Результат интеллектуальной деятельности: ИНДУКТИВНЫЙ ДАТЧИК ТОКА
Вид РИД
Изобретение
Изобретение относится к области индуктивных датчиков тока.
Уровень техники
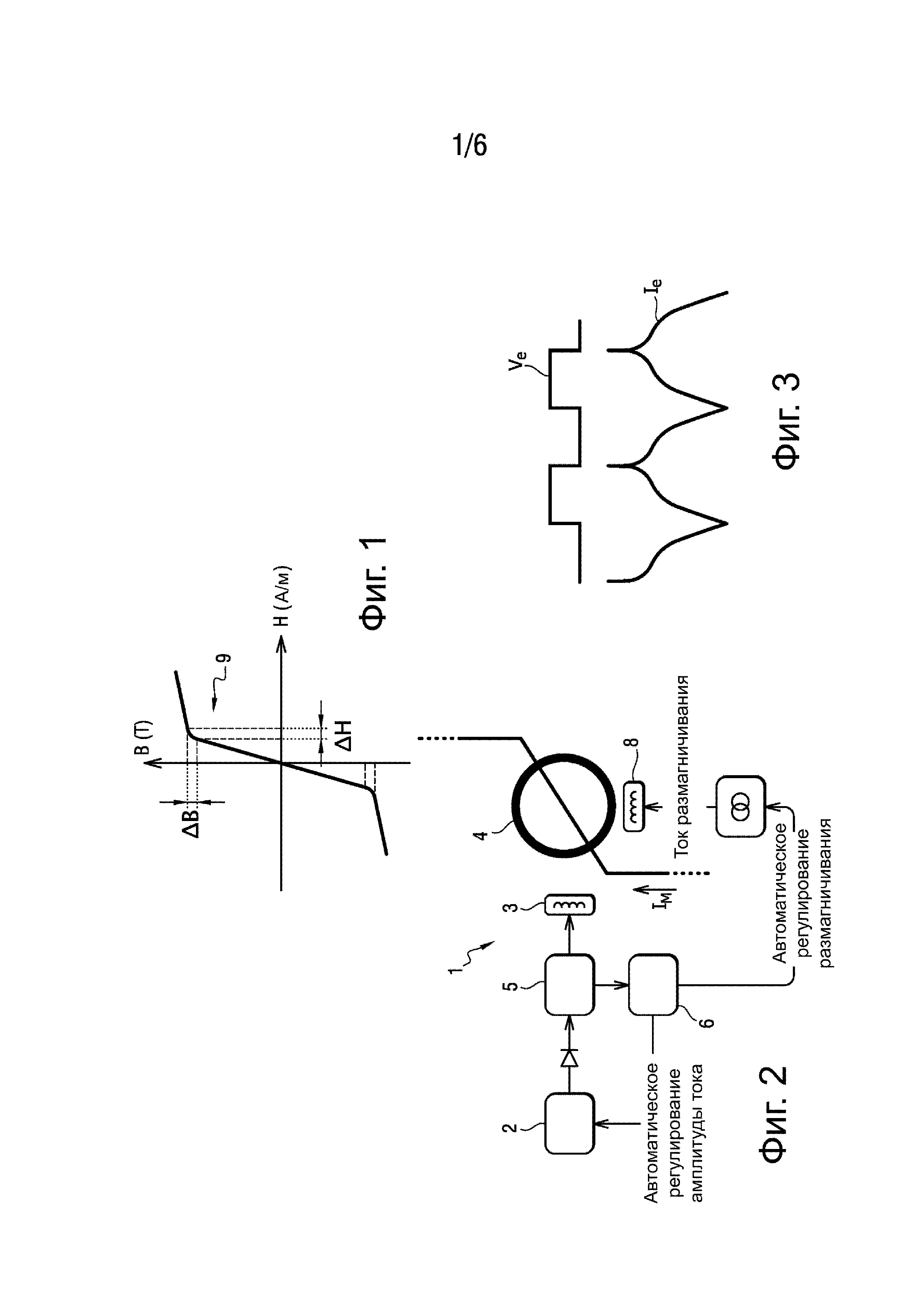
В индуктивном датчике тока используют свойство магнитного материала, образующего магнитный сердечник, который может насыщаться, начиная от определенного уровня магнитного возбуждения. Как показано на фиг. 1, для увеличивающегося магнитного поля Н крутизна функции перехода между магнитным полем Н и магнитной индукцией В значительно уменьшается, начиная от так называемого значения насыщения магнитного сердечника. На фиг. 1 значение насыщения соответствует интервалам ΔА и ΔВ.
Как показано на фиг. 2 и 3, в классическом индуктивном датчике 1 тока, предназначенном для измерения тока Im, проходящего в проводнике, генератор 2 сигналов прямоугольной формы подает напряжение возбуждения Ve прямоугольной формы на клеммы обмотки 3 возбуждения, намотанной вокруг магнитного сердечника 4. Ток возбуждения Ie, проходящий в обмотке 3 возбуждения, измеряют при помощи измерительного модуля 5. Пиковый детектор 6, связанный с измерительным модулем 5, выдает два параметра: уровень насыщения и разность пиковых значений тока возбуждения Ie. Уровень насыщения позволяет автоматически регулировать амплитуду напряжения возбуждения Ve. Разность пиковых значений тока возбуждения Ie позволяет оценивать измеряемый ток Im и автоматически регулировать, через преобразователь 7 напряжения в ток, амплитуду тока размагничивания, который проходит в размагничивающей обмотке 8 и который позволяет компенсировать магнитный поток, производимый в магнитном сердечнике 4 измеряемым током Im.
В некоторых случаях применения отдается предпочтение индуктивным датчикам тока. В частности, это относится к измерению тока, проходящего в устройстве отключения типа SSPC (от “Solid State Power Controller”), предназначенном для приборов пользователя, или для измерения тока, проходящего в устройстве преобразования энергии типа РЕМ (“Power Electronic Module”), связанном с фазой двигателя.
Классические индуктивные датчики тока имеют определенные недостатки. В частности, обнаружение пика является относительно чувствительным к внешним электромагнитным помехам, которые могут привести к снижению точности измерения тока. Кроме того, обнаружение пика не дает точной информации, обеспечивающей автоматическое регулирование на вызванном насыщением изгибе характеристики магнитного сердечника. Это создает большие проблемы, когда внешние электромагнитные помехи являются сильными, например, в окружающей среде импульсного преобразователя мощности. Это же относится к случаю, когда на классический индуктивный датчик тока 1 действует сложная тепловая среда, вызывающая отклонение собственных характеристик магнитного сердечника.
