Результат интеллектуальной деятельности: Способ пассивного акустического определения местоположения водолаза
Вид РИД
Изобретение
Изобретение относится к пассивному гидроакустическому обнаружению и подводной навигации, конкретно к пассивным способам акустического обнаружения и определения местоположения водолазов и подводных пловцов в толще воды, и может быть использовано при проведении подводных поисковых и спасательных водолазных работ.
Известен способ пассивной акустической локации подводного пловца, при котором высокочастотные (более 1000 Гц) шумы регистрируют направленной антенной, сравнивают полученный уровень шумов с известным фоновым уровнем, при превышении констатируют присутствие пловца в акватории и определяют пеленг на местоположение пловца (Fillinger L., Hunter A.J., Zampolli M., Clarijs M.C. Passive acoustic detection of closed-circuit underwater breathing apparatus in an operational port environment // J. Acoust. Soc. Am. 2012. V. 132. No. 4.P. EL310-EL316).
Недостатком данного способа является использование в качестве исходных данных высокочастотных шумов подводного пловца, что ограничивает дальность пассивной локации водолаза из-за быстрого затухания высокочастотного звука с расстоянием.
Наиболее близким к предлагаемому решению является способ определения местоположения пловца в исследуемой акватории, основанный на обнаружении и выделении из зарегистрированных шумов акватории квазипериодических модуляций неустранимых низкочастотных дыхательных шумов пловца, вызванных ритмом дыхательных маневров, частота которых лежит в диапазоне 0,1-1 Гц. Способ включает установку в акватории нескольких пар акустических датчиков с известными координатами и глубиной постановки, регистрацию ими подводных шумов акватории, выделении из зарегистрированных шумов квазипериодических модуляций неустранимых низкочастотных дыхательных шумов подводного пловца с последующей оценкой местоположения пловца методом триангуляции относительно акустических датчиков на основе определения пересекающихся пеленгов, полученных от акустических датчиков (п. РФ №2556302 С1)
Недостатками данного решения являются низкая точность определения местоположения пловца, поскольку ошибки определения местоположения акустических датчиков масштабируются при построении пересечения пеленгов на удалении от них, приводя к росту ошибки определения местоположения пловца с увеличением его удаления от пары акустических датчиков, а также необходимость достаточно большого количества акустических датчиков, объединенных в пары (при трех парах - 6 акустических датчиков соответственно).
Техническая проблема - разработка нового способа пассивного акустического определения местоположения водолазов по собственным дыхательным шумам на акватории.
Технический результат - увеличение точности определения местоположения водолаза и разрешение местоположения 2-х и более водолазов.
Поставленная проблема решается способом пассивного акустического определения местоположения водолаза, при котором регистрируют подводные шумы акватории в полосе частот ниже 1000 Гц как минимум двумя акустическими датчиками с известными координатами и глубиной и акустическим датчиком водолаза, установленным с возможностью регистрации его дыхательных шумов, осуществляют обработку полученного шумового сигнала для выделения квазипериодических изменений интенсивности шумов, частота которых лежит в диапазоне 0,1-1 Гц, вычисляют функцию взаимной корреляции между откликом акустического датчика водолаза и откликами окружающих водолаза акустических датчиков, определяют величину задержки времени достижения максимума функций взаимной корреляции, рассчитывают дистанцию до водолаза от каждого из удаленных акустических датчиков в виде произведения величины задержки времени на предварительно определенную скорость звука в среде, и дальномерным методом по пересечению сфер определяют местоположение водолаза в пространстве.
