Результат интеллектуальной деятельности: Малогабаритная адаптивная курсовертикаль
Вид РИД
Изобретение
Изобретение относится к навигационным приборам и может найти применение в навигационных системах морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) путем оптимизации адаптивной непрерывной коррекции курсовертикали, в том числе и в условиях маневра. В бесплатформенной курсовертикали углы рыскания, крена и тангажа вычисляют по информации от датчиков угловых скоростей и магнитометрических датчиков, как отклонения от опорной системы координат, которая определяется перед взлетом при помощи акселерометров и гироскопов.
Известна система определения пространственной ориентации и курса летательного аппарата, патент РФ 2427799, МПК G01C 21/00, 27.08.2011 г., бюл. №24, принятая нами в качестве прототипа.
Известное изобретение содержит блок датчиков угловой скорости, блок датчиков линейного ускорения, трехкомпонентный магнитометр, подключенные через аналого-цифровой преобразователь (АЦП) к вычислителю, логический блок с устройствами обработки аналоговых и цифровых сигналов, подключенные через логическое устройство к вычислителю, имеющему в составе запоминающее устройство. Работа данного устройства основана на способе, заключающемся в использовании информации с блоков датчиков угловой скорости, датчиков линейного ускорения, трехкомпонентного магнитометра и признака нахождения ЛА на земле или в полете.
Недостатком данного устройства является сравнительно низкая точность определения углов и отсутствие возможности включения режимов коррекции при маневрах.
Целью изобретения является расширение функциональных возможностей и повышение точности определения углов пространственной ориентации в условиях активного маневрирования.
Указанная цель достигается путем использования малогабаритной адаптивной курсовертикали, содержащей трехкомпонентный блок датчиков угловых скоростей (БДУС), трехкомпонентный блок датчиков линейных ускорений (БДЛУ), соединенные с первым и вторым входами адаптивной гировертикали, к выходу которой подключен вычислительный блок, и трехкомпонентный магнитометрический датчик, дополнительно содержит блок определения и списания магнитной девиации, последовательно соединенные блок датчиков воздушных давлений, блок определения воздушной скорости, дифференцирующий и фильтрующий блок, соединенные, в свою очередь, с третьим входом адаптивной гировертикали, блок оптимизации коэффициентов фильтра, соединенный с четвертым входом адаптивной гировертикали и подключенный к первому выходу вычислительного блока, ко второму входу вычислительного блока последовательно подключены блок трехкомпонентного магнитометрического датчика и блок определения и списания магнитной девиации, второй выход вычислительного блока является выходом малогабаритной адаптивной курсовертикали.