Разумеется, эта проблема точности становится еще более серьезной при увеличении диапазона частоты измеряемого тока Im (когда измеряемый ток является переменным током) или при увеличении температурного диапазона работы индуктивного датчика тока.
Задача изобретения
Задачей изобретения является повышение точности индуктивного датчика тока.
Раскрытие изобретения
Для достижения этого технического результата предложен индуктивный датчик тока, содержащий магнитный сердечник, расположенный вокруг проводника, по которому проходит измеряемый ток, обмотку возбуждения, модуль возбуждения, связанный с обмоткой возбуждения и предназначенный для генерирования напряжения возбуждения на клеммах обмотки возбуждения, измерительную обмотку, в которой проходит индуцируемый ток измерения, синхронный демодулятор измерения, связанный с измерительной обмоткой и предназначенный для умножения индуцируемого тока измерения на сигнал демодуляции с частотой 2.f0, чтобы получить напряжение, характеризующее измеряемый ток. Напряжение возбуждения получают на основании первого напряжения с частотой f0 и второго напряжения с частотой 3.f0. Кроме того, индуктивный датчик тока содержит обмотку автоматического регулирования, в которой проходит индуцируемый ток автоматического регулирования, и синхронный демодулятор автоматического регулирования, связанный с обмоткой автоматического регулирования и предназначенный для умножения индуцируемого тока автоматического регулирования на сигнал демодуляции с частотой 3.f0. Синхронный демодулятор автоматического регулирования связан с модулем возбуждения для автоматического регулирования напряжения возбуждения таким образом, чтобы уничтожить частотную составляющую 3.f0 индуцируемого тока автоматического регулирования.
Заявленный индуктивный датчик тока позволяет точно регулировать напряжение возбуждения таким образом, чтобы индуктивный датчик тока работал на своей оптимальной рабочей точке, соответствующей изгибу 9 на характеристике, показанной на фиг. 1. Оптимальная рабочая точка соответствует максимальному коэффициенту усиления индуктивного датчика тока. Таким образом, индуктивный датчик тока оказывается менее чувствительным к внешним электромагнитным помехам и, следовательно, является более точным.
Изобретение будет более понятно из нижеследующего описания не ограничительного варианта частного выполнения изобретения.
Краткое описание чертежей
Это описание представлено со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - кривая функциональной зависимости между магнитным полем и магнитной индукцией.
Фиг. 2 - известный индуктивный датчик тока.
Фиг. 3 - кривая напряжения возбуждения и кривая тока возбуждения, которые возбуждают магнитный сердечник известного индуктивного датчика тока.
Фиг. 4 - заявленный индуктивный датчик тока.
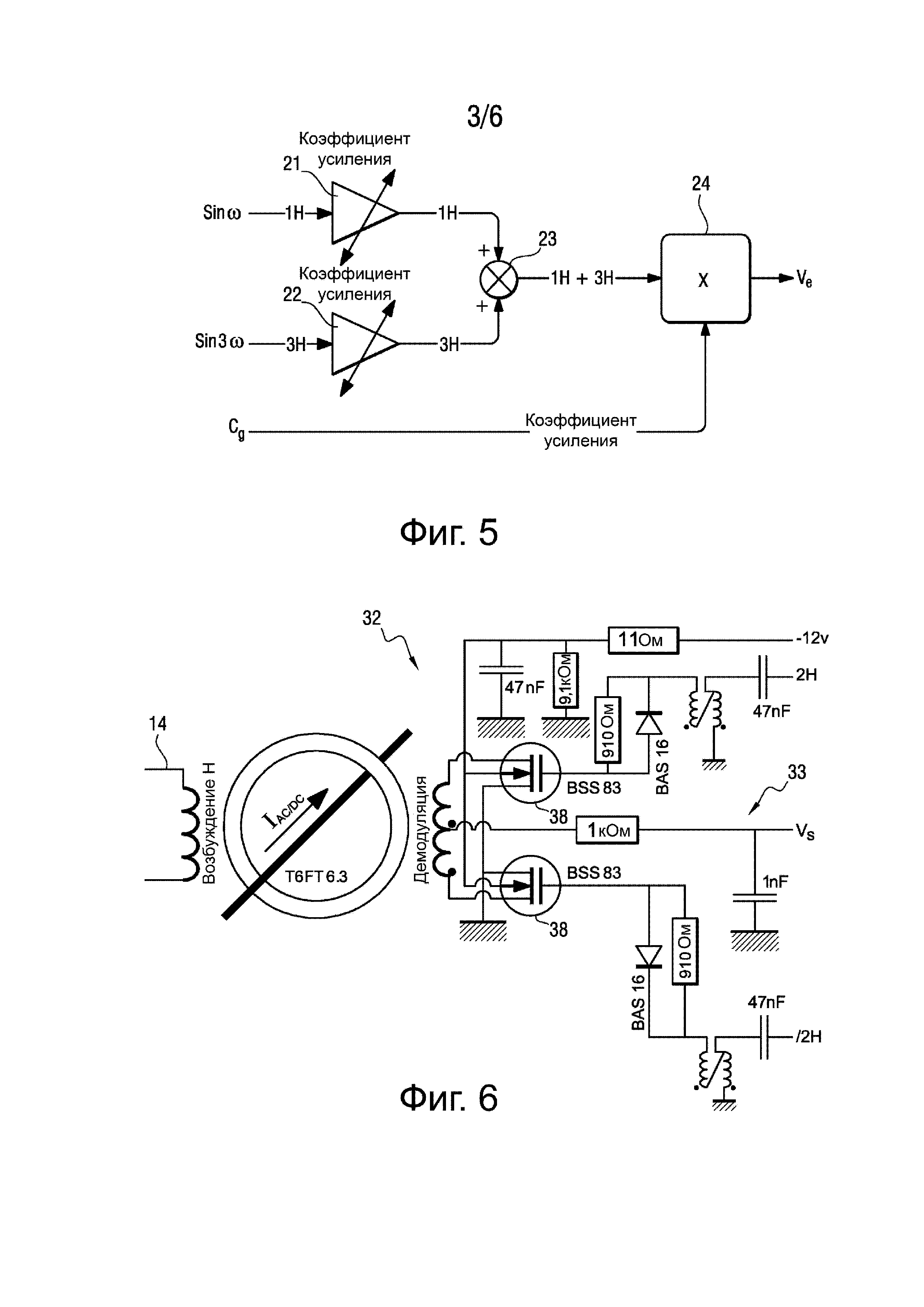
Фиг. 5 - модуль возбуждения заявленного индуктивного датчика тока.
