Результат интеллектуальной деятельности: СПОСОБ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ОКАЗАНИЯ СОДЕЙСТВИЯ ВОДИТЕЛЯМ ПРИ СМЕНЕ ПОЛОС ДВИЖЕНИЯ НА ПРОЕЗЖЕЙ ЧАСТИ ДОРОГИ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Не применима.
УРОВЕНЬ ТЕХНИКИ
1. Область техники, к которой относится изобретение
Это изобретение в целом относится к оперативному управлению транспортными средствами, а конкретнее, к оказанию содействия водителям при смене полос движения на проезжей части дороги.
2. Уровень техники
Большая часть познавательных непроизводительных издержек оперативного управления моторным транспортным средством касается смены полосы движения. Водитель, не знакомый с конкретным маршрутом, может, в попытке избежать пропускания поворота или съезда с автомагистрали, прибегать к осуществлению одной или нескольких быстрых смен полосы движения. Быстрые смены полосы движения часто небезопасны как для водителя, так и для ближайших транспортных средств. При осуществлении смены полосы движения, могут рассматриваться по меньшей мере два фундаментальных вопроса: (a) «В какой полосе мне следует находиться?» и (b) «Когда мне следует сменить полосу движения?». Вследствие познавательных непроизводительных издержек, связанных со сменой полосы движения, некоторые транспортные средства включают в себя технологии планирования перемещения и маршрута. Технологии планирования перемещения и маршрута помогают водителю уменьшать познавательные непроизводительные издержки у водителя.
Эти технологии подразделяются на две основные категории: автономные системы указания полосы движения и системы предупреждения. Автономные системы указания полосы движения могут предлагать полосу движения для перемещения транспортного средства в нее. Однако, автономные системы указания полосы движения типично не осведомлены о том, в какой полосе движения транспортное средство находится в настоящее время, и не реагируют на локальную окружающую обстановку (например, не учитывают фактическое использование полосы движения). Дополнительно, предложения являются граничными условиями и не дают осуществимого плана для направления водителя в предложенную полосу движения. Системы предупреждения могут выполнять моментальное обнаружение объектов на закрытых от водителя участках обзора, чтобы предотвращать небезопасные переходы между полосами движения. Однако, системы предупреждения типично не имеют функциональных возможностей для заблаговременных планов и неспособны составлять расписание смены полосы движения в будущем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Заявлен способ для оказания содействия смене полосы движения на проезжей части дороги из текущей полосы движения, способ содержит этапы, на которых:
определяют, что транспортное средство может передвигаться в других полосах движения эффективнее, на основании скорости и ускорения транспортных средств на проезжей части дороги.
принимают ввод, выбирающий другую полосу движения из числа других полос движения;
рассчитывают скорость для поддержания транспортным средством; и
указывают, когда уместно, чтобы транспортное средство переходило в другую полосу движения между другими транспортными средствами.
В заявленном способе определение, что транспортное средство может передвигаться в других полосах движения эффективнее, содержит этап, на котором определяют, что движение транспорта движется быстрее в других полосах движения.
В заявленном способе определение, что транспортное средство может передвигаться в других полосах движения эффективнее, содержит этапы, на которых:
определяют скорость и ускорение транспортного средства;
определяют, что транспортное средство передвигается в текущей полосе движения;
осуществляют доступ к данным, указывающим скорость и ускорение одного или более других транспортных средств в пределах заданного расстояния от транспортного средства на проезжей части дороги, каждое из одного или более других транспортных средств передвигается в полосе движения, выбранной из одной или более других полос движения проезжей части дороги; и
определяют, что уместно, чтобы транспортное средство переходило в другую полосу движения, на основании скорости и ускорения транспортного средства, и скорости и ускорения одного или более других транспортных средств.
Заявленный способ дополнительно содержит этап, на котором используют дополненную реальность (AR) для подсвечивания других полос движения в визуальном формате в кабине транспортного средства.
В заявленном способе прием ввода, выбирающего другую полосу движения содержит этап, на котором выявляют ввод в действие указателя поворота в транспортном средстве.
Заявленный способ дополнительно содержит этапы, на которых:
определяют скорость и ускорение транспортного средства с использованием лазерного локатора; и
принимают данные скорости и ускорения для одного или более других транспортных средств на проезжей части дороги через связь между транспортными средствами (V2V).
Заявленный способ дополнительно содержит этапы, на которых:
используют дополненную реальность (AR) для подсвечивания скорости одного или более транспортных средств в другой полосе движения в визуальном формате внутри кабины транспортного средства; и
при этом, указание, когда уместно, чтобы транспортное средство переходило в другую полосу движения между другими транспортными средствами, состоит в том, что используют дополненную реальность (AR) для подсвечивания других транспортных средств в визуальном формате в кабине.
Заявленный способ дополнительно содержит этап, на котором определяют, что транспортное средство находится в полосе движения многополосной проезжей части дороги;
при этом, определение, что транспортное средство может передвигаться в других полосах движения эффективнее, состоит в том, что определяют, что транспортное средство может передвигаться эффективнее в одной или более других полос движения многополосной проезжей части дороги;
при этом, прием ввода, выбирающего другую полосу движения из числа других полос движения, состоит в том, что выбирают другую полосу движения из числа одной или более полос движения многополосной проезжей части дороги, другая полоса движения является смежной с полосой движения на многополосной проезжей части дороги; и
при этом, указание, когда уместно, чтобы транспортное средство переходило в другую полосу движения между другими транспортными средствами, состоит в том, что указывают, когда уместно, чтобы транспортное средство переходило в другую полосу движения многополосной проезжей части дороги.
Заявлено транспортное средство, транспортное средство содержит:
один или более процессоров;
системную память, присоединенную к одному или более процессоров, системная память хранит команды, которые являются исполняемыми одним или более процессоров;
один или более процессоров выполняет команды, хранимые в системной памяти, чтобы оказывать содействие водителю при смене полосы движения на проезжей части дороги, проезжая часть дороги включает в себя текущую полосу движения для проезда для транспортного средства и одну или более других полос движения для проезда, в том числе, следующее:
определять скорость и ускорение транспортного средства;
определять, что транспортное средство передвигается в текущей полосе движения для проезда;
осуществлять доступ к данным, указывающим скорость и ускорение одного или более других транспортных средств в пределах заданного расстояния от транспортного средства на проезжей части дороги, каждое из одного или более других транспортных средств передвигается в полосе движения, выбранной из числа одной или более других полос движения;
определять другую полосу движения для занятия транспортным средством на основании скорости и ускорения транспортного средства, и скорости и ускорения одного или более других транспортных средств, другая полоса движения выбрана из числа одной или более других полос движения;
воспроизводить визуализацию проезжей части дороги в кабине транспортного средства, визуализация предлагает смену полосы движения на другую полосу движения, подсвечивая другую полосу движения;
принимать ввод из кабины, одобряющий предложенную смену полосы движения;
рассчитывать скорость для поддержания транспортным средством при переходе из текущей полосы движения в надлежащую полосу движения; и
указывать в пределах визуализации, где транспортное средство должно переходить в другую полосу движения.
В заявленном транспортном средстве один или более процессоров, выполняющих команды, хранимые в системной памяти, для определения скорости и ускорения транспортного средства, содержат один или более процессоров, выполняющих команды, хранимые в системной памяти, чтобы использовать лазерный локатор для определения ускорения транспортного средства.
В заявленном транспортном средстве один или более процессоров, выполняющих команды, хранимые в системной памяти, для осуществления доступа к данным, указывающим скорость и ускорение одного или более других транспортных средств, содержат один или более процессоров, выполняющих команды, хранимые в системной памяти, чтобы принимать данные, указывающие скорость и ускорение одного или более других транспортных средств через связь между транспортными средствами (V2V).
В заявленном транспортном средстве один или более процессоров, выполняющих команды, хранимые в системной памяти, для воспроизведения визуализации проезжей части дороги в кабине транспортного средства, содержат использование дополненной реальности (AR) для воспроизведения визуализации.
В заявленном транспортном средстве один или более процессоров, выполняющих команды, хранимые в системной памяти, для приема ввода из кабины, содержат один или более процессоров, выполняющих команды, хранимые в системной памяти, для выявления ввода в действие указателя поворота в направлении другой полосы движения.
В транспортном средстве, транспортное средство передвигается в текущей полосе движения многополосной проезжей части дороги, многополосная проезжая часть дороги также включает в себя одну или более других полос движения, способ, содержащий этапы, на которых:
определяют скорость и ускорение транспортного средства;
определяют, что транспортное средство передвигается в текущей полосе движения;
осуществляют доступ к данным, указывающим скорость и ускорение одного или более других транспортных средств в пределах заданного расстояния от транспортного средства на проезжей части дороги, каждое из одного или более других транспортных средств передвигается в полосе движения, выбранной из числа одной или более других полос движения;
определяют другую полосу движения для занятия транспортным средством на основании скорости и ускорения транспортного средства, и скорости и ускорения одного или более других транспортных средств, другая полоса движения выбрана из числа одной или более других полос движения;
воспроизводят визуализацию проезжей части дороги в кабине транспортного средства, визуализация предлагает смену полосы движения на другую полосу движения, подсвечивая другую полосу движения;
принимают ввод из кабины, одобряющий предложенную смену полосы движения;
рассчитывают скорость для поддержания транспортным средством при переходе из текущей полосы движения в надлежащую полосу движения; и
указывают в пределах визуализации, где транспортное средство должно переходить в другую полосу движения.
