Результат интеллектуальной деятельности: СПОСОБ И КОМПЬЮТЕР ДЛЯ КОНТРОЛЯ БОКОВЫХ ЗЕРКАЛ ЗАДНЕГО ВИДА В АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВАХ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0001] Настоящая заявка относится к способу, компьютеру и транспортному средству для контроля боковых зеркал заднего вида в автономных транспортных средствах.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Транспортные средства могут быть оборудованы для работы как в автономном, так и в пилотируемом находящимся внутри человеком (occupant) режиме. Такие транспортные средства включают боковые зеркала заднего вида, которые выдвигаются для пилотируемого находящимся внутри человеком режима. Применительно к автономной работе, транспортное средство полагается на данные от датчиков, таких как камеры, LiDAR и радар, и ему не требуется использование боковых зеркал заднего вида. В данном случае, боковые зеркала заднего вида могут быть убраны для того, чтобы уменьшать аэродинамическое сопротивление. Тем не менее, из-за неисправной работы боковые зеркала заднего вида могут оставаться застрявшими в выдвинутом положении. Это может остаться незамеченным для находящегося внутри человека, который не управляет транспортным средством, во время автономной работы и/или транспортное средство может быть без людей внутри.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления охарактеризован способ, содержащий этапы, на которых: разворачивают зеркало в первом транспортном средстве в первое положение; принимают, от второго транспортного средства, первое изображение, представляющее упомянутое зеркало; разворачивают упомянутое зеркало во второе положение; принимают второе изображение, представляющее упомянутое зеркало; и анализируют первое и второе изображение, чтобы определить рабочее состояние упомянутого зеркала.
В дополнительном варианте осуществления рабочее состояние является одним из: зеркало застряло в первом положении; зеркало застряло во втором положении; зеркало застряло между первым и вторым положениями; и зеркало может быть развернуто в каждое из первого и второго положений.
В дополнительном варианте осуществления выводят рабочее состояние на, по меньшей мере, одно из дисплея и удаленного вычислительного устройства.
В дополнительном варианте осуществления определяют, через связь типа «транспортное средство-с-транспортным средством», перед этапом, на котором разворачивают зеркало в первое положение, что второе транспортное средство является доступным, чтобы участвовать в верификации зеркала.
В дополнительном варианте осуществления активируют, перед этапом, на котором принимают первое изображение, указатель поворота на зеркале.
В дополнительном варианте осуществления определяют, перед этапом, на котором разворачивают зеркало в первое положение, что уровень яркости окружающего света находится ниже предварительно определенной пороговой величины яркости.
В дополнительном варианте осуществления определяют, на основании, по меньшей мере частично, определения, что разность между интенсивностью света указателя поворота на первом изображении и интенсивностью света указателя поворота на втором изображении выше пороговой величины, что зеркало может быть развернуто в каждое из первого и второго положений.
В дополнительном варианте осуществления определяют, на основании, по меньшей мере частично, определения, что разность между интенсивностью света указателя поворота на первом изображении и интенсивностью света указателя поворота на втором изображении меньше пороговой величины, что зеркало является нерабочим, при этом нерабочее соответствует одному из следующего: (1) застряло в первом положении, (2) застряло во вторых положениях, и (3) застряло между первым и вторым положениями.
В дополнительном варианте осуществления первое и второе изображения принимаются от датчика, включенного во второе транспортное средство, при этом способ дополнительно содержит этапы, на которых: определяют, что второе транспортное средство находится впереди первого транспортного средства; определяют, что интенсивность света указателя поворота выше предварительно определенной пороговой величины на втором изображении; и на основании интенсивности света указателя поворота на втором изображении, которая выше предварительно определенной пороговой величины, определяют, что зеркало застряло в первом положении.
В дополнительном варианте осуществления второе транспортное средство обращено к первому транспортному средству.
В дополнительном варианте осуществления определяют, что солнце находится позади первого транспортного средства; и определяют рабочее состояние зеркала на основании разности в отраженном свете от солнца между первым изображением и вторым изображением.
В еще одном варианте осуществления охарактеризован компьютер запрограммированный, чтобы выполнять способ по любому из вариантов осуществления.
В еще одном варианте осуществления охарактеризовано транспортное средство, содержащее компьютер, запрограммированный, чтобы выполнять способ по любому из вариантов осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
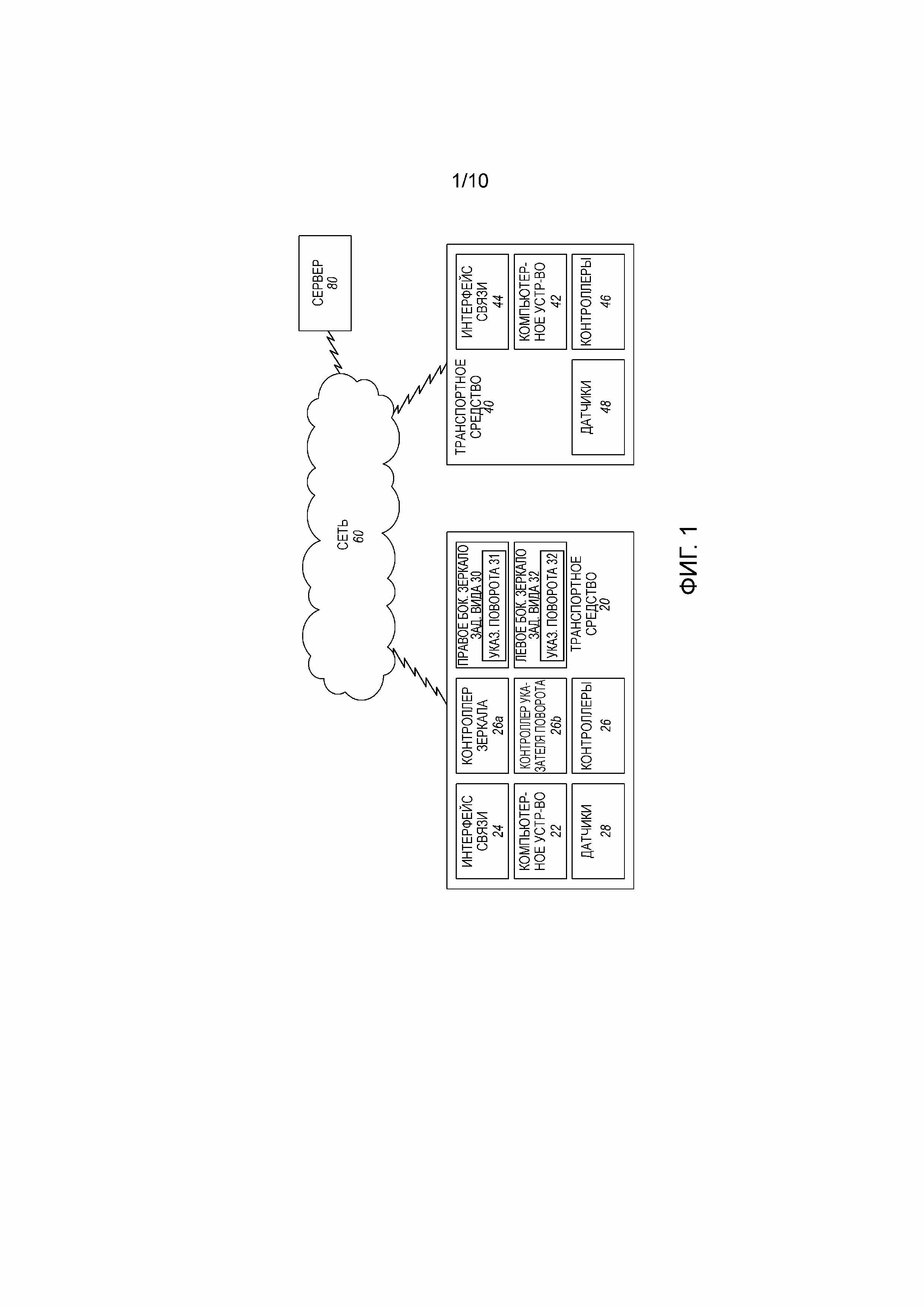
[0003] Фигура 1 является структурной схемой примерной системы для мониторинга и контроля боковых зеркал заднего вида транспортного средства.
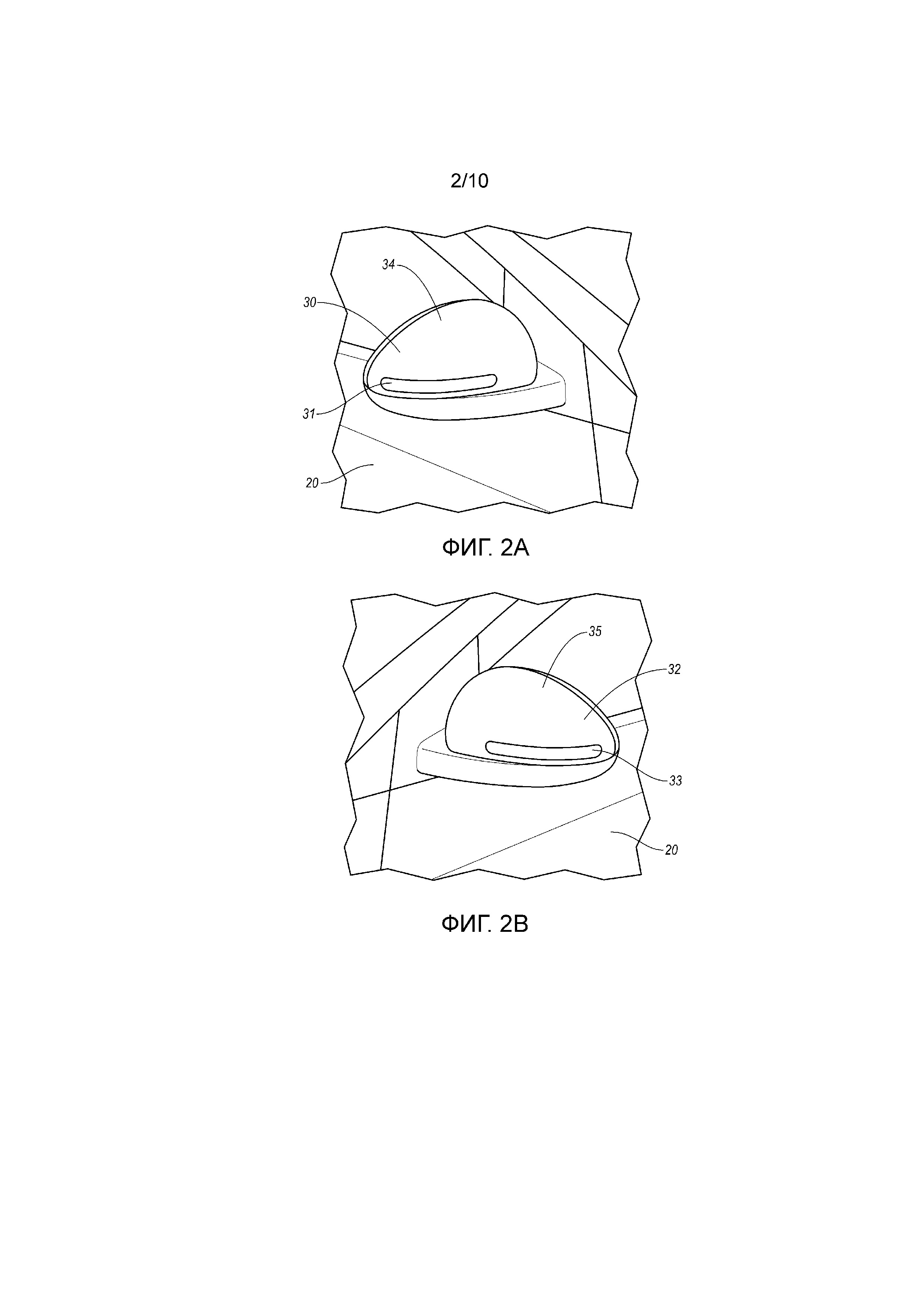
[0004] Фиг. 2A является видом в перспективе примерного правого бокового зеркала заднего вида транспортного средства, включающего в себя указатель поворота.
[0005] Фиг. 2B является видом в перспективе примерного левого бокового зеркала заднего вида транспортного средства, включающего в себя указатель поворота.