Фиг. 6 - пример синхронного демодулятора измерения заявленного индуктивного датчика тока.
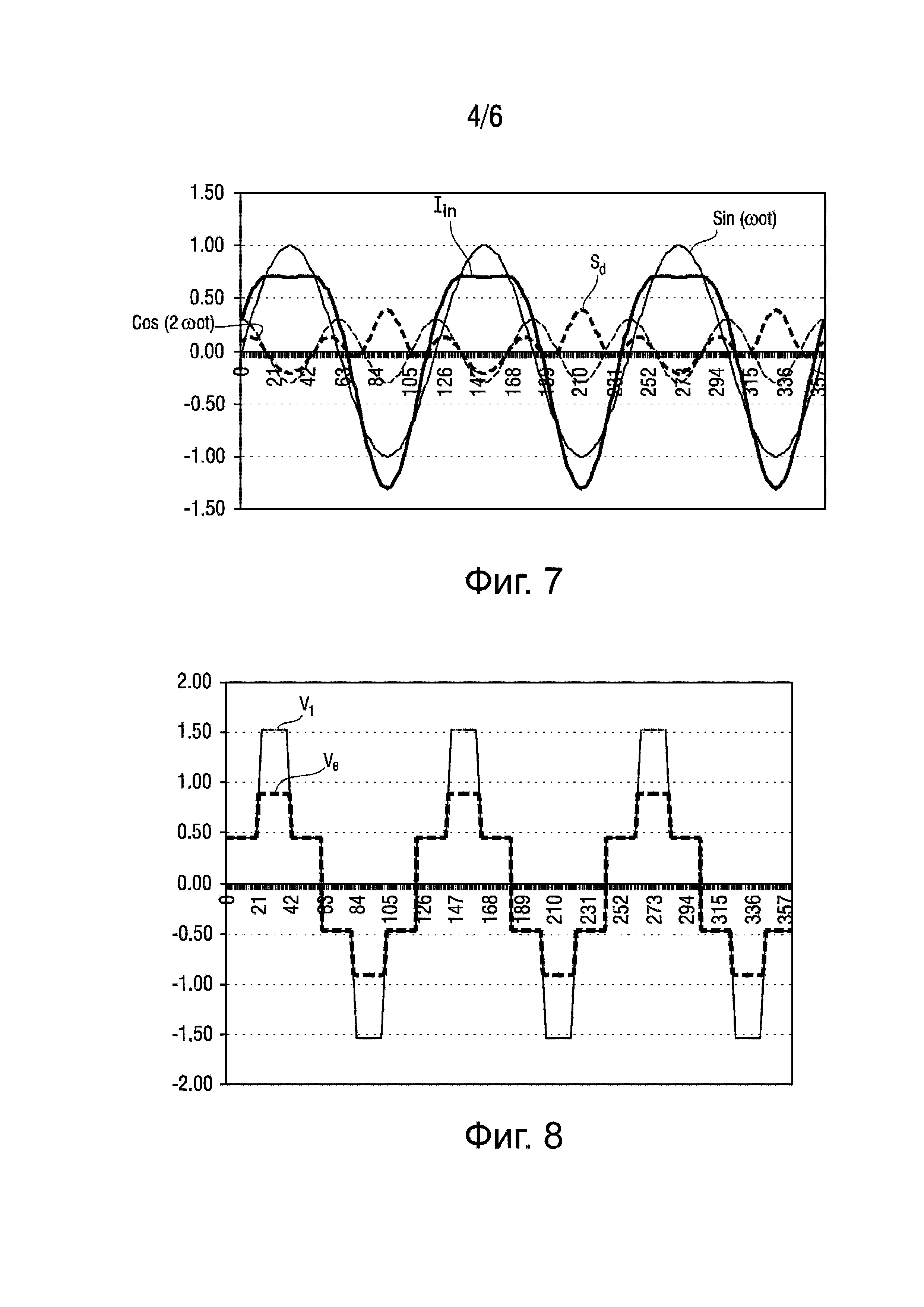
Фиг. 7 - кривые напряжения, полученные при помощи заявленного индуктивного датчика тока, подвергающегося действию поля, излучаемого проводником, через который проходит постоянный ток.
Фиг. 8 - напряжение возбуждения, используемое в заявленном индуктивном датчике тока.
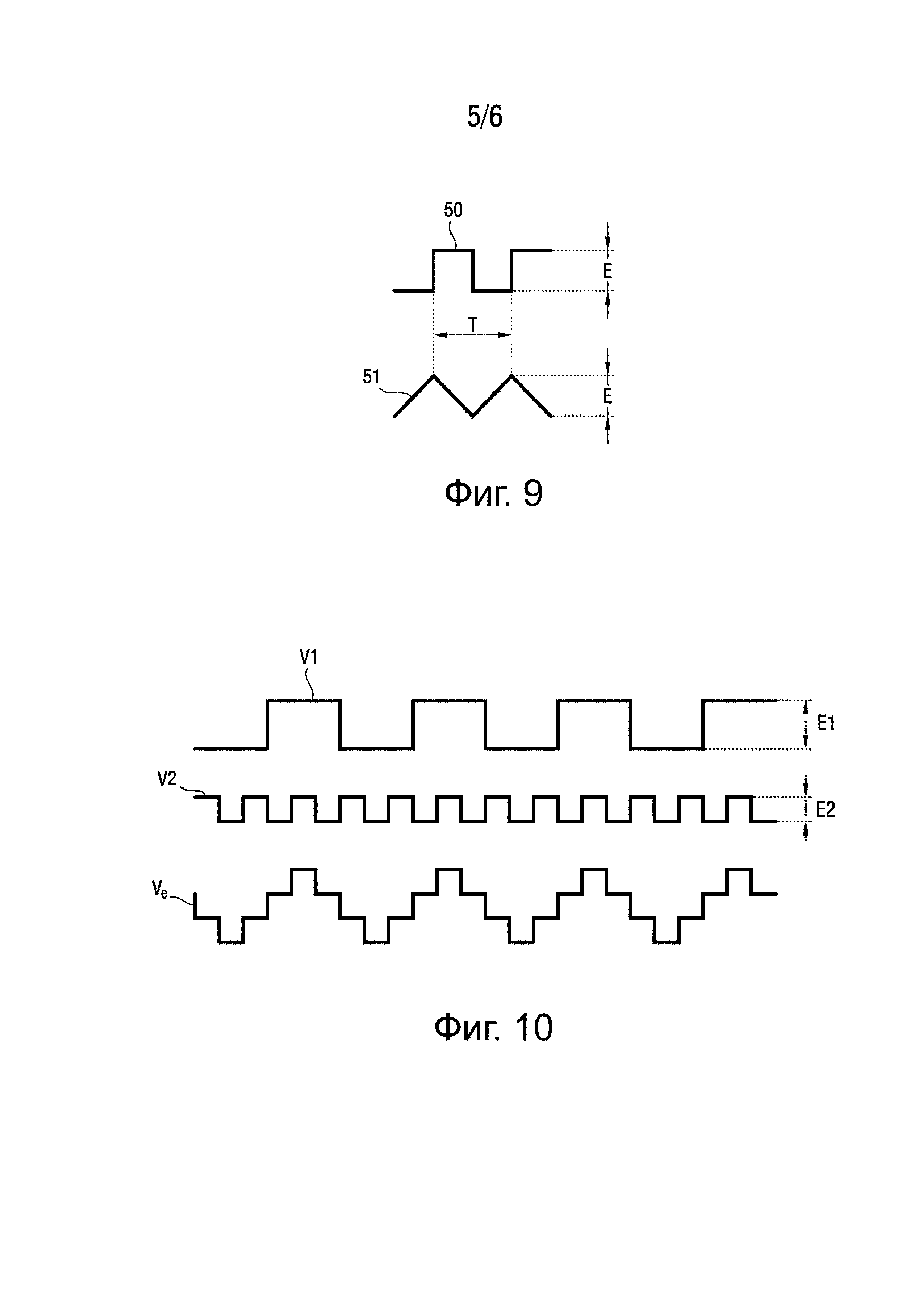
Фиг. 9 - сигнал прямоугольной формы и сигнал треугольной формы.
