Результат интеллектуальной деятельности: Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия
Вид РИД
Изобретение
Предлагаемое изобретение относится к оборонной технике и применяется в многоцелевых зенитно-ракетных комплексах средней дальности действия, использующих в управляемых ракетах головку самонаведения.
Известно, что «В перспективных РЛС должен быть предусмотрен разнесенный в пространстве режим работы передатчиков и приемников…», а также, что «…При решении задач противовоздушной обороны должен развиваться активно-пассивный территориально-распределенный принцип построения радиолокационной системы с интеграцией и анализом потоков информации…». [«Вопросы перспективной радиолокации». Коллективная монография. / Под ред. А.В. Соколова, М.; Радиотехника, 2003 г. - 512 с.; ил., стр. 14, 15]
Известен способ многопозиционной работы радиолокационных станций (МПРЛС), при котором одна или несколько РЛС, как правило, удаленные от направления вероятного появления СВН противника, работают с излучением (активный режим), а остальные, как правило, выдвинутые в направлении вероятного появления СВН противника, - без излучения, только на прием (пассивный режим). «Многопозиционные РЛС (МПРЛС) в общем случае объединяют однопозиционные (ОПРЛС), бистатические (БиРЛС) и пассивные (ПРЛС) РЛС, расположенные в различных точках пространства (позициях)…». [Бакулев П.А., «Радиолокационные системы». - Радиотехника, М.; 2004 г., 320 с., ил. стр. 20]
Известна разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей, состоящая из цифровой вычислительной системы пункта боевого управления, вход-выход которой соединен шиной через аппаратуру приема-передачи данных пункта боевого управления с двумя входами-выходами двух однопозиционных радиолокационных систем. Каждая однопозиционная радиолокационная система содержит аппаратуру приема-передачи данных, цифровую вычислительную систему, аппаратуру излучения и обработки импульсного сигнала, пеленгационную антенну, радиопередающее устройство подсвета цели и систему автоматического сопровождения цели по направлению, волноводную суммарно-разностную систему, трехканальное радиоприемное устройство непрерывного сигнала, первый, второй и третий фазовые детекторы, гетеродин, аппаратуру формирования опорного сигнала и дополнительную антенну. При этом на обе однопозиционные радиолокационные системы с пункта боевого управления по каналу телекодовой связи передаются выраженные в абсолютной системе (Xi,Yi,Hi) координаты намеченной цели [RU №2374596 С1, опубл.27.11.2009 г., МПК F41H 11/02]
Приведенные решения обладают недостатком заключающемся в том, что они используют обмен информацией по радиоканалу, который раскрывает сам факт их работы, кроме того, радиоканал подвержен воздействию помех, в том числе и искусственных.
Наиболее близким по технической сущности и выбранным за прототип является предназначенная для обеспечения работы многоцелевых зенитно-ракетных комплексов, использующих в ракетах полуактивную головку самонаведения, «Многофункциональная радиолокационная станция обнаружения целей, подсвета сопровождаемых целей и наведения ракет зенитно-ракетного комплекса средней дальности действия» [RU №2343394 С1, опубл. 10.01.2009 г. МПК F41H 11/02], содержащая радиопередающее устройство канала обзора и радиопередающее устройство канала подсвета, выходы которых подключены соответственно к первому и второму входам фазированной антенной решетки, выход которой соединен с первым входом СВЧ - приемного устройства, систему управления, первый выход которой подключен к первому входу радиопередающего устройства канала обзора, второй выход системы управления подключен к первому входу радиопередающего устройства канала подсвета. Кроме того, она содержит сигнальный процессор обработки принимаемых сигналов, дешифратор, коммутатор, формирователь гетеродинного сигнала подсвета, систему регистрации и индикатор оператора. Выход СВЧ - приемного устройства подключен к входу сигнального процессора обработки принимаемых сигналов, первый выход которого подключен к первому входу системы управления, а второй выход - к входу дешифратора, выход дешифратора соединен со вторым входом системы управления, выход формирователя гетеродинного сигнала подсвета соединен с первым входом коммутатора, третий выход системы управления соединен со вторым входом коммутатора, выход коммутатора подключен ко второму входу СВЧ - приемного устройства, причем выход системы управления подключен соответственно к входам системы регистрации и индикатора оператора.
