Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОДЪЕМА И СПОСОБ ПОЗИЦИОНИРОВАНИЯ МЕЛЬНИЦЫ ИЗМЕЛЬЧЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к мельницам измельчения, в частности, к способу определения угла α подъема загрузки внутри мельницы и способу позиционирования корпуса мельницы.
Уровень техники
Мельницы измельчения, в частности шаровые мельницы, стержневые мельницы, мельницы самоизмельчения, мельницы полусамоизмельчения, мельницы доизмельчения и галечные мельницы, широко используются при измельчении цемента или руды в мелкие частицы. Эти мельницы обычно имеют цилиндрический корпус мельницы, в котором содержится материал, подлежащий измельчению. Помимо указанного материала, загрузка мельницы может содержать мелющие тела, например, металлические или керамические шары, гальку или стержни, транспортирующую среду, например, воду, или и то и другое.
Мельницы приводятся в движение косвенно с помощью высокоскоростного электродвигателя и редуктора для уменьшения частоты вращения, в частности, с помощью приводов мельниц с зубчатыми венцами с одной или двумя шестернями, или они приводятся в действие непосредственно низкоскоростным двигателем, также известным как безредукторный привод мельницы, который обычно представляет собой кольцевой двигатель с ротором, непосредственно соединенным с корпусом мельницы. Диаметр корпуса мельницы обычно составляет 5-15 метров. Мельницы измельчения с приводом с зубчатыми венцами обычно имеют мощность привода 1-15 МВт. Безредукторные мельницы измельчения обычно имеют мощность привода 3,5-36 МВт. Привод мельницы с зубчатыми венцами описан в US-2931583 А. Безредукторный привод мельницы описан в US-3272444 А.
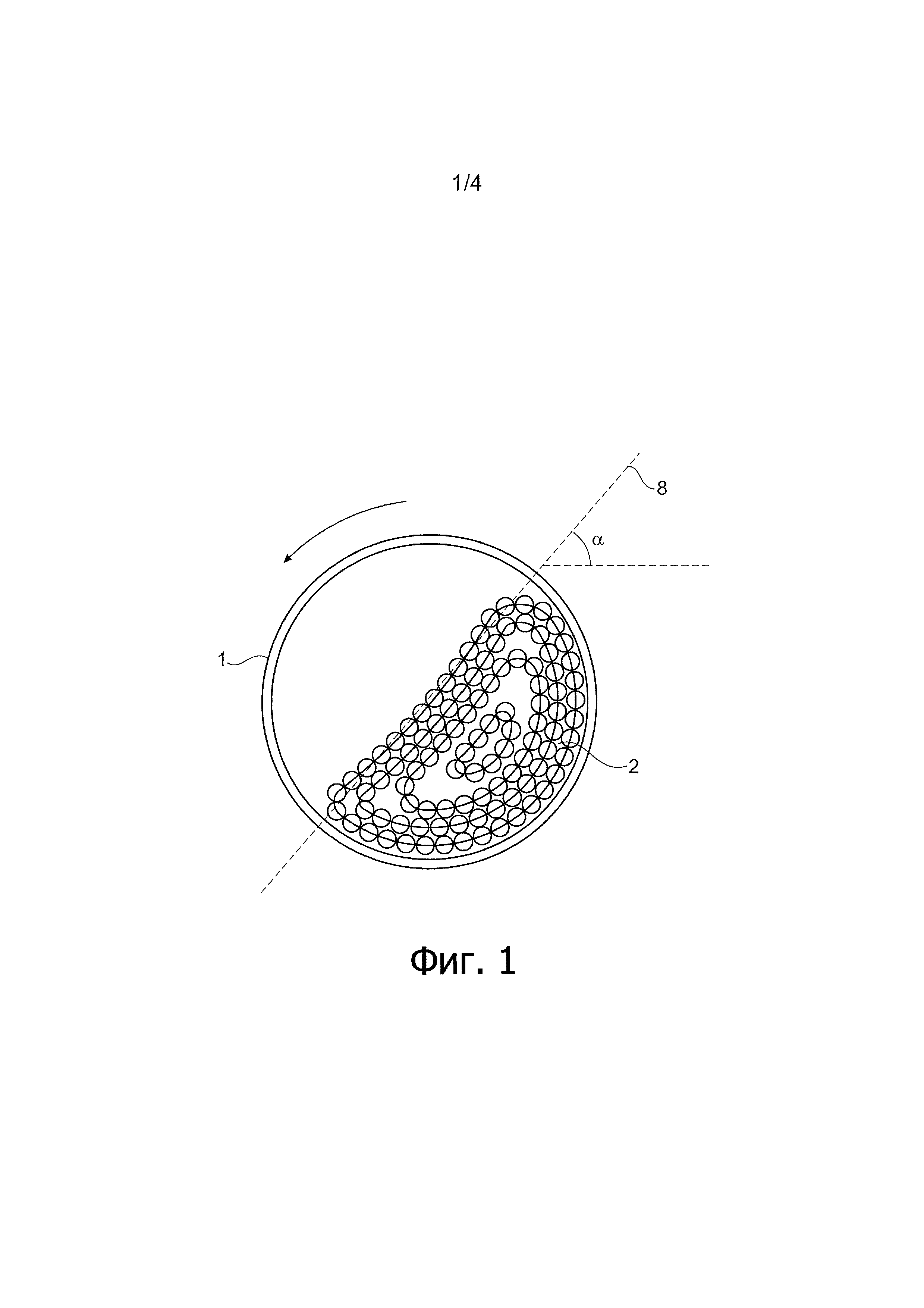
Как показано на фиг. 1, когда корпус 1 мельницы вращается во время работы в непрерывном режиме (вращение показано стрелкой), загрузка 2 внутри корпуса 1 мельницы непрерывно поднимается по боковой стороне корпуса 1 мельницы в точку, где загрузка 2 непрерывно опускается каскадами на другую сторону корпуса 1 мельницы. В результате поверхность загрузки 2, приблизительно соответствующая плоскости 8, и горизонтальное направление 9 определяют угол α подъема.
При запуске мельницы из состояния покоя загрузка поднимается, но не перемещается из-за трения. При некотором угле αс подъема сила тяжести превышает трение, в результате чего материал образует каскады. Поведение загрузки после начала работы в каскадном режиме сильно зависит от ряда факторов, таких как продолжительность состояния покоя, шаровая загрузка или тип материала, подлежащего измельчению. Загрузка может или в значительной степени скатываться вниз после образования каскадов, что ведет к возникновению более низкого угла подъема (α<αc) или угол подъема может оставаться достаточно стабильным (α≈αc).
