определения вероятности перехода; и (v) определяют, используя вероятностную графическую модель, содержащую вероятность первого местонахождения и вероятность перехода, вероятность местонахождения второго состояния.
Согласно варианту осуществления этап определения вероятности местонахождения второго состояния содержит вероятностную графическую модель, использующую вероятность первого местонахождения, вероятность перехода и вероятность текущего состояния.
Согласно варианту осуществления способ дополнительно включает в себя этап обеспечения калибровочных данных для устройства для очистки полости рта, при этом этап оценки основывается на информации датчика, полученной от идентификатора движения, и на калибровочных данных.
Согласно варианту осуществления вероятностная графическая модель представляет собой скрытую Марковскую модель.
Согласно варианту осуществления вероятность местонахождения второго состояния определяется посредством умножения вероятности каждого перехода в заданном наборе возможных переходов на вероятность появления устройства для очистки полости рта в каждом из множества возможных состояний в полости рта пользователя.
Согласно варианту осуществления способ дополнительно включает в себя этап корректировки определения предыдущего состояния на основании вероятности следующего перехода.
Согласно варианту осуществления способ дополнительно включает в себя этап определения личности пользователя на основании схемы из двух или трех состояний и/или переходов во время сеанса чистки.
Согласно варианту осуществления способ дополнительно включает в себя этап оценки сеанса чистки с использованием определений состояний.
Согласно аспекту обеспечивается устройство для очистки полости рта. Устройство для очистки полости рта включает в себя идентификатор движения и контроллер в соединении с идентификатором движения, при этом контроллер выполнен с возможностью: (i) оценивать, на основании информации датчика, принятой от идентификатора движения, вероятность первого местонахождения устройства для очистки полости рта в полости рта пользователя; (ii) принимать информацию от идентификатора движения, касающуюся законченного перехода во второе состояние в полости рта пользователя; (iii) сравнивать законченный переход с заданным набором возможных переходов между каждым из множества возможных состояний в полости рта пользователя для определения вероятности перехода; и (iv) определять, используя вероятностную графическую модель, содержащую вероятность первого местонахождения и вероятность перехода, вероятность местонахождения второго состояния.
Согласно варианту осуществления контроллер дополнительно выполнен с возможностью передачи местонахождения определенного состояния.
Согласно аспекту обеспечивается система для очистки полости рта. Система включает в себя устройство для очистки полости рта, имеющее идентификатор движения и модуль связи, при этом устройство для очистки полости рта выполнено с возможностью передачи, посредством коммуникационного модуля, данных датчика от идентификатора движения об одном или более завершенных переходах устройства для очистки полости рта в полости рта пользователя. Система также включает в себя устройство в соединении с устройством для очистки полости рта и содержащее процессор, при этом процессор выполнен с возможностью: (i) оценивать, на основании принятой информации датчика, вероятности первого местонахождения устройства для очистки полости рта в полости рта пользователя; (ii) принимать информацию от идентификатора движения, касающуюся завершенного перехода во второе состояние в полости рта пользователя; (iii) сравнивать завершенный переход с заданным набором возможных переходов между каждым из множества возможных состояний в полости рта пользователя для определения вероятности перехода; и (iv) определять, используя вероятностную графическую модель, содержащую вероятность первого местонахождения и вероятность перехода, вероятность местонахождения второго состояния.
Согласно аспекту обеспечивается способ для определения местонахождения устройства для очистки полости рта в полости рта пользователя. Способ включает в себя этапы, на которых: (i) обеспечивают устройство для очистки полости рта, имеющее идентификатор движения; (ii) определяют, что устройство для очистки полости рта расположено в первом местонахождении в полости рта пользователя; (iii) принимают информацию от идентификатора движения, касающуюся завершенного перехода во второе состояние в полости рта пользователя; (iv) сравнивают завершенный переход с заданным набором возможных переходов между каждым из множества возможных состояний в полости рта пользователя для определения вероятности перехода; и (v) определяют, используя вероятностную графическую модель, содержащую первое местонахождение и вероятность перехода, вероятность местонахождения второго состояния.
Следует принять во внимание, что все сочетания вышеупомянутых концепций и дополнительных концепций, более подробно раскрытые ниже (при условии, что такие концепции не являются взаимно исключающими), рассматриваются как часть объекта изобретения, раскрытого в настоящем документе. В частности, все сочетания заявленного объекта изобретения, появляющиеся в конце настоящего раскрытия, рассматриваются как часть объекта изобретения, рассмотренного в настоящем документе.
Эти и другие аспекты изобретения станут очевидны из и объяснены со ссылкой на вариант(ы) осуществления, описанные в настоящем документе.
Краткое описание чертежей
На чертежах подобные номера ссылочных позиций в целом относятся к одним и тем же частям на всех различных видах. Также чертежи необязательно выполнены в масштабе, вместо этого упор сделан в целом на иллюстрацию принципов изобретения. На чертежах:
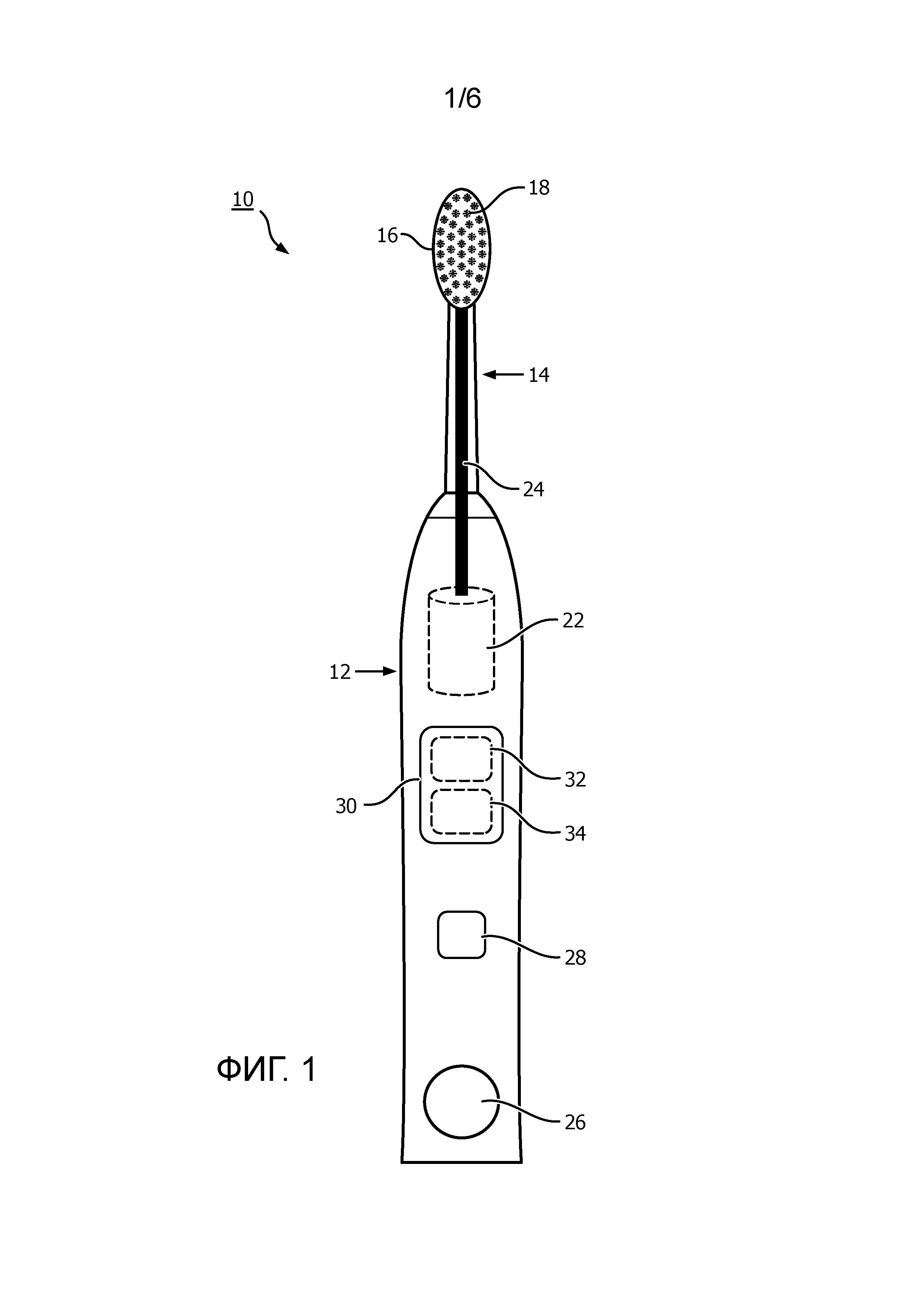
Фиг. 1 - изображение устройства для очистки полости рта согласно варианту осуществления.