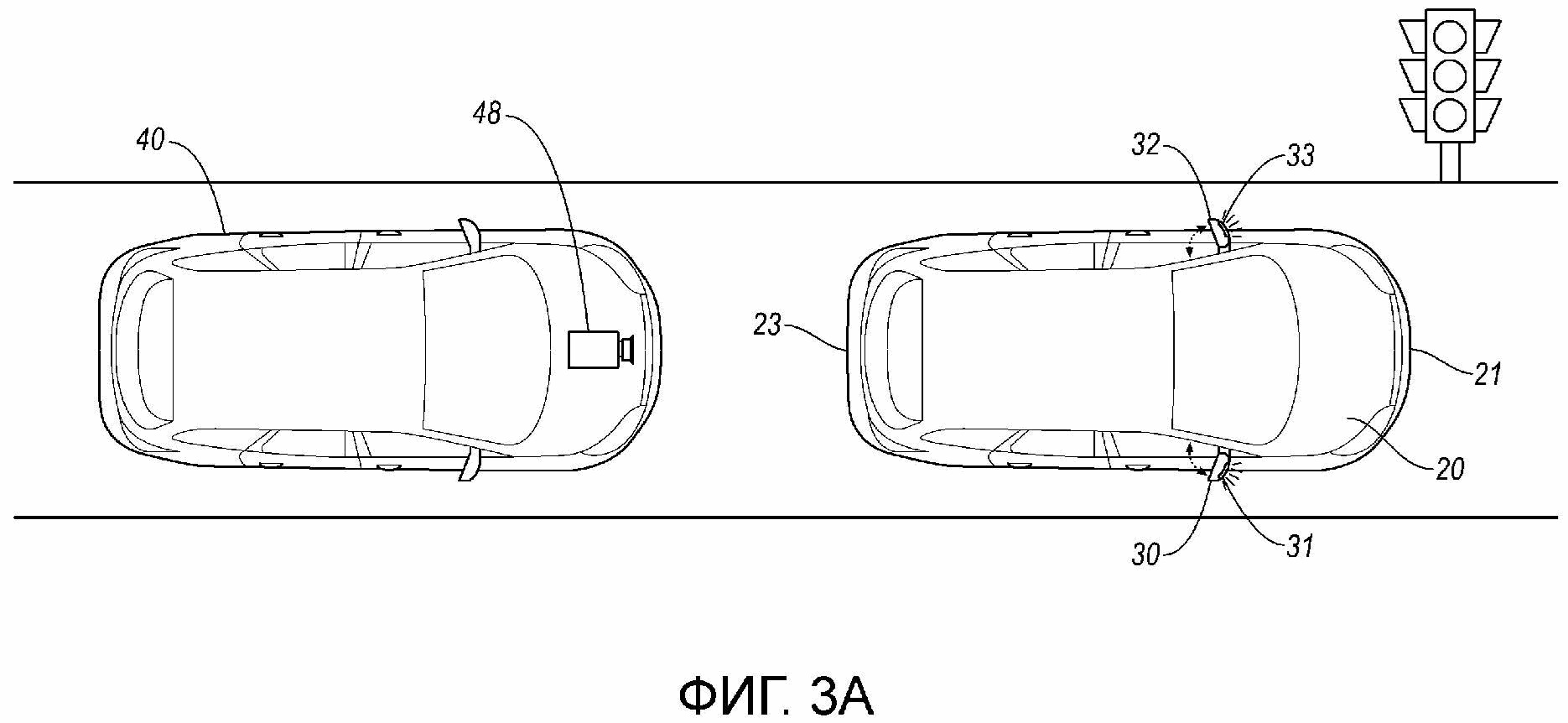
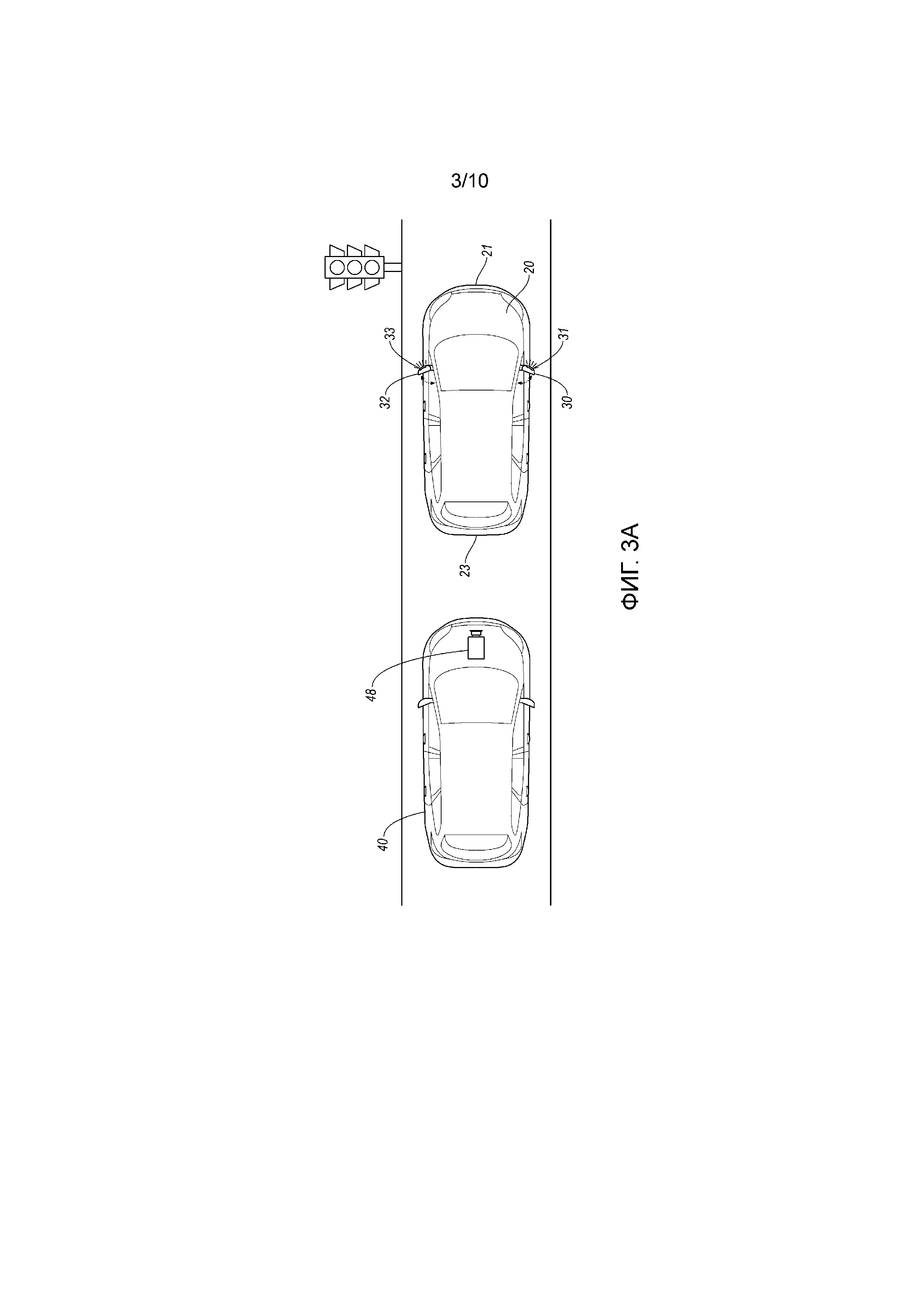
[0006] Фиг. 3A является видом сверху первого транспортного средства с выдвинутыми боковыми зеркалами заднего вида, за которым следует второе транспортное средство.
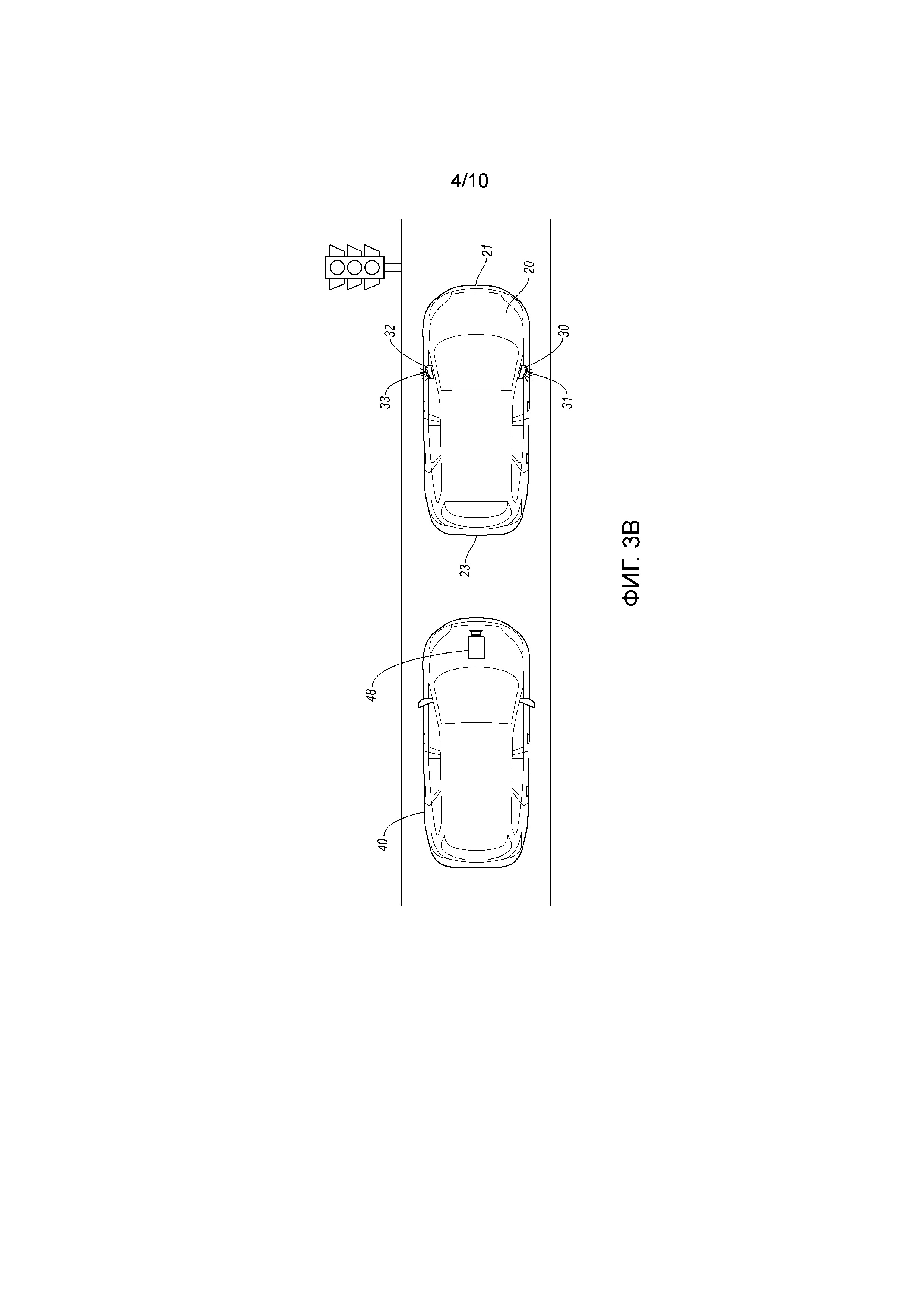
[0007] Фиг. 3B является видом сверху первого транспортного средства с убранными боковыми зеркалами заднего вида, за которым следует второе транспортное средство.
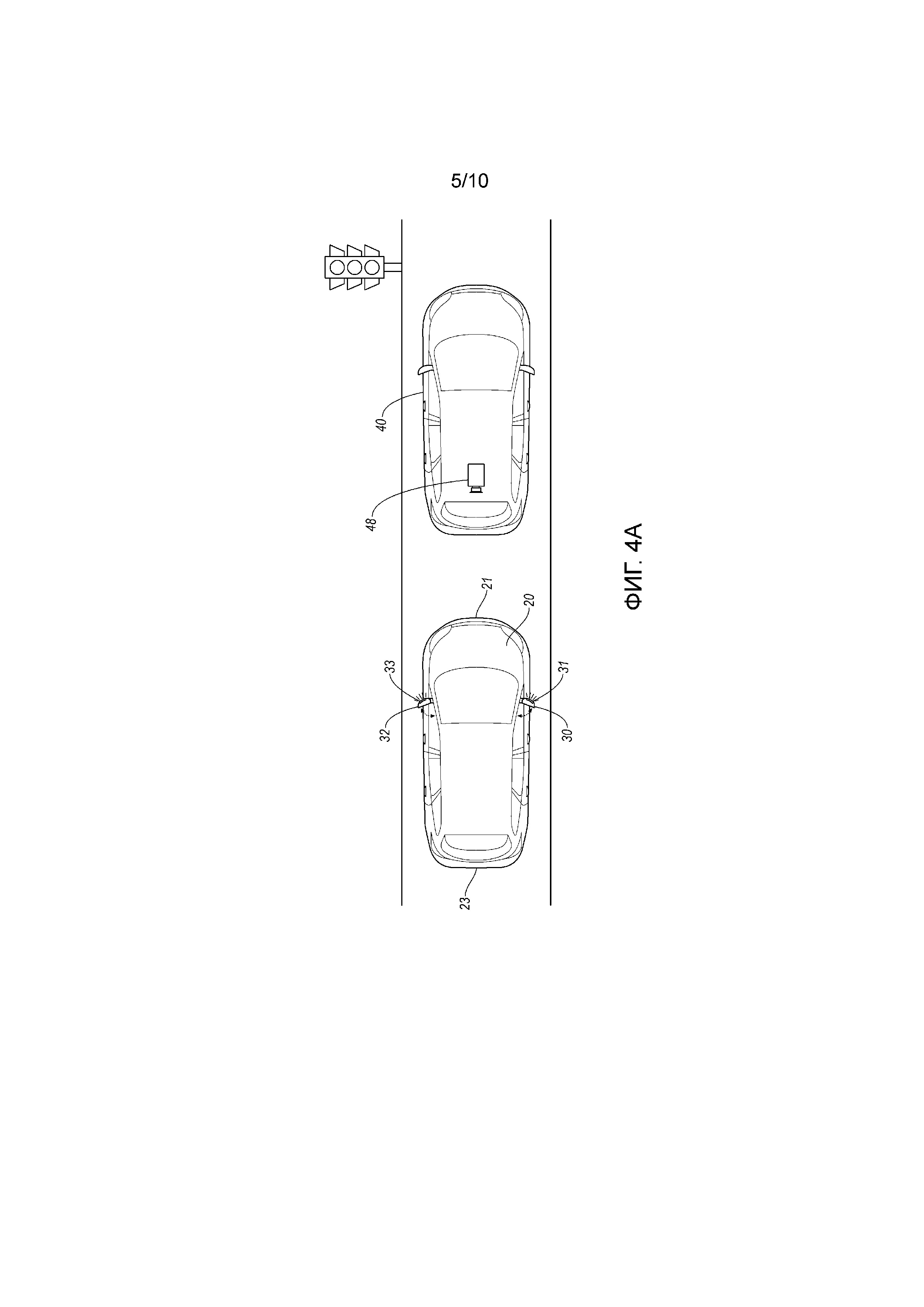
[0008] Фиг. 4A является видом сверху первого транспортного средства с выдвинутыми боковыми зеркалами заднего вида, позади второго транспортного средства.
