Результат интеллектуальной деятельности: РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА
Вид РИД
Изобретение
Изобретение относится к военной технике, в частности к области плавающих роботизированных бронированных машин, предназначенных для выполнения различных задач в качестве средств боевого применения и средств обеспечения.
Известна боевая плавающая машина, содержащая водонепроницаемый корпус, двигатель внутреннего сгорания (ДВС), гусеничный движитель, использующийся в качестве водоходного, а также водоотражательный щит и перепускной клапан, с помощью которого отработавшие газы ДВС через дополнительный трубопровод и расположенный в нем обратный клапан перенаправляются в носовую часть плывущей машины (RU 2658197 C1, F41H 13/00, 19.06.2018).
Подача отработавших газов ДВС в переднюю часть машины приводит к созданию газовоздушной прослойки впереди машины. Это уменьшает плотность воды и ее сопротивление движению и, соответственно, обеспечивает повышение скорости движения машины на воде.
Недостатками этой машины является недостаточная скрытность вследствие шумового воздействия работающего ДВС, а также повышенная вероятность поражения машины с ее экипажем при огневом воздействии противника по причине отсутствия дистанционного и автоматизированного управления.
Известна также плавающая бронированная гусеничная машина, в состав которой входят многокапсульный герметичный корпус с десантными люками и проемом для прохода десанта, силовая установка с ДВС, гусеничный движитель с подвеской и приводом от ДВС, водоходный движитель и стрелковое оружие. В нижней неподвижной части корпуса машины смонтированы колесный движитель и водоходный движитель с рулем управления, а в передней части корпуса - поворотная башня с вооружением. Для привода водоходного движителя используется электродвигатель и аккумуляторная батарея, устанавливаемые на машину перед форсированием водной преграды (RU 2576070 С2, F41H 7/00, 27.02.2016).
Недостатком этой машины является отсутствие автономности ее работы, обусловленная применением съемных аккумуляторных батарей и приводного электродвигателя, а также повышенная вероятность поражения машины с ее экипажем при огневом воздействии противника по причине отсутствия дистанционного и автоматизированного управления.
Наиболее близкой к предложенной является плавающая бронированная гусеничная машина, способная преодолевать водные преграды как в надводном, так и в полностью погруженном положениях. Она оборудована герметичным корпусом, водоходными движителями, системой сообщения заброневого объема корпуса с атмосферой, балластными цистернами, компрессором, гидролокатором, средствами навигации и системой видеонаблюдения. Машина имеет автономную систему энергообеспечения на основе аккумуляторных батарей для осуществления возможности движения машины в полностью погруженном положении без связи с атмосферой. Датчики глубины погружения и следящая система регулирования глубины погружения и угловой стабилизации обеспечивают поддержание заданной глубины при малом запасе плавучести за счет использования водоходных движителей с изменяемым вектором тяги (RU 2326769 С2, B60F 3/00, 20.06.2008).
Недостатком этой машины является пониженная скорость и подвижность машины при преодолении водных преград, а также сложность ее выхода на неподготовленный берег, что обусловлено повышенным гидродинамическим сопротивлением движению машины в воде при ее полном погружении.
В режиме преодоления водной преграду без полного погружения в воду скорость, подвижность и возможность выхода этой машины на неподготовленный берег также остаются невысокими, поскольку в ней не предусмотрено ускорение перематывания гусениц при переходе от передвижения по суше к движению на воде и, соответственно, не предусмотрено максимальное возможное использование мощности ДВС и водоходных свойств гусениц для создания тягового усилия и уменьшения радиуса проворота машины при ее движении на воде. Не предусмотрен также режим глиссирования машины по воде.
Задачей настоящего изобретения является создание роботизированной плавающей машины, обладающей повышенной скоростью передвижения и маневренностью и облегченным выходом на неподготовленный берег.
Техническим результатом предложенного изобретения является повышение скорости и подвижности машины на воде при преодолении водных преград и облегчение ее выхода на неподготовленный берег.
Поставленная задача решается благодаря тому, что роботизированная плавающая машина содержит водонепроницаемый корпус, гусеничный и/или колесный движитель, который может использоваться в качестве водоходного, дополнительный водоходный движитель, который может быть установлен в дополнение к гусеничному и/или колесному движителю, а также водоотражательный щит и/или водооткачивающее средство, бортовой источник энергии - аккумуляторную батарею и/или двигатель внутреннего сгорания (ДВС) с генератором, силовую передачу и систему автоматизированного и/или дистанционного управления силовой передачей, и/или ДВС, и/или водооткачивающим средством, и/или водоотражательным щитом, причем силовая передача содержит по меньшей мере один тяговый электродвигатель, преобразующий электрическую энергию бортового источника питания в механическую энергию, и по меньшей мере одну механическую передачу с переменным (переключаемым) передаточным отношением, передающую механическую энергию по меньшей мере от одного тягового электродвигателя на гусеничный, и/или колесный, и/или водоходный движитель.