Фиг. 10 - сигнал прямоугольной формы, сигнал прямоугольной формы тройной частоты и сумма этих сигналов.
Фиг. 11 - частный пример схемы для определения величины сигнала возбуждения.
Фиг. 12 - кривая напряжения на выходе синхронного демодулятора автоматического регулирования заявленного индуктивного датчика тока в зависимости от напряжения возбуждения.
Подробное описание изобретения
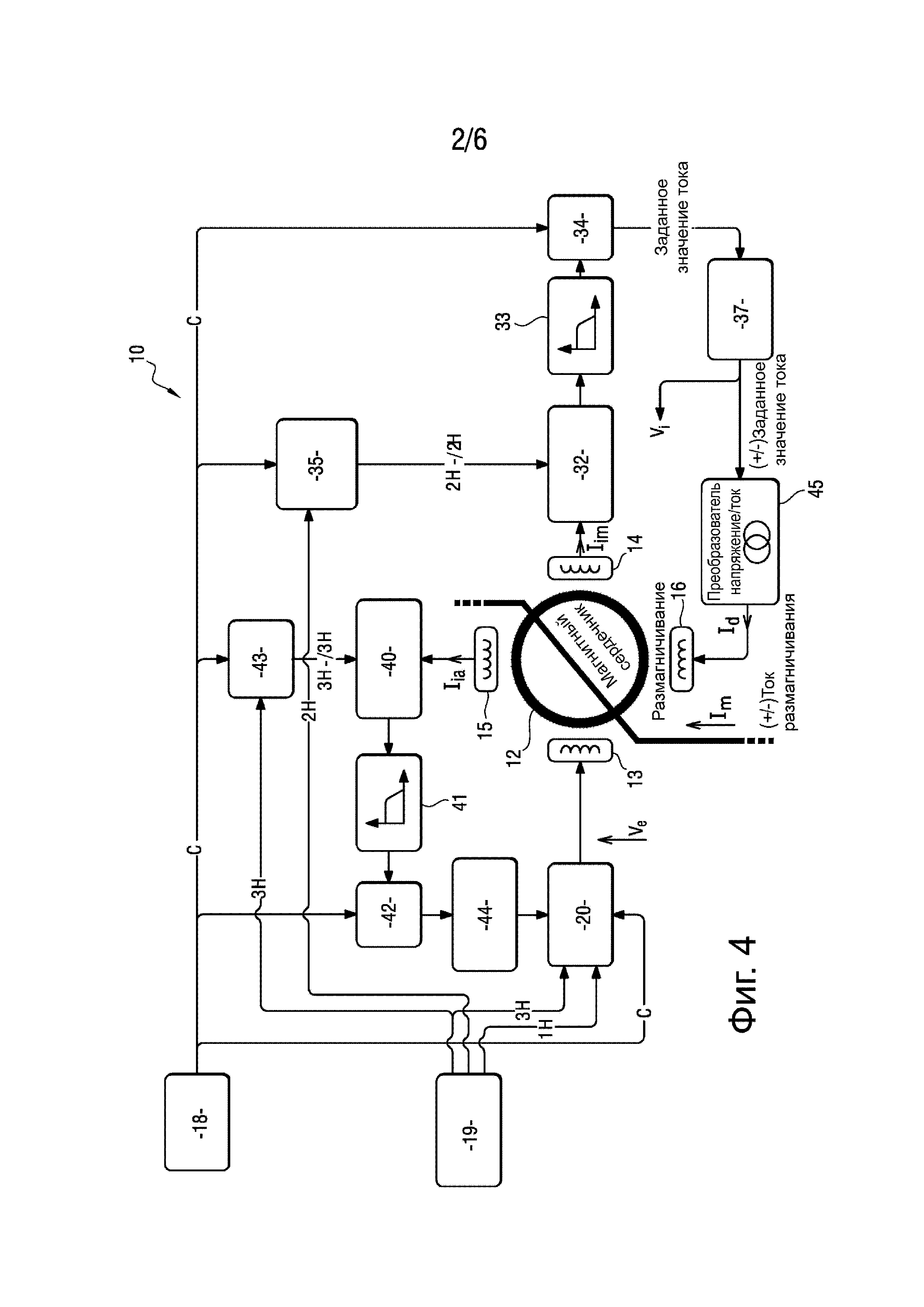
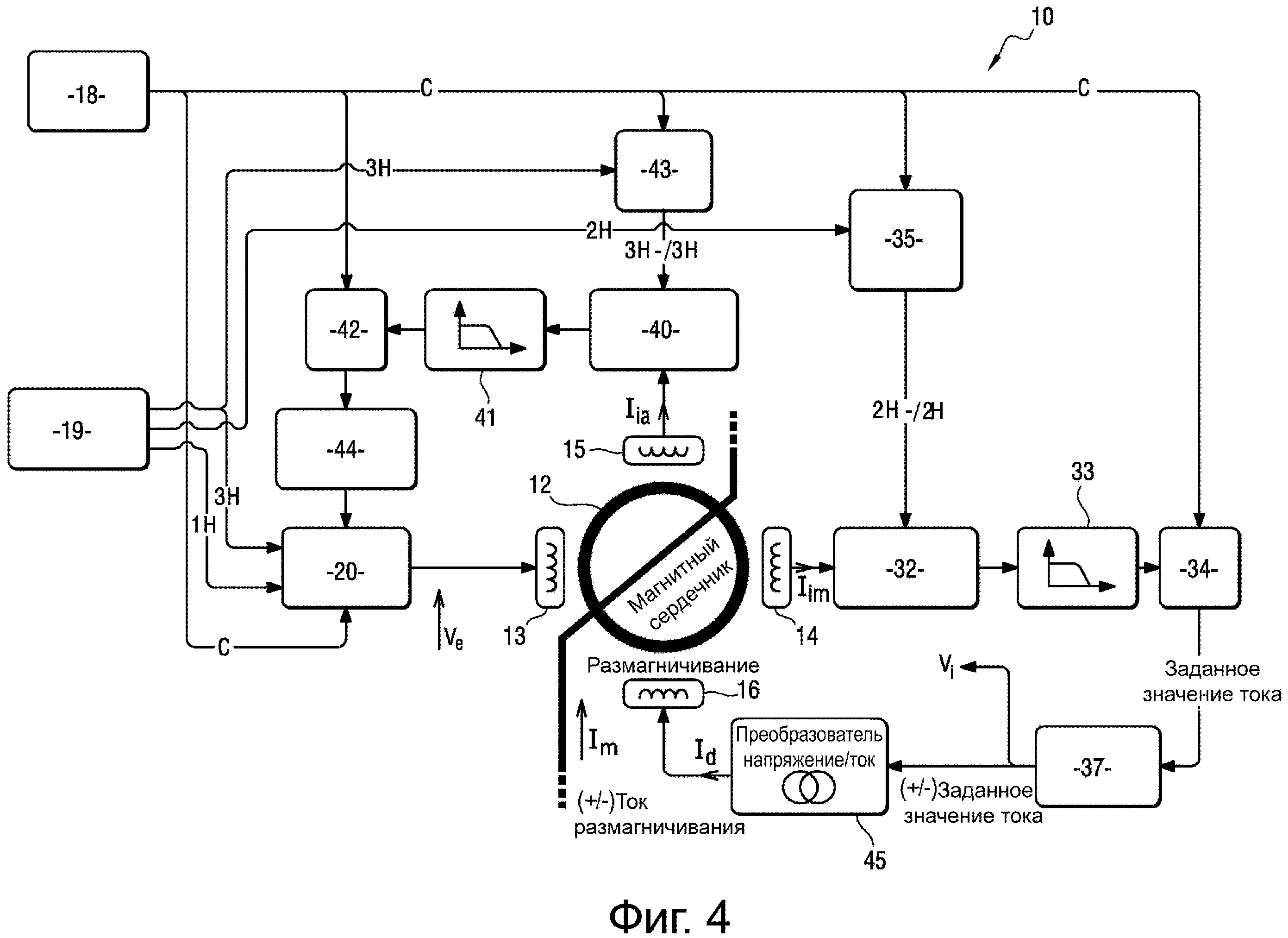
Показанный на фиг. 4 заявленный индуктивный датчик 10 тока используют для измерения тока Im, который проходит через проводник 11.
Индуктивный датчик 10 тока содержит трансформатор, включающий в себя магнитный сердечник 12, а также четыре обмотки, намотанные вокруг магнитного сердечника 12. Магнитный сердечник 12 расположен вокруг проводника 11.
Четыре обмотки включают в себя обмотку 13 возбуждения, измерительную обмотку 14, обмотку 15 автоматического регулирования и обмотку 16 размагничивания. В данном случае измерительная обмотка 14 и обмотка 15 автоматического регулирования выполнены, каждая, путем двойной намотки.
Обмотку 13 возбуждения используют для возбуждения магнитного сердечника 12.
Кроме того, индуктивный датчик 10 тока содержит генератор 18 низкой частоты, генератор 19 высокой частоты и модуль 20 возбуждения, соединенный с обмоткой 13 возбуждения.
Генератор 18 низкой частоты передает сигнал С на два демодулятора 42, 43, 34 и 35. Генератор 19 высокой частоты передает на модуль 20 возбуждения сигнал 1Н с частотой f0 (по sin(ω0t), где ω0=2πf0), а также сигнал 3Н с частотой 3.f0 (по sin(3ω0t), где ω0=2πf0).
Как показано на фиг. 5, модуль 20 возбуждения содержит несколько функциональных блоков, среди которых первый блок-усилитель 21 с переменным коэффициентом усиления, второй блок-усилитель 22 с переменным коэффициентом усиления, блок-сумматор 23, блок 24 коэффициента усиления.
