Результат интеллектуальной деятельности: СПОСОБ ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ РАДИОИЗЛУЧАЮЩИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в однопозиционных системах скрытного контроля наземного, морского и воздушного пространства, осуществляющих траекторное сопровождение подвижных объектов по прямым радиосигналам их бортовых радиопередатчиков и копиям этих радиосигналов, отраженным посторонними отражателями в виде естественных неоднородностей рельефа местности или стационарных и подвижных объектов искусственного происхождения.
Технология траекторного сопровождения целей по излучениям их бортовых радиопередатчиков, использующая естественно возникающие при излучении радиосигналов отражения от произвольно распределенных в пространстве посторонних отражателей, пока еще не получила достаточного распространения, несмотря на то, что осуществима однопозиционной системой контроля и может существенно повысить эксплуатационную эффективность широкого класса систем и комплексов скрытного дистанционного обнаружения, слежения и управления.
Известен способ пространственной локализации радиоизлучающих объектов [1], заключающийся в том, что принимают решеткой антенн радиосигналы бортовых передатчиков объектов, преобразуют принятые радиосигналы в двумерные комплексные угловые спектры принятых радиосигналов, по угловым спектрам определяют азимутальные и угломестные пеленги передатчиков, а после сравнения угломестных пеленгов β с порогом разделяют объекты на наземные и воздушные и определяют наклонную дальность R до воздушных объектов по формуле R=Н/sinβ, где Н - известная высота полета объекта.
Данный способ обеспечивает пространственную локализацию (определение пространственных координат и траекторное сопровождение) радиоизлучающих объектов однопозиционной системой контроля. Однако этот способ требует наличия априорной информации о высоте перемещения объекта и при ее отсутствии теряет свою эффективность.
Известен способ пространственной локализации радиоизлучающих объектов [2], заключающийся в том, что
принимают на заданной частоте приема решеткой антенн прямой радиосигнал бортового передатчика объекта и отраженные от посторонних отражателей копии этого радиосигнала,
синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы,
цифровые сигналы преобразуют в фазированные сигналы для выбранных азимутально-угломестных направлений приема,
фазированные сигналы разделяют на прямой и отраженные сигналы, запоминают направления их приема,
по прямому и отраженным сигналам определяют и запоминают задержку по времени каждого отраженного сигнала относительно прямого сигнала,
по задержкам рассчитывают разности длин путей прямого и каждого отраженного сигнала,
по направлениям приема отраженных сигналов и рассчитанным разностям длин путей вычисляют значения гипотетических координат отражателей в зависимости от значений гипотетической дальности до объекта,
сравнивают значения гипотетических и предварительно измеренных координат отражателей,
при совпадении с заданной точностью гипотетических и предварительно измеренных координат отражателей фиксируют наиболее вероятное значение дальности до радиоизлучающего объекта,
по значению направления приема прямого сигнала и наиболее вероятному значению дальности находят пространственные координаты радиоизлучающего объекта.
Способ-прототип не требует наличия априорной информации о высоте радиоизлучающего объекта и обеспечивает его пространственную локализацию однопозиционной системой контроля.
Однако способ-прототип обладает следующими недостатками, снижающими его эффективность:
1) осуществляет операции проверки гипотезы о значениях пространственных координат отражателей, требующие наличия априорной информации о пространственных координатах возможных отражателей радиосигналов в районе размещения однопозиционной системы контроля и, как следствие:
а) является сложно осуществимым в стационарных комплексах скрытного контроля, так как требует до начала функционирования комплекса продолжительных (несколько лет) и трудоемких (с использованием летно-подъемных средств) операций выбора возможных отражателей радиосигналов и измерения их пространственных координатах.
При этом операции предварительного выбора отражателей предполагают измерение бистатической эффективной площади рассеяния каждого из возможных отражателей на каждой из множества возможных рабочих частот системы контроля и на каждом из возможных угловых направлений приема по азимуту и углу места. Например, в наиболее типичных условиях, при измерениях на каждой из 1000 частот и числе дискретных значений по азимуту 360, а по углу места 90 можно получить, что общее число измерений может достигать очень больших значений 1000×360×90=32400000. Если предположить, что в течение суток выполняется 100 измерений, то общая продолжительность измерения пространственных координат возможных отражателей радиосигналов в районе размещения однопозиционной системы контроля может достигать 324000 суток;
б) не осуществим в мобильных комплексах скрытного контроля, как правило, предназначенных для многократного оперативного перебазирования на новые позиции и, как следствие, требующих минимального времени развертывания;
2) не содержит операций определения вектора скорости радиоизлучающего объекта, что свидетельствует об ограниченности его информативности.