Недостатком прототипа является то, что он не может обеспечить многоцелевому зенитно-ракетному комплексу, использующему в ракетах полуактивную головку самонаведения, возможность работы в активно-пассивном режиме при полном радиомолчании пассивной самоходной огневой установки вплоть до начала подсвета цели после пуска ракеты.
Задачей предлагаемого изобретения является обеспечение возможности работы многоцелевого зенитно-ракетного комплекса, использующего в ракетах полуактивную головку самонаведения в активно-пассивном режиме.
Техническим результатом многофункциональной РЛС зенитного ракетного комплекса средней дальности является обеспечение возможности проведения в составе объектов размещения как активной работы с излучением, так и пассивной работы при полном радиомолчании вплоть до начала подсвета цели после пуска ракеты (одной или нескольких).
Технический результат достигается тем, что многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия содержит радиопередающее устройство канала обзора и радиопередающее устройство канала подсвета, выходы которых подключены соответственно к первому и второму входам фазированной антенной решетки, выход которой соединен с первым входом СВЧ приемного устройства, систему управления, второй выход которой подключен к первому входу радиопередающего устройства канала подсвета, сигнальный процессор обработки принимаемых сигналов, первый выход которого соединен с первым входом системы управления, дешифратор, коммутатор, формирователь гетеродинного сигнала подсвета, систему регистрации и индикатор оператора. Второй выход сигнального процессора обработки принимаемых сигналов подключен к входу дешифратора, выход дешифратора соединен со вторым входом системы управления, выход формирователя гетеродинного сигнала подсвета соединен с первым входом коммутатора, третий выход системы управления соединен со вторым входом коммутатора, выход коммутатора подключен ко второму входу СВЧ приемного устройства, причем четвертый выход системы управления подключен соответственно к входам системы регистрации и индикатора оператора.
Новыми признаками, позволяющими обеспечить заявленный технический результат являются введение разветвителя сигнала, второго коммутатора, сигнального процессора пассивного режима, устройства изменяемой задержки, третьего коммутатора и системы управления активно-пассивным режимом с портом ввода-вывода. Выход СВЧ приемного устройства соединен с входом разветвителя сигналов, первый и второй выходы разветвителя сигналов соединены соответственно с вторым входом третьего коммутатора и с первым входом сигнального процессора пассивного режима, первый и второй выходы сигнального процессора пассивного режима соединены соответственно с входом системы управления активно-пассивным режимом и с первым входом устройства изменяемой задержки, выход устройства изменяемой задержки соединен с первым входом третьего коммутатора, выход третьего коммутатора соединен с входом сигнального процессора обработки принимаемых сигналов, первый выход системы управления соединен с первым входом второго коммутатора, выход которого соединен с входом радиопередающего устройства канала обзора, второй и третий входы второго коммутатора соединены соответственно со вторым и с третьим выходами системы управления активно-пассивным режимом, первый выход системы управления активно-пассивным режимом соединен с вторым входом сигнального процессора пассивного режима, четвертый и пятый выходы системы управления активно-пассивным режимом соединены соответственно с третьим входом третьего коммутатора и с вторым входом устройства изменяемой задержки, причем, система управления активно-пассивным режимом через порт ввода-вывода связана с вычислительной системой объекта размещения.
