Результат интеллектуальной деятельности: ПОДВИЖНЫЙ АППАРАТНЫЙ ОГРАНИЧИТЕЛЬ ДЛЯ РОБОТИЗИРОВАННОГО КОМПОНЕНТА
Вид РИД
Изобретение
Уровень техники
[0001] Настоящее изобретение относится, в общем, к области робототехники. Более конкретно, варианты осуществления настоящего изобретения относится к подвижному аппаратному ограничителю для подвижного роботизированного компонента (например, роботизированной руки).
[0002] Роботизированные системы применяются во множестве технических областей, включающих в себя производство, медицину и отрасли развлечений. Например, роботизированные системы могут применять подвижные роботизированные компоненты, выполненные с возможностью облегчать сборку компонентов или систем в производственной установке. Роботизированные системы могут также включать в себя устройства управления, выполненные с возможностью ограничивать движение подвижных роботизированных компонентов по различным причинам, включающим в себя защиту роботизированной системы. В настоящее время признается, что ограничения движения, вызванные или обеспечиваемые устройством управления, могут излишне ограничивать действие или подвижность подвижного роботизированного компонента. Следовательно, устройство управления может излишне ограничивать производительность или эффективность подвижного роботизированного компонента в традиционных системах. Таким образом, необходимы улучшенные устройства управления, чтобы предоставлять возможность лучшей производительности и эффективности подвижных роботизированных компонентов.
Сущность изобретения
[0003] Ниже обобщаются конкретные варианты осуществления, согласованные по объему с первоначально заявленным предметом изобретения. Эти варианты осуществления не имеют намерение ограничивать объем раскрытия сущности, а вместо этого данные варианты осуществления имеют намерение предоставлять только краткий обзор конкретных раскрытых вариантов осуществления. Фактически, настоящее изобретение может охватывать множество форм, которые могут быть аналогичными или отличающимися от вариантов осуществления, изложенных ниже.
[0004] В соответствии с одним вариантом осуществления, роботизированная система включает в себя роботизированную руку и подвижный аппаратный ограничитель, размещенный непосредственно у роботизированной руки. Подвижный аппаратный ограничитель отделяется от роботизированной руки, по меньшей мере, одним зазором в первом рабочем состоянии. Подвижный аппаратный ограничитель физически касается роботизированной руки во втором рабочем состоянии. Роботизированная система также включает в себя один или более контроллеров, выполненных с возможностью управлять движением роботизированной руки и движением подвижного аппаратного ограничителя так, что первое рабочее состояние поддерживается, или так, что, если возникает второе рабочее состояние, аппаратный ограничитель блокирует движение роботизированной руки.
[0005] В соответствии с другим вариантом осуществления, система управления для роботизированной системы включает в себя контроллер, имеющий процессор и память, где память конфигурируется, чтобы хранить команды, которые, когда исполняются процессором, обеспечивают выполнение контроллером действий. Действия включают в себя составление карты первого пути движения для роботизированной руки роботизированной системы. Действия также включают в себя составление карты второго пути движения для подвижного аппаратного ограничителя роботизированной системы. Действия также включают в себя выполнение первого пути движения и второго пути движения, так что, во время первого рабочего состояния, зазор сохраняется между бампером роботизированной руки и точкой касания подвижного аппаратного ограничителя, и, во время второго рабочего состояния, зазор не сохраняется между бампером роботизированной руки и точкой касания подвижного аппаратного ограничителя, в результате чего, бампер и точка касания физически касаются друг друга во время второго рабочего состояния.