Способ осуществляют следующим образом. Акустический датчик, в виде гидрофона или герметизированного изолированного микрофона, устанавливают таким образом, чтобы была возможность регистрировать шумы его дыхания, например, у головы водолаза в водной среде или под водолазным костюмом. В акватории подводных работ устанавливают не менее двух одиночных акустических датчиков, местоположение которых определяют с помощью спутниковой навигации при мелководной постановке (по буйкам с GPS-трекерами на поверхности воды) или с помощью гидроакустической или инерциальной навигационных систем - при глубоководной постановке. На выходах акустических датчиков устанавливают соответствующие усилители и фильтры, ограничивающие интервал регистрируемых шумов наиболее выгодной полосой частот по соотношению сигнал-помеха, которая подбирается в зависимости от типа используемого водолазом дыхательного аппарата. Регистрируют дыхательные шумы водолаза и шумы акватории. Вычисляют функции взаимной корреляции между откликом акустического датчика водолаза и откликами окружающих водолаза акустических датчиков. Определяют величины задержек времени достижения максимумов функций взаимной корреляции. Рассчитывают дистанцию до водолаза от каждого из удаленных акустических датчиков, в виде произведения величины задержки времени максимума функции взаимной корреляции на предварительно определенную любым известным методом скорость звука в исследуемой среде, после чего известным дальномерным методом (по пересечению окружностей в плоскости, или сфер - в трехмерном пространстве) определяют местоположение водолаза внутри акватории.
Пример определения местоположения водолаза, при условии нахождения всех гидрофонов на одной глубине.
На Фиг. 1 приведен вид зависимости модуля коэффициента взаимной корреляции Rxy(t) от задержки времени t между откликами гидрофона водолаза и гидрофона, удаленного на 36 м.
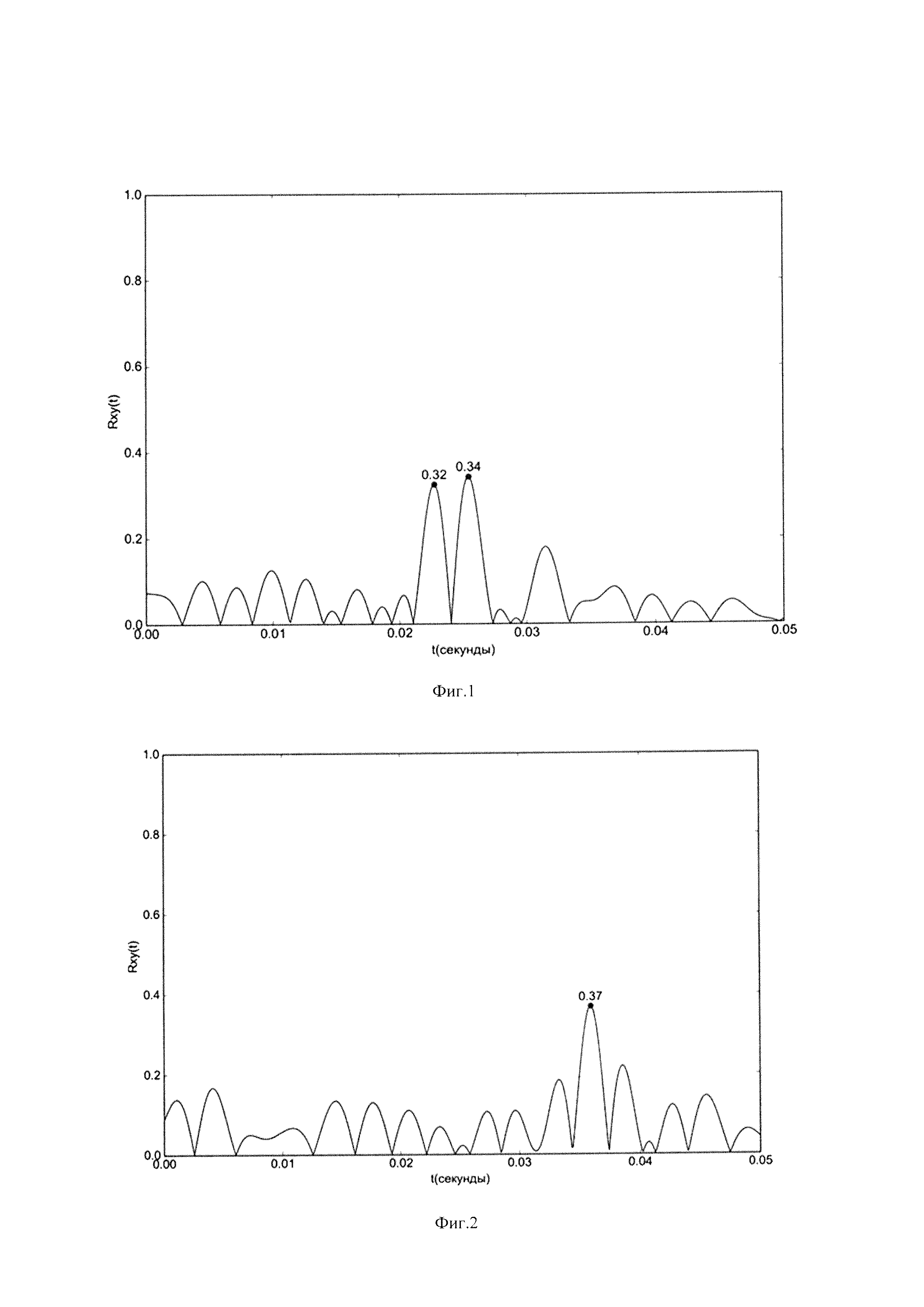
На Фиг. 2 показан вид зависимости модуля коэффициента взаимной корреляции Rxy(t) от задержки времени t между откликами гидрофона водолаза и второго из окружающих гидрофонов, удаленного на 55,3 м.
