Результат интеллектуальной деятельности: Система управления огнем боевой машины и блок управления автоматикой
Вид РИД
Изобретение
Изобретение относится к области вооружения и военной техники, в частности к системам управления огнем (СУО) боевых машин (БМ) типа танков, БМП, БТР, БМД и т.п.
В качестве аналога может быть рассмотрена система управления огнем БМ (см. описание патента РФ на изобретение №2360208, МПК 7 F41H 7/02, F41A 27/30, опубл. 27.06.2009 по заявке №2007124064 от 26.06.2007 г., патентообладатель АО «КБП», г. Тула), включающая прицел наводчика, прицел командира, стабилизатор вооружения, телетепловизионный автомат сопровождения объектов (АСОТТ), блок управления, пульт оператора-наводчика и пульт командира, баллистический вычислитель с системой датчиков входной информации, блок автоматики.
Общими признаками аналога и заявляемого технического решения являются прицел наводчика, прицел командира, стабилизатор вооружения (в заявляемом техническом решении - это блок управления системы наведения вооружения), пульт оператора-наводчика и пульт командира, баллистический вычислитель с системой датчиков входной информации, блок автоматики (в заявляемом техническом решении - два последних входят в блок управления автоматикой).
Причиной, препятствующей достижению заявляемого технического решения является то, что данная система не позволяет обеспечивать одновременную обработку видеоинформации в различных спектральных диапазонах, ранжирование целей по степени опасности и определение их координат, одновременное автоматическое сопровождение нескольких целей в поле зрения прицела, что существенно снижает обнаружительные возможности БМ. Наличие в СУО аналоговых и цифровых подсистем и обусловленная этим необходимость цифро-аналоговых и аналогово-цифровых преобразований приводит к снижению точностных характеристик и быстродействия. Не обеспечивается дистанционное управление вооружением.
В качестве аналога также может быть рассмотрена система управления огнем БМ (см. описание патента РФ на изобретение №2553712, МПК 7 F41G 5/24), опубл. 20.06.2015 по заявке №2014110448 от 18.03.2014 г., патентообладатель ОАО «СКБ ПА», г. Ковров, содержащая пульты управления по ГН и ВН, блок управления стабилизатора, включающий в т.ч. формирователи сигналов последовательной шины, блок вычисления сигналов управления, блок вычисления баллистических поправок, а также усилители мощности, редукторы и электродвигатели ВН пусковых установок и пушки, датчик положения башни, датчики положения по ВН оружия, датчик крена и тангажа, датчики абсолютной угловой скорости пушки по ГН и ВН, задающее устройство независимо стабилизированного в пространстве инерциального объекта стабилизации по ГН и ВН, аппаратура системы управления боевым отделением, последовательные шины данных.
Общими признаками аналога и заявляемого технического решения по п. 1 являются задающее устройство независимо стабилизированного в пространстве инерциального объекта стабилизации (в заявляемом техническом решении - входит в состав прицела наводчика, прицела командира), пульты управления по ГН и ВН, блок управления стабилизатора (в заявляемом техническом решении - блок управления системой наведения вооружения), усилители мощности, редукторы и электродвигатели ВН пусковых пушки, датчик положения башни, датчики положения по ВН оружия, датчик крена и тангажа, датчики абсолютной угловой скорости пушки по ГН и ВН.
Причиной, препятствующей достижению заявляемого технического решения являются недостаточные обнаружительные возможности комплекса вооружения, невозможность рационально выбирать свой тип вооружения и боеприпаса, приспособленный для конкретной цели, а также производить точную стрельбу из-за неучета данных метеобаллистической подготовки ввиду отсутствия соответствующих датчиков.
Наиболее близким аналогом изобретения по п. 1 является система управления огнем боевой машины (см. патент РФ на полезную модель №134624, МПК 7 F41G 5/24, опубл. 20.11.2013 по заявке 2013130584/28 от 02.07.2013, патентообладатели Открытое акционерное общество «Уральское конструкторское бюро транспортного машиностроения» и Открытое акционерное общество «Научно-конструкторское бюро вычислительных систем»), содержащая прицел наводчика многоканальный, прицел командира панорамный, прицел-дублер телевизионный, блок коммутации видеосигналов, блок управления системы управления дистанционной пулеметной установкой, видеосмотровые устройства командира и наводчика и пульты командира и наводчика, датчики, учитывающие положение пушки, положение башни, датчик крена и тангажа, датчик ветра, датчик изгиба ствола пушки, датчик скорости, мультиплексный канал информационного обмена, блок управления автомата заряжания, блок управления стабилизацией вооружения, блок цифровой обработки видеоизображений, пульт загрузки, пульт управления системы управления огнем боевой машины и автомата заряжания, аппаратуру сопряжения и ввода поправок, мультиплексный канал информационного обмена, цифровой канал информационного обмена типа RS 422 и цифровой канал информационного обмена типа CAN.
Общими признаками аналога (прототипа) и заявляемого технического решения являются прицел наводчика и прицел командира, видеосмотровые устройства командира и наводчика (в заявляемом техническом решении - это видеомодули наводчика и командира) и пульты командира и наводчика (в заявляемом техническом решении - пульты наведения наводчика и командира), датчики, учитывающие положение пушки, положение башни, датчик крена и тангажа, датчик ветра (в заявляемом техническом решении входит в состав измерителя состояния атмосферы), датчик скорости БМ, блок управления стабилизацией вооружения (в заявляемом техническом решении - блок управления системы наведения вооружения), блок цифровой обработки видеоизображений (в заявляемом техническом решении - блоки обработки видеоизображений).
Причинами, препятствующими достижению заявляемого технического результата, является следующие: не обеспечивается эффективное поражение всей номенклатуры целей, предназначенных для БМ рассматриваемого типа, возможность использования специального оружия для каждого типа цели, невозможность дистанционного управления основным вооружением, отсутствие управляемого оружия с независимой от основного оружия стабилизацией, недостаточно высокая надежность системы обнаружения и сопровождения целей из-за отсутствия дублирования этих процессов.
