Результат интеллектуальной деятельности: Способ снижения структурной погрешности традиционного цифрового датчика физической величины в аналого-цифровой системе автоматического управления или контроля
Вид РИД
Изобретение
Предлагаемое изобретение относится к области автоматики и управления (G05), вычислительной (G06) и измерительной (G01) техники и может быть реализовано в виде новой последовательности и структуры операций преобразования сигналов датчиков различных физических величин, предназначенных для работы в современных аналого-цифровых системах автоматического управления и контроля (САУ).
Наиболее распространенным элементом современных аналого-цифровых САУ являются цифровые датчики [1-18, 22-33], содержащие чувствительный элемент (ЧЭ) и аналого-цифровой интерфейс (АЦИ), преобразующий выходные сигналы чувствительного элемента в дискретные выходные сигналы цифрового датчика, которые затем вводятся в систему автоматического управления. Такие цифровые датчики реализуют известную [4,5,7,14,15,16,20,22] последовательность операций формирования дискретного сигнала из входного аналогового сигнала и используются во многих САУ [19,3,21,22,17,23,25].
Ближайшим прототипом заявляемого способа является известная последовательность преобразования входного аналогового сигнала в цифровой дискретный сигнал, описанная в монографии [Клаассен К.Б. Основы измерений. Электронные методы и приборы в измерительной технике. Москва: Постмаркет, 2002. – с. 292-294, рис. 4.15]. Известный способ реализован применительно к цифровому датчику, который содержит (фиг. 1) чувствительный элемент 2, выход которого подключен ко входу аналого-цифрового интерфейса 3, а также выход 4 датчика, причем на чувствительный элемент 2 воздействует входной непрерывный сигнал  , описываемый полиномиальной функцией времени t степени r, и являющийся выходной переменной некоторого объекта управления или контроля, при этом чувствительный элемент 2 и аналого-цифровой интерфейс 3 формируют в моменты времени t = kT,
, описываемый полиномиальной функцией времени t степени r, и являющийся выходной переменной некоторого объекта управления или контроля, при этом чувствительный элемент 2 и аналого-цифровой интерфейс 3 формируют в моменты времени t = kT,  на выходе аналого-цифрового интерфейса (3) запаздывающий на целое число q периодов времени Т относительно входного непрерывного сигнала
на выходе аналого-цифрового интерфейса (3) запаздывающий на целое число q периодов времени Т относительно входного непрерывного сигнала  чувствительного элемента (2) выходной дискретный сигнал
чувствительного элемента (2) выходной дискретный сигнал  ,
,  и фильтруют его от шумов и помех с пренебрежимо малыми ошибками [22,23,24,25].
и фильтруют его от шумов и помех с пренебрежимо малыми ошибками [22,23,24,25].
Существенный недостаток известного способа преобразования сигнала в традиционном датчике 1 фиг. 1 состоит в том, что при его практической реализации выходной дискретный сигнал датчика имеет задержку на целое число q периодов времени Т относительно входного непрерывного сигнала чувствительного элемента 2. Это приводит к существенным динамическим ошибкам в работе САУ, использующих традиционный цифровой датчик 1 [21,23,25].
Основная задача изобретения состоит во введении в известный способ [22] операции дополнительного преобразования выходного сигнала аналого-цифрового интерфейса 3 (АЦИ), которое осуществляется в дополнительном астатическом быстродействующем дискретном корректоре 5 (АБДК), который включается между выходом АЦИ 3 и выходом датчика 4. При выполнении заявляемых требований к порядку астатизма, относительной степени и порядку дополнительного АБДК задержка сигнала на выходе 4 датчика минимизируется [26,27,28]. Это позволяет уменьшить динамическую ошибку САУ с обратной связью (фиг. 2), в которых используются традиционный цифровой датчик 1. Таким образом, в предлагаемом способе при его практической реализации снижается структурная погрешность цифрового датчика 1, что крайне важно для построения современных систем автоматического управления, а также контроля (измерения) различных физических величин.
Поставленная задача достигается тем, что в известном способе преобразования сигналов, который реализуется в традиционном цифровом датчике 1, содержащем чувствительный элемент 2, выход которого подключен ко входу аналого-цифрового интерфейса 3, а выход аналого-цифрового интерфейса 3 подключен к выходу 4 датчика, причем на чувствительный элемент 2 воздействует входной непрерывный сигнал  , описываемый полиномиальной функцией времени t степени r, и являющийся выходной переменной некоторого объекта управления или контроля, а чувствительный элемент 2 и аналого-цифровой интерфейс 3 формируют в моменты времени
, описываемый полиномиальной функцией времени t степени r, и являющийся выходной переменной некоторого объекта управления или контроля, а чувствительный элемент 2 и аналого-цифровой интерфейс 3 формируют в моменты времени  , на выходе аналого-цифрового интерфейса (3) запаздывающий на целое число q периодов времени Т относительно входного непрерывного сигнала чувствительного элемента (2) выходной дискретный сигнал , и фильтруют его от шумов и помех с пренебрежимо малыми ошибками, предусмотрена дополнительная операция преобразования выходного сигнала аналого-цифрового интерфейса 3 до его поступления на выход 4 датчика (фиг. 2) , состоящая в том, что выходной дискретный сигнал ,
, на выходе аналого-цифрового интерфейса (3) запаздывающий на целое число q периодов времени Т относительно входного непрерывного сигнала чувствительного элемента (2) выходной дискретный сигнал , и фильтруют его от шумов и помех с пренебрежимо малыми ошибками, предусмотрена дополнительная операция преобразования выходного сигнала аналого-цифрового интерфейса 3 до его поступления на выход 4 датчика (фиг. 2) , состоящая в том, что выходной дискретный сигнал ,  аналого-цифрового интерфейса 3, запаздывающий на целое число q периодов времени T относительно дискретных значений ξ1(kT) входного непрерывного сигнала чувствительного элемента 2, обрабатывают в дополнительном астатическом быстродействующем дискретном корректоре 5, включенном между выходом аналого-цифрового интерфейса 3 и выходом 4 датчика, при этом дополнительный астатический быстродействующий дискретный корректор 5 имеет порядок астатизма
аналого-цифрового интерфейса 3, запаздывающий на целое число q периодов времени T относительно дискретных значений ξ1(kT) входного непрерывного сигнала чувствительного элемента 2, обрабатывают в дополнительном астатическом быстродействующем дискретном корректоре 5, включенном между выходом аналого-цифрового интерфейса 3 и выходом 4 датчика, при этом дополнительный астатический быстродействующий дискретный корректор 5 имеет порядок астатизма  на единицу больше, чем степень r полинома, описывающего входной непрерывный сигнал чувствительного элемента 2 как функцию времени t, т.е.