Водолаз-аквалангист находится на дне мелководной акватории (10 м) и снабжен гидрофоном, установленным на расстоянии 20-30 см от головы водолаза в проекции сверху, способным регистрировать его дыхательные шумы. На удалениях 36 м и 55,3 м от этого гидрофона на дне находятся два окружающих водолаза гидрофона. Удаления между гидрофонами определены по данным GPS с помощью последовательного размещения над каждым из них поплавка с GPS-логгером (Holux М241). Поскольку в рассматриваемом примере все гидрофоны находятся на одной глубине, то для определения местоположения гидрофона водолаза, а с ним и водолаза-аквалангиста, достаточно пересечь две дуги окружностей, центры которых находятся в точке расположения первого и второго окружающих гидрофонов.
Вид зависимости модуля коэффициента взаимной корреляции Rxy(t) от задержки времени t между откликами гидрофона водолаза и гидрофона, удаленного на 36 м, показан на Фиг. 1. Время достижения максимума модуля коэффициента взаимной корреляции (Rxy=0,34) составляет tmax1=0,02545 с. При определенной в данной среде средней скорости звука с=1500 м/с, получаем акустически определяемую дистанцию от этого гидрофона до гидрофона водолаза в виде r1=tmax1 с=38,175 м. Полученная величина различается с полученной по данным GPS на 2, 175 м.
Вид зависимости модуля коэффициента взаимной корреляции Rxy(t) от задержки времени t между откликами гидрофона водолаза и второго из окружающих гидрофонов, удаленного на 55,3 м показан на Фиг. 2. Время достижения максимума модуля коэффициента взаимной корреляции (Rxy=0,37) составляет tmax2=0,03595 с. При средней скорости звука в исследуемой среде с=1500 м/с, получаем акустически определяемую дистанцию от этого гидрофона до дополнительного в виде r2=tmax2 с=53,925 м. Полученная величина различается с полученной по данным GPS на 1, 375 м.
Поскольку в рассматриваемом примере все гидрофоны находятся на одной глубине, то для определения местоположения гидрофона водолаза, достаточно пересечь две дуги окружностей, центры которых находятся в точке расположения окружающих гидрофонов. При этом невязка местоположения гидрофона водолаза относительно данных GPS составит не более 2,175 м. Это существенно меньше, чем обеспечивает триангуляционный метод по прототипу, невязка для которого составляет на дистанциях 40-50 м от водолаза до удаленных гидрофонов не менее 4-7 м. (Ширяев А.Д., Коренбаум В.И., Горовой С.В., Костив А.Е.. Подходы к акустической оценке перемещения водолаза-аквалангиста по излучаемым им дыхательным шумам // Тез. 8-й конференции молодых ученых «Океанологические исследования», Владивосток: Дальнаука, 2018 С. 183-187).
Для повышения точности определения местоположения водолаза, в том числе в случае, когда глубины датчика водолаза и окружающих акустических датчиков различны, а также в случае присутствия находящегося рядом с ним второго водолаза, необходимо использовать не менее трех акустических датчиков с известными координатами и глубиной.
Предлагаемый способ по сравнению с триангуляционным способом прототипа дополнительно дает возможность разрешения местоположения 2-х и более водолазов, оснащенных каждый своим акустическим датчиком. Действительно, при использовании способа прототипа с применением взаимно корреляционной обработки только по откликам удаленных акустических датчиков источники шумов двух водолазов интерферируют, что не позволяет разрешить их в пространстве. Тогда как в предлагаемом способе эта проблема устраняется наличием своего акустического датчика у каждого из водолазов.
В то же время для повышения информативности возможно и совместное использование предлагаемого способа с триангуляционным способом по удаленным гидрофонам.
Математическая обработка зарегистрированных датчиками сигналов осуществляется на едином посту, на который сигналы могут быть переданы как по кабельным линиям связи (для акустического датчика водолаза линия может быть объединена со шлангом подачи дыхательной смеси), так и путем беспроводной передачи сигналов от всех используемых акустических датчиков по акустическому каналу связи (при сравнительно больших глубинах погружений) или радиоканалу через поверхностные буйки (при мелководных погружениях), что делает возможным функционирование предложенного способа и с автономно работающими легко водолазами.
Таким образом, предлагаемый новый способ пассивного акустического определения местоположения водолаза за счет установки дополнительного акустического датчика, регистрирующего дыхательные шумы водолаза, вычисления задержек максимумов взаимно-корреляционных функций откликов дополнительного и удаленных акустических датчиков и использования для определения местоположения водолаза разностно-дальномерным методом позволяет решить обозначенную проблему и достичь заявленного технического результата.
Способ пассивного акустического определения местоположения водолаза, при котором регистрируют подводные шумы акватории в полосе частот ниже 1000 Гц как минимум двумя с известными координатами и глубиной акустическими датчиками и акустическим датчиком водолаза, установленным с возможностью регистрации его дыхательных шумов, осуществляют обработку полученного шумового сигнала для выделения квазипериодических изменений интенсивности шумов, частота которых лежит в диапазоне 0,1-1 Гц, вычисляют функцию взаимной корреляции между откликом акустического датчика водолаза и откликами окружающих водолаза акустических датчиков, определяют величину задержки времени достижения максимума функций взаимной корреляции, рассчитывают дистанцию до водолаза от каждого из удаленных акустических датчиков в виде произведения величины задержки времени на измеренную скорость звука в среде, и дальномерным методом по пересечению сфер определяют местоположение водолаза в пространстве.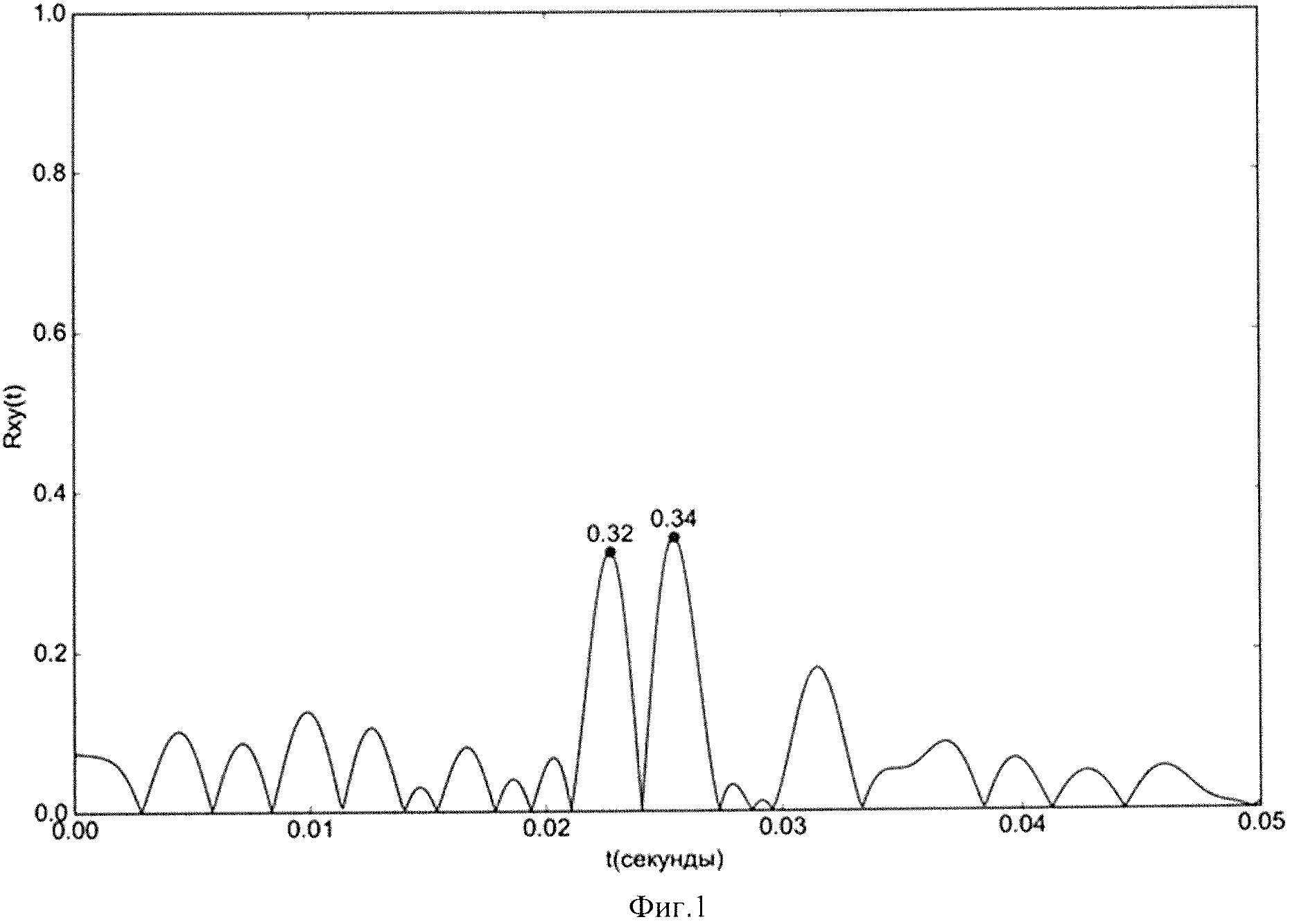
Система подачи топлива двигательной установки космического аппарата
Способ и устройство генерации импульсного гамма-излучения короткоживущих изомеров атомных ядер
Способ стабилизации параметров лампы бегущей волны (лбв) при настройке передатчика свч
Устройство детектирования каналов видеоконференцсвязи в системах передачи с временным уплотнением
Система поиска разнородной информации в локальной компьютерной сети
Мультиплексирующий цифровой коррелятор
Способ эвакуации экипажа из аварийной подводной лодки
Устройство обеспечения чистоты полезной нагрузки под сборочно-защитным блоком ракеты космического назначения
Ключевой усилитель мощности
Устройство закрывания и фиксации крышки люкового устройства
Способ контроля состояния дыхательной системы больных обструктивными заболеваниями легких на дому
Трехкомпонентный векторно-скалярный приемник
Комбинированный векторно-скалярный приемник
Трехкомпонентный векторно-скалярный приемник, линейная гидроакустическая антенна на его основе и способ формирования однонаправленной характеристики направленности тракта обнаружения источников подводных шумов
Способ диагностики нарушений бронхиальной проходимости
Способ просветного акустического зондирования легких