В способе указание в пределах визуализации, когда транспортному средству надлежит переходить в другую полосу движения, состоит в том, что намечают пространство перед или после по меньшей мере одного транспортного средства в другой полосе движения в качестве благоприятной возможности для смены полосы движения, по меньшей мере одно транспортное средство включено в одно или более транспортных средств.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Конкретные признаки, аспекты и преимущества настоящего изобретения станут лучше понятны в отношении нижеследующего описания и прилагаемых чертежей, где:
фиг. 1 иллюстрирует примерную структурную схему вычислительного устройства;
фиг. 2 иллюстрирует примерную многополосную проезжую часть дороги, где водителям может оказываться содействие при смене полос движения на проезжей части дороги;
фиг. 3 иллюстрирует блок-схему последовательности операций примерного способа для содействия водителю при смене полос движения на проезжей части дороги;
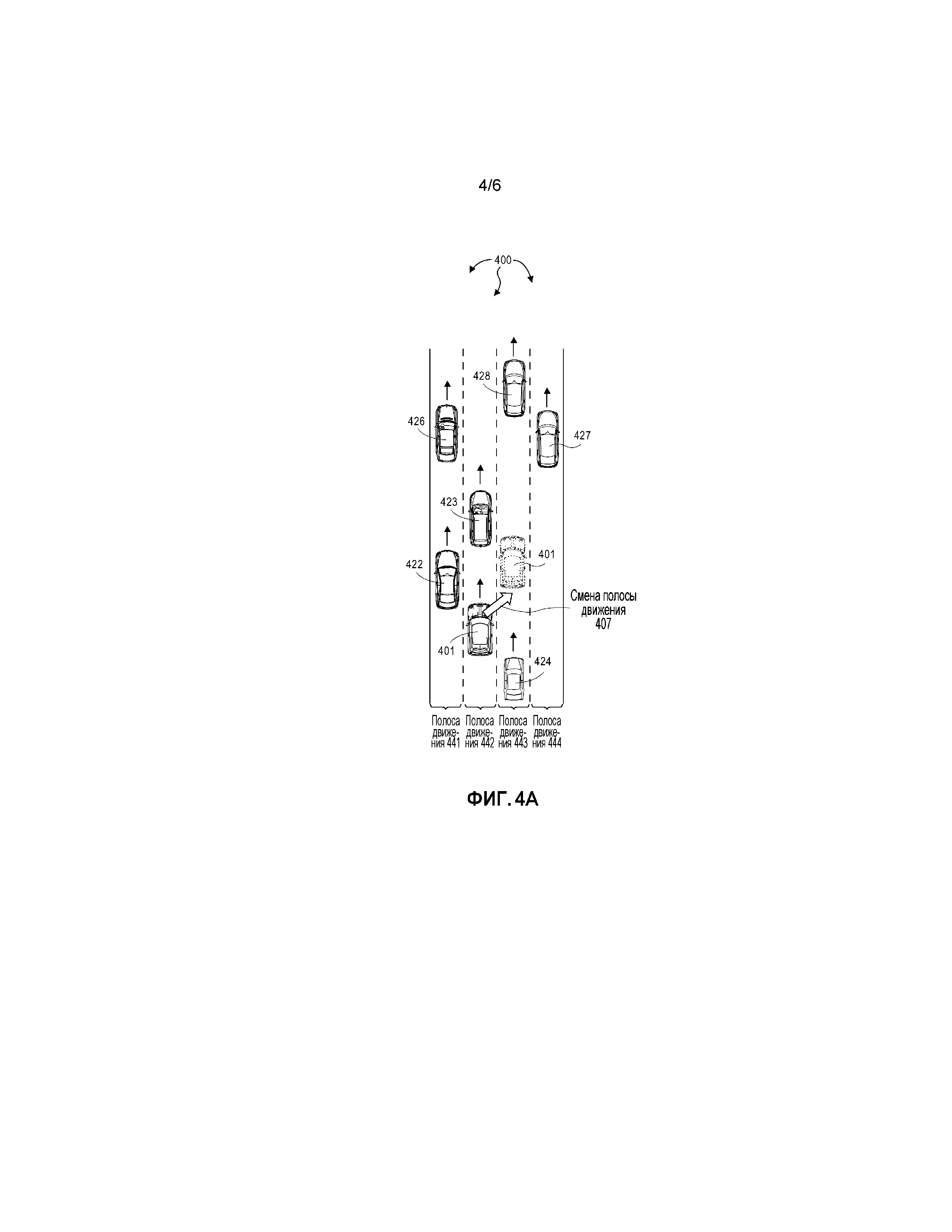
фиг. 4A иллюстрирует пример транспортных средств на многополосной проезжей части дороги;
фиг. 4B иллюстрирует примерное отображение в реальном времени, дополненное, чтобы указывать рекомендованную полосу движения;
фиг. 4C иллюстрирует примерное отображение в реальном времени, дополненное, чтобы указывать местоположение смены полосы движения и скорости транспортных средств;
фиг. 5 иллюстрирует поток данных примерного способа для содействия водителям при смене полос движения на проезжей части дороги.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение распространяется на способы, системы и компьютерные программные продукты для содействия водителям при смене полос движения на проезжей части дороги. Вообще, аспекты изобретения используются в моторных транспортных средствах, чтобы направлять водителя в более эффективно функционирующую полосу движения многополосной проезжей части дороги. Рекомендация полосы движения может быть основана на распознанных и/или сообщенных аспектах окружающих транспортных средств. Рекомендации полосы движения могут передаваться водителю речевыми и/или визуальными подсказками. Рекомендации полосы движения могут модифицироваться (по существу) в реальном времени в ответ на изменение условий в окружающей обстановке проезжей части дороги (например, на то, что транспортное средство в соседней полосе движения изменило скорость).
В условиях более интенсивного движения транспорта, может быть трудно маневрировать вокруг других транспортных средств, чтобы ехать по более оптимальному маршруту в пункт назначения. Водители часто неспособны прокладывать свой путь вокруг других транспортных средств наиболее безопасным и самым надежным образом вследствие отсутствия видимости, простирающейся за пределами их периферийной линии прямой видимости. Смена полос движения и даже въезд в поток движения, может становиться затрудненным по мере того, как возрастает количество транспортных средств на дороге. Водители могут становиться захваченными между другими автомобилями, неспособными оценивать скорости транспортных средств вокруг них.
Аспекты изобретения могут использоваться для содействия водителю при выборе и переходе в оптимальную полосу движения на основании локальных условий движения транспорта. Аспекты изобретения полезны, когда некоторые полосы движения транспорта движутся быстрее, например, вследствие меньшего въезда в поток движения или свободных съездов, или в тех случаях, когда полосы движения могут быть заблокированы из-за более медленно движущихся транспортных средств. Компоненты системы содействия смене полосы движения могут быть встроены в транспортное средство, чтобы уменьшать многие препятствия во время ежедневной поездки на работу и обратно для создания безопасной и более эффективной окружающей обстановки на автомагистралях и автострадах.
Система содействия смене полосы движения в транспортном средстве может включать в себя систему рекомендаций полосы движения. Система рекомендаций полосы движения может использовать скорость и ускорение транспортного средства и скорость и ускорение других находящихся поблизости транспортных средств, чтобы вырабатывать рекомендацию полосы движения. В одном аспекте, транспортное средство использует лазерный локатор (LIDAR) для определения текущих скорости и ускорения окружающих транспортных средств и ускорения транспортного средства. Из ускорения транспортного средства, могут выводиться будущие скорости транспортного средства (например, несколькими секундами позже).
Транспортное средство также может использовать различные датчики для определения текущей полосы движения, где в настоящее время передвигается транспортное средство. Транспортное средство также может использовать связь между транспортными средствами (V2V), чтобы как отправлять, так и принимать данные из окружающих транспортных средств в пределах заданного расстояния от транспортного средства. Например, с использованием V2V, различные транспортные средства в пределах заданного расстояния друг от друга могут обмениваться информацией о скорости и ускорении (или замедлении).
В аспекте, транспортное средство включает в себя проекционную систему с дополненной реальностью (AR), например, такую как система, которая проецирует отображение (например, проекционное отображение на лобовом стекле (HUD)) на переднем ветровом стекле транспортного средства. С использованием дополненной реальности (AR), проекционная система может подсвечивать (например, от рассеянного света, покрытия, искрящейся дороги, и т. д.) одну или более рекомендованных полос движения для водителя на основании средней прогнозируемой скорости окружающих транспортных средств. С использованием AR, проекционная система также может указывать среднюю прогнозируемую скорость окружающих транспортных средств в пределах одной или более рекомендованных полос движения. Рекомендованные полосы движения могут быть полосами движения, где транспорт движется быстрее, чем в текущей полосе движения. Рекомендованные полосы движения могут быть смежными полосами движения слева или справа от текущей полосы движения или могут быть другими полосами движения, которые находятся дальше от текущей полосы движения, например, через две или более полос движения слева, или через две или более полос движения справа от текущей полосы движения.
Блок обработки (например, ЦПУ, CPU) в транспортном средстве может сохранять, рассчитывать и анализировать данные для определения и предложения надлежащей полосы движения для занятия транспортным средством. В одном из аспектов, надлежащая полоса движения может определяться на основании наибольшей прогнозируемой скорости из всех возможных полос движения. Расчеты могут производиться на основании скорости и ускорения окружающих транспортных средств. Расчеты могут включать в себя определение, является ли переход в другую полосу движения оптимальным выбором для транспортного средства в ближайшей перспективе, и/или имеет ли транспортное средство надлежащие скорость и/или ускорение, чтобы объехать другие транспортные средства в окружающих полосах движения для выполнения смены полосы движения.
Система содействия смене полосы движения также может включать в себя модуль определения местоположения. Когда рекомендованная полоса движения предложена (например, посредством подсвечивания в AR), водитель может предпочесть инициировать смену полосы движения на рекомендованную полосу движения. В одном из аспектов, водитель указывает желание сменить полосу движения, вводя в действие указатель поворота в направлении рекомендованной полосы движения. Ввод в действие указателя поворота указывает системе содействия смене полосы движения, что желательна смена полосы движения на рекомендованную полосу движения. В ответ на ввод в действие сигнала поворота, одно или более транспортных средств в рекомендованной полосе движения подсвечиваются в AR. Подсвечивание транспортного средства может включать в себя одно или более из: рассеянного света AR, покрытия, сверкающей модели, и т. д. Относительно каждого из одного или более транспортных средств может отображаться число, указывающее надлежащую скорость, которую должно поддерживать транспортное средство, для того чтобы безопасно въезжать в поток движения рекомендованной полосы движения.