на единицу больше, чем степень r полинома, описывающего входной непрерывный сигнал чувствительного элемента 2 как функцию времени t, т.е.  . При этом передаточная функция АБДК
. При этом передаточная функция АБДК
 (1)
(1)
имеет относительную степень  равную единице, а значение порядка АБДК
равную единице, а значение порядка АБДК  таково, что полином
таково, что полином  имеет
имеет  корней тождественно равных единице, т.е.
корней тождественно равных единице, т.е.
 , (2)
, (2)
где полиномы
 ,
,  . (3)
. (3)
При этом коэффициенты полинома  могут иметь произвольные значения, а коэффициенты полинома
могут иметь произвольные значения, а коэффициенты полинома  определяют характер переходного процесса АБДК. Поэтому, если
определяют характер переходного процесса АБДК. Поэтому, если
 ,
,  , (4)
, (4)
то АБДК имеет постоянное перерегулирование  .
.
На чертеже фиг. 1 показана схема цифрового датчика-прототипа 1, а на чертеже фиг. 2 – схема его включения в типовую аналого-цифровую систему автоматического управления и контроля, которая содержит объект управления и исполнительное устройство (ОУ и ИУ), модуль реализации алгоритмов управления (МРАУ), чувствительный элемент 2 (ЧЭ), аналого-цифровой интерфейс 3 (АЦИ).
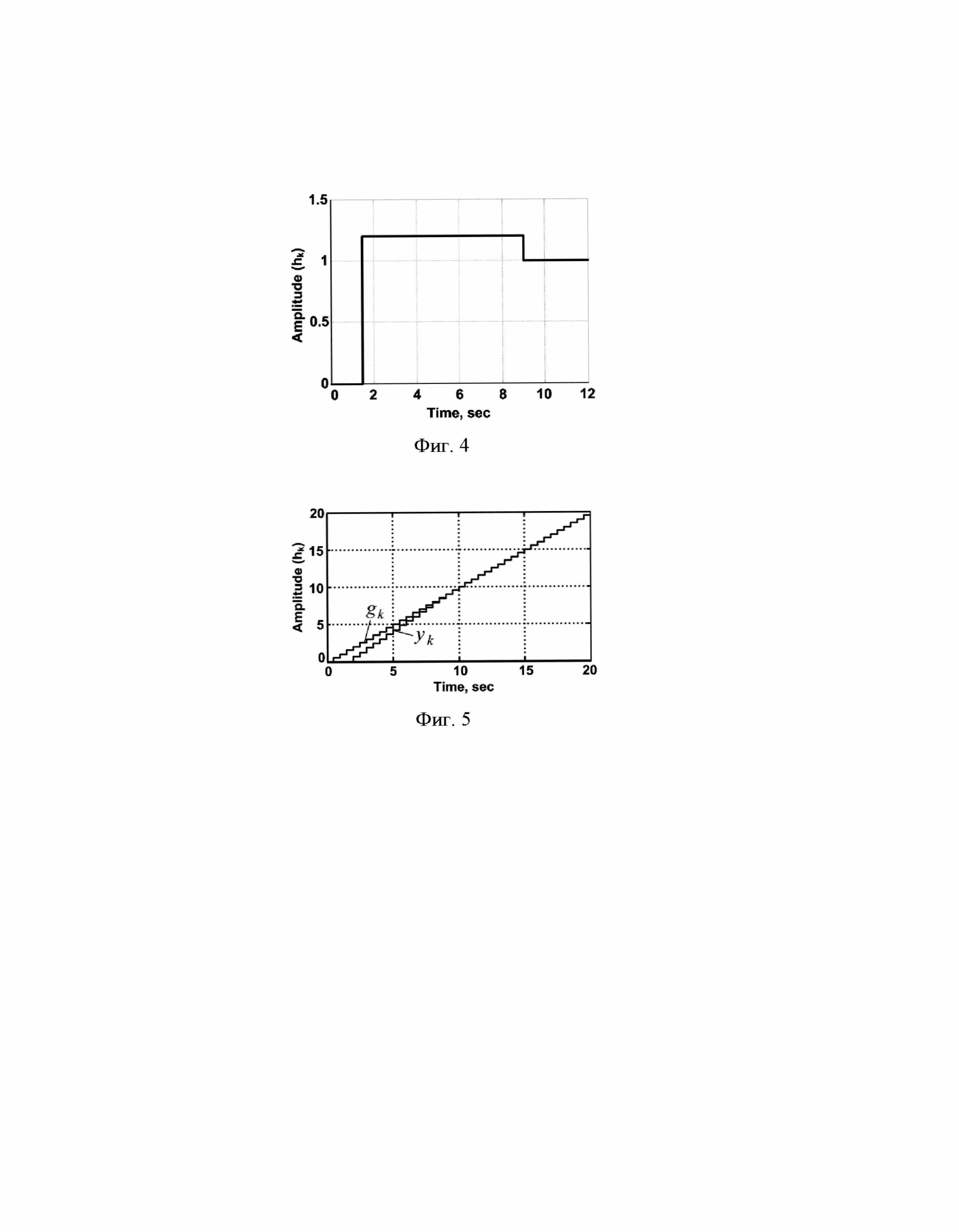
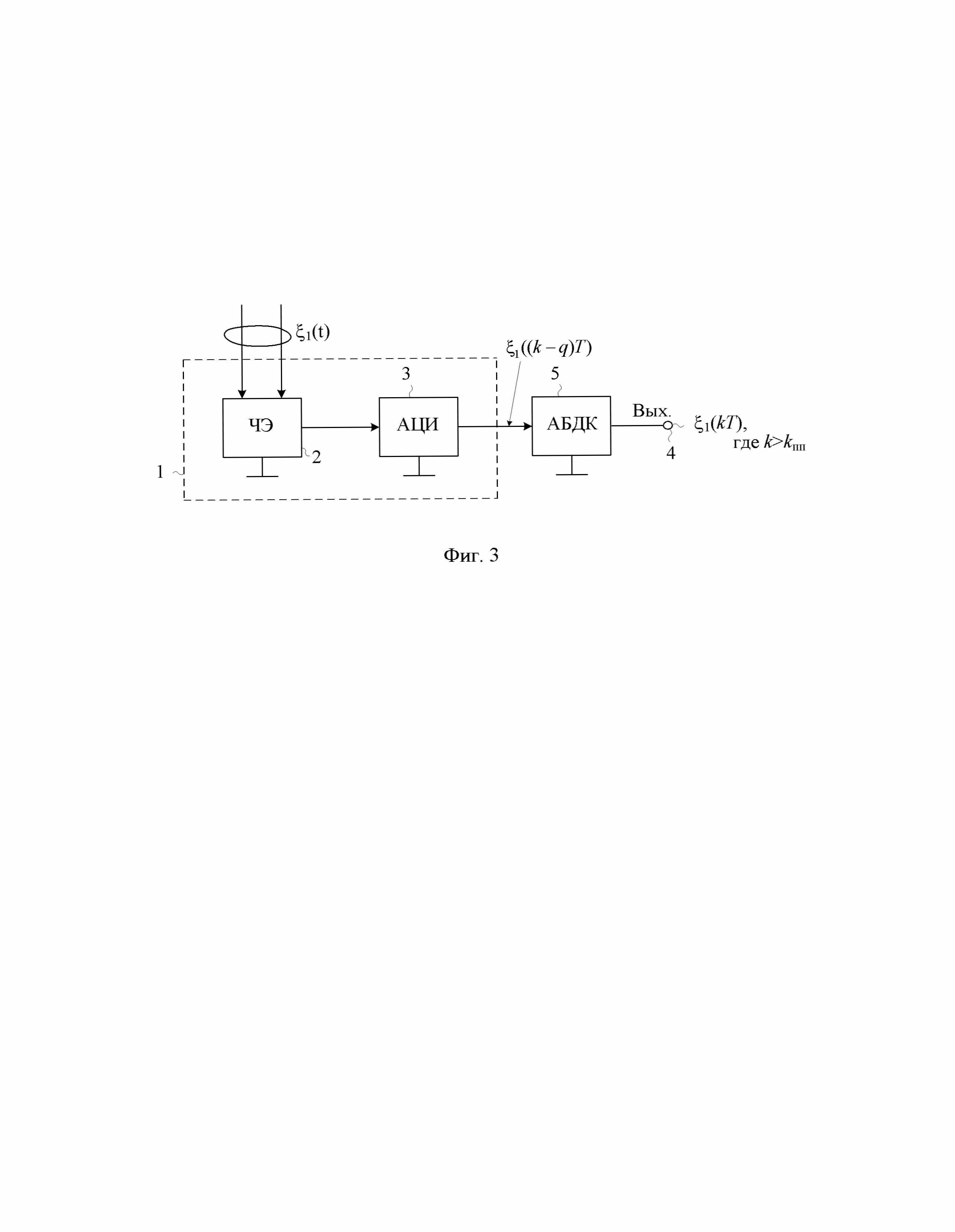
На чертеже фиг. 3 представлена схема цифрового датчика, поясняющая сущность заявляемого способа в соответствии с формулой изобретения.
На чертеже фиг. 4 показана реакция датчика на переменную  = 1(0,5k), а на чертеже фиг. 5 - реакция датчика на переменную = 0,5k.
= 1(0,5k), а на чертеже фиг. 5 - реакция датчика на переменную = 0,5k.