Задача, на решение которой направлены заявляемые технические решения, заключается в повышении точности и эффективности стрельбы по расширенной номенклатуре целей, в широком диапазоне условий боевого применения; расширении функциональных возможностей БМ, обеспечении дистанционного управления вооружением (обеспечении необитаемости боевого отделения), повышении поисковых и обнаружительных возможностей БМ.
Кроме того, при использовании заявляемой СУО обеспечивается повышение надежности, снижение количества и трудоемкости выполнения настроечных операций, а также унификация как в смысле использования на различных образцах бронетанковой техники: танков, БМП, БТР, БМД, так и для применения на объектах стационарного и морского базирования.
Технический результат, обеспечиваемый при реализации заявляемого технического решения, достигается за счет того, что:
- используются цифровые датчики углового положения и угловых скоростей с более низкими значениями абсолютной погрешности выходного сигнала;
- осуществляется цифровая обработка видеоизображений, поступающих с каналов технического зрения прицельного комплекса, в режиме реального времени, раздельно по каналам наводчика и командира;
- осуществляется передача сигналов непосредственно в цифровом коде, без дополнительных промежуточных преобразований величин, за счет чего устраняются обусловленные ими дополнительные погрешности;
- реализация различных функций, в т.ч. новых, достигается за счет доработки и корректировки программного обеспечения подсистем СУО, без изменения их аппаратной реализации;
- высокопроизводительные вычислительные средства БОВИ позволяют реализовать автоматическую систему поиска и сопровождения целей, за счет чего значительно (в несколько раз) сокращается время и повышается вероятность выявления целей по сравнению с режимами «ручного» поиска;
- обеспечиваются одновременная обработка видеоинформации в различных спектральных диапазонах, ранжирование целей по степени опасности и определение координат, одновременное автоматическое сопровождение нескольких целей в поле зрения прицела;
- блочно-модульный принцип построения СУО позволяет оперативно видоизменять ее конфигурацию и компоновать СУО различных вариантов исполнения в зависимости от решаемых БМ задач и стоимостных ограничений;
- реализация дистанционного подрыва снарядов в воздухе позволяет увеличить приведенную площадь поражения, особенно живой силы, воздушных целей, в т.ч. наиболее массовых типа беспилотных летательных аппаратов, легкобронированной техники.
Поставленная задача решается тем, что в известную систему управления огнем боевой машины, содержащую прицел наводчика, прицел командира, блок управления системы наведения вооружения (БУ СНВ), блок обработки видеоизображения (БОВИ), видеомодули наводчика (ВМ-Н) и командира (ВМ-К), пульты командира и наводчика, датчики, учитывающие положение башни и пушки, датчик крена и тангажа, датчик ветра и датчик скорости носителя, согласно изобретению дополнительно введены второй БОВИ, устройства ввода наводчика (УВ-Н) и командира (УВ-К), блок управления автоматикой (БУА), блок управления пушкой, блок управления пусковой установкой (ПУ) УР малого калибра, блок управления ПУ УР большего калибра, комплекс дистанционного управления временем подрыва снаряда (КДУ ВПС), блок управления автоматизированным рабочим местом (БУ АРМ), датчик температуры заряда, измеритель состояния атмосферы, блок защиты и коммутации, вращающееся контактное устройство, цифровые каналы информационного обмена CAN (CAN-1 - CAN-5), цифровой и аналоговый видеоканалы, причем первые входы-выходы прицела наводчика (ПН) и прицела командира (ПК) соединены с каналом CAN-2, вторые входы-выходы - с каналом CAN-1, третьи входы - с каналом CAN-3, их четвертые выходы соединены через аналоговые видеоканалы со вторыми входами видеомодулей соответственно наводчика и командира, транслируясь через вращающееся контактное устройство (ВКУ), третьи выходы - соответственно посредством информационного канала типа Ethernet с БОВИ-Н и БОВИ-К, которые первыми своими входами - выходами соединены между собой с помощью цифрового видеоканала, вторые входы БОВИ-Н и БОВИ-К соединены с каналом CAN-2, а вторые выходы - с CAN-3, а их третьи выходы соединены с помощью цифрового видеоканала соответственно с первым и вторым входами блока управления автоматизированного рабочего места (БУ АРМ), транслируясь через ВКУ, первый-второй выходы БУ АРМ соединены соответственно с первыми входами видеомодуля командира и видеомодуля наводчика с помощью цифрового видеоканала, а третьи-пятые входы-выходы БУ АРМ выполнены с возможностью подсоединения к шасси соответствующей БМ; третьи входы-выходы видеомодуля наводчика и командира соединены с каналом CAN-3, а его четвертые входы-выходы - с каналом CAN-2, выходы устройства ввода соединены с каналом CAN-2, а выходы пульта наведения наводчика и пульта наведения командира соединены с каналом CAN-3; причем цифровые каналы CAN-2, CAN-3 соединены с вышеприведенными подсистемами в шасси через ВКУ и через БУ АРМ, первый вход-выход БУ СНВ соединен с цифровым каналом информационного обмена CAN-1 и является внешним входом-выходом СНВ, второй вход-выход БУ СНВ соединен с каналом CAN-2 и также является внешним входом-выходом СНВ, первый вход-выход блока управления автоматикой (БУА) соединен через внутренний канал CAN-4 с первыми входами-выходами блока управления пушкой, блока управления ПУ малого калибра, вторые входы-выходы которых соединены с исполнительными механизмами соответственно пушки и ПУ УР малого калибра, а также соединен с первыми входом-выходом блока управления ПУ большого калибра, вторые и третьи входы-выходы которого соединены соответственно с исполнительными механизмами правой и левой ПУ УР большего калибра; второй вход-выход БУА соединен с CAN-2, третий вход - выход его соединен с каналом CAN-3, четвертый выход - с CAN-1, четвертый его вход - с первым выходом блока защиты и коммутации (БЗК), а пятый вход-выход БУА соединен с пятыми входами-выходами видеомодулей наводчика и командира посредством цифрового канала CAN-5, транслируемого через ВКУ, датчик крена и тангажа, датчик температуры заряда, измеритель состояния атмосферы соединены с БУА через канал CAN-2; КДУ ВПС подключен своим первым входом-выходом к каналу CAN-2, а своим вторым входом-выходом - к CAN-3; блок защиты и коммутации (БЗК) по первому входу запитывается с шасси через ВКУ, своим вторым входом-выходом он подсоединен к цифровому информационному каналу CAN-4.