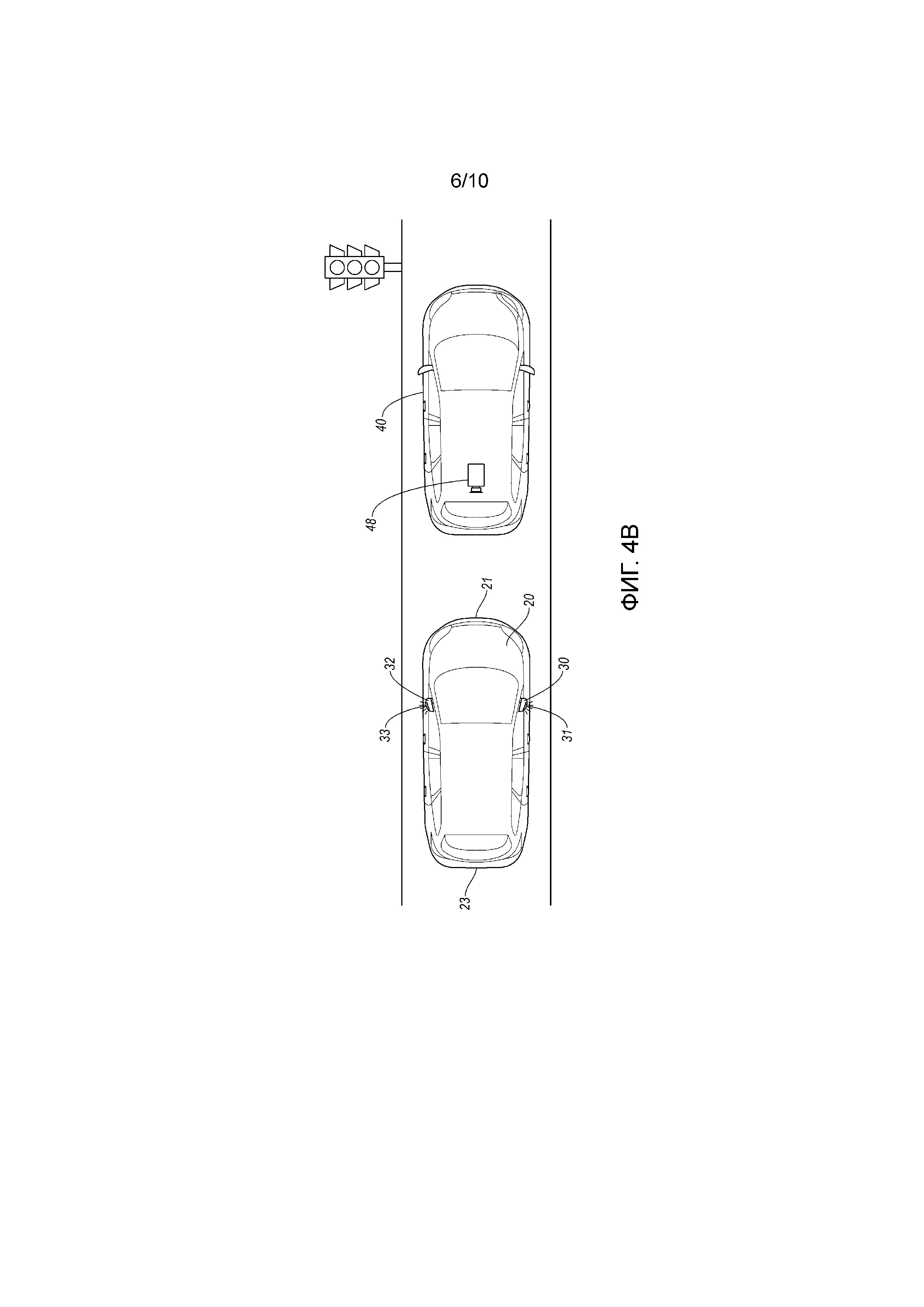
[0009] Фиг. 4B является видом сверху первого транспортного средства с убранными боковыми зеркалами заднего вида, позади второго транспортного средства.
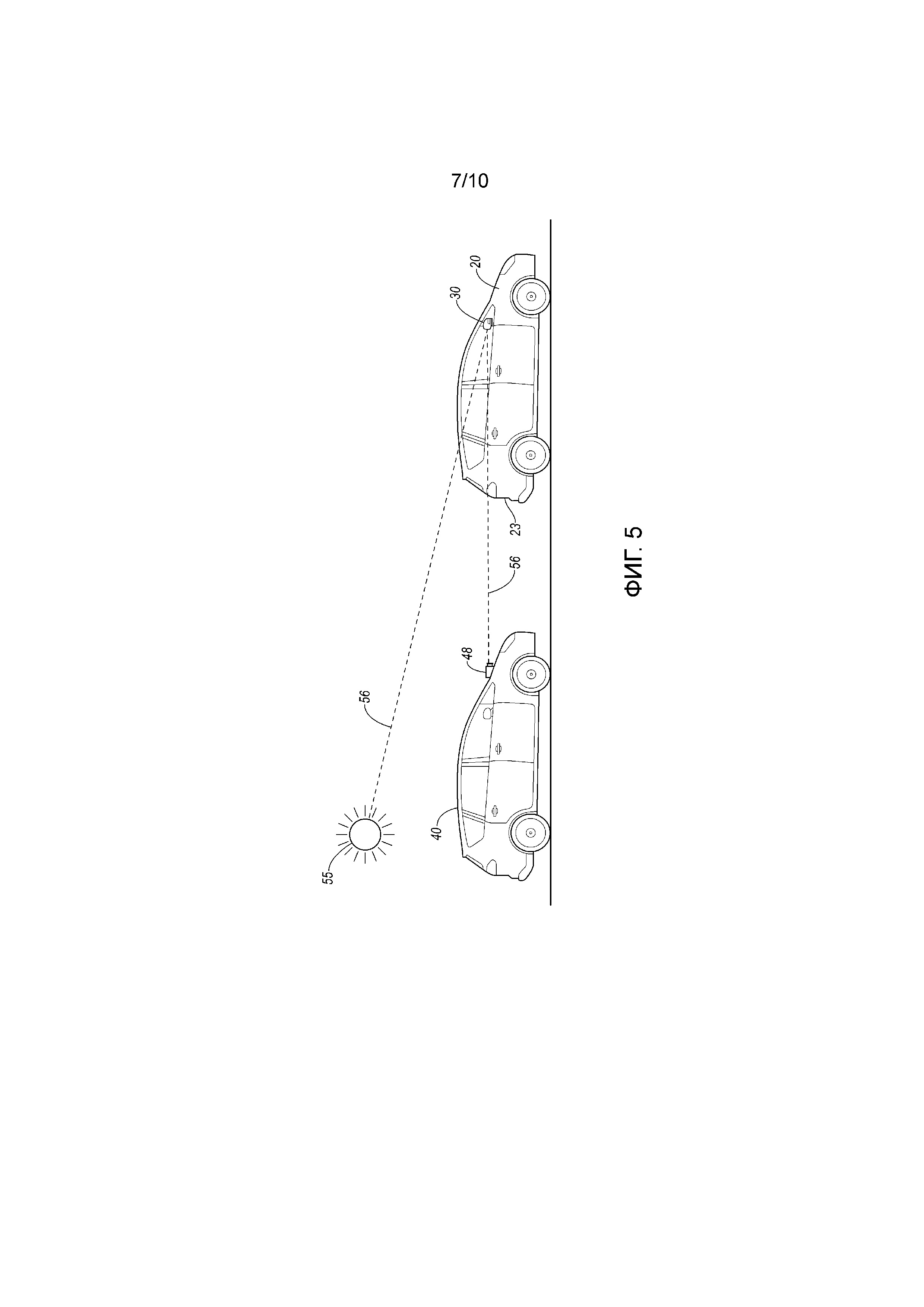
[0010] Фигура 5 является видом сбоку первого транспортного средства с боковым зеркалом заднего вида, отражающим солнечный свет таким образом, что датчик на втором транспортном средстве может обнаруживать солнечный свет.
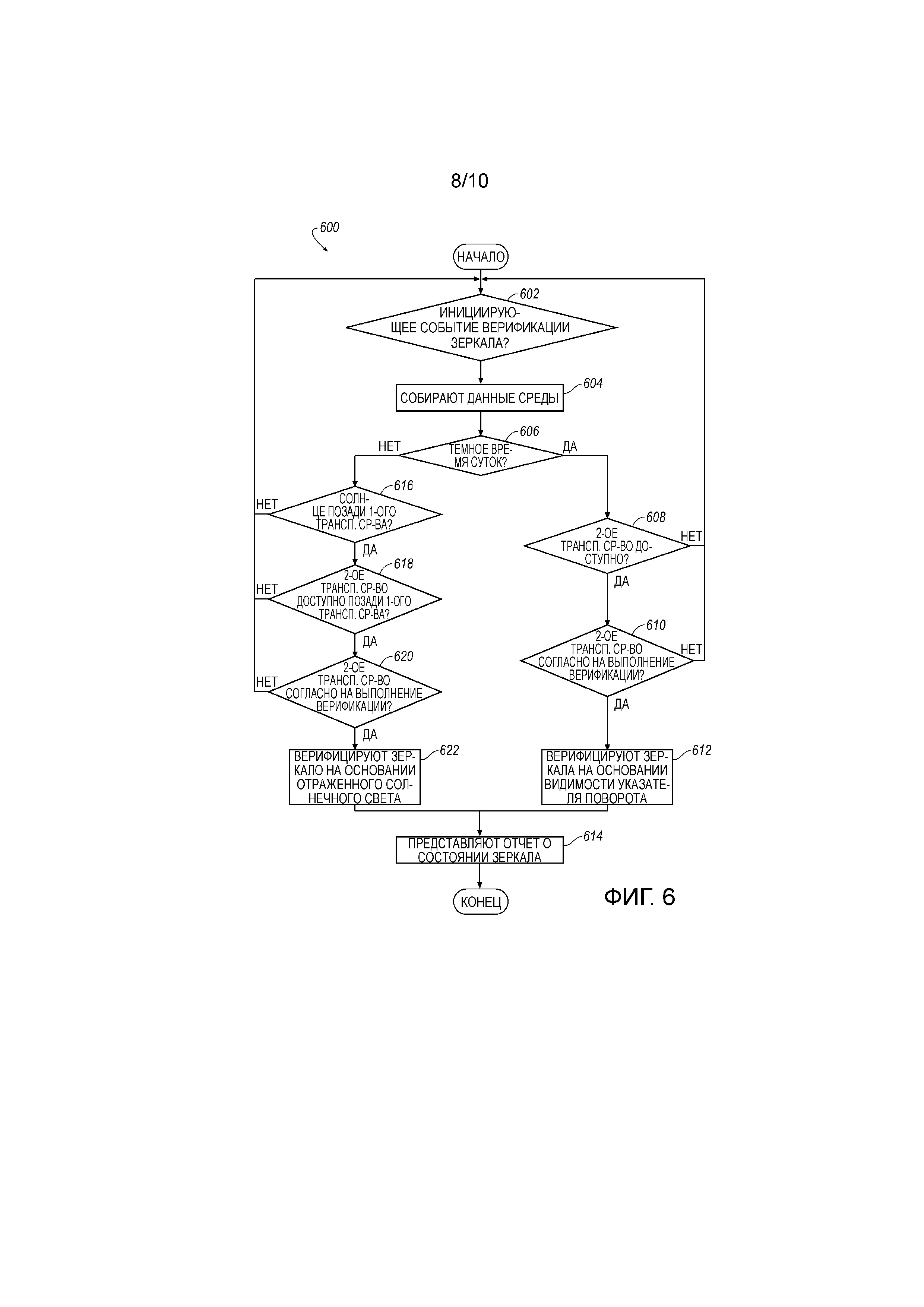
[0011] Фигура 6 является схемой примерного процесса, чтобы определять рабочее состояние боковых зеркал заднего вида для первого транспортного средства.
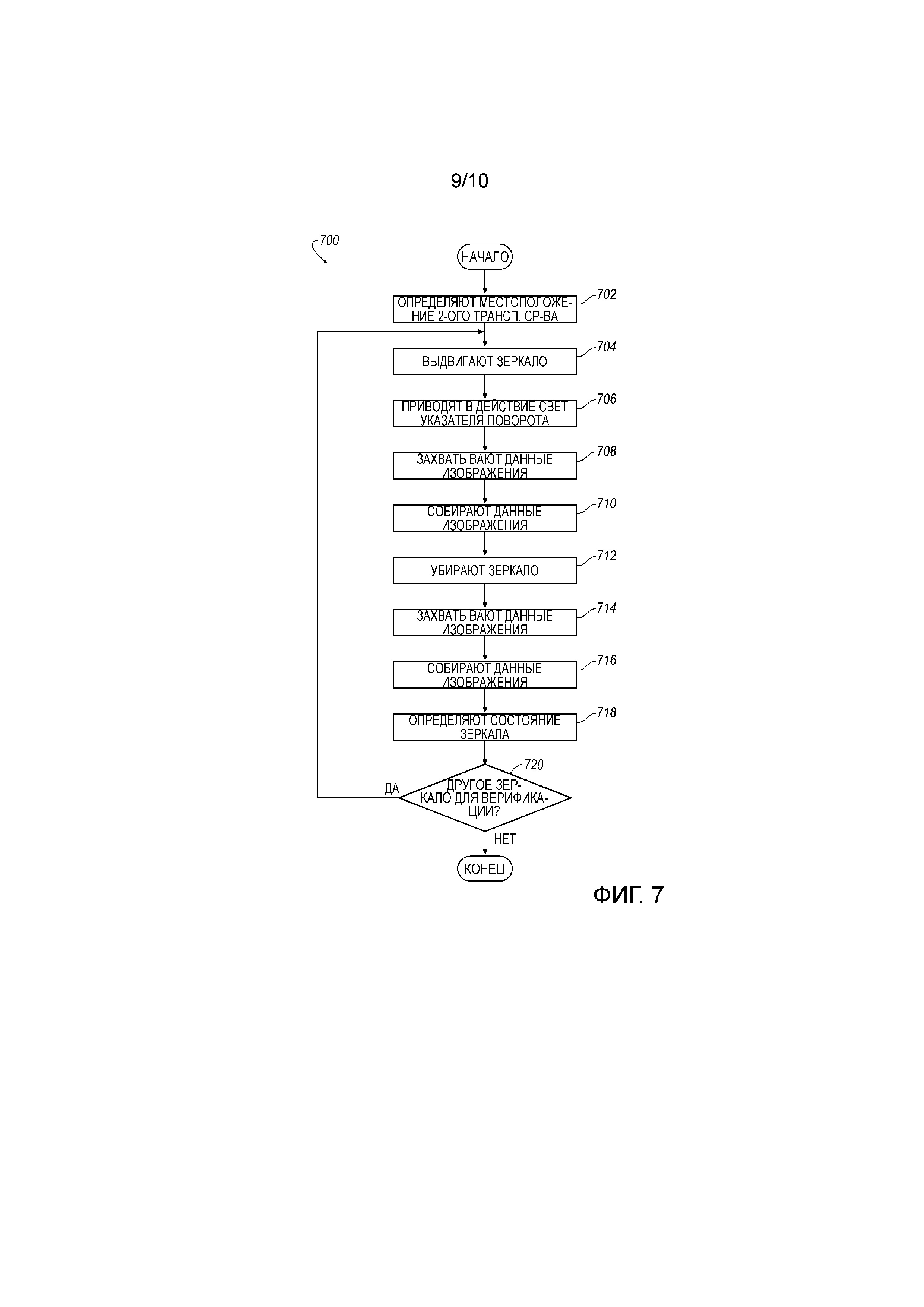
[0012] Фигура 7 является схемой примерного суб-процесса, чтобы определять рабочее состояние бокового зеркала заднего вида у первого транспортного средства во время работы в темное время суток.