В частных случаях реализации машины поставленная задача решается благодаря тому, что:
- корпус машины выполнен бронированным;
- гусеничный движитель, приспособленный для использования в качестве водоходного, имеет гидродинамические кожуха, закрывающие верхние ветви гусениц, и/или лопатки, и/или развитые грунтозацепы;
- гусеничный движитель имеет регулируемую подвеску, обеспечивающую уменьшение дорожного просвета машины при ее движении на воде;
- гусеничный движитель и силовая передача реализованы из условия обеспечения динамической реакции воды, действующей на гусеницы, достаточной для глиссирования машины по воде;
- механическая передача имеет переменное (переключаемое, управляемое) передаточное отношение, обеспечивающее возможность увеличения скорости гусеничного и/или колесного движителя при движении машины на воде;
- водоходный движитель выполнен в виде одного или нескольких водометных движителей или гребных винтов, установленных в кормовой части машины и имеющих механический, или гидрообъемный, или электромеханический привод от ДВС, от тяговых электродвигателей, от гусеничного или колесного движителя или от дополнительно установленных электродвигателей водоходного движителя;
- привод водометного движителя (движителей) или гребного винта (винтов) содержит редуктор и/или управляемую муфту;
- система автоматизированного и/или дистанционного управления содержит контроллер или группу контроллеров, преимущественно микропроцессорных, силовая часть которых реализована на силовых транзисторах и/или транзисторных модулях, а также средство связи по радиоканалу, проводной линии связи и/или оптоволоконному кабелю, бортовые датчики и исполнительные механизмы силовой передачи, и/или ДВС, и/или водооткачивающего средства, и/или волноотражательного щита, и/или водоходного движителя. В состав бортовых датчиков могут входить акселерометры и гироскопы бесплатформенной системы инерциальной навигации, ультразвуковые, стерео-визуальные, курсо-одометрические,радиолокационные, магнитометрические датчики, датчики продольного и поперечного крена машины, приемники глобальной спутниковой навигации, датчики рабочих параметров силовой передачи, функционального оборудования, ДВС и/или водоходного движителя. Контроллер или группа контроллеров осуществляют отслеживание окружающей обстановки и/или определяют текущее местоположение машины путем обработки выходных сигналов бортовых датчиков, а также реализуют алгоритмы автоматизированного и/или дистанционного управления движением машины (силовой передачей и ДВС) и/или работы ее функционального оборудования;
- функциональное оборудование, для установки которого приспособлена машина, выполнено в виде грузоподъемного механизма, и/или комплекса вооружения, и/или пускового оборудования установки взрывного разминирования, и/или оборудования для тушения пожаров, и/или оборудования для копания и перемещения грунта, причем система автоматизированного и/или дистанционного управления приспособлена для управления этим функциональным оборудованием.
Указанные альтернативные отличительные признаки независимого и зависимых пунктов формулы изобретения находятся в прямой причинно-следственной связи с достигаемым техническим результатом, поскольку их реализация обеспечивает повышение скорости и подвижности машины на воде при преодолении водных преград, а также облегчение ее выхода на неподготовленный берег.
Реализация отличительного признака, характеризующегося применением в силовой передаче механической передачи с переменным (переключаемым) передаточным отношением, установленной между тяговым электродвигателем и гусеничным и/или колесным движителем или бортовыми (колесными) редукторами, позволяет увеличить скорость перемотки гусениц или вращения колес при переходе от передвижения по суше к движению на воде. Благодаря этому увеличивается передача мощности бортового источника энергии на гусеницы или колеса, что приводит к увеличению создаваемого ими тягового усилия и уменьшению радиуса проворота машины при ее движении на воде, что обеспечивает повышение скорости и подвижности машины на воде. Повышение скорости движения машины на воде приводит к соответствующему увеличению ее кинетической энергии пропорционально квадрату этой скорости, к увеличению сил инерции и соответствующему облегчению выхода машины на неподготовленный берег.
Реализация этого отличительного признака на плавающей машине с высокой энергонасыщенностью, а именно - повышение скорости перемотки гусениц или вращения колес путем уменьшения передаточного отношения механической передачи, позволяет получить режим глиссирования машины по воде, при котором машина удерживается на ее поверхности только за счет скоростного напора воды (гидродинамических сил). «Скольжение» по воде обеспечивает резкое снижение сопротивления движению машины с соответствующим увеличением скорости ее передвижения и улучшением маневренности. Машина, в которой реализовано автоматизированное управление скоростью перемотки гусениц или вращения колес, может в режиме глиссирования без остановки на высокой скорости выходить на берег, покрытый песком, льдом, травой и т.д., а затем возвращаться на воду. Благодаря этому обеспечивается максимально простой («бесшовный») выход машины с воды на неподготовленную поверхность берега и обратно.
Реализация отличительного признака, характеризующегося применением в силовой передаче механической передачи с переменным (переключаемым, регулируемым) передаточным отношением, установленной между тяговым электродвигателем и водоходным движителем в сочетании с применением системы автоматизированного управления этой передачей, обеспечивает реализацию режима максимально возможной передачи мощности от бортового источника энергии на водоходный движитель, что также обеспечивает повышение скорости и подвижности машины на воде при преодолении водных преград, а также облегчение ее выхода на неподготовленный берег.