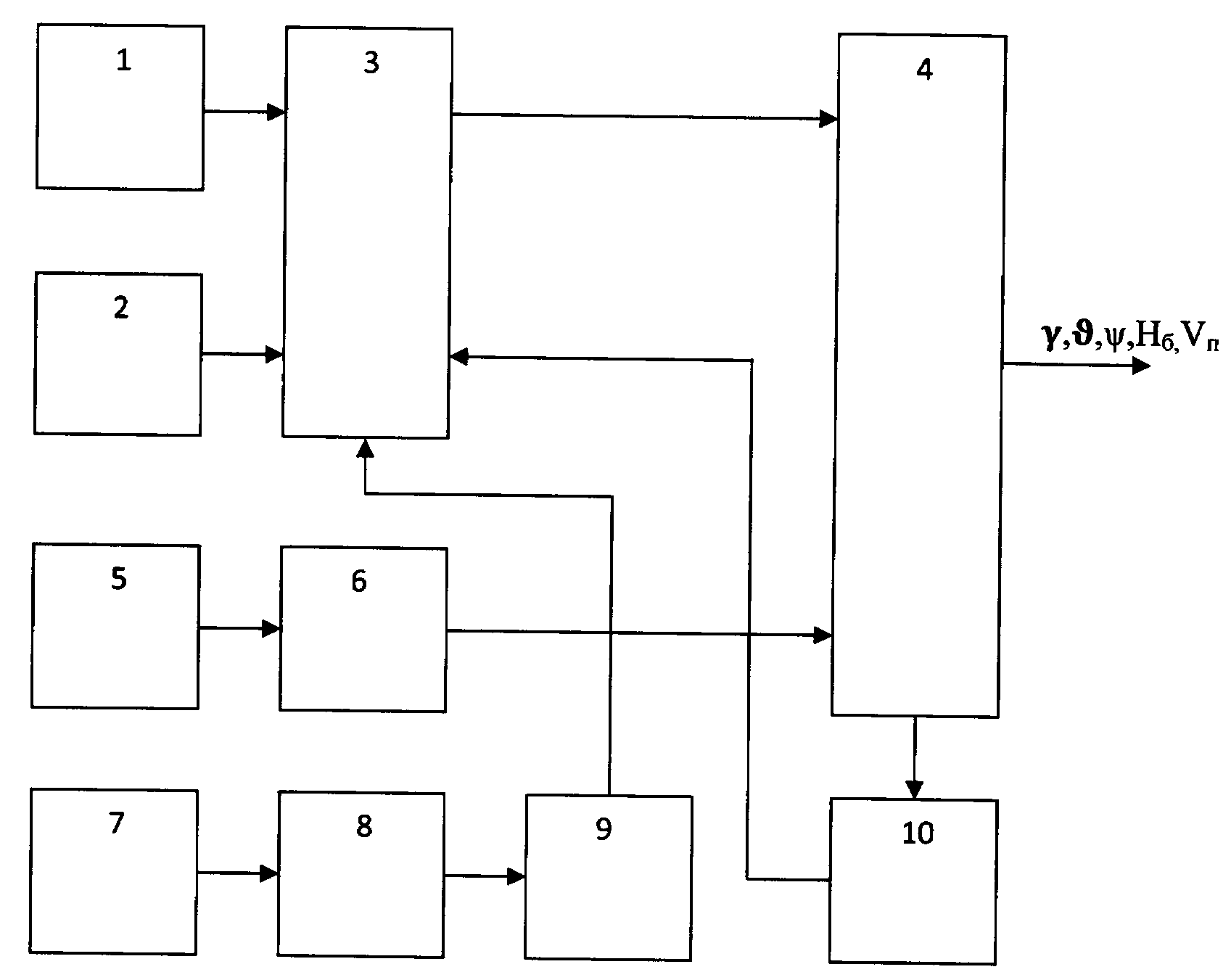
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства.
Предлагаемая малогабаритная адаптивная курсовертикаль (МАКВ) содержит:
Трехкомпонентный блок 1 датчиков угловых скоростей (БДУС), трехкомпонентный блок 2 датчиков линейных ускорений (БДЛУ), адаптивная гировертикаль 3, вычислительный блок 4, трехкомпонентный магнитометрический датчик 5, блок 6 определения и списания магнитной девиации, блок 7 датчиков воздушных давлений, блок 8 определения воздушной скорости, дифференцирующий и фильтрующий блок 9, блок 10 оптимизации коэффициентов фильтра.
Ниже приведено описание работы заявляемого устройства.
Трехкомпонентный блок 1 датчиков угловых скоростей (БДУС), трехкомпонентный блок 2 датчиков линейных ускорений (БДЛУ) выдают сигналы пропорциональные угловым скоростям и линейным ускорениям в связанной с ЛА системе координат (СК). В блоке 3 адаптивной гировертикали определяют углы крена и тангажа и осуществляют коррекцию по сигналам от БДЛУ. В рассматриваемом устройстве используются две модели ориентации. Модель 1 предназначена для учета изменения ориентации аппарата на шагах дискретизации измерений БДУС. Она является динамической, детерминированной и представлена в параметрах Родрига-Гамильтона:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
q(t0)=q0.
Здесь qi - кватернион ориентации аппарата; qωi - кватернион угловых скоростей; i - номер дискретного момента времени; Δt - шаг дискретизации измерений; q0 - кватернион ориентации для начального момента времени.
Кватернион q определяет ориентацию связанной системы координат аппарата относительно инерциальной системы координат, роль которой играет нормальная система координат. Вышеприведенные соотношения представляют собой пошаговую последовательность выполнения ориентации БИНС.
Модель 2 предназначена для коррекции модели 1. Вектор состояния модели 2 учитывает три компоненты - крен, тангаж и скорость аппарата относительно земли. Ее вектор состояния подлежит оцениванию по текущим значениям сигналов акселерометров. Модель 2 является стохастической и статической, поскольку ее состояние учитывается для текущего момента дискретного времени ti. Соотношения для модели 2 имеют вид
xi=xiq+wi,  ,
,
 .
.
Здесь xi - вектор состояния, а  - его априорное нормальное распределение; V - земная скорость; wi - вектор возмущений; xiq - вспомогательный вектор, рассчитываемый по кватерниону ориентации модели 1 с помощью матрицы А поворота связанной системы координат относительно инерциальной
- его априорное нормальное распределение; V - земная скорость; wi - вектор возмущений; xiq - вспомогательный вектор, рассчитываемый по кватерниону ориентации модели 1 с помощью матрицы А поворота связанной системы координат относительно инерциальной
A[3×3]=[aij]
ϑ=arcsin(a(1,2)), γ=-acrtg(a(3,2)/a(2,2)).