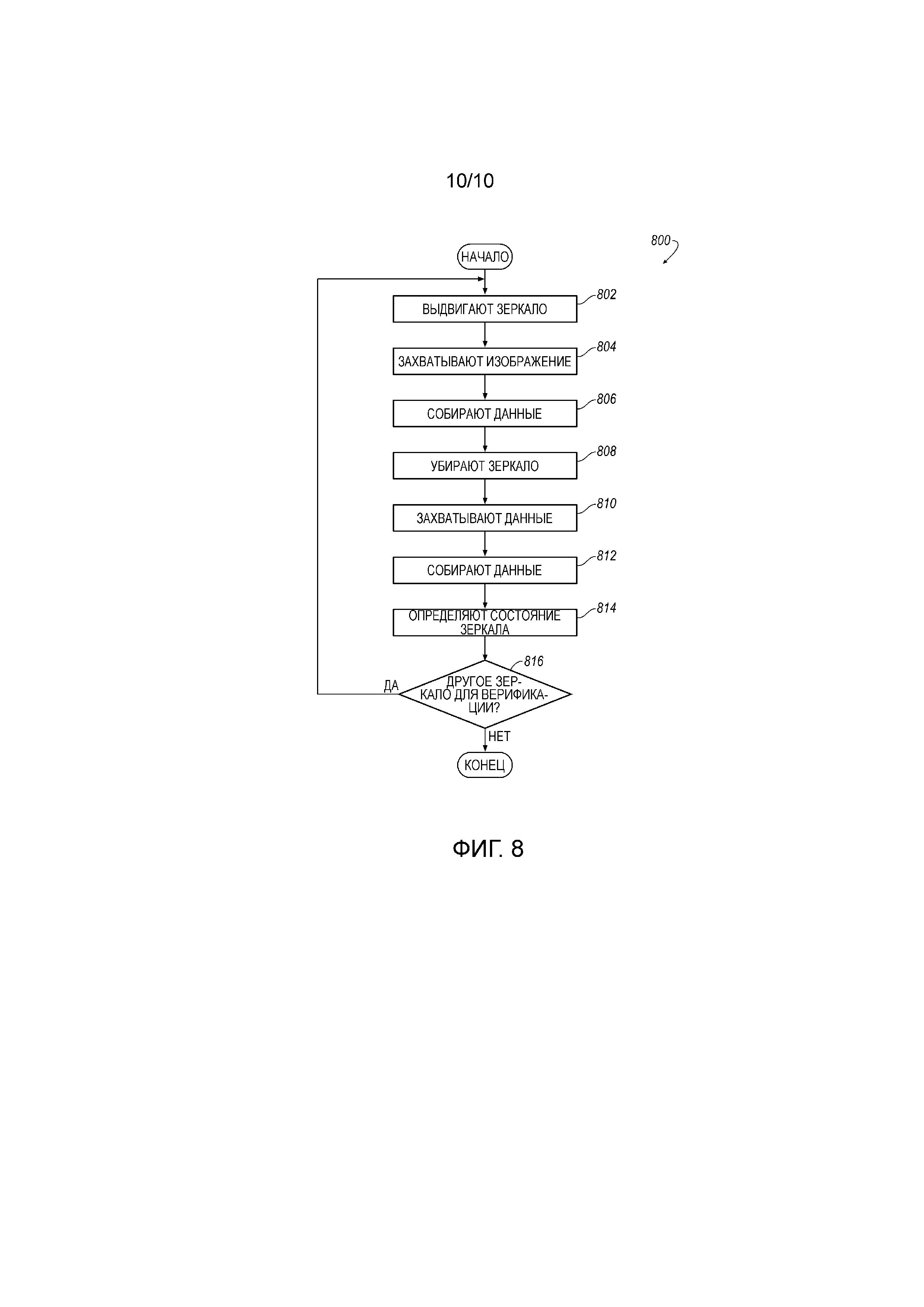
[0013] Фигура 8 является схемой примерного суб-процесса, чтобы определять рабочее состояние бокового зеркала заднего вида у первого транспортного средства во время работы в светлое время суток.
ПОДРОБНОЕ ОПИСАНИЕ
[0014] Вычислительное устройство может определять рабочее состояние бокового зеркала заднего вида первого транспортного средства на основании данных изображения, т.е., изображений, от датчиков на втором транспортном средстве. Боковые зеркала заднего вида могут быть определены в качестве механических, т.е., включающих в себя физическую поверхность, которая отражает свет, и которая, таким образом, может обеспечивать зеркальное изображение, или виртуальных, например, основанных на видео устройств, прикрепленных внешним образом к кузову транспортного средства, которые предоставляют цифровое изображение на экране отображения, чтобы помогать находящемуся внутри человеку при пилотировании транспортного средства посредством предоставления видов зон вокруг транспортного средства.
[0015] Рабочее состояние, как используется в данном раскрытии, означает состояние зеркала по отношению к тому, может ли зеркало перемещаться между выдвинутым и убранным положениями. Например, боковое зеркало заднего вида может быть подвижным между первым, выдвинутым положением для использования находящимся внутри человеком у транспортного средства, например, чтобы видеть сектор обзора позади и/или сбоку транспортного средства, и вторым, убранным положением, чтобы уменьшать аэродинамическое сопротивление во время автономной работы транспортного средства. Состояние бокового зеркала заднего вида определяется как «рабочее», когда определяется, что оно может быть развернуто в каждое из первого и второго положений. Состояние бокового зеркала заднего вида является «нерабочим», когда определяется, что боковое зеркало заднего вида не может быть развернуто в одно или оба из первого и второго положений. Нерабочие состояния включают в себя следующее: застряло в первом положении, застряло во втором положении, и застряло между первым и вторым положениями.
[0016] Для того, чтобы определять рабочее состояние, вычислительное устройство разворачивает боковое зеркало заднего вида на первом транспортном средстве в первое, выдвинутое положение для пилотирования находящимся внутри человеком. Вычислительное устройство собирает, через, например, связь типа «транспортное средство-с-транспортным средством», первые данные изображения от датчиков, включенных во второе транспортное средство, причем первые данные изображения указывают положение бокового зеркала заднего вида после разворота в первое положение. Вычислительное устройство затем разворачивает боковое зеркало заднего вида у первого транспортного средства во второе, убранное положение и собирает вторые данные изображения с датчиков, включенных во второе транспортное средство, указывающие положение бокового зеркала заднего вида.
[0017] Как описывается подробно ниже, на основании сравнения первых данных со вторыми данными, вычислительное устройство определяет рабочее состояние бокового зеркала заднего вида.
[0018] Разворот бокового зеркала заднего вида определяется в данном документе как изменение положения (т.е., перемещение по отношению к одной или более осям, которые могут быть определены для трехмерной системы координат) бокового зеркала заднего вида по отношению к кузову транспортного средства, к которому оно прикреплено. Позиционирование или складывание бокового зеркала заднего вида так, чтобы уменьшать аэродинамическое сопротивление, означает что зеркало находится в «убранном» состоянии. Разворот бокового зеркала заднего вида в положение для пилотирования находящимся внутри человеком означает, что зеркало находится в «выдвинутом» состоянии. Боковые зеркала заднего вида в любом положении отличном от «выдвинутого» или «убранного» определяются как находящиеся в «неправильно развернутом» состоянии.
[0019] Слова, используемые в данном документе, указывающие направления, ассоциированные с первым и вторым транспортным средством, такие как, передняя часть, задняя часть, назад, вперед, обратный, впереди, позади, ведущий, следующий, противоположный, обращенный, слева, справа, и т.д., имеют свое обычное значение для транспортного средства с точки зрения находящегося внутри человека у транспортного средства, сидящего на сиденье находящегося внутри человека с руками находящегося внутри человека на рулевом колесе.
[0020] Способ содержит этапы, на которых: разворачивают зеркало транспортного средства в первое положение; принимают, от второго транспортного средства, первое изображение, представляющее зеркало; разворачивают зеркало во второе положение; принимают второе изображение, представляющее зеркало; и анализируют первое и второе изображение, чтобы определить рабочее состояние зеркала. В способе, рабочее состояние может быть одним из: зеркало застряло в первом положении, зеркало застряло во втором положении, зеркало застряло между первым и вторым положениями, и зеркало может быть развернуто в каждое из первого и второго положений.
[0021] Способ может дополнительно содержать этап, на котором выводят рабочее состояние на, по меньшей мере, одно из следующего: дисплей и удаленное вычислительное устройство. Способ может дополнительно содержать этап, на котором определяют, через связь типа «транспортное средство-с-транспортным средством», перед этапом, на котором разворачивают зеркало в первое положение, что второе транспортное средство является доступным, чтобы участвовать в верификации зеркала. Способ может дополнительно содержать этап, на котором активируют, перед этапом, на котором принимают первое изображение, указатель поворота на зеркале. Способ может дополнительно содержать этап, на котором определяют, перед этапом, на котором разворачивают зеркало в первое положение, что уровень яркости окружающего света находится ниже предварительно определенной пороговой величины яркости.
[0022] Способ может дополнительно содержать этап, на котором определяют, на основании, по меньшей мере частично, определения, что разность между интенсивностью света указателя поворота на первом изображении и интенсивностью света указателя поворота на втором изображении выше пороговой величины, что зеркало может быть развернуто в каждое из первого и второго положений. Способ может дополнительно содержать этап, на котором определяют, на основании, по меньшей мере частично, определения, что разность между интенсивностью света указателя поворота на первом изображении и интенсивностью света указателя поворота на втором изображении меньше пороговой величины, что зеркало является нерабочим, при этом нерабочее соответствует одному из следующего: (1) застряло в первом положении, (2) застряло во вторых положениях, и (3) застряло между первым и вторым положениями.
[0023] В способе, первое и второе изображения могут быть приняты от датчика, включенного во второе транспортное средство, и способ может дополнительно содержать этапы, на которых: определяют, что второе транспортное средство находится впереди первого транспортного средства, определяют, что интенсивность света указателя поворота выше предварительно определенной пороговой величины на втором изображении, и на основании интенсивности света указателя поворота на втором изображении выше предварительно определенной пороговой величины, определяют, что зеркало застряло в первом положении. В способе, второе транспортное средство может быть обращено к первому транспортному средству.
[0024] Способ может дополнительно содержать этапы, на которых: определяют, что солнце находится позади первого транспортного средства, и определяют рабочее состояние зеркала на основании разности в отраженном свете от солнца между первым изображением и вторым изображением.
[0025] Дополнительно раскрывается компьютер, запрограммированный на исполнение любого из вышеприведенных этапов способа. Еще дополнительно раскрывается транспортное средство, содержащее компьютер. Еще дополнительно раскрывается компьютерный программный продукт, содержащий компьютерно-читаемый носитель информации, хранящий инструкции, исполняемые вычислительным процессором, чтобы исполнять любые из вышеприведенных этапов способа.
[0026] Компьютер запрограммированный, чтобы разворачивать зеркало транспортного средства в первое положение, принимать, от второго транспортного средства, первое изображение, представляющее зеркало, разворачивать зеркало во второе положение, принимать второе изображение, представляющее зеркало; и анализировать первое и второе изображение, чтобы определять рабочее состояние зеркала. Рабочее состояние может быть одним из следующих: зеркало застряло в первом положении, зеркало застряло во втором положении, зеркало застряло между первым и вторым положениями, и зеркало может быть развернуто в каждое из первого и второго положений.
[0027] Компьютер может быть дополнительно запрограммированным, чтобы выводить рабочее состояние на, по меньшей мере, одно из следующего: дисплей и удаленное вычислительное устройство. Компьютер может быть дополнительно запрограммированным, чтобы активировать, перед приемом первого изображения, указатель поворота на зеркале. Компьютер может быть дополнительно запрограммированным, чтобы определять, перед разворотом зеркала в первое положение, что уровень яркости окружающего света находится ниже предварительно определенной пороговой величины яркости. Компьютер может быть дополнительно запрограммированным, чтобы определять, на основании, по меньшей мере частично, определения, что разность между интенсивностью света указателя поворота на первом изображении и интенсивностью света указателя поворота на втором изображении выше пороговой величины, что зеркало может быть развернуто в каждое из первого и второго положений.
[0028] Компьютер может быть дополнительно запрограммированным, чтобы определять, на основании, по меньшей мере частично, определения, что разность между интенсивностью света указателя поворота в первых данных изображения и интенсивностью света указателя поворота во вторых данных изображения меньше пороговой величины, что зеркало является нерабочим, при этом нерабочее соответствует одному из следующего: (1) застряло в первом положении, (2) застряло во вторых положениях, и (3) застряло между первым и вторым положениями.
[0029] Первое и второе изображения могут быть приняты от датчика, включенного во второе транспортное средство, и компьютер может быть дополнительно запрограммированным, чтобы определять, что второе транспортное средство находится впереди первого транспортного средства, определять, что интенсивность света указателя поворота выше предварительно определенной пороговой величины во вторых данных изображения, и на основании интенсивности света указателя поворота во вторых данных изображения выше предварительно определенной пороговой величины, определять, что зеркало застряло в первом положении.
[0030] Компьютер может быть дополнительно запрограммированным, чтобы определять, что солнце находится позади первого транспортного средства, и определять рабочее состояние зеркала на основании разности в отраженном свете от солнца между первым изображением и вторым изображением.
[0031] Фиг. 1 является схемой системы 10 для верификации рабочего состояния боковых зеркал заднего вида на первом транспортном средстве 20 на основании данных изображения от второго транспортного средства 40. Первое транспортное средство 20 и второе транспортное средство 40 коммуникативно связаны через сеть 60. Дополнительно, система 10 может включать в себя сервер 80, коммуникативно связанный с первым и вторым транспортными средствами через сеть 60.
[0032] Как описывается подробно ниже, вычислительное устройство 22 у первого транспортного средства 20 выдает контроллерам 26 инструкцию выдвигать (разворачивать в первое, выдвинутое положение) и убирать (разворачивать во второе убранное положение) правое и левое боковые зеркала 30, 32 заднего вида. Вычислительное устройство 22 принимает соответствующие данные от датчиков, ассоциированных со вторым транспортным средством 40, после того как предоставляются каждая из этих инструкций. На основании данных, вычислительное устройство 22 определяет, являются ли рабочими боковые зеркала заднего вида.
[0033] Как дополнительно описывается ниже, в некоторых случаях, вычислительное устройство 22 может, на основании собранных данных, определять, являются ли рабочими правый и левый указатели 31, 33 поворота, ассоциированные соответственно с правым и левым боковыми зеркалами 30, 32 заднего вида. Правый и левый указатели 31, 33 поворота являются рабочими средствами, в контексте данного раскрытия, в том что они включаются и выключаются на основании соответствующих команд от вычислительного устройства 22. Как описано ниже, в некоторых случаях, управление указателем 31, 33 поворота может быть осуществлено, чтобы он передавал свет непрерывно. В других случаях, управление указателем 31, 33 поворота может быть осуществлено, чтобы он мигал. В целях данного раскрытия, указатель поворота «включен» всякий раз, когда он передает свет. Т.е., в том случае, когда управление указателем 31, 33 поворота осуществляется, чтобы он мигал, указатель 31, 33 поворота считается включенным в целях данного раскрытия, в течение периода времени, когда он передает свет. Примером указателя 31, 33 поворота, который является нерабочим, является указатель 31, 33 поворота с перегоревшей лампой.
[0034] Раскрытие в данном документе относящееся к данным, которые собираются и оцениваются вычислительным устройством 22, включенным в первое транспортное средство 20, не отменяет таких операций на одном или более вторых транспортных средствах 40. Как вычислительное устройство 42 второго транспортного средства 40, так и сервер 80 коммуникативно связаны с вычислительным устройством 22 первого транспортного средства 20 и могут выполнять разнообразные операции, приписываемые в данном документе вычислительному устройству 22. Например, либо сервер 80, либо вычислительное устройство 42 второго транспортного средства 40 может собирать данные, относящиеся к рабочему состоянию боковых зеркал 30, 32 заднего вида или указателей 31, 33 поворота и на основании данных, делать определения, относящиеся к состоянию боковых зеркал 30, 32 заднего вида и/или указателям 31, 33 поворота. В качестве другого примера, либо сервер 80, либо вычислительное устройство 42 второго транспортного средства может собирать данные и делать определения, относящиеся к относительным положениям первого и второго транспортных средств 20, 40.
[0035] Первое транспортное средство 20, как правило, является наземным автономным транспортным средством с тремя или более колесами, например, легковым автомобилем, грузовым автомобилем малой грузоподъемности, и т.д. Первое транспортное средство 20 может работать в автономном и пилотируемом находящимся внутри человеком режиме в соответствии с раскрываемыми реализациями и включает в себя одно или более вычислительные устройства 22. Вычислительное устройство 22 коммуникативно связано с интерфейсом 24 связи, множеством контроллеров 26, и одним или более датчиками 28. Как описано дополнительно подробно ниже, множество контроллеров 26 включает в себя контроллер 26a бокового зеркала заднего вида для контроля разворота боковых зеркал 30, 32 заднего вида и контроллер 26b указателя поворота для включения и выключения указателей 31, 33 поворота.
[0036] Вычислительное устройство 22 включает в себя процессор и память, такие как известные. Кроме того, память включает в себя одну или более формы компьютерно-читаемых носителей информации и хранит инструкции, исполняемые процессором для выполнения разнообразных операций, включая раскрываемые в данном документе. Вычислительное устройство 22 выполняет вычисления для пилотирования транспортного средства 20 во время автономной работы. Например, вычислительное устройство 22 может включать в себя программирование, чтобы управлять, например, через контроллеры 26, одним или более из следующего: тормозами транспортного средства, движением веред (например, управление ускорением в транспортном средстве 20 посредством управления одним или более из следующего: двигателем внутреннего сгорания, электрическим мотором, гибридным двигателем, и т.д.), рулевым управлением, автоматической системой кондиционирования воздуха, внутренними и/или наружными осветительными приборами, и т.д., как впрочем и чтобы определять, должно ли и когда вычислительное устройство 22, в противоположность оператору-человеку, управлять такими операциями.
[0037] Отметим, что несмотря на то, что раскрываемые в данном документе система/способ для определения рабочего состояния боковых зеркал 30, 32 заднего вида и указателей 31, 33 поворота первого транспортного средства 20 хорошо подходят для автономных транспортных средств, система/способ не зависят от автономной, полуавтономной, или ручной работы первого транспортного средства 20.
[0038] Вычислительное устройство 22, как правило, выполнено с возможностью осуществления связи по сети связи транспортного средства, такой как локальная сеть контроллеров (CAN) или подобной; сеть транспортного средства 20 может включать в себя механизм проводной или беспроводной связи, такие как известные, например, Ethernet или другие протоколы связи.
[0039] Через сеть транспортного средства, вычислительное устройство 22 может передавать сообщения разнообразным устройствам в транспортном средстве и/или принимать сообщения от разнообразных устройств, например, контроллеров 26, датчиков 28, и т.д. В качестве альтернативы, или в дополнение, в случаях, где вычислительное устройство 22 фактически содержит несколько устройств, сеть связи транспортного средства может быть использована для связи между устройствами, представленными в качестве вычислительного устройства 22 в данном раскрытии. Кроме того, как упомянуто ниже, разнообразные контроллеры 26 или датчики 28 могут предоставлять данные вычислительному устройству 22 через сеть связи транспортного средства.
[0040] Вычислительное устройство 22 запрограммировано для осуществления связи посредством интерфейса 24 связи со вторым транспортным средством 40 и, в некоторых случаях, с сервером 80, через сеть 60. Интерфейс 24 связи может включать в себя один или более радиочастотные приемопередатчики, чтобы использовать разнообразные проводные и/или беспроводные технологии построения сети, например, сотовую, BLUETOOTH®, специализированную связь на коротких расстояниях (DSRC) и проводные и/или беспроводные пакетные сети.
[0041] Контроллеры 26, как это понятие используется в данном документе, включают в себя вычислительные устройства, которые, как правило, запрограммированы, чтобы управлять особой подсистемой транспортного средства. Контроллер 26 может быть электронным блоком управления (ECU), таким, который известен, возможно включая дополнительное программирование, как описано в данном документе. Контроллеры 26 могут быть коммуникативно связаны с и принимать инструкции от вычислительного устройства 22, чтобы приводить в действие подсистему в соответствии с инструкциями. Например, контроллер 26 тормозов может принимать инструкции от вычислительного устройства 22, чтобы управлять тормозами транспортного средства 20.
[0042] Множество контроллеров 26 для транспортного средства 20 может включать в себя известные электронные блоки управления (ECU) или подобные, включая, в качестве не ограничивающих примеров, один или более контроллеры силовой передачи, один или более контроллеры тормозов и один или более контроллеры рулевого управления. Каждый из контроллеров может включать в себя соответствующие процессоры и памяти и один или более исполнительные механизмы. Контроллеры могут быть запрограммированы и соединены шиной связи транспортного средства 20, такой как шина локальной сети контроллеров (CAN) или шина локальной сети межсоединений (LIN), чтобы принимать инструкции от вычислительного устройства 22 и управлять исполнительными механизмами на основании инструкций.
[0043] В частности, транспортное средство 20 включает в себя контроллер 26a зеркала и контроллер 26b указателя поворота. Контроллер 26a зеркала включает в себя вычислительное устройство и один или более исполнительные механизмы, такие как мотор или соленоид, и запрограммирован, чтобы принимать инструкции от вычислительного устройства 22, чтобы управлять разворотом правого и левого боковых зеркал 30, 32 заднего вида на основании инструкций.
[0044] Контроллер 26b указателя поворота включает в себя вычислительное устройство и одно или более устройства переключения света, такие как силовой транзистор или реле, и запрограммирован, чтобы принимать инструкции от вычислительного устройства 22, чтобы включать и выключать правый и левый указатели 31, 33 поворота. Контроллер 26b указателя поворота, чтобы способствовать верификации одного или обоих из правого и левого боковых зеркал 30, 32 заднего вида, может непрерывно включать правый и левый указатели 31, 33 поворота, т.е., таким образом, что они не мигают. В качестве альтернативы, контроллер 26b указателя поворота может управлять указателями 31, 33 поворота таким образом, что они мигают с частотой мигания, например, один Герц.
[0045] Дополнительно, в некоторых случаях, контроллер 26b указателя поворота может включать в себя средство диагностики, чтобы определять работоспособность указателя 31, 33 поворота. В таких случаях, контроллер 26b указателя поворота может принимать инструкции от вычислительного устройства 22, чтобы осуществлять диагностику указателя 31, 33 поворота. Контроллер 26b указателя поворота может осуществлять диагностику указателя 31, 33 поворота и предоставлять результат, например, лампа указателя поворота является рабочей, или лампа указателя поворота перегорела, вычислительному устройству 22.
[0046] Датчики 28 могут включать в себя многообразие устройств, известных для предоставления данных через шину связи транспортного средства. Датчики 28 могут быть запрограммированы, чтобы собирать данные, относящиеся к транспортному средству 20 и среде, в которой работает транспортное средство 20. В качестве примера, а не ограничения, датчики 28 могут включать в себя, например, камеры, LiDAR, радар, ультразвуковые датчики, инфракрасные датчики, датчики давления, акселерометры, гироскопы, датчики температуры, датчик давления, датчики Холла, оптические датчики, датчики напряжения, датчики тока, механические датчики, такие как переключатели, и т.д. Датчики 28 могут быть использованы, чтобы регистрировать среду, в которой работает транспортное средство 20, такую как погодные условия, класс дороги, местоположение дороги, и т.д.
[0047] В частности, датчики 28 могут предоставлять данные, чтобы определять местоположение одного или более вторых транспортных средств 40 вблизи первого транспортного средства 20. Близость к первому транспортному средству 20 определяется здесь в пределах диапазона, в котором датчики 48 на втором транспортном средстве 40 могут собирать данные изображения боковых зеркал 30, 32 заднего вида первого транспортного средства 20 так, что определения могут быть выполнены в отношении работоспособности боковых зеркал 30, 32 заднего вида и/или указателей 31, 33 поворота, ассоциированных с боковыми зеркалами 30,32 заднего вида.
[0048] Транспортное средство 40 также, как правило, является наземным автономным транспортным средством, например, мотоциклом, легковым автомобилем, грузовым автомобилем малой грузоподъемности, и т.д. Транспортное средство 40 включает в себя вычислительное устройство 42, сходное с вычислительным устройством 22 для транспортного средства 20. Вычислительное устройство 42 включает в себя процессор и память, такие как известные. Кроме того, память включает в себя одну или более формы компьютерно-читаемых носителей информации, и хранит инструкции, исполняемые процессором для выполнения разнообразных операций, включая раскрываемые в данном документе.
[0049] Вычислительное устройство 42 коммуникативно связано с интерфейсом 44 связи, множеством контроллеров 46, и одним или более датчиками 48. Интерфейс 44 связи, множество контроллеров 46 и датчики 48 могут быть сходными с соответствующим интерфейсом 24 связи, множеством контроллеров 26 и датчиками 28, включенным в транспортное средство 20.
[0050] Вычислительное устройство 42 запрограммировано, чтобы принимать запросы от других вычислительных устройств, таких как вычислительное устройство 22, и на основании запросов, собирать данные изображения, т.е., одно или более изображения, через датчики 48, ассоциированные со вторым транспортным средством 40. Вычислительное устройство 42 может дополнительно быть запрограммировано, чтобы передавать данные изображения вычислительному устройству 22 или серверу 80. Дополнительно, вычислительное устройство 42 может быть запрограммировано, чтобы оценивать данные изображения в отношении рабочего состояния боковых зеркал 30, 32 заднего вида и указателей 31, 33 поворота, ассоциированных с первым транспортным средством 20. Определение рабочего состояния указателей 31, 33 поворота включает в себя определение, включены или выключены указатели 31, 33 поворота. Как отмечено выше, в некоторых случаях управление указателями 31, 33 поворота может быть осуществлено, чтобы они мигали. В таких случаях, вычислительному устройству 42 требуется осуществлять мониторинг указателей 31, 33 поворота в течение предварительно определенного периода времени, например, двух секунд, чтобы определять, имеет ли указатель 31, 33 поворота периоды, в течение которых он включен, т.е., передает свет. Вычислительное устройство 42 может принимать сообщение, например, от вычислительного устройства 22, что управление указателем 31, 33 поворота осуществляется так, чтобы он моргал. В других случаях, вычислительное устройство 42 может не «знать» о том, осуществляется ли управление указателем 31, 33 поворота, чтобы он моргал или был непрерывно включен, и может осуществлять мониторинг указателя 31, 33 поворота в течение предварительно определенного периода времени, чтобы убедиться в том, что в случае, когда указатель 31, 33 поворота моргает, вычислительное устройство 42 захватывает «включенный» период.
[0051] Вычислительное устройство 42 может, например, захватывать изображения каждые 0.25 секунды в течение периода в две секунды, и определять, имеет ли указатель 31, 33 поворота первую интенсивность света на одном или более изображениях, которая выше второй интенсивности света на одном или более других изображениях, но выше чем пороговая величина разности. В случае, когда вычислительное устройство 42 определяет, что указатель 31, 33 поворота мигает, вычислительное устройство 42 захватывает изображение указателя 31, 33 поворота с первой (более высокой) интенсивностью света (указывающей, что указатель 31, 33 поворота передает свет) для вычислительного устройства 22 или сервера 80, для использования при определении рабочего состояния зеркал 30, 32.
[0052] Один или более датчики 48 включают в себя цифровую камеру или другое оптическое устройство формирования изображения, которое может принимать изображения и генерировать данные изображения, представляющие изображения. Собранные данные изображения находятся, как правило, в цифровом формате, включающем одно или более изображения, так что каждое включает в себя пиксели при различных цветах и интенсивностях, как известно.
[0053] Сеть 60 представляет собой один или более механизмы, посредством которых первое транспортное средство 20, второе транспортное средство 40 и сервер 80 могут осуществлять связь друг с другом, и может быть одним или более из разнообразных механизмов проводной или беспроводной связи, включая любое требуемое сочетание проводных (например, кабельных и оптоволоконных) и/или беспроводных (например, сотовых, беспроводных, спутниковых, микроволновых и радиочастотных) механизмов связи и любую требуемую топологию сети (или топологии, когда используется несколько механизмов связи). Связь может быть связью типа «точка-с-точкой», такой как связь типа «транспортное средство-с-транспортным средством» (V2V) или «транспортное средство-с-инфраструктурой» (V2I) (собирательно V2X), или связью через промежуточные устройства, такие как спутники связи, станции-ретрансляторы связи, и т.д. Примерные сети связи включают в себя сети проводной связи, локальные сети (LAN) и/или глобальные сети (WAN), включая Интернет, предоставляющий услуги связи для передачи данных.
[0054] Сервер 80 может быть одним или более компьютерными серверами, каждый, как правило, включающий в себя, по меньшей мере, один процессор и, по меньшей мере, одну память, при этом память хранящую инструкции, исполняемые процессором, включая инструкции для выполнения разнообразных этапов и процессов, описываемых в данном документе. Сервер 80 может включать в себя или быть коммуникативно связан с хранилищем данных для хранения собранных данных. Сервер 80 иногда описывается как «удаленный», означая то, что он является внешним по отношению к транспортным средствам 20, 40 и требует беспроводной связи, чтобы осуществлять связь с вычислительными устройствами 22, 42.
[0055] Сервер 80 может быть запрограммирован, чтобы собирать данные и делать определения, относящиеся к положению (абсолютному и относительному) первого и второго транспортных средств 20, 40, рабочих состояний боковых зеркал 30, 32 заднего вида, и указателей 31, 33 поворота.
[0056] Фигура 2A и 2B показывают, соответственно, примерное правое боковое зеркало 30 заднего вида и примерное левое боковое зеркало 32 заднего вида.
[0057] Правое боковое зеркало 30 заднего вида включает в себя примерный указатель 31 поворота. Фигура 2A показывает правое боковое зеркало 30 заднего вида в первом, выдвинутом положении по отношению к первому транспортному средству 20. Указатель 31 поворота выполнен на первой стороне 34 правого бокового зеркала 30 заднего вида таким образом, что указатель 31 поворота обращен вперед, т.е., в том же самом направлении, что и передняя часть 21 (Фигура 3A) у транспортного средства 20 с зеркалом 30 в первом положении.
[0058] Сходным образом, левое боковое зеркало 32 заднего вида включает в себя примерный указатель 33 поворота. Как показано на фигуре 2B, указатель 33 поворота выполнен на первой стороне 35 левого бокового зеркала 32 заднего вида таким образом, что указатель 33 поворота обращен вперед, т.е., в том же самом направлении, что и передняя часть 21 у транспортного средства 20 с зеркалом 32 в первом, выдвинутом положении.
[0059] Как обсуждается подробно ниже, и иллюстрируется на Фигурах 3A, 3B, 4A и 4B, вычислительное устройство 22 может, в некоторых случаях, верифицировать работу правого и левого боковых зеркал 30, 32 заднего вида ночью посредством определения видимости указателей 31, 33 поворота у правого и левого боковых зеркал 30, 32 заднего вида применительно к каждому из первого и второго положений зеркала. Понятие «ночью» определяется в целях данного раскрытия как условие окружающего света достаточно темное так, что вычислительное устройство 22 может установить различие между указателем 31, 33 поворота, который включен, и указателем поворота, который выключен, на основании изображения, захваченного датчиком 48. Установление различия в данном контексте означает наличие различия в интенсивности света между включенным состоянием и выключенным состоянием, которое больше предварительно определенной пороговой величины, при этом предварительно определенная пороговая величина может зависеть от условия окружающего света. В конкретной системе, условие «ночью» может быть определено в качестве условия окружающего света ниже предварительно определенной пороговой величины яркости. «Ночью» также может именоваться в данном документе как «в темное время суток».
[0060] Определение видимости указателей 31, 33 поворота может быть выполнено, например, на основании данных изображения, захваченных датчиками 48 на втором транспортном средстве 40 позади первого транспортного средства 20, как показано на фигурах 3A и 3B. В качестве альтернативы, это может быть выполнено на основании данных изображения, захваченных датчиками 48 на втором транспортном средстве 40 впереди первого транспортного средства 20, как показано на Фигурах 4A и 4B.
[0061] Фигура 3A является видом сверху первого транспортного средства 20 впереди второго транспортного средства 40. Первое транспортное средство 20 включает в себя правое и левое боковые зеркала 30, 32 заднего вида, развернутые в первое положение. Второе транспортное средство 40 включает в себя датчик 48, который может быть, например, камерой, или другим устройством захвата изображения.
[0062] Указатели 31, 33 поворота смонтированы на или в правом и левом боковых зеркалах 30, 32 заднего вида таким образом, что они могут быть обнаружены с передней части 21 транспортного средства, а не с задней части 23 транспортного средства 20. Соответственно, изображение, захваченное датчиком 48 правого и левого боковых зеркал 30, 32 заднего вида и первое выдвинутое положение, как показано на фигуре 3A, не будет включать в себя указатели 31, 33 поворота.
[0063] Фигура 3B является видом сверху первого транспортного средства 20 впереди второго транспортного средства 40 в тех же самых положениях, как на Фигуре 3A. Тем не менее, на Фигуре 3B, правое и левое боковые зеркала 30, 32 заднего вида развернуты во втором, убранном положении. В данном втором убранном положении, по меньшей мере, часть каждого из указателей 31, 33 поворота может быть обнаружена из положения позади первого транспортного средства 20. Соответственно, изображение, захваченное датчиком 48 правого и левого боковых зеркал 30, 32 заднего вида во втором, убранном положении будет включать в себя, по меньшей мере, часть указателей 31, 33 поворота.
[0064] Фигура 4A является видом сверху первого транспортного средства 20 позади второго транспортного средства 40. На Фигуре 4A, боковые зеркала 30, 32 заднего вида вновь находятся в первом, выдвинутом положении. Второе транспортное средство 40 включает в себя датчик 48, такой как камера или другое устройство захвата изображения, обращенное к задней части транспортного средства 40 таким образом, что он может захватывать изображения перового транспортного средства 20 позади второго транспортного средства 40.
[0065] В данной конфигурации, изображение правого и левого боковых зеркал 30, 32 заднего вида, захваченное датчиком 48, будет включать в себя указатели 31, 33 поворота.
[0066] Фигура 4B является видом сверху первого транспортного средства 20 позади второго транспортного средства 40. На фигуре 4B, боковые зеркала 30, 32 заднего вида находятся во втором, убранном положении. В данной ситуации, указатели 31, 33 поворота не могут быть обнаружены спереди первого транспортного средства 20. Соответственно, изображение, захваченное датчиком 48 правого и левого боковых зеркал 30, 32 заднего вида не будет включать в себя указатели 31, 33 поворота.
[0067] Другие относительные местоположения и/или перемещения первого транспортного средства 20 и второго транспортного средства 40 также могут обеспечивать определение работоспособности боковых зеркал 30, 32 заднего вида. Например, первое и второе транспортные средства 20, 40 могут быть движущимися в противоположных направлениях, или остановленными в противоположных направлениях на перекрестке. Датчик 48 на втором транспортном средстве 40 может быть выполнен обращенным к транспортному средству 20 таким образом, что могут быть захвачены изображения боковых зеркал 30, 32 заднего вида в каждом из первого, выдвинутого и второго, убранного положений.
[0068] Кроме того, как обсуждается подробно ниже, и иллюстрируется на Фигуре 5, система 10 может, в некоторых случаях, верифицировать работу правого и левого боковых зеркал 30, 32 заднего вида при дневном свете посредством обнаружения солнца, отражаемого в зеркалах 30, 32 в первом, выдвинутом положении, и определения того, что отраженное солнце не может быть обнаружено в правом и левом боковых зеркалах 30, 32 заднего вида во втором, убранном положении.
[0069] Как показано на Фигуре 5, когда правое и левое боковые зеркала 30, 32 заднего вида первого транспортного средство 20 находятся в первом, выдвинутом положении, и солнце находится в положении позади первого транспортного средства 20, прямой солнечный свет 56 может быть отражен от одного или обоих боковых зеркал 30, 32 заднего вида. Прямой солнечный свет 56 может быть отражен в направлении таком, что датчик 48 второго транспортного средства 40 может захватить первое изображение, включающее в себя отраженный солнечный свет. Когда, первое транспортное средство 20 помещает правое и левое боковые зеркала заднего вида во второе, убранное положение, второе изображение, захваченное датчиком 48 второго транспортного средства 40, более не будет включать в себя отраженный солнечный свет. На основании сравнения первого и второго изображений, вычислительное устройство 22 может определять работоспособность правого и/или левого боковых зеркал 30, 32 заднего вида.
[0070] Фигура 6 является схемой примерного процесса 600, чтобы определять рабочее состояние боковых зеркал 30, 32 заднего вида для первого транспортного средства 20. Процесс 600 начинается в блоке 602.
[0071] В блоке 602, вычислительное устройство 22 определяет, произошло ли инициирующее событие верификации зеркала. Инициирующее событие верификации зеркала определяется в целях данного раскрытия как состояние первого транспортного средства 20, которое обеспечивает определение рабочего состояния бокового зеркала 30, 32 заднего вида, такой как остановившееся на красный свет, застрявшее в пробке, или припаркованное на парковочном месте.
[0072] - Например, вычислительное устройство 22 может быть запрограммировано, чтобы определять рабочее состояние боковых зеркал 30, 32 заднего вида после каждого включения зажигания первого транспортного средства 20. Вычислительное устройство 22 может определять, что произошло инициирующее событие верификации зеркала, когда первое транспортное средство 20 останавливается на красный свет после включения зажигания первого транспортного средства 20. В случае, когда верификация зеркала не завершена в первый раз, когда транспортное средство 20 останавливается, вычислительное устройство 22 может определять, что произошло другое инициирующее событие верификации зеркала, когда первое транспортное средство останавливается на следующий красный свет.
[0073] Инициирующее событие может в качестве альтернативы или в дополнение включать в себя указание того, что подошел или прошел срок верификации бокового зеркала заднего вида. В качестве другого примера, вычислительное устройство 22 может быть запрограммировано на проведение верификации зеркала раз в месяц. По прошествии месяца с последней верификации зеркала, вычислительное устройство 22 может продолжать попытку верификации зеркала всякий раз, когда первое транспортное средство 20 имеет состояние, которое обеспечивает верификацию боковых зеркал 30, 32 заднего вида до тех пор, пока вычислительное устройство 22 успешно не завершает процесс 600 верификации зеркала.
[0074] После определения того, что произошло инициирующее событие верификации зеркала, процесс 600 продолжается в блоке 604. В случае, когда вычислительное устройство 22 определяет, что не произошло инициирующее событие верификации зеркала, процесс 600 продолжается в блоке 602.
[0075] В блоке 604, вычислительное устройство 22 собирает данные, касательно среды первого транспортного средства 20. Собранные данные могут включать в себя время суток, текущий уровень окружающего света, доступность второго транспортного средства 40 впереди или позади первого транспортного средства 20, присутствие и направление солнечного света, указания того, насколько долго первое транспортное средство 20 будет оставаться в состоянии, которое обеспечивает верификацию зеркала. После сбора данных, касательно среды первого транспортного средства 20, процесс 600 продолжается в блоке 606.
[0076] В блоке 606, процесс 600 определяет, имеет ли место темное время суток. Темное время суток относится к условию окружающего света достаточно темного, так что вычислительное устройство 22 может установить различие между указателем поворота, который включен, и указателем поворота, который выключен, на основании изображения, захваченного датчиком 48. Например, вычислительное устройство 22 может определять, что достаточно темно для выполнения верификации зеркала, когда окружающий свет ниже предварительно определенной пороговой величины яркости. Дополнительно или в качестве альтернативы, компьютерное устройство 22 может определять, что достаточно темно, чтобы проводить верификацию зеркала в темное время суток на основании времени суток, календарной даты, и местоположения первого транспортного средства 20. Например, вычислительное устройство 22 может, на основании таблиц, указывающих время заката на основании местоположения и календарной даты, определять, что достаточно темно в 17:30 30 января в Детройте, штат Мичиган, чтобы обнаруживать указатели 31, 33 поворота.
[0077] В случае, когда вычислительное устройство 22 определяет, что имеет место темное время суток, процесс 600 продолжается в блоке 608. В случае, когда вычислительное устройство 22 определяет, что не имеет место темное время суток, процесс 600 продолжается в блоке 514. «Не темное время суток» также может именоваться в данном документе «светлым временем суток».
[0078] В блоке 608, процесс 600 определяет доступность второго транспортного средства 40 для выполнения верификации бокового зеркала заднего вида. Вычислительное устройство 22 может определять, что второе транспортное средство 40 является доступным для проведения верификации бокового зеркала заднего вида в случае, когда второе транспортное средство 40 остановилось вблизи первого транспортного средства 20, т.е., в диапазоне перед первым транспортным средством 20 или позади первого транспортного средства 20 в положении, где датчики 48 на втором транспортном средстве 40 могут захватывать изображения боковых зеркал 30, 32 заднего вида.
[0079] Например, вычислительное устройство 22 может определять, что второе транспортное средство 40 является доступным, когда транспортное средство 40 останавливается непосредственно впереди или непосредственно позади первого транспортного средства 20 в той же полосе движения, и на менее чем предварительно определенном расстоянии от первого транспортного средства 20. Предварительно определенное расстояние может быть, например, фиксированной величиной, такой как 50 метров. В качестве другого примера, вычислительное устройство 22 может определять, что второе транспортное средство 40 является доступным в случае, когда оно остановилось в противоположной полосе движения в положении обращенном к первому транспортному средству 20 так, что датчики 48 на втором транспортном средстве 40 способны обнаружить боковые зеркала заднего вида первого транспортного средства 20.
[0080] В случае, когда вычислительное устройство 22 определяет, что второе транспортное средство 40 является доступным, процесс 600 продолжается в блоке 610. В случае, когда вычислительное устройство 22 определяет, что второе транспортное средство 40 не является доступным, процесс 600 продолжается в блоке 602.
[0081] В блоке 610, процесс 600 определяет, согласно ли второе транспортное средство 40 выполнить верификацию зеркала. Например, вычислительное устройство 22 может передавать сообщение вычислительному устройству 42, ассоциированному со вторым транспортным средством 40, запрашивающее у вычислительного устройства 42 участие в верификации зеркала.
[0082] Вычислительное устройство 42 может оценивать некоторые критерии, чтобы определять, участвовать ли в верификации зеркала. Второе транспортное средство 40 может исходно оценивать, будет ли второе транспортное средство 40 оставаться в рамках диапазона первого транспортного средства 20, чтобы обнаруживать зеркало в течение предварительно определенного периода времени. Предварительно определенным периодом времени может быть период, достаточно продолжительный, чтобы выполнять верификацию зеркала.
[0083] Например, в случае, когда первое транспортное средство 20 и второе транспортное средство 40 движутся рядом друг с другом в колонне, и транспортное средство 40 не намерено покидать колонну предварительно определенный период времени, вычислительное устройство 42 второго транспортного средства 40 может определять, что первое и второе транспортные средства 20, 40 будут находиться в диапазоне, чтобы обеспечивать верификацию зеркала, более длительное время, чем предварительно определенный период времени, и что выполнение верификации зеркала возможно. Вычислительное устройство 42 может соглашаться на выполнение верификации зеркала.
[0084] В другом примере, транспортное средство 40 может определять, что транспортное средство 40 покидает колонну менее чем через предварительно определенный период времени, или что что колонна движется по изогнутым дорогам, которые не обеспечивают верификацию зеркала, и отклоняет запрос на участие в верификации зеркала. В качестве другого примера, вычислительное устройство 42 второго транспортного средства 40 может определять, что условия окружающего света не обеспечивают исполнения верификации зеркала. Например, окружающий свет может быть слишком ярким, из-за солнца или света от других транспортных средств и/или инфраструктуры (например, уличное освещение), чтобы исполнять верификацию зеркала.
[0085] В качестве другого примера, второе транспортное средство 40 может запрашивать, чтобы первое транспортное средство 20 участвовало в верификации зеркала для зеркала на втором транспортном средстве 40. В некоторых случаях, вычислительное устройство 42 может соглашаться на верификацию зеркала только в случае, когда вычислительное устройство 22 первого транспортного средства 20 согласно на взаимный обмен.
[0086] Дополнительно, вычислительное устройство 42 может оценивать другие критерии, такие как погодные условия, скорость движения, доступность датчиков 48 для выполнения верификации зеркала, местоположение зеркал 30, 32 на первом транспортном средстве 20 по отношению к местоположению датчиков 48 во втором местоположении, и т.д., для того, чтобы определять, будет ли вычислительное устройство 42 второго транспортного средства 40 участвовать в верификации зеркала.
[0087] В случае, когда вычислительное устройство 42 согласно, процесс продолжается в блоке 612. В случае, когда вычислительное устройство 42 несогласно, процесс возвращается к блоку 602. Применительно к вычислительному устройству 42 «согласиться» означает, что вычислительное устройство 42 отвечает на запрос сообщением, указывающим, что транспортное средство 40 будет участвовать в верификации зеркала.
[0088] В блоке 612, процесс 600 определяет рабочее состояние боковых зеркал 30, 32 заднего вида на основании видимости соответствующих указателей 31, 33 поворота и положения второго транспортного средства 40 в соответствии с суб-процессом 700, как описывается ниже. По завершению суб-процесса 700, процесс 600 продолжается в блоке 614.
[0089] В блоке 614, который может следовать за блоком 612 или блоком 622, процесс 600 представляет отчет о и сохраняет рабочее состояние боковых зеркал 30, 32 заднего вида. В случае, когда вычислительное устройство 22 определяет, что одно или оба из боковых зеркал 30, 32 заднего вида являются рабочими, вычислительное устройство 22 может сохранять данный результат, вместе с отметкой времени/даты в локальной памяти, и может выводить данные на сервер 80 для сохранения. В случае, когда вычислительное устройство 22 определяет, что одно или оба из боковых зеркал 30, 32 заднего вида является нерабочим (застряло в одном из первого или второго положений, или между первым и вторым положениями), вычислительное устройство 22 также может сохранять результат в локальной памяти и выводить результат на сервер 80. Дополнительно или в качестве альтернативы, вычислительное устройство 22 может выводить пользователю первого транспортного средства 20 через, например, устройство отображения на первом транспортном средстве 20, или текст на мобильный телефон пользователя первого транспортного средства 20, и т.д., сообщение, указывающее рабочее состояние боковых зеркал 30, 32 заднего вида. После вывода и сохранения состояния боковых зеркал 30, 32 заднего вида, процесс 600 заканчивается.
[0090] В блоке 616, который может следовать из блока 606, процесс 600 определяет, находится ли солнце в положении позади первого транспортного средства 20. Позади первого транспортного средства 20 может включать в себя положения непосредственно позади первого транспортного средства 20 (т.е., на задней стороне 23 первого транспортного средства 20 в положении вдоль оси, проходящей непосредственно через середину первого транспортного средства, или в рамках предварительно определенного диапазона углов, например +/- пять градусов, от оси, проходящей через первое транспортное средство 20.
[0091] После определения того, что солнце находится позади первого транспортного средства 20, процесс 600 продолжается в блоке 618. В случае, когда компьютерное устройство 22 определяет, что солнце не находится позади первого транспортного средства 20, процесс продолжается в блоке 602.
[0092] В блоке 618, процесс 600 определяет доступность второго транспортного средства 20 позади первого транспортного средства 20. Например, вычислительное устройство 22 может определять, присутствует ли второе транспортное средство 40, остановившееся в той же самой полосе, что и первое транспортное средство и позади первого транспортного средства 20 в рамках диапазона в 50 метров или другого предварительно определенного расстояния. После определения того, что второе транспортное средство 40 является доступным позади первого транспортного средства, процесс 600 продолжается в блоке 620.
[0093] В блоке 620, процесс 600 определяет, согласно ли второе транспортное средство 40 на выполнение верификации зеркала, как описано выше со ссылкой на блок 610. В случае, когда вычислительное устройство 42 согласно, процесс продолжается в блоке 622. В случае, когда вычислительное устройство 42 несогласно, процесс возвращается в блок 602.
[0094] В блоке 622, процесс 600 верифицирует работу боковых зеркал 30, 32 заднего вида на основании видимости отраженного солнечного света в соответствии с суб-процессом 800, как описывается ниже. После завершения суб-процесса 800, процесс 600 продолжается в блоке 614. Как описано выше, в блоке 614, вычислительное устройство сохраняет и/или выводит состояние одного или обоих боковых зеркал 30, 32 заднего вида. После выполнения блока 614, процесс 600 заканчивается.
[0095] Фигура 7 является схемой примерного суб-процесса 700, чтобы определять рабочее состояние одного или более боковых зеркал 30, 32 заднего вида у первого транспортного средства 20 во время работы в темное время суток. Суб-процесс 700 вызывается блоком 612 в процессе 600 и начинается в блоке 702.
[0096] В блоке 702, суб-процесс 700 определяет местоположение второго транспортного средства 40 по отношению к первому транспортному средству 20, т.е., находится ли второе транспортное средство 40 впереди или позади первого транспортного средства 20. После определения, посредством вычислительного устройства 22, находится ли второе транспортное средство 40 впереди или позади первого транспортного средства 20, суб-процесс 700 продолжается в блоке 704.
[0097] В блоке 704, вычислительное устройство 22 первого транспортного средства 20 разворачивает, например, правое боковое зеркало 30 заднего вида в первое, выдвинутое положение. После разворота правого бокового зеркала 30 заднего вила в первое выдвинутое положение, процесс 700 продолжается в блоке 706.
[0098] В блоке 706, вычислительное устройство 22 активирует указатель 31 поворота, ассоциированный с правым боковым зеркалом 30 заднего вида. Дополнительно, в транспортном средстве 20 с возможностью диагностики указателя поворота, вычислительное устройство 22 может определять, например, через контроллер 26b указателя поворота, является ли указатель 31 поворота рабочим. После активации указателя 31 поворота, процесс 700 продолжается в блоке 708.
[0099] В блоке 708, вычислительное устройство 42, ассоциированное со вторым транспортным средством 40, захватывает первое изображение правого бокового зеркала 30 заднего вида. Это может быть инициировано посредством запроса от вычислительного устройства 22 к вычислительному устройству 42 на захват первого изображения.
[0100] После приема запроса, вычислительное устройство 42 второго транспортного средства 40 может регулировать направление датчика 48, чтобы центрировать зеркало 30, 32 в первом изображении. Например, в случае, когда второе транспортное средство 40 находится позади первого транспортного средства 20, второе транспортное средство 40 может регулировать горизонтальное направление датчика 48 на правую сторону первого транспортного средства 20, и дополнительно регулировать угол возвышения датчика таким образом, что зеркало 30 появляется, по существу, в середине первого изображения. Кроме того, вычислительное устройство 42 может регулировать фокусное расстояние датчика 48 таким образом, что зеркало 30 занимает процент первого изображения в рамках предварительно определенного диапазона, например, в диапазоне от 20% до 80%. В некоторых случаях, горизонтальный угол датчика относительно второго транспортного средства 40, т.е., угол датчика 48 относительно оси, проходящей через первое транспортное средство от задней части к передней, может быть фиксированным. В этих случаях, транспортное средство может регулировать угол второго транспортного средства 40 относительно первого транспортного средства 20.
[0101] После регулировки угла, фокусного расстояния, и т.д. датчика 48, вычислительное устройство 42 собирает, через датчик 48, ассоциированный со вторым транспортным средством 40, одно или более первые изображения правого бокового зеркала 30 заднего вида на первом транспортном средстве 20. В случае, когда второе транспортное средство 40 находится позади первого транспортного средства 20, как показано, например, на фигуре 3A, и в случае, когда это правое боковое зеркало 30 заднего вида правильно развернуто в первое положение, первое изображение не будет включать в себя указатель 31 поворота. С другой стороны, в случае, когда второе транспортное средство 40 находится впереди первого транспортного средства 20, как показано на фигуре 4A, первое изображение будет включать в себя указатель 31 поворота. Как описано выше, исходно, вычислительное устройство 42 может определять, мигает ли указатель 31 поворота в зеркале 30. В случае, когда указатель 31 поворота мигает, вычислительное устройство 42 захватывает первое изображение в течение «включенного» периода указателя 31 поворота. После захвата первого изображения, суб-процесс 700 продолжается в блоке 710.
[0102] В блоке 710, вычислительное устройство 42, ассоциированное со вторым транспортным средством 40, может передавать первые данные изображения, представляющие собой первое изображение, вычислительному устройству 22, ассоциированному с первым транспортным средством 20. Дополнительно или в качестве альтернативы, вычислительное устройство 42 может передавать первые данные изображения серверу 80, или сохранять данные в памяти, ассоциированной с вычислительным устройством 42. После переноса и/или сохранения первых данных изображения, процесс 700 продолжается в блоке 712.
[0103] В блоке 712, вычислительное устройство 22 передает команду контроллеру 26a зеркала, выдающую инструкцию контроллеру 26a зеркала развернуть правое боковое зеркало 30 заднего вида во второе, убранное положение. Процесс 700 затем продолжается в блоке 714.
[0104] В блоке 714, вычислительное устройство 42, ассоциированное со вторым транспортным средством 40, захватывает изображение правого бокового зеркала 30 заднего вида. Это может быть инициировано посредством запроса от вычислительного устройства 22 к вычислительному устройству 42 на захват второго изображения.