Первый блок-усилитель 21 принимает сигнал 1Н с частотой f0, второй блок-усилитель 22 принимает сигнал 3Н с частотой 3.f0, блок 24 коэффициента усиления принимает заданное значение коэффициента усиления Cg. Блок-сумматор 23 суммирует выходные данные первого блока-усилителя 21 и второго блока-усилителя 22.
Таким образом, модуль 20 возбуждения позволяет генерировать напряжение возбуждения Ve на основании первого напряжения V1 с частотой f0 и на основании второго напряжения V2 с частотой 3.f0.
Измерительную обмотку 14 используют для измерения тока Im. Индуктивный датчик 10 тока содержит синхронный демодулятор 32 измерения, первый фильтр 33 нижних частот и первый унитарный блок 34 коэффициента усиления, которые последовательно соединены с измерительной обмоткой 14. Первый унитарный блок 34 коэффициента усиления выдает коэффициент усиления, селективно равный 1 или -1. Первый унитарный блок 34 коэффициента усиления принимает сигнал С переключения от генератора 18 низкой частоты. Синхронный демодулятор 32 измерения соединен с первым блоком 35 выбора. Первый блок 35 выбора принимает от генератора 18 низкой частоты сигнал С переключения и от генератора 19 высокой частоты сигнал 2Н с частотой 2.f0. Первый блок 35 выбора выдает сигнал демодуляции с частотой 2.f0, обозначаемый соответственно 2Н- или 2Н в зависимости от того, является ли он синфазным или противоположным по фазе с сигналом 2Н на частоте 2.f0. Сигнал 2Н-/2Н демодуляции является сигналом по cos(2ω0t), где ω0=2πf0. Синхронный демодулятор 32 измерения умножает на сигнал 2Н-/2Н демодуляции индуцируемый ток Iim измерения, проходящий в измерительной обмотке 14 и индуцируемый измеряемым током Im. Первый пропорционально-интегральный корректор 37, связанный с первым унитарным блоком 34 коэффициента усиления, создает напряжение Vi, отображающее измеряемый ток Im.