Обозначим  - априорное нормальное распределение вектора состояния модели 2 для момента времени ti;
- априорное нормальное распределение вектора состояния модели 2 для момента времени ti;  - апостериорное распределение, подлежащее оцениванию;
- апостериорное распределение, подлежащее оцениванию;  - априорное распределение для следующего момента времени ti+1. Тогда работа адаптивной гировертикали, выполняемая на одном интервале дискретизации измерений Δt, представляется в виде последовательности следующих шагов.
- априорное распределение для следующего момента времени ti+1. Тогда работа адаптивной гировертикали, выполняемая на одном интервале дискретизации измерений Δt, представляется в виде последовательности следующих шагов.
Шаг 1. Определение статистик апостериорной плотности  вектора состояния модели 2 с учетом
вектора состояния модели 2 с учетом  и текущих измерений гироскопов и акселерометров.
и текущих измерений гироскопов и акселерометров.
Шаг 2. Расчет оценки кватерниона ориентации  .
.
Шаг 3. Вычисление априорного кватерниона ориентации  для следующего момента дискретного времени.
для следующего момента дискретного времени.
Шаг 4. Вычисление статистик априорной плотности 
Остановимся на особенностях выполнения вычислений на шаге 1 и шаге 4.
1. Определение статистик апостериорной плотности  имеет вид известных соотношений байесовского оценивания вектора состояния по вектору его дискретных измерений.
имеет вид известных соотношений байесовского оценивания вектора состояния по вектору его дискретных измерений.
 ,
,
 ,
,
 ,
,
 .
.
Здесь  - оценка вектора наблюдений, которая имеет вид
- оценка вектора наблюдений, которая имеет вид
 .
.
4. Вычисление статистик априорной плотности  включает в себя расчет априорного математического ожидания и ковариационной матрицы. Априорное математическое ожидание компоненты скорости определяется с учетом допущения о постоянстве скорости и принимается равным ее оценке:
включает в себя расчет априорного математического ожидания и ковариационной матрицы. Априорное математическое ожидание компоненты скорости определяется с учетом допущения о постоянстве скорости и принимается равным ее оценке:  . Априорные математические ожидания углов тангажа и крена
. Априорные математические ожидания углов тангажа и крена  ,
,  вычисляются по кватерниону
вычисляются по кватерниону  . Априорная ковариационная матрица приближенно принимается равной апостериорной ковариационной матрице:
. Априорная ковариационная матрица приближенно принимается равной апостериорной ковариационной матрице:  . Применение более сложных соотношений для ее расчета представляется неоправданным в силу неточности модели 2. Указанные вычисления выполняются на каждом шаге Δt по мере поступления новых измерений гироскопов и акселерометров. Описание работы адаптивной гировертикали приведено в работах [2, 3].
. Применение более сложных соотношений для ее расчета представляется неоправданным в силу неточности модели 2. Указанные вычисления выполняются на каждом шаге Δt по мере поступления новых измерений гироскопов и акселерометров. Описание работы адаптивной гировертикали приведено в работах [2, 3].
Блок 6 определения и списания магнитной девиации работает следующим образом. После набора высоты совершают полный круг над аэродромом или в заданной зоне, где отсутствуют магнитные аномалии, в процессе которого запоминаются значения измеренного магнитного курса при помощи трехкомпонентного магнитометрического датчика (ТМД).
Как показывают расчеты, модель содержит шесть параметров Пуассона, которые устойчиво определяются по ограниченному объему полетных данных.
Используя упрощенную модель и приведенные ниже уравнения, определяют коэффициенты магнитной девиации ТМД.

где
 ,
,  ,
,  ,
,  ,
,  ,
,
Коэффициенты p, q, r учитывают влияние магнитного поля твердого в магнитном отношении железа. Коэффициенты a, b, d, e учитывают влияние магнитного поля мягкого в магнитном отношении железа ЛА. Допущение о равенстве коэффициентов b и d является пренебрежением влияния индуктивного магнитного поля ЛА на постоянное смещение оценки магнитного курса.
С учетом направления связанных осей ЛА начальные матрица Н и вектор Р принимают вид:
 ,
,  .
.
Далее рассчитывают:
- Оценку модуля магнитного поля земли (МПЗ)  , усредненную на всем отрезке наблюдения из N отсчетов:
, усредненную на всем отрезке наблюдения из N отсчетов:
 - полную совокупность измерений магнитометра;
- полную совокупность измерений магнитометра;
 ,
,
 - совокупность оценок измерений магнитометра с учетом компенсации девиации;
- совокупность оценок измерений магнитометра с учетом компенсации девиации;
 ,
,
 ,
,  - совокупность оценок модуля МПЗ с учетом компенсации девиации;
- совокупность оценок модуля МПЗ с учетом компенсации девиации;
 - оценку модуля МПЗ, усредненную по всему отрезку наблюдения;
- оценку модуля МПЗ, усредненную по всему отрезку наблюдения;
 ,
,
- Оценку средних значений модуля МПЗ  ,
,  на j частных интервалах:
на j частных интервалах:
 - совокупность оценок модуля МПЗ, усредненных на частных интервалах наблюдения;
- совокупность оценок модуля МПЗ, усредненных на частных интервалах наблюдения;
 ,
,  .