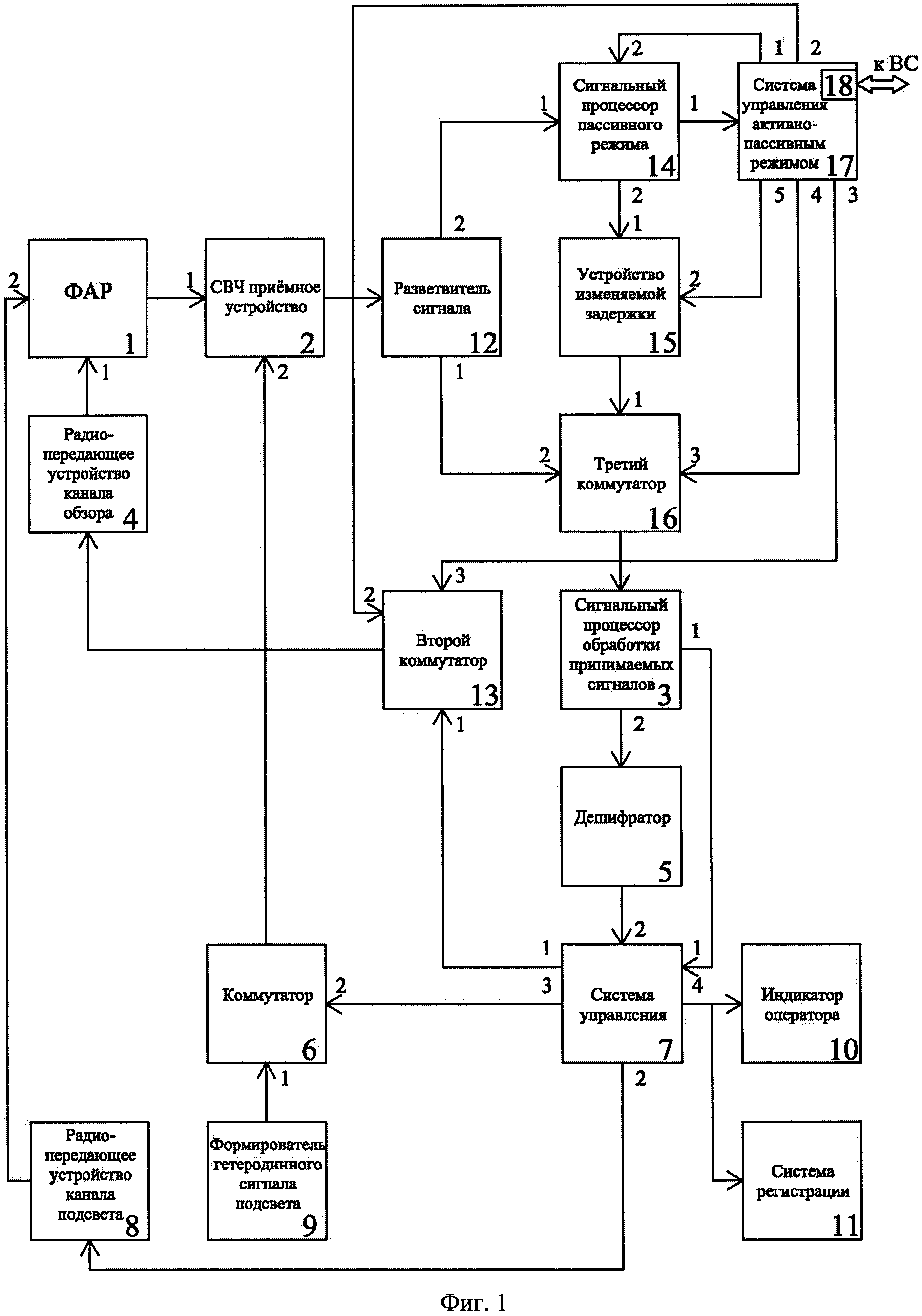
На фиг. 1 изображена функциональная блок-схема предлагаемой «Многофункциональной РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия».
На функциональной блок-схеме (фиг. 1) приняты следующие обозначения:
1 - Фазированная антенная решетка (ФАР);
2 - СВЧ приемное устройство;
3 - Сигнальный процессор обработки принимаемых сигналов;
4 - Радиопередающее устройство (РИДУ) канала обзора;
5 - Дешифратор;
6 - Коммутатор;
7 - Система управления;
8 - Радиопередающее устройство (РПДУ) канала подсвета;
9 - Формирователь гетеродинного сигнала подсвета;
10 - Индикатор оператора;
11 -Система регистрации;
12 - Разветвитель сигнала;
13 - Второй коммутатор;
14 - Сигнальный процессор пассивного режима;
15 - Устройство изменяемой задержки;
16 - Третий коммутатор;
17 - Система управления активно-пассивным режимом;
18 - Порт ввода-вывода.
Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия содержит радиопередающее устройство канала обзора (4) и радиопередающее устройство канала подсвета (8), выходы которых подключены соответственно к первому и второму входам фазированной антенной решетки (1), выход которой соединен с первым входом СВЧ приемного устройства (2), систему управления (7), второй выход которой подключен к входу радиопередающего устройства канала подсвета (8), сигнальный процессор обработки принимаемых сигналов (3), первый выход которого соединен с первым входом системы управления (7), дешифратор (5), коммутатор (6), формирователь гетеродинного сигнала подсвета (9), систему регистрации (11) и индикатор оператора (10). Второй выход сигнального процессора обработки принимаемых сигналов (3) подключен к входу дешифратора (5), выход дешифратора (5) соединен со вторым входом системы управления (7), выход формирователя гетеродинного сигнала подсвета (9) соединен с первым входом коммутатора (6), третий выход системы управления (7) соединен со вторым входом коммутатора (6), выход коммутатора (6) подключен к второму входу СВЧ приемного устройства (2), причем четвертый выход системы управления (7) подключен соответственно к входам системы регистрации (11) и индикатора оператора (10).
Кроме того, он содержит разветвитель сигнала (12), второй коммутатор (13), сигнальный процессор пассивного режима (14), устройство изменяемой задержки (15), третий коммутатор (16) и систему управления активно-пассивным режимом (17) с портом ввода-вывода (18), при этом, выход СВЧ приемного устройства (2) соединен с входом разветвителя сигналов (12), первый и второй выходы разветвителя сигналов (12) соединены соответственно с вторым входом третьего коммутатора (16) и первым входом сигнального процессора пассивного режима (14), первый и второй выходы сигнального процессора пассивного режима (14) соединены соответственно с входом системы управления активно-пассивным режимом (17) и первым входом устройства изменяемой задержки (15), выход устройства изменяемой задержки (15) соединен с первым входом третьего коммутатора (16), выход третьего коммутатора (16) соединен с входом сигнального процессора обработки принимаемых сигналов (3), первый выход системы управления (7) соединен с первым входом второго коммутатора (13), выход которого соединен с входом радиопередающего устройства канала обзора (4), второй и третий входы второго коммутатора (13) соединены соответственно со вторым и с третьим выходами системы управления активно-пассивным режимом (17), первый выход системы управления активно-пассивным режимом (17) соединен с вторым входом сигнального процессора пассивного режима (14), четвертый и пятый выходы системы управления активно-пассивным режимом (17) соединены соответственно с третьим входом третьего коммутатора (16) и вторым входом устройства изменяемой задержки (15), при этом система управления активно-пассивным режимом (17) через порт ввода-вывода (18) связана с вычислительной системой объекта размещения.
Изображенная на фиг. 1 «Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия» при обзоре пространства, сопровождении обнаруженных целей и их подсвете в активном режиме и пассивном режиме работает следующим образом:
В МФРЛС в активном режиме в тактах обзора вход радиопередающего устройства канала обзора (4) через второй коммутатор (13) подключается к первому выходу системы управления (7) и МФРЛС излучает сигнал, именуемый далее основным, в заданном направлении. Отраженные от целей сигналы, принятые фазированной антенной решеткой (1), через СВЧ усилитель (2), разветвитель сигналов (12) и третий коммутатор (16) поступают на вход сигнального процессора обработки принимаемых сигналов (3), с первого выхода которого обработанный сигнал поступает на первый вход системы управления (7), при этом система управления активно-пассивным режимом (17) обеспечивает соответствующую коммутацию.
В зависимости от положения луча фазированной антенной решетки (1) в пространстве и задержки принимаемого сигнала, система управления (7) определяет положение обнаруженных целей в пространстве в сферической системе координат МФРЛС и решает задачи сопровождения, пусковые задачи встречи ракеты с целью и момент пуска ракет по каждой цели.
Сферическая система координат (β, ε, r), где β - азимут, ε - угол места, r - расстояние, как правило, используется для определения положения в пространстве цели или ракеты наземными радиолокационными станциями, а для передачи информации используется прямоугольная система координат (X, Y, Z). При этом, за начало координат О принимается пункт управления, а направления осей OX, OZ связывается с положением стран света. Соотношение между прямоугольной и сферической системами координат:
X=r cos ε cos β;
Y=r sin ε;
Z=r cos ε sin β.
[Неупокоев Ф.К. «Стрельба зенитными ракетами». - 3-е изд., перераб. и доп. - М.; Воениздат, 1991,343 с.; ил. Стр. 9…11].
МФРЛС в активном режиме в тактах сопровождения излучает помимо основного сигнала, определяемого системой управления (7), дополнительный сигнал, определяемый системой управления активно-пассивным режимом (17), предназначенный для МФРЛС, работающей в пассивном режиме, для чего на время излучения дополнительного сигнала второй выход системы управления активно-пассивным режимом (17) через второй коммутатор (13) подключается к входу радиопередающего устройства канала обзора (4).
Дополнительный сигнал содержит кодированные определенным образом признак передачи пакета информации, признак работающей в пассивном режиме адресуемой МФРЛС, параметры сопровождаемой цели, пересчитанные в прямоугольную систему координат, а также условия проведения боевой работы с этой целью, при этом, система управления активно-пассивным режимом (17) с первого выхода передает действующий вариант кодирования на второй вход сигнального процессора пассивного режима (14) для обеспечения возможности обработки им принимаемого отраженного от сопровождаемой цели дополнительного сигнала и передачи результатов декодирования на вход системы управления активно-пассивным режимом (17). Система управления активно-пассивным режимом (17) определяет правильность передачи радиопередающим устройством канала обзора (4) текущей информации в каждом такте сопровождения для соответствующей цели и устанавливает в устройстве изменяемой задержки (15) передачу сигнала без задержки. Кроме того, сигнальный процессор активно-пассивного режима (14) отделяет принятый основной сигнал от дополнительного и передает его на первый вход устройства изменяемой задержки (15), которая без задержки передает его через третий коммутатор (16) на вход сигнального процессора обработки принимаемых сигналов (3).
МФРЛС в активном и в пассивном режиме работы для наведения ракеты после пуска периодически включает такты подсвета, в которых система управления (7) вводит в радиопередающее устройство (РПДУ) канала подсвета (8) необходимую для более точного наведения информацию радио-коррекции полета ракеты путем соответствующих манипуляций частоты непрерывного сигнала подсвета и с помощью коммутатора (6) подключает к СВЧ приемному устройству (2) формирователь гетеродинного сигнала подсвета (9).
Принимаемые в каждом такте подсвета СВЧ приемным устройством (2) излучаемый сигнал подсвета обрабатывается сигнальным процессором обработки принимаемых сигналов (3), для чего система управления активно-пассивным режимом (17) через третий коммутатор (16) обеспечивает соединение его входа с первым выходом разветвителя сигналов (12), дешифрируется дешифратором (5) по каждой цели и ракете и поступает на систему управления (7), где сравнивается с исходной информацией радио-коррекции, подаваемой на радиопередающее устройство канала подсвета (8). Система управления (7) определяет правильность передачи радиопередающим устройством канала подсвета (8) исходной информации радио-коррекции в каждом такте подсвета для соответствующей цели и ракеты и выдает на индикатор оператора (10) информацию о правильности работы канала управления и радио-коррекции, а в систему регистрации (11) информацию о координатах сопровождаемых целей и расшифрованную информацию радио-коррекции по каждой ракете с целью последующего анализа боевой работы.
МФРЛС в пассивном режиме в тактах обзора и в тактах сопровождения работает без излучения только «на прием», для чего система управления активно-пассивным режимом (17) с помощью второго коммутатора (13) отключает вход радиопередающего устройства канала обзора (4) от первого выхода системы управления (7) и от третьего выхода системы управления активно-пассивным режимом (17), при этом, выход фазированной антенной решетки (1) через разветвитель сигнала (12) и СВЧ приемное устройство (2) соединен с первым входом сигнального процессора пассивного режима (14), на второй вход которого с первого выхода системы управления активно-пассивным режимом (17) подан образец действующего сигнала кодирования.
Принятые фазированной антенной решеткой (1) отраженные от целей, сопровождаемых работающей в активном режиме другой МФРЛС, сигналы (основной и дополнительный), с выхода СВЧ усилителя (2) через разветвитель сигналов (12) поступают на первый вход сигнального процессора пассивного режима (14), который обнаружив кодированный в соответствии с образцом, дополнительный сигнал, адресованный данной МФРЛС, выделяет из него информацию, которую передает на вход системы управления активно-пассивным режимом (17), кроме того, отделяет принятый основной сигнал от дополнительного и передает его на первый вход устройства изменяемой задержки (15).
Система управления активно-пассивным режимом (17) производит пересчет полученных текущих координат сопровождаемой цели из прямоугольной системы в сферическую (β, ε, r) и вырабатывает сигналы, необходимые для управления положением луча фазированной антенной решетки (1) в пространстве и сопровождения цели по угловым координатам разомкнутой следящей системой. [Гитис Э.И., Данилович Г.А., Самойленко В.И., «Техническая кибернетика». Учебник для радиотехнических вузов, «Советское радио», 1968, с. 488, стр. 8].
Кроме того, для синхронизации работы других устройств МФРЛС, система управления активно-пассивным режимом (17) определяет соответствующее рассчитанной дальности до сопровождаемой цели значение задержки принятого основного сигнала относительно начала периода повторения и передает это значение на второй вход устройства изменяемой задержки (15), с выхода которой задержанный основной сигнал через третий коммутатор (16) поступает на вход сигнального процессора обработки принимаемых сигналов (3) и далее на первый вход системы управления (7), что обеспечивает корректную работу всех систем МФРЛС, в частности, работу индикатора оператора (10).
Таким образом, «Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия» сопровождая по трем координатам одну или несколько целей в активном режиме (с излучением), обеспечивает сопровождение этих же целей другой МФРЛС, работающей в пассивном режиме без излучения вплоть до момента начала подсвета цели (целей) после пуска ракеты (ракет).
Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия содержит радиопередающее устройство канала обзора и радиопередающее устройство канала подсвета, выходы которых подключены соответственно к первому и второму входам фазированной антенной решетки, выход которой соединен с первым входом СВЧ приемного устройства, систему управления, второй выход которой подключен к первому входу радиопередающего устройства канала подсвета, сигнальный процессор обработки принимаемых сигналов, первый выход которого соединен с первым входом системы управления, дешифратор, коммутатор, формирователь гетеродинного сигнала подсвета, систему регистрации и индикатор оператора, при этом второй выход сигнального процессора обработки принимаемых сигналов подключен к входу дешифратора, выход дешифратора соединен со вторым входом системы управления, выход формирователя гетеродинного сигнала подсвета соединен с первым входом коммутатора, третий выход системы управления соединен со вторым входом коммутатора, выход коммутатора подключен ко второму входу СВЧ приемного устройства, причем четвертый выход системы управления подключен соответственно к входам системы регистрации и индикатора оператора, отличающаяся тем, что дополнительно введены разветвитель сигнала, второй коммутатор, сигнальный процессор пассивного режима, устройство изменяемой задержки, третий коммутатор и система управления активно-пассивным режимом с портом ввода-вывода, при этом выход СВЧ приемного устройства соединен с входом разветвителя сигналов, первый и второй выходы разветвителя сигналов соединены соответственно с вторым входом третьего коммутатора и первым входом сигнального процессора пассивного режима, первый и второй выходы сигнального процессора пассивного режима соединены соответственно с входом системы управления активно-пассивным режимом и первым входом устройства изменяемой задержки, выход устройства изменяемой задержки соединен с первым входом третьего коммутатора, выход третьего коммутатора соединен с входом сигнального процессора обработки принимаемых сигналов, первый выход системы управления соединен с первым входом второго коммутатора, выход которого соединен с входом радиопередающего устройства канала обзора, второй и третий входы второго коммутатора соединены соответственно со вторым и с третьим выходами системы управления активно-пассивным режимом, первый выход системы управления активно-пассивным режимом соединен с вторым входом сигнального процессора пассивного режима, четвертый и пятый выходы системы управления активно-пассивным режимом соединены соответственно с третьим входом третьего коммутатора и вторым входом устройства изменяемой задержки, причем система управления активно-пассивным режимом через порт ввода-вывода связана с вычислительной системой объекта размещения.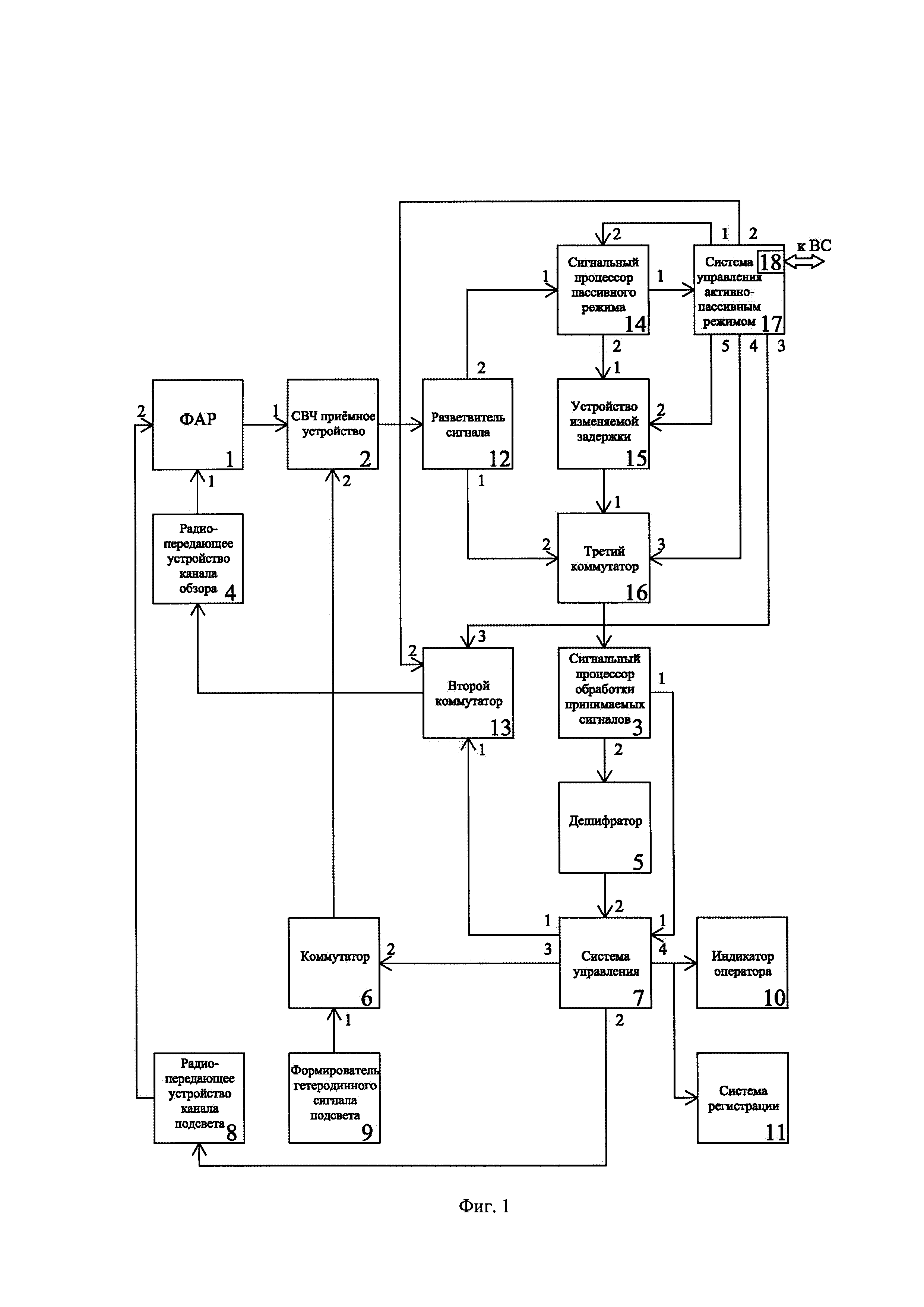
Способ повышения разрешающей способности по дальности радиолокационной станции
Т-циркулятор
Y-циркулятор
Радиолокационная станция
Бортовая радиолокационная станция
Способ определения диаграммы направленности фазированной антенной решетки
Т-циркулятор
Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом
Способ формирования круговой зоны электронного сканирования цилиндрической фазированной антенной решетки
Способ передачи данных
Зенитный ракетный комплекс