Способ снижения структурной погрешности традиционного цифрового датчика физической величины 1 в аналого-цифровой системе автоматического управления или контроля, содержащего чувствительный элемент 2, выход которого подключен ко входу аналого-цифрового интерфейса 3, а также выход 4 датчика, причем на чувствительный элемент 2 воздействует входной непрерывный сигнал  , описываемый полиномиальной функцией времени t степени r и являющийся выходной переменной некоторого объекта управления или контроля, при этом чувствительный элемент 2 и аналого-цифровой интерфейс 3 формируют в моменты времени t = kT, на выходе аналого-цифрового интерфейса 3 запаздывающий на целое число q периодов времени Т относительно входного непрерывного сигнала чувствительного элемента 2 выходной дискретный сигнал , и фильтруют его от шумов и помех с пренебрежимо малыми ошибками. Выходной дискретный сигнал ,
, описываемый полиномиальной функцией времени t степени r и являющийся выходной переменной некоторого объекта управления или контроля, при этом чувствительный элемент 2 и аналого-цифровой интерфейс 3 формируют в моменты времени t = kT, на выходе аналого-цифрового интерфейса 3 запаздывающий на целое число q периодов времени Т относительно входного непрерывного сигнала чувствительного элемента 2 выходной дискретный сигнал , и фильтруют его от шумов и помех с пренебрежимо малыми ошибками. Выходной дискретный сигнал ,  аналого-цифрового интерфейса 3, запаздывающий на целое число q периодов времени T относительно дискретных значений ξ1(kT),
аналого-цифрового интерфейса 3, запаздывающий на целое число q периодов времени T относительно дискретных значений ξ1(kT),  входного непрерывного сигнала чувствительного элемента 2, обрабатывают в дополнительном астатическом быстродействующем дискретном корректоре 5, включенном между выходом аналого-цифрового интерфейса 3 и выходом 4 датчика, при этом дополнительный астатический быстродействующий дискретный корректор 5 имеет конечный переходный процесс; его порядок астатизма на единицу больше, чем степень полинома, описывающего входной непрерывный сигнал чувствительного элемента 2 как функцию времени t, а относительная степень передаточной функции астатического быстродействующего дискретного корректора равна единице.
входного непрерывного сигнала чувствительного элемента 2, обрабатывают в дополнительном астатическом быстродействующем дискретном корректоре 5, включенном между выходом аналого-цифрового интерфейса 3 и выходом 4 датчика, при этом дополнительный астатический быстродействующий дискретный корректор 5 имеет конечный переходный процесс; его порядок астатизма на единицу больше, чем степень полинома, описывающего входной непрерывный сигнал чувствительного элемента 2 как функцию времени t, а относительная степень передаточной функции астатического быстродействующего дискретного корректора равна единице.
Рассмотрим работу цифрового датчика, реализующего заявляемый способ снижения его структурной погрешности (фиг. 3).
Датчики, традиционно используемые в системах автоматического управления и контроля (САУ), обычно представляют собой совокупность чувствительного элемента (ЧЭ) и аналого-цифрового интерфейса (АЦИ), который обеспечивает сопряжение чувствительного элемента с последующими элементами САУ [19,21,22,33]. Для повышения точности преобразования после традиционного цифрового датчика 1 предлагается ввести специальную обработку сигнала в дополнительном астатическом быстродействующем дискретном корректоре (АБДК), как показано на чертеже фиг. 3.
Будем предполагать, что чувствительный элемент 2 совместно с АЦИ 3 формирует с некоторыми периодом T дискретные значения выходной величины объекта управления, являющейся входным сигналом датчика. Обычно эти значения содержат случайные шумы и помехи, поэтому в АЦИ 3 они подвергаются процедурам сглаживания, так что поступающие на вход АБДК 5 дискретные значения содержат пренебрежимо малые отклонения от значений входной величины , измеряемой датчиком (в соответствующие моменты времени).
Сглаживающие свойства АЦИ 3, который является динамической системой, характеризуются некоторыми переходными процессами [24, 25, 26]. Вследствие этого, сглаженные дискретные значения измеряемой переменной формируются на выходе АЦИ 3 с некоторой задержкой по времени τз = qT, где q ≥ 0 целое число, что приводит к возникновению ошибок датчика фиг. 1, обусловленных этой задержкой. Основной целью специальной дополнительной обработки сигнала в АБДК 5 является компенсация влияния указанной задержки по времени на точность цифрового датчика в целом. Поэтому передаточная функция АБДК 5 формируется такой, чтобы к окончанию переходного процесса в АБДК 5 выходной сигнал датчика не имел задержки по отношению ко входному сигналу чувствительного элемента 1. Тем самым устраняется структурная ошибка, обусловленная запаздыванием выходного сигнала АЦИ 3 [27, 28].
Покажем это аналитически. Известно, что если некоторый цифровой элемент порядка  имеет конечную длительность переходных процессов по входному воздействию
имеет конечную длительность переходных процессов по входному воздействию  , то его передаточная функция (3) по этому воздействию имеет вид
, то его передаточная функция (3) по этому воздействию имеет вид
 . (5)
. (5)
С другой стороны, если тот же элемент (3) по воздействию  имеет порядок астатизма
имеет порядок астатизма  , то его передаточная функция (5) удовлетворяет равенству
, то его передаточная функция (5) удовлетворяет равенству
 , (6)
, (6)
где V(z) – нормированный по старшей степени полином, степень которого  [21, 29, 30].
[21, 29, 30].