Как показано на фиг. 6, синхронный демодулятор 32 измерения содержит аналоговый переключатель, в котором используют быстрые ключи 38 типа MOS. Первый фильтр 33 нижних частот является пассивным фильтром. Последовательность срабатывания аналогового переключателя задает сигнал 2Н-/2Н демодуляции синфазно или с фазоинверсией. Напряжение Vs на выходе первого фильтра 33 нижних частот является напряжением, характеризующим гармоническую составляющую второго порядка напряжения возбуждения Ve.
Как показано на фиг. 7, насыщение магнитного сердечника 12 приводит к асимметрии индуцируемого тока измерения Iim, при этом указанный индуцируемый ток измерения Iim представляет собой сумму частотной составляющей f0 по sin(ω0t), соответствующей основной частоте, и частотной составляющей 2.f0 по cos(2ω0t), соответствующей гармонической составляющей второго порядка. Средняя составляющая демодулированного сигнала Sd не равна нулю и является положительной. В состоянии, противоположном насыщению, демодулированный сигнал Sd становится отрицательным.
Обмотку 15 автоматического регулирования, в которой проходит индуцируемый ток автоматического регулирования Iia, используют, чтобы контролировать напряжение возбуждения Ve. Индуктивный датчик 10 тока содержит синхронный демодулятор 40 автоматического регулирования, второй фильтр 41 нижних частот и второй унитарный блок 42 коэффициента усиления, которые соединены последовательно с обмоткой 15 автоматического регулирования. Второй унитарный блок 42 коэффициента усиления выдает коэффициент усиления, селективно равный 1 или -1. Второй унитарный блок 42 коэффициента усиления принимает постоянный сигнал С от генератора 18 низкой частоты. Синхронный демодулятор 40 автоматического регулирования соединен с вторым блоком 43 выбора. Второй блок 43 выбора принимает от генератора 18 низкой частоты сигнал С переключения и от генератора высокой частоты сигнал 3Н с частотой 3.f0. Второй блок 43 выбора выдает сигнал демодуляции 3Н-/3Н синфазно или с фазоинверсией. Сигнал демодуляции 3Н-/3Н является сигналом по sin(3ω0t), где ω0=2πf0. Синхронный демодулятор 40 автоматического регулирования умножает индуцируемый ток автоматического регулирования Iia на сигнал демодуляции 3Н-/3Н. Между вторым унитарным блоком 42 коэффициента усиления и модулем 20 возбуждения подключен второй пропорционально-интегральный корректор 44. Это позволяет автоматически регулировать напряжение возбуждения Ve таким образом, чтобы уничтожить частотную составляющую 3.f0 индуцируемого тока автоматического регулирования Iia.
Синхронный демодулятор 40 автоматического регулирования подобен синхронному демодулятору 32 измерения, показанному на фиг. 6, если не считать того, что последовательность работы аналогового переключателя задает сигнал демодуляции 3Н-/3Н синфазно или с фазоинверсией.
Что касается размагничивающей обмотки 16, то она соединена с выходом первого пропорционально-интегрального корректора 37 через преобразователь 45 напряжения в ток. Ток Id размагничивания проходит в размагничивающей обмотке 16, размагничивая магнитный сердечник 12.
Напряжение Vi, характеризующее измеряемый ток Im, на выходе первого пропорционально-интегрального корректора 37 подают на вход преобразователя 45 напряжения в ток. Преобразователь 45 напряжения в ток создает ток размагничивания Id на основании напряжения Vi, характеризующего измеряемый ток Im. Ток на выходе первого унитарного блока 34 коэффициента усиления образует заданное значение тока, применяемое на входе первого пропорционально-интегрального корректора 37. Это позволяет автоматически регулировать ток размагничивания Id на основании напряжения Vi, характеризующего измеряемый ток Im, таким образом, чтобы компенсировать магнитный поток, производимый измеряемым током Im.
Далее следует более подробное описание характеристик напряжения возбуждения Ve.
Как показано на фиг. 8, амплитуду первого напряжения V1 и амплитуду второго напряжения V2 регулируют таким образом, чтобы получить напряжение возбуждения Ve, частотная составляющая 3.f0 (или гармоническая составляющая третьего порядка) которого является синфазной с частотной составляющей f0 (или основной частотой).
Гармоническая составляющая третьего порядка индуцируемого тока автоматического регулирования Iia, проходящего в обмотке 15 автоматического регулирования, полученная после синхронной демодуляции в синхронном демодуляторе 40 автоматического регулирования, является положительной. В случае насыщения магнитного сердечника 12 гармоническая составляющая третьего порядка ослабляется сильнее, чем основная частота, и гармоническая составляющая третьего порядка после синхронной демодуляции становится отрицательной, так как гармоника третьего порядка переходит в противоположную фазу относительно основной частоты.
Таким образом, если напряжение возбуждения Ve является таким, что магнитный сердечник 12 приближается к насыщению, соотношение амплитуды гармонической составляющей первого порядка и амплитуды гармонической составляющей третьего порядка индуцируемого тока автоматического регулирования Iia изменяется вплоть до уничтожения гармонической составляющей третьего порядка, затем до инверсии фазы гармонической составляющей третьего порядка. Таким образом, рабочая точка, соответствующая уничтожению гармонической составляющей третьего порядка индуцируемого тока автоматического регулирования Iia, является оптимальной рабочей точкой индуктивного датчика 10 тока. Эта оптимальная рабочая точка соответствует изгибу 9 кривой характеристики, показанной на фиг. 1.
Таким образом, автоматическое регулирование напряжения возбуждения Ve состоит в управлении напряжением возбуждения Ve, прежде чем оно не будет подано на клеммы обмотки 13 возбуждения, чтобы уничтожить гармоническую составляющую третьего порядка индуцируемого тока автоматического регулирования Iia. Индуктивный датчик 10 тока работает, таким образом, постоянно на оптимальной рабочей точке. Это позволяет получить максимальный коэффициент усиления в ситуации асимметрии, вызываемой измеряемым током Im и обнаруживаемой на индуцируемом токе измерения Iim. Следует отметить, что это автоматическое регулирование при помощи синхронной демодуляции гармонической составляющей третьего порядка является мало чувствительным к внешним электромагнитным помехам, так как все сигналы частотой, отличной от частоты 3.f0, создают паразитные сигналы интермодуляции, составляющие которых отфильтровывает первый фильтр 33 нижних частот, подключенный на выходе синхронного демодулятора 32 измерения. Кроме того, следует отметить, что это автоматическое регулирование не обязательно должно быть очень быстрым, так как изменения, вызываемые внешними факторами (температура, старение), происходят относительно медленно.
Как показано на фиг. 7, первое напряжение V1 и второе напряжение V2 являются в данном случае напряжениями прямоугольной формы. Действительно, напряжения прямоугольной формы можно проще генерировать, и они имеют сильные нечетные гармонические составляющие.
Преимущество использования такого напряжения возбуждения Ve, состоящего из первого напряжения V1 и второго напряжения V2, вытекает из нижеследующего.
Спектральное разложение показанного на фиг. 9 сигнала прямоугольной формы 50 с амплитудой Е и с периодом Т можно выразить следующим образом:
X(t)=4.E/π.[sin(ωt)+1/3.sin(3ωt)+1/5.sin(5ωt)+...], где ω=2π/Т.
Спектральное разложение сигнала треугольной формы 51 с амплитудой Е и с периодом Т выражается следующим образом:
X(t)=8.E/π2.[sin(ωt)-1/32.sin(3ωt)+1/52.sin(5ωt)-...], где ω=2π/Т.
Таким образом, сигнал 51 треугольной формы содержит отрицательную гармоническую составляющую третьего порядка.
Как показано на фиг. 10, если амплитуды первого напряжения V1 и второго напряжения V2 отрегулированы правильно, сложение первого напряжения V1 прямоугольной формы и второго напряжения V2 прямоугольной формы позволяет получить напряжение возбуждения Ve общей треугольной формы, гармоническая составляющая третьего порядка которого является отрицательной.
Явление насыщения магнитного сердечника 12 приближает форму волны индуцируемого тока автоматического регулирования Iia к форме волны сигнала прямоугольной формы. Таким образом, при приближении к насыщению амплитуда гармонической составляющей третьего порядка индуцируемого тока автоматического регулирования Iia будет стремиться к нулю, затем станет отрицательной в соответствии с разложением сигнала прямоугольной формы. Это позволяет определить команду напряжения возбуждения Ve посредством автоматического регулирования по точке уничтожения гармонической составляющей третьего порядка индуцируемого тока автоматического регулирования Iia.
Эту специальную точку регулирования можно найти посредством вычисления.
Первое напряжение V1 имеет следующее спектральное разложение в синусоидальных функциях:
X1(t)=4.E1/π.[sin(ω0t)+1/3.sin(3ω0t)+1/5.sin(5ω0t)+...].
Второе напряжение V2 имеет следующее спектральное разложение в синусоидальных функциях:
X2(t)=4.E2/π.[sin(3ω0t)+1/3.sin(9ω0t)+1/5.sin(15ω0t)+...].
Гармоническая составляющая третьего порядка суммы между, с одной стороны, спектральным разложением первого напряжения V1 и, с другой стороны, вторым спектральным разложением второго напряжения V2 равна:
4/π.(E1/3.sin(3ω0t)+E2.sin(3ω0t).
Таким образом, гармоническая составляющая третьего порядка является нулевой при Е1=-3.Е2.
Автоматическое регулирование напряжения возбуждения Ve состоит в регулировании амплитуды второго напряжения V2. Таким образом, используют амплитуду второго напряжения V2, чтобы контролировать амплитуду напряжения возбуждения Ve с целью уничтожения гармонической составляющей третьего порядка индуцируемого тока автоматического регулирования Iia.
Следовательно, перед насыщением магнитного сердечника 12 команда искомого напряжения возбуждения Ve должна иметь уровень относительного насыщения гармонической составляющей третьего порядка, дающий слабо отрицательную результирующую после демодуляции при помощи синхронного демодулятора 40 автоматического регулирования, чтобы иметь возможность пройти через 0 и затем стать отрицательной. Именно эту специальную точку необходимо регулировать, чтобы найти наилучший компромисс коэффициента усиления функции перехода, который соответствует оптимальной рабочей точке и изгибу 9 на характеристике, показанной на фиг. 1.
Следует отметить, что сигнал 2Н с частотой 2.f0 и сигнал 3Н с частотой 3.f0 периодически меняют фазу на противоположную, в данном случае на частоте 10 кГц. Сдвиги с фазоинверсией усредняются первым пропорционально-интегральным корректором 37 и вторым пропорционально-интегральным корректором 44 и, следовательно, уничтожаются. Эта функция инверсии фазы на 10 кГц позволяет компенсировать разбалансировку каналов измерения и автоматического регулирования, которая является результатом несовершенства используемых аналоговых компонентов. Это позволяет повысить точность регулирования индуктивного датчика 10 тока по оптимальной рабочей точке и, следовательно, повысить общую точность самого индуктивного датчика 10 тока.