[0006] В соответствии с другим вариантом осуществления, роботизированная система включает в себя роботизированный элемент, имеющий элемент вытягивания руки, центрированный в центральной точке роботизированной системы. Элемент вытягивания руки также включает в себя первый бампер, размещенный на первой стороне выступа элемента вытягивания руки, и второй бампер, размещенный на второй стороне выступа элемента вытягивания руки, где выступ проходит от центрального участка элемента вытягивания руки. Роботизированная система также включает в себя подвижный аппаратный ограничитель, имеющий зубчатую рейку, центрированную, и размещенную в круговом направлении, вокруг центральной точки роботизированной системы, размещенный около центральной позиции элемента вытягивания руки и отделенный от первого бампера выступа элемента вытягивания руки первым зазором и от второго бампера выступа элемента вытягивания руки вторым зазором.
Краткое описание чертежей
[0007] Эти и другие признаки, аспекты и преимущества настоящего раскрытия сущности должны становиться более понятными после прочтения нижеприведенного подробного описания со ссылками на прилагаемые чертежи, при этом аналогичные номера ссылок представляют аналогичные части на всех чертежах, на которых:
[0008] Фиг. 1 является схематичным видом сбоку варианта осуществления производственной установки и роботизированной системы, имеющей подвижный аппаратный ограничитель, в соответствии с аспектом настоящего изобретения;
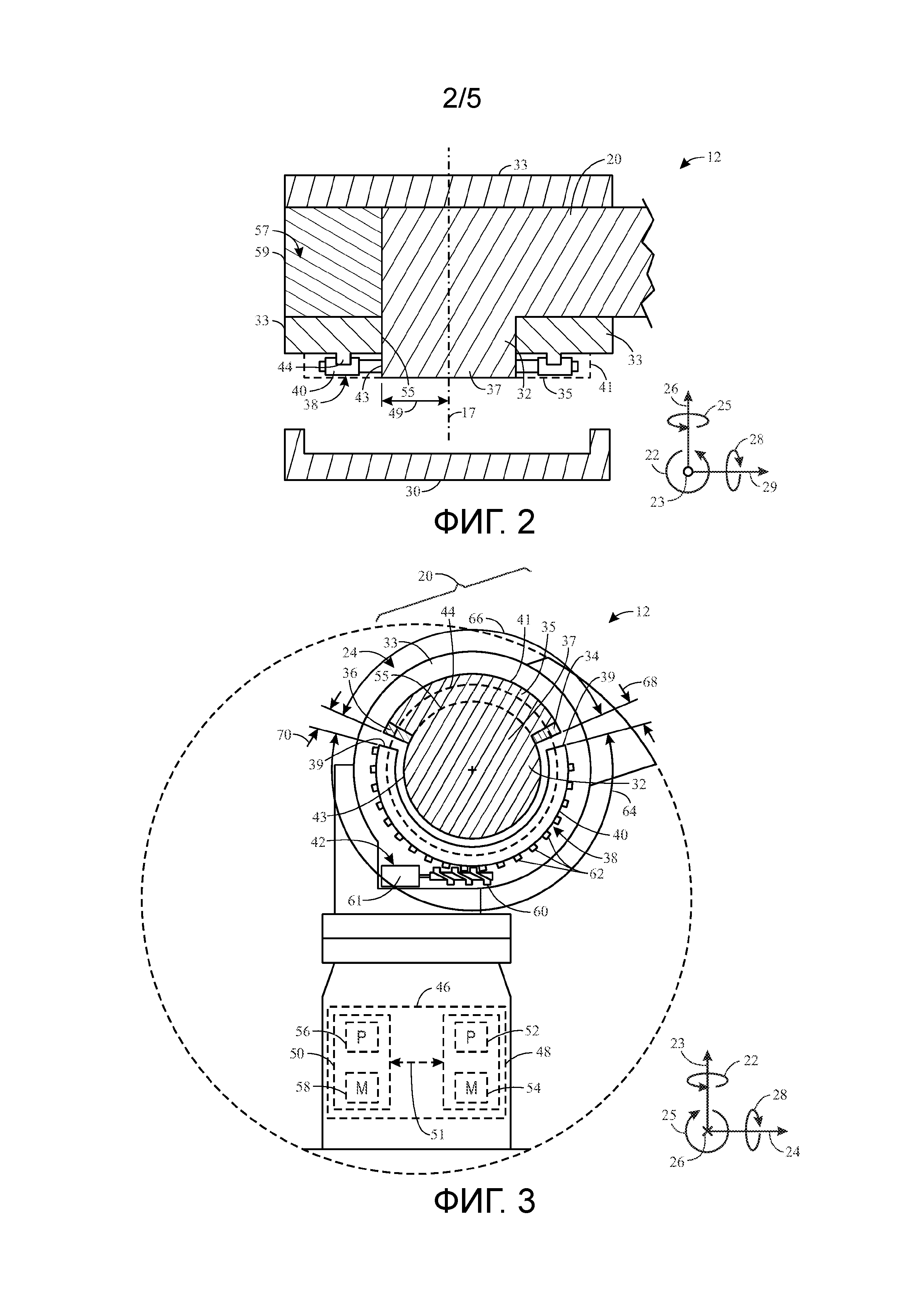
[0009] Фиг. 2 является схематичным видом сверху в разрезе для варианта осуществления роботизированной системы на фиг. 1, взятом по линии 2-2 на фиг. 1, в соответствии с аспектом настоящего изобретения;
[0010] Фиг. 3 является схематичным видом сбоку варианта осуществления подвижного аппаратного ограничителя и роботизированной руки роботизированной системы на фиг. 1, взятом по линии 3-3 на фиг. 1, в соответствии с аспектом настоящего изобретения;
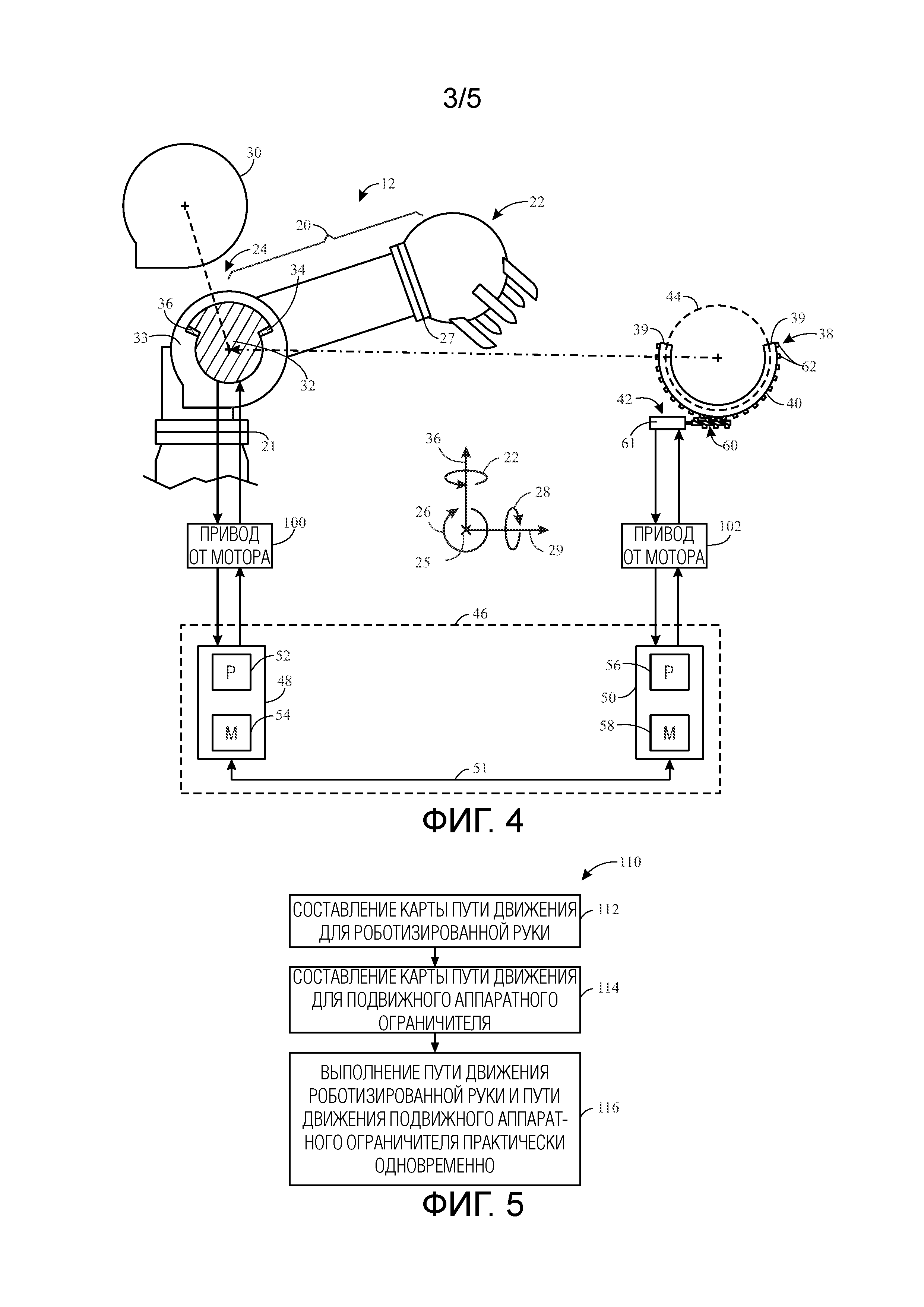
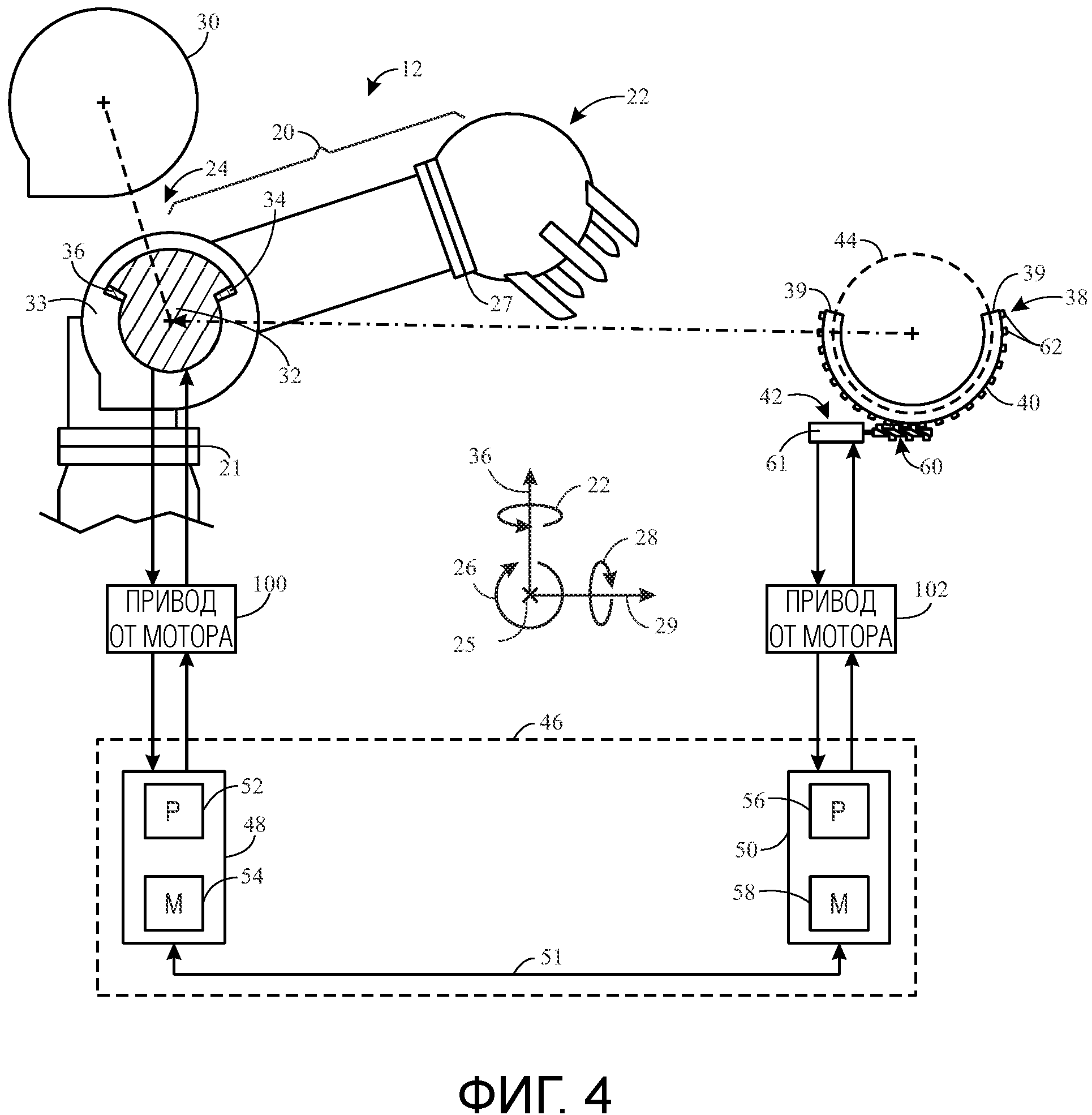
[0011] Фиг. 4 является покомпонентной схематичной иллюстрацией варианта осуществления роботизированной руки и подвижного аппаратного ограничителя на фиг. 1 и системы управления для управления роботизированной рукой и подвижным аппаратным ограничителем, в соответствии с аспектом настоящего изобретения;
[0012] Фиг. 5 является блок-схемой последовательности операций процесса, иллюстрирующей способ работы роботизированной руки, подвижного аппаратного ограничителя и системы управления на фиг. 4, в соответствии с аспектом настоящего изобретения;
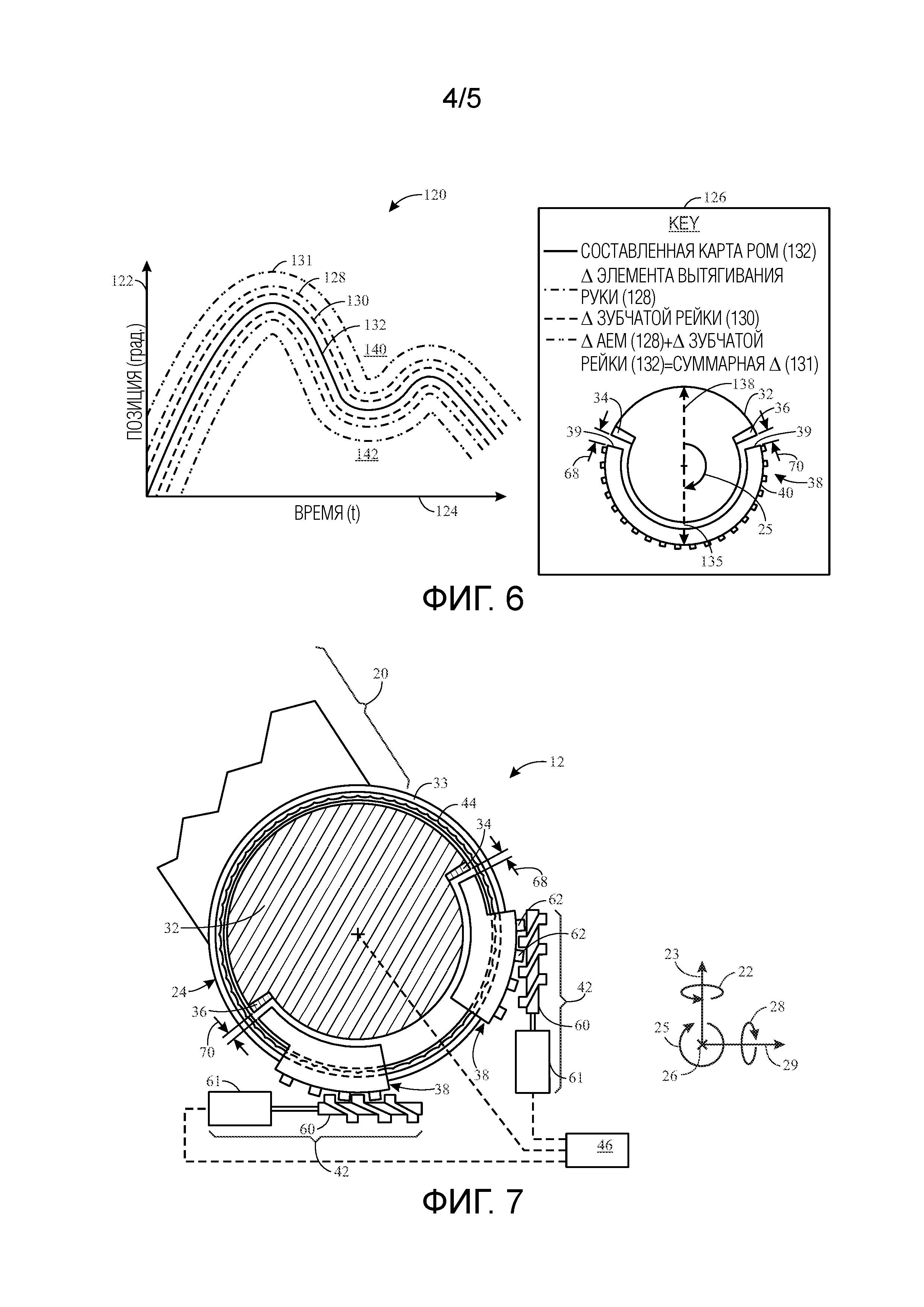
[0013] Фиг. 6 является иллюстрацией варианта осуществления графика позиции относительно времени, составленного для роботизированной руки и подвижного аппаратного ограничителя на фиг. 1, включающего в себя допустимые пределы погрешности, в соответствии с аспектом настоящего изобретения;
[0014] Фиг. 7 является схематичным видом сбоку варианта осуществления подвижных аппаратных ограничителей для роботизированной руки, в соответствии с аспектом настоящего изобретения; и