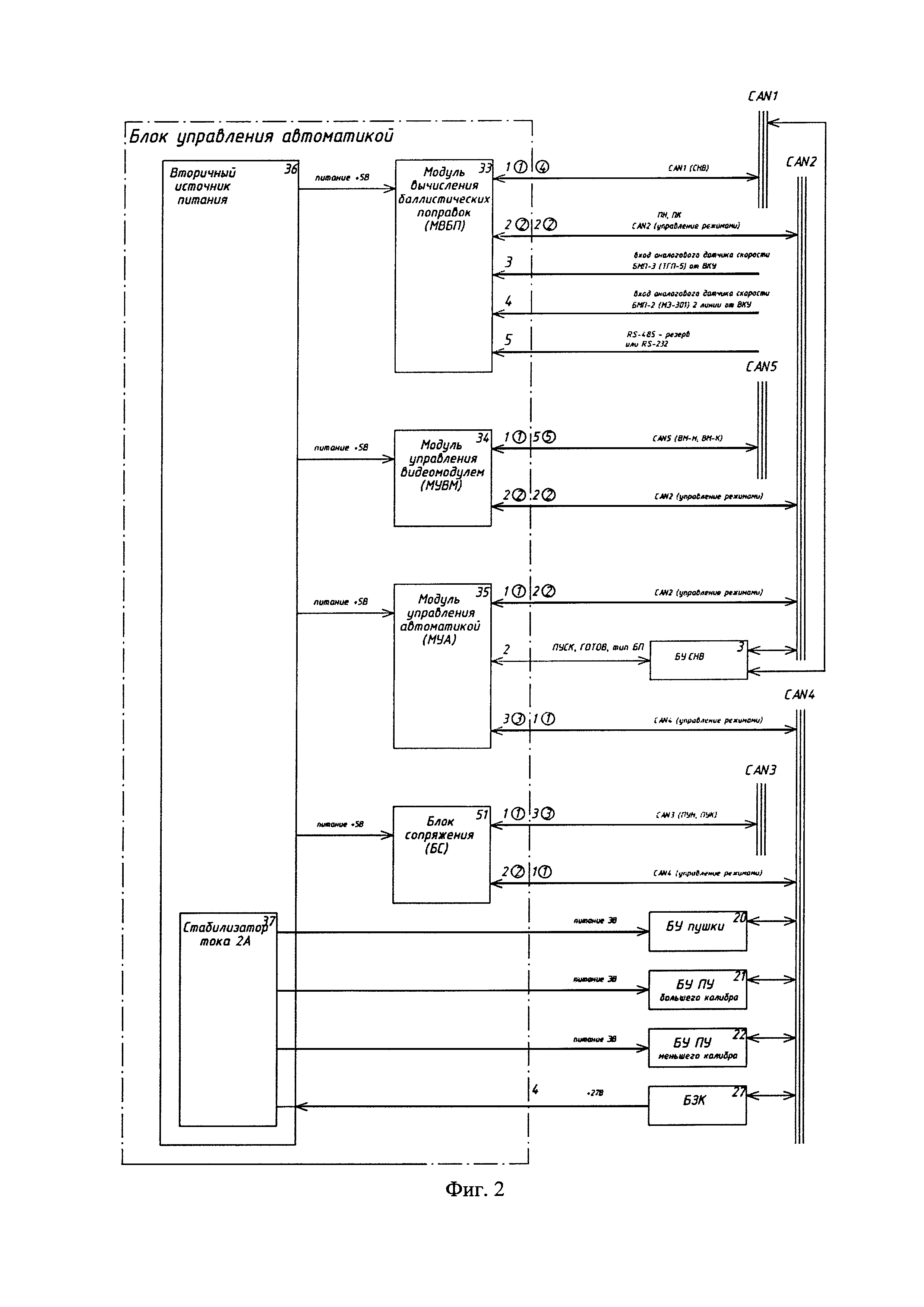
Поставленная задача решается также тем, что блок управления автоматикой (БУА) содержит модуль вычисления баллистических поправок (МВБП), модуль управления видеомодулем (МУВМ), модуль управления автоматикой (МУА), блок сопряжения, вторичный источник питания и стабилизатор тока, причем первые входы-выходы МВБП соединены с CAN-1, второй вход-выход соединен с CAN-2, третий-четвертый входы МВБП выполнены с возможностью подсоединения через ВКУ со входами датчиков скорости в шасси БМ типа БМП-2 и БМП-3, резервный пятый вход МВБП выполнен с возможностью подсоединения к цифровым каналам RS-485 или RS-232, первый вход-выход МУА соединен с CAN-2, второй вход-выход МУА соединен аналоговым релейным каналом непосредственно с БУ СНВ, а его третий вход-выход через цифровой канал связи CAN-4 - с блоком управления пушки, блоком управления ПУ УР малого калибра и блоком управления ПУ УР большого калибра, а также БЗК, первый вход-выход МУВМ соединен с цифровым информационным каналом CAN-5, а его второй вход-выход соединен с цифровым каналом CAN-2; первые вход-выход блока сопряжения соединены с каналом CAN-3, а его второй вход-выход - с каналом CAN-4, вход источника питания соединен с первым выходом блока защиты и коммутации (БЗК), а с выхода вторичного источника питания запитываются МВБП, МУВМ, МУА и блок сопряжения, а также БУ пушки, БУ ПУ малого калибра, БУ ПУ большего калибра.