.
- Запоминают вектор частных оценок модуля МПЗ:
 - вектор
- вектор  имеет размерность J.
имеет размерность J.
- Формируют вектор В разностей между оценкой модуля МПЗ, усредненной по всему отрезку наблюдения, и оценками, усредненными на частных интервалах:
1.  ,
,  ,
,
2.  .
.
- Вычисляют функции чувствительности измерений модуля МПЗ к вариациям искомых коэффициентов.
Вычисление приращений оценок коэффициентов осуществляется путем формирования системы линейных алгебраических уравнений.
Аα=В,
где А - матрица функций чувствительности размерностью [J×6]
В=[φp φr φq φа φe φbd],
В - вектор размерностью J,
αT=[Δp Δr Δq Δа Δе Δb],
α - вектор приращений.
Вектор приращений определяется решением следующего выражения:
 .
.
При правильном решении приращения Δp Δr Δq Δа Δe Δb по мере выполнения итераций стремятся к нулю. Итерационный процесс полагаем успешным, если на последней итерации выполняется условие:

Текущее значение магнитного курса ЛА вычисляется с помощью соотношений:
 ,
,
 .
.
Со способом списания девиации в полете можно ознакомиться в работе [1].
Круговую девиацию определяют следующим образом. Заметим, что модель (1) описывает все составляющие девиации, в том числе и круговую, которая неразличима с угловой ошибкой установки магнитометра в горизонтальной плоскости. В связи с этим при определении коэффициентов матрицы М модели (1) необходимо учитывать хотя бы одно измерение курса, которое наиболее просто выполнить перед взлетом ЛА.
Обозначим A=A0 - оценку приближенного коэффициента круговой девиации по измерению начального курса. Для нее имеют место соотношения
A0=ψmo-ψ0.
ψm0=-arctg(Tz0/Tx0),
 ,
,
 ,
,  .
.
Здесь ψm0 - оценка начального курса ψ0 по сигналам магнитометра, спроецированным на плоскость нормальной земной системы координат с учетом магнитного склонения и оценок М и Р, полученных при условии b=d; С0 - матрица поворота.
Поскольку оценивание A0 опирается на оценки М и Р, алгоритм идентификации надо решать повторно. Как показывают расчеты, достаточно двух решений.
Для этого используются известные соотношения Арчибальда Смита, связывающего коэффициенты модели (1) с коэффициентами девиации, как ошибки магнитного курса при горизонтальном положении магнитометра.

Здесь A', B', C', D', E' являются точными коэффициентами девиации δ(ψm). Заметим, что приближенные коэффициенты девиации в (1) соответствуют δ≈tgδ и определяются как А=А', В=В', С=С', D=D', Е=Е'.
При первом решении идентификации полагается А=А'=0. С учетом (2) это соответствует b=d и выполняется предварительная идентификация шести коэффициентов a, d, е, p, q, r.
При втором решении идентификации коэффициенты a, d, e, p, q, r уточняются при условии b=A0d(2+а+e), которое следует из (2) для А≠0.
В целом реализация предлагаемого метода определения девиации состоит из следующих этапов.
1. Измерение ⎥T0⎢ с помощью откалиброванного магнитометра и его последующая установка на ЛА.
2. Измерение и запоминание начального курса, крена, тангажа и сигналов магнитометра при неподвижном положении ЛА перед взлетом.
3. Выполнение полета по замкнутой в плане траектории, и накопление измерений магнитометра на участке маневра.
4. Вычисление начального приближения оценок коэффициентов a, b, d, e, p, q, r при условии b=d путем решения методом параметрической идентификации.
5. Определение оценки круговой девиации A0 с учетом измерений начального курса, крена, тангажа и известного магнитного склонения.
б.Вычисление результирующих оценок коэффициентов a, b, d, e, p, q, r при условии b=A0d(2+а+e).
Заметим, что измерение начального курса можно определить пеленгом на любой заданный ориентир.
Компенсация девиации с целью оценивания курса в процессе полета состоит в вычислении оценки текущего курса ЛА ψi по сигналам магнитометра mxi, myi, mzi по модели (1) с идентифицированными коэффициентами.
 ,
,
 ,
,
 ,
,  .