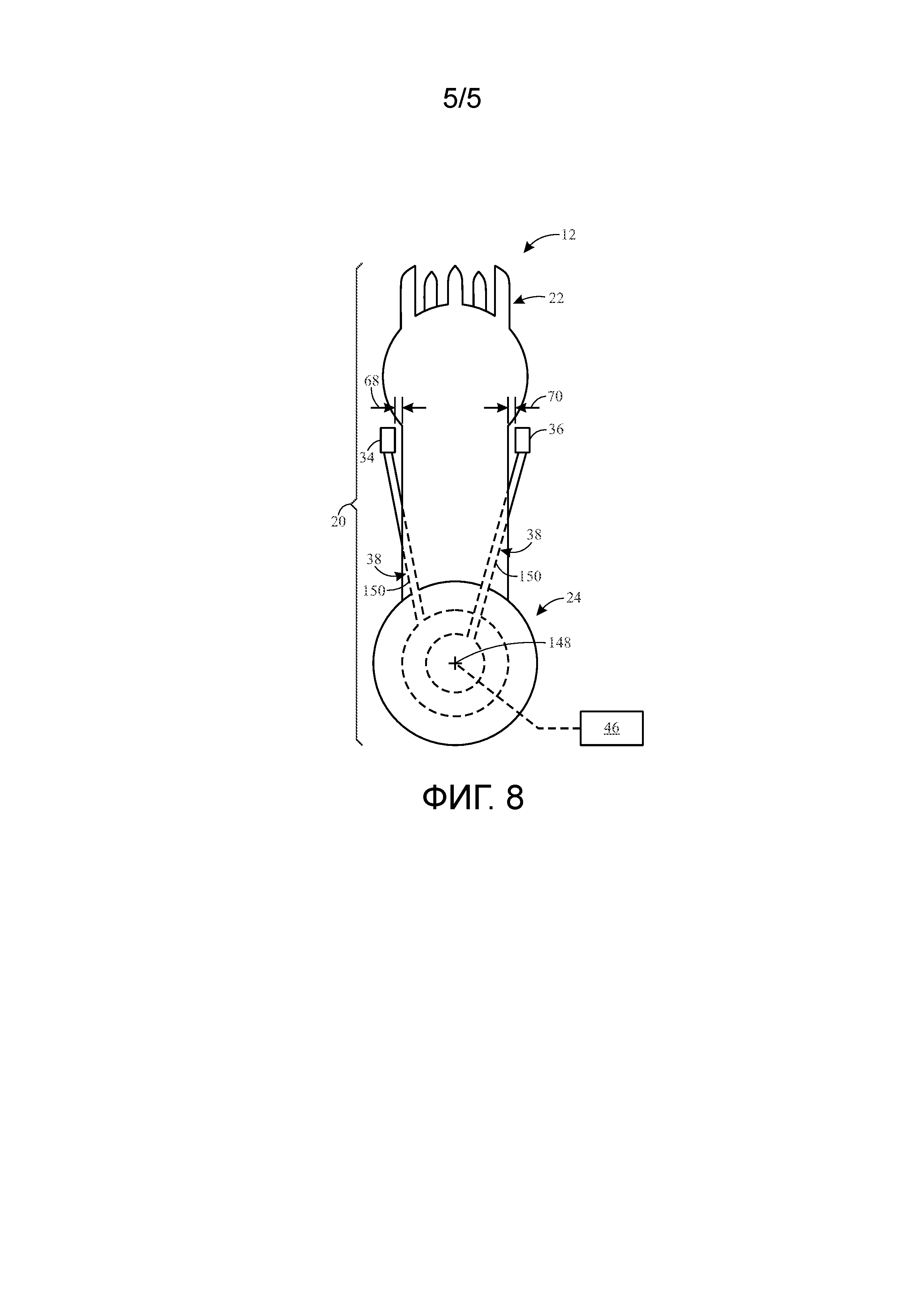
[0015] Фиг. 8 является схематичным видом сбоку варианта осуществления подвижных аппаратных ограничителей для роботизированной руки, в соответствии с аспектом настоящего изобретения.
Подробное описание изобретения
[0016] Настоящее изобретение относится к робототехнике и, более конкретно, к подвижному аппаратному ограничителю для подвижного роботизированного компонента (например, роботизированной руки) роботизированной системы. Например, подвижные роботизированные компоненты, такие как роботизированные руки, могут управляться посредством системы управления. Система управления может составлять карту пути подвижного роботизированного компонента перед, или во время, приведения в движение подвижного роботизированного компонента. Система управления может составлять карту пути, принимая во внимание предполагаемый результат перемещения подвижного роботизированного компонента, и принимая во внимание обстановку, окружающую подвижный роботизированный компонент. Например, система управления может составлять карту пути подвижного роботизированного компонента, так что роботизированный компонент взаимодействует с объектом (например, захватывает, бросает, перемещает, толкает, тянет или поднимает объект) без столкновения с другими аспектами окружающей обстановки (например, без касания стен окружающей обстановки).
[0017] В соответствии с вариантами осуществления настоящего изобретения роботизированная система может включать в себя подвижный аппаратный ограничитель, размещенный поблизости, по меньшей мере, от участка подвижного роботизированного компонента. Подвижный аппаратный ограничитель (или аппаратные ограничители) может имитировать путь подвижного роботизированного компонента, карта которого составлена посредством системы управления. Например, система управления может давать команду подвижному аппаратному ограничителю "следовать" пути подвижного роботизированного компонента, или система управления может вычислять и составлять карту отдельного пути для подвижного аппаратного ограничителя (или аппаратных ограничителей) для следования (например, на основе пути подвижного роботизированного компонента, на основе предполагаемого результата движения подвижного роботизированного компонента и/или на основе окружающей обстановки). Соответственно, если подвижный роботизированный компонент отклоняется от пути, карта которого составлена для подвижного роботизированного компонента посредством контроллера, подвижный аппаратный ограничитель может блокировать подвижный роботизированный компонент от столкновения с обстановкой, окружающей робота. Таким образом, подвижный аппаратный ограничитель (например, в противоположность неподвижному или "жесткому" компоненту) приспособлен для блокирования нежелательного движения (например, выхода из под контроля) подвижного роботизированного компонента в различных позициях, переменным образом и без ненужного ограничения объема пространства, доступного для навигации подвижным роботизированным компонентом. Другими словами, варианты осуществления настоящего изобретения могут включать в себя подвижный аппаратный ограничитель, а не фиксированный аппаратный ограничитель, так что движение роботизированной руки излишне не ограничивается (например, посредством фиксированного аппаратного ограничителя), но может все еще защищаться посредством аппаратного ограничителя (например, посредством подвижного аппаратного ограничителя).