Если указатель поворота не введен в действие (например, в течение заданного времени), система содействия смене полосы движения определяет, что водитель проигнорировал предложенную смену полосы движения, и не выполняются никакие дополнительные действия.
Блок обработки (например, ЦПУ) в транспортном средстве может рассчитывать безопасную скорость, необходимую для смены полосы движения, в дополнение к способности анализировать данные окружающих автомобилей, чтобы идентифицировать одиночное транспортное средство для предоставления возможности такого перемещения. С другой стороны, если водитель пытается въехать в поток движения или сменить полосу движения небезопасно для него или ее самих, система содействия смене полосы движения может предупреждать водителя, что желательная полоса движения небезопасна, уведомлять водителя, что следует замедлиться, уведомлять водителя, что не следует менять полосу движения в данный момент времени, и т. д.
Аспекты изобретения повышают безопасность, предоставляя дополнительные возможности восприятия для оказания содействия водителю и улучшая впечатление водителя во время поездки. Эффективность и безопасность в поездке улучшается, обеспечивая выгоду для подвижности водителей на проезжей части дороги.
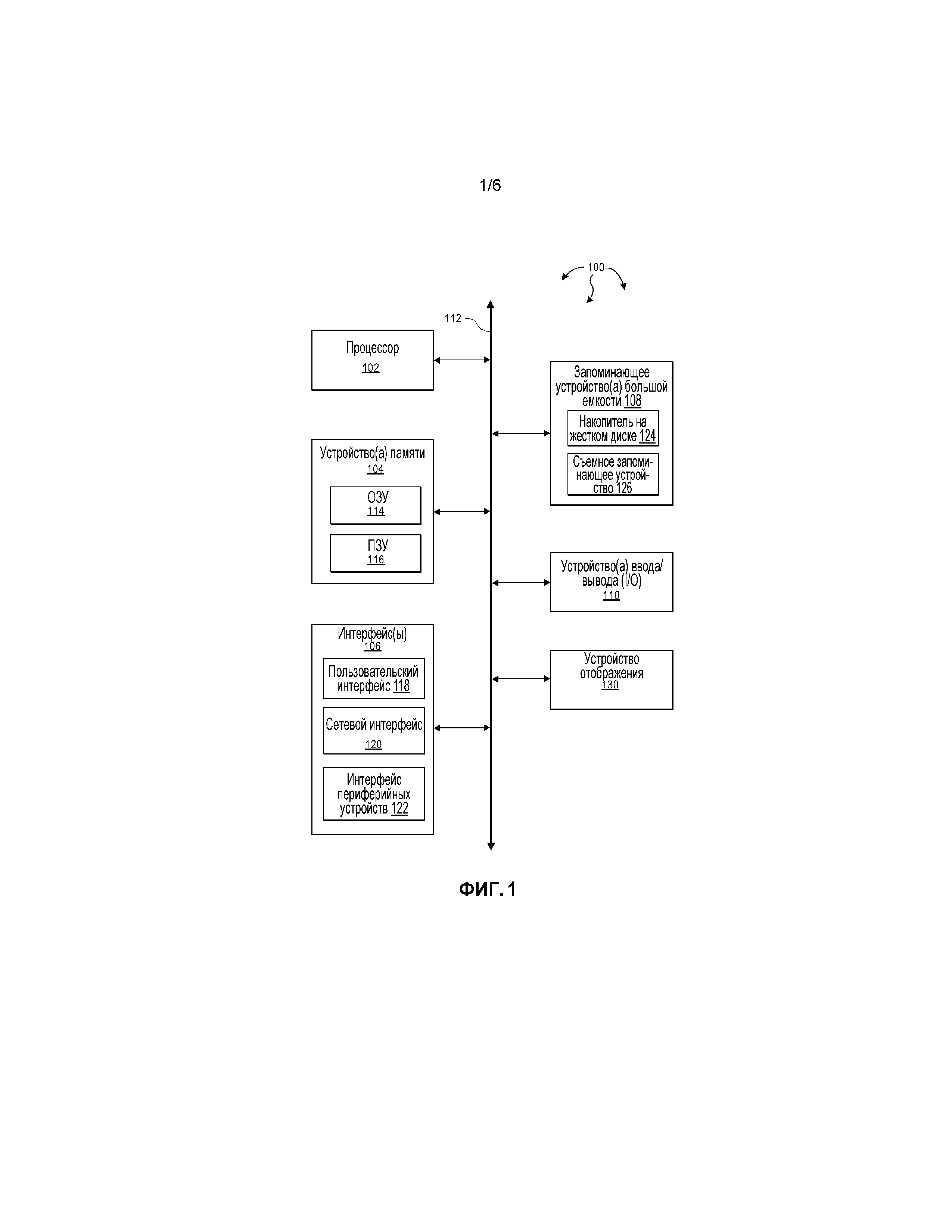
Аспекты изобретения могут быть реализованы в многообразии разных типов вычислительных устройств. Фиг. 1 иллюстрирует примерную структурную схему вычислительного устройства 100. Вычислительное устройство 100 может использоваться для выполнения различных процедур, таких как раскрытые в материалах настоящей заявки. Вычислительное устройство 100 может функционировать в качестве сервера, клиента или любой другой вычислительной сущности. Вычислительное устройство 100 может выполнять различные функции связи и передачи данных, как описано в материалах настоящей заявки, и может выполнять одну или более прикладных программ, таких как прикладные программы, описанные в материалах настоящей заявки. Вычислительное устройство 100 может быть любым из широкого многообразия вычислительных устройств, таких как мобильный телефон или другое мобильное устройство, настольный компьютер, блокнотный компьютер, серверный компьютер, карманный компьютер, планшетный компьютер, и тому подобное.
Вычислительное устройство 100 включает в себя один или более процессоров 102, одно или более устройств 104 памяти, один или более интерфейсов 106, одно или более запоминающих устройств 108 большой емкости, одно или более устройств 110 ввода/вывода (I/O) и устройство 130 отображения, все из которых присоединены к шине 112. Процессор(ы) 102 включает в себя один или более процессоров или контроллеров, которые выполняют команды, хранимые в устройстве(ах) 104 памяти и/или запоминающем устройстве(ах) 108 большой емкости. Процессор(ы) 102 также может включать в себя различные типы компьютерных запоминающих носителей, такие как сверхоперативная память.
Устройство(а) 104 памяти включает в себя различные компьютерные запоминающие носители, такие как энергозависимая память (например, оперативное запоминающее устройство 114 (ОЗУ, RAM)) и/или энергонезависимая память (например, постоянное запоминающее устройство 116 (ПЗУ, ROM)). Устройство(а) 104 памяти также может включать в себя перезаписываемое ПЗУ, такое как флэш-память.
Запоминающее устройство(а) 108 большой емкости включает в себя различные компьютерные запоминающие носители, такие как магнитные ленты, магнитные диски, оптические диски, твердотельная память (например, флэш-память), и так далее. Как изображено на фиг. 1, конкретным запоминающим устройством большой емкости является накопитель 124 на жестком магнитном диске. Различные приводы также могут быть включены в запоминающее устройство(а) 108 большой емкости, чтобы давать возможность считывания с и/или записи на различные машинно-читаемые носители. Запоминающее устройство(а) 108 большой емкости включает в себя съемные носители 126 и/или несъемные носители.
Устройство(а) 110 ввода/вывода включает в себя различные устройства, которые предоставляют данным и/или другой информации возможность вводиться в или извлекаться из вычислительного устройства 100. Примерное устройство(а) 110 ввода/вывода включает в себя устройства управления курсором, клавиатуры, кнопочные панели, сканеры штрих-кодов, микрофоны, мониторы или другие устройства отображения, громкоговорители, принтеры, платы сетевого интерфейса, модемы, камеры, объективы, радиолокаторы, ПЗС (приборы с зарядовой связью, CCD) или другие устройства захвата изображений, и тому подобное.
Устройство 130 отображения включает в себя любой тип устройства, способного отображать информацию одному или более пользователям вычислительного устройства 100. Примеры устройства 130 отображения включают в себя монитор, дисплейный терминал, проекционное видеоустройство, и тому подобное.
Интерфейс(ы) 106 включает в себя различные интерфейсы, которые предоставляют вычислительному устройству 100 возможность взаимодействовать с другими системами, устройствами или вычислительными средами, а также людьми. Примерный интерфейс(ы) 106 может включать в себя любое количество разных сетевых интерфейсов 120, таких как интерфейсы в персональные сети (PAN), локальные сети (LAN), локальные сети контроллеров (CAN), глобальные сети (WAN), беспроводные сети (например, беспроводная связь ближнего радиуса действия (NFC), Bluetooth, Wi-Fi, и т. д.) и сеть Интернет. Другие интерфейсы включают в себя пользовательский интерфейс 118 и интерфейс 122 периферийных устройств.
Шина 112 предоставляет процессору(ам) 102, устройству(ам) 104 памяти, интерфейсу(ам) 106, запоминающему устройству(ам) 108 большой емкости и устройству(ам) 110 вода/вывода возможность поддерживать связь друг с другом, а также с другими устройствами или компонентами, присоединенными к шине 112. Шина 112 представляет собой один или более из нескольких типов шинных структур, таких как системная шина, шина PCI (соединения периферийных компонентов), шина стандарта IEEE 1394 (Института инженеров по электротехнике и электронике), шина USB (универсальной последовательной шины), и так далее.
В этом описании и нижеследующей формуле изобретения, «дополненная реальность» («AR») определена в качестве действующего непосредственного или опосредованного вида физической реальной окружающей обстановки, чьи элементы дополняются (или добавляются) сформированными компьютером входными данными с датчиков, такими как звук, видео, графика, данные из глобальной системы определения местоположения (GPS). Дополнение может происходить в реальном времени и в семантическом контексте с элементами окружающей обстановки, такими как с подсвечиванием полос движения или транспортных средств или указанием скоростей наряду с транспортным средствами в окружающей обстановке проезжей части дороги. То есть, информация об окружающей обстановке и ее объектах накладывается на реальный мир.