.
Здесь Ci - матрица поворота, учитывающая текущие значения крена, тангажа и магнитного склонения.
Блок 7 датчиков воздушных давлений состоит из датчика статического давления Pst и датчика динамического давления Pdin набегающего потока воздуха.
В блоке 8 определения воздушной скорости определяют барометрическую высоту и воздушную скорость ЛА:
Т=Т0-0,065h,
 ,
,
 ,
,
где:

Т0=273 K,
λ=0,065 K/м,
Hbaro, Vbaro - барометрическая высота и воздушная скорость,
Pst, Pdyn - статическое и динамическое давление,
T - температура воздуха на заданной высоте h.
В блоке 9 осуществляется дифференцирование и фильтрация сигналов воздушной скорости с целью выделения производной от воздушной скорости. Эти сигналы служат для оптимизации адаптации коэффициентов фильтра к турбулентности. Рассмотрим полные выражения для перегрузок, зависящих от параметров полета ЛА:
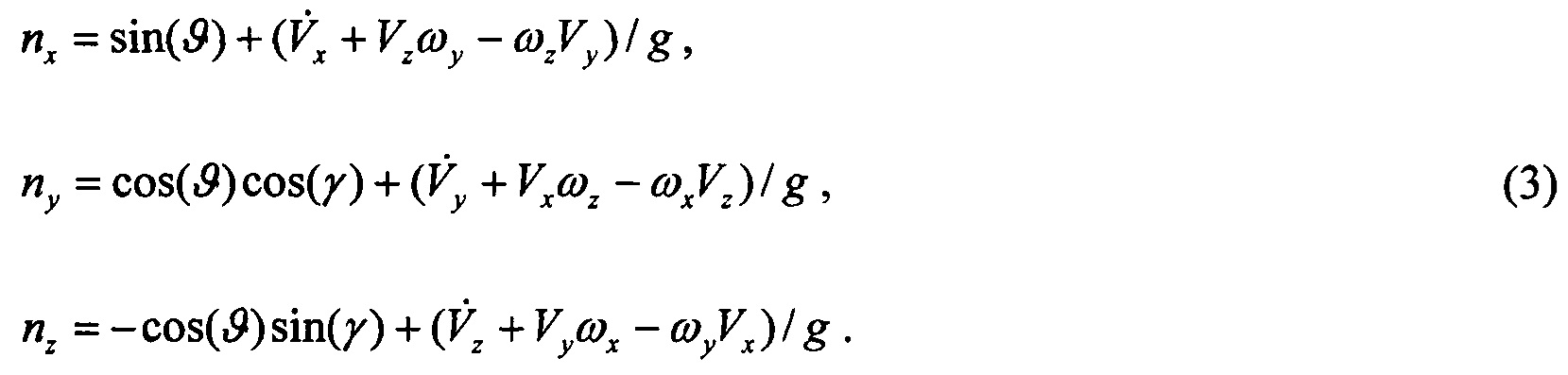
Степень влияния слагаемых в правых частях (3) зависит от режима полета.
На режиме прямолинейного горизонтального полета с постоянной скоростью имеет место  ,
,  ,
,  . Данные соотношения используются в простейших вариантах коррекции, когда ускорения, создаваемые ЛА, значительно меньше гравитационных.
. Данные соотношения используются в простейших вариантах коррекции, когда ускорения, создаваемые ЛА, значительно меньше гравитационных.
Слагаемые (Vzωy-ωzVy)/g, (Vxωz-ωxVz)/g, (Vyωx-ωyVx)/g обусловлены появлением кориолисовых сил и имеют значимость при разворотах ЛА.
Слагаемые  ,
,  ,
,  имеют значимость при появлении линейных ускорений по связанным осям ЛА.
имеют значимость при появлении линейных ускорений по связанным осям ЛА.
При относительно небольших углах атаки и скольжения скорость направлена в основном по строительной оси ЛА.
 .
.
Тогда (1) представляется в упрощенном виде

Всякое отклонение модуля перегрузки от единицы и всякая неточность (3) учитываются снижением доверия к наблюдениям перегрузок путем увеличения дисперсий в ковариационной матрице Ri, в соответствии с заданным законом. При этом снижается интенсивность коррекции, и, следовательно, снижаются ее ошибки.
На режимах разгона и торможения значительный вклад в изменение кажущегося ускорения вносит производная скорости.
Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот

 ,
,  .
.
Здесь Т - постоянная времени фильтра нижних частот.
Из выражений (4) следует, что оценивание скорости ЛА происходит при выполнении разворотов, когда присутствуют одна или обе угловые скорости ωz, ωy. При этом слагаемые ωxV/g, -ωyV/g в выражениях для ny, nz обеспечивают оценивание крена. Из первого уравнения в (1) следует, что слагаемое  в выражении для
в выражении для  влияет на оценивание тангажа.