Покажем, что цифровой датчик, построенный по заявляемому способу (фиг. 3), т.е. характеризующийся выражениями (1) – (4), имеет конечный переходной процесс, порядок астатизма на единицу больше степени полинома от t, описывающего входной сигнал датчика, и по окончании переходного процесса его ошибка равна нулю.
Из формулы изобретения следует, что ЧЭ 2 и АЦИ 3 цифрового датчика (фиг. 3) при всех  , формируют с периодом Т и с задержкой по времени на q периодов Т дискретные значения
, формируют с периодом Т и с задержкой по времени на q периодов Т дискретные значения  переменной
переменной  , описываемой полиномом степени r и поступающей на вход цифрового датчика. Обозначим выходной сигнал АЦИ как
, описываемой полиномом степени r и поступающей на вход цифрового датчика. Обозначим выходной сигнал АЦИ как  ,
,  ; тогда его z-изображение определяется выражением
; тогда его z-изображение определяется выражением
 , (7)
, (7)
где  – z-изображение дискретного сигнала , значения которого в моменты времени , равны дискретным значениям непрерывного сигнала степени r, поступающего на вход рассматриваемого цифрового датчика, то есть
– z-изображение дискретного сигнала , значения которого в моменты времени , равны дискретным значениям непрерывного сигнала степени r, поступающего на вход рассматриваемого цифрового датчика, то есть  , . Поэтому z-изображение сигнала , имеет вид
, . Поэтому z-изображение сигнала , имеет вид
 , (8)
, (8)
где  – некоторый полином, степень которого не более r +1. Обычно степень r – известная величина, а коэффициенты
– некоторый полином, степень которого не более r +1. Обычно степень r – известная величина, а коэффициенты  – заранее неизвестны.
– заранее неизвестны.
С выхода АЦИ 3 (см. фиг. 3) дискретные значения ,  поступают на вход АБДК 5 с передаточной функцией,
поступают на вход АБДК 5 с передаточной функцией,  , которая имеет вид (1). Так как ЧЭ, АЦИ и АБДК соединены последовательно, то из выражений (1) и (7) следует, что передаточная функция датчика, построенного по предлагаемому способу, имеет вид
, которая имеет вид (1). Так как ЧЭ, АЦИ и АБДК соединены последовательно, то из выражений (1) и (7) следует, что передаточная функция датчика, построенного по предлагаемому способу, имеет вид
 . (9)
. (9)
Из сравнения выражений (9) и (5) с очевидностью следует, что рассматриваемый цифровой датчик, действительно, имеет конечный переходной процесс, продолжительностью  .
.
Из выражения (2) следует, что полином  из (9) определяется выражением
из (9) определяется выражением  , подставим это выражение в (9):
, подставим это выражение в (9):
 . (10)
. (10)
Используя полученную передаточную функцию (10) цифрового датчика, найдем его передаточную функцию по ошибке  :
:
 . (11)
. (11)
Отсюда в соответствии с выражением (6) следует, что порядок астатизма датчика, построенного по заявляемому способу, равен  , т.е. действительно, на единицу больше степени r полинома, описывающего сигнал
, т.е. действительно, на единицу больше степени r полинома, описывающего сигнал  , поступающий на вход рассматриваемого цифрового датчика.
, поступающий на вход рассматриваемого цифрового датчика.
Покажем также, что его ошибка равна нулю после окончания переходного процесса, т.е. при  , где
, где  . С этой целю из выражения (11) найдем z-изображение ошибки и учтем выражение (8). В результате будем иметь
. С этой целю из выражения (11) найдем z-изображение ошибки и учтем выражение (8). В результате будем иметь
 .
.
Отсюда, сокращая полином  , выводим равенство
, выводим равенство
 . (12)
. (12)
В соответствии с выражениями (3) и (8) степень произведения  не превышает значения
не превышает значения  . Поэтому, применяя теорему z-преобразования о предельном значении [21, 31, 32 (с. 197)] к выражению (12), получим
. Поэтому, применяя теорему z-преобразования о предельном значении [21, 31, 32 (с. 197)] к выражению (12), получим
 .
.
В рассматриваемом случае датчик, построенный по заявляемому способу, имеет переходной процесс конечной длительности . Поэтому его ошибка  при всех
при всех  равна
равна  .
.
Отметим также, что АБДК, описывается передаточной функцией (1), (3) или (4), которая имеет относительную степень  , поэтому он является функциональным модулем, реализуемым типовыми цифровыми средствами (микроконтроллеры, сигнальные процессоры, ПЛИС-элементы и т.п.) [21, 33-35].
, поэтому он является функциональным модулем, реализуемым типовыми цифровыми средствами (микроконтроллеры, сигнальные процессоры, ПЛИС-элементы и т.п.) [21, 33-35].
Численные значения порядка АБДК  определяются решением уравнения (2), где полином
определяются решением уравнения (2), где полином  берется в виде либо (3), либо (4). Этот выбор зависит от желаемого порядка астатизма датчика
берется в виде либо (3), либо (4). Этот выбор зависит от желаемого порядка астатизма датчика  и перерегулирования
и перерегулирования  ; Выбор того или иного порядка астатизма определяется степенью r полинома , который описывает сигнал
; Выбор того или иного порядка астатизма определяется степенью r полинома , который описывает сигнал  , поступающий на вход датчика. Если этот сигнал может иметь различные, но постоянные значения (тогда его
, поступающий на вход датчика. Если этот сигнал может иметь различные, но постоянные значения (тогда его  ), то можно полагать
), то можно полагать  . В этом случае полином берется в виде (4). При этом передаточная функция датчика определяется вытекающим из (9) и (4) выражением
. В этом случае полином берется в виде (4). При этом передаточная функция датчика определяется вытекающим из (9) и (4) выражением
 , , (13)
, , (13)
где  , а
, а  желаемое перерегулирование датчика в %.
желаемое перерегулирование датчика в %.
Если входной сигнал имеет и линейную составляющую (тогда его  ), то необходимо полагать
), то необходимо полагать  , а передаточную функцию датчика также брать в виде (13). Значения обычно лежат в пределах от 10% до 35% [29, 30]. При этом необходимо иметь в виду, что с уменьшением значения увеличивается порядок (сложность) АБДК в особенности при . Значения порядка АБДК при и различных значениях и q приведены в таблице 1.
, а передаточную функцию датчика также брать в виде (13). Значения обычно лежат в пределах от 10% до 35% [29, 30]. При этом необходимо иметь в виду, что с уменьшением значения увеличивается порядок (сложность) АБДК в особенности при . Значения порядка АБДК при и различных значениях и q приведены в таблице 1.
Таблица 1
Порядок АБДК при vдат = 2
|
Если требуется обеспечить первый порядок астатизма (), то можно полагать значение постоянного перерегулирования любым в указанных выше пределах, но и в этом случае с увеличением значения q порядок датчика увеличивается. Минимальный порядок АБДК  или
или  .
.
В тех случаях, когда  , полином в (1) берется в виде (3); при этом порядок АБДК также находится путем решения уравнения (2) при заданном значении q, но одним из итерационных методов [31, 35]. Перерегулирование определяется в процессе решения уравнения (2).
, полином в (1) берется в виде (3); при этом порядок АБДК также находится путем решения уравнения (2) при заданном значении q, но одним из итерационных методов [31, 35]. Перерегулирование определяется в процессе решения уравнения (2).
Рассмотрим конкретный пример построения датчика, реализующего заявляемый способ снижения его структурной погрешности. Пусть требуется найти передаточную функцию датчика (фиг. 3), который должен иметь: порядок астатизма  , постоянное перерегулирование
, постоянное перерегулирование  , период
, период  с, при задержке по времени в ЧЭ 2 и АЦИ 3
с, при задержке по времени в ЧЭ 2 и АЦИ 3  , т.е. при
, т.е. при  . Так как , , то по таблице 1 находим
. Так как , , то по таблице 1 находим  , а по формуле (13) при
, а по формуле (13) при  и получим искомую передаточную функцию датчика:
и получим искомую передаточную функцию датчика:
 . (14)
. (14)
На чертежах фиг. 4 и фиг. 5 показаны полученные в MATLAB графики изменения выходной переменной  цифрового датчика (фиг. 3) с найденной передаточной функцией (14) при его входных переменных
цифрового датчика (фиг. 3) с найденной передаточной функцией (14) при его входных переменных 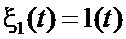 и
и  при Т = 0,5 с. По этим рисункам легко заключить, что:
при Т = 0,5 с. По этим рисункам легко заключить, что:
- датчик фиг. 3 имеет перерегулирование 20%;
- переходный процесс длится ровно 9 секунд, т.е. 18Т;
- ошибки датчика, несмотря на наличие запаздывания, в обоих случаях равны нулю.
Таким образом, при найденной передаточной функции (14) цифровой датчик фиг. 3, реализующий предлагаемый способ снижения структурной погрешности, имеет требуемые свойства.
Отметим также, что если период работы ЧЭ 2, АЦИ 3 и АБДК 5 будет равен не 0,5с, а 0,05с, то передаточная функция датчика по-прежнему будет определяться выражением (10), но длительность переходных процессов, аналогичных показанным на чертежах фиг. 4, фиг. 5, будет равна 0,9 с.
При использовании цифрового датчика, реализующего заявляемый способ повышения точности, запаздывание может отсутствовать, быть равным одному или нескольким периодам дискретизации, но оно должно быть определенным и не изменяться в процессе функционирования датчика. При этом с увеличением запаздывания порядок цифрового датчика, как видно из таблицы 1, возрастает.
Таким образом, предложенный способ снижения структурной погрешности традиционного цифрового датчика реализуется с помощью дополнительной операции обработки сигнала на выходе АЦИ посредством АБДК с конечной длительностью переходных процессов и соответствующим порядком астатизма. При этом запаздывание в ЧЭ и АЦИ, может быть любым, но постоянным и равным целому числу периодов дискретизации [31,32].
Полученные результаты в связи с их высокой степенью обобщения могут использоваться при разработке высокоточных цифровых датчиков различных физических величин (ускорение, давление, перемещение, температура, радиация, вес, механические деформации, электрические величины и компоненты электронных схем, структура газов, химические процессы в материалах, оптические сигналы, медицинские, магнитные и электромагнитные сенсоры и т.д.) для применения в аналого-цифровых системах автоматического управления и контроля [19, 31, 32, 34, 35].
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Авт.свид. СССР № 467386, 1975 г.
2. Авт.свид. СССР 481130, 1975 г.
3. Авт.свид. СССР 723502, 1980 г.
4. Патент СССР 208003, 1968 г.
5. Авт.свид. СССР 373724, 1973 г.
6. Авт.свид. СССР 1613864, 1990 г.
7. Авт.свид. СССР 728071, 1980 г.
8. Патент SU 1831669, 1987 г.
9. Патент SU 364956, 1973 г.
10. Патент SU 1739185, 1980 г.
11. Авт.свид. СССР 458097, 1975 г.
12. Патент SU 1081548, 1984 г.
13. Патент EP 0714038, 1995 г.
14. Патент US 9320470, 2008 г.
15. Патент US 7834795, 2009 г.
16. Патент JP 5072190, 2005 г.
17. Патент CN 103101053, 2012 г.
18. Патент US 8588887, 2013 г.
19. Tsikin I.A., Discrete-Analog Signal Processing. Publishing Radio and Communications, Moscow, 1982. 161 p. (In Russian)
20. Войтович И.Д. Интеллектуальные сенсоры: Учебное пособие /И.Д. Войтович, В.М. Корсунский. – М.: Интернет-Университет Информационных Технологий; БИНОМ. Лаборатория знаний, 2012. – 624 с.: ил., табл. – (Основы информационных технологий).
21. Гайдук А.Р., Плаксиенко Е.А. Анализ и аналитический синтез цифровых систем управления: Монография.СПб.: Издательство «Лань», 2018. 272 с. ISBN 978-5-8114-2813-7.
22. Клаассен К.Б. Основы измерений. Электронные методы и приборы в измерительной технике. Москва: Постмаркет, 2002. – С. 292-294, рис. 4.15
23. Samoylov L.K. Сlassical Method of the Account of Influence Time Delays of signals in devices of Control Systems // Izv-ya SFedU. Engineering Sciences, 2016, No. 4. pp. 40 -49.
24. Прокопенко Н.Н., Гайдук А.Р., Бугакова А.В. Переходные процессы в операционном усилителе с экспоненциальной проходной характеристикой драйвера корректирующего конденсатора // Радиотехника, 2017. № 10. С. 148-153.
25. Samoylov L.K., Denisenko D.Y., Prokopenko N.N. The Function Approximation of the Signal Delay Time in the Anti-Alias Filter of the A/D Interface of the Instrumentation and Control System. 2018 IEEE International Conference on Electrical Engineering and Photonics (EExPolytech), Saint Petersburg, Russia, 2018, pp. 18-21. doi: 10.1109/EExPolytech.2018.8564413
26. Прокопенко Н.Н., Гайдук А.Р., Будяков П., Бутурлагин Н. The synthesis of the correction circuit of the high speed sensors of the physical quantities and current-voltage converters with the parasitic capacitance. Proceeding of Design & Test Symposium (EWDTS), 2014 East-West. Kiev, Ukraine, September 26-29, 2014.
27. Гайдук А.Р., Семенов А.В. Метод построения желаемых передаточных функций дискретных систем с высоким порядком астатизма // Изв. ЮФУ. Технические науки. Таганрог: Изд-во ТТИ ЮФУ. № 2, 2013. С. 14-19.
28. Gaiduk A.R., Stojković N.M. Formation of transfer function for control systems under implementation conditions // FACTA UNIVERSITATIS, Series: Automatic Control and Robotics. Vol. 13. № 1. 2014. pp.15-25.
29. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. СПб.: Профессия, 2003. 768 с
30. Ким П.Д. Теория автоматического управления. Т. 1: Линейные системы. М.: Физматлит, 2003. 288 с.
31. Гайдук А.Р. Математические методы анализа и синтеза динамических систем. Saarbrücken, Deutschland: Lap Lambert Academic Publishing, 2015. 251 c.
32. Гайдук А.Р. Непрерывные и дискретные динамические системы. М.: УМ и ИЦ «Учебная литература», 2004. 252 с.
33. Алексеенко А.Г. Основы микросхемотехники. – 3-е изд., перераб. И доп. – М.: ЮНИМЕДИАСТАЙЛ, 2002. – 448 с.
34. Волович Г.И. Схемотехника аналоговых и аналого-цифровых электронных устройств. 2-е изд., испр. – М.: Издательский дом «Додэка-XXI», 2007. – 528 с., ил.
35. Гайдук А.Р. Синтез систем автоматического управления по передаточным функциям // Автоматика и телемеханика. 1980. № 1. С. 11–16.
Способ снижения структурной погрешности цифрового датчика физической величины (1) в аналого-цифровой системе автоматического управления или контроля, содержащего чувствительный элемент (2), выход которого подключен ко входу аналого-цифрового интерфейса (3), а также выход (4) датчика, причем на чувствительный элемент (2) воздействует входной непрерывный сигнал ξ(t), описываемый полиномиальной функцией времени t и являющийся выходной переменной объекта управления или контроля, при этом чувствительный элемент (2) и аналого-цифровой интерфейс (3) формируют в моменты времени t=kT, k=q, q+1, q+2, …, на выходе аналого-цифрового интерфейса (3) запаздывающий на целое число q периодов времени T относительно входного непрерывного сигнала ξ(t), t≥0, чувствительного элемента (2) выходной дискретный сигнал ξ((k-q)T), k=q, q+1, q+2, …, и фильтруют его от шумов и помех с пренебрежимо малыми ошибками, отличающийся тем, что выходной дискретный сигнал ξ((k-q)T), k=q, q+1, q+2, …, аналого-цифрового интерфейса (3), запаздывающий на целое число q периодов времени Т относительно дискретных значений ξ(kT) входного непрерывного сигнала ξ(t) чувствительного элемента (2), обрабатывают в дополнительном астатическом быстродействующем дискретном корректоре (5), включенном между выходом аналого-цифрового интерфейса (3) и выходом (4) датчика, при этом дополнительный астатический быстродействующий дискретный корректор (5) имеет конечный переходный процесс, порядок астатизма на единицу больше, чем степень полинома, описывающего входной непрерывный сигнал ξ(t) чувствительного элемента (2) как функцию времени t, а относительный порядок передаточной функции дополнительного астатического быстродействующего дискретного корректора (5) равен единице.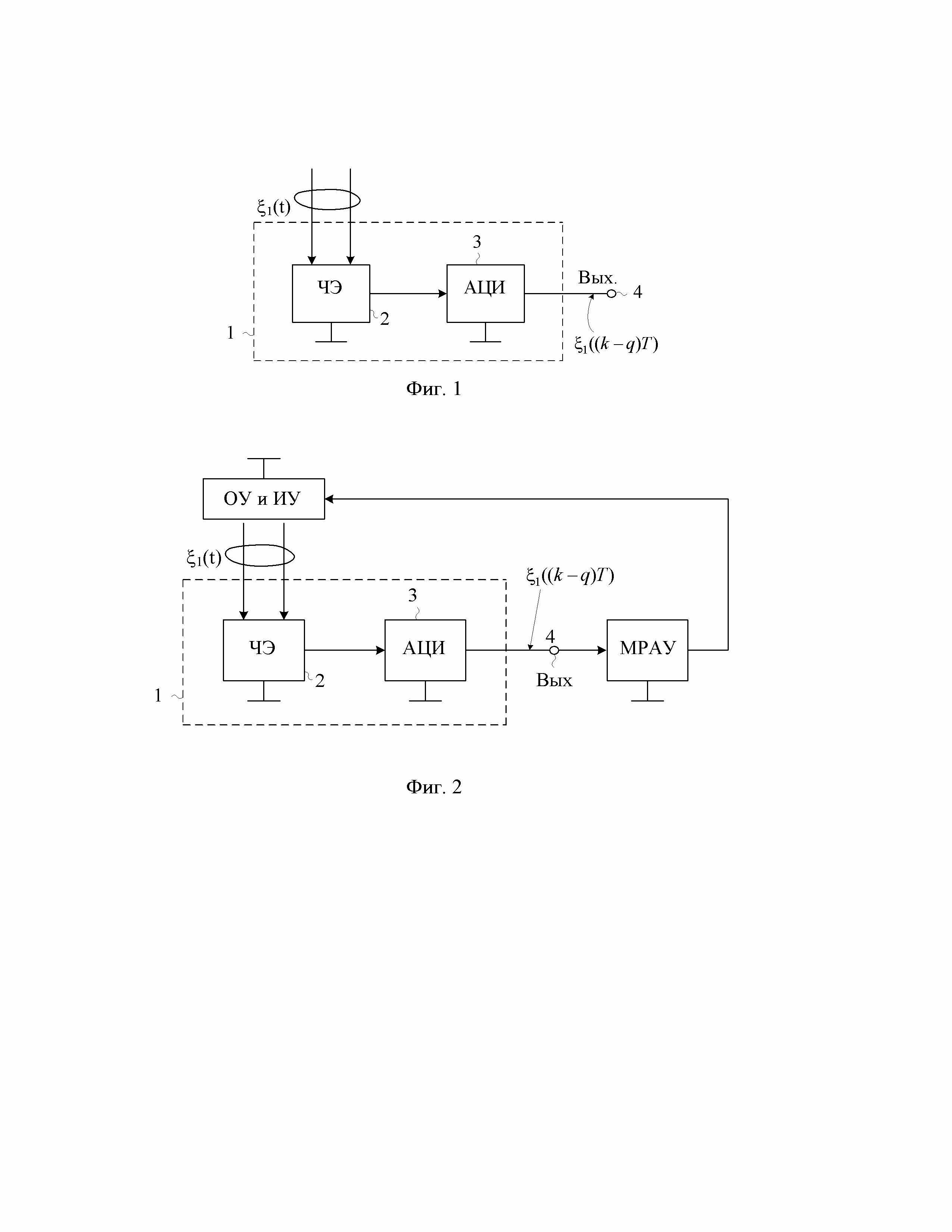
Измерительный мост с повышенным быстродействием
Асинхронный пиковый детектор
Способ определения параметров взвешенных частиц
Дифференциальный усилитель токов
Быстродействующий дифференциальный операционный усилитель
Устройство определения параметров взвешенных частиц
Способ гигротермической обработки зерна овса
Arc-фильтр нижних частот с независимой настройкой основных параметров
Дифференциальный преобразователь "напряжение-ток" с широким диапазоном линейной работы
Быстродействующий дифференциальный операционный усилитель
Дифференциальный усилитель с расширенным частотным диапазоном
Широкополосная цепь смещения статического уровня в транзисторных каскадах усиления и преобразования сигналов
Мультидифференциальный операционный усилитель с малым напряжением смещения нуля
Прецизионный операционный усилитель на основе радиационно стойкого биполярно-полевого технологического процесса
K-значный логический элемент "максимум"
Каскодный усилитель с расширенным диапазоном рабочих частот
Каскодный усилитель с расширенным частотным диапазоном
Дифференциальный усилитель на основе радиационно-стойкого биполярно-полевого технологического процесса для работы при низких температурах
Каскодный усилитель с расширенным частотным диапазоном
Свч избирательный усилитель на основе планарной индуктивности с низкой добротностью