Техническим результатом изобретения является повышение информативности (определение вектора скорости в дополнение к пространственным координатам) и оперативности пространственной локализации широкого класса радиоизлучающих объектов однопозиционной системой контроля в условиях априорной неопределенности формы, размеров, отражающих свойств и пространственных координат посторонних отражателей радиосигналов.
Повышение информативности и оперативности достигается за счет расширения номенклатуры измеряемых параметров отраженных сигналов (временные задержки и доплеровские сдвиги частоты вместо временных задержек) и осуществления операций проверки гипотезы о значениях доплеровских сдвигов отраженных сигналов вместо операций проверки гипотезы о значениях пространственных координат отражателей, являющихся сложно осуществимыми в стационарных и практически не осуществимыми в мобильных комплексах скрытного контроля
Технический результат достигается тем, что в способе пространственной локализации радиоизлучающих объектов, заключающемся в том, что принимают на заданной частоте приема решеткой антенн прямой радиосигнал бортового передатчика объекта и отраженные от посторонних отражателей копии этого радиосигнала, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, согласно изобретению, из цифровых сигналов формируют прямой сигнал бортового передатчика и сигналы комплексных частотно-временных изображений антенн, по которым определяют и запоминают число М отражателей, доплеровский сдвиг частоты ωi и задержку по времени τi сигнала каждого отражателя относительно прямого сигнала, где  - номер отражателя, а также выделяют соответствующие нулевым и найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений, из которых формируют векторный сигнал амплитудно-фазового распределения (АФР) прямого и каждого отраженного сигнала, по АФР определяют единичные вектор-пеленги объекта et и каждого отражателя ei, которые также запоминают, по значениям задержек τi и вектор-пеленгов объекта et и отражателей ei вычисляют гипотетические значения дальности до каждого отражателя
- номер отражателя, а также выделяют соответствующие нулевым и найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений, из которых формируют векторный сигнал амплитудно-фазового распределения (АФР) прямого и каждого отраженного сигнала, по АФР определяют единичные вектор-пеленги объекта et и каждого отражателя ei, которые также запоминают, по значениям задержек τi и вектор-пеленгов объекта et и отражателей ei вычисляют гипотетические значения дальности до каждого отражателя  в зависимости от гипотетических значений дальности до объекта
в зависимости от гипотетических значений дальности до объекта  , где h - текущий номер гипотетического значения дальности, с - скорость света, по гипотетическим значениям дальностей и единичным вектор-пеленгам находят и фиксируют гипотетические координаты отражателей и объекта, формируют и запоминают матрицу Qh, элементы которой