Применение механической передачи с переменным (переключаемым) передаточным отношением, установленной, например, между тяговым электродвигателем и бортовым редуктором гусеничной или колесной машины, позволяет также уменьшить массу электродвигателей и машины в целом, что приводит к уменьшению глубины погружения ее корпуса в воду и к соответствующему уменьшению гидродинамического сопротивления воды, что также обеспечивает достижение указанного технического результата.
Реализация отличительного признака зависимого пункта формулы изобретения, характеризующегося применением бронирования корпуса машины, обеспечивает достижение указанного технического результата за счет того, что применение бронирования, особенно днища машины, позволяет повысить скорость движения и подвижность машины за счет исключения опасности ее повреждения в результате столкновений с препятствиями, скрытыми под водой, а также обеспечивает облегчение выхода машины на неподготовленный берег за счет действия сил инерции при этом выходе.
Благодаря реализации следующего отличительного признака, согласно которому гусеничный движитель, приспособленный для использования в качестве водоходного, имеет гидродинамические кожуха, закрывающие верхние ветви гусениц, лопатки или развитые грунтозацепы, особенно в сочетании с реализацией первого отличительного признака - уменьшением передаточного отношения механической передачи, достигается повышение передачи мощности бортового источника энергии на гусеницы, увеличение их тягового усилия при движении машины на воде, что также обеспечивает повышение скорости и подвижности машины на воде при преодолении водных преград и облегчение ее выхода на неподготовленный берег.
Реализация регулируемой подвески гусеничного движителя дает возможность уменьшить дорожный просвет машины при ее движении на воде. Занижение корпуса машины повышает ее устойчивость и, соответственно, обеспечивает повышение скорости и подвижности машины на воде и облегчение ее выхода на неподготовленный берег.
Реализация водоходного движителя в виде нескольких водометных движителей (водометов) или гребных винтов, установленных в кормовой части машины и имеющих механический, гидрообъемный, электромеханический привод от ДВС, от тяговых электродвигателей, от гусеничного или колесного движителя или от дополнительно установленных электродвигателей, позволяет осуществлять независимое управление каждым водометом или винтом из условия передачи максимально возможной мощности бортового источника энергии на водоходный движитель, а также регулирование вектора его тяги. Это также обеспечивает достижение указанного технического результата.
Применение в приводе водометного движителя (движителей) или гребного винта (винтов) редуктора и/или управляемой муфты, предусмотренное следующим отличительным признаком зависимого пункта формулы изобретения, позволяет улучшить управление водоходным движителем, что обеспечивает дополнительное улучшение указанного технического результата.
Реализация системы автоматизированного и/или дистанционного управления в виде контроллера (группы контроллеров), средства связи и комплекта бортовых датчиков обеспечивает возможность отслеживания окружающей обстановки и определение текущего местоположения машины с последующей реализацией алгоритмов ее автоматизированного и/или дистанционного управления. Благодаря этому повышается точность и оперативность формирования сигналов управления силовой передачей, ДВС и функциональным оборудованием машины, что также обеспечивает повышение скорости, подвижности машины на воде и облегчение ее выхода на неподготовленный берег.
Реализация последнего отличительного признака изобретения, характеризующегося установкой на машину грузоподъемного механизма, комплекса вооружения, пускового оборудования установки взрывного разминирования, оборудования для тушения пожаров, оборудования для копания и перемещения грунта, или другого функционального оборудования, обладающего высокой вибро- и ударопрочностью, в сочетании с реализацией алгоритмов автоматизированного и/или дистанционного управления этим оборудованием, позволяет снять ограничения на максимально-допустимые линейные и угловые ускорения, возникающие при движении машины, что также обеспечивает достижение указанного технического результата.
В роботизированной плавающей машине реализация одного (любого) из указанных отличительных признаков не препятствует реализации любого другого альтернативного отличительного признака. Например, корпус машины может быть выполнен бронированным независимо от наличия или отсутствия в силовой передаче механической передачи с переменным (переключаемым) передаточным отношением. Равным образом, гусеничный движитель, независимо от наличия такой передачи и бронирования корпуса, может иметь или не иметь гидродинамические кожуха, лопатки, развитые грунтозацепы и т.д. Поэтому в машине может быть реализован как один из указанных альтернативных отличительных признаков независимого и зависимых пунктов формулы изобретения, так и одновременно несколько отличительных признаков в их любом сочетании, причем от количества реализованных отличительных признаков зависит уровень достижения указанного технического результата.