Именно организованные таким образом система управления огнем и блок управления автоматикой вооружения обеспечивают повышение точности и эффективности стрельбы по расширенной номенклатуре целей, в широком диапазоне условий боевого применения; повышение поисковых и обнаружительных возможностей комплекса вооружения БМ; обеспечение дистанционного управления вооружением (обеспечение необитаемости боевого отделения), расширение функциональных возможностей БМ. Тем самым достигается цель изобретения. Это позволяет сделать вывод о том, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сопоставительный анализ с прототипом показывает, что заявляемая система управления огнем БМ отличается наличием новых элементов, а именно:
- второй БОВИ (командира),
- устройства ввода наводчика (УВ-Н) и командира (УВ-К),
- блок управления автоматикой (БУА),
- блок управления пушкой,
- блок управления ПУ УР малого калибра,
- блок управления ПУ УР большого калибра,
- комплекс дистанционного управления временем подрыва снаряда (КДУ ВПС),
- блок управления автоматизированным рабочим местом (БУ АРМ),
- датчик температуры заряда,
- измеритель состояния атмосферы,
- блок защиты и коммутации,
- информационные каналы CAN (CAN-1 - CAN-5) или точнее информационные магистрали,
- вращающееся контактное устройство,
- цифровой и аналоговый видеоканалы с их связями с другими элементами системы.
Сравнение заявленного решения с другими техническими решениями показывает, что отдельные вновь вводимые элементы достаточно известны в технике, но введение их в указанной связи в СУО позволяет решить поставленные задачи.
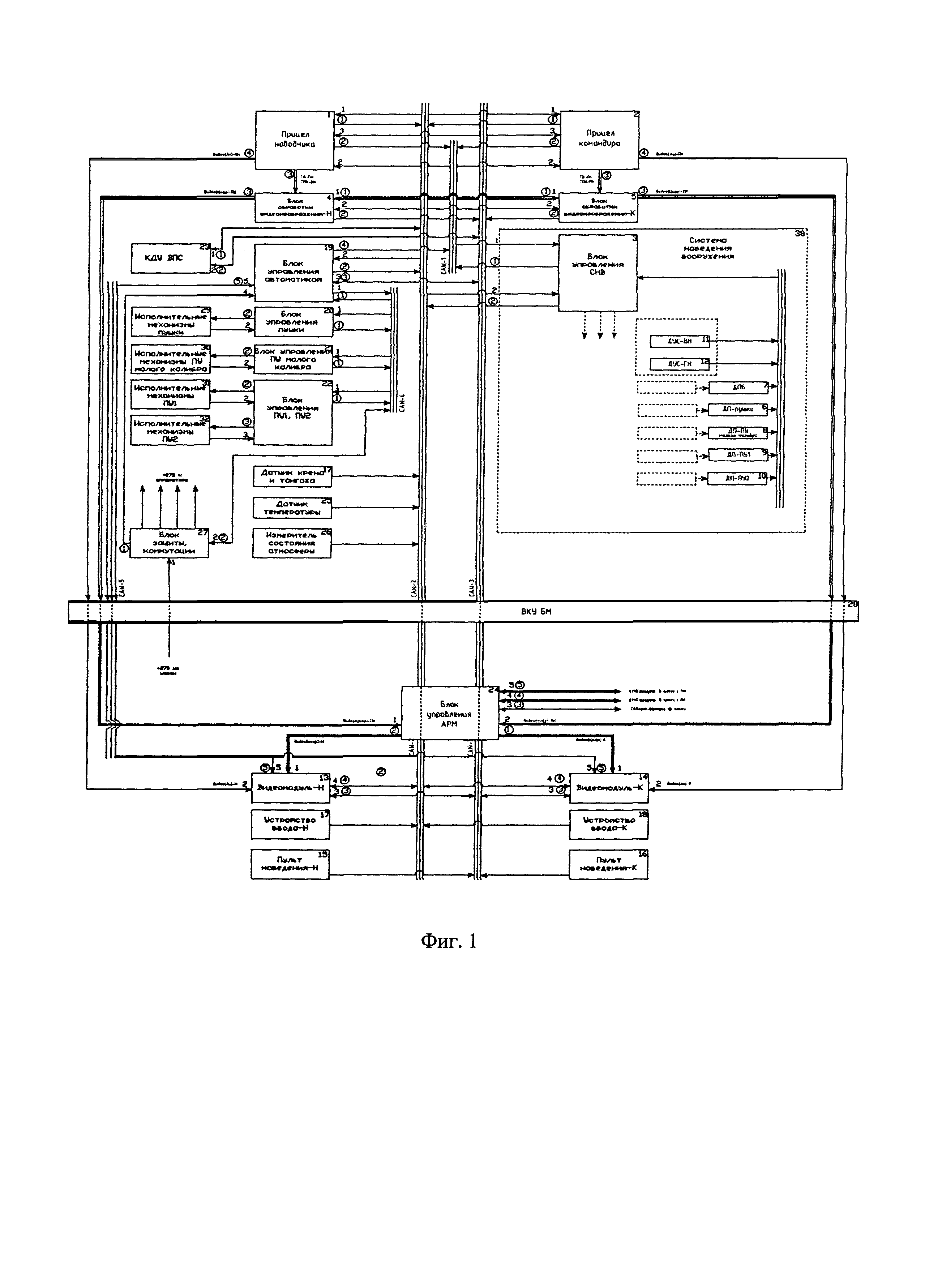
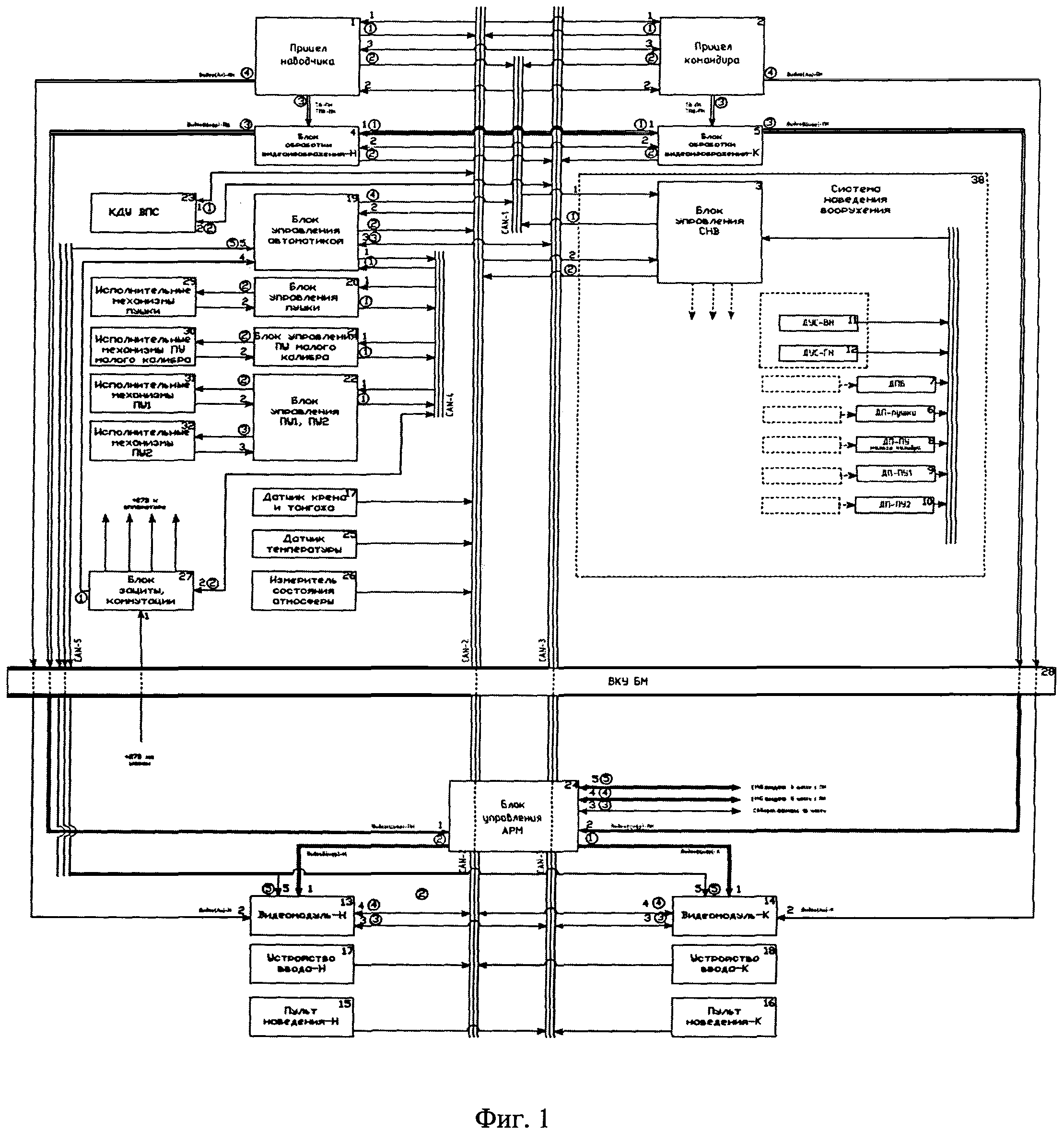
Сущность изобретения, его техническая реализуемость и промышленная применимость поясняются чертежом, представленным на фиг. 1, на котором показана функциональная схема системы управления огнем боевой машины.
Система управления огнем боевой машины (см. чертеж фиг. 1), содержит прицел наводчика (ПН) 1, прицел командира (ПК) 2, блок управления системы наведения вооружения (БУ СНВ) 3, блок обработки видеоизображения (БОВИ) наводчика 4 и БОВИ командира 5, датчик положения пушки 6, датчик положения башни 7, датчики, учитывающие положение по вертикали пусковых установок управляемых ракет (УР) малого калибра 8 и пусковых установок УР большего калибра: левой 9 и правой 10, датчики абсолютных угловых скоростей (ДУС) вертикального 11 и горизонтального 12 наведения пушки, видеомодули наводчика (ВМ-Н) 13 и командира (ВМ-К) 14, пульты командира 15 и наводчика 16, датчик крена и тангажа 17, датчик скорости БМ, устройства ввода наводчика (УВ-Н) 18 и командира (УВ-К) 19, блок управления автоматикой (БУА) 19, блок управления пушкой 20, блок управления ПУ УР малого калибра 21, блок управления ПУ УР большего калибра 22, комплекс дистанционного управления временем подрыва снаряда (КДУ ВПС) 23, блок управления автоматизированным рабочим местом (БУ АРМ) 24, датчик температуры заряда 25, измеритель состояния атмосферы 26, блок защиты и коммутации 27, вращающееся контактное устройство 28, цифровые каналы информационного взаимодействия CAN (CAN-1 - CAN-5), цифровой и аналоговый видеоканалы,
причем первые входы и вторые выходы прицела наводчика (ПН) 1 и прицела командира (ПК) 2 соединены с каналом CAN-2, вторые входы-выходы - с каналом CAN-1, третьи входы - с каналом CAN-3, их четвертые выходы соединены через аналоговые видеоканалы со вторыми входами соответственно видеомодуля наводчика 13 и видеомодуля командира 14, транслируясь через вращающееся контактное устройство (ВКУ) 28, а третьи выходы - соответственно посредством информационноного канала типа Ethernet с БОВИ-Н и БОВИ-К, которые первыми своими входами - выходами соединены между собой с помощью цифрового видеоканала, вторые входы БОВИ-Н 4 и БОВИ-К 5 соединены с каналом CAN-2, а вторые выходы - с CAN-3, а их третьи выходы соединены с помощью цифрового видеоканала соответственно с первым и вторым входами блока управления автоматизированного рабочего места (БУ АРМ) 24, транслируясь через ВКУ 28,
первый-второй выходы БУ АРМ 24 соединены соответственно с первыми входами видеомодуля командира 14 и видеомодуля наводчика 13 с помощью цифрового видеоканала, а третьи-пятые входы-выходы БУ АРМ 24 выполнены с возможностью подсоединения к шасси соответствующей БМ;
третьи входы-выходы видеомодуля наводчика 13 и командира 14 соединены с каналом CAN-3, а их четвертые входы-выходы соединены с каналом CAN-2, выходы устройств ввода 17 и 18 соединены с каналом CAN-2, а выходы пульта наведения наводчика 15 и пульта наведения командира 16 соединены с каналом CAN-3; причем БУ АРМ 24 и вращающееся контактное устройство (ВКУ) 28 транслируют сигналы цифровых информационных каналов CAN-2 и CAN-3;
БУ СНВ 38 своими первым и вторым входом-выходом, являющимися внешними каналами для СНВ, соединены соответственно с каналами CAN-1 и CAN-2;
первый вход-выход блока управления автоматикой (БУА) 19 соединен через внутренний канал CAN-4 с первыми входами-выходами блока управления пушкой 20, блока управления ПУ УР малого калибра 21, вторые входы-выходы которых соединены с исполнительными механизмами соответственно пушки 29 и ПУ УР малого калибра 30, а также соединен с первым входом-выходом блока управления ПУ УР большего калибра 22, вторые и третьи входы-выходы которой соединены соответственно с исполнительными механизмами правой и левой ПУ УР большего калибра 31,32, второй вход-выход БУА соединен с каналом CAN-2, а третий вход-выход - с CAN-3, а четвертый вход соединен с блоком защиты и коммутации 27; а пятый вход-выход - с пятыми входами видеомодуля наводчика 13 и видеомодуля командира 14 посредством канала CAN-5, транслируемого через ВКУ;
датчик крена 17, датчик температуры заряда 25, измеритель состояния атмосферы 26 соединены с БУ АРМ 24 через CAN-2;
КДУ ВПС 23 подключен своим первым входом-выходом к каналу CAN-2, а своим вторым входом-выходом - к CAN-3;
первый вход блока защиты и коммутации 27 соединен с шасси БМ, а его первый выход подключен к БУА (конкретно вторичному источнику питания), а второй вход-выход блока защиты и коммутации 27 подключен к информационному каналу CAN-4.
Блок управления автоматикой (БУА) 24 (см. чертеж фиг. 2) содержит модуль вычисления баллистических поправок (МВБП) 33, модуль управления видеомодулем (МУВМ) 34, модуль управления автоматикой (МУА) 35, блок сопряжения 51, источник вторичного питания 36 и стабилизатор тока 37, причем первые входы-выходы МВБП 33 соединены через CAN-1 с БУ СНВ 3, его второй вход-выход соединен через CAN-2 с прицелами наводчика (командира) 1(3), третий-четвертый МВБП 33 соединены соответственно с выходами датчиков скорости в шасси соответственно БМП-3 и БМП-2 через ВКУ, резервный пятый вход МВБП 33 выполнен с возможностью подсоединения к цифровым каналам RS-485 или RS-232,
первый вход-выход модуля управления автоматикой (МУА) 35 соединен через CAN-2 с БУ АРМ 24, а второй вход-выход МУА 35 соединен аналоговым каналом непосредственно с БУ СНВ 3, а его третий вход-выход - с блоком управления пушки 20, блоком управления ПУ УР малого калибра 21 и блоком управления ПУ УР большого калибра 22 через внутренний цифровой CAN-4;
первый вход-выход МУВМ 34 соединен с цифровым информационным каналом CAN-5, а его второй вход-выход соединен с цифровым каналом CAN-2; вход вторичного источника питания 36 соединен с БЗК 27, а с его выходов запитываются МВБП 33, МУВМ 34, МУА 35 и блок сопряжения 51, первый вход-выход которого соединен с каналом CAN-3, а второй вход-выход - с каналом CAN-4.
Датчики 6-12, 17, 25, 26 предназначены для учета факторов, необходимых для обеспечения точной стрельбы, датчики положения: по горизонтальному каналу - башни 7, по вертикальному каналу - пушки 6, ПУ малого 8 и большего калибра 9-10, абсолютных угловых скоростей наведения стволов пушки 11-12, крена и тангажа 17, атмосферного давления, температуры воздуха, скорости и направления ветра - датчик состояния атмосферы 26, заряда 25.
Для измерения метеорологических параметров атмосферы, учитываемых при вычислении поправок на стрельбу, используется единый измеритель состояния атмосферы (ИСА). ИСА производит измерения атмосферного давления, температуры воздуха, скорости и направления ветра.
Датчик температуры заряда предназначен для измерения температуры окружающей среды в зоне расположения боеприпасов.
БУ СНВ 3 обеспечивает стабилизацию и стабилизированное наведение вооружения при стрельбе с места, с ходу и на плаву всеми видами имеющего в БМ оружия:
- пушки,
- УР малого калибра,
- УР большего калибра.
БУА АРМ 24 обеспечивает управление информационным взаимодействием подсистем СУО и взаимодействие СУО с информационно-управляющей системой БМ, а также распределение на аппаратуру АРМ напряжения питания бортовой сети, формирование и транслирование релейных управляющих команд и реализует следующие функции:
коммутация видеопотоков, передаваемых по цифровым каналам Ethernet от ПН и ПК на приемники видеосигналов: ВМ-Н и ВМ-К аппаратуру шасси; передача видеопотоков от источников видеосигналов в шасси на ВМ-Н и ВМ-К; распределение напряжения питания аппаратуры АРМ; обеспечение информационного обмена БМ с БИУС по каналу CAN; формирование команд управления БМ (аналоговых и по каналу CAN) в режиме внешнего управления; обеспечение информационного обмена между каналами CAN СУО; прием и передача релейных сигналов, поступающих из аппаратуры АРМ в СУО, обеспечивающих режимы стрельбы оружия.
Функции входящих в состав АРМ ВМ 27, 28, ПН-Н 31 и ПН-К 32 схожи с используемым в аналогах и прототипе /1-3/.
УВ-Н 29 и УВ-К 30 предназначены для оперативного управления БМ с рабочих мест наводчика и командира.
БУА 19 конструктивно выполнен в металлическом корпусе, на котором размещены соединительные разъемы, по которым в него подается напряжение питания, а также производится обмен данными с подсистемами СУО и подключение исполнительных подсистем системы автоматики.
В состав БУА 19 входят (см. фиг. 2) модуль вычисления баллистических поправок (МВБП) 33, модуль управления автоматикой (МУА) 35 и модуль управления видеомодулем (МУВМ) 34, а также первичный источник тока 36, включающий стабилизатор тока 37 2А для питания цепей электровоспламенения УР, блок сопряжения 51.
БУА должен обеспечивать следующие функции: выдачу сигналов в БЗК для управления исполнительными устройствами БМ, выдачу сигналов управления по CAN-4 в БУ пушкой, БУ ПУ УР малого калибра, БУ ПУ УР большего калибра, прием, обработку сигналов от датчиков, прицелов, расчет и выдачу баллистических поправок с учетом движения цели и носителя, а также метеоусловий, условий хранения боеприпасов, местоположения цели и носителя, управление режимами функционирования СУО: текущий тип баллистики, выбранный привод, команды на стабилизированные платформы о выбранном источнике сигнала наведения, целеуказание из шасси, хранение информации, например о настреле оружия, номерах блоков, приборов, узлов, не имеющих собственного микроконтроллера, и выдачу этой информации по соответствующему запросу и т.п.
МВБП 33 физически представляет собой плату цифрового баллистического вычислителя и позволяет оперативно вводить практически неограниченное количество баллистик. Для этого в памяти его предусмотрено несколько резервных адресов объемом (количество битов), соответствующим необходимому объему информационного обеспечения (набора коэффициентов) для баллистики вновь разрабатываемых боеприпасов.
Для обеспечения возможности оперативного ввода новой баллистики дополняется информационное программное обеспечение, для чего по новым таблицам стрельбы, основным и поправочным, рассчитывается набор аппроксимирующих коэффициентов для вновь вводимого боеприпаса.
Для отображения информации о вновь разработанном боеприпасе на видеомодуле (ВМ) корректируется (дополняется) программное обеспечение модуля управления видеомодулем ВМ (МУВМ).
БОВИ-Н 4 и БОВИ-К 5, обладающие высокопроизводительными вычислительными средствами, обеспечивают повышение качества и информативности изображения фоноцелевой обстановки на экранах ВМ, автосопровождение целей и режим автоматического поиска и распознавания целей с их ранжированием по степени опасности. Аналогом БОВИ может служить многоканальный телеавтомат для зенитного ракетно-пушечного комплекса «Панцирь».
БЗК 27 обеспечивает подачу напряжения +27 в на блоки аппаратуры БМ и защиту сети от перегрузок и короткого замыкания, управления электромагнитными муфтами приводов ВН блока оружия и ГН, управления стопорами блока оружия и БМ по-походному, выдачу сигналов в БУА в случае отказа какой-либо составной части БЗК. Аналогом БЗК 27 функционально является коробка коммуникационная боевых модулей Б8Я01 «Бахча-У» (Б05Я01 «Бережок»).
ВКУ 28 обеспечивает передачу электрического тока и электрических сигналов, оптических, информационных и видеосигналов из шасси на вращающееся боевое отделение.
КДУ ВПС 23 реализует дистанционное управление временем подрыва снаряда с многофункциональным взрывателем на траектории, а также обеспечивает обмен информацией с СУО БМ. Аналогом могут служит системы дистанционного подрыва отечественные типа «Форсайт» для 30-мм боеприпасов и зарубежные типа «Айнет» в 40-мм пушках фирмы Bofors, а также внедренные на 30-мм боеприпасах в БМП «Puma».
Информационное взаимодействие в СУО осуществляется по цифровым каналам. В качестве основного протокола информационного взаимодействия выбран протокол CAN 2.0 в соответствии со стандартом ISO 11898. При организации информационного взаимодействия была определена необходимость использования нескольких независимых каналов CAN 2.0 с разной скоростью передачи данных.
Канал CAN-1 реализует обмен информацией между БУ СНВ и системами стабилизации ПН и ПК (управление режимами работы СНС, передача величин углов положения линии визирования прицелов и углов слежения для СНС).
Канал CAN-2 реализует передачу команд управления и данных (опросы состояния), признаков режимов работы составных частей СУО, информации с датчиков внешних условий и исходных данных для расчета баллистических поправок, диагностической информации.
Канал CAN-3 обеспечивает передачу пропорциональных команд управления наведением линии визирования от различных источников (БОВИ-Н, БОВИ-К, БУ АРМ, ПН-Р, ПН-К, ВМ-Н, ВМ-К). CAN-3 также входит в обратную связь контура наведения в режиме автосопровождения.
Канал CAN-4 служит для передачи команд управления и данных (опросы состояния) между блоками аппаратуры электроавтоматики: БУА, БУ пушки, БУ ПУ УР малого калибра, БУ ПУ УР большего калибра.
Канал CAN-5 обеспечивает взаимодействие БУА с ВМ-Н, ВМ-К.
Для передачи в БОВИ и АРМ цифрового видеосигнала с ТВ и ТПВ каналов ПН и ПК применены оптоволоконные линии связи, что позволяет передавать большие объемы видеоданных через ВКУ БМ.
Принцип функционирования СУО заключается в традиционно используемом в СУО подобного типа БМ принципе «марка на цели», при котором наведение оружия на цель заключается в сопровождении цели линией визирования (центром прицельной марки на экране ВМ), реализуемой прицелом наводчика (командира) в ручном или БОВИ в автоматическом режиме, и постоянном отслеживании линии визирования стволами оружия с учетом рассчитанных угловых поправок.
Линия визирования прицела имеет независимую двухплоскостную гироскопическую стабилизацию, а ее наведение по каналам вертикального и горизонтального наведения выполняется от ПН-Н и ПН-К, либо БОВИ в режиме автосопровождения по командам, пропорциональным требуемой скорости наведения. Режимы работы СУО в целом и отдельных составных ее частей задается совокупностью команд управления, поступающих из аппаратуры АРМ и формируемых БУА.
Функционирование комплекса вооружения обеспечивается совместной работой СУО и аппаратурой электроавтоматики в составе: БУА, БУ пушки, БУ ПУ УР малого калибра, двух БУ ПУ большего калибра, БЗК, а также аппаратуры КДУ ВПС (установка взрывателя неуправляемого выстрела.
Взаимодействие аппаратуры АРМ, расположенной в шасси, и подсистемами СУО, расположенными во вращающейся части БМ, осуществляется посредством электрических и оптических цепей, транслируемых через ВКУ.
Аналоговые видеосигналы с выходов ТВ и ТПВ каналов ПН и ПК, транслируемые через ВКУ БМ непосредственно на ВМ, обеспечивают дублирующие режимы работы СУО.
В отличие от ранее созданных комплексов вооружения легкобронированной техники типа «Бахча» и «Бережок» аппаратура управления БО, входящая в состав АРМ-Н и АРМ-К, унифицирована и позволяет полностью дублировать работу обоих прицелов с любого рабочего места. Приоритет управления определяется экипажем.
В режиме «Основной» вооружение, с которого осуществляется стрельба, отслеживает с помощью электромеханических приводов положение стабилизированной линии визирования ПН, наведение которой производит наводчик при помощи ПН-Н, при этом в СУО выдаются команды на измерение дальности, стрельбу, переключение типов боеприпасов, а также управление функциями ПН. Наводчик может использовать автомат сопровождения цели, реализуемый БОВИ.
Командир в режиме «Основной» при помощи ПН-К производит поиск целей в ручном, полуавтоматическом и автоматическом режимах, производит замеры дальности до цели, при этом в СУО выдаются команды на измерение дальности через ПК, производит наведение стабилизированной линии визирования ПК, выдает целеуказание наводчику с возможностью передачи захваченной автоматом сопровождения целью, управляет функциями ПН (изменение полей зрения, выполнение настройки и корректировки ТВ и ТПВ изображений (яркость, контрастность, фокусировка).
В режиме «Основной» БВБП, входящий в состав БУА, рассчитывает и отрабатывает поправки вертикального и горизонтального упреждения с учетом следующих параметров: типа боеприпаса, текущей дальности до цели, температуры воздуха, температуры заряда, атмосферного давления, боковой и продольной составляющей ветра, угловой скорости линии визирования, угла крена машины, угла места цели.
Соответствующая информация поступает с датчиков внешних условий 25, 26, датчика крена и тангажа 7, внутренних датчиков положения, поступающих по цифровым каналам связи CAN. Угловая скорость цели определяется с использованием значений команд наведения, поступающих по цифровому каналу на вход ПН.
В режиме «Основной» можно выделить следующие подрежимы: «Измерение дальности», «Установка типа боеприпаса», «Изменение полей зрения», «Компенсация уводов», «Автоматический поиск целей», «Работа с «АСЦ», «Работа с ОЛО», «Охотник-стрелок», «Цу», «Подслеживание», «Внешнее целеуказание», а также подрежимы стрельбы из пушки и пулемета, стрельбы УР малого и УР большего калибра.
Управление режимами работы СУО (смена режимов работы СУО) осуществляется с УВ-Н (УВ-К) активацией соответствующих кнопок. При этом в канал информационно-логического взаимодействия CAN-2 выдаются команды управления, по которым обеспечивается переключение режимов работы СУО без задержек и прерываний работы.
Таким образом, заявляемая в качестве изобретения система управления огнем БМ позволяет:
- повысить точность стрельбы и быстродействие комплекса вооружения за счет использования цифровых датчиков углового положения и угловых скоростей с более низкими значениями абсолютной погрешности выходного сигнала, за счет цифровой обработки видеоизображений, поступающих с каналов технического зрения прицельного комплекса, в режиме реального времени, раздельно по каналам наводчика и командира; непосредственной передачи сигналов в цифровом коде, без дополнительных промежуточных преобразований величин, что позволяет устранить дополнительные погрешности;
- повысить огневую мощь, обеспечив эффективное поражение в широком диапазоне условий боевого применения всей номенклатуры целей, предназначенных для БМ рассматриваемого типа, путем использования помимо пушки, двух типов управляемого вооружения, появляется возможность выбора для каждого типа цели специализированного оружия, при этом пусковые установки УР работают в режиме независимой стабилизации, аналогично основному вооружению;
- повысить поисковые и обнаружительные возможности БМ в несколько раз за счет использования высокопроизводительных вычислительных средств БОВИ, раздельно оператора и командира, позволяющих реализовать автоматическую систему поиска и сопровождения целей, за счет чего значительно, в несколько раз, сокращается время и повышается вероятность выявления целей по сравнению с режимами ручного поиска; за счет обеспечения одновременной обработки видеоинформации в различных спектральных диапазонах, ранжирования целей по степени опасности и определения координат, одновременного автоматического сопровождение нескольких целей в поле зрения прицела;
- повысить вероятности поражения целей типа танкоопасная живая сила, расположенных как открыто, так и в фортификационных сооружениях (укрытиях), создание предпосылок для более эффективной борьбы с воздушными целями, особенно легкоуязвимыми типа ДПЛА, повышение вероятности поражения легкобронированных целей за счет обеспечения воздушного подрыва осколочно-фугасных снарядов;
- обеспечить дистанционное управление вооружением (необитаемое боевое отделение) за счет использования современных эффективных каналов технического зрения;
- расширить функциональные возможности БМ, в т.ч. за счет блочно-модульного принципа построения СУО, что позволяет оперативно видоизменять конфигурацию и компоновать СУО различных вариантов исполнения в зависимости от решаемых БМ задач и стоимостных ограничений; реализация различных функций, в т.ч. новых, достигается за счет доработки и корректировки программного обеспечения подсистем СУО без изменения их аппаратной реализации;
- повысить эксплуатационные характеристики системы управления и возможности его диагностики и адаптации к другим комплексам управления вооружением за счет наличия информационных каналов обмена между аппаратурой системы управления боевого отделения.
Предлагаемая система является унифицированной и может в полном или усеченном виде применяться в составе различных типов бронированной техники: танков, БМП, БТР, а также для объектов стационарного или морского базирования.
Таким образом, поставленные в заявке технические задачи достигнуты.
Приведенные в описании технические преимущества системы, реализованной по заявляемой структурной схеме, подтверждены испытаниями опытных образцов на испытательной базе АО «КБП» и внешних базах.
Контейнер для запуска боеприпаса
Способ и устройство инициирования воздушно-динамического рулевого привода управляемой авиабомбы, способ проверки готовности воздушно-динамического рулевого привода перед сбросом управляемой авиабомбы, воздушно-динамический рулевой привод и аппаратура управления воздушно-динамическим рулевым приводом авиабомбы
Отсек рулевого привода управляемой ракеты
Устройство для складывания антенны боевой машины
Система питания автоматического оружия
Система питания атоматического оружия
Способ стрельбы комплекса вооружения боевой машины по цели и система для его осуществления, способ определения экспериментальной зависимости угловой скорости линии визирования
Стопор блока оружия
Боевая машина
Механизм перезарядки стрелкового оружия
Боевое отделение бронеобъекта
Система питания автоматической пушки
Пусковая установка

