Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ ПАРАМЕТРОМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к системам управления регулируемым параметром устройства, являющегося авиационным оборудованием, и предпочтительно применяется к силовой установке летательного аппарата. Процесс эксплуатации устройства, установленного на летательном аппарате, такого как двигатель, является очень сложным и включает в себя множество параметров, и существующие ограничения, относящиеся к обеспечению безопасности, характерные для эксплуатации летательных аппаратов, требуют точного и надежного управления. Изобретение относится предпочтительно к турбовинтовым двигателям, а более конкретно, к определению команды для сервоуправления мощностью такого турбовинтового двигателя и для сервоуправления скоростью вращения воздушного винта.
Уровень техники
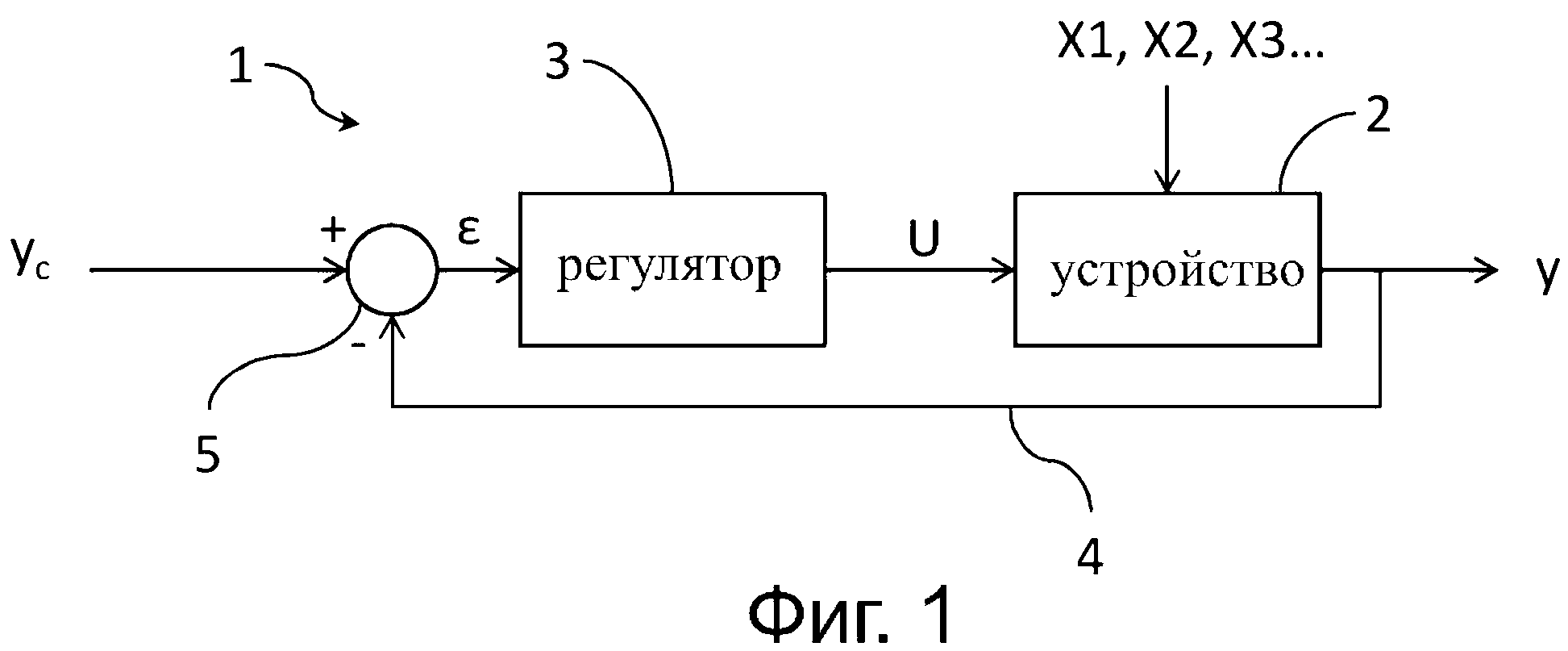
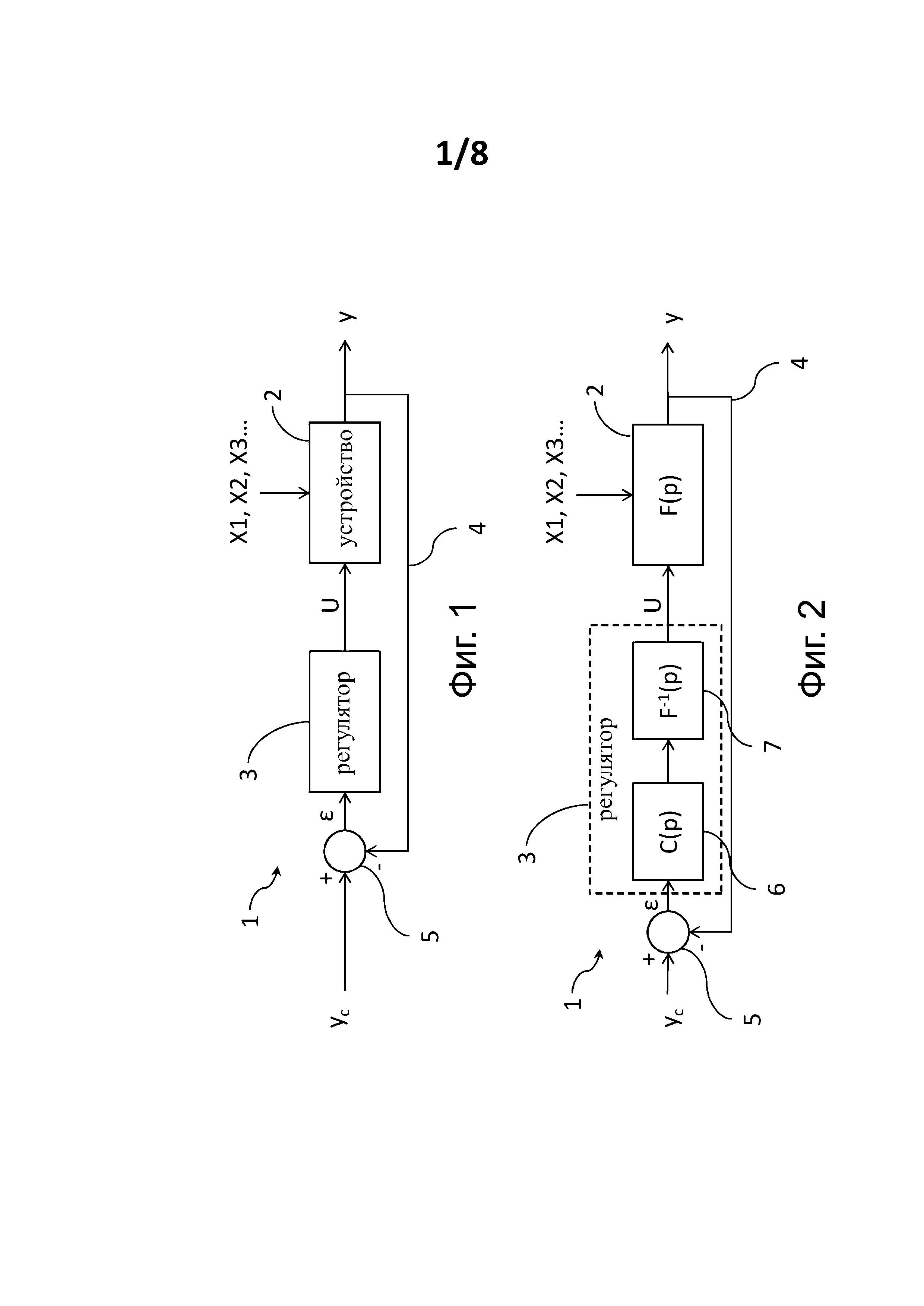
В общем виде на фиг.1 показана система 1 управления с регулированием посредством сервоуправления при заданном значении Yc регулируемого параметра Y физического устройства 2. Это управление направлено на поддержание по меньшей мере одной физической величины, называемой регулируемым параметром, при целевом значении, называемом заданным значением, посредством воздействия на регулируемую переменную командой U. Система 1 содержит регулятор 3, подающий упомянутую команду U, на вход регулятора поступает выходной сигнал ε дифференциатора 5, обеспечивающего разностную величину между закольцовыванием 4 регулируемого параметра Y и заданным значением Yc.
В настоящее время данную систему используют в процессе автоматизации для сервоуправления регулируемым параметром Y при заданном значении Yc. Сложность заключается в определении передаточной функции регулятора 3. Фактически, именно эта передаточная функция определяет логику работы устройства 2 посредством команды U. Для простых устройств легко определить форму передаточной функции регулятора 3 для получения реакции устройства 2, которая удовлетворяет требованиям по скорости реакции и надежности. Но поскольку конструкция устройства становится сложной, разработка приемлемого регулятора 3 становится сложным процессом или даже невозможным.
Специально для устройств 2, выходной сигнал которого, т.е. регулируемый параметр Y, зависит от многих переменных параметров, помимо от команды U, называемых входными параметрами, уже не применяются обычные способы определения передаточной функции регулятора 3. Это справедливо, в частности, когда соотношение между командой U, входными параметрами и регулируемым параметром Y предполагает наличие нелинейностей.
Сущность изобретения
Задачей настоящего изобретения является решение технической задачи предшествующего уровня техники путем предложения системы управления регулируемым параметром устройства, являющегося авиационным оборудованием, причем указанный регулируемый параметр определяется законом функционирования, связывающим указанный регулируемый параметр с командой и с множеством входных параметров, причем указанная система управления регулированием содержит контур регулирования, который выполняет сервоуправление указанным регулируемым параметром при заданном значении посредством команды, управляющей указанным устройством, при этом система содержит модуль компенсации закона функционирования и модуль определения локального коэффициента усиления, выполненный с возможностью определять величину локального коэффициента усиления статической части модели закона функционирования, представляющего коэффициент усиления указанного регулируемого параметра в ответ на изменение указанной команды в стабильном рабочем режиме указанного закона функционирования, при этом указанная статическая часть модели закона функционирования объединяет независимые от времени соотношения между регулируемым параметром, командой и множеством входных параметров, указанная модель закона функционирования также содержит динамическую часть, объединяющую зависящие от времени соотношения между регулируемым параметром, командой и множеством входных параметров, при этом указанный модуль компенсации закона функционирования использует инверсию указанного локального коэффициента усиления.
Таким образом, применение модулем компенсации закона функционирования инверсии локального коэффициента усиления компенсирует закон функционирования даже в случае нелинейности в законе функционирования. Регулируемый параметр может быть сервоуправляемым при устранения этих нелинейностей.
Систему предпочтительно дополняют следующими признаками, взятыми отдельно или в любой из их технически возможных комбинаций:
- локальный коэффициент усиления рассчитывают из значений, принимаемых выходами статической части модели закона функционирования по меньшей мере для двух отдельных значений команды U при постоянстве входных параметров;
- разностная величина между двумя отдельными значениями команды составляет менее 0,25% диапазона изменения указанной команды и/или разностная величина между двумя отдельными значениями команды соответствует изменению указанной команды, вызывающему изменение величины регулируемого параметра менее 1% от диапазона изменения указанного регулируемого параметра;
- модуль определения величины локального коэффициента усиления выполнен с возможностью выдавать заданное значение насыщения, когда локальный коэффициент усиления, вычисленный указанным модулем определения, ниже предварительно определенного значения;
- модуль определения локального коэффициента усиления выполнен таким образом, что, по меньшей мере, при каждом изменением команды и/или входных параметров определяют новый локальный коэффициент усиления, чтобы отражать упомянутые изменения;
- контур регулирования содержит регулятор, образованный последовательным соединением корректора и указанного модуля компенсации закона функционирования, при этом указанная команда соответствует выходу регулятора;
- модуль компенсации закона функционирования также содержит первую передаточную функцию, обратную динамической части модели закона функционирования;
- модель закона функционирования содержит обратимую часть и необратимую часть, и модуль компенсации закона функционирования содержит статическую компенсацию, которая соответствует инверсии локального коэффициента К усиления, и динамическую компенсацию, содержащую канал прямой связи и канал обратной связи, представляющий собой контур обратной связи, в котором канал прямой связи содержит вторую передаточную функцию, включающую в себя инверсию обратимой части модели закона функционирования, а канал обратной связи содержит третью передаточную функцию, включающую в себя необратимую часть модели закона функционирования.
Изобретение также относится к узлу, содержащему устройство, являющееся авиационным оборудованием, и систему управления указанным устройством согласно изобретению.
Краткое описание чертежей
Изобретение будет более понятным из нижеследующего описания, которое относится к предпочтительному варианту осуществления, приведенному в качестве неограничивающего примера и объясненному со ссылкой на прилагаемые схематические чертежи, на которых:
- фиг.1, которая уже ранее описана, иллюстрирует систему управления регулированием посредством сервоуправления при заданном значении регулируемого параметра физического устройства;
- фиг. 2, 3 и фиг.4 иллюстрируют систему управления регулированием посредством сервоуправления при заданном значении регулируемого параметра физического устройства согласно возможным вариантам осуществления изобретения;
- фиг. 5-9 иллюстрируют примерный вариант осуществления изобретения.
На разных чертежах идентичные ссылочные позиции обозначают одинаковые или эквивалентные элементы.
Подробное описание
В настоящем описании модуль означает набор реализуемых технических средств для выполнения функции модуля. Как правило, уравнения и вычисления функции связаны между собой и могут быть объединены. Настоящее изобретение выполняется компьютером и его компонентами (память, устройства ввода/вывода), которые составляют конструктивную часть системы управления регулированием. Кроме того, в той мере, в какой модель характеризуется набором уравнений, для обозначения модели термины «передаточная функция» и «модель» могут использоваться взаимозаменяемо, хотя термин «модель» подразумевает необходимость рассмотрения закона функционирования физической системы, моделируемой указанной моделью.
На фиг.2 показан принцип работы системы 1 по изобретению. Как и на фиг.1, показана система 1 управления регулированием посредством сервоуправления при заданном значении Yc регулируемого параметра Y физического устройства 2.
Система 1 содержит контур регулирования, который выполняет сервоуправление регулируемым параметром Y при заданном значении Yc путем управления устройством 2 посредством команды U. Этот контур регулирования содержит регулятор 3, поставляющий команду U и подающий на вход выходной сигнал дифференциатора 5, поставляющий разностную величину между контуром 4 обратной связи регулируемого параметра Y и заданным значением Yc.
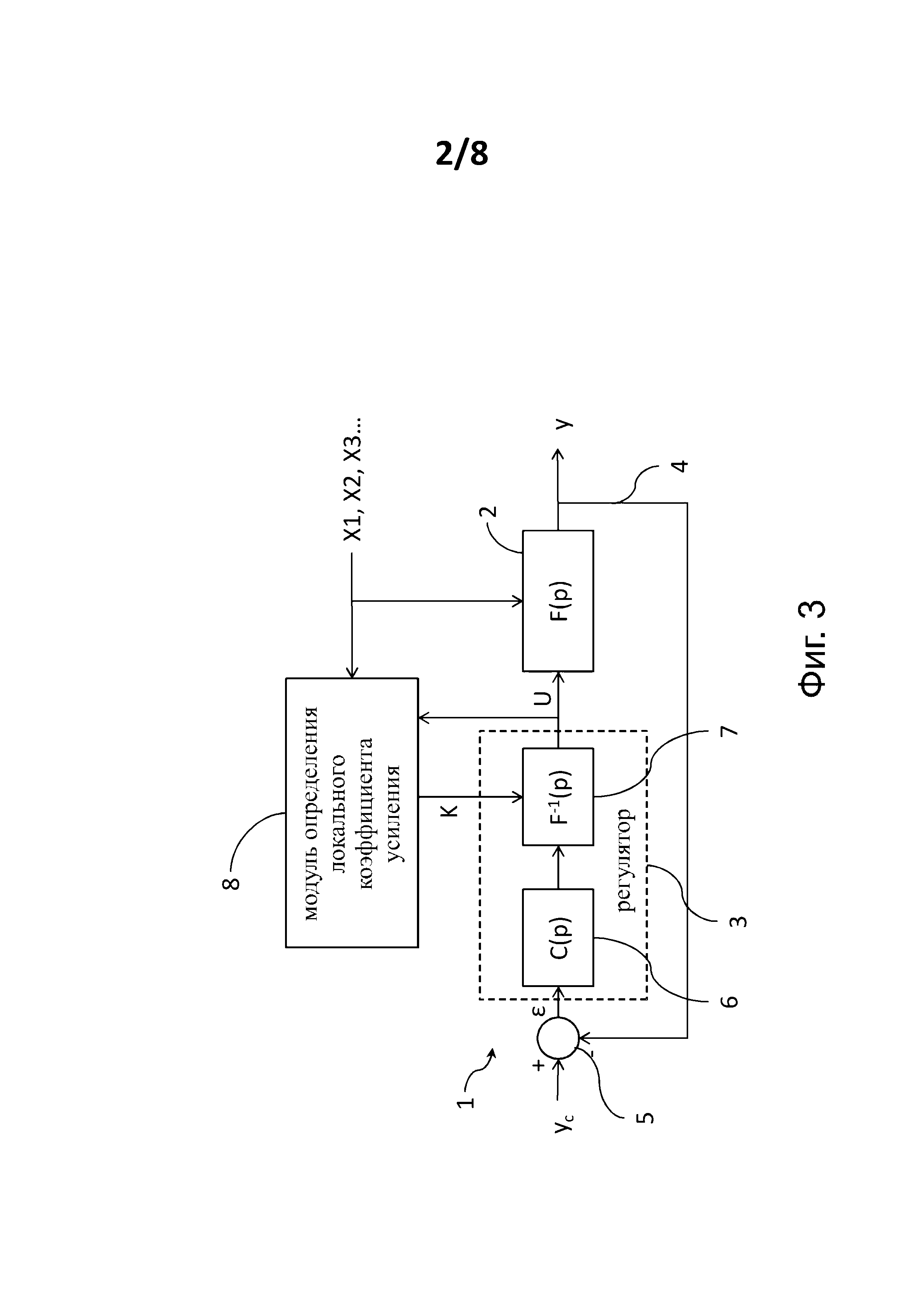
Регулируемый параметр Y регулируется законом функционирования, связывающим указанный регулируемый параметр Y с командой U и с множеством входных параметров X1, X2, X3 .... Этот закон функционирования может быть смоделирован передаточной функцией F(p), математической моделью соотношения между командой U, входными параметрами Xi и регулируемым параметром Y.
Регулятор 3 содержит два последовательно соединенных модуля: корректор 6 с передаточной функцией C(p) и модуль 7 компенсации закона функционирования с передаточной функцией F-1(р). Как представлено, корректор 6 и модуль 7 компенсации предпочтительно расположены последовательно по каналу прямой связи контура регулирования, причем корректор 6 находится выше по потоку от модуля 7 компенсации. Тем не менее, возможны другие конфигурации. Команда U соответствует выходному сигналу регулятора 3 и, следовательно, выходному сигналу корректора 6 или модуля 7 компенсации.
Передаточная функция F-1(p) модуля 7 компенсации является инверсией передаточной функции F(p), моделирующей устройство 2 и, следовательно, соответствует инверсии модели закона функционирования. Из-за этого, поскольку F-1(p) ⋅ F(p)=1, модуль компенсации эффективно компенсирует закон функционирования. Речь идет о коррекции посредством инверсной модели. Он предназначен для использования в канале коррекции онлайн-инверсии модели закона функционирования устройства 2, чтобы компенсировать полюсы и нули процесса, а также статическое усиление. Инверсия модели закона функционирования допускает полную теоретическую компенсацию, но зависит от моделирования основного признака закона функционирования. Благодаря этой компенсации корректор 6 может быть легко сформирован для достижения динамической и целевой точности.
Однако инверсия передаточной функции модели закона функционирования требует, чтобы передаточная функция была полностью обратима, или необратимые элементы были пренебрежимо малыми. В результате, некоторые физические процессы являются по существу необратимыми, и также моделирование может выявлять нелинейности для лучшего отражения реального процесса.
Фактически, на практике передаточная функция F(p), моделирующая закон функционирования, никогда не бывает явной. Инженер в области автоматизации часто использует модель физического уравнения типа f с зависимостью регулируемого параметра Y не только от команды U, но и от нескольких входных параметров Xi:
Y = f (U, X1, X2, Х3, ...)
при этом, Y - параметр, подлежащий регулированию, то есть является выходным сигналом, поставляемым моделью закона функционирования, U - команда и X1, X2, X3 ... являются входными параметрами, которые влияют на закон функционирования. Модель закона функционирования может определяться физическими соотношениями между различными известными переменными, то есть анализом и/или идентификацией. Передаточная функция F(p) определяется из этой модели, чтобы отразить ее работу.
В общем модель f закона функционирования состоит из двух частей: статической части и динамической части. Статическая часть модели закона функционирования объединяет независимые от времени соотношения между регулируемым параметром Y, командой U и множеством входных параметров Xi. Динамическая часть модели закона функционирования объединяет зависящие от времени соотношения между регулируемым параметром Y, командой U и множеством входных параметров Xi.
Модель закона функционирования может быть обозначена как:
Y = K (U, X1, X2, Х3, ...) · f’ (U, X1, X2, Х3, ...)
K (U, X1, X2, Х3, ...) представляет собой статическую часть, представляющую закон функционирования в установившемся режиме, т.е. когда команда U и множество входных параметров Xi постоянны в течение достаточного периода времени, чтобы эффекты неустановившегося режима были незначительными. Таким образом, в установившимся режиме:
Y = K (U, X1, X2, Х3, ...)
Элементы статической части определяют либо идентификацией в установившимся режиме, либо анализом.
f’ (U, X1, X2, Х3, ...) представляет собой динамическую часть, представляющую влияние на закон функционирования временных изменений команды U и/или множества входных параметров Xi. В установившимся режиме:
f’ (U, X1, X2, Х3, ...) = 1
Эта динамическая часть f'(p) может быть записана как передаточная функция унитарного статического усиления:
где a1, a2, b1, b2, c1, c2, ... - параметры функции входных данных U, X1, X2, X3 .... Элементы динамической части определяются либо идентификацией в неустоявшимся режиме, либо анализом.
Цель состоит в том, чтобы реверсировать передаточную функцию модели закона функционирования для получения F-1(p), так чтобы F(p) ⋅ F-1(p) = 1. Инверсия передаточной функции модели закона функционирования не создает проблем для динамической части:
Но статическую часть сложно реверсировать, когда функция K является комплексной, содержит нелинейности и/или существенно зависит от входных параметров Xi.
Решение состоит в вычислении локального коэффициента усиления статической части модели закона функционирования, представляющего коэффициент ΔY усиления регулируемого параметра Y в ответ на изменение ΔU команды U в установившемся рабочем режиме указанного закона функционирования:

Этот расчет выполняется модулем определения локального коэффициента усиления в ядре компьютера, который управляется регулируемым параметром Y. Модуль определения локального коэффициента усиления сконфигурирован так, что, по меньшей мере, при каждом изменении команды U и/или входных параметров Xi, определяется новый локальный коэффициент усиления для отражения указанных изменений. В частности, локальный коэффициент усиления рассчитывается в режиме реального времени на каждом временном этапе вычисления величины управления регулированием для обновления указанного локального коэффициента усиления.
Следует отметить, что использование лишь инверсии статической части обеспечивает единый статический коэффициент усиление для узла «устройство-регулятор», и компенсация динамической части не всегда необходима. Это имеет место, например, когда система имеет быструю и линейную динамику; в этом случае, посредством регулирования корректора 6 легко компенсируется эта динамика без необходимости реверсировать динамические характеристики системы.
На фиг. 3 показана компоновка этого модуля определения локального коэффициента 8 усиления в системе, подобной той, что показана на фиг. 2. Модуль определения локального коэффициента 8 усиления принимает на входе входные параметры Xi, то есть X1, X2, X3, и команду U и выдает локальный коэффициент усиления в модуль 7 компенсации регулятора 3.
Точнее, модуль определения локального коэффициента 8 усиления вычисляет локальный коэффициент усиления из значений, снятых с выходов статической части модели закона функционирования по меньшей мере для двух отдельных значений команды U при постоянстве входных параметров:

Два отдельных значения команды разделены (по значению) разностью ΔU. Эта разность ΔU выбирается достаточно малой, чтобы оставаться в линейной области статической части передаточной функции модели закона функционирования, то есть можно игнорировать любые нелинейности вокруг текущей рабочей точки системы.
Разность ΔU между двумя отдельными значениями команды U предпочтительно составляет менее 0,25% от диапазона изменений указанной команды U и/или разность ΔU между двумя отдельными значениями команды U соответствует изменению указанной команды U, вызывающему изменение ΔY регулируемого параметра Y менее чем на 1% диапазона изменения указанного регулируемого параметра Y. До тех пор пока она находится в линейной области статической части, изменение ΔY регулируемого параметра может быть аппроксимировано формулой:

Как только этот локальный коэффициент усиления определен модулем определения локального коэффициента 8 усиления, он используется модулем 7 компенсации закона функционирования. Точнее, модуль 7 использует инверсию локального коэффициента усиления. В продолжение, инверсию передаточной функции модели закона функционирования можно записать в виде:

или:

Поскольку передаточная функция модуля 7 компенсации получена для теоретической компенсации передаточной функции модели устройства 2, то
F-1(р) ⋅ F(р) = 1
Таким образом, передаточная функция C (p) корректора 6 может быть получена без учета нелинейностей закона функционирования устройства 2, обеспечивая, что передаточная функция замкнутого контура отвечает потребностям планового управления. Передаточная функция C (p) корректора 6 может быть выбрана, например, для того, чтобы допускать интеграцию в контуре регулирования и, таким образом, обеспечить исключение постоянной ошибки регулируемого параметра Y при заданном значении Yc ступенчатого типа. В этом случае, выбор коэффициента усиления в передаточной функции C (p) корректора 6 управляет реакцией замкнутого контура, чтобы удовлетворять требованиям по времени отклика, независимо от характеристики устройства, поскольку его закон функционирования компенсируется.
Некоторые передаточные функции модели закона функционирования могут иметь особенные признаки, которые необходимо учитывать. Это особенно характерно, когда устройство 2 имеет гистерезис. Это относится, например, к пневматическим клапанам.
В случае такого устройства 2, имеющего гистерезис при инверсии направления команды U, регулируемый параметр Y реагирует только после того, как команда прошла гистерезис. С точки зрения корректора 3, это соответствует локальному коэффициенту усилению, который стремится к 0, т.е. в интервале гистерезиса изменение команды U не приводит к изменению регулируемого параметра Y. Другими словами, в интервале гистерезиса, команда U не влияет на выход, т.е. на регулируемый параметр Y, если команда U не находится за пределами гистерезиса.
Следовательно,

Поэтому локальный коэффициент усиления равен нулю. Однако локальное усиление, которое изменяется на противоположное, чтобы компенсировать коэффициент усиления закона функционирования устройства 2, значение коэффициента усиления модуля компенсации стремится к бесконечности, что соответствует бесконечно большой команде U. Поэтому можно гарантировать, что модуль определения локального коэффициента усиления выполнен с возможностью выдавать заданное значения насыщения, когда локальный коэффициент усиления, вычисленный указанным модулем определения, ниже заданной величины по абсолютному значению.
Это значение насыщения предотвращает исключение программного уровня, которое приводило бы к делению на ноль во время инверсии локального коэффициента усиления. Далее, это значение насыщенности выбирается, как правило, очень малым, так что после его реверса он максимизирует команду, сгенерированную регулятором 3. Это генерирует быструю команду, которая позволяет пройти интервал гистерезиса за короткий период. Таким образом, эффективность управления улучшается, несмотря на наличие гистерезиса.
Другим особым признаком, который может быть учтен, является, например, наличие необратимой части в передаточной функции модели закона функционирования. Это, например, случай чистого запаздывания. Эта необратимая часть не может быть компенсирована, но ее включение в модуль 7 компенсации закона функционирования компенсирует обратимую часть модели закона функционирования.
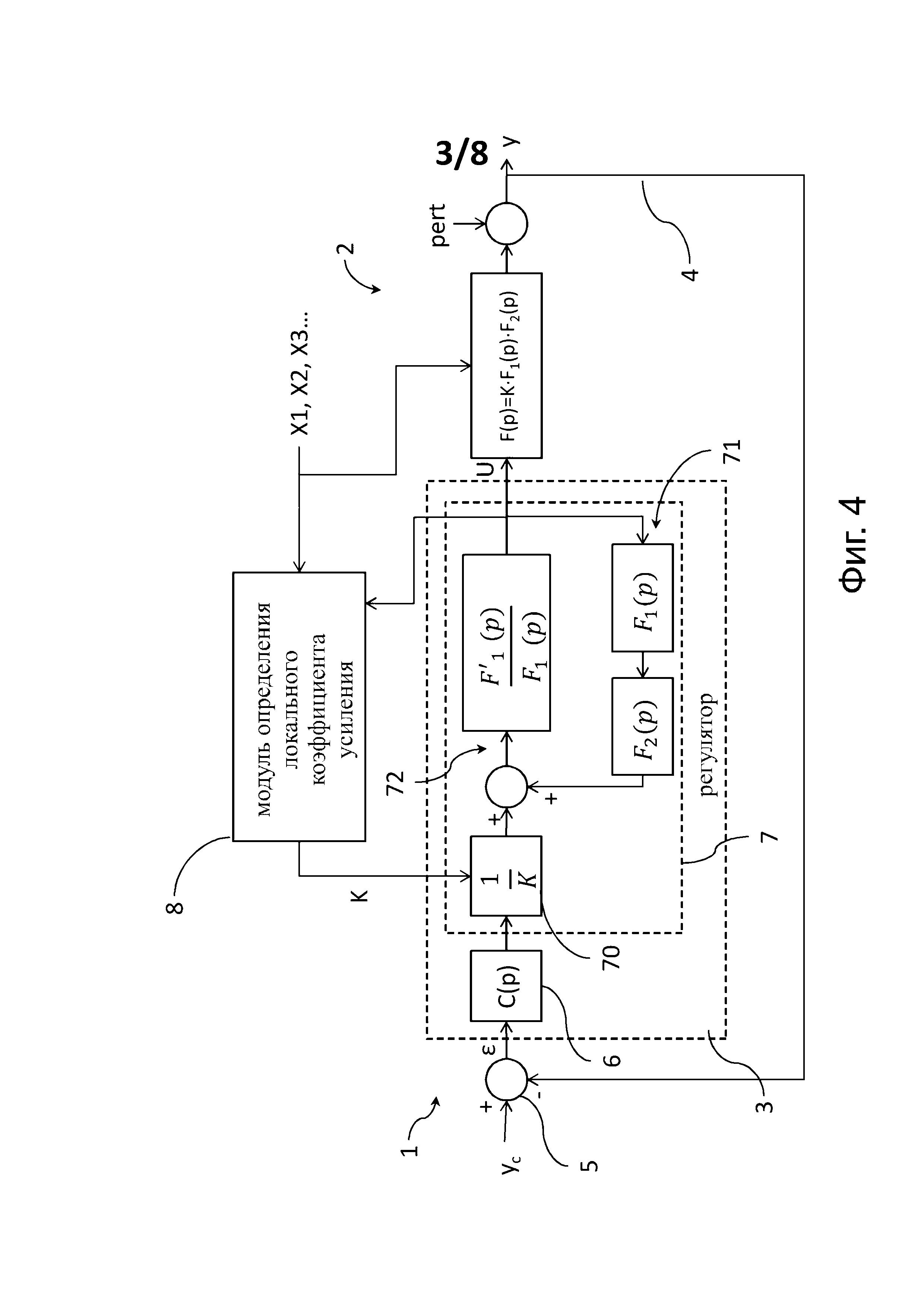
На фиг.4 проиллюстрирован пример включения этой необратимой части в модуль 7 компенсации. F1 (p) обозначена обратимая часть модели, F2 (p) необратимая часть и K статический коэффициент усиления, так что

В качестве иллюстрации, закон функционирования моделируется здесь этой передаточной функцией, добавленной к возмущениям «pert».
Модуль 7 компенсации закона функционирования содержит первую статическую компенсацию 70, которая соответствует инверсии локального коэффициента К усиления, затем динамическую компенсацию, ниже по потоку от статической компенсации 70, содержащую канал 72 прямой связи и канал 71 обратной связи, составляющий контур обратной связи. Канал 72 прямой связи содержит передаточную функцию с инверсией обратимой части модели закона функционирования. Этот реверс компенсирует обратимую часть модели закона функционирования. Передаточная функция канала 72 прямой связи также содержит передаточную функцию F'1 (p), соответствующую динамическим характеристикам, требуемым для передаточной функции в замкнутом контуре. Таким образом, передаточная функция канала 72 прямой связи соответствует:
Канал 71 обратной связи содержит передаточную функцию F2 (p), включающую в себя необратимую часть модели закона функционирования. Канал 71 обратной связи также содержит передаточную функцию F1 (p), соответствующую обратимой части модели закона функционирования. Таким образом, передаточная функция канала 71 обратной связи соответствует F2 (p) ⋅ F1 (p). Выходной сигнал этого канала 71 обратной связи суммируется на выходе статической компенсации 70 для формирования входного сигнала канала 72 прямой связи, выход которого представляет собой команду U и также является входным сигналом канала 71 обратной связи.
Изучение передаточной функции замкнутого контура (CLTF) этой системы управления регулированием показывает ее преимущества. Результат вычисления CLTF имеет следующий вид:

В первом случае F2 (p) = 1, т.е. F(p) полностью обратима, что соответствует случаям, указанным ранее. Следующая CLTF имеет вид:
Если выбрана C(p) = 1, то

Поэтому корректор 6 накладывает желаемую динамическую характеристику в целом без статической ошибки, и возмущения могут быть эффективно устранены путем выбора быстрой динамики для F'1 (p). Система представляет особый интерес, когда необратимая часть является в достаточной степени моделируемой. Это относится к чистому запаздыванию.
Если Tr обозначает задержку, то передаточная функция чистого запаздывания выражается как:

Если задержка известна, то она не влияет на стабильность CLTF. Однако устранение возмущения зависит от величины задержки. Однако в случае значительной задержки интересно выбрать корректор 6 так, чтобы повысить эффективность устранения.
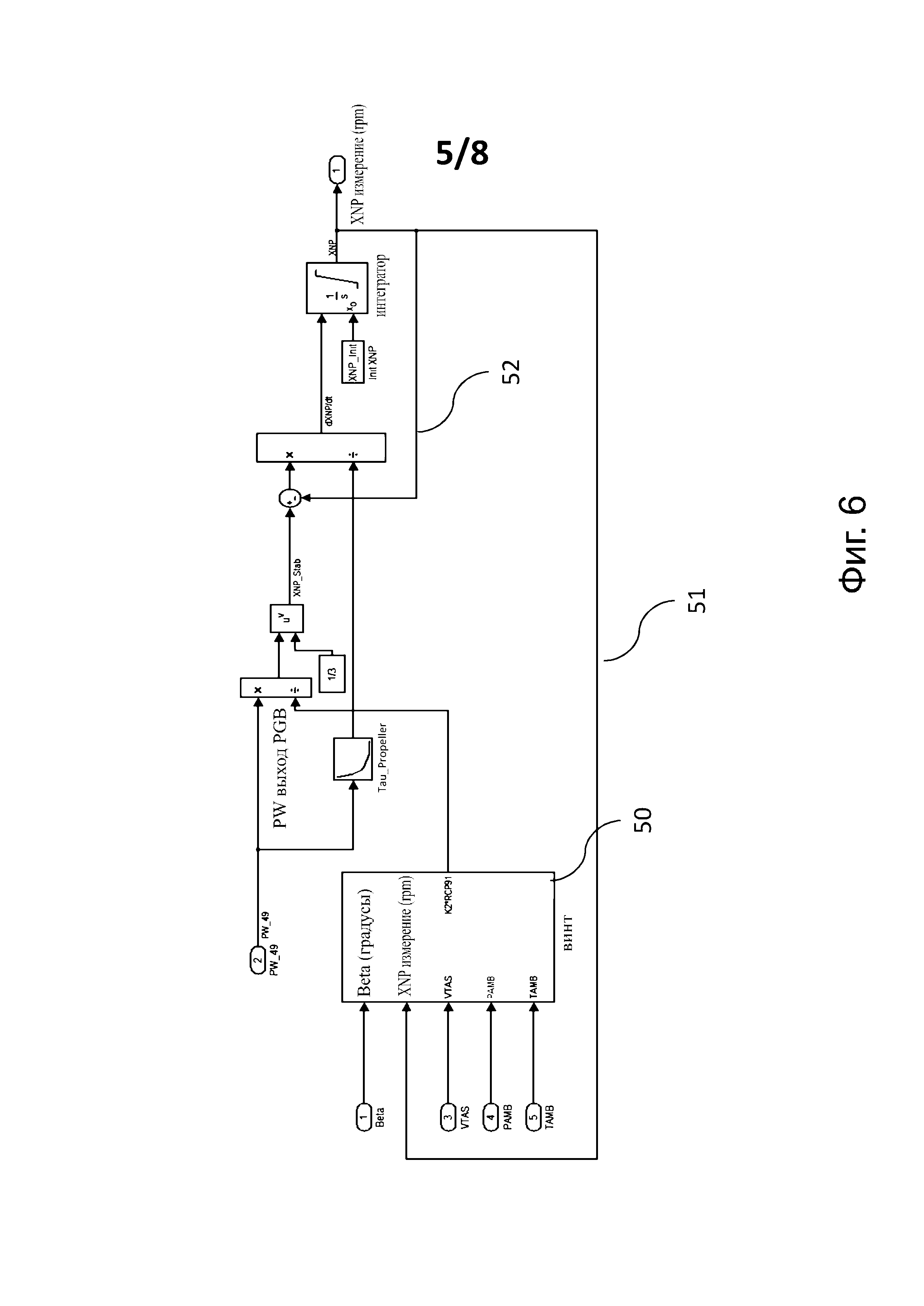
Следующий неограничивающий пример приведен в том случае, когда устройство представляет собой турбовинтовой двигатель, и регулируемым параметром является скорость вращения винта XNP, при этом команда представляет собой угол β установки лопасти шаг винта. Команда β обозначена как Beta на фиг.6-9. Пример иллюстрирует применение изобретения для вычисления F-1(p) со ссылкой на фиг.3, что соответствует возможному варианту осуществления изобретения.
В таблице 1 ниже перечислены различные элементы, используемые в модели закона функционирования.
Таблица 1
|










 , Момент инерции винта + мощность турбины + LP вал в сборе
, Момент инерции винта + мощность турбины + LP вал в сборе
 = коэффициент тяги
= коэффициент тяги = коэффициент скорости набегающего потока воздуха
= коэффициент скорости набегающего потока воздухаПрежде всего, устанавливают модель закона функционирования, связывающего β (или Бета) с XNP. Принимая упрощенное выражение силовой установки, связывающее XNP с разностью момента вращения турбины низкого давления (LP) и винта:
 ,
,
однако
 .
.
Следовательно,
Целью является описание условия по мощности:

Устанавливают, что
В результате
где Pwp (задано изготовителем винта), так что

K2 поддерживается постоянным:
где A91 является постоянным коэффициентом тяги

и RCP91 коэффициент мощности винта, определенный производителем:
 ,
,
где RJ91 является коэффициентом коэффициент скорости набегающего потока воздуха (см. таблицу 1).
Следовательно,
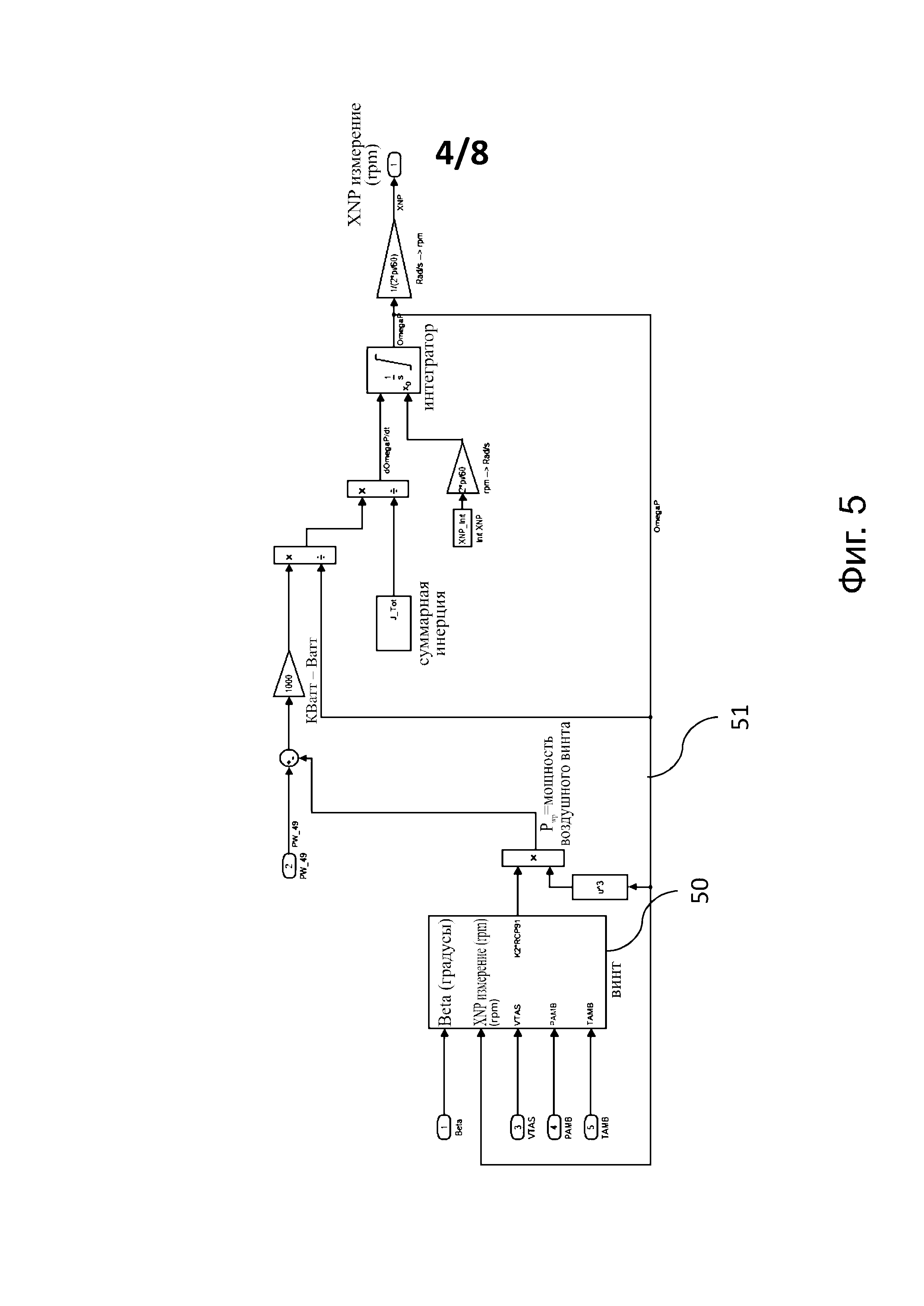
На фиг.5 показана модель эволюции скорости воздушного винта турбовинтового двигателя, в которой блок 50 соответствует вычислению произведения постоянной K2 на коэффициент RCP91 мощности воздушного винта. Этот результат умножают на величину ωp (OmegaP) угловой скорости вращения винта, предварительно рассчитанную и возведенную в третью степень. Закольцовывание 51 иллюстрирует включение угловой скорости вращения воздушного винта посредством блока 50 и кубической функции. Мощность, поглощаемая винтом, Pwp, получают как функцию от команды β измерения угловой скорости вращения воздушного винта, через закольцовывание 51, а также входных параметров, содержащих скорость перемещения летательного аппарата VTAS, давление воздуха PAMB и температуру окружающей среды TAMB. Мощность, поглощаемую винтом Pwp, вычитают из другого входного параметра, образованного мощностью, вырабатываемой силовой турбиной Pw49. Используемые конкретные единицы измерения для проиллюстрированного примера, должны быть преобразованы с использованием определенных величин. Таким образом, киловатты Pwp и Pw49 переводят в ватты. Результат делится на величину скорости ωP, затем на полную инерцию J_Tot. Этот результат затем интегрируют путем инициализации с начальной скоростью XNPInit, преобразованной ранее из rpm в rad/s. Результатом после интеграции является скорость XNP, преобразованная из rad/s в rpm.
Эта передаточная функция упрощена, чтобы выявить низкочастотную систему порядка 1, представляющую динамику воздушного винта, постоянная времени Tau_propeller является параметром, зависящим от входных сигналов и, поэтому, коэффициент усиления соответствует установившейся части в скорости вращения XNP_Stab:

На фиг.6 показана модифицированная передаточная функция. Относительно фиг.5 отсутствие учета скорости вращения воздушного винта отмечено на выходе из блока 50 через закольцовывание 51 и кубическую функцию. Вместо этого, произведение постоянной K2 на коэффициент RCP91 мощности воздушного винта соответствует мощности, поглощенной винтом Pwp, который делит мощность, вырабатываемую силовой турбиной Pw49, и к результату применяется функция кубического корня, чтобы обеспечить устойчивую часть скорость вращения XNP_Stab.
Измеренное значение скорости XNP вращения вычитают из устойчивой части скорости вращения XNP_Stab через закольцовывание 52. Результат делят на Tau_propeller, затем интегрируют путем инициализации с начальной скоростью XNPInit, выбранной на нуле, чтобы предоставить измеренное значение скорости XNP вращения в rpm.
Преобразование передаточной функции выделяет стабилизированное соотношение между входными сигналами и скоростью вращения при устойчивом XNP_Stab из соотношения переходного режима. Соотношение для установившегося режима рассчитывается непосредственно из модели, преобразованной таким образом, но аналитическое выражение постоянной времени для низкочастотной системы первого порядка невозможно. Постоянная времени Tau_propeller аппроксимируется как функция PW49 путем идентификации динамики XNP с использованием обычных способов идентификации, таких как применение уровня входной мощности, и путем измерения. Это приближение является достаточно точным, чтобы обеспечить получение F-1 (p) для управления воздушным винтом.
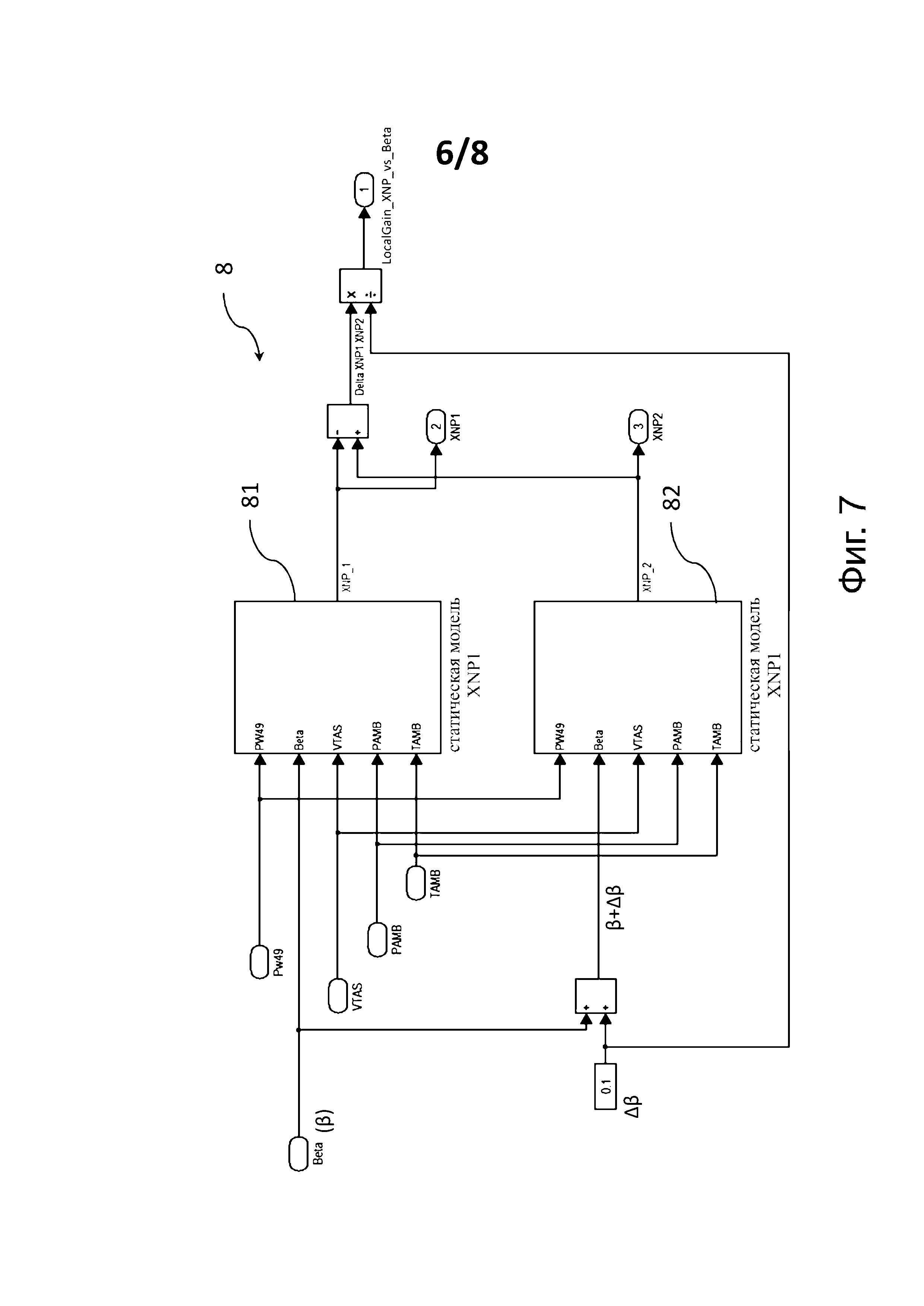
Вычисление локального коэффициента усиления выполняют, как объяснялось ранее, посредством вычисления из статической части модели значений XNP для текущего β и для β + Δβ. Например, Δβ = 0,1° можно выбрать так, чтобы не выходить из области линейности вокруг текущей рабочей точки.
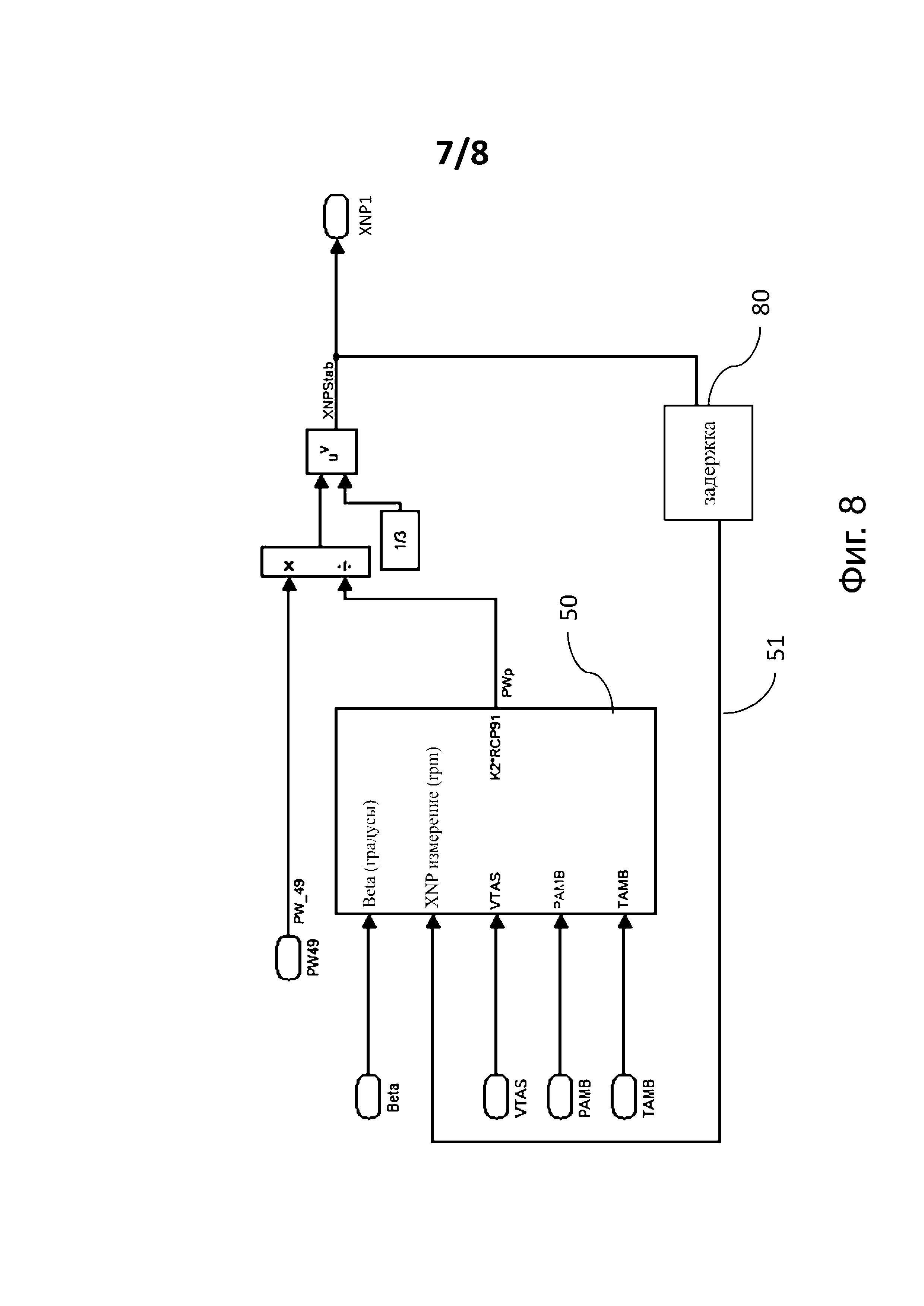
На фиг.7 показан вариант реализации способа вычисления локального коэффициента усиления, который может быть выполнен на компьютере в реальном времени. Этот вариант реализации относится к модулю 8 определения локального коэффициента усиления. Два блока 81, 82 параллельно вводят данные измерения скорости перемещения летательного аппарата VTAS, при угловой скорости вращения воздушного винта ωP (OmegaP), давления воздуха PAMB, температуры окружающей среды TAMB и мощности, вырабатываемой силовой турбиной Pw49. Расположенный выше блок 81, обозначенный статической моделью XNP1, принимает команду β как команду, в то время как блок 82, расположенный в ниже, обозначенный статической моделью XNP2, принимает β + Δβ в качестве команды и, следовательно, поставляет два значения XNP, обозначенные как XNP1 и XNP2. Эти блоки иллюстрируют статическую модель закона функционирования. Получив разностную величину между XNP1 и XNP2, и после деления на Δβ, получают результат, равный значению локального коэффициента усиления, обозначенный как локальный коэффициент усиления XNP vs Beta.
На фиг.8 показана статическая часть модели закона функционирования, схематизированная блоками 81, 82 на фиг.7, в этом случае, расположенный выше блок 81, представлен блоком 50, показанным на фиг.5. Фактически, это статическая часть передаточной функции, показанной на фиг.6: динамическая часть, включающая Tau_Propeller и интегратор, удалена. Также отмечается включение задержки 80 расчетного шага в закольцовывании 51 измерения XNP, так что измерение предшествующего расчетного шага считается заменой интеграции.
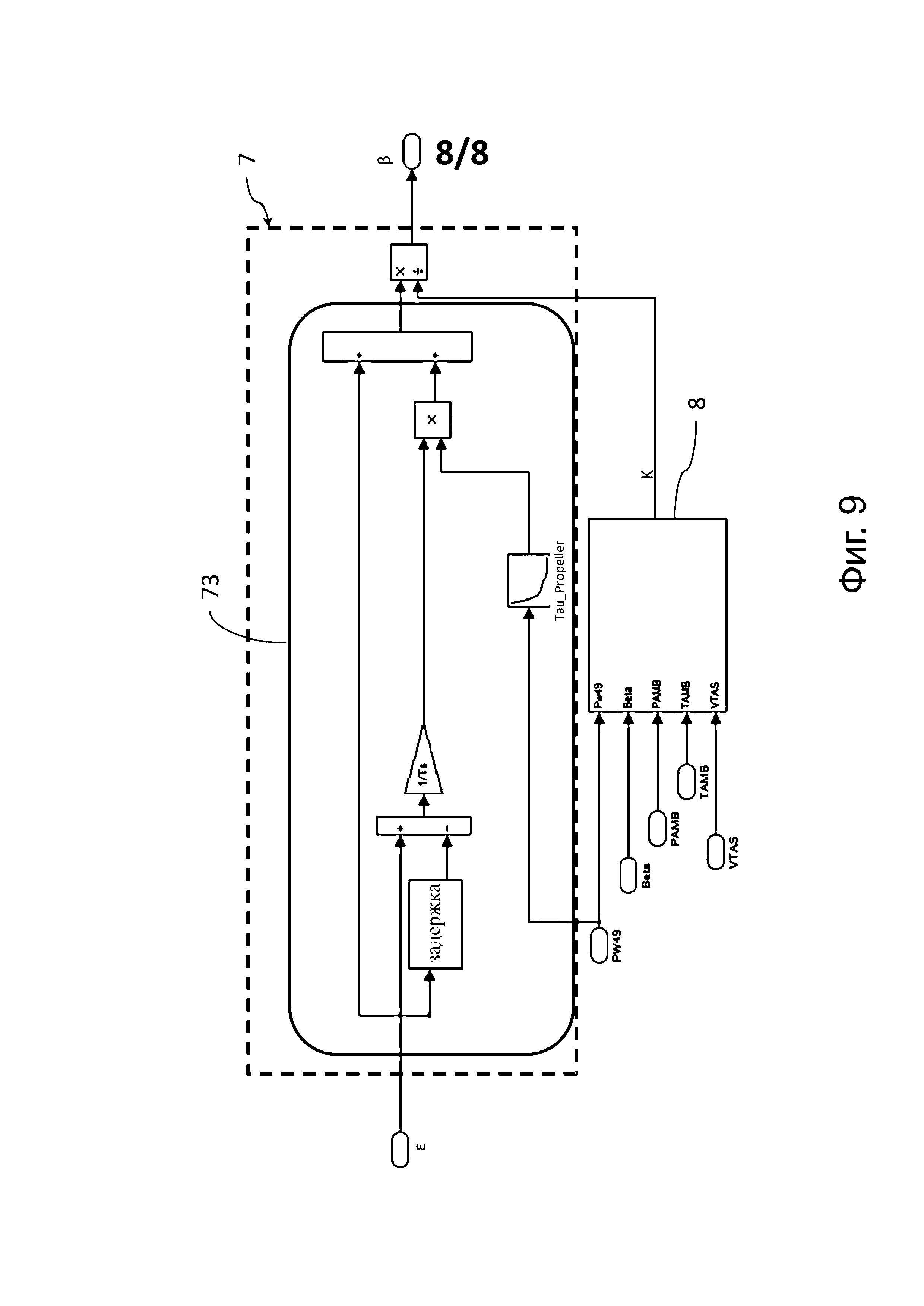
Полная компенсация модели закона функционирования, связывающего XNP с β, наконец, выполняется путем реверса локального коэффициента усиления и фильтра нижних частот порядка 1, соответствующего динамической характеристике системы, как показано на фиг.9. Эта фигура показывает модуль 8 определения локального коэффициента К усиления, проиллюстрированный на фиг. 7, и модуль 7 компенсации закона функционирования посредством фильтра 73 верхних частот, составляющий инверсию динамической части, деленную на локальный коэффициент К усиления, определяемый модулем 8. На входе фильтра 73 верхних частот первого порядка ε представляет собой разность между установленным значением угловой скорости вращения XNP и измеренным значением угловой скорости вращения XNP. В фильтре 73 верхних частот получают разностную величину между текущим ε и ранее вычисленным значением ε, обозначенным задержкой. Эту разностную величину делят на Ts, представляющую собой часть постоянной времени. Результат умножается на Tau_Propeller и затем добавляют к ε. Выходной сигнал фильтра 73 верхних частот делят на локальный коэффициент К усиления, вычисленный модулем 8, в результате чего получают применяемую команду β.
Изобретение не ограничивается описанным вариантом осуществления и показанным на прилагаемых чертежах. Модификации по-прежнему возможны, особенно с точки зрения состава различных элементов или путем замены технических эквивалентов, не выходя за рамки защиты изобретения.
Устройство защиты от утечек масла в сторону роторов турбины газотурбинного двигателя
Способ послойного изготовления детали селективным плавлением или селективным спеканием слоев порошка с оптимальной плотностью посредством высокоэнергетического пучка
Способ присоединения трубы к соединителю и соединительный набор
Многоканальное устройство впрыска для авиационного двигателя
Конструкция корпуса с поворотными секторами обечайки, устанавливаемая между двигателем и гондолой
Усовершенствованная система питания ракетным топливом для космического аппарата
Деталь или узел газотурбинного двигателя и соответствующий газотурбинный двигатель
Газотурбинный двигатель с отбором потока сжатого воздуха
Усовершенствованная система регулирования расхода для питания рабочим телом электрического двигателя космического аппарата
Способы и система вырезания предварительно отформованной заготовки, предназначенной для изготовления детали турбомашины
Способ управления газотурбинной установкой, содержащей электрический двигатель