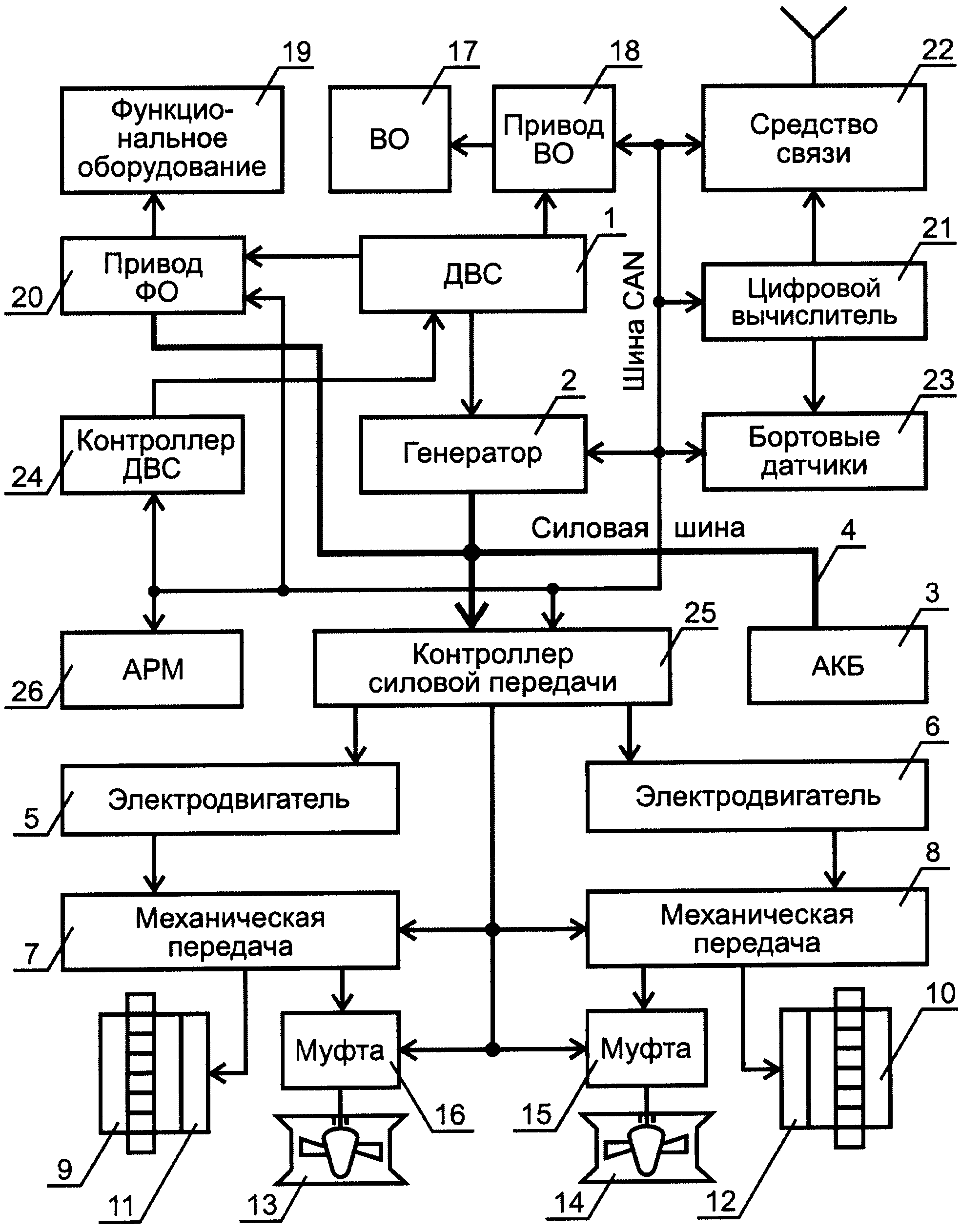
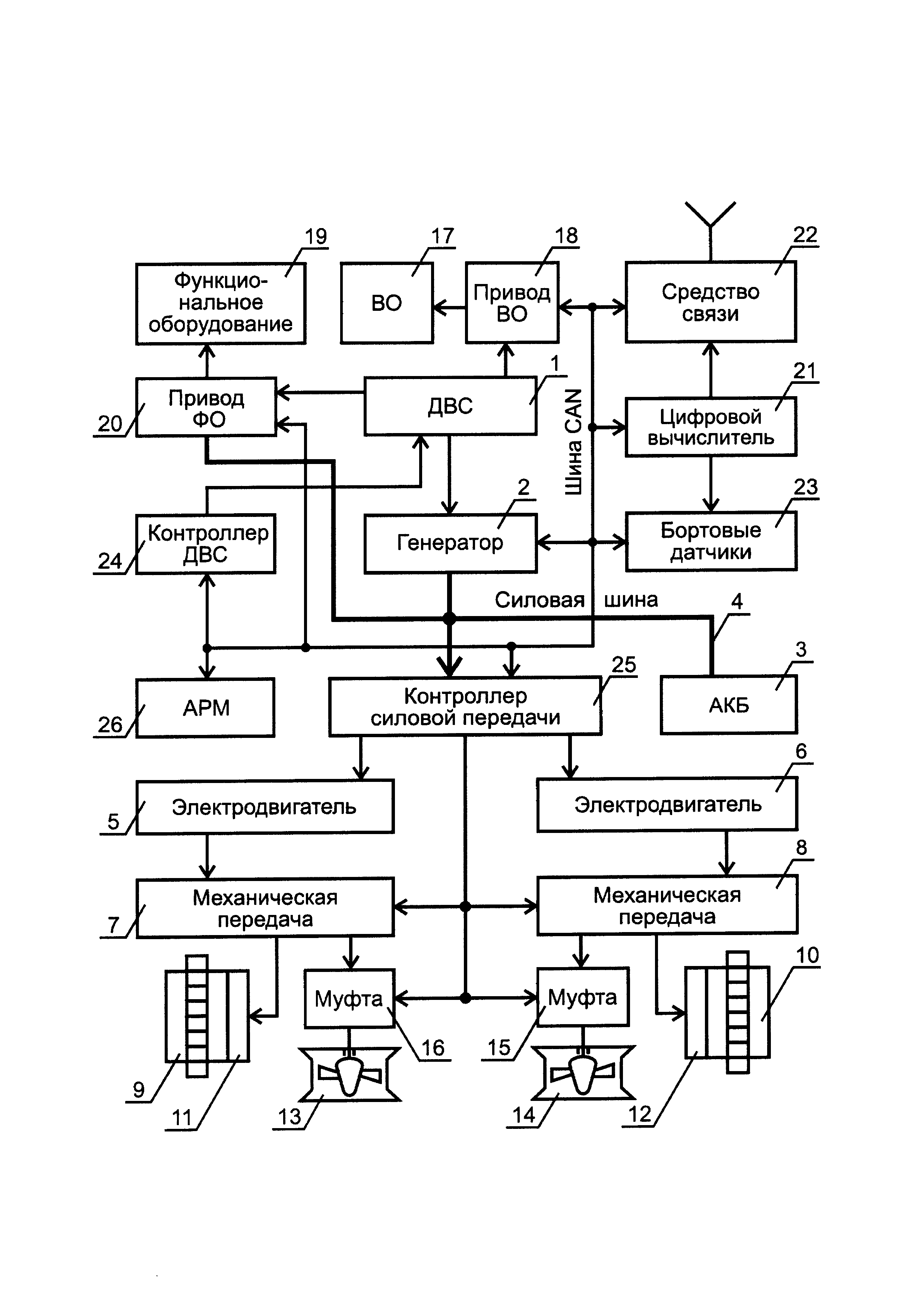
Техническая сущность и принцип действия предложенного устройства поясняются чертежом, на котором в качестве примера осуществления заявляемого изобретения показана упрощенная функциональная схема роботизированной гусеничной машины.
Предложенная машина содержит водонепроницаемый несущий корпус, водоизмещение которого обеспечивает ее поддержание на плаву в надводном положении. Корпус служит для размещения и защиты экипажа, личного состава и раненых, а также агрегатов, механизмов и систем машины и ее функционального оборудования. Для достижения требуемой степени защищенности в условиях ограничений по массе корпус может быть выполнен из легких броневых сплавов.
Бортовой источник энергии содержит двигатель внутреннего сгорания (ДВС) 1 (с обслуживающими системами питания топливом и воздухом, смазки, охлаждения, подогрева и запуска), и соединенный с ним генератор 2, либо аккумуляторную батарею (АКБ) 3, либо одновременно ДВС с генератором и АКБ.
ДВС соединен с генератором 2 непосредственно или через мультипликатор, упругую муфту и т.п.
На машине может быть установлен генератор любого типа - асинхронный, вентильный с постоянными магнитами на роторе, вентильно-индукторный и т.д. Он может иметь как жидкостное, так и воздушное охлаждение. Силовой выпрямитель, инвертор или преобразователь генератора, а также регулятор его выходного напряжения, могут быть размещены в одном корпусе с этим генератором (показано на чертеже), либо выполнены в виде отдельных устройств.
Если электрическая часть генератора выполнена в виде инвертора или преобразователя, обеспечивающего коммутацию его обмоток, то генератор 2 может работать в режиме электродвигателя при запуске ДВС 1 и при торможении машины двигателем.
Генератор осуществляет преобразование механической энергии ДВС в электрическую энергию, передаваемую на силовые шины 4, например, с номинальным напряжением 275 или 540 В постоянного тока.
В приведенном примере используется последовательная кинематическая схема моторно-трансмиссионной установки машины, которая исключает механическую связь ДВС с гусеничным или колесным движителем.
В этом случае силовая передача содержит тяговые электродвигатели 5, 6. Их выходные валы с помощью механических передач 7, 8 непосредственно или через дополнительные передаточные устройства соединены с ведущими звездочками или ведущими колесами 9, 10 гусеничного или колесного движителя.
Механические передачи 7, 8 могут иметь два или более различных передаточных отношений, либо плавно регулируемое передаточное отношения, реализуемое с помощью вариатора. Изменение (переключение) передаточного отношения может осуществляться оператором вручную или автоматически с помощью зубчатых муфт, фрикционов и т.п.и соответствующих исполнительных механизмов.
Механические передачи 7, 8 могут один входной и один выходной валы, а также один входной и два выходных вала с различными, в том числе управляемыми (переключаемыми, переменными) передаточными отношениями, использующиеся для приводов сухопутного и водоходного движителей.
Тяговые электродвигатели могут иметь любую конструкцию. Предпочтительно применение реактивных индукторных электродвигателей. Они могут быть встроены в ступицы ведущих колес или размещены внутри обвода гусениц, либо размещены в корпусе машины и соединены с ними через передаточные устройства (карданные валы, муфты и т.п.). Между выходными валами механических передач 7, 8 и ведущими звездочками или колесами 9, 10 могут быть установлены бортовые или колесные редукторы и/или тормоза 11, 12.
Возможна реализация машины с одним тяговым электродвигателем. В этом случае силовая передача, с помощью которой осуществляется передача механической энергии от тягового электродвигателя на ведущие колеса или гусеницы, кроме указанной одной механической передачи или механических передач (по числу гусениц или ведущих колес) и бортовых редукторов (в случае необходимости) содержат главную передачу с бортовыми фрикционами и тормозами 11, 12, либо с дифференциальным механизмом, обеспечивающим возможность поворота машины.
Возможна также реализация силовой передачи (передач), имеющей более двух тяговых электродвигателей, использующихся для привода всех 4-х или более ведущих колес или гусениц машины.
Гусеничный или колесный сухопутный движитель предназначен прежде всего для преобразования вращательного движения выходных валов механических передач 7, 8, либо бортовых редукторов 11, 12, в поступательное движение машины. Движение на плаву может обеспечиваться за счет перематывания гусениц или вращения ведущих колес. При этом гусеничный движитель, использующийся в качестве водоходного, может иметь гидродинамические кожуха, закрывающие верхние ветви гусениц, лопатки или развитые грунтозацепы.
При достаточно большой мощности ДВС гусеничный движитель и силовая передача могут быть выполнены таким образом, что динамическая реакция воды на гусеницы окажется достаточной для глиссирования машины по воде. Это достигается путем применения мелкозвенчатых гусениц, соответствующего выбора формы и размеров ее грунтозацепов, а также повышения скорости перемотки гусениц за счет уменьшения передаточного отношения механических передач 7, 8.
Для повышения скорости движения машины на воде возможно также применение водоходного движителя, например, водометов или гребных винтов 13, 14, установленных в кормовой части машины. Каждый из них состоит, в частности, из водозаборной трубы, редуктора, выходной трубы со спрямляющим аппаратом и рабочего колеса (лопастного винта). При работе машины на суше заборные отверстия водометных движителей закрываются крышками. Машина может быть также оборудована рулями управления, размещенным в кормовой части плавающей машины и обеспечивающими реализацию водоходных движителей с изменяемым вектором тяги.
Для их привода от тяговых электродвигателей 5, 6 используются механические передачи 7, 8, имеющие один входной и два выходных вала, а также управляемые или неуправляемые фрикционные муфты 15, 16 с механическим, электромеханическим или электрогидравлическим управлением, карданные валы и т.д.
Кроме привода от тяговых электродвигателей 7, 8, возможна также реализация механического, гидрообъемного или электромеханического привода водометов или гребных винтов непосредственно от ДВС, от гусеничного или колесного движителя или от дополнительно установленного электродвигателя (электродвигателей) водоходного движителя. Такой привод также может содержать механическую передачу (редуктор) с переменным (переключаемым, управляемым) передаточным отношением и/или управляемую муфту, позволяющие отключить водоходный движитель при движении машины на суше.
Гусеничный движитель может иметь пневматическую подвеску с электрогидравлическим или электромеханическим устройством регулирования клиренса машины с фиксируемыми рабочими положениями. Такая регулировка обеспечивает возможность уменьшения дорожного просвета (клиренса) машины при ее движении на воде.
Машина оснащена водооткачивающим средством (устройством) 17, содержащим, в частности, отсечной клапан, водозаборную трубу с обратным клапаном, механический, пневматический, или гидравлический привод 18 от ДВС (показано на чертеже), либо электромеханический привод (электродвигатель водооткачивающего устройства (помпы) с контроллером), подключенный к силовым шинам 4.
На машину устанавливается также водоотражательный (волноотражательный) щит (щиток) с приводом любого вида.
Для управления этими устройствами используется соответствующий исполнительный механизм. В частности, возможна реализация электромеханического привода, подключенного к силовым шинам 4.
Функциональное оборудование 19, устанавливаемое на машину, может быть выполнено в виде грузоподъемного механизма, и/или комплекса вооружения, и/или пускового оборудования установки взрывного разминирования, и/или оборудования для тушения пожаров, и/или оборудования для копания и перемещения грунта.
Для размещения комплекса вооружения, например пулемета, в передней части корпуса может быть смонтирована поворотная башня. Пулемет может быть в составе дистанционно управляемого боевого модуля, стабилизированого в двух плоскостях и оснащенного лазерным дальномером и телевизионным и тепловизионным прицелом, который может использоваться как для самообороны, так и для наблюдения при управлении движением машины.
Привод функционального оборудования 20 может быть механическим, гидравлическим или пневматическим, в том числе от ДВС (показан на чертеже) или от дополнительного электродвигателя с контроллером функционального оборудования, получающего энергию от силовых шин 4.
Система автоматизированного и/или дистанционного управления машиной, включая ее функциональное оборудование, может именоваться также системой контроля, защиты и управления, системой электрооборудования и т.д. В общем случае она включает в себя высоковольтную и низковольтную части этой системы. Ее информационную основу составляет цифровой вычислитель 21, который может именоваться также контроллером верхнего уровня, блоком управления, бортовой ЭВМ, информационно-управляющим блоком и т.п.
Термин «автоматизированная», в отличие от термина «автоматическая», подчеркивает сохранение за человеком-оператором некоторых функций, либо не поддающихся автоматизации, либо имеющих общий целеполагающий характер.
В состав системы управления входят также средство связи 22 машины со стационарным постом управления по радиоканалу, проводной линии связи или по оптоволоконному кабелю, бортовые датчики 23, контроллер ДВС 24, контроллер силовой передачи 25 и автоматизированное рабочее место (АРМ) оператора или двух операторов (командира, механика-водителя, наводчика и т.п.) 26.
В состав АРМ входят органы управления движением машины (джойстики или штурвал для поворота машины на суше и на плаву), органы управления ДВС, функциональным оборудованием 19, водооткачивающим средством, водоотражательным щитом, световыми приборами и т.д., а также дисплей и/или набор световых индикаторов для отображения режимов работы машины, а также диагностических и аварийных сигналов.
Все указанные электронные блоки могут быть выполнены в общем корпусе в виде единого контроллера (электронного блока, управляющего блока, шкафа управления и т.п.), либо в разных корпусах. Каждый из них в общем случае содержит информационную часть, реализованную на основе микроконтроллера или цифрового сигнального процессора, интерфейсные схемы, обеспечивающие согласование входных/выходных цепей микроконтроллеров с линиями связи и, в случае необходимости, с бортовыми датчиками 23, а также силовую часть, реализованную на силовых транзисторах и/или транзисторных модулях и обеспечивающую формирование и передачу сигналов необходимой мощности на обмотки электродвигателей 5, 6, исполнительные механизмы силовой передачи (механических передач 7, 6, тормозов 11, 12 и т.д.), ДВС, привода водооткачивающего средства 18, волноотражательного щита и водоходного движителя (муфт 15, 16 водометов или винтов 13, 14).
Контроллеры могут именоваться также блоками управления, управляющими устройствами, блоками входов и нагрузок, информационно-управляющими блоками или устройствами и т.д.
Контроллер силовой передачи 25, который может именоваться силовым преобразователем, инвертором и т.д., предназначен для преобразования постоянного напряжения бортового источника энергии (напряжения на силовых шинах 4) в переменное напряжение или в однополярные импульсы, которые поступают на фазные обмотки тяговых электродвигателей 5, 6. Силовые электронные ключи, входящие в его состав, выполнены преимущественно на биполярных транзисторах с изолированным затвором (БТИЗ, IGBT) или в виде модулей, реализованных на основе IGBT (БТИЗ) транзисторов, и имеют гальванически развязанные драйверы этих транзисторов (модулей). Для двух тяговых электродвигателей 5, 6 может использоваться один контроллер (инвертор, преобразователь, коммутатор) силовой передачи 25 (показано на чертеже). Для работы с каждым тяговым электродвигателем может устанавливаться отдельный контроллер. Возможна также установка нескольких контроллеров на один тяговый электродвигатель, например, при дроблении мощности по секциям его статора.
Для управления функциональным оборудованием 19 и его приводом 20 может использоваться контроллер, встроенный в это функциональное оборудование или в его привод 20, либо отдельный контроллер функционального оборудования.
В состав бортовых датчиков 23 в общем случае входят акселерометры и гироскопы бесплатформенной системы инерциальной навигации, ультразвуковые, стерео-визуальные (неподвижно установленные или дистанционно управляемые видеокамеры с приводами наведения), курсо-одометрические, радиолокационные, магнитометрические датчики, датчики продольного и поперечного крена машины, приемники глобальной спутниковой навигации, а также датчики рабочих параметров силовой передачи, функционального оборудования, ДВС, водооткачивающего средства и водоходного движителя.
Контроллеры (электронные блоки) системы автоматизированного и/или дистанционного управления обладают ресурсами (вычислительной мощностью, объемом памяти программ и данных, аналого-цифровыми преобразователями и т.д.), достаточными для обработки выходных сигналов бортовых датчиков 23 и последующего отслеживания окружающей обстановки, определения текущего местоположения машины, а также реализации алгоритмов автоматизированного и/или дистанционного управления движением машины и работы ее функционального оборудования.
Линии передачи информационных сигналов между контроллерами 24, 25, цифровым вычислителем 21, бортовыми датчиками 23, автоматизированным рабочим местом оператора 26 и средством связи 22 могут быть выполнены с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров) 17, ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п. Возможно также соединение отдельных функциональных узлов системы управления, в том числе их подключение к цифровому вычислителю 21 и к бортовым датчикам 23, с помощью отдельных проводов.
К силовой шине 4 может быть подключен емкостный или инерциальный накопитель энергии, реализованный, соответственно, на основе конденсаторов или вращающегося маховика, а также тормозной резистор с соответствующим устройством управления, обеспечивающий поглощение электрической энергии при динамическом торможении машины тяговыми электродвигателями 5, 6 во время движения машины на затяжном спуске.
Работа предлагаемого устройства происходит следующим образом.
В положении «на плаву» бронированная машина в горизонтальном положении частично или полностью погружена в воду и ее забронированный объем сообщается с атмосферой посредством воздухопитающей трубы, через которую подается воздух для дыхания членов экипажа (в режиме управления из машины), а также для обеспечения работы ДВС (при его наличии на машине) и компрессора, подающего воздух в надувные поплавки (при их наличии).
Первичным источником энергии для движения машины и для работы ее функционального оборудования 19 является бортовой источник энергии.
Цифровой вычислитель (контроллер верхнего уровня) 21, выполняющий функции ведущего устройства системы управления машины, работает по программе, предварительно записанной в его энергонезависимую память и координирует работу всех составных частей машины, осуществляя информационное взаимодействие с ними по шине CAN.
Запуск ДВС (при его наличии на машине) осуществляется либо дистанционно с использованием средства связи 22, либо оператором (механиком-водителем) с помощью ключа запуска ДВС, размещенного на АРМ 26. Сигнал запуска ДВС от цифрового вычислителя (контроллер) 21 по шине CAN поступает на контроллер ДВС 24, осуществляющий формирование сигналов запуска его стартера и подачи топлива.
При движении машины по воде оператор в режиме дистанционного управления, либо механик-водитель, воздействуя на соответствующий орган управления, поднимает водоотражательный щиток.
Для передвижения машины на плаву используется поступательное движение гусениц или вращение ведущих колес. Нижними ветвями гусениц или нижними частями ведущих колес создается поток воды, направленный в сторону, противоположную движению. Для уменьшения силы сопротивления движению, создаваемой потоком воды от верхней ветви гусеницы, и соответствующего увеличения скорости движения машины на воде, верхняя ветвь гусениц закрывается специальными гидродинамическими кожухами или крыльями. С этой же целью гусеница может быть оснащена лопатками или развитыми грунтозацепы.
Поворот на воде осуществляется за счет разницы в скоростях перематывания гусениц или вращения ведущих колес левого и правого борта машины.
При движении машины на воде осуществляется уменьшение передаточного отношения ее механических передач 7, 8. Это приводит к увеличению скорости перематывания гусениц или вращения колес, к увеличению силы тяги на воде и, соответственно, к увеличению скорости движения и подвижности машины.
В случае высокой энергонасыщенности машины осуществляется ее переход в режим глиссирования по поверхности воды.
В случае применения на машине тяговых электродвигателей 5, 6 с ограниченным диапазоном скоростей вращения их роторов, в котором сохраняется необходимая выходная мощность этих электродвигателей, изменение передаточного отношения механических передач 7, 8 позволяет обеспечить более высокую скорость передвижения машины не только на воде, но и по суше. В этом случае первая передача с повышенным передаточным отношением обеспечивает высокое тяговое усилие машины при одновременном уменьшении массы тяговых электродвигателей. Затем, по мере увеличения скорости движения машины по суше, осуществляется уменьшение передаточного отношения механических передач 7, 8. В этом случае для достижения необходимой скорости движения машины требуется меньшая скорость вращения роторов тяговых электродвигателей. Поскольку максимальная скорость вращения роторов тяговых электродвигателей ограничена, применение механических передач 7, 8 с переменным передаточным отношением позволяет повысить максимальную скорость движения воды не только на воде, но и на суше.
Для дальнейшего повышения скорости и подвижности машины на воде и облегчения ее выхода на неподготовленный берег используется водоходный движитель, выполненный в виде водометов или гребных винтов 13, 14. Управление ими осуществляется дистанционно или в автоматизированном режиме с помощью цифрового вычислителя 21, контроллера силовой передачи 25 и муфт 15, 26.
В начале движения машины оператор с помощью АРМ 20 или дистанционно задает ее скорость, направление движения, маршрут (траекторию движения) или его конечную точку. Далее цифровой вычислитель (контроллер) 21 путем обработки выходных сигналов бортовых датчиков 23 осуществляет отслеживание окружающей обстановки машины, определяет ее текущее местоположения, а также формирует и передает по шине CAN на другие функциональные устройства системы управления сигналы движением машины и работы ее функционального оборудования. В случае необходимости - в обход выявленных препятствий.
При потере связи и невозможности достижения конечной точки маршрута при движении машины в режиме дистанционного управления цифровой вычислитель (контроллер) 21 формирует сигналы управления движением машины из условия ее автоматического возврата в начальную точку траектории движения по ранее пройденному пути.
Одновременно цифровой вычислитель (контроллер) 21 с помощью бортовых датчиков 23 осуществляет контроль рабочих режимов узлов и агрегатов и обеспечивает их защиту от аварийных режимов путем передачи аварийных сигналов отключения на соответствующие контроллеры и формирования предупреждающих информационных сигналов, поступающих на АРМ 26 по шине CAN и на внешний пост дистанционного управления через средство связи 22.
Например, если при движении на воде крен или дифферент машины превысят пороговое значение, то цифровой вычислитель после обработки сигналов датчиков продольного и поперечного наклона машины, входящих в состав бортовых датчиков 23, формирует сигналы на открытие/закрытие впускных или выпускных клапанов надувных поплавков или на перемещение функционального оборудования 19, обеспечивая стабилизацию положения машины на плаву.
При наличии воды в корпусе машины, выявляемой соответствующим датчиком 23, цифровой вычислитель (контроллер) 21 осуществляет формирование и передачу по шине CAN сигнала автоматического включение привода 18 водооткачивающего устройства (помпы) 17.
Для специалистов в данной области техники также понятно, что кроме описанных вариантов роботизированной плавающей машины возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины

