Способ компенсации синфазной помехи в микромеханическом гироскопе
Вид РИД
Изобретение
Изобретение относится к области микромеханики, в частности, к микромеханическим гироскопам (ММГ) вибрационного типа.
Известно, что после возбуждения гармонических колебаний подвижной массы (ПМ) чувствительного элемента (ЧЭ) по оси первичных колебаний с амплитудой Х0 и угловой частотой ω, изменение положения ПМ по этой оси может быть описано выражением X0sin(ωt).
В этом случае при наличии угловой скорости Ω основания ММГ, на ПМ по оси вторичных колебаний действует сила Кориолиса Fc, для которой справедливо выражение:

где k - коэффициент пропорциональности,
t - время.
В реальных конструкциях ММГ на ПМ помимо силы Кориолиса Fc могут воздействовать и другие силы, вызывающие колебания ПМ по оси вторичных колебаний с угловой частотой ω. Эти силы могут либо совпадать по фазе с силой Fc, либо быть сдвинуты по фазе на 90°.
Колебания ПМ по оси вторичных колебаний измеряются емкостным датчиком, формируемым с помощью соответствующей электродной структуры, который преобразует эти колебания в электрический сигнал S(t), содержащий три составляющие: полезный сигнал с амплитудой Ω(t), квадратурную и синфазную помехи.
Сигнал S(t) может быть представлен выражением (2):

где k1 - коэффициент преобразования емкостного датчика,
Δϕ - сдвиг фазы в канале вторичных колебаний,
Bq - амплитуда квадратурной помехи,
Bi - амплитуда синфазной помехи.
Соответственно, силы, вызывающие появление квадратурной и синфазной помех, будем обозначать соответствующими индексами: Fq и Fi;.
Для выделения сигнала, пропорционального измеряемой угловой скорости Ω(t), из сигнала S(t) в канале вторичных колебаний используются:
- синхронный детектор или демодулятор, осуществляющий операцию перемножения сигнала S(t) на опорный сигнал, который должен совпадать по фазе с сигналом cos(ωt+Δϕ);
- фильтр низкой частоты (ФНЧ), вход которого соединен с выходом демодулятора.
Из-за погрешностей формирования опорного сигнала его фаза может быть сдвинута по отношению к Δϕ на величину 
Как показано в [1] в этом случае выходной сигнал демодулятора Sд может быть представлен в виде

Величины Bi,  Bq зависят от температуры ЧЭ. Изменение температуры приводит к изменению сигнала Sд даже при неизменной величине Ω. Т.е. из-за изменения величин Bi и
Bq зависят от температуры ЧЭ. Изменение температуры приводит к изменению сигнала Sд даже при неизменной величине Ω. Т.е. из-за изменения величин Bi и  выходной сигнал Sд содержит составляющие, из-за которых измерение угловой скорости происходит с погрешностью. Это снижает точность ММГ.
выходной сигнал Sд содержит составляющие, из-за которых измерение угловой скорости происходит с погрешностью. Это снижает точность ММГ.
Для уменьшения составляющей обусловленной квадратурной помехой, используют различные способы ее компенсации, в частности, специальные, так называемые квадратурные электроды, описанные, например, в отечественных и зарубежных патентах [2-8].
Особенности работы устройств подавления квадратурной помехи рассмотрены в работах [9-10].
Пример ММГ, в котором осуществляется компенсация сил Fq и Fi и, соответственно, снижение квадратурной и синфазной помех, приведен в [11]. Указанный ММГ содержит электроды, которые в описании к патенту индексированы буквами "С", "Q","P", означающими соответственно "Coriolis-sensing, quadrature и phase-compensated electrodes" (далее для удобства эти электроды называются измерительными, квадратурными и синфазными электродами).
Способ компенсации синфазной помехи, предложенный в [11], заключается в формировании переменного напряжения на синфазных электродах, фаза которого совпадает с фазой силы Кориолиса Fc, а амплитуда этого напряжения определяется в системе с отрицательной обратной связью, образованной последовательно соединенными измерительными электродами, преобразователем емкость-напряжение, демодулятором, первым и вторым ФНЧ, модулятором и синфазными электродами. Эти элементы совместно с ЧЭ формируют систему с отрицательной обратной связью по перемещению ЧЭ, в которой при определенных условиях подавляется синфазная помеха за счет формирования с помощью синфазных электродов силы, компенсирующей силу Fi. В этой системе компенсации при  сигнал на выходе первого ФНЧ с достаточно широкой полосой пропускания (как указано, она равна 32 Гц), в соответствии с выражением (3) содержит две составляющие - Bi и Ω. В ней используется частотное разделение сигналов, пропорциональных Bi и Ω, чтобы исключить влияние изменений во времени угловой скорости Ω. Поэтому полоса пропускания второго ФНЧ выбрана низкой (0,1 Гц).
сигнал на выходе первого ФНЧ с достаточно широкой полосой пропускания (как указано, она равна 32 Гц), в соответствии с выражением (3) содержит две составляющие - Bi и Ω. В ней используется частотное разделение сигналов, пропорциональных Bi и Ω, чтобы исключить влияние изменений во времени угловой скорости Ω. Поэтому полоса пропускания второго ФНЧ выбрана низкой (0,1 Гц).
Частотное разделение сигналов эффективно в том случае, когда спектры этих сигналов не совпадают. Величина Bi может считаться медленно меняющейся, т.к. ее изменение может вызываться изменениями силы Fi при относительно медленных изменениях температуры ЧЭ. В случае, когда ММГ используется только для измерения быстро изменяющихся угловых скоростей, спектр сигнала угловой скорости Ω будет лежать выше полосы пропускания второго фильтра и составляющая, зависящая от Ω, не появится на выходе второго ФНЧ и не будет влиять на работу системы компенсации.
Для компенсации синфазной помехи, т.е. для снижения Bi до 0, сила электрического поля Fэ, создаваемая синфазными электродами, должна уравновешивать силу Fi, т.е. условием отсутствия синфазной помехи в ММГ является равенство амплитуд этих сил и сдвиг фаз между этими силами 180°. Таким образом, если Fi=Facos(ωt), то
где Fa - амплитуда силы Fi.
Амплитуда Fa зависит от конфигурации электродов и способов формирования напряжения на них. В случае расположения пары синфазных электродов с двух сторон ПМ по оси вторичных колебаний, формирования на них противофазных напряжений с амплитудой А вида ±Acos(ωt) и наличия постоянного напряжения величиной Е между ПМ и этими электродами, сила Fэ может быть определена из выражения:

где kэ - коэффициент, зависящий от конструкции и геометрических размеров синфазных электродов.
В устройстве с системой компенсации по патенту [11] при достаточно высоком контурном усилении обеспечивается выполнение условия (4).
Однако, когда ММГ используется для измерения угловых скоростей в низкочастотной области, погрешности подавления силы Fi и измерения Ω, возрастают, т.к. в этом случае разделение составляющих Bi и Ω происходит с погрешностью. А в случае использования ММГ для измерения постоянных на длительных интервалах времени значений Ω (например, как это имеет место при циркуляции объекта, на котором установлен ММГ) данный способ не применим, т.к. система компенсации синфазной помехи будет компенсировать не только силу Fi, но и Fc.
Компенсация силы Fi сигналом постоянной амплитуды, т.е. без системы компенсации, не эффективна, т.к. величина синфазной помехи, как показывают эксперименты, зависит от температуры [12].
Известны ММГ со встроенным датчиком температуры (ВДТ) и блоком температурной коррекции (БТК) выходного сигнала, на вход которого поступают сигналы с выхода канала формирования выходного сигнала и ВДТ [13-15]. При таком способе компенсируются температурные изменения сигналов в канале формирования выходного сигнала, обусловленные разными погрешностями (как погрешности, возникающие при изготовлении чувствительного элемента, так и температурные нестабильности элементов электроники). В этом случае оказывается невозможным точно подобрать сигнал, компенсирующий температурные погрешности. Кроме того, при таком способе компенсации имеют место колебания ПМ с переменной амплитудой под действием изменяющейся силы Fi, что может вызывать дополнительные погрешности измерения Ω в ММГ из-за нелинейности емкостного датчика перемещения ПМ.
К недостаткам способа-прототипа, в качестве которого выбран способ по патенту [11], можно отнести то, что область применения описываемого в нем ММГ ограничена. В случае, когда предполагается использование ММГ для измерения угловых скоростей в низкочастотной области, погрешности подавления Fi и измерения Ω возрастают. А в случае использования ММГ для измерения постоянных на длительных интервалах времени значений Ω способ-прототип не применим.
Решаемая техническая проблема - уменьшение влияния изменений температуры окружающей среды и исключение влияния измеряемой угловой скорости на степень подавления синфазной помехи.
Достигаемый технический результат изобретения - повышение точности ММГ.
Сущность изобретения заключается в том, что предварительно экспериментально определяют зависимость амплитуды компенсирующего напряжения на синфазных электродах от выходного сигнала встроенного датчика температуры при изменении температуры окружающей среды; затем реализуют эту зависимость с помощью введения блока преобразования напряжения; формируют напряжение на синфазных электродах путем модуляции выходного сигнала блока преобразования напряжения опорным сигналом демодулятора.
Поставленная задача достигается тем, что зависимость амплитуды А компенсирующего напряжения на синфазных электродах от выходного сигнала встроенного датчика температуры Vдт при изменении температуры окружающей среды определяют следующим образом:
а) установив микромеханический гироскоп в термокамеру на неподвижном основании;
б) изменяют с определенным шагом (ДТ) температуру в термокамере;
в) изменяя напряжение на входе модулятора на каждом шаге изменения температуры в термокамере, добиваются нулевого значения выходного сигнала микромеханического гироскопа;
г) измеряют соответствующие значения напряжений на выходе встроенного датчика температуры и амплитуды А после достижения нулевого значения выходного сигнала микромеханического гироскопа;
д) аппроксимируют зависимости A(Vдт) полученных на каждом шаге изменения температуры.
Заявленный способ поясняется чертежами.
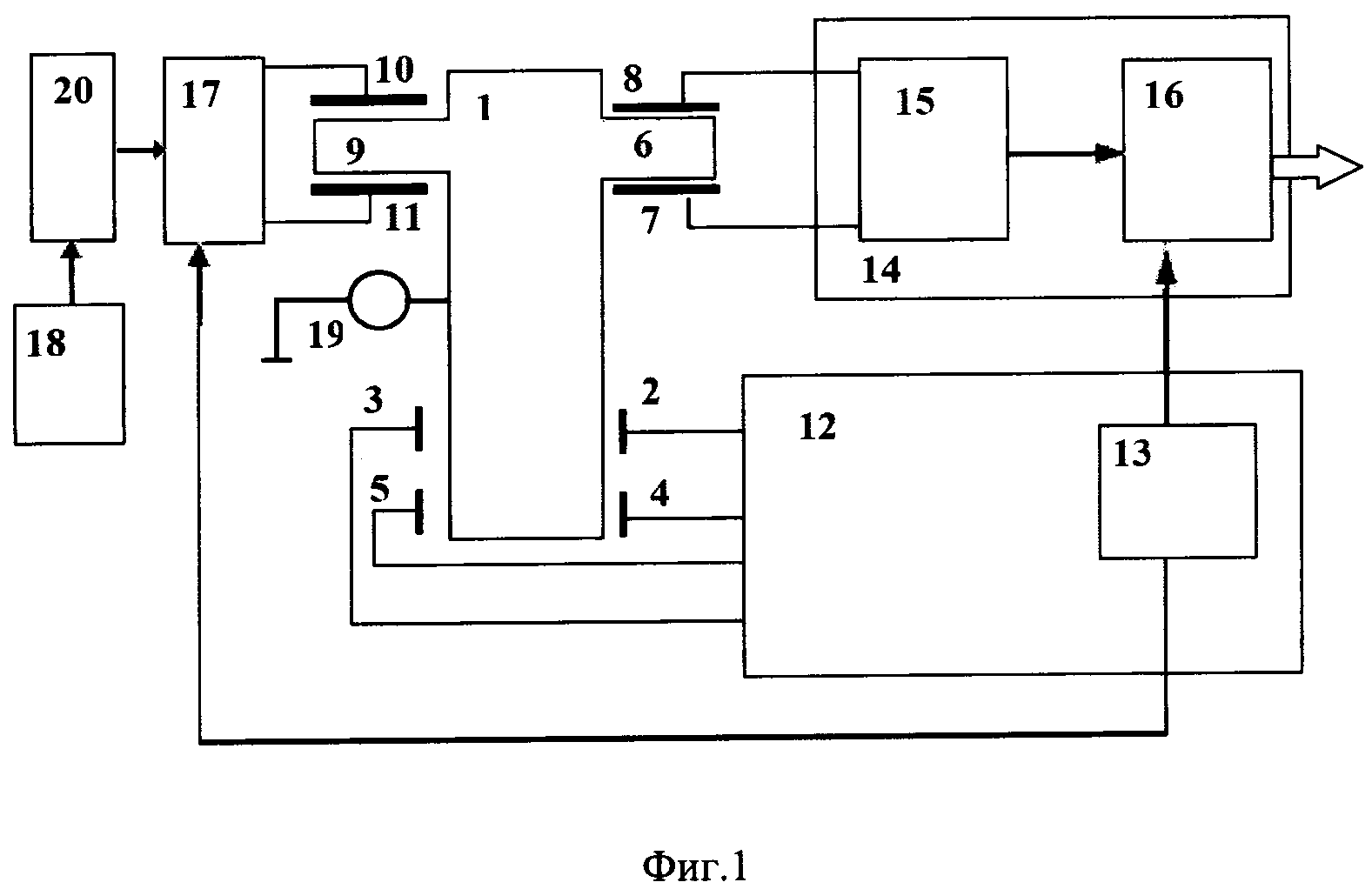
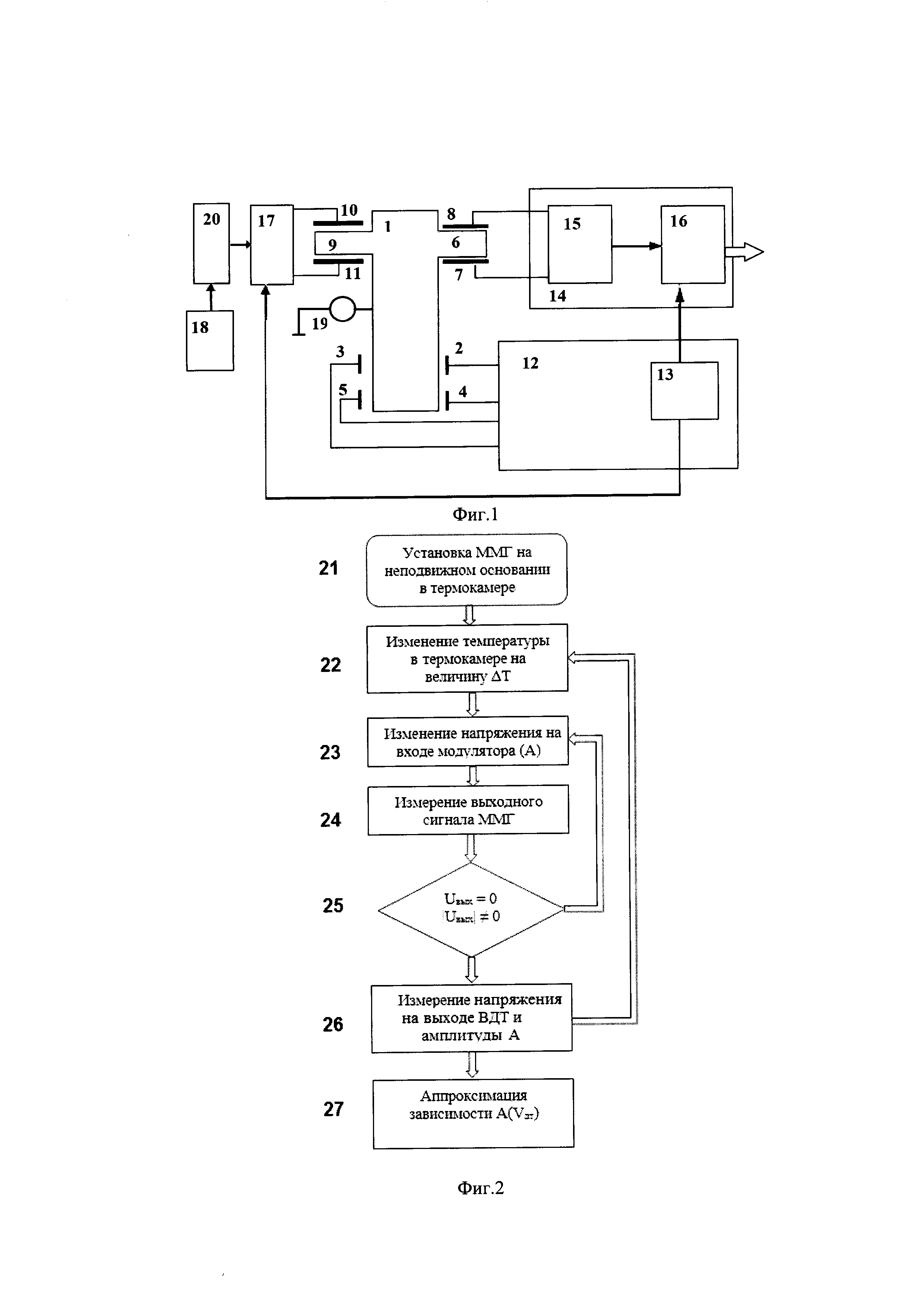
На фиг. 1 приведена блок-схема микромеханического гироскопа.
На фиг. 1 приняты следующие обозначения:
1 - подвижная масса (ПМ) ЧЭ ММГ;
2-5 - неподвижные гребенчатые электроды;
6 - подвижный измерительный электрод;
7, 8 - неподвижные измерительные электроды;
9 - подвижный синфазный электрод;
10, 11 - неподвижные синфазные электроды;
12 - канал управления первичными колебаниями (далее - КУПК);
13 - блок формирования опорных сигналов;
14 - канал формирования выходного сигнала;
15 - преобразователь емкость-напряжение (ПЕН);
16 - демодулятор;
17 - модулятор;
18 - встроенный в ММГ датчик температуры (ВДТ);
19 - источник постоянного напряжения (ИПН);
20 - блок преобразования напряжения (БПН).
На фиг. 2 приведена блок-схема последовательности операций, позволяющих получить зависимость амплитуды компенсирующего напряжения на входе модулятора от выходного сигнала встроенного датчика температуры:
блок 21 - установка ММГ на неподвижном основании в термокамере;
блок 22 - изменение температуры в термокамере на величину ΔT;
блок 23 - изменение напряжения на входе модулятора
блок 24 - измерение выходного сигнала ММГ;
блок 25 - выработка решения о продолжении изменения на входе модулятора или переходе к следующей операции;
блок 26 - измерение выходного сигнала ВДТ (Vдт) и напряжения на входе модулятора;
блок 27 - аппроксимация зависимости амплитуды компенсирующего напряжения А от выходного сигнала ВДТ.
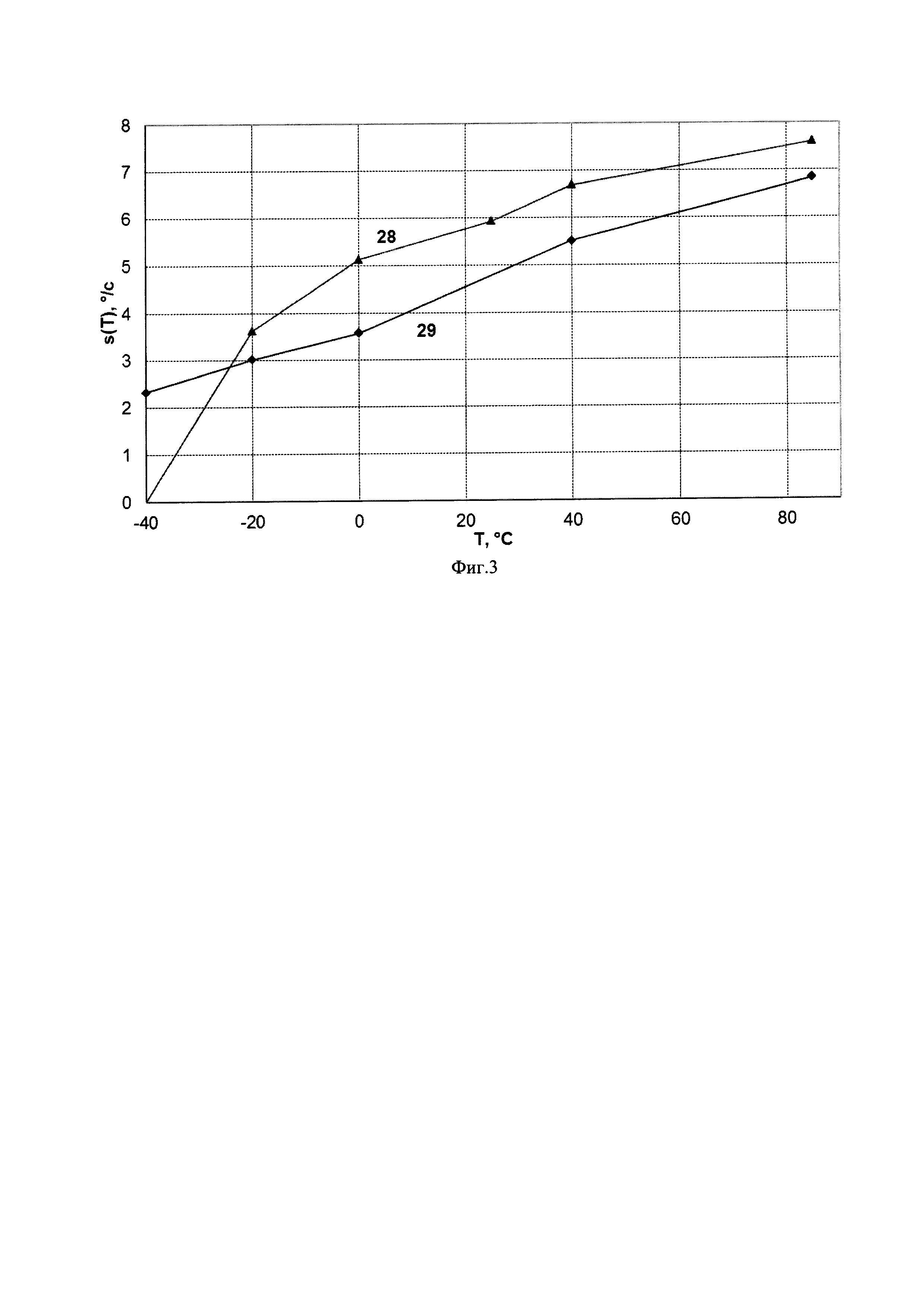
На фиг. 3 приведены экспериментально полученные зависимости синфазной помехи от температуры окружающей среды, измеряемой с помощью ВДТ, для двух образцов ММГ RR-типа.
На фиг. 3 обозначены:
s - синфазная помеха,
Т - температура, измеренная с помощью ВДТ,
s(T) - зависимость синфазной помехи от температуры,
28 - зависимость s(T) для первого ММГ,
29 - зависимость s(T) для второго ММГ.
ММГ включает в себя ЧЭ, представляющий собой ПМ 1 (или связанные между собой ПМ) на упругом подвесе с гребенчатыми (2-5), измерительными (6-8), и синфазными (9-11) электродами, КУПК 12 с блоком формирования опорных сигналов 13, канал формирования выходного сигнала 14, включающий в себя последовательно соединенные ПЕН 15 и демодулятор 16, модулятор 17, ВДТ 18, ИПН 19 и БПН 20.
Одна пара неподвижных гребенчатых электродов 2 и 3, расположенных по оси первичных колебаний с двух сторон ПМ 1 соединена со входом КУПК 12, другая пара неподвижных гребенчатых электродов 4 и 5, расположенных аналогично паре электродов 2 и 3, соединена с выходом КУПК 12. Подвижным гребенчатым электродом является ПМ 1.
Измерительные электроды образованы подвижным 6 и двумя неподвижными измерительными электродами 7 и 8, которые расположены по оси вторичных колебаний с противоположных сторон ПМ 1, а синфазные электроды образованы подвижным 9 и двумя неподвижными электродами 10 и 11, которые также расположены по оси вторичных колебаний с противоположных сторон ПМ 1.
Измерительные электроды 7 и 8 соединены со входами ПЕН 15 канала формирования выходного сигнала 14, выход которого соединен со входом демодулятора 16.
Неподвижные синфазные электроды 10 и 11 соединены с выходами модулятора 17, вход которого соединен с выходом БПН 20 и с блоком формирования опорных сигналов 13.
Выход ВДТ 18 соединен со входом БПН 20, выход которого соединен со входом модулятора 17. Выходы блока формирования опорных сигналов 13 соединены с входами для опорных сигналов модулятора 17 и демодулятора 16. ИПН 19 подключен к ПМ 1.
Компенсация синфазной помехи в ММГ осуществляется следующим образом.
При наличии первичных колебаний ПМ 1, возбуждаемых КУПК 12, ПМ 1 совершает колебания по оси вторичных колебаний в той же фазе, что и колебания, обусловленные силой Кориолиса. Эти колебания преобразуются в электрический сигнал ПЕН 15 и выходной сигнал постоянного тока демодулятором 16. Этот сигнал является частью выходного сигнала SдMMГ и может изменяться при изменении температуры окружающей среды. Эта часть выходного сигнала является смещением нуля ММГ и является важным показателем, характеризующим точность ММГ.
В ММГ на неподвижных синфазных электродах 10 и 11 модулятор 17 формирует противофазные компенсирующие напряжения с амплитудой А вида ±Acos(ωt). В случае, когда напряжение ИПН 19 равно Е, сила электрического поля Fэ определяется выражением (4). При соответствующем выборе амплитуды компенсирующего напряжения А может быть достигнута нулевая величина смещения нуля ММГ.
В предложенном способе на вход модулятора поступает преобразованный БПН 20 сигнал ВДТ 18, который обозначим Vдт. Полагая, что коэффициент преобразования входного сигнала модулятора 17 в амплитуду компенсирующего напряжения А равен 1, и обозначая зависимость между выходным и входным сигналами БПН 20 как А(Vдт), получим, что формируемая сила Fэ с учетом выражений 4-5 может быть представлена в виде:

В соответствии с предложенным способом зависимость А(Vдт), при которой достигается компенсация синфазной помехи, определяют экспериментально. После определения зависимость может быть реализована в БПН 20 с помощью аналоговых или цифровых элементов [16, 17].
При этом важно место расположения датчика температуры. Из-за возможных градиентов температур при отдаленном от ЧЭ расположении датчика температуры, ошибки в измерении температуры могут приводить к погрешностям компенсации. Датчик температуры, встроенный в ММГ, позволяет измерять температуру ЧЭ. К таким встроенным датчикам могут быть отнесены измерители температуры, основанные на измерении резонансной частоты или добротности подвеса ПМ по оси первичных колебаний [14, 15].
Последовательность операций при экспериментальном определении зависимости A(Vдт) заключается в следующем.
Блок 21. ММГ устанавливают на неподвижном основании в термокамере, ко входу модулятора взамен выхода БПН подключают управляемый источник напряжения.
Блоки 22-25. Устанавливают фиксированную температуру в термокамере и изменяют напряжение управляемого источника напряжения до получения нулевого (или минимального) сигнала на выходе канала формирования выходного сигнала 14. При наличии квадратурной помехи производят настройку блока формирования опорных сигналов 13 таким образом, чтобы вырабатываемый им опорный сигнал обеспечивал подавление демодулятором 16 квадратурной помехи, например, по известному способу [19].
Блок 26. При достижении нулевого сигнала на выходе канала формирования выходного сигнала 14 (выходной сигнал ММГ) производят измерение напряжения на выходе ВДТ 18 (Vдт) и напряжения на входе модулятора 17. Полученные данные фиксируются, например, в системе сбора данных.
После этой операции переходят к блоку 22 и изменяют температуру в термокамере на величину ΔT и повторяют операции, указанные в блоках 22-26 до тех пор, пока диапазон изменения температуры в термокамере не будет соответствовать диапазону рабочих температур ММГ.
Отметим, что уменьшение шага ΔТ позволяет получить большее количество экспериментально полученных точек зависимости A(Vдт), что обеспечивает более точную аппроксимацию этой зависимости, однако при этом возрастает продолжительность испытаний. На практике, при температурной компенсации выходных сигналов ММГ шаг ΔТ выбирается равным 5-10°С.
Блок 27. По полученным экспериментально парам значений А и Vдт определяют аналитическую зависимость А(Vдт), которую реализуют в БПН 20, выход которого соединяют со входом модулятора 17.
Экспериментальные исследования ММГ разработки АО «Концерн «ЦНИИ «Электроприбор» показали, что синфазная помеха в нем может изменяться на 8°/с при изменении температуры окружающей среды на 125°С [17]. Максимальный наклон зависимости 28 на фиг. 3 составляет 3,57°/с на 20°С или 0,18°/с на 1°С. При погрешностях аппроксимации на уровне 1% и ВДТ на уровне 0,1°С [18] погрешность компенсации составит 0,02°/с или ≈70°/ч, а для второго образца с наклоном ≈0,05°/с (зависимость 29 на фиг. 3) погрешность компенсации будет на уровне ≈20°/ч. При этом зависимость величины этой помехи от температуры окружающей среды носит монотонный характер, что позволяет при аппроксимации по 10-20 точкам снизить вносимую синфазной помехой погрешность на два порядка.
Таким образом, в ММГ, в котором реализован предложенный способ компенсации синфазной помехи, изменение температуры окружающей среды не приводит к изменению смещения нуля. Предложенный способ компенсации позволяет повысить точность ММГ и не влияет на работу ММГ при медленных изменениях измеряемой угловой скорости.
Список литературы:
1. Aranaud Walther et al. Bias Contribution in a MEMS Tuning Fork Gyroscope / Christophe Le Blanc / Journal Of Electromechanical Systems, vol. 22, №2, 2013.
2. Патент РФ №2320962.
3. Патент РФ №2344374.
4. Патент США №6067858.
5. Патент США №8104364.
6. Патент США №8266961.
7. Патент РФ №2626570
8. Патент РФ №2577369
9. М. Saukoski, "System and circuit design for a capacitive MEMS gyroscope," Ph.D. dissertation, Helsinki University of Technology, 2008.
10. Беляева Т.А. Методы компенсации квадратурной помехи в микромеханическом гироскопе RR-типа / Диссертация на соискание ученой степени кандидата технических наук: 05.13.01: ОАО "Концерн "ЦНИИ "Электроприбор", Санкт-Петербург, 2009, инв. №141187, 126 с.
11. Патент США №8151641
12. Справочник по нелинейным схемам: Проектирование устройств на базе аналоговых функциональных модулей и интегральных схем. Под ред. Шейнголд Д.Х., - М.: Мир, 1977.
13. https://www.ti.com/product/MSP430F169.
14. I.P. Prikhodko et al. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing, Sens. Actuators A: Phys. (2013), http://dx.doi.org/10.1016/j.sna2012.12.024
15. Патент РФ №2535248
16. Патент РФ №2577369
17. Некрасов Я.А., Моисеев Н.В., Люкшонков Р.Г., Павлова С.В., Улучшение эксплуатационных характеристик отечественного микромеханического гироскопа RR-типа / XXI Санкт-Петербургская международная конференция по интегрированным навигационным системам, 2014, стр. 226-235.
18. Люкшонков Р.Г. Термокомпенсация в микромеханических гироскопах с контуром стабилизации амплитуды первичных колебаний / Автореферат диссертации на соискание ученой степени кандидата технических наук, 2016, СПб, 18 стр.
19. A. Ismail et al A HIGH PERFORMANCE MEMS BASED DIGITAL-OUTPUT GYROSCOPE. Transducers 2013, Barcelona, SPAIN, 16-20 June 201
Способ управления подвесом ротора электростатического гироскопа
Способ изготовления ротора электростатического гироскопа и устройство для осуществления этого способа
Способ взвешивания ротора гироскопа в электростатическом подвесе
Датчик индукционного лага повышенной прочности
Способ определения погрешности двухстепенного гироблока
Волномерный буй с инерциальным измерительным модулем на основе микромеханических датчиков
Интегрированная инерциально-спутниковая система ориентации и навигации
Способ управления подвесом ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Устройство для измерений мгновенных угловых перемещений качающейся платформы
Микромеханический гироскоп вибрационного типа
Электродная структура для микромеханического гироскопа и микромеханический гироскоп на ее основе
Микромеханический гироскоп
Устройство крепления и отделения малого объекта (буя) от высокоскоростного подводного объекта