Когда в корпусе мельницы находится загрузка, сложно осуществить точное позиционирование мельницы измельчения. Точное позиционирование является весьма важным во время технического обслуживания мельницы, например, во время замены изношенной футеровки. Когда мельница вращается, центр тяжести загрузки не выровнен по вертикали с центром корпуса мельницы из-за угла подъема в результате вращения. Следовательно, загрузка находится в неуравновешенном положении. Это приводит к обратному вращению корпуса мельницы при остановке с целью прикладывания момента к корпусу мельницы с помощью привода. Обратное вращение происходит в противоположном направлении по отношению к вращению, вызываемому моментом привода. Обычно корпус мельницы колеблется назад и вперед в течение нескольких минут из-за высокой инерции корпуса мельницы до тех пор, пока центр тяжести загрузки не выровняется по вертикали с центром корпуса мельницы в состоянии покоя корпуса мельницы. Это явление также известно как откатывание, качание или колебание.
Как описано в Brochure, Siemens, Mining, ноябрь 2006 г., «Режимы эксплуатации мельницы измельчения с безредукторным приводом», стр. 6, пар. «Медленное вращение», известно о позиционировании мельницы под заданным углом βg посредством остановки мельницы до состояния покоя и последующем начале вращения мельницы и измерении угла αc каскадного режима. Мельница продолжает вращаться до тех пор, пока не будет достигнут суммарный угол из заданного угла и угла каскадного режима. Затем привод поворачивает мельницу назад, используя регулирование момента, до тех пор, пока момент не станет равным нулю. Это ведет к тому, что загрузка будет находиться в уравновешенном положении, не вызывая откатывания или колебаний. Однако точность зависит от допущения, что фактический угол подъема во время поворачивания назад равен углу каскадного режима. Как описано выше, это допущение в лучшем случае является хорошим приближенным расчетом, что ведет к немного неточному позиционированию даже в благоприятном случае, что угол подъема остается достаточно стабильным после функционирования в каскадном режиме (α≈αc).
Раскрытие сущности изобретения
Задача настоящего изобретения состоит в том, чтобы предложить способ определения угла подъема загрузки внутри мельницы измельчения в конкретный момент времени и способ позиционирования мельницы измельчения, который является более точным.