, где h - текущий номер гипотетического значения дальности, с - скорость света, по гипотетическим значениям дальностей и единичным вектор-пеленгам находят и фиксируют гипотетические координаты отражателей и объекта, формируют и запоминают матрицу Qh, элементы которой  где m=1, 2, 3, em - единичные векторы осей декартовой системы координат, с точностью до множителя, равного обратной длине волны λ на частоте приема, являются проекциями на оси декартовой системы координат суммы направлений из точки приема на гипотетическое положение объекта и из гипотетического положения объекта на каждую из точек гипотетических положений отражателей, из запомненных значений доплеровских сдвигов частоты ωi формируют и запоминают вектор-столбец ω измеренных доплеровских сдвигов частоты отраженных сигналов, находят вектор-столбец гипотетической скорости объекта
где m=1, 2, 3, em - единичные векторы осей декартовой системы координат, с точностью до множителя, равного обратной длине волны λ на частоте приема, являются проекциями на оси декартовой системы координат суммы направлений из точки приема на гипотетическое положение объекта и из гипотетического положения объекта на каждую из точек гипотетических положений отражателей, из запомненных значений доплеровских сдвигов частоты ωi формируют и запоминают вектор-столбец ω измеренных доплеровских сдвигов частоты отраженных сигналов, находят вектор-столбец гипотетической скорости объекта  где (Qh)H - матрица, эрмитово сопряженная с Qh, который запоминают и преобразуют в вектор-столбец гипотетических доплеровских сдвигов частоты отраженных сигналов ωh=Qhvh, для каждого значения гипотетической дальности до объекта
где (Qh)H - матрица, эрмитово сопряженная с Qh, который запоминают и преобразуют в вектор-столбец гипотетических доплеровских сдвигов частоты отраженных сигналов ωh=Qhvh, для каждого значения гипотетической дальности до объекта  вычисляют невязку между вектор-столбцами гипотетических ωh и измеренных ω доплеровских сдвигов отраженных сигналов по формуле
вычисляют невязку между вектор-столбцами гипотетических ωh и измеренных ω доплеровских сдвигов отраженных сигналов по формуле  где ωH - вектор-столбец, эрмитово сопряженный с ω, по глобальному минимуму невязки определяют дальность
где ωH - вектор-столбец, эрмитово сопряженный с ω, по глобальному минимуму невязки определяют дальность  до объекта, по которой находят вектор скорости
до объекта, по которой находят вектор скорости  и пространственные координаты
и пространственные координаты  где r0 - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат, объекта.
где r0 - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат, объекта.
Операции способа поясняются чертежами:
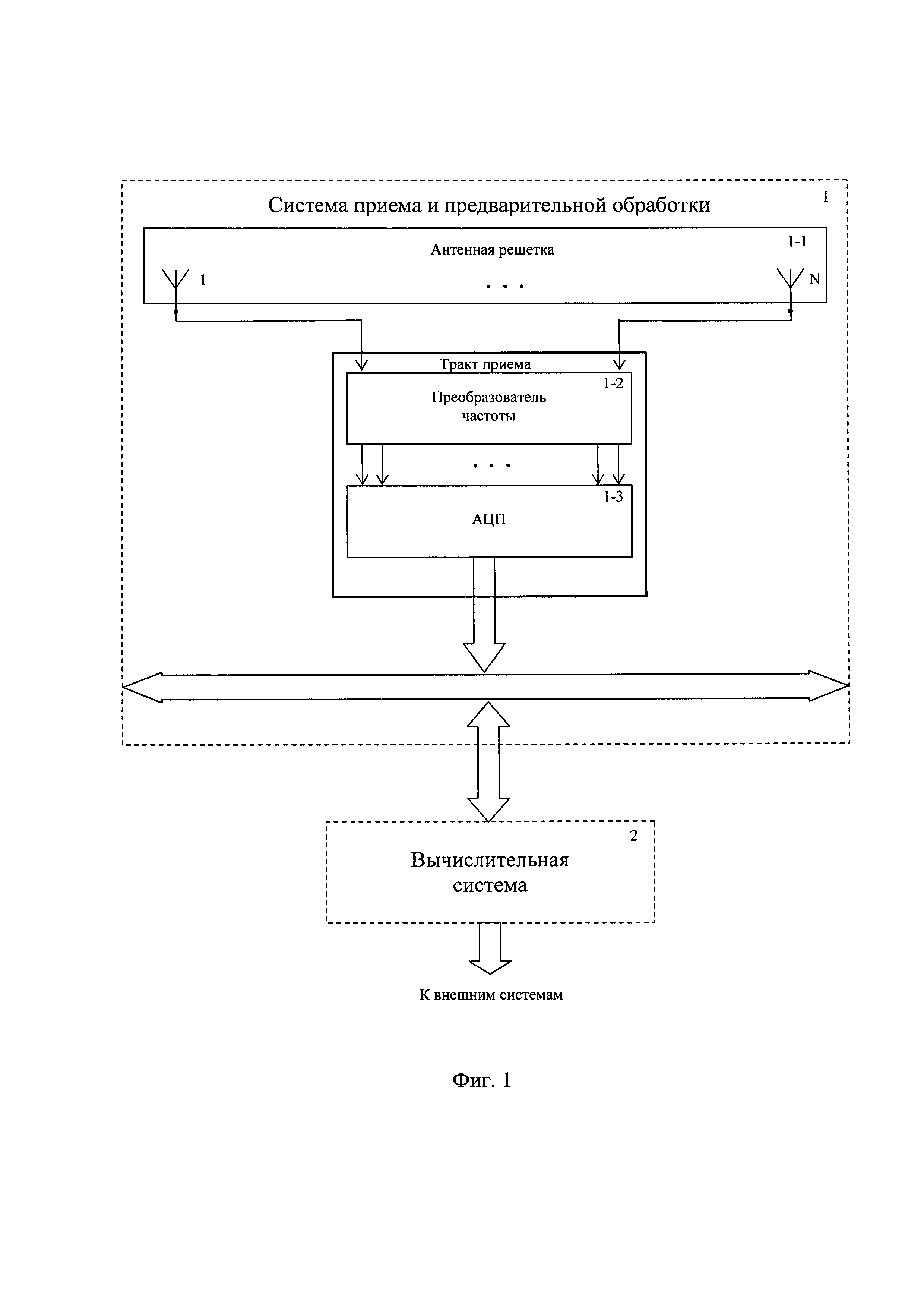
Фиг. 1. Структурная схема устройства, реализующего предложенный способ.