влияет на оценивание тангажа.
На участках полета при взлете и посадке, когда скорость изменяется наиболее интенсивно, а ЛА не выполняет разворотов, скорость не оценивается, но при этом учитывают  для повышения точности оценивания тангажа.
для повышения точности оценивания тангажа.
Выделение производной  выполняется аналогично (5) с помощью фильтра нижних частот в дифференцирующем устройстве:
выполняется аналогично (5) с помощью фильтра нижних частот в дифференцирующем устройстве:

Заметим, что при этом постоянные рассогласования между земной и истинной воздушной скорости не вносят ошибок в определение производной. Динамические ошибки измерения VTA на малых высотах взлета и посадки незначительны. Шумовые погрешности сглаживаются фильтром. Поэтому с достаточной точностью правомерно полагать  .
.
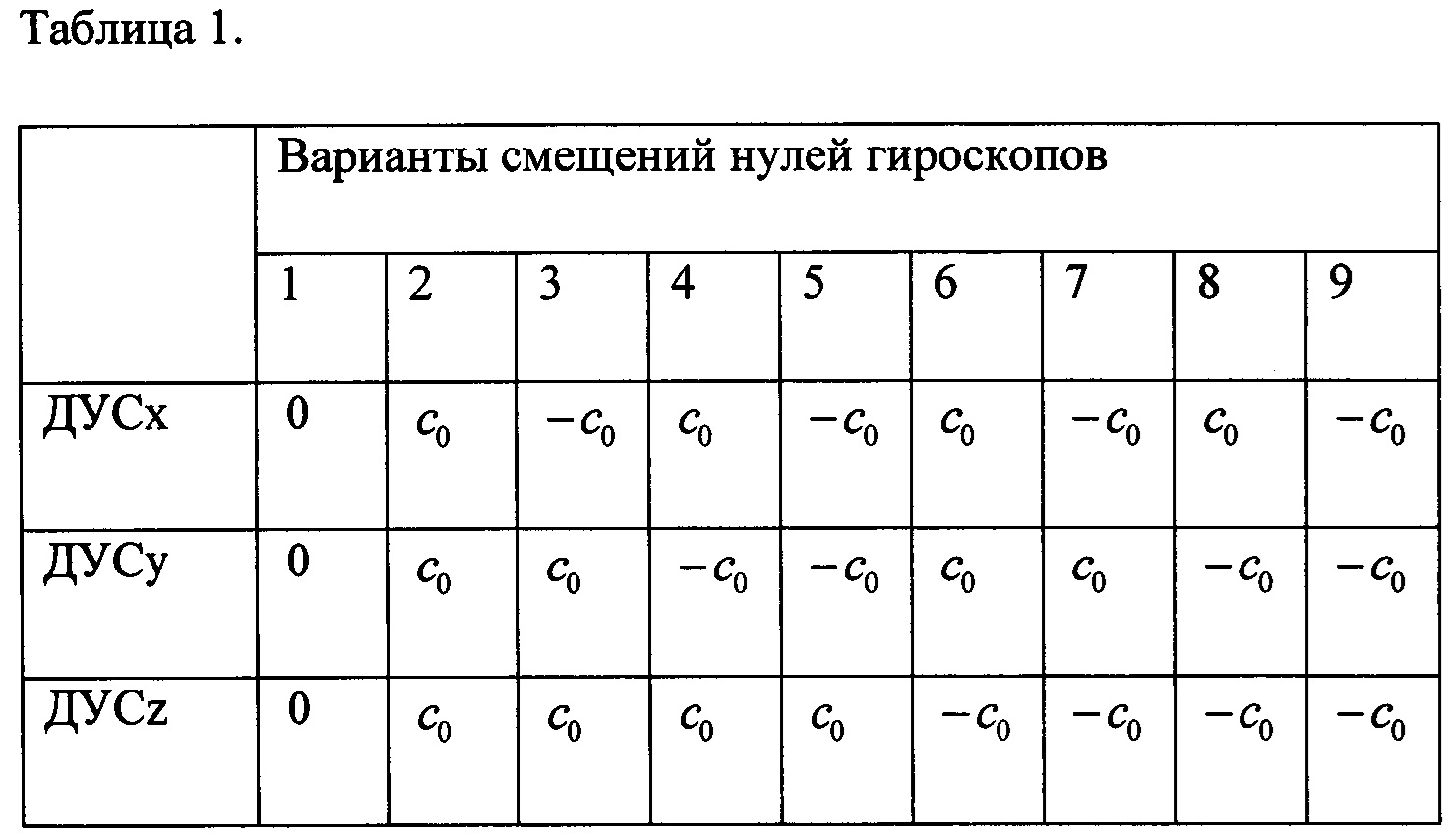
Дополнительную оптимизацию коэффициентов фильтра осуществляют по сигналам блока 10 оптимизации коэффициентов фильтра, с учетом уровня погрешностей датчиков. С учетом того, что основной вклад в ошибки ориентации адаптивной гировертикали вносят смещения нулей БДУС, настройку коэффициентов фильтра выполняют на множестве обучающих последовательностей, формируемых для набора сочетаний знаков смещений. Для каждого полета формируется девять обучающих последовательностей. Варианты знаков смещений нулей гироскопов представлены в таблице 1, где c0 - абсолютная величина смещения. Величина с0 задается с учетом класса точности применяемых ДУС.