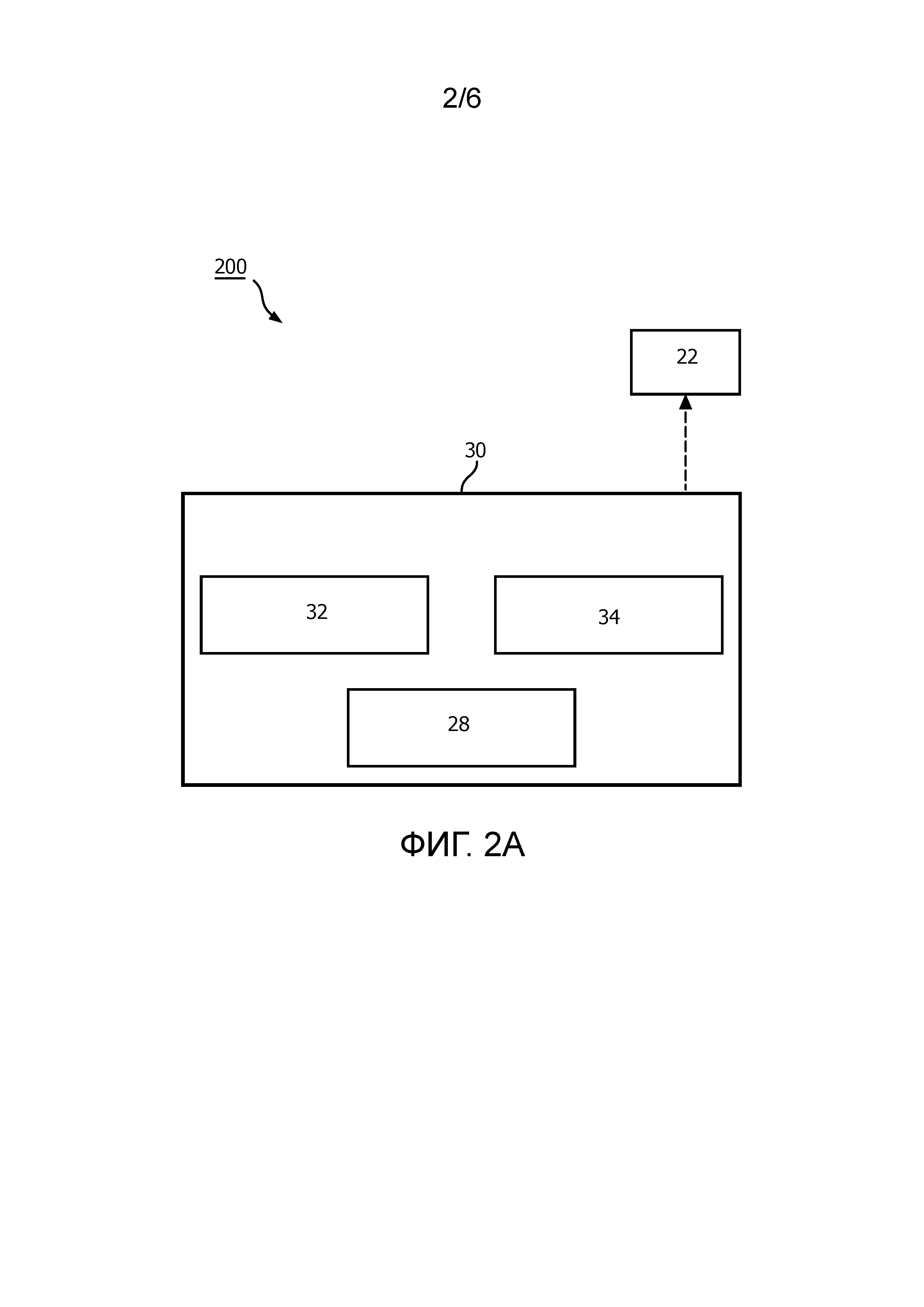
Фиг. 2A - схематическое изображение системы управления устройства для очистки полости рта согласно варианту осуществления.
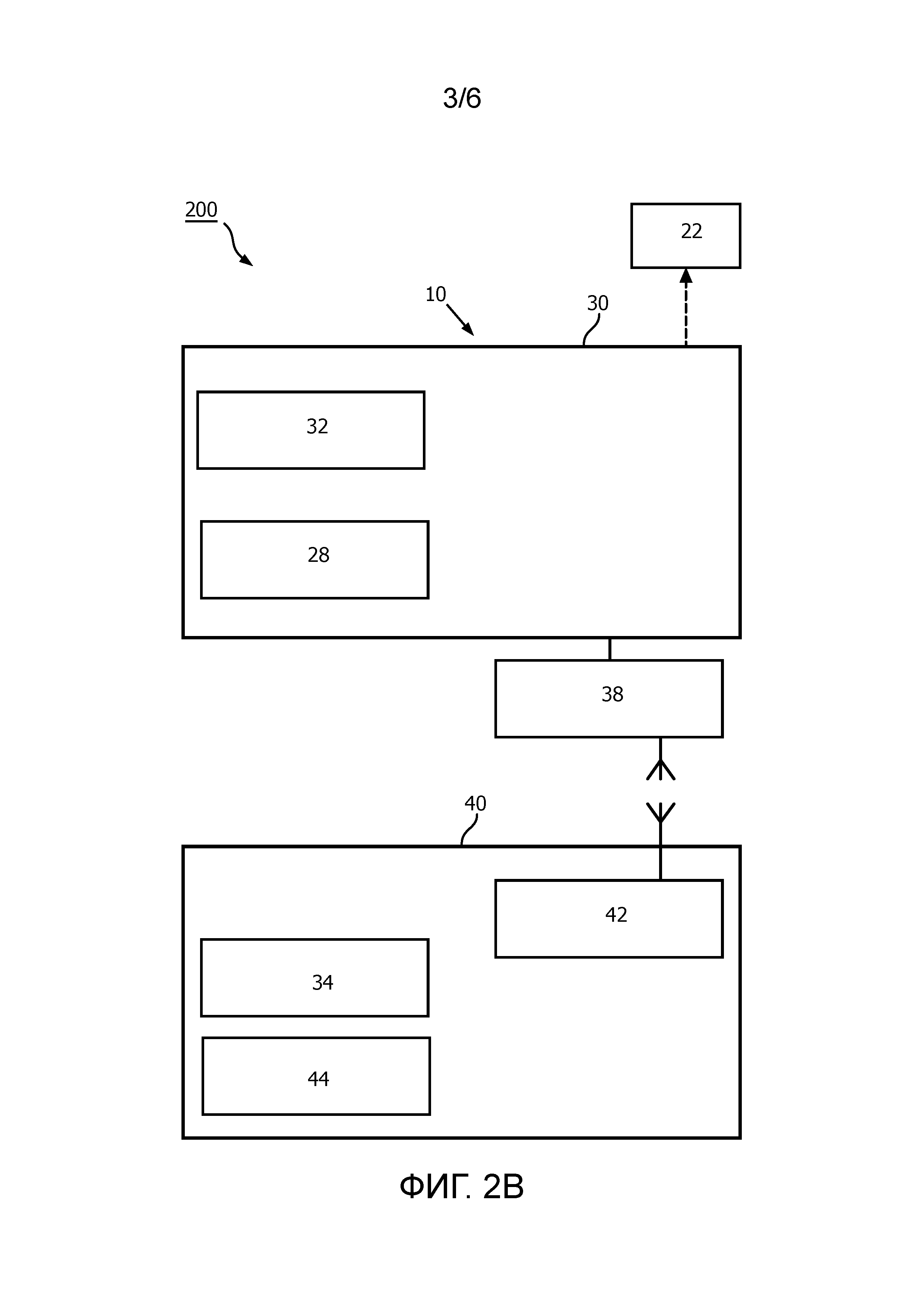
Фиг. 2B - схематическое изображение системы управления устройства для очистки полости рта согласно варианту осуществления.
Фиг. 3 - блок-схема, показывающая способ для отслеживания перемещения устройства в фиксированном пространстве, с использованием входных данных пространственного датчика согласно варианту осуществления.
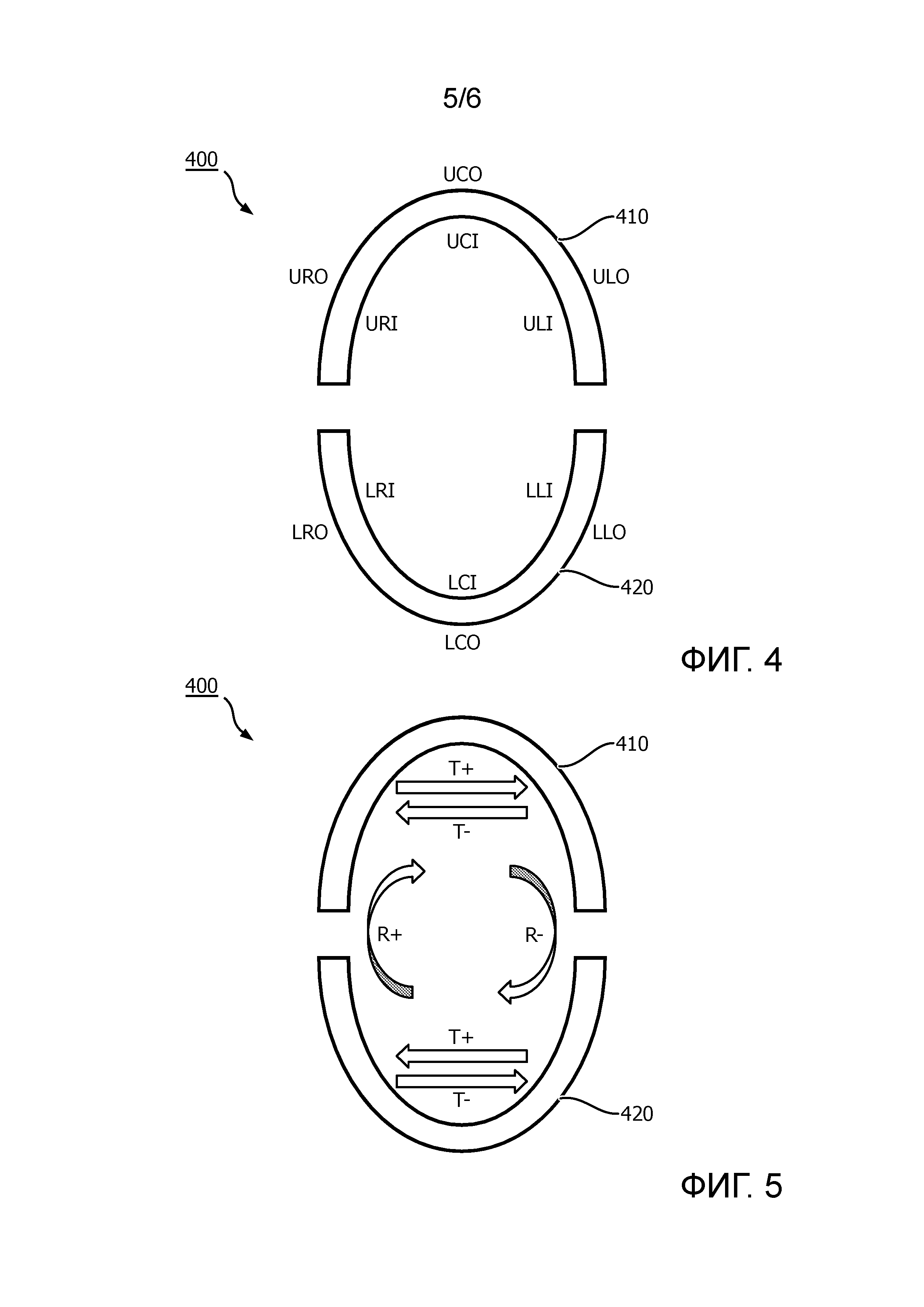
Фиг. 4 - схематическое изображение различных состояний в полости рта согласно варианту осуществления.
Фиг. 5 - схематическое изображение переходов между различными состояниями в полости рта согласно варианту осуществления.
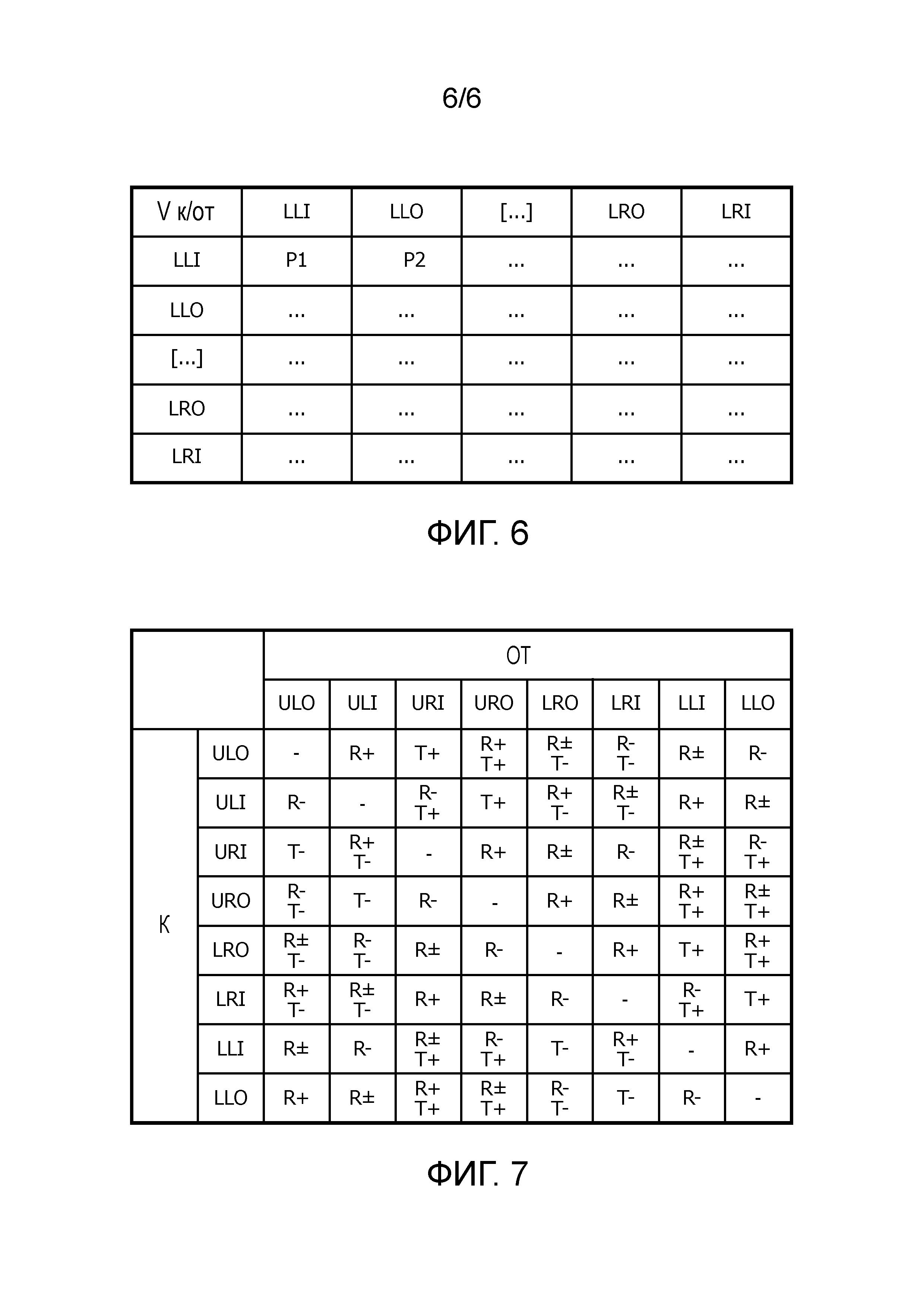
Фиг. 6 - таблица вероятностей переходов согласно варианту осуществления.
Фиг. 7 - таблица переходов между различными состояниями в полости рта согласно варианту осуществления.
Подробное описание вариантов осуществления изобретения
Настоящее раскрытие описывает различные варианты осуществления способа и контроллера для отслеживания перемещения устройства для очистки полости рта в полости рта. В более общем смысле заявитель признал и принял во внимание, что было бы выгодно обеспечить систему для отслеживания перемещения устройства для очистки полости рта в полости рта для обеспечения оценки техники чистки пользователя. Соответственно, способы, описанные или предусмотренные иным образом в настоящем документе, обеспечивают устройство для очистки полости рта, выполненное с возможностью определения положения устройства для очистки полости рта в полости рта пользователя и определения, наряду с другими параметрами, насколько долго пользователь чистит отдельные места в полости рта. Согласно варианту осуществления указанный способ использует вероятностную графическую модель для отслеживания перемещения устройства для очистки полости рта в полости рта. Эта вероятностная графическая модель использует вероятностные входные данные для создания наилучшей оценки текущего состояния, при этом распределение вероятности текущего состояния вычисляется из распределения вероятности предыдущего состояния и вероятностей перехода из одного состояния в любое другое состояние, обнаруженное датчиками движения.
Особенная цель использования вариантов осуществления и воплощений, изложенных в настоящем документе, состоит в предоставлении информации о чистке с использованием устройства для очистки полости рта, например, электрической зубной щетки.
На фиг. 1, в одном варианте осуществления обеспечивается устройство 10 для очистки полости рта, включающее в себя основной участок 12 и элемент 14 чистящей головки, установленный на основном участке. Элемент 14 чистящей головки включает в себя на своем конце, дальнем от основного участка, чистящую головку 16. Чистящая головка 16 включает в себя щетиночную поверхность 18, которая обеспечивает множество щетинок. Согласно варианту осуществления щетинки проходят вдоль оси, по существу перпендикулярной продольной оси головки, хотя возможны многие другие варианты осуществления чистящей головки и щетинок.
Согласно варианту осуществления элемент 14 чистящей головки установлен с возможностью перемещения относительно основного участка 12. Перемещение может представлять собой любое из множества различных перемещений, включающих в себя, наряду с другими, вибрации или поворот.
Согласно варианту осуществления основной участок 12 включает в себя цепь 22 привода для создания перемещения, и передаточный компонент 24 для передачи созданных перемещений элементу 14 чистящей головки. Например, цепь 22 привода может содержать двигатель или электромагнит(ы), который генерирует перемещение передаточного компонента 24, которое затем передается элементу 14 чистящей головки. Цепь 22 привода может включать в себя компоненты, например, помимо других компонентов, блок питания, генератор колебаний и один или более электромагнитов.
Хотя в настоящем варианте осуществления устройство 10 для очистки полости рта представляет собой электрическую зубную щетку, следует понимать, что в альтернативном варианте осуществления устройство для очистки полости рта представляет собой ручную зубную щетку (не представлено). В такой конструкции ручная зубная щетка имеет электрические компоненты, но чистящая головка не приводится в действие механически электрическим компонентом.
Основной участок 12 дополнительно снабжен пользовательским входом 26 для приведения в действие и отключения генератора 22 перемещения. Пользовательский вход 26 обеспечивает пользователю возможность оперировать устройством 10 для очистки полости рта, например, включать и отключать устройство 10 для очистки полости рта. Пользовательский вход 26 может, например, представлять собой кнопку, сенсорный экран или переключатель.
Устройство 10 для очистки полости рта включает в себя один или более идентификаторов 28 движения. Идентификатор 28 движения представлен на фиг. 1 в основном участке 12, но может располагаться в любом месте в устройстве, включая, например, расположение в элементе 14 чистящей головки или чистящей головке 16. Идентификаторы 28 движения содержат, например, 6-осную или 9-осную пространственную систему датчиков. Например, идентификатор 28 движения выполнен с возможностью обеспечения показаний шести осей относительного движения (три оси поступательного движения и три оси поворота), с использованием, например, 3-осного гироскопа и 3-осного акселерометра. В качестве другого примера идентификатор 28 движения выполнен для обеспечения показаний девяти осей относительного движения с использованием, например, 3-осного гироскопа, 3-осного акселерометра и 3-осного магнитометра. Могут использоваться другие датчики или самостоятельно или вместе с этими датчиками, включающими в себя, без ограничения, датчик давления и другие типы датчиков. Для определения состояния и/или перемещения устройства могут использоваться многие различные типы датчиков, как описано или иным образом предусмотрено в настоящем документе.
Идентификатор 28 движения помещен в заданном положении и с заданной ориентацией в устройство 10 для очистки полости рта. Таким образом, ориентация и местоположение элемента 14 чистящей головки может быть легко определено на основании известной ориентации и местоположения идентификатора 28 движения. Соответственно, элемент 14 чистящей головки находится в неподвижной пространственной относительной конфигурации с идентификатором 28 движения.
Идентификатор 28 движения выполнен с возможностью генерирования информации, указывающей ускорение и угловую ориентацию устройства 10 для очистки полости рта. Система датчиков может содержать два или более идентификаторов 28 движения, функционирующих вместе как 6-осная или 9-осная пространственная система датчиков. Согласно другому варианту осуществления встроенный 9-осный пространственный датчик может обеспечивать экономию пространства в устройстве 10 для очистки полости рта.
Информация, генерированная первым идентификатором 28 движения, предоставляется контроллеру 30 устройства. Контроллер 30 может содержать процессор 32 и память 34. Процессор 32 может принимать любой подходящий вид. Например, процессор 32 может представлять собой или включать в себя микроконтроллер, множество микроконтроллеров, схему, один процессор или множество процессоров. Контроллер 30 может быть образован из одного или множества модулей, и выполнен с возможностью управлять устройством 10 для очистки полости рта в ответ на ввод, например, пользовательский вход 26. Например, контроллер 30 может быть выполнен с возможностью приведения в действие блока управления двигателем. Согласно варианту осуществления идентификатор 28 движения составляет единое целое с контроллером 30.
Память 34 может принимать любой подходящий вид, включающий в себя энергонезависимую память и/иди RAM. Энергонезависимая память может включать в себя память только для чтения (ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память может хранить, помимо прочего, операционную систему. RAM используется процессором для временного хранения данных. Операционная система может содержать код, который, при выполнении контроллером 30 управляет работой каждого из аппаратных компонентов устройства 10 для очистки полости рта.
На фиг. 2A обеспечивается вариант осуществления системы 200 для очистки полости рта. Согласно варианту осуществления система 200 для очистки полости рта включает в себя один или более идентификаторов 28 движения и контроллер 30, содержащий процессор 32 и память 34. При использовании с электрическими очищающими устройствами система 200 для очистки полости рта включает в себя цепь 22 привода, работа которой управляется контроллером 30.
Согласно варианту осуществления контроллер 30 использует информацию от идентификатора 28 движения для определения и отслеживания местоположения устройства 10 для очистки полости рта, когда пользователь перемещает устройство по полости рта. Контроллер запрограммирован или выполнен с возможностью применения вероятностной графической модели, например, скрытой Марковской модели (ʺHMMʺ) или любой другой вероятностной графической модели или гибридного способа, для оценки местонахождения устройства 10 для очистки полости рта по информации пространственного датчика, полученной от идентификатора 28 движения. Местоположения в полости рта имеют определенные обозначения, и каждое из этих обозначений может рассматриваться как отдельное местоположение элемента чистящей головки устройства 10 для очистки полости рта в полости рта. Например, приблизительное местоположение чистящей головки в полости рта называется состоянием. Хотя согласно некоторым вариантам осуществления указанное состояние может представлять собой точное местоположение чистящей головки на зубе, или, точнее говоря, на определенной части зуба, состояние может представлять собой, в более широком смысле, участок рта, например, верхний левый наружный, верхний левый внутренний и другие (см. Таблицу 1). Когда пользователь переходит между различными состояниями в полости рта, информация о перемещении генерируется идентификатором 28 движения и посылается на контроллер 30. Вероятностная графическая модель создает наилучшую оценку текущего состояния, при этом распределение вероятности текущего состояния вычисляется из распределения вероятности предыдущего состояния и вероятностей перехода из одного состояния в любое другое состояние, как обнаружено идентификатором 28 движения. Таким образом, наиболее вероятное местонахождение устройства в данном пространстве определяется на основании распределения вероятностей предыдущего состояния, объединенных с распределением вероятностей перехода, при этом распределения представляют собой одну или более матриц, которые содержат информацию о вероятности переходов между состояниями. Могут применяться многочисленные матрицы перемещения, включающие в себя, например, статистическую матрицу, содержащую информацию о поведении, например, какова вероятность перемещения, на основании калибровки пользователем, и матрицу, содержащую вероятность того, что произошел переход, на основании показаний датчиков, и/или матрицу, содержащую вероятность того, что произошел переход, на основании предыдущих знаний системы.
На фиг. 2B представлен другой вариант осуществления системы 200 для очистки полости рта, содержащей устройство 10 для очистки полости рта и устройство 40, которое является отдельным от устройства для очистки полости рта. Устройство 10 для очистки полости рта может представлять собой любой из вариантов осуществления устройства для очистки полости рта, раскрытых или иным образом предусмотренных в настоящем документе. Согласно варианту осуществления устройство 10 для очистки полости рта включает в себя один или более идентификаторов 28 движения для информации пространственных датчиков, и контроллер 30, содержащий процессор 32. Устройство 10 для очистки полости рта может включать в себя цепь 22 привода, работа которой управляется контроллером 30.
Согласно варианту осуществления устройство 10 для очистки полости рта дополнительно содержит модуль 38 связи, передающий собранную информацию пространственных датчиков. Модуль связи может представлять собой любой модуль, устройство или средство, обладающее способностью передавать проводной или беспроводной сигнал, включающий в себя, без ограничения, Wi-Fi, Bluetooth, связь в ближнем поле и/или сотовый модуль.
Согласно варианту осуществления устройство 40 может представлять собой любое устройство, выполненное с возможностью или обладающее способностью принимать и обрабатывать информацию пространственных датчиков, переданную от устройства 10 для очистки полости рта. Например, устройство 40 может представлять собой держатель очищающего устройств или станцию, смартфон, компьютер, сервер или любое другое компьютеризированное устройство. Согласно варианту осуществления устройство 40 включает в себя модуль 42 связи, который может представлять собой любой модуль, устройство или средство, обладающее способностью принимать проводной или беспроводной сигнал, включающее в себя, без ограничения, Wi-Fi, Bluetooth, связь в ближнем поле и/или сотовый модуль. Устройство 40 также включает в себя процессор 44, который использует полученную информацию пространственных датчиков от идентификатора 28 движения для определения и отслеживания положения устройства 10 для очистки полости рта, когда пользователь передвигает устройство по рту, как описано в настоящем документе. Согласно одному варианту осуществления устройство 40 может включать в себя память 34 для хранения калибровочных данных, принятой информации пространственных датчиков или любой другой информации.
В качестве только одного примера устройство 10 для очистки полости рта может собирать информацию датчика, используя идентификатор 28 движения, и передавать эту информацию локально через Bluetooth-соединение на смартфон-устройство 40, при этом информация датчика обрабатывается и/или сохраняется. В качестве другого примера устройство 10 для очистки полости рта может собирать информацию датчика, используя идентификатор 28 движения, и передавать эту информацию через WiFi-соединение в Интернет, где она передается на удаленное серверное устройство 40. Удаленное серверное устройство 40 обрабатывает и/или сохраняет информацию датчика. Пользователь может иметь доступ к этой информации непосредственно или может получать отчеты, обновления или другую информацию от удаленного серверного устройства 40 или связанного устройства.
На фиг. 3 в одном варианте осуществления представлена блок-схема способа 300 отслеживания перемещения устройства в данном пространстве. На этапе 310 способа обеспечивается устройство 10 для очистки полости рта. Устройство для очистки полости рта может представлять собой любой из вариантов осуществления, описанных или иным образом предусмотренных в настоящем документе.
На необязательном этапе 320 способа устройство 10 для очистки полости рта может калиброваться. Калибровка может содержать, например, определение положений и/или переходов в системе, что может быть сделано при изготовлении или выполнен пользователем. Данные калибровки состояния состоят из аннотированных наборов данных датчика. Во время сеанса калибровки, например, обозначенная область подвергается чистке и текущие данные датчика аннотируются и сохраняются.
Согласно варианту осуществления калибровка выполняется индивидуальным пользователем. Она может быть выполнена несколькими способами. Например, пользователь может просто использовать устройство, и система может реконструировать карту челюсти посредством регистрации форм и состояния границ, например, точку поворота на задних молярах. Согласно другому способу калибровки пользователем пользователю даются указания на протяжении сеанса чистки, в котором указано, где ему следует чистить, так что система может сопоставить местонахождение с данными датчика, а также обучить систему закономерностям движения пользователя (например, быстрые или медленные переходы).
Согласно варианту осуществления этап калибровки опускается. Вместо этого устройство для очистки полости рта вырабатывает набор калибровочных данных по одному или более сеансам чистки посредством сравнения данных между этими сеансами. Может также использоваться способ самообучения для дополнения, исправления или регулирования иным образом фабричной или пользовательской калибровки.
На этапе 330 способа устройство для очистки полости рта располагается в полости рта в первом местонахождении, и пользователь начинает чистить зубы. Согласно одному варианту осуществления пользователь получает указания, где начинать чистку зубов, и, таким образом, способ пропускает этап 335 и переходит к этапу 340.
На этапе 335 способа система определяет вероятность первого состояния, используя вероятностную графическую модель. Согласно варианту осуществления модель определяет вероятность текущего состояния, используя вероятность предыдущего состояния, при этом вероятность текущего состояния основана на калибровочных данных, и вероятность перехода от предыдущего состояния к текущему состоянию, по формуле:
 (Уравнение 1)
(Уравнение 1)
где P(s) -матрица вероятности текущего состояния, P(s-1)- матрица вероятности предыдущего состояния, P(T) - матрица вероятности перехода из каждого состояния s-1 в состояние s, а P(scal) - матрица вероятности текущего состояния на основании калибровочных данных с этапа 320. Получившееся в результате распределение затем нормируется.
Однако при оценке первого положения в полости рта пользователя вероятность предыдущего местонахождения не существует. Соответственно, для оценки первого положения для определения местонахождения могут использоваться только калибровочные данные. Существует несколько способов оценки текущего состояния, и они более подробно рассмотрены ниже. Например, согласно варианту осуществления вероятность первого, неизвестного, состояния определяется на основании калибровочных данных, а последующие неизвестные состояния определяются с использованием уравнения  , или Уравнения 1.
, или Уравнения 1.
Согласно варианту осуществления матрица перехода T обеспечивает вероятность перехода из каждого возможного состояния к каждому другому возможному состоянию.
Матрица затем умножается на матрицу текущего состояния S. В указанном примере текущее состояние было точно известно на 100%, но это необязательно так. Текущее положение является, преимущественно, также неопределенным, приводя к тому, что у матрицы S есть распределение вероятности. Результат умножения вероятностей перехода на вероятности состояния дает нам матрицу вероятности нового состояния P. Из этой матрицы P может быть наиболее вероятно определено наиболее вероятное текущее состояние, и оно используется для предоставления обратной связи пользователю.
 (Уравнение 2)
(Уравнение 2)
Сама матрица перехода T может представлять собой результат перемножения вероятностей, и может также содержать вероятностную информацию о поведенческих моделях Например, невероятно, чтобы пользователь пропустил один зуб при чистке. Например, переход от зуба № 1 к зубу №3, полностью пропуская зуб № 2 между ними, маловероятно. Существует вероятность перехода между каждыми двумя зубами, которая может быть включена в матрицу перехода T. Эти поведенческие вероятности могут быть получены, например, посредством направленного сеанса калибровки, или данных, добытых из потребительских исследований.
Согласно варианту осуществления матрица перехода T содержит информацию о граничных условиях. Поскольку форма челюсти известна, граничные условия могут быть наложены на вычисления. Например, если система отслеживает абсолютное положение на челюсти и информация от индикатора движения означает, что новое положение располагается на пять сантиметров снаружи челюсти, это считается ничтожной вероятностью, поскольку оцененное местонахождение не попадает в границы системы. В этот момент отслеживание может считаться потерянным до тех пор, пока оцененное новое местонахождение не будет попадать снова в граничные условия системы, или второе положение, лежащее в границах системы, также имеет высокую вероятность быть верным местонахождением. Всякий раз, когда отслеживание теряется и находится вновь, промежуточная траектория может быть отслежена в обратном порядке от вновь найденного местоположения, используя вероятности перехода, которые существовали, когда отслеживание было потеряно.
Согласно варианту осуществления мгновенные значения датчика могут уже давать указание местонахождения, до учета вероятностей перехода. Каждое сочетание данных датчиков уже ограничивает вероятное положение. Например, когда щетка ориентирована внутрь, щетка располагается на наружной стороне челюсти, что исключает определенные состояния. Эти наблюдения могут также способствовать восстановлению потерянного отслеживания положения. Модель, которая соединяет состояния с мгновенными данными датчиков, может представлять собой данные, добытые на этапах калибровки или конечным пользователем или при разработке.
На этапе 340 способа происходит переход и его обнаружение с помощью информации от идентификатора 28 движения. Например, идентификатор движения может обнаружить поступательное перемещение от одной стороны рта к другой стороне, поворот изнутри рта к наружной части рта или и поступательное перемещение, и поворот. Гироскоп, акселерометр, магнитометр, датчик давления и/или другие датчики идентификатора 28 движения посылают информацию контроллеру 30 непрерывно или периодически, и изменения в этой информации могут интерпретироваться системой как переход, включающий в себя, без ограничения, поступательное перемещение, поворот и/или другие перемещения или переходы. Согласно варианту осуществления контроллер интерпретирует информацию от идентификатора 28 движения как переход на основании сравнения с калибровочными данными, сравнения с заданными или запрограммированными данными, и/или другими данными.
Как только переход завершен, контроллер 30 использует эту информацию для определения, на этапе 350 способа, нового местонахождения, или состояния, устройства 10 для очистки полости рта в полости рта. Соответственно, в отличие от предыдущих способов состояние определяется только после завершения перехода устройства из предыдущего состояния в текущее состояние. Для определения нового состояния контроллер сравнивает информацию о переходе от идентификатора 28 движения с калибровочными данными. Например, контроллер может определить, насколько хорошо новые данные сравниваются с калибровочными точками, и получают степень подобия. Как подробно описано ниже, существует множество способов выполнения этапа 350 посредством сравнения информации о переходе от идентификатора 28 движения с калибровочными данными, включающих в себя: (i) корреляцию гистограмм; (ii) анализ распределения плотности вероятности; и/или (iii) анализ методом "ближайшего соседа".
Для подхода к корреляции гистограмм строится нормированная гистограмма для одной или более осей и калибровочных данных и наблюдаемых текущих данных датчика от идентификатора 28 движения. Корреляция вычисляется посредством внутреннего произведения гистограмм, с помощью поэлементного умножения и затем суммирования. Набор данных с наиболее совпадающими точками данных обеспечит наибольшую сумму. При использовании множества осей общая оценка вычисляется посредством умножения результатов по отдельным осям.
Для анализа распределения плотности вероятности функция нормального распределения подгоняется под набор калибровочных данных, используя следующее уравнение:
 (Уравнение 3)
(Уравнение 3)
Текущее положение затем оценивается путем нахождения вероятности каждой отдельной точки наблюдаемых данных датчика в распределении плотности вероятности. Согласно варианту осуществления этот подход менее чувствителен, например, к возможным пробелам в калибровочных данных.
Некоторые наблюдения состояния ведут к неоднозначным результатам в определении местонахождения. Для дифференцировки этих состояний необходимо смотреть на переход(ы), которые привели к этому состоянию. Наиболее характерная характеристика перехода во рту может представлять собой, например, угловой переход между первым и вторым состоянием. Однако каждый переход соответствует только одному набору смещений (x, y и z). Таким образом, этих данных может быть недостаточно для построения нормального распределения вероятности для сравнения с калибровочным набором. Из-за небольшого числа точек данных может использоваться анализ методом "ближайшего соседа". Согласно варианту осуществления, когда наблюдается переход, система ищет пять ближайших (dx, dy, dz) соседних элементов калибровочного набора переходов, хотя в других вариантах осуществления может использоваться менее пяти или более пяти соседних элементов. Предпочтительно система ищет ряд соседних элементов, которые избегают равных вероятностей. Относительная вероятность каждого перехода определяется числом ближайших соседних элементов каждого участвующего кластера.
Таким образом, согласно варианту осуществления для анализа методом "ближайшего соседа" полученные путем наблюдения данные датчика от идентификатора 28 движения сравниваются с набором калибровочных данных на основе числа x ближайших соседей в многомерном пространстве. Расстояние между измеренной точкой - как определено с помощью наблюдаемых данных датчика от идентификатора 28 движения - и каждой калибровочной точкой вычисляется посредством взятия модуля разности между точками, представленными как два вектора в трехмерном пространстве:
( ) (Уравнение 4)
) (Уравнение 4)
Вероятность для каждого местоположения может затем вычисляться посредством назначения относительного числа ближайших соседей этому местоположению, используя, например, следующее уравнение, где n(общее) представляет собой общее число соседей, принимаемых в расчет:
P(s)= n(s)/n(общее) (Уравнение 5)
Согласно варианту осуществления состояния и переходы в зубной полости могут быть четко определены, в том числе, без ограничения, калибровочными данными. На фиг. 4, согласно варианту осуществления, определены состояния для рта. Рот 400 включает в себя верхние зубы 410 и нижние зубы 420 в состояниях, определенных в таблице 1. Переход представляет собой перемещение из любого одного из состояний в любое другое состояние. Некоторые переходы являются очевидными, при этом другие являются сомнительными, как более подробно изложено ниже. Кроме того, некоторые переходы более вероятны, а другие - менее вероятны, и эта информация может являться дополнительным компонентом анализа.
Таблица 1. Сокращенные обозначения состояний
|
На фиг. 5, согласно варианту осуществления, определены переходы между состояниями в полости рта. Рот 400 включает в себя верхние зубы 410 и нижние зубы 420 с переходами, определенным как положительное или отрицательное поступательное перемещение (ʺTʺ) и/или положительный или отрицательный поворот (ʺRʺ). Некоторые переходы включают только один тип движения (T или R), хотя другие перемещения включают в себя два типа движения (T и R).
Согласно варианту осуществления вероятность перемещения может быть визуализирована в виде таблицы, при этом наблюдаемый сигнал, например, набор накопленных изменений углов, обеспечивает правильность вероятности каждого возможного перехода. Это может быть сделано полностью вероятностным образом и/или на основании набора правил.
Вероятностный способ
Согласно варианту осуществления полностью вероятностный способ требует полного калибровочного набора данных датчика, который согласно варианту осуществления представляет собой угловой поворот. После обнаружения перехода поворот датчика до и после перемещения сравнивается с калиброванным угловым поворотом для каждого возможного перемещения посредством одного из вышеуказанных способов оценки состояния, результатом чего является таблица, представленная на фиг. 6. Для каждого состояния перемещения, указанного посредством "К"/"От", например, LLO (внизу слева снаружи) к LLI (внизу, слева внутри), например, существует вероятность P2, что возможный переход является истинным.
Способ на основе правил
Согласно варианту осуществления способ на основе правил существует на основании предварительного знания системы, при этом тип движения между каждым сегментом известен. Таблица выполнена для типа движения, который может быть определен, в данном случае, для левого и правого поступательных перемещений вправо и влево (T+/-), левого и правого поворотов (R+/-), и/или поворотов на 180°, как представлено на фиг. 7. Согласно варианту осуществления калибровочный набор может содержать только калибровочные данные (например, угловые повороты) для каждого типа движений.
Когда обнаружен переход, сигнатуры углового поворота сравниваются с имеющимися сигнатурами, в данном примере с использованием подхода способом ближайших соседей, для определения вероятности наблюдения такого движения. Эти нормированные вероятности присваиваются соответствующим положениям в таблице, в которых ожидается существование движения. Всем положениям, при которых движение не ожидается, присваивается обратная вероятности. Согласно варианту осуществления, это приводит к одной полной таблице для каждого возможного движения.
Например, при наблюдении положительного поворота R+ с вероятностью 0,6, каждому элементу в таблице, где имеется R+, присваивается вероятность 0,6. Всем другим элементам присваиваются (1-0,6), поскольку эта вероятность того, что истина что-то другое, когда не наблюдается R+.
Согласно варианту осуществления все таблицы затем перемножаются поэлементно для получения конечного распределения вероятности перехода. Когда перемещение не наблюдается, каждому элементу присваивают одно и то же значение (1/N), поэтому таблица не оказывает влияния на относительные вероятности в конце. Согласно варианту осуществления представление необязательно должно быть в виде отдельных таблиц. Оно также может быть выполнено с использованием библиотек, справочных таблиц или других способов.
Что касается Уравнения 1, представленного выше, вероятность нахождения в определенном состоянии, P(s), равна сумме вероятностей всех сочетаний, в которых исходным является любое другое состояние, P(s-1), и осуществляется переход в это конкретное местонахождение с вероятностью P(T). Для устранения неоднозначностей и достижения лучшей оценки, оценка умножается вновь на вероятность текущего состояния на основании калибровочных данных, P(scal).
Согласно варианту осуществления разрешение неоднозначности требует информации P(s-1) об исходной точке, информации P(T) о переходе, и информации P(scal) о конечной точке. Это происходит потому, что, например, для некоторых положений состояние, обнаруженное в зубной полости, может быть минимумом двумя различными состояниями. Например, ULO и URI могут быть неразличимы до тех пор, пока не произойдет переход, и даже после этого некоторые переходы могут быть неразличимы. Переход ULO к ULI или ULI к ULO, например, содержит поворот, но для системы может быть затруднительно определить точное расположение, по меньшей мере до тех пор, пока не будет введена асимметрия. Как только имеется различимый переход, вызванный асимметрией, система лишается неоднозначности. Как правило, система не только лишится неоднозначности, но сможет определить предыдущее состояние, которое ранее было неоднозначным.
На необязательном этапе 355 способа на фиг. 3 согласно варианту осуществления одно или более предыдущих определений состояния корректируются. Например, определение состояния может быть определено на этапе 350 способа, но последующий переход может указывать, что предыдущий переход состояния было неправильным. Например, последующий переход из неправильно определенного состояния может быть или невозможным, или маловероятным, что которое может запускать пересмотр и/или возможную коррекцию. Система может использовать один или более предыдущих переходов, наряду с самым последним переходом, для определения и корректировки неправильно определенного состояния.
Аналогично, система может определять текущее состояние и/или корректировать предыдущее состояние, если система вдруг перестает отслеживать состояние или переход, или не может идентифицировать состояние или переход. Например, система может определить, используя предыдущую информацию датчика, что он находится в гипотетическом состоянии S1, за которым следует неопределяемый переход T? к новому неопределяемому состоянию S?. Последующий известный переход T2 приводит к определенному состоянию S3, которое означает, что предыдущий неопределяемый переход T? к состоянию S?, должно быть, был переходом T1 к состоянию S2. Полученная информация может использоваться для самообучения и/или для улучшения или иного определения набора калибровочных данных.
Таким образом, на этапе 360 способа на фиг. 3 система обнаруживает второй переход устройства для очистки полости рта из одного состояния в другое. Например, идентификатор движения может обнаруживать поступательное перемещение с одной стороны рта на другую, поворот изнутри рта наружу, или и поступательное перемещение и поворот. Гироскоп, акселерометр, магнитометр и/или другие датчики идентификатора 28 движения посылают информацию на контроллер 30 постоянно или периодически, и изменения в такой информации могут быть интерпретированы контроллером как переход, в том числе, без ограничения, поступательное перемещение, поворот и/или другие перемещения или переходы. Согласно варианту осуществления контроллер интерпретирует информацию от идентификатора 28 движения как переход на основании сравнения с калибровочными данными, сравнения с заданными или запрограммированными данными и/или другими данными. Этапы 340, 350 и 360 могут повторяться на протяжении сеанса чистки.
Согласно другому варианту осуществления способ использует только данные о переходе для отслеживания движения и определения состояния устройства для очистки полости рта. Например, когда обнаружен переход, который обязательно определяет состояние, к которому устройство для очистки полости рта было перемещено, или в котором оно сейчас расположено, тогда необходимы только данные о переходе. В случае, когда переход определяет два или более возможных состояния, может быть необходимо или полагаться на другие данные датчика, или использовать предыдущий и/или последующий переходы для определения предыдущего состояния.
На этапе 370 способа система использует определения состояния, или только данные о переходе, как описано выше, полученные во время сеанса чистки для оценки сеанса чистки. Согласно варианту осуществления система хранит информацию об определении состояния, полученную во время сеанса чистки, для создания или выполнения иным образом оценки, или сейчас или в некоторый момент в будущем. Согласно другому варианту осуществления система хранит информацию о многочисленных сеансах чистки для сбора данных во времени, включающих в себя улучшения времени чистки, техники чистки или других показателей, а также отсутствие улучшения.
Например, одна цель оценки сеанса чистки может состоять в отслеживании величины времени, которое пользователь тратит при чистке каждого места. Если общее рекомендуемое время чистки составляет две минуты, например, каждую из двенадцати областей, определенных на фиг. 4, следует чистить приблизительно десять секунд. Система может сравнивать отслеженные состояния по таймеру, часам или таблице для определения, какие области были надлежаще почищены и какие области были почищены ненадлежаще.
Согласно варианту осуществления система может использовать другие оценочные показатели для сеанса чистки. Например, другой показатель может представлять собой расстояние, пройденное внутри каждого участка. При этом может требоваться знание размера челюсти, которое может быть извлечено, например, или из сеанса калибровки, или из обычной чистки. Другой показатель может представлять собой разброс сигналов внутри одной области. Например, если пользователь задерживает щетку только в одном местонахождении, разброс будет очень маленьким. Когда пользователь перемещает щетку по одной области, таким образом, охватывая ее более тщательно, разброс сигналов будет больше и более соответствующим калибровочным кривым, которые также шире. Согласно варианту осуществления система может использовать множество показателей для оценки сеанса чистки многомерным образом.
На необязательном этапе 375 способа система определяет, кто использует щетку во время сеанса чистки. Система может затем необязательно связывать информацию с пользователем и/или учетной записью пользователя. Например, согласно варианту осуществления система использует наблюдаемый порядок определенных состояний для определения, кто использовал щетку во время сеанса чистки. Можно разумно предполагать, что большинство пользователей будут чистить свои зубы по идентичным или аналогичным схемам во время сеансов чистки. Соответственно, как только определенный порядок или схема связывается с конкретным пользователем и/или учетной записью пользователя, последующие сеансы чистки достаточно близки к сохраненным или связанному порядку или схеме. Определение того, является ли сеанс достаточно близким к предыдущему сеансу, может быть определено, например, посредством порогового значения или определения вероятности.
На этапе 380 способа оценка сеанса чистки может передаваться. Например, система может передавать информацию пользователю о областях, почищенных надлежащим образом, и областях, почищенных ненадлежащим образом. Это может выполняться посредством использования дисплея, например, дисплея с восемью или двенадцатью заданными областями и визуального индикатора надлежаще почищенных участков, ненадлежаще почищенных участков и/или и тех, и других. Согласно варианту осуществления система может предоставлять отслеживание в реальном времени и определение данных местонахождения пользователю или удаленной системе. Например, система может передавать отслеживание в реальном времени и определение данных местонахождения на компьютер посредством проводного или беспроводного сетевого соединения. В качестве другого примера система может передавать хранимое отслеживание и данные определения местонахождения на компьютер посредством проводного или беспроводного сетевого соединения. Таким образом, система может передавать информацию об одном сеансе чистки и/или множестве сеансов чистки непосредственно специалисту-медику, например, стоматологу или стоматологическому гигиенисту.
Все определения, приведенные и используемые в настоящем документе, следует понимать как имеющие приоритет над словарными определениями, определениями в документах, включенных посредством ссылки, и/или обычными значениями определяемых терминов.
Слово в единственном числе, при использовании в настоящем документе в описании и в формуле, следует понимать в значении «по меньшей мере один», если явно не указано иное.
Фразу ʺи/илиʺ при использовании в настоящем документе, в описании и в формуле, следует понимать в значении ʺлюбой из двух или обаʺ элементов, соединенных таким образом, то есть, элементов, которые совместно присутствуют в некоторых случаях и раздельно присутствуют в других случаях. Множество элементов, перечисленных с помощью слов ʺи/илиʺ, следует истолковывать таким же образом, то есть, ʺодин или болееʺ элементов, соединенных таким образом. Могут дополнительно иметься другие элементы, отличные от элементов, явно указанных фразой ʺи/илиʺ, связанные или не связанные с явно указанными элементами.
При использовании в настоящем документе, в описании и в формуле ʺилиʺ следует понимать в том же значении, что и ʺи/илиʺ, как определено выше. Например, при разделении элементов в списке, ʺилиʺ или ʺи/илиʺ следует истолковывать как включающие, то есть, как включение по меньшей мере одного, но также включение более, чем одного, из множества или списка элементов, и, необязательно, дополнительных неперечисленных предметов. Только термины, явно указывающие на противоположное, например, ʺтолько один изʺ или ʺстрого один изʺ или, при использовании в формуле, ʺсостоящий изʺ относятся к включению строго одного элемента из множества или списка элементов. В целом термин ʺилиʺ при использовании в настоящем документе следует истолковывать в исключающем смысле (то есть ʺодин или другой, но не обаʺ) только в том случае, когда ему предшествуют термины исключения, например, ʺкаждыйʺ, ʺодин изʺ, ʺтолько один изʺ или ʺстрого один изʺ.
При использовании в настоящем документе, в описании и в формуле, фразу ʺпо меньшей мере одинʺ в отношении списка из одного или более элементов следует понимать в значении по меньшей мере один элемент, выбранный из любого одного или более элементов в списке элементов, но необязательно включающих в себя по меньшей мере один из каждого и всякого элемента, явно перечисленного в списке элементов, и не исключающих любых сочетаний элементов в списке элементов. Это определение также допускает, что могут дополнительно иметься элементы, отличные от элементов, явно указанных в списке элементов, к которым относится фраза ʺпо меньшей мере одинʺ, независимо от того, имеют отношение эти элементы к явно указанным элементами или нет.
Следует также понимать, что, если явно не указано иное, в любых способах, заявленных в настоящем документе, которые включают в себя более одного этапа или действия, порядок этапов или действий способа не обязательно ограничивается порядком, в котором указанные этапы или действия способа изложены.
В формуле, а также в вышеприведенном описании, все переходные фразы, такие как ʺсодержащийʺ, ʺвключающий в себяʺ, ʺнесущийʺ, ʺимеющийʺ, ʺсодержащийʺ, ʺвмещающий в себяʺ, ʺзаключающий в себяʺ, ʺсоставленный изʺ и подобные должны пониматься как открытые, то есть, означать включение в себя, но не ограничение. Хотя в настоящем документе описаны и проиллюстрированы некоторые варианты осуществления изобретения, специалистам в данной области техники легко представить себе множество других средств и/или конструкций для выполнения функции и/или получения результатов и/или одного или более преимуществ, описанных в настоящем документе, и каждое из таких изменений и/или модификаций считается находящимся в пределах объема вариантов осуществления изобретения, описанных в настоящем документе. В более широком виде, специалисты в данной области техники легко поймут, что все параметры, размеры, материалы и/или конфигурации приведены только в качестве примера и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретного применения или применений, для которых используются идеи изобретения. Специалисты в данной области техники поймут или смогут установить тривиальным опытным путем многие эквивалентны частных вариантов осуществления, описанных в настоящем документе. Поэтому должно быть понятно, что вышеприведенные варианты осуществления представлены исключительно для примера и что в пределах объема приложенной формулы и ее эквивалентов варианты осуществления изобретения могут применяться иным образом, чем явно описано и заявлено. Варианты осуществления настоящего раскрытия направлены на каждый отдельный признак, систему, изделие, материалы, комплект и/или способ, описанный в настоящем документе. Кроме того, любое сочетание двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если только такие признаки, системы, изделия, материалы, комплекты и/или способы, не являются взаимно несовместимыми, включено в объем настоящего раскрытия.

Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия