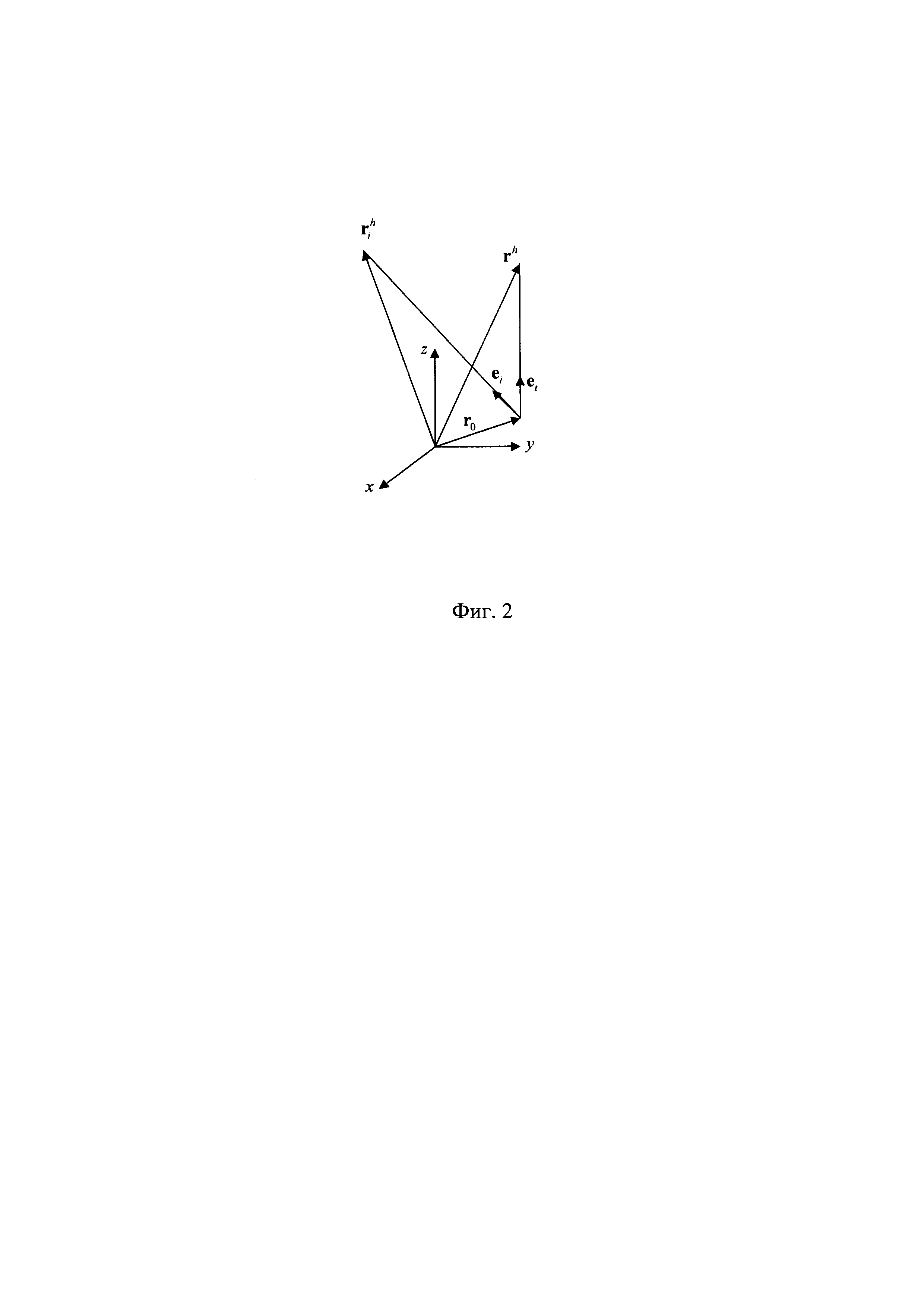
Фиг. 2. Схема взаимного расположения однопозиционной системы контроля, радиопередатчика и отражателя в декартовой системе координат.