Согласно изобретению, относительный угол подъема и относительный движущий момент определяют во время вращения мельницы. Оба значения определяют в один и тот же относительный момент времени и образуют пару значений, которые соответствуют друг другу. Значение относительного движущего момента можно определить или приблизительно рассчитать различными путями, например, используя датчик момента или ток двигателя. На основании пары указанных значений рассчитывают коэффициент заполнения. Коэффициент заполнения приблизительно является постоянным во время вращения мельницы и суммирует или объединяет различные характеристики загрузки, например, массу, объем, геометрическую форму. Уравнения для расчета коэффициента заполнения представляет собой уравнение модели, полученное из равновесия сил и моментов сил, рассчитанных для модели используя различные упрощения, например, равномерное распределение массы в осевом, радиальном и касательном направлениях, отсутствие изменений в загрузке внутри мельницы, постоянную частоту вращения мельницы. Следовательно, уравнение для расчета коэффициента заполнения может варьироваться в зависимости от требуемого уровня точности и условий эксплуатации и может потребовать дополнительных входных значений, например, изменения загрузки внутри корпуса мельницы. Угол подъема в конкретный момент времени определяется посредством определения значения движущего момента в конкретный момент времени и расчета угла подъема, используя указанное значение движущего момента и коэффициента заполнения. Движущий момент в конкретный момент времени можно определить или приблизительно рассчитать различными путями, например, используя датчик момента или ток двигателя. Таким образом, можно объединить ряд параметров, относящихся к углу подъема, в форме коэффициента заполнения, использовать исходную точку для определения указанного коэффициента заполнения и использовать коэффициент заполнения и движущий момент для вычисления изменений угла подъема.
По первому предпочтительному варианту выполнения изобретения текущее значение движущего момента после относительного момента времени используют для непрерывного расчета текущего угла подъема в рабочем режиме или в режиме реального времени, где значения движущего момента используют для расчета угла подъема непосредственно после того, как они становятся доступными в отличие от задержки расчета для более позднего момента времени.
Способ позиционирования корпуса мельницы измельчения с заданным углом поворота содержит этапы, на которых:
a) поворачивают корпус мельницы до некоторого угла поворота;
b) рассчитывают соответствующий угол подъема для момента времени, когда корпус мельницы достигает указанного угла поворота, используя вышеуказанный способ определения угла подъема загрузки внутри мельницы измельчения;
c) повторяют этапы (а)-(b) до тех пор, пока указанный угол поворота минус соответствующий угол подъема не станет равным указанному заданному углу поворота;
d) устанавливают движущий момент на ноль после достижения указанного угла поворота, который удовлетворяет условию этапа (с).
Во втором варианте, способ позиционирования корпуса мельницы измельчения с заданным углом поворота содержит этапы, на которых:
a) поворачивают корпус мельницы до некоторого угла поворота;
b) рассчитывают соответствующий угол подъема в момент времени, когда корпус мельницы достигает указанного угла поворота, используя вышеуказанный способ определения угла подъема загрузки внутри мельницы измельчения;
c) повторяют этапы (а)-(b) до тех пор, пока величина разности между указанным углом поворота и соответствующим ему углом подъема не станет равной указанному заданному углу поворота;
d) поворачивают назад корпус мельницы, используя приводной механизм, на указанную величину угла подъема после достижения указанного угла поворота, который удовлетворяет условию этапа (с).
Приводной механизм регулируют по движущему моменту при повороте назад корпуса мельницы, и приводной механизм останавливает вращение, когда движущий момент достигает нуля.
Краткое описание чертежей
Ниже приведено подробное описание предмета изобретения со ссылкой на предпочтительные иллюстративные варианты выполнения, представленные на приложенных чертежах, на которых схематически показаны:
фиг. 1 - непрерывно вращающийся корпус мельницы, известный из уровня техники, заполненный загрузкой, в радиальном сечении, перпендикулярном оси вращении корпуса мельницы;
фиг. 2-9 - последовательность изображений корпуса мельницы с загрузкой в радиальном сечении, перпендикулярном оси вращении корпуса мельницы во время этапов процедуры технического обслуживания корпуса мельницы, используя способ позиционирования корпуса мельницы под конкретными углами по изобретению; и
фиг. 10 - графическое представление движущего момента по отношению к углу вращения корпуса мельницы после пуска мельницы из состояния покоя в уравновешенном положении.
Номера позиций, используемые на чертежах, и их наименования перечислены в суммарной форме в перечне номеров позиций. В принципе, идентичные части обозначены на фигурах одинаковыми номерами позиций.
Подробное описание изобретения
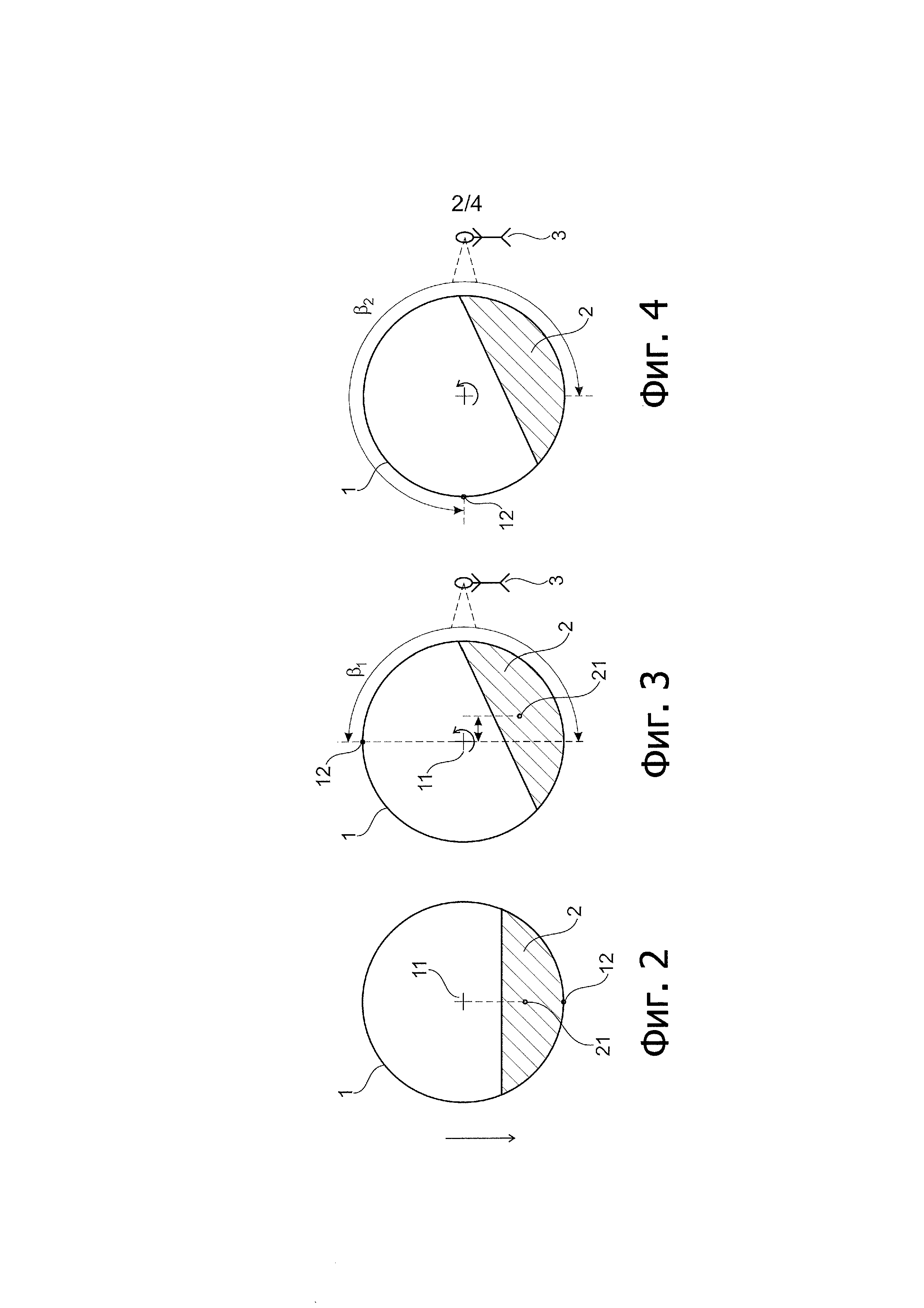
На фиг. 2 корпус 1 мельницы заполнен загрузкой 2 и находится в уравновешенном положении, так что центр 21 тяжести загрузки 2 вертикально выровнен с центром 11 вращения корпуса 1 мельницы (поле тяжести в вертикальном направлении обозначено стрелкой). Следовательно, сила тяжести загрузки 2 не вызывает создания момента в осевом направлении, который вызвал бы вращение корпуса 1 мельницы. Корпус 1 мельницы находится в состоянии покоя, т.е. корпус 1 мельницы не вращается, и частота вращения равна нулю. Корпус 1 мельницы имеет контрольную точку 12 вращения.
На фиг. 3 показан корпус 1 мельницы, который начал вращаться за счет прикладывания движущего момента к корпусу 1 мельницы (вращение, обозначенное стрелкой вокруг центра 11 вращения корпуса 1 мельницы). Благодаря вращению, загрузка 2 находится в неуравновешенном положении, где центр 21 тяжести загрузки 2 не выровнен вертикально с центром 11 вращения корпуса 1 мельницы, так что существует плечо кручения силы тяжести загрузки относительно центра 11 вращения корпуса 1 мельницы (плечо кручения обозначено другой стрелкой с двумя остриями). Результирующий момент, вызываемый силой тяжести, увеличивается с увеличением угла α подъема загрузки 2, поскольку плечо кручения увеличивается с увеличением угла α подъема. Результирующий момент направлен в противоположном направлении относительно движущего момента и должен компенсироваться движущим моментом, чтобы корпус мельницы продолжал вращаться.
Первая воображаемая прямая линия, соединяющая центр 11 вращения корпуса 1 мельницы и контрольную точку 12 вращения, вместе со второй воображаемой прямой линией, соединяющей центр 11 вращения корпуса 1 мельницы с исходным положением контрольной точки 12 вращения, образуют угол β, который определяет положение вращения корпуса 1 мельницы.
Во время вращения корпуса 1 мельницы оператор 3 мельницы выполняет визуальный контроль наружной стороны корпуса 1 мельницы. Для того чтобы оператор имел достаточно времени для выполнения указанного визуального контроля, частота вращения корпуса 1 мельницы при таком контроле обычно намного ниже номинальной частоты вращения мельницы. Такое вращение с низкой скоростью также именуют медленным вращением или медленным поворачиванием. Что касается мельницы с прямым приводом мельницы, существует возможность использования самого указанного прямого привода для медленного вращения корпуса 1 мельницы. Что касается мельницы с приводом с зубчатыми венцами, часто необходимо использовать вспомогательный привод для медленного вращения. Во время контроля оператор 3 обращает внимание на участки корпуса 1 мельницы, которые требуют технического обслуживания. Оператор 3 определяет угловые положения, в которых корпус 1 мельницы должен остановиться для выполнения технического обслуживания, и соответствующий угол β. В этом конкретном примере угол β1 составляет приблизительно 180°.
На фиг. 4 показан корпус 1 мельницы, который повернулся дополнительно по сравнению с изображением на фиг. 3. В этой части корпуса 1 мельницы оператор 3 обращает внимание на другой участок, который требует технического обслуживания. В этом конкретном примере соответствующий угол β2 составляет приблизительно 270°.
Вращение корпуса 1 мельницы можно продолжать для идентификации большего числа участков корпуса 1 мельницы, которые требуют технического обслуживания, и соответствующих угловых положений в виде угла β.
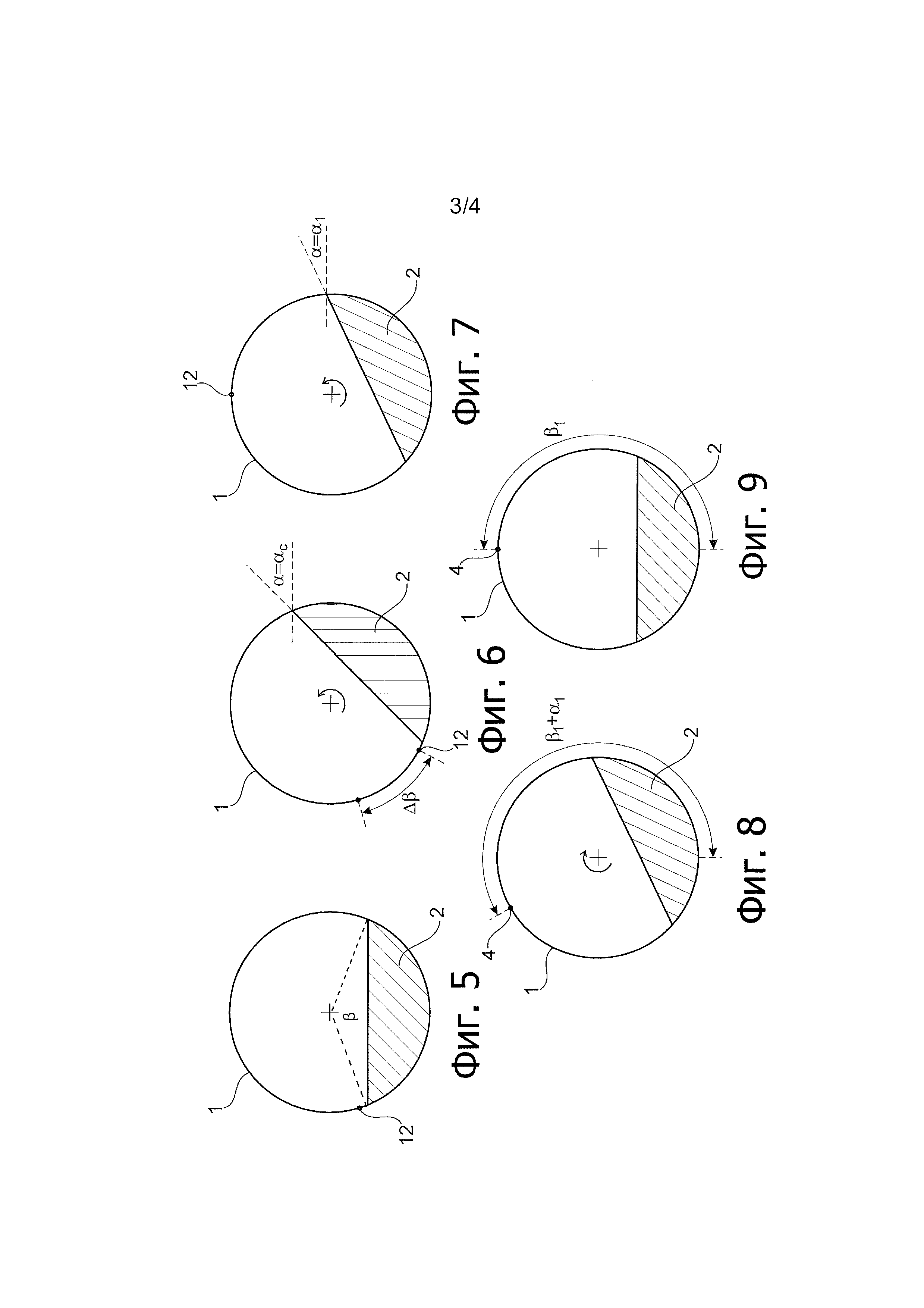
На фиг. 5 показан остановленный корпус 1 мельницы. Угловое положение этой точки остановки не является значимым фактором. Контрольная точка 12 вращения находится в произвольном положении. Таким образом, оператор завершил контроль корпуса 1 мельницы и определил как требуемые точки останова, так и соответствующие углы β1, β2. Загрузка снова находится в уравновешенном положении и в состоянии покоя.
На фиг. 6 показан корпус 1 мельницы, который снова начал вращаться. Загрузка 2 поднимается не в каскадном режиме до тех пор, пока угол подъема не достигнет критического значения угла α=αс каскадного режима. Поскольку загрузка 2 не находится в каскадном режиме, угол α подъема равен углу Δβ. Угол Δβ определяется различием между текущим угловым положением контрольной точки 12 и указанным произвольным положением контрольной точки 12 вращения в состоянии покоя из фиг. 5. Значение угла Δβ часто получают как приближенную величину для угла α подъема перед каскадным режимом функционирования загрузки 2 из соответствующих расчетов на основании значений угла поворота исходя из управления двигателем. Ток двигателя, который является величиной, легко доступной исходя из управления двигателем, часто используют для приблизительного расчета движущего момента М. Однако также существует возможность использования другого способа получения значения движущего момента М и угла Δβ, например, с помощью наружных датчиков.