[0105] После приема запроса, вычислительное устройство 42 второго транспортного средства 40 может центрировать зеркало 30 во втором изображении посредством регулировки угла, фокусного расстояния, и т.д. датчика 48, как описано в отношении блока 708. Вычислительное устройство 42 затем собирает, через датчик 48, ассоциированный со вторым транспортным средством 40, одно или более вторые изображения правого бокового зеркала 30 заднего вида на первом транспортном средстве 20. В случае, когда второе транспортное средство 40 находится позади первого транспортного средства 20, как показано, например, на фигуре 3B, и в случае, когда правое боковое зеркало 30 заднего вида правильно развернуто во второе положение, второе изображение будет включать в себя указатель 31 поворота. Вычислительное устройство 42 может определять, мигает ли указатель 31 поворота на зеркале 30. В случае, когда указатель 31 поворота мигает, вычислительное устройство захватывает второе изображение в течение «включенного» периода указателя 31 поворота. С другой стороны, в случае, когда второе транспортное средство 40 находится впереди первого транспортного средства 20, как показано на Фиг. 4B, первое изображение не будет включать в себя указатель 31 поворота. После захвата второго изображения, процесс продолжается в блоке 716.
[0106] В блоке 716, вычислительное устройство 42 передает вторые данные изображения, представляющие собой второе изображение, вычислительному устройству 22, ассоциированному с первым транспортным средством 20. Дополнительно или в качестве альтернативы, вычислительное устройство 42 может передавать вторые данные изображения серверу 80, или сохранять данные в памяти, ассоциированной с вычислительным устройством 42. После переноса и/или сохранения вторых данных изображения, суб-процесс 700 продолжается в блоке 718.
[0107] В блоке 718, вычислительное устройство 22 определяет состояние правого бокового зеркала 30 заднего вида на основании первых и вторых данных изображения. Состояние правого бокового зеркала заднего вида может быть, например, определено на основании поисковой таблицы, такой как иллюстрируемая в Таблице 1, ниже.
|
Таблица 1
[0108] «Указатель поворота виден», используемое в данном документе, определяется как то, что интенсивность света выше предварительно определенной пороговой величины.
[0109] Другие алгоритмы могут быть использованы для определения того, что боковое зеркало заднего вида является рабочим. Например, вычислительное устройство может определять, что разность интенсивности света указателя поворота между первыми данными изображения и вторыми данными изображения больше предварительно определенной пороговой величины. Достаточная разность интенсивности света между первыми и вторыми данными изображения является указанием того, что боковое зеркало 30 заднего вида переместилось из первого положение во второе положение, как ожидалось.
[0110] В качестве другого примера, на основании положения второго транспортного средства относительно первого транспортного средства, вычислительное устройство 22 может быть запрограммировано с идентификацией одних из первых или вторых данных изображения, как включающих в себя прямой свет от указателя 31, 33 поворота. Например, в случае, когда второе транспортное средство 40 находится позади первого транспортного средства 20, вычислительное устройство 22 может быть запрограммировано, чтобы определять, что свет от указателя 31, 33 поворота ожидается во вторых данных изображения, но не в первых данных изображения. Затем, на основании определения того, что интенсивность света от указателя 31, 33 поворота выше во вторых данных изображения, чем в первых данных изображения, вычислительное устройство 22 может определять, что ассоциированное зеркало 30, 32 является рабочим.
[0111] После определения рабочего состояния правого бокового зеркала 30 заднего вида, суб-процесс 700 продолжается в блоке 720.
[0112] В блоке 720, вычислительное устройство 22 определяет, что присутствует другое зеркало для верификации. В случае, когда работа левого бокового зеркала 32 заднего вида еще не была верифицирована, суб-процесс 700 продолжается в блоке 704. Суб-процесс 700 затем повторяет блоки с 704 по 718 для левого бокового зеркала 32 заднего вида и ассоциированного указателя 33 поворота. В случае, когда работа обоих из правого и левого боковых зеркал 30, 32 заднего вида была верифицирована, суб-процесс 700 заканчивается.
[0113] Суб-процесс 700 описывает вычислительное устройство 22, определяющее рабочее состояние бокового зеркала 30 заднего вида. Тем не менее, эти операции также могут быть выполнены вычислительным устройством 42 во втором транспортном средстве 40 или сервером 80.
[0114] После окончания суб-процесса 700, примерный процесс 600, который вызывал примерный суб-процесс 700, продолжается в блоке 614.
[0115] Фигура 8 является схемой примерного суб-процесса 800, чтобы определять рабочее состояние бокового зеркала заднего вида у первого транспортного средства 20 во время работы в светлое время суток. Суб-процесс 800 вызывается блоком 622 в процессе 600 и начинается в блоке 802.
[0116] В блоке 802, вычислительное устройство 22 первого транспортного средства 20 разворачивает, например, правое боковое зеркало 30 заднего вида в первое, выдвинутое положение. После разворота правого бокового зеркала 30 заднего вида в первое выдвинутое положение, процесс 800 продолжается в блоке 804.
[0117] В блоке 804, вычислительное устройство 42, ассоциированное со вторым транспортным средством 40, захватывает первое изображение правого бокового зеркала 30 заднего вида. Исходно, вычислительное устройство может передавать сообщение вычислительному устройству 42 через сеть 60, запрашивающее, чтобы вычислительное устройство 42 захватило первое изображение правого бокового зеркала 30 заднего вида.
[0118] После приема запроса вычислительное устройство 42 второго транспортного средства 40 может центрировать зеркало в первом изображении посредством регулировки угла, фокусного расстояния, и т.д. датчика 48, как описано в отношении блока 708. Вычислительное устройство 42 собирает, через датчик 48, ассоциированный со вторым транспортным средством 40, одно или более первые изображения правого бокового зеркала 30 заднего вида на первом транспортном средстве 20. В случае, когда второе транспортное средство 40 находится позади первого транспортного средства 20, как показано, например, на фигуре 5, и в случае, когда правое боковое зеркало 30 заднего вида правильно развернуто в первое положение, первое изображение может включать в себя отражение прямого света от солнца. После захвата первого изображения, суб-процесс 800 продолжается в блоке 806.
[0119] В блоке 806, вычислительное устройство 42, ассоциированное со вторым транспортным средством 40, передает первые данные изображения, представляющие собой первое изображение, вычислительному устройству 22, ассоциированному с первым транспортным средством 20. Дополнительно или в качестве альтернативы, вычислительное устройство 42 может передавать первые данные изображения серверу 80, или сохранять данные в памяти, ассоциированной с вычислительным устройством 42. После переноса или сохранения первых данных изображения, суб-процесс 800 продолжается в блоке 808.
[0120] В блоке 808, вычислительное устройство 22 передает одну или более команды контроллеру 26a зеркала, выдающие инструкцию контроллеру 26a зеркала разворачивать правое боковое зеркало 30 заднего вида во второе, убранное положение. Суб-процесс 800 затем продолжается в блоке 810.
[0121] В блоке 810, вычислительное устройство 42, ассоциированное со вторым транспортным средством 40, захватывает второе изображение правого бокового зеркала 30 заднего вида. Исходно, вычислительное устройство 22 может передавать сообщение вычислительному устройству 42 через сеть 60, запрашивающее, чтобы вычислительное устройство 42 захватило второе изображение правого бокового зеркала 30 заднего вида.
[0122] После приема запроса, вычислительное устройство 42 второго транспортного средства 40 может центрировать зеркало 30 во втором изображении посредством регулировки угла, фокусного расстояния, и т.д. датчика 48, как описано в отношении блока 708. Вычислительное устройство 42 собирает, через датчик 48, ассоциированный со вторым транспортным средством 40, одно или более вторые изображения правого бокового зеркала 30 заднего вида у первого транспортного средства 20. В случае, когда правое боковое зеркало 30 заднего вида развернуто во второе положение, второе изображение не будет включать в себя отраженный солнечный свет. После захвата второго изображения, суб-процесс 800 продолжается в блоке 812.
[0123] В блоке 812, вычислительное устройство 42 передает вторые данные изображения, представляющие собой второе изображение, вычислительному устройству 22, ассоциированному с первым транспортным средством 20. Дополнительно или в качестве альтернативы, вычислительное устройство 42 может передавать вторые данные изображения серверу 80, или сохранять данные в памяти, ассоциированной с вычислительным устройством 42. Суб-процесс 800 затем продолжается в блоке 814.
[0124] В блоке 814, суб-процесс 800 определяет состояние правого бокового зеркала 30 заднего вида на основании первых и вторых данных изображения. Состояние правого бокового зеркала 30 заднего вида может быть, например, определено на основании Таблицы 2, ниже.
|
Таблица 2
[0125] «Виден», используемый в таблице выше, может означать, что уровень яркости выше предварительно определенной пороговой величины. В качестве альтернативы «виден» может означать, что контрастность в изображении между яркими пятнами (где солнечный свет вероятно отражался напрямую) и менее яркими пятнами (где солнечный свет вероятно не отражался напрямую) выше предварительно определенной пороговой величины.
[0126] После определения состояния правого бокового зеркала 30 заднего вида, суб-процесс 800 продолжается в блоке 816.
[0127] В блоке 816, вычислительное устройство 22 определяет, присутствует ли другое зеркало для верификации. В случае, когда работа левого бокового зеркала 32 заднего вида еще не была верифицирована, суб-процесс 800 продолжается в блоке 802. Суб-процесс 800 затем повторяет блоки с 802 по 814 для левого бокового зеркала 32 заднего вида. В случае, когда работа для обоих из правого и левого боковых зеркал 30, 32 заднего вида была верифицирована, суб-процесс 800 заканчивается.
[0128] Суб-процесс 800 описывает вычислительное устройство 22 определяющее рабочее состояние бокового зеркала 30 заднего вида. Тем не менее, эти операции также могут быть выполнены вычислительным устройством 42 во втором транспортном средстве 40 или сервером 80.
[0129] В случае, когда рабочее состояние бокового зеркала 30, 32 заднего вида был определен в светлое время суток на основании отраженного солнечного света, и в темное время суток на основании видимости указателя 31, 33 поворота, может быть получена дополнительная информация касательно состояния указателя 31, 33 поворота. Таблица 3 ниже указывает состояние зеркала 30, 32 и ассоциированного указателя 31, 33 поворота на основании результатов тестов как в светлое время суток, так и темное время суток.
|
Таблица 3
[0130] Вычислительные устройства, такие как те, что обсуждаются в данном документе, как правило, каждое включает в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как те, что идентифицированы выше, и для выполнения блоков или этапов процессов, описанных выше. Например, блоки процесса, которые обсуждались выше, могут быть воплощены в качестве исполняемых компьютером инструкций.
[0131] Исполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных при помощи многообразия языков программирования и/или технологий, включая, без ограничения, и либо отдельно, либо в сочетании, Java™, C, C++, Visual Basic, Java Script, Perl, HTML, и т.д. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя информации, и т.д., и исполняет эти инструкции, тем самым выполняя один или более процессы, включая один или более процессы, описанные в данном документе. Такие инструкции и другие данные могут быть сохранены в файлах и переданы при помощи многообразия компьютерно-читаемых носителей информации. Файл в вычислительном устройстве является, как правило, совокупностью данных, хранящихся на компьютерно-читаемом носителе информации, таком как запоминающий носитель информации, память с произвольным доступом, и т.д.
[0132] Компьютерно-читаемый носитель информации включает в себя любой носитель информации, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером. Такой носитель информации может принимать много форм, включая, но не ограничиваясь, энергонезависимые носители информации, энергозависимые носители информации, и т.д. Энергонезависимые носители информации включают в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимые носители информации включают в себя динамическую память с произвольным доступом (DRAM), которая, как правило, составляет основную память. Общие формы компьютерно-читаемых носителей информации включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель информации, CD-ROM, DVD, любой другой оптический носитель информации, перфокарты, бумажную ленту, любой другой физический носитель информации с шаблоном отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любой другой чип или картридж памяти, или любой другой носитель информации, с которого компьютер может осуществлять чтение.
[0133] Подразумевается, что понятиям, используемым в формуле изобретения, даются их явные и обычные значения, как понятно специалистам в соответствующей области техники, при условии, что в данном документе не приводится явное указание об обратном. В частности, использование форм единственного числа, «упомянутый», и т.д., следует читать как излагающие один или более из указанных элементов, при условии, что пункт формулы изобретения не излагает явное ограничение обратного.
[0134] Понятие «примерный» используется в данном документе в смысле обозначения примера, например, ссылку на «примерный виджет» следует читать как простое обращение к примеру виджета.
[0135] Наречие «приблизительно», модифицирующее значение и результат, означает, что форма, структура, измерение, значение, определение, вычисление, и т.д. откланяется от точно описанной геометрии, расстояния, измерения, значения, определения, вычисления, и т.д., из-за несовершенств в материалах, обработке, изготовлении, измерениях датчика, вычислениях, времени обработки, времени связи, и т.д.
[0136] На чертежах, одни и те же ссылочные номера указывают одни и те же элементы. Кроме того, некоторые или все из этих элементов могут быть изменены. Касательно средств, процессов, систем, способов, и т.д., описанных в данном документе, следует понимать, что несмотря на то, что этапы таких процессов, и т.д., были описаны как происходящие в соответствии с некоторой упорядоченной последовательностью, такие процессы могут быть реализованы на практике с описанными этапами, выполняемыми в очередности отличной от очередности описанной в данной документе. Кроме того следует понимать, что некоторые этапы могут быть выполнены одновременно, что могут быть добавлены другие этапы, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе предоставляются в целях иллюстрации некоторых вариантов осуществления, и не должны толковаться как ограничивающие заявленное изобретение.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Способ определения утечки топливной системы транспортного средства (варианты) и система транспортного средства
Способ для форсированного двигателя, способ для двигателя и система для двигателя
Электрическая соединительная система (варианты) и уплотнительная прокладка электрического соединителя
Способ бортовой диагностики транспортного средства (варианты) и способ бортовой диагностики транспортного средства с гибридным приводом
Способ тестирования на утечку топливной системы транспортного средства (варианты) и способ для гибридного транспортного средства
Система крепления прицепа для транспортного средства, способ управления для системы безопасности сцепного устройства прицепа и транспортное средство
Система диагностики шины
Способ и система управления шторкой решетки радиатора
Транспортное средство с качанием фар