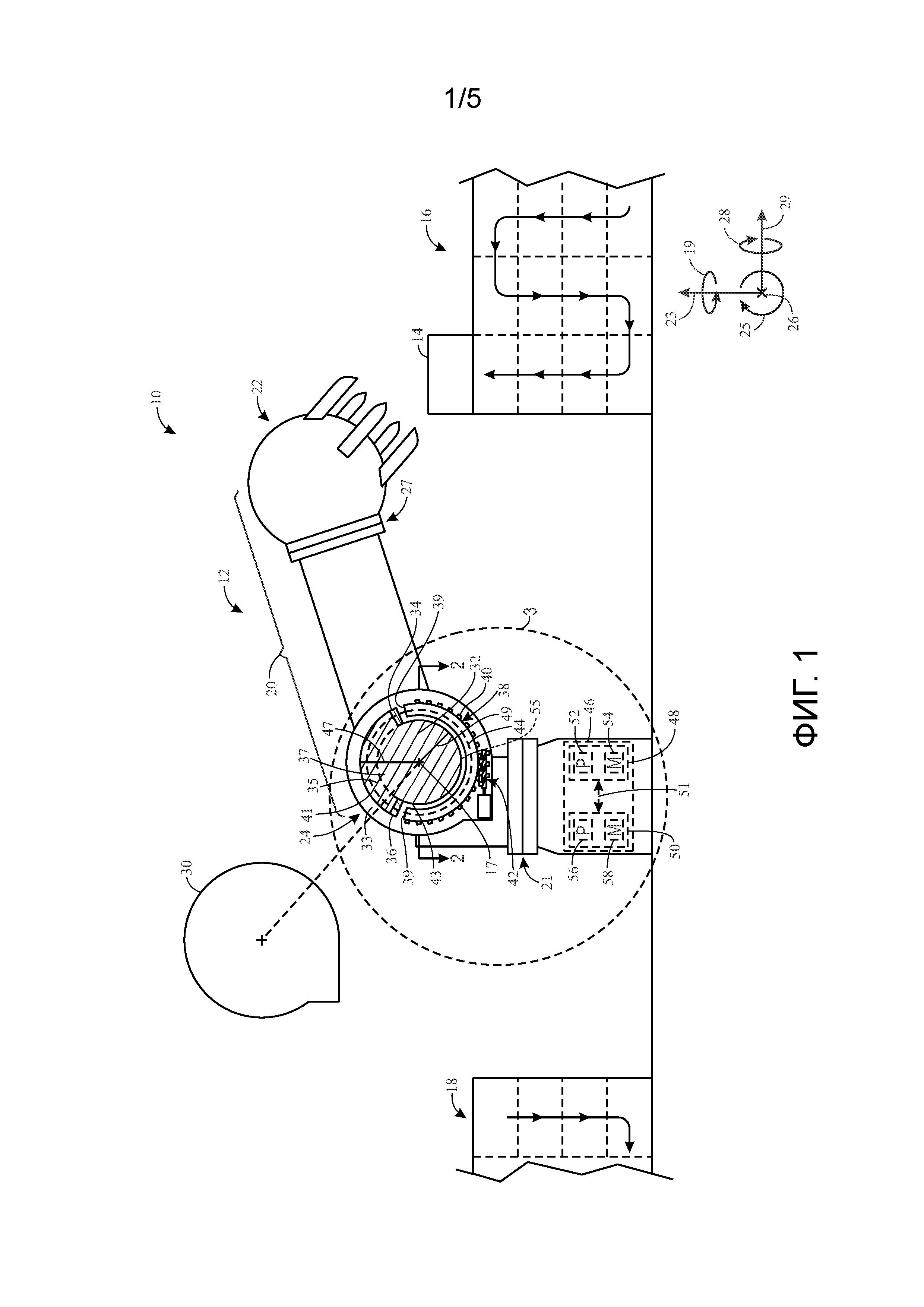
[0018] Фиг. 1 является схематичным видом сбоку варианта осуществления производственной установки 10 и роботизированной системы 12, размещенной на производственной установке 10. В иллюстрированном варианте осуществления роботизированная система 12 может быть выполнена с возможностью перемещать объект 14 из одной позиции (например, конвейерная система 16) в другую позиции (например, конвейерная система 18). Например, роботизированная система 12 может включать в себя роботизированную руку 20, имеющую захватывающий механизм 22, выполненный с возможностью захватывать и перемещать объект 14. Роботизированная рука 20 может быть поворотной, посредством первого соединения 21, в первом круговом направлении 19 (например, проходящим кольцеобразно вокруг первой оси 23). Роботизированная рука 20 может также быть поворачиваемой, посредством второго соединения 24, во втором круговом направлении 25 (например, проходящем кольцеобразно вокруг второй оси 26). Дополнительно, захватывающий механизм 22 роботизированной руки 20 может быть поворачиваемым, посредством третьего соединения 27, в третьем круговом направлении 28 (например, проходящем кольцеобразно вокруг оси 29). Соответственно, посредством первого, второго и третьего соединений 21, 24, 27, роботизированная рука 20 может быть приспособлена для подъема объекта 14 с первой конвейерной ленты 16, поворота и помещения объекта 14 на вторую конвейерную систему 18. Следует отметить, что второе соединение 24 и соответствующие отличительные признаки будут описаны подробно ниже, но что те же или аналогичные признаки и функциональность могут быть дополнительно или альтернативно применены к первому и/или третьему соединениям 21, 27. Другими словами, дополнительное количество или меньшее количество таких соединений может быть использовано.
[0019] Как показано в иллюстрированном примере, второе соединение 24 может включать в себя крышку 30, выполненную с возможностью окружать компоненты второго соединения 24. Например, крышка 30 может быть размещена над компонентом 32 вытягивания руки для роботизированной руки 20, где элемент 32 вытягивания руки жестко соединяется с роботизированной рукой 20 и может придавать движение роботизированной руке 20, вращаясь вокруг продольной оси 17, проходящей через элемент 32 вытягивания руки (например, параллельно с направлением 26 в иллюстрированном варианте осуществления). Например, элемент 32 вытягивания руки может быть, в целом, цилиндрическим и может вращаться вокруг продольной оси 17 (например, в круговом направлении 25). Например, роботизированная рука 20 может быть жестко соединена с элементом 32 вытягивания руки и может проходит наружу от элемента 32 вытягивания руки. Соответственно, когда элемент 32 вытягивания руки поворачивается в круговом направлении 25 вокруг продольной оси 17 элемента 32 вытягивания руки, роботизированная рука 20, проходящая от него, может также поворачиваться вокруг продольной оси 17 элемента 32 вытягивания руки (например, в круговом направлении 25). Таким образом, захватывающий элемент 22, расположенный на дальнем конце роботизированной руки 20, может поворачиваться вокруг продольной оси 17, тем самым, обеспечивая перемещение каких-либо объектов (например, объекта 14), захваченных посредством захватывающего элемента 22.
[0020] Как показано, второе соединение 24 может также включать в себя неподвижное основание 33, которое жестко не соединяется с элементом 32 вытягивания руки или с роботизированной рукой 20. Другими словами, когда элемент 32 вытягивания руки и роботизированная рука 20, жестко соединенная с ним, поворачиваются вокруг продольной оси 17, неподвижное основание 33 остается неподвижным. Например, неподвижное основание 33 может включать в себя отверстие 55, проходящее в направлении 26, через которое проходит элемент 32 вытягивания руки (или его участок). Соответственно, элемент 32 вытягивания руки может поворачиваться в отверстии 55 неподвижного основания 33 без нежелательного упора в неподвижное основание 33. Другими словами, неподвижное основание 33 может не касаться элемента 32 вытягивания руки таким способом, что блокирует поворот элемента 32 вытягивания руки в круговом направлении 25. Следует отметить, что отверстие 55 в неподвижном основании 33 является скрытым (и показано штриховой линией) иллюстрированным элементом 32 вытягивания руки, но будет показано и описано подробно со ссылкой на последующие чертежи. Следует также отметить, что, в то время как элемент 32 вытягивания руки, в целом, является цилиндрическим в иллюстрированном варианте осуществления, элемент 32 вытягивания руки может быть прямоугольным, квадратным, треугольным или любой другой желаемой формы. Соответствующее отверстие 55 в неподвижном основании 33 (например, через которое проходит элемент 32 вытягивания руки) может быть любой формы и/или размера, которые предоставляют возможность перемещения элемента 32 вытягивания руки относительно неподвижного основания 33, через которое проходит отверстие 55.
[0021] В соответствии с настоящими вариантами осуществления, роботизированная система 12 может включать в себя элементы, выполненные с возможностью блокировать нежелательное движение (например, выход из-под контроля) роботизированной руки 20. Например, как показано, элемент 32 вытягивания руки включает в себя выступ 35, проходящий от центрального участка 37 элемента 32 вытягивания руки. Центральный участок 37 может быть, в целом, цилиндрическим и может проходить через отверстие 55 в неподвижном основании 33. Выступ 35 может быть дугообразной формой, проходящей от центрального участка 37. Дополнительно, выступ 35 может быть расположена на элементе 32 вытягивания руки снаружи от неподвижного основания 33 (например, относительно направления 26) и, более конкретно, наружу от отверстия 55 в неподвижном состоянии 33, через которое проходит центральный участок 37. Другими словами, выступ 35 может включать в себя первый круговой участок 41, имеющий первый радиус 47, который больше второго радиуса 49 второго кругового участка 43 центрального участка 37. Отверстие 55 в неподвижном основании 33, через которое проходит центральный участок 37 элемента 32 вытягивания руки, может иметь размер, только чтобы вмещать второй круговой участок 43 центрального участка 37 (например, первый радиус 47 первого кругового участка 41 выступа 35 может быть больше радиуса отверстия 55 в неподвижном основании 33). Таким образом, выступ 35, имеющая первый круговой участок 41 с первым радиусом 47 больше второго радиуса 49 второго кругового участка 43 центрального участка 37, может быть расположен только на элементе 32 вытягивания руки снаружи от неподвижного основания 33 (например, от отверстия 55 в неподвижном основании 33), относительно направления 26 (например, снаружи отверстия 55, проходящего через неподвижное основание 33).
[0022] Как показано, выступ 35, проходящая от центрального участка 37, может включать в себя первый бампер 34 и второй бампер 36, расположенный на ней. Например, первый и второй бамперы 34, 36 проходить между первым круговым участком 41 выступа 35 и вторым круговым участком 43 центрального участка 37. Другими словами, первый и второй бамперы 34, 36 располагаются на противоположных сторонах выступа 35. Однако, в другом варианте осуществления (например, когда элемент 32 вытягивания руки формируется по-другому), элемент 32 вытягивания руки может включать в себя только один бампер, как противоположность иллюстрированным первому и второму бамперам 34, 36.
[0023] Роботизированная система 12 также включает в себя подвижный аппаратный ограничитель 38, имеющий зубчатую рейку 40, которая вращается вокруг продольной оси 17 (например, в круговом направлении 25) относительно неподвижного основания 33 второго соединения 24. Например, в иллюстрированном варианте осуществления подвижный аппаратный ограничитель 38 включает в себя зубчатую рейку 40, зубчатый валик 42 и рельс 44. Рельс 44 проходит в круговом направлении 25 (например, вокруг продольной оси 17 элемента 32 вытягивания руки) и может быть расположен (например, жестко присоединен) на неподвижном основании 33 или может быть иначе объединен в роботизированную систему 12, так что рельс 44 остается неподвижным во время работы роботизированной системы 12. Зубчатая рейка 40 устанавливается на рельс 44 и конфигурируется, чтобы двигаться по рельсу 44 (например, в круговом направлении 25 и вокруг продольной оси 17). Зубчатый валик 42 может быть, например, винтовым элементом, который, когда вращается, придает вращательное движение зубчатой рейке 40 (например, вынуждая зубчатую рейку 40 двигаться по рельсу 44 и в круговом направлении 25 вокруг продольной оси 17). Например, когда зубчатый валик 42 вращается в третьем круговом направлении 28, зубцы или нити резьбы (например, спиралевидные нити резьбы) зубчатого валика 42 зацепляют зубцы зубчатой рейки 40, вынуждая зубчатую рейку 40 вращаться во втором круговом направлении 25 (например, вокруг продольной оси 17 элемента 32 вытягивания руки) и вдоль рельса 44.
[0024] В целом, как описано подробно ниже, подвижный аппаратный ограничитель 38 может управляться так, что зубчатая рейка 40 следует (например, имитирует) за движением элемента 32 вытягивания руки во время нормальных рабочих состояний. Таким образом, во время нормальных рабочих состояний, зубчатая рейка 40 не будет касаться какого-либо из бамперов 34, 36, размещенных на выступе 35 элемента 32 вытягивания руки. Однако, роботизированная система 12 может давать команду роботизированной руке 20 действовать нежелательно, что может называться нежелательными рабочими состояниями. Например, сбои программного обеспечения в контроллере роботизированной системы 12 могут давать команду роботизированной руке 20 следовать по непредназначенному пути. Во время нежелательных рабочих состояний какой-либо из бамперов 34, 36, размещенных на выступе 35 элемента 32 вытягивания руки, может касаться зубчатой рейки 40 подвижного аппаратного ограничителя 38, и зубчатая рейка 40 может затем блокировать вращение элемента 32 вытягивания руки. Другими словами, если роботизированная рука 20 и соответствующий элемент 32 вытягивания руки вращаются нежелательным образом (например, относительно желательного пути, который включает в себя временные рамки движения), один из бамперов 34, 36 элемента 32 вытягивания руки может касаться зубчатой рейки 40 (например, вдоль одной или более точек 39 касания зубчатой рейки 40) подвижного аппаратного ограничителя 38, блокируя нежелательное движение элемента 32 вытягивания руки и, таким образом, роботизированной руки 20, жестко присоединенной к нему. Следует отметить, однако, что бамперы 34, 36 (или единственный бампер) могут быть помещены, позиционированы или расположены в роботизированной системе 12 способом, отличным от способа, который показан в иллюстрированном варианте осуществления, и что термин "бампер", используемый в данном документе, ссылается на точку на роботизированной руке 20 (или соответствующем элементе 32 вытягивания руки), которой может касаться зубчатая рейка 40 подвижного аппаратного ограничителя.
[0025] В иллюстрированном варианте осуществления подвижный аппаратный ограничитель 38 может принудительно блокировать движение роботизированной руки 20, если подвижный аппаратный ограничитель 38 касается какого-либо из бамперов 34, 36. В другом варианте осуществления бамперы 34, 36 могут включать в себя датчики, расположенные в них или на них, и датчики могут обнаруживать непосредственное приближение (или соприкосновение) между одним из бамперов 34, 36 и подвижным аппаратным ограничителем 38. Если непосредственное приближение или соприкосновение обнаруживается, система управления может останавливать движение роботизированной руки 20. Система управления может также отвечать за определение и выполнение движения роботизированной руки 20, подвижного аппаратного ограничителя 38 или обоих.
[0026] Например, в иллюстрированном варианте осуществления, роботизированная система 12 включает в себя систему 46 управления, имеющую контроллер 48 руки и контроллер 50 аппаратного ограничителя. В другом варианте осуществления, контроллер 48 руки и контроллер 50 аппаратного ограничителя могут быть объединены в единый контроллер системы 46 управления. Как показано, контроллер 48 руки включает в себя процессор 52 и память 54, а контроллер 50 аппаратного ограничителя также включает в себя процессор 56 и память 58. Каждая память 54, 58 может быть выполнена с возможностью хранить исполняемые команды, которые, когда исполняются соответствующим процессором 52, 56, дают команду соответствующему контроллеру 48, 50 выполнять некоторые действия. Например, память 54 контроллера 48 руки может включать в себя команды, которые, когда исполняются процессором 52, дают команду контроллеру 48 руки (или его процессору 52) составлять карту пути роботизированной руки 20 (которая, в некоторых вариантах осуществления, включает в себя движение захватывающего механизма 22). Процессор 52 может составлять карту пути роботизированной руки 20, принимая во внимание множество факторов. Например, процессор 52 может составлять карту пути роботизированной руки 20 на основе предполагаемого результата пути. Предполагаемый результат пути, карта которого составлена посредством контроллера 48 руки, в иллюстрированном варианте осуществления, должен предоставлять возможность роботизированной руке 20 захватывать объект 14 с первой конвейерной системы 16 и доставлять объект 14, и помещать объект 14, на вторую конвейерную систему 18.
[0027] Дополнительно, память 58 контроллера 50 аппаратного ограничителя может включать в себя команды, которые, когда исполняются процессором 56, дают команду контроллеру 50 аппаратного ограничителя (или его процессору 56) составлять карту пути подвижного аппаратного ограничителя 38. Например, карта пути подвижного аппаратного ограничителя 38 может быть составлена так, что подвижный аппаратный ограничитель 38 поворачивается аналогично, или вместе, с предполагаемым путем элемента 32 вытягивания руки. Более конкретно, контроллер 50 аппаратного ограничителя (или его процессор 56) может составлять карту пути подвижного аппаратного ограничителя 38 на основе предполагаемого пути, карта которого составлена для роботизированной руки 20 (или соответствующего элемента 32 вытягивания руки), и может давать команду зубчатому валику 42 поворачиваться с конкретной скоростью и в конкретном направлении (например, в или противоположно второму круговому направлению 25), чтобы вынуждать подвижный аппаратный ограничитель 38 следовать пути. В иллюстрированном варианте осуществления контроллер 50 аппаратного ограничителя и контроллер 48 руки соединяются с возможностью обмена данными, как показано стрелкой 51. Соответственно, контроллер 48 руки может сообщать, контроллеру 50 аппаратного ограничителя, путь или предполагаемый путь, карта которого составлена для роботизированной руки 20 (и, таким образом, соответствующего элемента 32 вытягивания руки). Контроллер 50 аппаратного ограничителя может принимать, от контроллера 48 руки, путь, карта которого составлена для роботизированной руки 20, и может затем составлять карту пути для подвижного аппаратного ограничителя 38 на основе пути, карта которого составлена для роботизированной руки 20. В некоторых вариантах осуществления контроллер 48 руки и контроллер 50 аппаратного ограничителя могут составлять карту путей роботизированной руки 20 и подвижного аппаратного ограничителя 38, соответственно, отдельно друг от друга и полностью на основе предполагаемого результата путей и окружающей обстановки производственной установки 10. В том или другом варианте осуществления, если роботизированная рука 20 (и соответствующий элемент 32 вытягивания руки) отклоняется от пути, карта которого составлена посредством контроллера 48 руки (например, вследствие сбоя программного обеспечения, выхода из-под контроля или по другим причинам), подвижный аппаратный ограничитель 38 может блокировать движение роботизированной руки 20, когда один из бамперов 34, 36 элемента 32 вытягивания руки для роботизированной руки 20 касается подвижного аппаратного ограничителя 38. Другими словами, подвижный аппаратный ограничитель 38 (например, одна из точек 39 соприкосновения зубчатой рейки 40 подвижного аппаратного ограничителя 38) может физически касаться одного из бамперов 34, 36 элемента 32 вытягивания руки для роботизированной руки 20.
[0028] Чтобы дополнительно иллюстрировать роботизированную руку 20, элемент 32 вытягивания руки и неподвижное основание 33, имеющее отверстие 55, через которое проходит элемент 32 вытягивания руки, схематичный вид сверху в разрезе варианта осуществления роботизированной системы 12, взятый по линии 2-2 на фиг. 1, показан на фиг. 2. В иллюстрированном варианте осуществления, как ранее описано, неподвижное основание 33 включает в себя отверстие 55, через которое проходит центральный участок 37 элемента 32 вытягивания руки. Например, второй радиус 49 второго кругового участка 43, согласующегося с центральным участком 37 элемента 32 вытягивания руки, может быть практически таким же, или меньше, радиуса отверстия 55 сквозь неподвижное основание 33. Соответственно, центральный участок 37 элемента 32 вытягивания руки может вращаться в отверстии 55 в неподвижном основании 33 без деталей неподвижного основания 33, блокирующих вращательное движение (например, вокруг продольной оси 17 и в круговом направлении 25) элемента 32 вытягивания руки (и роботизированной руки 20, соединенной с ним). Следует отметить, что неподвижное основание 33 может также включать в себя полость 57, которая также обеспечивает вращательное движение роботизированной руки 20 вокруг продольной оси 17 и в круговом направлении 25. Неподвижное основание 33 может включать в себя нижний участок 59, над которым размещается полость 57.
[0029] Как показано, неподвижное основание 33 может включать в себя рельс 44 подвижного аппаратного ограничителя 38, соединенный с ним. Следует отметить, что рельс 44 может считаться компонентом подвижного аппаратного ограничителя 38, несмотря на тот факт, что рельс 44 является неподвижным. Например, как ранее описано, зубчатая рейка 40 подвижного аппаратного ограничителя 38 может быть соединена с возможностью вращения с рельсом 44, так что рельс 44 остается неподвижным, а зубчатая рейка 40 вращается, в круговом направлении 25, относительно рельса 44 и вокруг продольной оси 17. Соответственно, зубчатая рейка 40 может имитировать движение элемента 32 вытягивания руки. Благодаря иллюстрированной перспективе, выступ 35 является невидимой в иллюстрированном варианте осуществления (например, выступ 35 размещается выше иллюстрированного сечения). Однако, выступ 35 представляется пунктирными линиями и, как показано, должна размещаться полностью снаружи отверстия 55 в неподвижном основании 33. Соответственно, выступ 35 не блокирует движение элемента 32 вытягивания руки, касаясь неподвижного основания 33; скорее, если элемент 32 вытягивания руки и соответствующая выступ 35 вращаются по нежелательному пути, как ранее описано, зубчатая рейка 40 может касаться выступа 35, таким образом, блокируя движение выступа 35, соответствующего элемента 32 вытягивания руки и соответствующей роботизированной руки 20.
[0030] Обращаясь теперь к фиг. 3, показан схематичный вид сбоку варианта осуществления подвижного аппаратного ограничителя 38 и соединения 24, имеющего элемент 32 вытягивания руки для роботизированной руки 20 на фиг. 1, взятый по линии 3-3 на фиг. 1. Как ранее описано, элемент 32 вытягивания руки (или, более конкретно, центральный участок 37 элемента 32 вытягивания руки) проходит сквозь неподвижное основание 33 (например, отверстие 55 неподвижного основания 33, как иллюстрировано на фиг. 2) второго соединения 24 роботизированной системы 12. Дополнительно, элемент 32 вытягивания руки может быть жестко соединен, или объединен, с роботизированной рукой 20.
[0031] Как ранее описано, подвижный аппаратный ограничитель 38 включает в себя зубчатый валик 42 и зубчатую рейку 40 (например, имеющую зубцы 62), установленную на рельсе 44, где рельс 44, например, может быть неподвижным и установленным на неподвижном основании 33 роботизированной системы 12. Зубчатый валик 42 в иллюстрированном варианте осуществления включает в себя ходовой винт 60, установленный на нем (например, проходящийся от мотора 61 зубчатого валика 42), где ходовой винт 60 зацепляет зубцы 62 зубчатой рейки 40. В другом варианте осуществления зубчатый валик 42 может включать в себя другой тип винта, зубцы или любой другой механизм зацепления, подходящий для зацепления зубцов 62 зубчатой рейки 40, чтобы приводить зубчатую рейку 40 во вращение в (или противоположно) втором круговом направлении 25. Контроллер 50 аппаратного ограничителя системы 46 управления может составлять карту пути подвижного аппаратного ограничителя 38 на основе пути роботизированной руки 20 (и соответствующего элемента 32 вытягивания руки), карта которого составлена для роботизированной руки 20 посредством контроллера 48 руки. В действительности, в некоторых вариантах осуществления, контроллер 48 руки может сообщать путь, карта которого составлена для роботизированной руки 20, контроллеру 50 аппаратного ограничителя, и контроллер 50 аппаратного ограничителя может составлять карту пути подвижного аппаратного ограничителя 38 на основе (или, по меньшей мере, частично) пути роботизированной руки 20. Контроллер 50 аппаратного ограничителя и контроллер 48 руки могут затем выполнять пути с составленной картой для подвижного аппаратного ограничителя 38 и роботизированной руки 20 (и соответствующего элемента 32 вытягивания руки), соответственно.
[0032] Как показано, зубчатая рейка 40 подвижного аппаратного ограничителя 38 включает в себя дугообразный отрезок 64, проходящийся в круговом направлении 25. Выступ 35 элемента 32 вытягивания руки также включает в себя дугообразный отрезок 66, проходящийся в круговом направлении 25. Дополнительно, зазоры 68, 70 существуют (например, которые изменяются в пределах допусков нормальных рабочих состояний) между зубчатой рейкой 40 и обоими бамперами 34, 36 выступа 35 элемента 32 вытягивания руки. Другими словами, во время нормальных рабочих условий, первый зазор 68 существует между зубчатой рейкой 40 и бампером 34, а второй зазор 70 существует между зубчатой рейкой 40 и бампером 36. Однако, как ранее описано, роботизированная рука 20 может двигаться, в некоторых рабочих состояниях (например, вследствие проблем программного обеспечения или по другим причинам), так что один из бамперов 34, 36 элемента 32 вытягивания руки касается зубчатой рейки 40. Таким образом, в некоторых рабочих состояниях, один из зазоров 68, 70 может быть уменьшен до нуля, когда соответствующий бампер 34, 36 касается зубчатой рейки 40. Следует отметить, что, в некоторых вариантах осуществления, первый зазор 68 и второй зазор 70 могут быть, или могут рассматриваться, как единый зазор в целях обсуждения. Следует также отметить, что, во время работы, размер каждого зазора 68, 70 может колебаться, когда зубчатая рейка 40 и элемент 32 вытягивания руки двигаются. Соответственно, "зазор" не ссылается на точный показатель, а скорее на какое-либо пространство между зубчатой рейкой 40 и бамперами 34, 36. Колебание в размерах зазоров 68, 70 может быть результатом допустимых пределов погрешности, как обсуждается подробно ниже со ссылкой на последующие чертежи, которые согласуются с физическими ограничениями роботизированной системы 12. Например, зубчатая рейка 40 и элемент 32 вытягивания руки могут двигаться шагами приращения, которые включают в себя не бесконечно малые размеры шагов. Таким образом, во время работы роботизированной системы 12, размеры зазоров 68, 70 могут изменяться.
[0033] Продолжая с иллюстрированным вариантом осуществления, зазоры 68, 70 могут иметь размер, чтобы включать в себя дугообразные отрезки (например, проходящие в круговом направлении 25) на основе допустимых пределов погрешности, ассоциированных с путями с составленной картой для элемента 32 вытягивания руки и подвижного аппаратного ограничителя 38. Например, допустимые пределы погрешности могут соответствовать механическим ограничениям роботизированной системы 12, в результате чего, зубчатая рейка 40 и подвижный аппаратный ограничитель 38 могут быть приспособлены только для того, чтобы следовать соответствующим путям с составленной картой для зубчатой рейки 40 и подвижного аппаратного ограничителя 38 до некоторой степени точности на основе вышеупомянутых механических ограничений (например, ограничений размера шага движения, придаваемого зубчатой рейке 40 и элементу 32 вытягивания руки). Например, зазоры 68, 70 могут иметь размер, чтобы быть достаточно большими, чтобы вмещать перемещение элемента 32 вытягивания руки, подвижного аппаратного ограничителя 38 или обоих в допустимые пределы погрешности элемента 32 вытягивания руки, подвижного аппаратного ограничителя 38 или обоих, описанные выше. Таким образом, подвижный аппаратный ограничитель 38 не будет блокировать перемещение элемента 32 вытягивания руки (и, таким образом, роботизированной руки 20), пока элемент 32 вытягивания руки (и, таким образом, роботизированная рука 20) и/или зубчатая рейка 40 подвижного аппаратного ограничителя 38 перемещаются в допустимых пределах погрешности для элемента 32 вытягивания руки (и, таким образом, роботизированной руки 20).
[0034] Дополнительно, круговые размеры 64, 66 зубчатой рейки 40 и элемента 32 вытягивания руки (например, проходящие между бамперами 34, 36 элемента вытягивания руки) могут иметь размер, чтобы вмещать желаемый диапазон перемещения роботизированной руки 20 в круговом направлении 25. Например, поскольку ходовой винт 60 зубчатого валика 42 только вращается и не перемещается в стороны (например, в направлениях 23, 26 и 29), ходовой винт 60 может лишь придавать вращение зубчатой рейке 40, если зубцы 62 зубчатой рейки 40 находятся в позиции, которой должен касаться (и, таким образом, находятся в физической близости к) ходовой винт 60 зубчатого валика 42. Другими словами, диапазон движения зубчатой рейки 40 заканчивается, когда зубчатая рейка 40 больше не позиционируется над ходовым винтом 60. Соответственно, диапазон перемещения зубчатой рейки 40 подвижного аппаратного ограничителя 38 ограничивается дугообразным отрезком 64 зубчатой рейки 40. Однако, зубчатая рейка 40 должна также быть приспособлена для касания бамперов 34, 38 элемента 32 вытягивания руки; таким образом, может быть, по меньшей мере, некоторое не ничтожно малое расстояние 66 элемента 32 вытягивания руки между бамперами 34, 38. Чтобы предоставлять возможность улучшенного диапазона движения подвижного аппаратного ограничителя 38 (и, таким образом, улучшенного диапазона движения роботизированной руки 20 и соответствующего элемента 32 вытягивания руки), круговое расстояние 64 зубчатой рейки 40 может быть увеличено, а круговое расстояние 66 выступа 35 элемента 32 вытягивания руки (например, между бамперами 34, 36 элемента 32 вытягивания руки) может быть уменьшено. Например, круговое расстояние 64 зубчатой рейки 40, в градусах вдоль иллюстрированного рельса 44 (например, направляющей), может быть между 100 и 355 градусами, 200 и 350 градусами или 300 и 345 градусами. Конечно, расстояние 66 и зазоры 68, 70 учитывают остающиеся градусы, из 360 градусов, вдоль рельса 44 (например, направляющей).
[0035] Фиг. 4 иллюстрирует схематичное представление роботизированной системы 12 и соответствующей системы 46 управления. В иллюстрированном варианте осуществления, система 46 управления, как ранее описано, включает в себя контроллер 48 руки, выполненный с возможностью управлять движением роботизированной руки 20, и контроллер 50 аппаратного ограничителя, выполненный с возможностью управлять движением подвижного аппаратного ограничителя 38.
[0036] Контроллер 48 руки включает в себя память 54 и процессор 52, где память 54 конфигурируется, чтобы хранить команды, которые, когда исполняются процессором 52, дают команду контроллеру 48 руки выполнять некоторые действия или этапы. Например, команды, сохраненные в памяти 54, могут, когда исполняются процессором 52, давать команду контроллеру 48 руки (или процессору 52) составлять карту (например, вычислять, получать, определять) желаемый путь движения для роботизированной руки 20. Путь может зависеть от предполагаемого результата движения и от обстановки, окружающей роботизированную систему 12. Предполагаемый результат движения может быть закодирован командах или предполагаемый результат может быть введен в контроллер 48. Например, оператор может вводить в контроллер 48 (или в общую систему 46 управления) предполагаемый результат движения (например, вводя в контроллер 48 [или систему 46 управления] желание переместить объект из одного места в другое). Процессор 52 может затем составлять карту пути роботизированной руки 20, чтобы достигать задуманного результата.
[0037] Дополнительно, процессор 52 может связываться, по меньшей мере, с одним приводом 100 от мотора, чтобы приводить роботизированную руку 20 во вращение (например, через промежуточный мотор), на основе пути, карта которого составлена посредством контроллера 48 руки (или его процессора 52), чтобы давать команду на желаемое движение роботизированной руки 20. Только один привод 100 от мотора показан в иллюстрированном варианте осуществления, соединенный со вторым соединением 24 роботизированной системы 12 (например, через промежуточный мотор, который не показан в иллюстрированном варианте осуществления). Однако, путь, карта которого составлена для роботизированной руки 20, может требовать движения первого соединения 21, второго соединения 24, третьего соединения 27 или любого их сочетания, чтобы добиваться желаемого движения и предполагаемого результата желаемого движения, где каждое соединение 21, 24, 27 может включать в себя свой собственный независимый привод от мотора (и/или свой собственный независимый мотор). Дополнительно, как ранее описано, каждое соединение 21, 24, 27 может дополнительно включать в себя аналогичные подвижные аппаратные ограничители 38 и ассоциированные элементы управления, описанные со ссылкой на соединение 24 выше или ниже. Следует отметить, что выражение "предполагаемый результат", используемое в данном документе, может ссылаться на всеохватывающий предполагаемый результат (например, чтобы перемещать объект из одного места в другое) или на один из множества дискретных предполагаемых результатов, которые составляют всеохватывающий предполагаемый результат (например, шаги приращения роботизированной руки 20, чтобы перемещать объект из одного места в другое). Дополнительно, следует отметить, что контроллер 48 руки может давать команду роботизированной руке 20 двигаться после составления карты пути, или во время составления карты пути, или после того, как для некоторых участков пути карта составлена, а для других участков пути карта не составлена.
[0038] Контроллер 48 руки может сообщать контроллеру 50 аппаратного ограничителя, как иллюстрировано стрелкой 52, путь или участки пути, карта которых составлена для роботизированной руки 20. Контроллер 50 аппаратного ограничителя включает в себя память 58 и процессор 56, где память 58 конфигурируется, чтобы хранить команды, которые, когда исполняются процессором 56, дают команду контроллеру 50 аппаратного ограничителя выполнять некоторые действия или этапы. Например, команды, сохраненные в памяти 58, могут, когда исполняются процессором 56, давать команду контроллеру 50 аппаратного ограничителя (или процессору 56) считывать путь, карта которого составлена для роботизированной руки 20 и принята от контроллера 48 руки. Контроллер 50 аппаратного ограничителя может затем составлять карту пути для подвижного аппаратного ограничителя 38 полностью или частично на основе считывания пути, карта которого составлена для роботизированной руки 20 посредством контроллера 48 руки. Альтернативно, контроллер 50 аппаратного ограничителя (или его процессор 56) может составлять карту пути подвижного аппаратного ограничителя 38 без какого бы то ни было принятого и считанного пути, карта которого составлена для роботизированной руки 20 посредством контроллера 48 руки. Например, контроллер 50 аппаратного ограничителя может составлять карту пути для подвижного аппаратного ограничителя 38 полностью на основе желаемого движения роботизированной руки 20 (например, того же [или подмножества тех же] параметра[ов], используемого контроллером 48 руки, чтобы составлять карту пути роботизированной руки 20).
[0039] Контроллер 50 аппаратного ограничителя может затем связываться с приводом 102 от мотора, соединенным с аппаратным ограничителем 38 (например, с мотором 61), чтобы приводить в действие ходовой винт 60 зубчатого валика 42 подвижного аппаратного ограничителя 38. Ходовой винт 60 (или другой подходящий механизм зацепления) зацепляет зубцы 62 подвижного аппаратного ограничителя 38, приводя подвижный аппаратный ограничитель во вращение во втором круговом направлении 26 (или противоположно второму круговому направлению 26).
[0040] Фиг. 5 является блок-схемой последовательности операций процесса, иллюстрирующей способ 110 работы роботизированной руки 20, подвижного аппаратного ограничителя 38 и системы 46 управления на фиг. 4. В иллюстрированном варианте осуществления способ 110 включает в себя составление карты (блок 112) желаемого пути движения для роботизированной руки. Например, как ранее описано, контроллер руки может составлять карту движения роботизированной руки, чтобы добиваться конкретного действия или цели. Действие или цель могут включать в себя любое подходящее действие или цель, ассоциированные с робототехникой, такие как перемещение объекта из одного места в другое, сборка объекта, соединение одного объекта с другим объектом, и т.д. Карта пути может также быть составлена с учетом обстановки, окружающей роботизированную систему (или ее роботизированную руку). Например, карта пути может быть составлена, чтобы предоставлять возможность роботизированной руке добиваться желаемого действия или цели без касания или столкновения с окружающей обстановкой, если касание или столкновение с окружающей обстановкой не является частью желаемого действия или цели. Желаемое действие или цель могут быть запрограммированы в компонент программного обеспечения контроллера, или желаемое действие может быть представлено (например, введено) оператором, управляющим контроллером. В действительности, любой подходящий механизм для предоставления желаемого действия или цели рассматривается в настоящее время.
[0041] Как ранее описано, роботизированная система (или ее роботизированная рука) может включать в себя любое число соединений (например, 1 соединение, 2 соединения, 3 соединения, 4 соединения, 5 соединений, 6 соединений или более соединений), каждое соединение соединяется с возможностью обмена данными с контроллером руки (или с другим контроллером роботизированной системы). Таким образом, контроллер руки может быть приспособлен для управления движением одного или более соединений роботизированной системы. Таким образом, контроллер руки предоставляет возможность перемещения роботизированной руки в соответствии с путем, карта которого составлена посредством контроллера, чтобы добиваться желаемого действия или цели роботизированной руки.
[0042] Способ 110 также включает в себя составление карты (блок 114) желаемого пути движения для подвижного аппаратного ограничителя. Как ранее описано, подвижный аппаратный ограничитель может быть подвижным аппаратным ограничителем для конкретного соединения роботизированной системы. В некоторых вариантах осуществления подвижный аппаратный ограничитель может быть приспособлен для работы в качестве подвижного аппаратного ограничителя для более чем одного соединения роботизированной системы. Например, подвижный аппаратный ограничитель может быть подвижным от первого соединения роботизированной системы к другому соединению роботизированной системы. Альтернативно, множество соединений роботизированной системы может быть размещено в непосредственной близости друг с другом, в непосредственной близости с подвижным аппаратным ограничителем, или оба варианта, так что подвижный аппаратный ограничитель приспособлен для работы в качестве подвижного аппаратного ограничителя для множества соединений роботизированной системы без необходимости смещения от одного соединения к другому соединению. Также, как указано выше, каждое соединение может иметь свой собственный подвижный аппаратный ограничитель и ассоциированные элементы управления.
[0043] Чтобы составлять карту пути подвижного аппаратного ограничителя, контроллер аппаратного ограничителя может принимать желаемый путь движения, карта которого составлена для роботизированной руки, от контроллера руки. Например, контроллер руки и контроллер аппаратного ограничителя могут быть соединены с возможностью обмена данными друг с другом. В некоторых вариантах осуществления контроллер руки и контроллер аппаратного ограничителя могут быть единым, объединенным контроллером. В иллюстрированном варианте осуществления контроллер аппаратного ограничителя принимает желаемый путь движения, карта которого составлена для роботизированной руки посредством контроллера руки, и составляет карту желаемого пути движения для подвижного аппаратного ограничителя, принимая во внимание желаемый путь движения для роботизированной руки.
[0044] В других вариантах осуществления контроллер аппаратного ограничителя может составлять карту желаемого пути движения подвижного аппаратного ограничителя независимо от желаемого пути движения, карта которого составлена для роботизированной руки. Например, контроллер аппаратного ограничителя может принимать те же входные данные для желаемой цели движения роботизированной руки, которые принимает контроллер руки. На основе входных данных для желаемой цели движения роботизированной руки, контроллер аппаратного ограничителя может составлять карту желаемого пути движения для подвижного аппаратного ограничителя в соответствии с описанием выше. Как ранее описано, подвижный аппаратный ограничитель может быть приспособлен для работы в качестве аппаратного ограничителя для более чем одного соединения роботизированной системы. В некоторых вариантах осуществления подвижный аппаратный ограничитель может быть размещен на направляющей, которая служит мостом (например, пересекает) между двумя соединениями роботизированной системы. Контроллер аппаратного ограничителя, в зависимости от того, какое соединение требует действия (например, защиты) подвижного аппаратного ограничителя, может давать команду подвижному аппаратному ограничителю двигаться вдоль направляющей от одного соединения к другому. Перед, во время, или после движения подвижного аппаратного ограничителя вдоль направляющей от одного соединения к другому, контроллер аппаратного ограничителя может составлять карту желаемого пути движения подвижного аппаратного ограничителя, принимая во внимание желаемого пути движения с составленной картой, или желаемого действия или цели, соединения, задействуемого контроллером руки.
[0045] В иллюстрированном варианте осуществления способ 110 также включает в себя выполнение (блок 116) желаемого пути движения роботизированной руки и желаемого пути подвижного аппаратного ограничителя практически одновременно. Например, как ранее описано, контроллер руки может выполнять желаемый путь движения с составленной картой для роботизированной руки, а контроллер аппаратного ограничителя может выполнять желаемый путь движения с составленной картой для подвижного аппаратного ограничителя. Таким образом, роботизированная рука движется по фактическому пути движения, соответствующему желаемому пути движения для роботизированной руки, и подвижный аппаратный ограничитель движется по фактическому пути движения, соответствующему желаемому пути движения для подвижного аппаратного ограничителя. В целом, зубчатая рейка подвижного аппаратного ограничителя движется в непосредственной близости с роботизированной рукой (например, с бамперами элемента вытягивания руки для роботизированной руки). Движение зубчатой рейки подвижного аппаратного ограничителя в непосредственной близости с бамперами элемента вытягивания руки для роботизированной руки, как ранее описано, предоставляет возможность роботизированной руке двигаться в полной свободе по фактическому пути движения с составленной картой для роботизированной руки во время нормальной работы. Однако, непосредственная близость между зубчатой рейкой подвижного аппаратного ограничителя и бамперами элемента вытягивания руки для роботизированной руки также вынуждает зубчатую рейку подвижного аппаратного ограничителя блокировать движение роботизированной руки, если роботизированная рука (и соответствующий элемент вытягивания руки) движется за пределами желаемого пути движения с составленной картой для роботизированной руки, или вне его допустимых пределов погрешности.
[0046] Например, фиг. 6 является иллюстрацией варианта осуществления графика 120 позиции 122 относительно времени 124. Как показано в легенде 126 графика 120, график 120 включает в себя представление желаемого пути движения 132 с составленной картой для элемента 32 вытягивания руки и зубчатой рейки 40 (например, подвижного аппаратного ограничителя 38). Следует отметить, что, в то время как элемент 32 вытягивания руки и зубчатая рейка 40 могут быть в различных позициях, карта движения зубчатой рейки 40 предполагает соответствие (например, имитацию) с картой движения элемента 32 вытягивания руки. Таким образом, позиция элемента 32 вытягивания руки может быть сдвинута по фазе, чтобы соответствовать позиции зубчатой рейки 40, или наоборот. Более конкретно, позиция элемента 32 вытягивания руки в любое данное время может соответствовать позиции вектора 133 (например, центрированной между бамперами 34, 36 элемента 32 вытягивания руки), позиция зубчатой рейки 40 в любое данное время может соответствовать позиции вектора 135 (например, центрированной между точками 39 касания зубчатой рейки 40), и вектор 133 элемента 32 вытягивания руки может быть сдвинут по фазе (например, 180 градусов), чтобы совмещаться с вектором 135 зубчатой рейки 40. В целом, желаемый путь движения 132 с составленной картой для векторов 133, 135, после сдвига по фазе, может быть практически одинаковым. Следует отметить, что векторы 133, 135, используемые для иллюстрации желаемого пути движения 132 в иллюстрированном графике 120, могут пересекать какие-либо точки соответствующего элемента 32 вытягивания руки и зубчатой рейки 40, соответственно, любой может быть сдвинут по фазе соответственно. Другими словами, позиция вектора 133, иллюстрированная как центрированная между бамперами 34, 36, и позиция вектора 135, иллюстрированная как пересекающая центр зубчатой рейки 40, являются примерными и неограничивающими.
[0047] Как показано на иллюстрированном графике 120, допустимый предел 128 погрешности элемента 32 вытягивания руки и допустимый предел 130 погрешности зубчатой рейки 40 могут также быть включены в график 120. Допустимые пределы 128, 130 погрешности могут соответствовать механическим ограничениям роботизированной системы. Например, элемент 32 вытягивания руки и зубчатая рейка 40 могут вращаться посредством не бесконечно малых, дискретных шагов. Соответственно, элемент 32 вытягивания руки и зубчатая рейка 40 могут быть приспособлены для следования желаемому пути движения 132 с составленной картой, во время нормальных рабочих состояний, в соответствующих допустимых пределах 128, 130 погрешности, соответственно. Дополнительно, зазоры 68, 70 между бамперами 34, 36 элемента 32 вытягивания руки и точками 39 касания зубчатой рейки 40 имеют размеры, чтобы вмещать свободное движение элемента 32 вытягивания руки и зубчатой рейки 40 в объединенном допустимом пределе 131 погрешности (например, допустимом пределе 128 погрешности элемента 32 вытягивания руки и допустимом диапазоне 130 погрешности зубчатой рейки 40 подвижного аппаратного ограничителя 38). Однако, зазоры 68, 70 могут иметь размер как раз достаточно большой, чтобы вмещать только объединенный допустимый предел 131 погрешности. Другими словами, если элемент 32 вытягивания руки и/или зубчатая рейка 40 двигаются в область 140 вне объединенного допустимого предела 131 погрешности, один из бамперов 34, 36 может касаться одной из точек 39 касания, тем самым, вынуждая подвижный аппаратный ограничитель 38 блокировать движение элемента 32 вытягивания руки (и, как ранее описано, роботизированной руки [например, роботизированной руки 20 на фиг. 1-3], жестко соединенной с элементом 32 вытягивания руки).
[0048] Обращаясь теперь к фиг. 7 и 8, показаны дополнительные варианты осуществления роботизированной системы 12. Например, на фиг. 7, роботизированная система 12 включает в себя два подвижных аппаратных ограничителя 38, каждый подвижный аппаратный ограничитель 38 размещается поблизости от одного из бамперов 34, 36 элемента 32 вытягивания руки для роботизированной руки 20 (например, проходит через неподвижное основание 33 соединения 24). Соответственно, оба подвижных аппаратных ограничителя 38 могут перемещаться, когда элемент 32 вытягивания руки для роботизированной руки 20 перемещается. Например, подвижные аппаратные ограничители 38 могут перемещаться, чтобы практически сохранять зазоры 68, 70 между подвижными аппаратными ограничителями 38 и первым и вторым бамперами 34, 36, соответственно. Система 46 управления может управлять движением подвижных аппаратных ограничителей 38, роботизированной руки 20 или их сочетания, как ранее описано.
[0049] На фиг. 8 роботизированная система 12 также включает в себя два подвижных аппаратных ограничителя 38. Однако, на фиг. 7, каждый из подвижных ограничителей 38 центрируется в центральной точке 148 соединения 24 роботизированной руки 20 и включает в себя соответствующий рычаг 150, проходящийся от центральной точки 148. В иллюстрированном варианте осуществления бамперы 34, 36 размещаются на рычагах 150 самих подвижных аппаратных ограничителей 38, в противоположность размещению на компоненте роботизированной руки 20. Когда роботизированная рука 20 движется, так же поступают подвижные аппаратные ограничители 38 и соответствующие бамперы 34, 36. Например, как ранее описано, карты желаемых путей движения роботизированной руки 20 и подвижных аппаратных ограничителей 38 могут быть составлены и выполнены посредством системы 46 управления. Фактический путь движения подвижных аппаратных ограничителей 38 (соответствующих желаемому пути движения, определенному и нанесенному на карту посредством системы 46 управления) может вынуждать бамперы 34, 36 поддерживать иллюстрированные зазоры 68, 70. Если роботизированная рука 20 движется вне желаемого пути движения роботизированной руки 20 (или, более конкретно, вне допустимого предела погрешности желаемого пути движения), роботизированная рука 20 может касаться одного из бамперов 34, 36. Дополнительно или альтернативно, бамперы 34, 36 могут включать в себя датчики, размещенные в них или на них, которые обнаруживают касание или нежелательное приближение роботизированной руки 20. Датчики могут сообщать о касании или нежелательном приближении системе 46 управления, которая останавливает движение роботизированной руки 20.
[0050] В соответствии с вариантами осуществления настоящего изобретения роботизированная система включает в себя роботизированную руку, по меньшей мере, один подвижный аппаратный ограничитель и, по меньшей мере, один контроллер. Контроллер может составлять карту желаемого пути движения для роботизированной руки и желаемого пути движения, по меньшей мере, для одного подвижного аппаратного ограничителя, принимая во внимание желаемое действие, цель или результат желаемого пути движения роботизированной руки, принимая во внимание обстановку, окружающую роботизированную руку, или то и другое. Контроллер может составлять карту желаемого пути движения, по меньшей мере, одного подвижного аппаратного ограничителя полностью независимо от составленной карты желаемого пути движения роботизированной руки или, по меньшей мере, частично на основе составленной карты желаемого пути движения роботизированной руки. Поскольку подвижный аппаратный ограничитель является подвижным, чтобы отслеживать, имитировать или следовать желаемому пути движения роботизированной руки, подвижный аппаратный ограничитель предоставляет возможность защиты в случае, когда роботизированная рука отклоняется слишком далеко от составленной карты пути движения роботизированной руки (например, за допустимые пределы погрешности), но без излишнего ограничения способности или движения роботизированной руки. Другими словами, подвижный аппаратный ограничитель может блокировать движение роботизированной руки за пределами составленной карты пути роботизированной руки, но подвижный аппаратный ограничитель не ограничивает навигационный объем пространства, доступного для составления карты пути роботизированной руки. Таким образом, путь роботизированной руки может не ограничиваться подвижным аппаратным ограничителем как бы то ни было.
[0051] В то время как только некоторые отличительные признаки настоящего изобретения были иллюстрированы и описаны в данном документе, множество модификаций и изменений могут прийти на ум специалистам в области техники. Дополнительно, следует понимать, что компоненты различных вариантов осуществления, описанных в данном документе, могут быть объединены или поменяны друг с другом. Следовательно, следует понимать, что прилагаемая формула изобретения предназначается, чтобы охватывать все такие модификации и изменения как подпадающие под истинный смысл изобретения.
Устройство и способ стрелочного перевода
Система управления положением
Способ и система камер хранения
Устройство, система и способ формирования изображения
Основанный на движении аттракцион с узлом отображения изображения
Способ и устройство преобразования изображения
Шарнирно соединенная водная горка
Система и способ генерирования волн в различных направлениях
Система и способ для обеспечения визуальных эффектов пляжа аквапарка
Перемещающаяся демонстрационная дверь
Системы и способы для торможения или продвижения передвижного транспортного средства
Система катания (варианты)