Всего в алгоритме БРН присутствует шесть коэффициентов, подлежащих настройке: q1, q2, q3 - диагональные элементы ковариационной матрицы возмущений Q, а=d1,  ,
,  - коэффициенты нелинейной функции
- коэффициенты нелинейной функции  , определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
, определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
Критерием качества J1 назначают взвешенную среднеквадратическую ошибку ориентации по крену и тангажу, усредненную по времени и по множеству всех девяти обучающих последовательностей.

Здесь  - среднеквадратическая ошибка оценивания тангажа;
- среднеквадратическая ошибка оценивания тангажа;  - среднеквадратическая ошибка оценивания крена; αϑ=0.5 и αγ=0.5 - весовые коэффициенты; J={a, b, k, q1, q2, q3} - множество из шести искомых коэффициентов алгоритма.
- среднеквадратическая ошибка оценивания крена; αϑ=0.5 и αγ=0.5 - весовые коэффициенты; J={a, b, k, q1, q2, q3} - множество из шести искомых коэффициентов алгоритма.
Идентификацию турбулентности, в смысле выявления ее наличия, выполняют по величине среднеквадратичного отклонения  на скользящем интервале небольшой длины, порядка 1-2 секунд. При превышении некоторого заданного порога
на скользящем интервале небольшой длины, порядка 1-2 секунд. При превышении некоторого заданного порога  принимают решение о наличии турбулентности.
принимают решение о наличии турбулентности.
Оптимизации коэффициентов фильтра осуществляют в три этапа.
1. Численная минимизация критерия качества min J1 и определение коэффициентов {a1, b1, k1, q11, q21, q3l} для полетов в спокойной атмосфере,  .
.
2. Численная минимизация критерия качества min J1 и определение коэффициентов {а2, b2, k2, q12, q22, q32} для полетов в условиях турбулентности,  .
.
3. Определение процедуры вычисления дисперсий d, q1, q2, q3, удовлетворяющей с достаточной точностью полетам, как в спокойной атмосфере, так и в турбулентности.
Наиболее просто данная процедура реализуется с помощью линейной интерполяции коэффициентов фильтра по результатам этапов 1, 2, и текущим значениям  ,
,  .
.
Малогабаритная адаптивная курсовертикаль может быть использована как на высокоманевренных, так и на маломаневренных ЛА. Повышение точности определения истинного курса достигнуто путем списания девиации в полете и постоянной адаптивной коррекцией углов крена и тангажа по сигналам акселерометров, а также оптимизацией коэффициентов фильтрации в зависимости от турбулентности и осуществляющая настройку на множестве обучающих последовательностей. Заметим, что списание девиации ТМД может быть осуществлено периодически, в случае отсутствия замены бортового и подвесного оборудования ЛА. За счет подавления влияния кажущегося ускорения, зависимость маятниковой коррекции от вида движения объекта ослабляется до уровня, позволяющего использовать датчики угловой скорости и линейного ускорения средней и низкой точности, в том числе микромеханического типа.
Предложенное техническое устройство может быть реализовано путем использования базовых элементов для вычислительных систем бортовых цифровых вычислительных машин и базовых элементов, используемых на существующих навигационных комплексах летательных аппаратов.
Литература
1. Патент №2550774, Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления, МПК G01C 21/08. Бюллетень №13, 2015 г. Авторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
2. Патент №2564380, Способ коррекции бесплатформенной инерциальной навигационной системы, МПК G01C 21/06. Бюллетень. №27, 2015 г. Авторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
3. Патент №2564379, Бесплатформенная инерциальная курсовертикаль, МПК G01C 21/16, Бюллетень №27, 2015 г. Авторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А.
Малогабаритная адаптивная курсовертикаль, содержащая трехкомпонентный блок датчиков угловых скоростей (БДУС), трехкомпонентный блок датчиков линейных ускорений (БДЛУ), соединенные с первым и вторым входами адаптивной гировертикали, к выходу которой подключен вычислительный блок, и трехкомпонентный магнитометрический датчик, отличающаяся тем, что в нее дополнительно введены блок определения и списания магнитной девиации, последовательно соединенные блок датчиков воздушных давлений, блок определения воздушной скорости, дифференцирующий и фильтрующий блок и соединенные, в свою очередь, с третьим входом адаптивной гировертикали, блок оптимизации коэффициентов фильтра, соединенный с четвертым входом адаптивной гировертикали и подключенный к первому выходу вычислительного блока, ко второму входу вычислительного блока последовательно подключены блок трехкомпонентного магнитометрического датчика и блок определения и списания магнитной девиации, второй выход вычислительного блока является выходом малогабаритной адаптивной курсовертикали.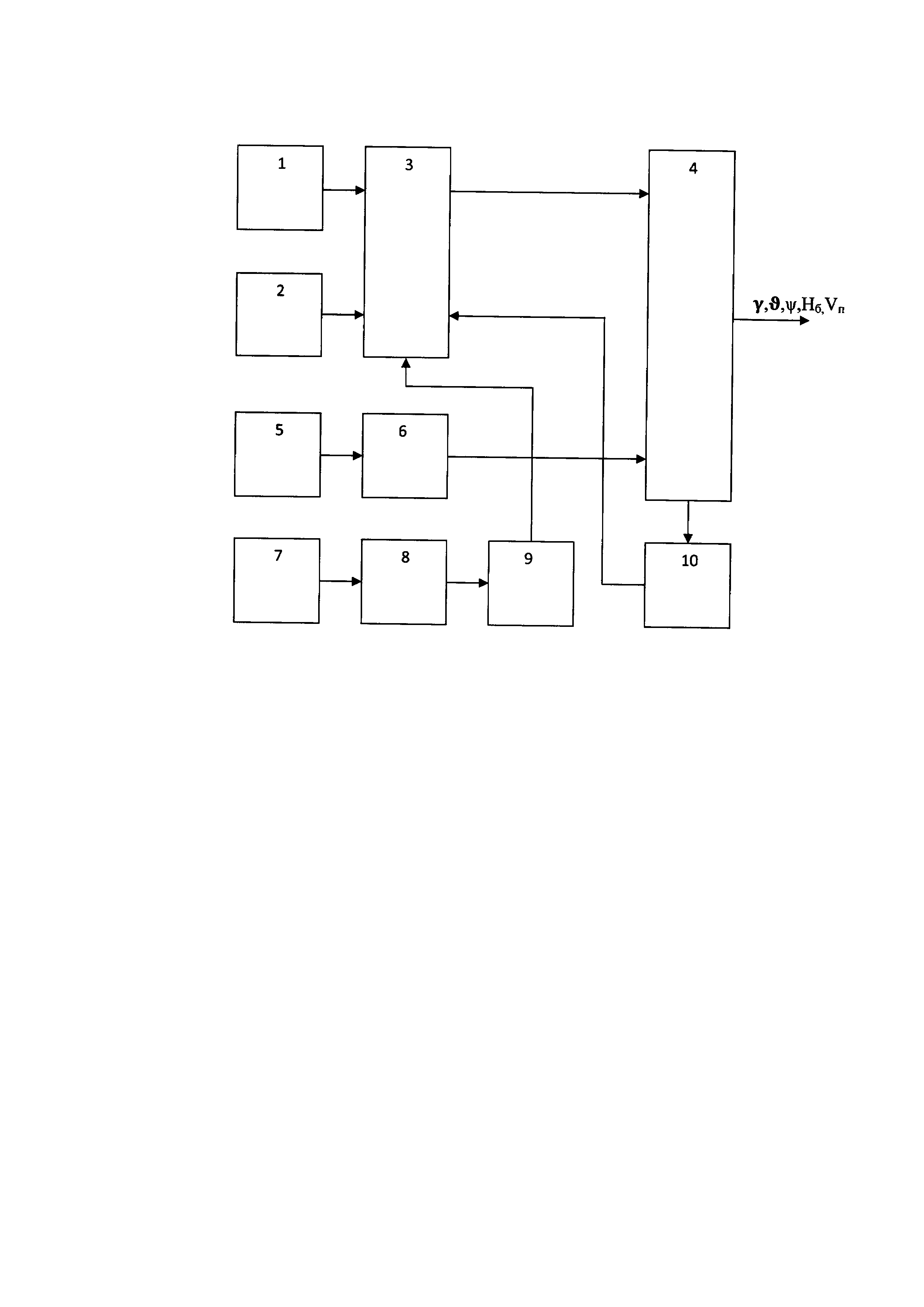
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления