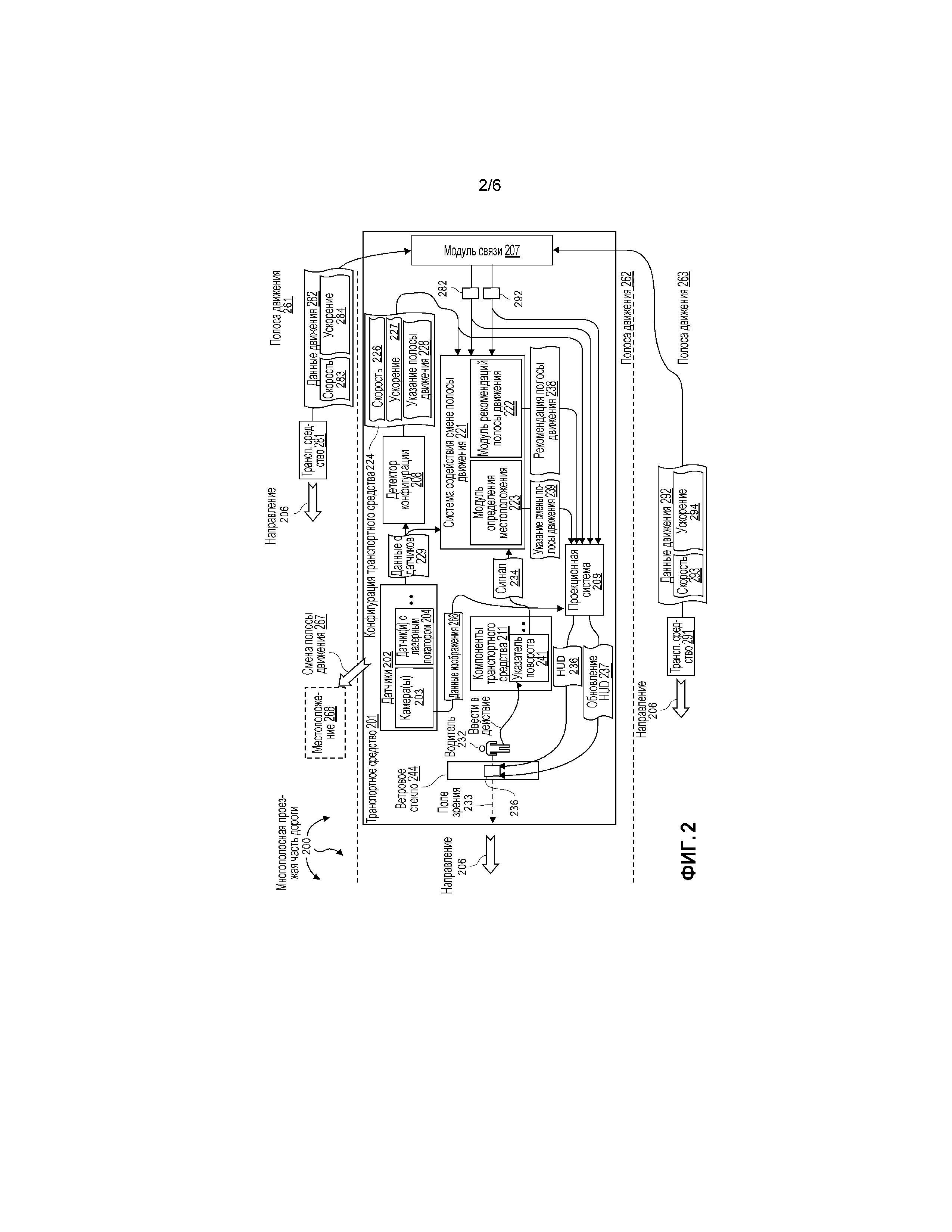
Фиг. 2 иллюстрирует примерную многополосную проезжую часть 200 дороги, где водителям может оказываться содействие при смене полос движения на проезжей части дороги; Со ссылкой на фиг. 2, многополосная проезжая часть 200 дороги включает в себя полосы 261, 262 и 263 движения, предназначенные для поддержания движения моторных транспортных средств в направлении 206. Транспортные средства 201, 281 и 291 передвигаются в полосах 262, 261 и 263 движения, соответственно, и едут в направлении 206. Каждое из транспортных средств 201, 281 и 291 может меняться по размеру и может быть тем же самым типом транспортного средства или иным типом транспортного средства, например, таким как легковой автомобиль, грузовой автомобиль, автобус, автофургон, мотоцикл, и т. д. В одном из аспектов, полосы 261 и 263 движения являются смежными с полосой 262 движения. Например, полоса 261 движения может быть следующей полосой движения справа от полосы 262 движения (при движении в направлении 206). Полоса 263 движения может быть следующей полосой движения слева от полосы 262 движения (при движении в направлении 206).
Многополосная проезжая часть 200 дороги может включать в себя одну или более дополнительных полос движения (не показаны), также предназначенных для поддержания движения транспорта в направлении 206. Например, многополосная проезжая часть 200 дороги может включать в себя одну или более дополнительных полос движения справа от полосы 261 движения и/или одну или более дополнительных полос движения слева от полосы 263 движения, также предназначенных для поддержания движения транспорта в направлении 206. Многополосная проезжая часть 200 дороги также может включать в себя множество полос движения (не показаны), предназначенных для поддержания движения транспорта в направлении, противоположном направлению 206. Разделительная полоса может отделять полосы движения, предназначенные для поддержания движения транспорта в направлении 206, от полос движения, предназначенных для поддержания движения транспорта в направлении, противоположном направлению 206 (например, на автомагистрали или автостраде с двусторонним движением).
Как изображено, транспортное средство 201 включает в себя датчики 202, модуль 207 связи, детектор 208 конфигурации, проекционную систему 209, компоненты 211 транспортного средства, систему 221 содействия смене полосы движения и ветровое стекло 244. Каждый из датчиков 202, модуля 207 связи, детектора 208 конфигурации, проекционной системы 209, компонентов 211 транспортного средства, системы 221 содействия смене полосы движения и ветрового стекла 244, а также их соответственные компоненты могут быть присоединены друг к другу по (или быть частью) сети, например, такой как PAN, LAN, CAN, WAN и даже сеть Интернет. Соответственно, датчики 202, модуль 207 связи, детектор 208 конфигурации, проекционная система 209, компоненты 211 транспортного средства, система 221 содействия смене полосы движения и ветровое стекло 244, а также любые другие присоединенные компьютерные системы и их компоненты, могут создавать связанные с сообщением данные и обмениваться связанными с сообщением данными (например, полезной нагрузкой беспроводной связи ближнего радиуса действия (NFC), пакетами Bluetooth, дейтаграммами межсетевого протокола (IP) и других высокоуровневых протоколов, которые используют дейтаграммы IP, таких как протокол управления передачей (TCP), протокол передачи гипертекстовых файлов (HTTP), простой протокол пересылки электронной почты (SMTP), и т. д.) по сети.
Водитель 232 может использовать компоненты 211 транспортного средства для управления функционированием транспортного средства 201. Например, водитель 232 может использовать указатель 241 поворота для предупреждения других транспортных средств, когда транспортное средство 201 собирается переместиться влево или вправо. Водитель 232 может использовать другие компоненты из компонентов 211 транспортного средства для управления направлением (например, рулевое колесо) и скоростью (например, дроссель и тормоза) транспортного средства 201.
Датчики 202 включают в себя камеру(ы) 203 и датчик(и) 204 с лазерным локатором. Датчики 202 также могут включать в себя другие типы датчиков (не показаны), например, такие как датчики с радиолокатором, акустические датчики, ультразвуковые датчики, электромагнитные датчики, и т. д. Вообще, датчики 202 могут считывать и/или контролировать объекты вокруг транспортного средства 201. Датчики 202 могут выводить данные с датчиков, указывающие положение, и оптический поток контролируемых объектов.
Детектор 208 конфигурации выполнен с возможностью определять конфигурацию транспортного средства 201 по данным с датчиков. Конфигурация может включать в себя скорость транспортного средства 201, ускорение (или замедление) транспортного средства 201 и полосу движения, где передвигается транспортное средство 201.
Система 221 содействия смене полосы движения включает в себя модуль 222 рекомендаций полосы движения и модуль 223 определения местоположения. Модуль 222 рекомендаций полосы движения выполнен с возможностью рекомендовать полосу движения для транспортного средства 201 на основании конфигурации транспортного средства 201 и скорости и ускорения (или замедления) других транспортных средств, передвигающихся по многополосной проезжей части 200 дороги в пределах заданного расстояния от транспортного средства 201. Модуль 222 рекомендаций полосы движения может выводить указание рекомендованной полосы движения в проекционную систему 209. Модуль 223 определения местоположения выполнен с возможностью идентифицировать местоположение в пределах рекомендованной полосы движения, где транспортное средство 201 может безопасно переходить из текущей полосы движения в рекомендованную полосу движения (например, имеющий достаточные размеры промежуток/интервал между другими транспортными средствами, едущими в рекомендованной полосе движения). Модуль 223 определения полосы движения может выводить указание идентифицированного места в проекционную систему 209.
Вообще, проекционная система 209 может принимать данные изображения (например, данные 206 изображения) окружающей обстановки проезжей части дороги вокруг транспортного средства 201 с камер(ы) 203. Из данных изображения, проекционная система 209 может воспроизводить визуальное отображение (например, HUD) на ветровом стекле 244. Проекционная система 209 может дополнять элементы в данных изображения, например, элементы разметки полосы движения, другие транспортные средства, места въезда в поток движения, и т. д., дополнительными данными. Например, проекционная система 209 может подсвечивать элементы разметки полосы движения или транспортные средства, указывать скорости транспортных средств, подсвечивать места въезда в поток движения, и т. д., в пределах визуального отображения. В качестве альтернативы, проекционная система 209 может воспроизводить дополненное визуальное отображение на устройстве отображения в кабине транспортного средства 201.
Модуль 207 связи может включать в себя аппаратные компоненты (например, беспроводной модем или беспроводную сетевую плату) и/или программные компоненты (например, стек протоколов) для беспроводной связи с другими транспортными средствами и/или компьютерными системами. Модуль 207 связи может использоваться, чтобы способствовать связи между транспортными средствами (V2V), а также между транспортным средством и инфраструктурой (V2I). Транспортные средства 281 и 291 (а также любые другие транспортные средства на многополосной проезжей части 200 дороги) могут включать в себя аналогично выполненный модуль связи. Таким образом, транспортные средства на многополосной проезжей части 200 дороги могут обмениваться информацией друг с другом с использованием связи V2V.
Каждое из транспортных средств 281 и 291 (а также любые другие транспортные средства на многополосной проезжей части 200 дороги) также может включать в себя компоненты, которые предусматривают по меньшей мере подмножество, а возможно все, из функциональных возможностей, обеспечиваемых датчиками 202, детектором 208 конфигурации, проекционной системой 209, компонентами 211 транспортного средства, системой 221 содействия смене полосы движения и ветровым стеклом 244.
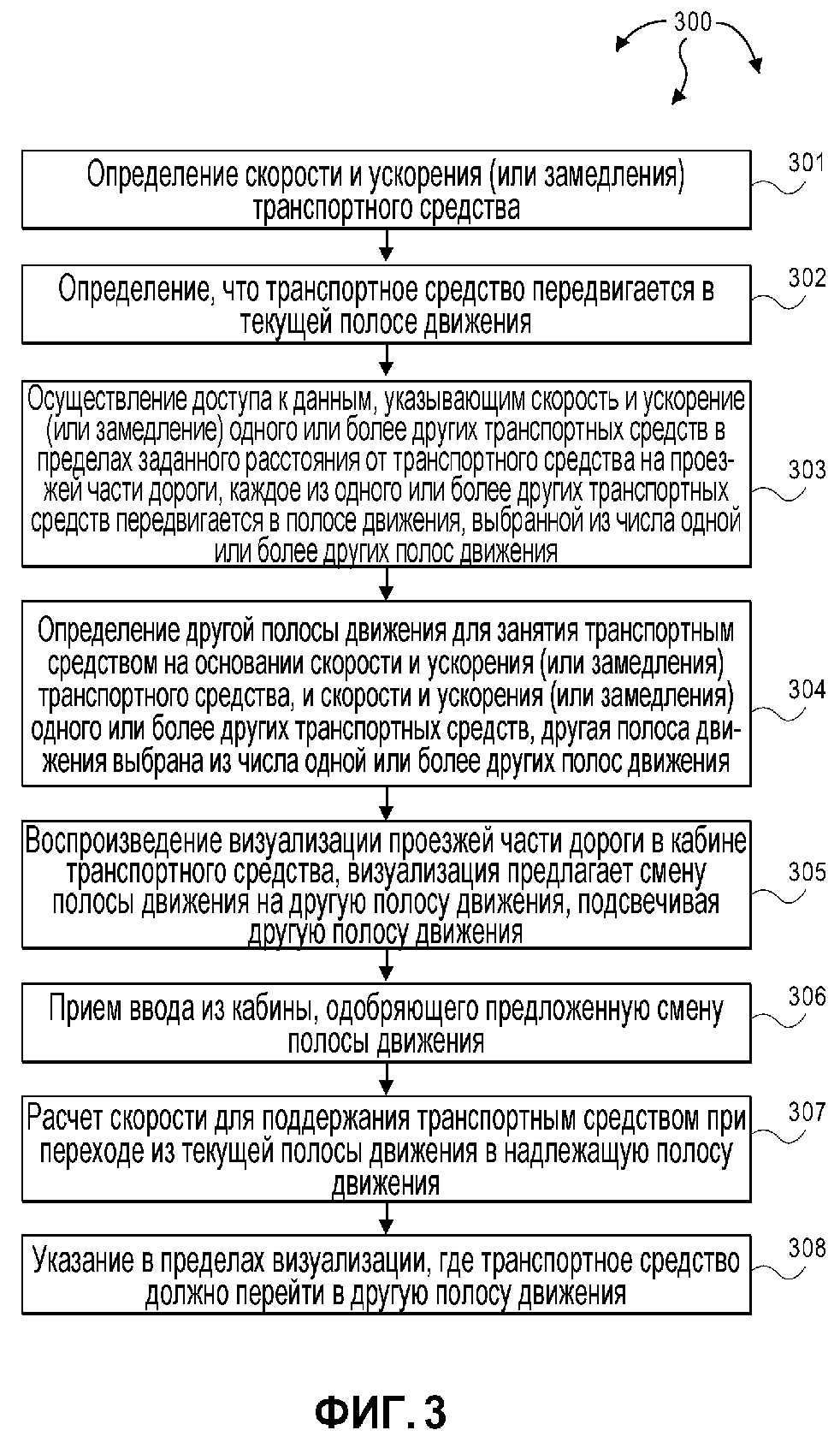
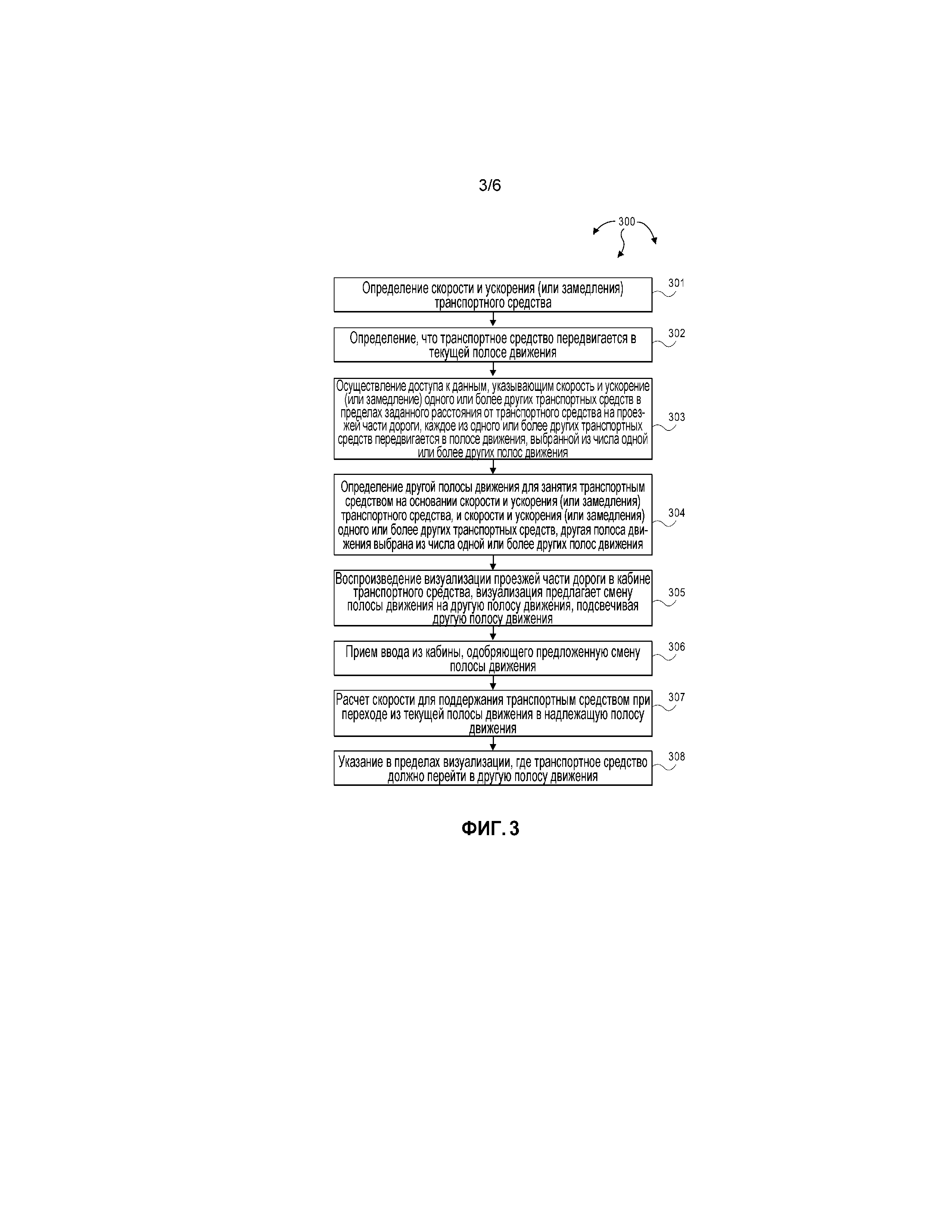
Фиг. 3 иллюстрирует блок-схему последовательности операций примерного способа для содействия водителю при смене полос движения на проезжей части дороги. Способ 300 будет описан в отношении компонентов и данных компьютерной архитектуры 200.
Способ 300 включает в себя определение скорости и ускорения (или замедления) транспортного средства (301). Способ 300 включает в себя определение, что транспортное средство передвигается в текущей полосе движения (302). Например, датчики 202 могут воспринимать данные 229 с датчиков из окружающей обстановки вокруг транспортного средства 201. Из данных 229 с датчиков, детектор 208 конфигурации может выявлять, что транспортное средство 201 находится в конфигурации 224 транспортного средства. Конфигурация 224 транспортного средства включает в себя скорость 226, ускорение 227 и указание 228 полосы движения. Скорость 226 может указывать текущую скорость транспортного средства 201 (например, в милях в час, «миль/час»), ускорение 227 может указывать изменение скорости 226 (например, возрастает или убывает скорость 226), а указание 228 полосы движения может указывать, что транспортное средство 201 находится в полосе 262 движения.
Данные 229 с датчиков также могут указывать местоположение других транспортных средств на многополосной проезжей части дороги в пределах заданного расстояния (например, в пределах ¼ мили) от транспортного средства 201. Например, данные 229 с датчиков могут указывать местоположение транспортного средства 281 в полосе 261 движения и местоположение транспортного средства 291 в полосе 263 движения. Данные 229 с датчиков могут считываться и отправляться в детектор 208 конфигурации и систему 221 содействия смене полосы движения на постоянной основе по мере того, как транспортное средство 201 едет по многополосной проезжей части 200 дороги.
Способ 300 включает в себя осуществление доступа к данным, указывающим скорость и ускорение (или замедление) одного или более других транспортных средств в пределах заданного расстояния от транспортного средства на проезжей части дороги, каждое из одного или более других транспортных средств передвигается в полосе движения, выбранной из числа одной или более других полос движения (303). Например, модуль 207 связи может принимать данные 282 движения с транспортного средства 281. Данные 282 движения включают в себя скорость 283 и ускорение 284. Скорость 283 может указывать текущую скорость транспортного средства 281 (например, в милях в час), а ускорение 284 может указывать изменение скорости 283 (например, возрастает или убывает скорость 283). Подобным образом, модуль 207 связи может принимать данные 292 движения с транспортного средства 291. Данные 292 движения включают в себя скорость 293 и ускорение 294. Скорость 293 может указывать текущую скорость транспортного средства 291 (например, в милях в час), а ускорение 294 может указывать изменение скорости 293 (например, возрастает или убывает скорость 293). Модуль 207 связи также может принимать данные, указывающие скорость и ускорение (или замедление), из любых других транспортных средств на многополосной проезжей части дороги в пределах заданного расстояния от транспортного средства 201.
Способ 300 включает в себя определение другой полосы движения для занятия транспортным средством на основании скорости и ускорения (или замедления) транспортного средства, и скорости и ускорения (или замедления) одного или более других транспортных средств, другая полоса движения выбрана из числа одной или более других полос движения (304). Например, модуль 222 рекомендаций полосы движения может определять, что эффективнее, чтобы транспортное средство 201 занимало полосу 261 движения, на основании конфигурации 224 транспортного средства, данных 282 движения и данных 292 движения (а также данных движения из любых других транспортных средств). Модуль 222 рекомендаций полосы движения может получать рекомендацию 238 полосы движения, указывающую, что более эффективное передвижение возможно в полосе 261 движения. Модуль 222 рекомендаций полосы движения может отправлять рекомендацию 238 полосы движения в проекционную систему 209. Проекционная система 209 может принимать рекомендацию 238 полосы движения из модуля 222 рекомендаций полосы движения.
Способ 300 включает в себя воспроизведение визуализации проезжей части дороги в кабине транспортного средства, визуализация предлагает смену полосы движения на другую полосу движения, подсвечивая другую полосу движения (305). Например, камера(ы) 203 может захватывать данные 266 изображения многополосной проезжей части 200 дороги. Данные 266 изображения могут отправляться в проекционную систему 209. Данные 266 изображения могут приниматься в проекционной системе 209. Данные 266 изображения могут захватываться и отправляться в проекционную систему 209 на постоянной основе по мере того, как транспортное средство 201 передвигается по многополосной проезжей части 200 дороги.
Проекционная система 209 может формулировать HUD 236 многополосной проезжей части 200 дороги из данных 266 изображения и рекомендации 238 полосы движения. Проекционная система 209 может визуализировать HUD 236 на ветровом стекле 244 (или на другом устройстве отображения в кабине транспортного средства 201). Проекционная система 209 может дополнять данные 266 изображения, подсвечивая полосу 261 движения (например, с использованием рассеянного света, покрытия, сверкания, и т. д.) в пределах HUD 236, чтобы предлагать смену полосы движения с полосы 262 движения на полосу 261 движения. Водитель 232 может воспринимать HUD 236 на ветровом стекле 244 (или другом устройстве отображения). В одном из аспектов, HUD 236 визуализируется в пределах поля 233 зрения водителя 232. По существу, водитель 232 может сохранять обзор многополосной проезжей части 200 дороги в направлении 206, тем временем, также наблюдая HUD 236.
Способ 300 включает в себя прием ввода из кабины, одобряющего предложенную смену полосы движения (306). Например, в ответ на восприятие HUD 236, водитель 232 может желать перевести транспортное средство 201 в полосу 261 движения. Водитель 236 может вводить в действие указатель 241 поворота, чтобы указывать одобрение рекомендации перейти из полосы 262 движения в полосу 261 движения. В ответ на ввод в действие указателя 241 поворота, наружные световые сигналы на транспортном средстве 201 могут мигать в направлении полосы 261 движения. Сигнал 234 также может отправляться в систему 221 содействия смене полосы движения. Система 221 содействия смене полосы движения может принимать сигнал 234 с указателя 241 поворота. Система 221 содействия смене полосы движения воспринимает сигнал 234 в качестве одобрения рекомендации 238 полосы движения.
Способ 300 включает в себя расчет скорости для поддержания транспортным средством при переходе из текущей полосы движения в надлежащую полосу движения (307). Например, система 221 содействия смене полосы движения может рассчитывать скорость для поддержания транспортным средством 201 при переходе из полосы 262 движения в полосу 261 движения на основании данных 282 движения и данных 292 движения (а также данных движения из любых других транспортных средств на многополосной проезжей части 200 дороги). Поддержание рассчитанной скорости дает транспортному средству 201 возможность безопасно переходить из полосы 262 движения в полосу 261 движения, принимая во внимание скорость и ускорение (или замедление) окружающих транспортных средств на многополосной проезжей части 200 дороги.
Способ 300 включает в себя указание в пределах визуализации, где транспортное средство должно переходить в другую полосу движения (308). Например, модуль 223 определения местоположения может определять, что транспортному средству 201 безопасно переходить из полосы 262 движения в полосу 261 движения в месте 268. Модуль 223 определения местоположения может получать указание 239 смены полосы движения для указания места 268. Модуль 223 определения местоположения может отправлять указание 239 смены полосы движения в проекционную систему 209. Проекционная система 209 может принимать указание 239 смены полосы движения из модуля 223 определения местоположения.
Проекционная система 209 может формулировать обновление 237 HUD из данных 266 изображения и местоположения 239 смены полосы движения. Проекционная система 209 может дополнять данные 266 изображения, подсвечивая местоположение 268 (например, с использованием рассеянного света, покрытия, мерцания, и т. д.) и указывая скорость транспортного средства 281 и транспортного средства 291 (и любых других транспортных средств в полосе 261 движения в пределах заданного расстояния от транспортного средства 201) в обновлении 237 HUD. Например, число может визуализироваться над транспортным средством 281, чтобы указывать скорость транспортного средства 281 в милях в час. Подобным образом, число может визуализироваться над транспортным средством 291, чтобы указывать скорость транспортного средства 291 в милях в час.
Проекционная система 209 может визуализировать обновление HUD 237 на ветровом стекле 244 (или на другом устройстве отображения в кабине транспортного средства 201). Водитель 232 может воспринимать обновление 237 HUD на ветровом стекле 244 (или другом устройстве отображения). В аспекте, обновление 237 HUD визуализируется в пределах поля 233 зрения водителя 232. По существу, водитель 232 может сохранять обзор многополосной проезжей части 200 дороги в направлении 206, тем временем, наблюдая обновление 237 HUD.
Водитель 232 затем может использовать компоненты 211 транспортного средства, например, рулевое колесо, дроссель, и т. д., для реализации смены 267 полосы движения в полосе 261 движения в местоположении 268.
В одном из аспектов, рекомендации полосы движения выдаются на транспортном средстве 201 по существу в реальном времени, в то время как транспортное средство едет по многополосной проезжей части 200 дороги. По мере того, как транспортное средство 201 передвигается, рекомендации полосы движения могут меняться, так как изменяется окружающая обстановка движения транспорта в пределах заданного расстояния от транспортного средства 201. По мере того, как представляются рекомендации, водитель 232 может предпочитать действовать по рекомендации смены полосы движения или игнорировать рекомендацию смены полосы движения.
В некоторых аспектах, рекомендации смены полосы движения и места смены полосы движения также могут указываться водителю 232 с использованием речевого вывода. В то время как модуль 223 рекомендаций полосы движения рекомендует полосы движения, рекомендации полосы движения также могут отправляться в акустическую систему. Подобным образом, по мере того, как модуль определения местоположения определяет места смены полосы движения, места смены полосы движения могут отправляться в акустическую систему. Акустическая система может выводить речевую подсказку (например, через один или более громкоговорителей) в кабине транспортного средства 201. Речевая подсказка может оповещать водителя 232, что следует посмотреть на HUD 236, посмотреть обновление 237 HUD, и т. д.
Фиг. 4A иллюстрирует пример транспортных средств, едущих в разных полосах движения многополосной дороги 400. Обращаясь к фиг. 4A, транспортные средства 422 и 426 находятся в полосе 441 движения. Транспортные средства 401 и 423 находятся в полосе 442 движения. Транспортные средства 424 и 428 находятся в полосе 443 движения. Транспортное средство 427 находится в полосе 444 движения. Как указано стрелками, все из автомобилей, изображенных на фиг. 4A в целом движутся в одном и том же направлении. Транспортное средство 401 может быть едущим быстрее, чем транспортное средство 423. По мере того, как транспортное средство 401 приближается к транспортному средству 423 сзади, система содействия смене полосы движения в транспортном средстве 401 может определять и рекомендовать более эффективную полосу движения для проезда транспортного средства 401.