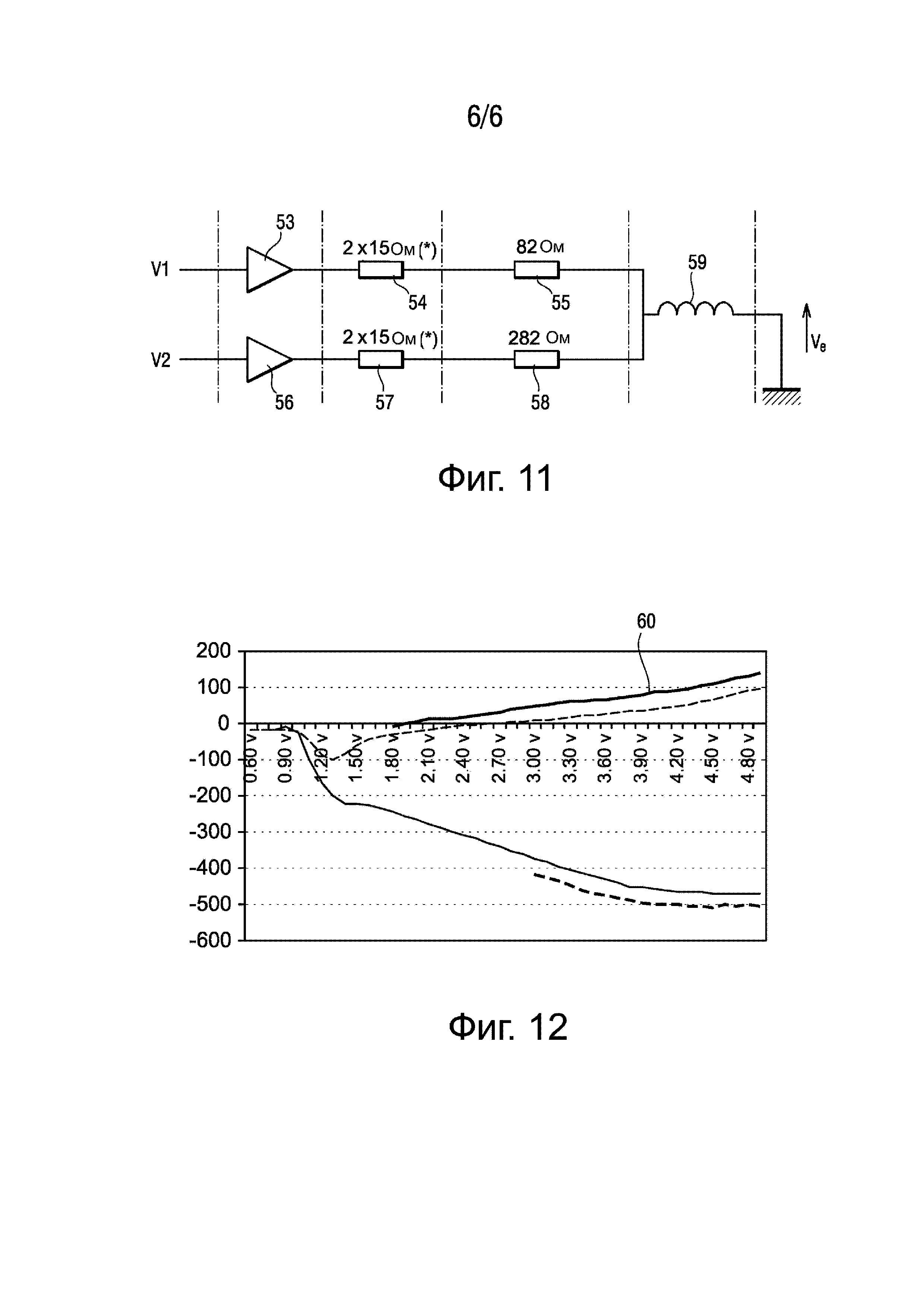
Как показано на фиг. 11, для регулирования напряжения возбуждения Ve используют первый усилитель 53, установленный в буферном положении, два первых выходных резистора 54 каждый на 15 Ом, первый регулировочный резистор 55, второй усилитель 56 в буферном положении, два вторых выходных резистора 57 каждый на 15 Ом и второй регулировочный резистор 58. Таким образом, к нагрузке 59 прикладывают напряжение возбуждения, при котором Е1=2,78.Е2. Значение 2.78 меньше 3, следовательно, уровень гармонической составляющей третьего порядка напряжения возбуждения Ve выше, чем уровень сигнала прямоугольной формы, что соответствует отрицательному демодулированному сигналу.
Как показано на фиг. 12, гармоническая составляющая напряжения 60 на выходе синхронного демодулятора 40 автоматического регулирования уничтожается при напряжении возбуждения, близком к 3 В, и становится положительной сверх этого значения. Таким образом, прохождение через ноль соответствует оптимальной рабочей точке индуктивного датчика 10 тока. При регулировании индуцируемого тока автоматического регулирования Iia по этой точке прохождения через ноль функция перехода заявленного индуктивного датчика 10 тока остается в изгибе 9, показанном на фиг. 1.
Индуктивный датчик 10 тока имеет ряд преимуществ перед существующими индуктивными датчиками тока.
Улучшение регулирования рабочей точки за счет демодуляции при помощи синхронного демодулятора 40 автоматического регулирования позволяет добиться лучшего иммунитета к шумам.
Кроме того, использование синхронных демодуляторов позволяет получать работу на высокой частоте, что обеспечивает большую полосу пропускания измеряемого тока Im при сохранении очень хорошей сопротивляемости к внешним электромагнитным помехам.
Поскольку измерение всегда происходит в оптимальной рабочей точке, соответствующей вызванному насыщением изгибу 9, чувствительность индуктивного датчика 10 тока является постоянной в температурном диапазоне. Следовательно, точность индуктивного датчика 10 тока является высокой в широком температурном диапазоне.
Индуктивный датчик 10 тока является нечувствительным к отклонениям некоторых характеристик магнитного сердечника 12, связанным с его изготовлением. В частности, характеристики магнитной проницаемости классических магнитных сердечников, не предусмотренных для использования в зоне насыщения, являются очень разнородными. Точное автоматическое регулирование рабочей точки позволяет скорректировать эти разбросы. Следовательно, можно использовать стандартные магнитные сердечники, что позволяет снизить производственные требования при изготовлении магнитного сердечника и, следовательно, стоимость индуктивного датчика 10 тока. Это позволяет использовать ферритовый магнитный сердечник, классически применяемый в преобразователях питания и для некоторых функций в области радиотехники.
Кроме того, индуктивный датчик 10 тока имеет архитектуру, которую можно транспонировать на цифровые решения, чтобы улучшить воспроизводимость и, следовательно, изготовление индуктивного датчика 10 тока. Так, напряжение возбуждения Ve можно получать при помощи быстрого аналогово-цифрового преобразователя. Точно так же, синхронные демодуляторы 32 измерения и 40 автоматического регулирования можно применять на цифровом компоненте (например, на FPGA). Размагничивание можно тоже осуществлять при помощи аналогово-цифрового преобразователя.
Следует отметить, что можно использовать не один, а два магнитных сердечника. В этом случае второй магнитный сердечник будет получать такое же возбуждение, что и измерительная схема, но с противоположной фазой, чтобы уничтожать поток непосредственно на уровне проводника, по которому проходит измеряемый ток.
Разумеется, изобретение не ограничивается описанным вариантом выполнения и охватывают любую версию, входящую в объем изобретения, определенный в формуле изобретения.
Электромеханический привод подвижной поверхности управления полетом
Устройство определения местоположения цели посредством коррекции по звезде, предназначенное для установки на подвижном носителе
Привод с пассивной блокировкой
Привод, оснащенный системой no back с зоной блокировки
Рукоятка для удержания оружия и оружие, содержащее такую рукоятку
Способ мониторинга устройства типа электромеханического привода
Телескоп с упрощенным монтажом
Телескоп с улучшенными характеристиками и с упрощенным монтажом
Телескоп с упрощенным монтажом и способ регулирования такого телескопа