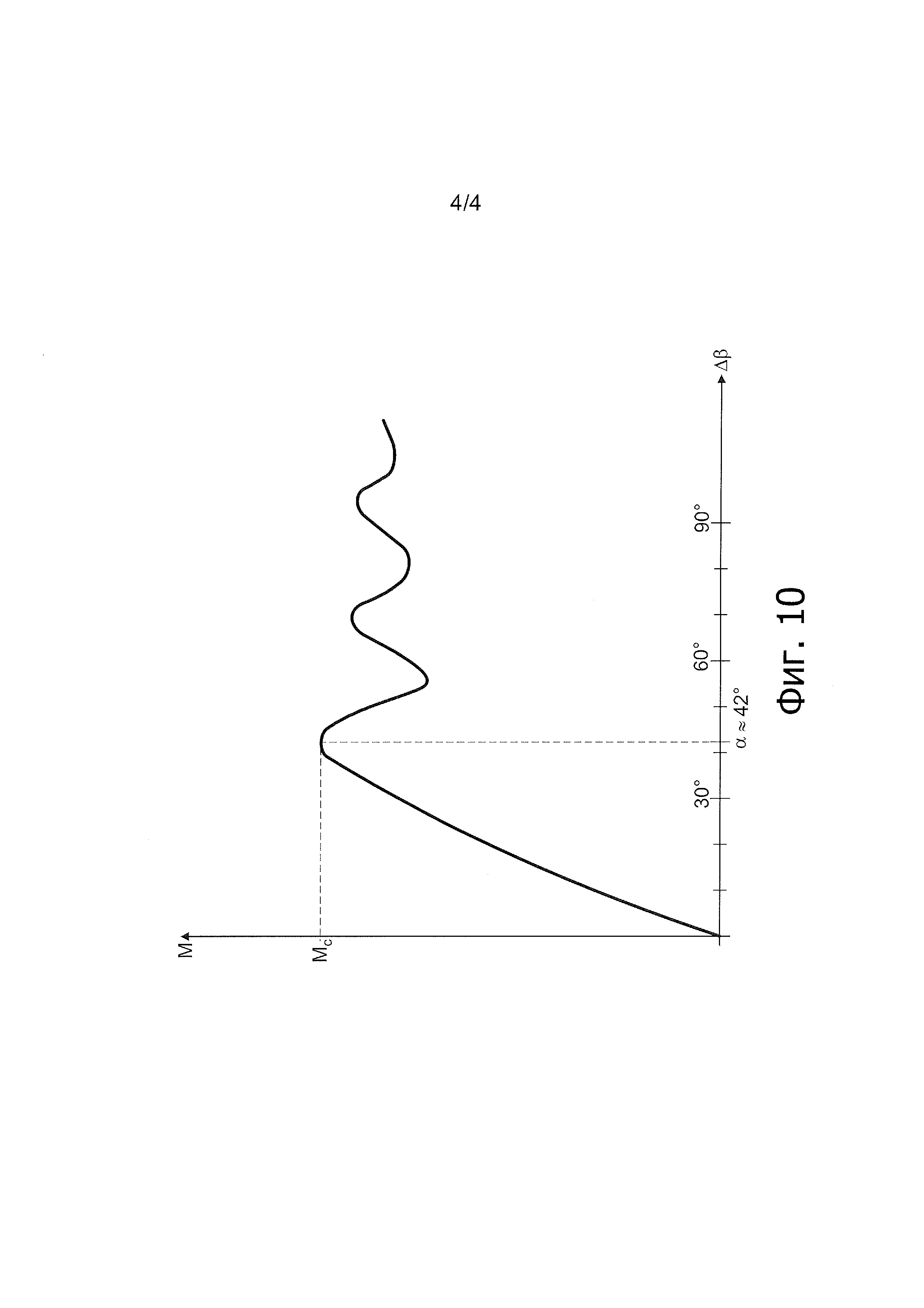
На фиг. 10 показано взаимосвязь движущего момента М и угла Δβ для периода времени между состоянием покоя из фиг. 5 (Δβ=0) и углом Δβ приблизительно 90°. Начиная с Δβ=α=0, движущий момент непрерывно увеличивается за счет подъема загрузки 2 и увеличения вертикальной несоосности центра 21 тяжести загрузки 2 и центра 11 вращения корпуса 1 мельницы, что ведет к увеличению момента в направлении, противоположном движущему моменту, что вызвано силой тяжести загрузки. Когда загрузка 2 начинает действовать в каскадном режиме, движущий момент больше не продолжает увеличиваться, поскольку угол α подъема больше не увеличивается. Таким образом, плечо кручения между центром 21 тяжести загрузки 2 и центром 11 вращения корпуса 1 мельницы больше не увеличивается. После этого момента движущий момент колеблется в районе среднего значения, по меньшей мере, в первый переходный период, из-за отсутствия непрерывности каскадного процесса или отсутствия непрерывности, связанного с выступами подъемника (не показаны) внутри корпуса 1 мельницы, где подъемные выступы способствуют подъему загрузки 2.
Существует возможность приблизительного расчета угла αс каскадного режима, который должен быть равен углу Δβ, при котором движущий момент увеличивается не больше чем на предварительно заданное приращение. Как вариант, существует возможность использования графического анализа движущего момента и графического определения начала колебания. В конкретном примере на фиг. 10 угол αс каскадного режима приблизительно равен 42°. Соответствующий движущий момент равен Мс.
Как вариант, контрольный угол подъема может быть определен оптическим путем, например, с помощью лазерного измерения или камеры. Эти средства определения контрольного угла подъема также можно использовать в контрольной точке в момент времени, который не относится к началу функционирования в каскадном режиме.
С помощью угла αc каскадного режима в качестве угла подъема при наступлении каскадного режима и соответствующего движущего момента Мс можно рассчитать коэффициент заполнения K для момента времени, когда начинает действовать каскадный режим, используя, например, уравнение модели для расчета коэффициента, как указано ниже, причем указанная модель предусматривает следующие допущения: равномерное распределение массы в осевом, радиальном и касательном направлениях, отсутствие изменений в загрузке внутри мельницы и постоянная частота вращения мельницы (β: см. фиг.2):
М=m*g*r*cos(β/2)*sin (α)
K=константа=М/sin(α)=Мс/sin (αс).
Другое уравнение модели, учитывающее изменение в загрузке внутри мельницы (m0: исходная масса, Δm: изменение массы):
М=(m0-Δm)*g*(4*r*sin(β/2))/(3*β-3*sin(β))*sin (α)
K=константа=М/((m0-Δm)*sin (α)).
Начало каскадного режима используется в качестве контрольной точки, где известны контрольный угол αr подъема (αr=αс) и контрольный движущий момент Мr (Мr=Мс). Также можно использовать другие формулы, которые, например, учитывают варьирование со временем количества загрузки внутри корпуса мельницы. Для использования вышеуказанного уравнения желательно сохранять постоянной величину загрузки, например, исключая подачу и извлечение материала из корпуса мельницы.
На фиг. 7 показан корпус 1 мельницы, который повернулся дополнительно по сравнению с началом каскадного режима на фиг. 6. Текущий угол α1 подъема может отличаться от начала каскадного режима, где угол α подъема был равен углу αс каскадного режима. В этом конкретном примере загрузка 2 в значительной степени скатилась вниз, так что текущий угол α1 подъема меньше угла αс каскадного режима. Поскольку, как известно, текущий движущий момент равен М1, например, исходя из тока двигателя при управлении двигателем, можно рассчитать текущий угол α1 подъема в реальном времени, используя, например, уравнение
α1=arcsin (M1/K).
Текущий угол α подъема можно рассчитать для каждого момента времени от начала каскадного режима.
Для точного позиционирования корпуса 1 мельницы в конкретном угловом положении β1 корпус 1 мельницы поворачивается в такое угловое положение, что текущее угловое положение β минус текущий угол α подъема равно указанному конкретному угловому положению β1.
β-α=β1.
После достижения заданного углового положения β1 где выполнено вышеуказанное условие, мельницу останавливают и поворачивают в противоположном направлении на величину фактического угла подъема в момент остановки корпуса мельницы. После этого заданный движущий момент будет равен нулю. Загрузка 2 находится в уравновешенном состоянии, и не происходит никакого вращения корпуса 1 мельницы, так что корпус 1 мельницы остается в конкретном угловом положении β1.
После завершения технического обслуживания в конкретном угловом положении β1 можно заново запустить вращение корпуса 1 мельницы и повторить процедуру, показанную на фиг. 8 и 9, для остановки корпуса 1 мельницы в другом конкретном угловом положении β2. Угол αc каскадного режима или коэффициент K заполнения необязательно рассчитывать заново.
Перечень ссылочных позиций
1 - корпус мельницы
11 - центр вращения корпуса мельницы
12 - контрольная точка вращения корпуса мельницы
2 - загрузка
21 - центр тяжести загрузки
3 - оператор
8 - плоскость поверхности загрузки
α, α1 - угол подъема
αс - угол каскадного режима
β, β1, β2 - угол поворота корпуса мельницы
Δβ - разность между текущим угловым положением контрольной точки вращения корпуса мельницы и положением этой точки в состоянии покоя
М - движущий момент
Мс - движущий момент в каскадном режиме.
Способ работы преобразователя и устройство для осуществления способа
Электрическое соединительное устройство и соединитель
Пусковое устройство, по меньшей мере, для двух синхронных машин
Энергосистема
Способ и устройство для отделения налипшего материала от шаровой барабанной мельницы
Способ управления преобразовательной схемой и устройство для его осуществления
Способ компенсации паразитных токов в электрической системе и устройство для компенсации паразитных токов
Прямой преобразователь и система с таким прямым преобразователем
Мельница с передатчиком крутящего момента
Способ работы преобразовательной схемы и устройство для его осуществления