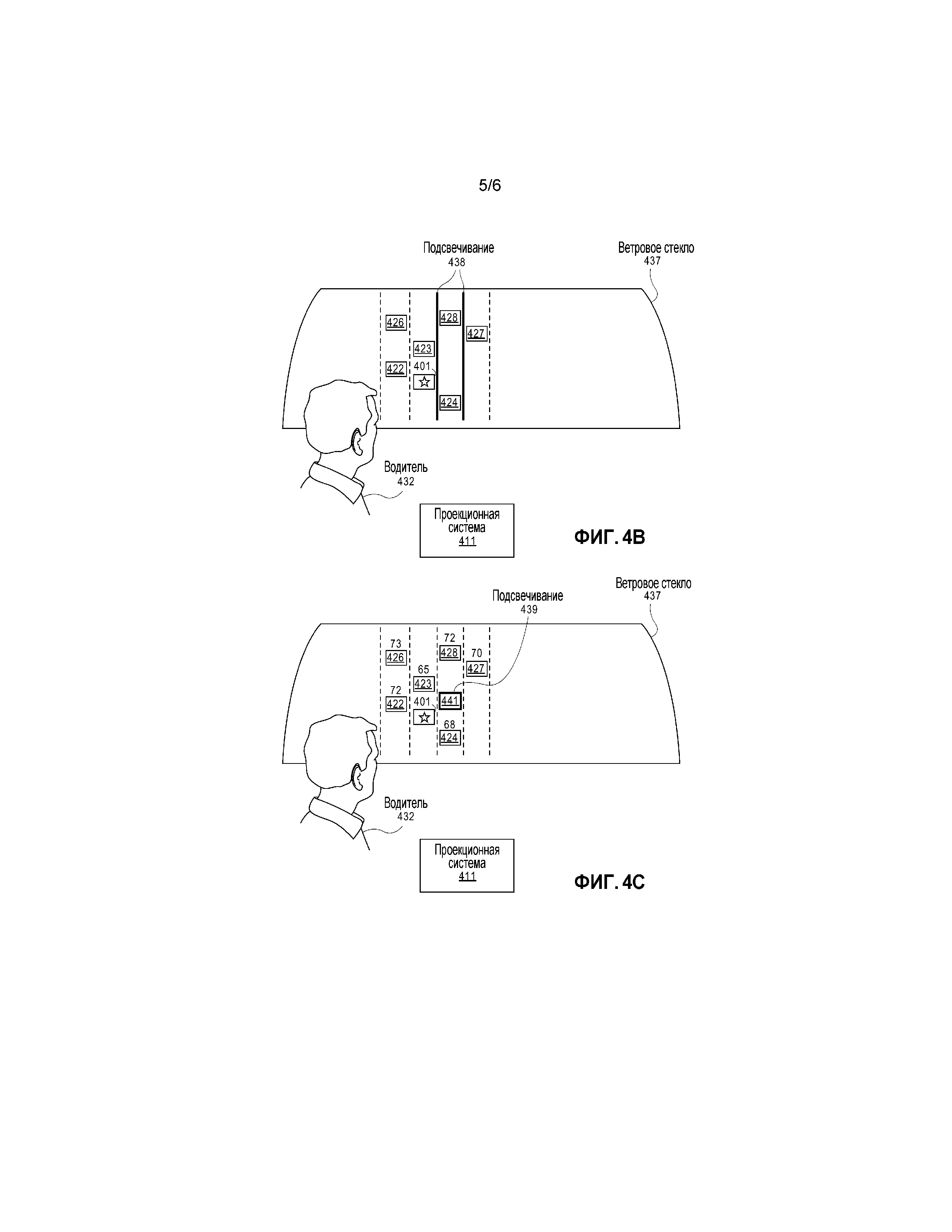
при обращении к фиг. 4B, проекционная система 411 может представлять отображение в реальном времени многополосной проезжей части 400 дороги на ветровом стекле 437. Система рекомендаций полосы движения может рекомендовать полосу 443 движения в качестве более эффективной полосы движения для проезда транспортного средства 401. Проекционная система 411 может дополнять отображение в реальном времени яркими участками 438 изображения для идентификации полосы 443 движения в качестве рекомендованной полосы движения. Транспортное средство 401 (которое ведет водитель 432 транспортного средства) может идентифицироваться с использованием отличной пиктограммы, такой как звездочка. Водитель 432 может обозревать отображение в реальном времени и пожелать перейти из полосы 442 движения в полосу 443 движения. Водитель 432 может вводить в действие правый указатель поворота в транспортном средстве 401, чтобы указывать желание перейти в полосу 443 движения.
При обращении к фиг. 4C, система содействия смене полосы движения может идентифицировать местоположение 441, где может безопасно происходить смена полосы движения с полосы 442 движения на полосу 443 движения. Проекционная система 411 может дополнять отображение в реальном времени яркими участками 439 изображения для указания места 441. Проекционная система 411 также может дополнять отображение в реальном времени скоростью других транспортных средств на многополосной дороге 400 (например, в милях в час). Кратко возвращаясь к фиг. 4A, водитель 432 затем может реализовывать смену 407 полосы движения, чтобы перемещать транспортное средство 401 из полосы 442 движения в полосу 443 движения.
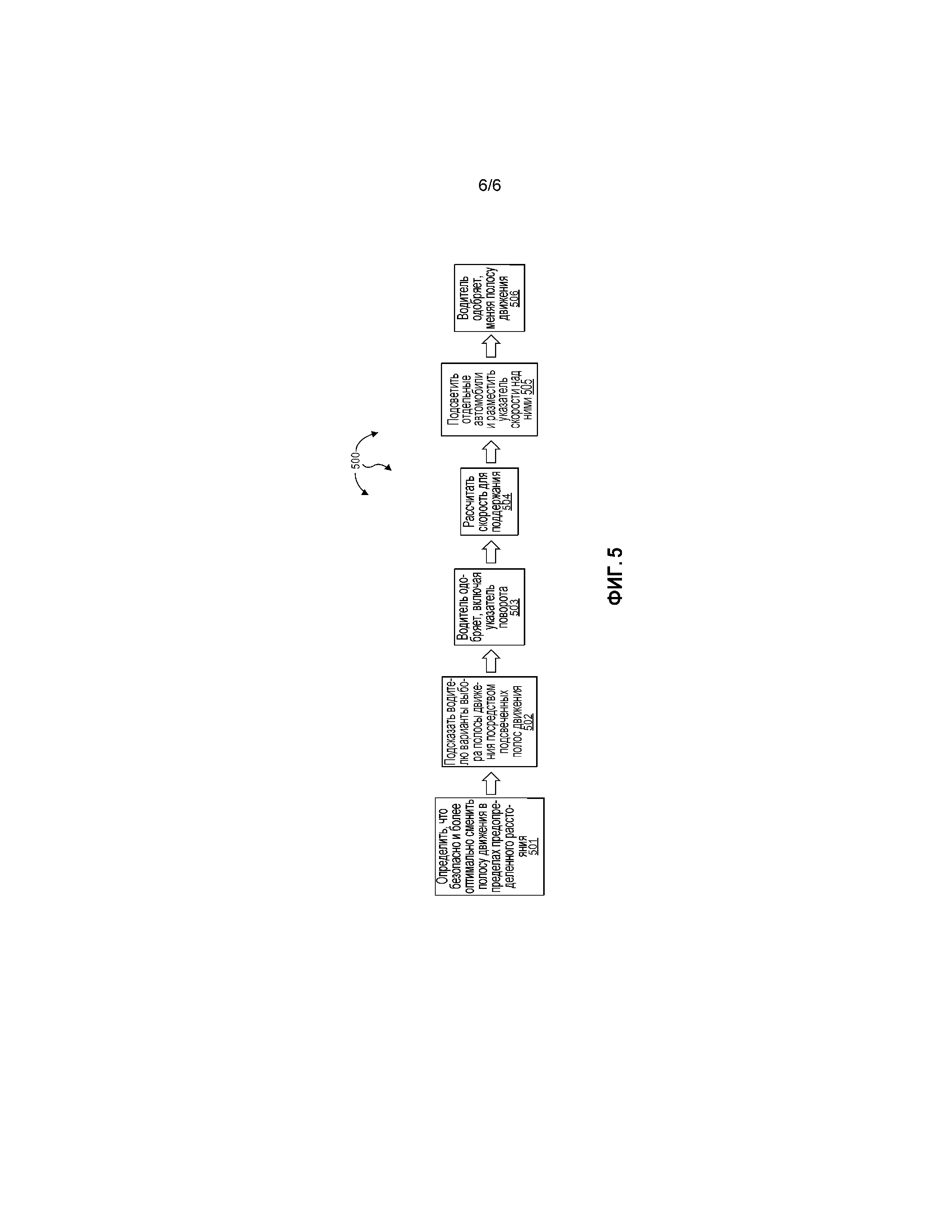
Фиг. 5 иллюстрирует поток 500 данных примерного способа для содействия водителям при смене полос движения на проезжей части дороги. На этапе 501, система содействия смене полосы движения может определять, что безопасно и более оптимально, чтобы транспортное средство меняло полосы движения в пределах предопределенного расстояния. На этапе 502, система содействия смене полосы движения может подсказывать водителю варианты выбора полосы движения посредством подсвеченных полос движения на отображении. На этапе 503, водитель может одобрять одну из полос движения, включая указатель поворота (например, левый или правый). На этапе 504, система содействия смене полосы движения может рассчитывать скорость для поддержания транспортным средством. На этапе 505, система содействия смене полосы движения может подсвечивать отдельные автомобили и размещать указатели скорости над ними на отображении. На этапе 506, водитель может одобрять вариант выбора полосы движения сменой полосы движения.
Соответственно, аспекты изобретения оказывают содействие водителю при безопасном переходе между полосами движения на многополосной проезжей части дороги в многообразии разных сценариев.
В одном из сценариев, движение транспорта на автостраде затрудняет нормальную ежедневную поездку на работу и обратно. Транспортное средство может находиться в средней полосе движения, и система содействия смене полосы движения определяет, что есть свободные полосы движения, имеющиеся в распоряжении для оптимизации ежедневной поездки на работу и обратно. Система содействия смене полосы движения выдает две свободные полосы движения, полосу движения справа и полосу движения слева. Две полосы движения подсвечиваются с использованием визуализации дополненной реальности (AR).
Водитель выбирает левую полосу движения, вводя в действие левый указатель поворота. Ввод в действие указателя поворота отправляет сообщение в систему содействия смене полосы движения. Система содействия смене полосы движения выполняет ряд расчетов, принимая во внимание скорость транспортного средства и скорости окружающих транспортных средств. Система содействия смене полосы движения идентифицирует автомобиль для въезда в поток движения впереди и автомобиль для пристраивания сзади. Автомобили подсвечиваются с использованием визуализации системы AR, и над ними появляется число, указывающее их скорость. Система AR также может указывать скорость, чтобы поддерживало транспортное средство, для того чтобы безопасно и успешно въезжать в поток движения. Водитель затем может перемещать транспортное средство в левую полосу движения. В качестве альтернативы, водитель может предпочитать не переходить в левую полосу движения. Водитель может отменять въезд в поток движения, оставаясь в текущей полосе движения или перемещая указатель поворота обратно в среднее положение.
В еще одном сценарии, более быстрому транспортному средству мешает другое более медленное транспортное средство на автостраде. Более медленное транспортное средство является более медленным вследствие незнакомства водителя с территорией и его неуверенностью в том, какой съезд выбрать. В этом сценарии, система содействия смене полосы движения определяет, что лучше перейти в другую полосу движения вместо ожидания, чтобы транспортное средство впереди ускорилось. Водитель более быстрого транспортного средства является начинающим водителем и, в нормальных обстоятельствах, скорее сохранил бы существующее положение. Однако, система содействия смене полосы движения может предоставлять начинающему водителю дополнительный уровень комфорта при переходе в более оптимальную полосу движения.
В одном из аспектов, один или более процессоров выполнены с возможностью выполнять команды (например, машинно-читаемые команды, машинно-исполняемые команды, и т. д.) для выполнения любых из множества описанных операций. Один или более процессоров могут осуществлять доступ к информации из системной памяти и/или сохранять информацию в системной памяти. Один или более процессоров могут преобразовывать информацию между разными форматами, например, такую как данные с датчиков, конфигурация транспортного средства, данные движения, скорость, ускорение (или замедление), рекомендации смены полосы движения, места смены полосы движения, HUD, обновления HUD, сигналы ввода в действие компонентов транспортного средства, расположения полосы движения данные, AR, и т. д.
Системная память может быть присоединена к одному или более процессорам и может хранить команды (например, машинно-читаемые команды, машинно-исполняемые команды, и т. д.), исполняемые одним или более процессорами. Системная память также может быть выполнена с возможностью хранить любые из множества других типов данных, сформированных описанными компонентами, например, таких как данные с датчиков, конфигурация транспортного средства, данные движения, скорость, ускорение (или замедление), рекомендации смены полосы движения, места смены полосы движения, HUD, обновления HUD, сигналы ввода в действие компонентов транспортного средства, расположения полосы движения, данные AR, и т. д.
В вышеприведенном изобретении была сделана ссылка на прилагаемые чертежи, которые формируют его часть, и на которых, в качестве иллюстрации, показаны конкретные реализации, в которых изобретение может быть осуществлено на практике. Понятно, что могут использоваться другие реализации, и структурные изменения могут быть произведены, не выходя из объема настоящего изобретения. Ссылки в описании изобретения на «один из вариантов осуществления», «вариант осуществления», «примерный вариант осуществления», и т. д., указывают, что описанный вариант осуществления может включать в себя конкретные признак, конструкцию или характеристику, но каждый вариант осуществления не обязательно может включать в себя конкретные признак, конструкцию или характеристику. Более того, такие фразы не обязательно являются указывающими ссылкой на один и тот же вариант осуществления. Кроме того, когда конкретный признак, конструкция или характеристика описаны в связи с вариантом осуществления, предполагается, что он находится в пределах познаний специалиста в данной области техники для осуществления такого признака, конструкции или характеристики в связи с другими вариантами осуществления, описанными или не описанными в прямой форме.
Реализации систем, устройств и способов, раскрытых в материалах настоящей заявки, могут содержать или использовать компьютер специального назначения или общего применения, включающий в себя компьютерные аппаратные средства, например, такие как один или более процессоров и системная память, как обсуждено в материалах настоящей заявки. Реализации в пределах объема настоящего изобретения также могут включать в себя физические и другие машинно-читаемые носители для переноса или хранения машинно-исполняемых команд и/или структур данных. Такие машиночитаемые носители могут быть любыми имеющимися в распоряжении носителями, к которым может осуществляться доступ компьютерной системой общего применения или специального назначения. Машинно-читаемые носители, которые хранят машинно-исполняемые команды, являются компьютерными запоминающими носителями (устройствами). Машинно-читаемые носители, которые переносят машинно-исполняемые команды, являются средой передачи данных. Таким образом, в качестве примера, а не ограничения, реализации изобретения могут содержать по меньшей мере две отчетливо разных разновидности машинно-читаемых носителей: компьютерные запоминающие носители (устройства) и среду передачи данных.
Компьютерные запоминающие носители (устройства) включают в себя ОЗУ (оперативное запоминающее устройство, RAM), ПЗУ (постоянное запоминающее устройство, ROM), ЭСППЗУ (электрически стираемое программируемое ПЗУ, EEPROM), CD-ROM (ПЗУ на компакт-диске), твердотельные накопители («SSD») (например, на основе ОЗУ), флэш-память, память на фазовых переходах («PCM»), другие типы памяти, другое оптическое дисковое запоминающее устройство, магнитное дисковое запоминающее устройство или другие магнитные устройства хранения данных, либо любой другой носитель, который может использоваться для хранения требуемого средства управляющей программы в форме машинно-исполняемых команд или структур данных, и к которым может осуществляться доступ компьютером общего применения или специального назначения.
Реализация устройств, систем и способов, раскрытых в материалах настоящей заявки, может поддерживать связь через компьютерную сеть. «Сеть» определена в качестве одного или более каналов передачи данных, которые делают возможной транспортировку электронных данных между компьютерными системами и/или модулями, и/или другими электронными устройствами. Когда информация переносится или поставляется через сеть или другое соединение связи (проводное, беспроводное, либо комбинацию проводного или беспроводного) в компьютер, компьютер, по сути, рассматривает соединение в качестве среды передачи данных. Среда передачи данных может включать в себя сеть и/или каналы передачи данных, которые могут использоваться для переноса требуемого средства управляющей программы в форме машинно-читаемых команд или структур данных, и к которым может осуществляться доступ компьютером общего применения или специального назначения. Комбинации приведенного выше также должны быть включены в объем машинно-читаемых носителей.
Машинно-исполняемые команды, например, содержат команды и данные, которые, когда выполняются на процессоре, побуждают компьютер общего применения, компьютер специального назначения или устройство обработки специального назначения выполнять некоторую функцию или группу функций. Машинно-исполняемые команды, например, могут быть двоичным кодом, командами промежуточного формата, такими как на языке ассемблера, или даже исходным кодом. Хотя предмет изобретения был описан на языке, специфичном структурным признакам и/или действиям обобщенных способов, должно быть понятно, что предмет изобретения, определенный в прилагаемой формуле изобретения, не обязательно ограничен описанными признаками или действиями, описанными выше. Скорее, описанные признаки и действия раскрыты в качестве примерных форм реализации формулы изобретения.
Специалисты в данной области техники будут принимать во внимание, что изобретение может быть осуществлено на практике в сетевых вычислительных средах с другими типами конфигураций компьютерных систем, включая встроенный в приборный щиток или другой компьютер транспортного средства, персональные компьютеры, настольные компьютеры, дорожные компьютеры, процессоры сообщений, карманные устройства, многопроцессорные системы, основанную на микропроцессорах или программируемую бытовую электронику, сетевые ПК (персональные компьютеры), миникомпьютеры, универсальные компьютеры, мобильные телефоны, PDA (персональные цифровые секретари), планшеты, пейджеры, маршрутизаторы, коммутаторы, различные запоминающие устройства, и тому подобное. Изобретение также может быть осуществлено на практике в средах распределенной системы, где локальные и удаленные компьютерные системы, которые связаны (проводными каналами передачи данных, беспроводными каналами передачи данных или комбинацией проводных и беспроводных каналов передачи данных) через сеть, те и другие выполняют задания. В среде распределенной системы, программные модули могут быть расположены как в локальном, так и в удаленном запоминающих устройствах памяти.
Кроме того, где уместно, функции, описанные в материалах настоящей заявки, могут выполняться в одном или более из: аппаратных средств, программного обеспечения, встроенных программ, цифровых компонентов или аналоговых компонентов. Например, одна или более специализированных интегральных схем (ASIC) могут быть запрограммированы выполнять одну или более из систем и процедур, описанных в материалах настоящей заявки. Определенные термины используются на всем протяжении описания и формулы изобретения для указания ссылкой на конкретные компоненты системы. Как будет принимать во внимание специалист в данной области техники, компоненты могут указываться ссылкой разными наименованиями. Данный документ не подразумевает, что следует проводить различие между компонентами, которые отличаются по наименованию, но не по функции.
Следует отметить, что варианты осуществления датчиков, обсужденные выше, могут содержать компьютерные аппаратные средства, программное обеспечение, встроенные программы или любую их комбинацию для выполнения по меньшей мере части своих функций. Например, датчик может включать в себя машинный код, выполненный с возможностью выполняться на одном или более процессоров, и может включать в себя аппаратные логические/электрические схемы, управляемые машинным кодом. Эти примерные устройства предусмотрены в материалах настоящей заявки в целях иллюстрации и не подразумеваются ограничивающими. Варианты осуществления настоящего изобретения могут быть реализованы в дополнительных типах устройств, как было бы известно специалистам в данной области(ях) техники.
По меньшей мере некоторые варианты осуществления изобретения были направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), хранимую на любом используемом компьютером носителе. Такое программное обеспечение, когда выполняется в одном или более устройств обработки данных, побуждает устройства действовать, как описано в материалах настоящей заявки.
Несмотря на то, что выше были описаны варианты осуществления настоящего изобретения, должно быть понятно, что они были представлены только в качестве примера, а не ограничения. Специалистам в данной области техники будет очевидно, что различные изменения по форме и содержанию могут быть произведены в нем, не выходя из сущности и объема изобретения. Так, широту и объем настоящего изобретения не следует ограничивать никакими из вышеописанных вариантов осуществления, но следует определять только в соответствии с нижеследующей формулой изобретения и ее эквивалентами. Вышеизложенное описание было представлено в целях иллюстрации и описания. Оно не подразумевается исчерпывающим или ограничивающим изобретение точной раскрытой формой. Многие модификации и варианты возможны в свете вышеприведенной доктрины. Кроме того, следует обратить внимание, что любые или все из вышеупомянутых альтернативных реализаций могут использоваться в любой комбинации, требуемой для формирования дополнительных смешанных реализаций изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)