Устройство (фиг. 1), в котором реализуется предложенный способ, содержит последовательно соединенные систему приема и предварительной обработки 1 и вычислительную систему 2.
Система 1 включает антенную решетку 1-1, тракт приема радиосигналов, включающий преобразователь частоты 1-2 и АЦП 1-3.
Система 2 имеет выход, предназначенный для подключения к внешним системам. Кроме этого система 2 имеет управляющий выход для настройки на заданную частоту приема преобразователя частоты 1-2 (для упрощения управляющий выход на фиг. 1 не показан).
Система 1 является аналогово-цифровым устройством и предназначена для приема на заданной частоте рабочего диапазона частот и радиосигнала бортового передатчика объекта и отраженных от посторонних отражателей копий этого радиосигнала.
Антенная решетка 1-1 состоит из N антенн с номерами  Каждая антенна обеспечивает прием прямых и отраженных радиосигналов.
Каждая антенна обеспечивает прием прямых и отраженных радиосигналов.
Пространственная конфигурация антенной решетки может быть произвольной: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
Преобразователь частоты 1-2 является N-канальным, выполнен с общим гетеродином и с полосой пропускания каждого канала, изменяемой в соответствии с шириной спектра принимаемого радиосигнала. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов.
АЦП 1-3 также является N-канальным и синхронизирован сигналом одного опорного генератора (для упрощения опорный генератор на фиг. 1 не показан). Если разрядность и быстродействие АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то вместо преобразователя частоты 1-2 могут использоваться частотно избирательные полосовые фильтры и усилители. Кроме этого, преобразователь частоты 1-2 обеспечивает подключение одной из антенн вместо всех антенн решетки для периодической калибровки приемных каналов по внешнему источнику сигнала. Возможна калибровка с использованием внутреннего генератора, выход которого также подключается вместо всех антенн для периодической калибровки каналов (для упрощения внутренний генератор на фиг. 1 не показан).
Вычислительная система 2 предназначена для формирования комплексных частотно-временных изображений радиосигналов, рассеянных посторонними отражателями в анализируемой области доплеровских частот и временных задержек, определения числа отраженных сигналов, их доплеровских сдвигов частоты и задержек по времени относительно прямого сигнала, а также вычисления пространственных координат и вектора скорости контролируемого радиоизлучающего объекта.
Устройство работает следующим образом.
В системе 2 на основе данных от внешних систем периодически обновляются параметры радиопередатчиков объектов, подлежащих пространственной локализации.
Параметры радиопередатчиков (несущая частота и ширина спектра радиосигнала) запоминаются в системе 2, а также используются для настройки преобразователя 1-2. С целью упрощения цепи управления преобразователем не показаны.
Преобразователь частоты 1-2 по сигналам системы 2 перестраивается на заданную частоту приема.
Принятое каждой антенной с номером n решетки 1-1 многолучевое электромагнитное поле прямого и рассеянных радиосигналов в виде зависящих от времени t радиосигналов sn(t) поступает на входы преобразователя частоты 1-2.
В преобразователе частоты 1-2 каждый принятый радиосигнал sn(t) фильтруется по частоте и переносится на более низкую частоту.
Сформированный в преобразователе 1-2 ансамбль радиосигналов sn(t) синхронно преобразуется с помощью АЦП 1-3 в цифровые сигналы sn={sn(1),…,sn(z),…,sn(Z)}T, где  - номер временного отсчета сигнала, которые поступают в систему 2.
- номер временного отсчета сигнала, которые поступают в систему 2.
В вычислительной системе 2 цифровые сигналы sn запоминаются, а также выполняются следующие действия:
- из цифровых сигналов формируются прямой сигнал бортового передатчика и сигналы комплексных частотно-временных изображений антенн.
Формирование прямого сигнала бортового передатчика и сигналов комплексных частотно-временных изображений антенн может быть осуществлено различными способами.
Например, при использовании способа [3] формирование прямого сигнала бортового передатчика включает следующие операции: цифровые сигналы антенн sn объединяются в матрицу сигналов Φ, матрица сигналов Φ преобразуется в пространственную корреляционную матрицу сигналов G=ΦHΦ и в сигнальную матрицу F=ΦΦH, где ΦH - матрица, эрмитово сопряженная с Φ, находится наибольшее собственное значение матрицы G и соответствующий найденному собственному значению главный собственный вектор матрицы F, идентифицируется найденное значение главного собственного вектора как прямой цифровой сигнал u.
Кроме способа [3], для формирования прямого цифрового сигнала можно применить способ [4], осуществляющий итерационную процедуру преобразования цифровых сигналов антенн sn в прямой сигнал u.
Формирование сигналов комплексных частотно-временных изображений антенн может осуществляться классическим способом взаимной корреляции [5] или современными итерационными способами [6-8].
При использовании способа [5] из прямого сигнала u и цифровых сигналов антенн sn формируются зависящие от временного и частотного сдвигов комплексные двумерные взаимно корреляционные функции. Модули комплексных двумерных взаимно корреляционных функций описывают частотно-временное изображение распределения энергии отраженных сигналов в анализируемой области задержек и доплеровских частот и позволяют определять число отражателей, доплеровский сдвиг частоты и задержку по времени сигнала каждого отражателя.
Итерационные способы [6-8] за счет дополнительных операций нелинейной обработки сигналов обеспечивают формирование частотно-временных изображений распределения энергии отраженных сигналов в анализируемой области задержек и доплеровских частот с повышенным динамическим диапазоном и разрешающей способностью;
Таким образом, описанные операции формирования сигналов двумерных комплексных частотно-временных изображений являются ключевыми при повышении информативности и оперативности, так как позволяют описывать распределение отраженных радиосигналов не только в области временных задержек, но и в области доплеровских сдвигов.
В результате осуществления этих операций обеспечивается возможность увеличения числа измеряемых и моделируемых параметров в виде относительных задержек по времени и доплеровских сдвигов частоты сигналов отражателей, вместо относительных задержек.
На последующих этапах обработки сигналов это открывает возможность определения не только пространственных координат радиопередатчика, но и вектора его скорости.
За счет этого повышается информативность пространственной локализации широкого класса радиопередатчиков однопозиционной системой контроля. Более того, не требуется априорное знание координат отражателей, то есть, устраняется второй основной недостаток способа-прототипа - сложность осуществимости в стационарных и практическая неосуществимость в мобильных комплексах скрытного контроля.
Кроме этого в вычислительной системе 2 выполняются следующие действия:
- по сигналам комплексных частотно-временных изображений антенн определяется и запоминается число М отражателей, доплеровский сдвиг частоты ωi и задержку по времени τi сигнала каждого отражателя относительно прямого сигнала, где  - номер отражателя;
- номер отражателя;
- из сигналов комплексных частотно-временных изображений антенн выделяются соответствующие нулевым и найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений;
- из выделенных составляющих комплексных частотно-временных изображений формируются векторные сигналы амплитудно-фазового распределений (АФР) прямого и каждого отраженного сигнала;
- по сформированным АФР определяются, например, как в способе [1], единичные вектор-пеленги объекта et и каждого отражателя ei, которые также запоминаются.
После этого в вычислительной системе 2 выполняются следующие действия:
- по значениям задержек τi и вектор-пеленгов объекта et и отражателей ei вычисляются гипотетические значения дальности до каждого отражателя  в зависимости от гипотетических значений дальности до объекта
в зависимости от гипотетических значений дальности до объекта  , где h - текущий номер гипотетического значения дальности, с - скорость света;
, где h - текущий номер гипотетического значения дальности, с - скорость света;
- по гипотетическим значениям дальностей  ,
,  и единичным вектор-пеленгам ei и et находятся и фиксируются гипотетические координаты отражателей и объекта.
и единичным вектор-пеленгам ei и et находятся и фиксируются гипотетические координаты отражателей и объекта.
Гипотетические координаты отражателей и передатчика вычисляются по следующим формулам:  и
и  где r0 - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат;
где r0 - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат;
- формируется и запоминается матрица Qh, элементы которой  где m=1, 2, 3, em - единичные векторы осей декартовой системы координат, с точностью до множителя, равного обратной длине волны λ на частоте приема, являются проекциями на оси декартовой системы координат суммы направлений из точки приема с радиус-вектором r0 на гипотетическое положение передатчика с радиус-вектором rh и из гипотетического положения передатчика на каждую из точек с радиус-вектором
где m=1, 2, 3, em - единичные векторы осей декартовой системы координат, с точностью до множителя, равного обратной длине волны λ на частоте приема, являются проекциями на оси декартовой системы координат суммы направлений из точки приема с радиус-вектором r0 на гипотетическое положение передатчика с радиус-вектором rh и из гипотетического положения передатчика на каждую из точек с радиус-вектором  гипотетических положений отражателей (фиг. 2);
гипотетических положений отражателей (фиг. 2);
- из запомненных значений доплеровских сдвигов частоты ωi формируется и запоминается вектор-столбец ω измеренных доплеровских сдвигов частоты отраженных сигналов;
- находится вектор-столбец гипотетической скорости объекта  где (Qh)H - матрица, эрмитово сопряженная с матрицей Qh.
где (Qh)H - матрица, эрмитово сопряженная с матрицей Qh.
Отметим, что формула  может быть получена из переопределенной системы Qhvh=ω, включающей М уравнений относительно трех компонент вектора-столбца гипотетической скорости передатчика vh;
может быть получена из переопределенной системы Qhvh=ω, включающей М уравнений относительно трех компонент вектора-столбца гипотетической скорости передатчика vh;
- вектор-столбец гипотетической скорости объекта  запоминается и преобразуется в вектор-столбец гипотетических доплеровских сдвигов частоты отраженных сигналов ωh=Qhvh;
запоминается и преобразуется в вектор-столбец гипотетических доплеровских сдвигов частоты отраженных сигналов ωh=Qhvh;
- для каждого значения гипотетической дальности до объекта  вычисляется невязка между вектор-столбцами гипотетических ωh и измеренных ω доплеровских сдвигов отраженных сигналов по формуле
вычисляется невязка между вектор-столбцами гипотетических ωh и измеренных ω доплеровских сдвигов отраженных сигналов по формуле  где ωH - вектор-столбец, эрмитово сопряженный с вектор-столбцом ω;
где ωH - вектор-столбец, эрмитово сопряженный с вектор-столбцом ω;
- по глобальному минимуму невязки определяется дальность  до объекта, по которой находятся вектор скорости
до объекта, по которой находятся вектор скорости  и пространственные координаты
и пространственные координаты  где r0 - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат, объекта.
где r0 - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат, объекта.
При определении вектора скорости v радиопередатчика по полученной оценке дальности  находятся элементы
находятся элементы  матрицы Q, которая подставляется в формулу для вычисления вектора скорости
матрицы Q, которая подставляется в формулу для вычисления вектора скорости  где (Q)H - матрица, эрмитово сопряженная с матрицей Q.
где (Q)H - матрица, эрмитово сопряженная с матрицей Q.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение информативности (определение вектора скорости в дополнение к пространственным координатам) и оперативности пространственной локализации широкого класса радиоизлучающих объектов однопозиционной системой контроля в условиях априорной неопределенности формы, размеров, отражающих свойств и пространственных координат посторонних отражателей радиосигналов.
Таким образом, за счет расширения номенклатуры измеряемых параметров отраженных сигналов (временные задержки и доплеровские сдвиги частоты вместо временных задержек) и осуществления операций проверки гипотезы о значениях доплеровских сдвигов отраженных сигналов вместо операций проверки гипотезы о значениях пространственных координат отражателей, являющихся сложно осуществимыми в стационарных и практически не осуществимыми в мобильных комплексах скрытного контроля, удается решить поставленную задачу с достижением указанного технического результата.
Источники информации:
1. RU, патент, 2158002 С1, кл. G01S 13/14, 5/04, 2000 г.
2. RU, патент, 2457505 С2, кл. G01S 5/04 (2006.01), 2012 г.
3. RU, патент, 2534222 С1, кл. G01S 13/02 (2006.01), 2013 г.
4. RU, патент, 2528391 С1, кл. G01S 13/02 (2006.01), 2013 г.
5. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
6. RU, патент, 2521608 С1, кл. G01S 13/02 (2006.01), 2014 г.
7. RU, патент, 2524401 С1, кл. G01S 13/02 (2006.01), 2014 г.
8. RU, патент, 2557250 С1, кл. G01S 13/02 (2006.01), 2015 г.
Способ пространственной локализации радиоизлучающих объектов, заключающийся в том, что принимают на заданной частоте приема решеткой антенн прямой радиосигнал бортового передатчика объекта и отраженные от посторонних отражателей копии этого радиосигнала, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, отличающийся тем, что из цифровых сигналов формируют прямой сигнал бортового передатчика и сигналы комплексных частотно-временных изображений антенн, по которым определяют и запоминают число М отражателей, доплеровский сдвиг частоты ω и задержку по времени τ сигнала каждого отражателя относительно прямого сигнала, где - номер отражателя, а также выделяют соответствующие нулевым и найденным сдвигам и задержкам составляющие комплексных частотно-временных изображений, из которых формируют векторный сигнал амплитудно-фазового распределения (АФР) прямого и каждого отраженного сигнала, по АФР определяют единичные вектор-пеленги объекта e и каждого отражателя e, которые также запоминают, по значениям задержек τ и вектор-пеленгов объекта e и отражателей e вычисляют гипотетические значения дальности до каждого отражателя в зависимости от гипотетических значений дальности до объекта , где h - текущий номер гипотетического значения дальности, с - скорость света, по гипотетическим значениям дальностей и единичным вектор-пеленгам находят и фиксируют гипотетические координаты отражателей и объекта, формируют и запоминают матрицу Q, элементы которой где m=1, 2, 3, e - единичные векторы осей декартовой системы координат, с точностью до множителя, равного обратной длине волны λ на частоте приема, являются проекциями на оси декартовой системы координат суммы направлений из точки приема на гипотетическое положение объекта и из гипотетического положения объекта на каждую из точек гипотетических положений отражателей, из запомненных значений доплеровских сдвигов частоты ω формируют и запоминают вектор-столбец ω измеренных доплеровских сдвигов частоты отраженных сигналов, находят вектор-столбец гипотетической скорости объекта где (Q) - матрица, эрмитово сопряженная с Q, который запоминают и преобразуют в вектор-столбец гипотетических доплеровских сдвигов частоты отраженных сигналов ω=Qv, для каждого значения гипотетической дальности до объекта вычисляют невязку между вектор-столбцами гипотетических ω и измеренных ω доплеровских сдвигов отраженных сигналов по формуле где ω - вектор-столбец, эрмитово сопряженный с ω, по глобальному минимуму невязки определяют дальность до объекта, по которой находят вектор скорости и пространственные координаты где r - радиус-вектор положения однопозиционной системы контроля в декартовой системе координат, объекта.





Перестраиваемый фазовращатель свч
Дискретный фазовращатель свч
Способ дистанционного обнаружения и сопровождения радиомолчащих объектов
Способ пространственной локализации радиопередатчиков
Способ дистанционного мониторинга радиомолчащих объектов
Способ пассивного обнаружения воздушных объектов
Способ приема сигналов в системах скрытной радиолокации
Способ пеленгования с повышенной разрешающей способностью
Способ скрытного обнаружения подвижных объектов
Способ обнаружения подвижных объектов
Способ обнаружения малоразмерных подвижных объектов
Способ обнаружения и пространственной локализации подвижных объектов
Способ поиска малозаметных подвижных объектов
Способ скрытной радиолокации подвижных объектов
Способ обнаружения малозаметных подвижных объектов

