Результат интеллектуальной деятельности: Устройство позиционирования мобильных агрегатов при возделывании агрокультур
Вид РИД
Изобретение
Предлагаемое устройство относится к сельскому хозяйству, в частности к технологиям и автоматизированным устройствам регулирования технологических процессов производства агропродукции в растениеводстве и может найти применение в различных регионах страны при производстве агропродукции, для комплексной автоматизации технологических процессов возделывания растениеводческой продукции в полеводстве.
Известны устройства позиционирования мобильных агрегатов при возделывании агрокультур (авторское свидетельство СССР №1211704; патенты РФ №№2112361, 2135955, 2228607, 2251240, 2265989, 2295218, 2377764, 2424540, 2471398, 2538997, патенты США №№6070673, 6199000, патент WO №9915987 и другие).
Из известных устройств наиболее близким к предлагаемому является «Устройство позиционирования мобильных агрегатов при возделывании агрокультур» (патент РФ №2471338, A01G 7/00, 2010), которое и выбрано в качестве прототипа.
Данное устройство позволяет непрерывно оценивать качество выполняемых технологических процессов и при необходимости оперативно и экономно воздействовать на ход технологического процесса для повышения его качества, а также для увеличения продуктивности агрокультур.
В состав устройства входит беспилотный дистанционно управляемый вертолет 20, который производит облет возделываемого угодья 18.
Однако функциональные возможности вертолета используются не в полной мере. Он может использоваться и для дистанционного структурного анализа почвы возделываемого угодья и обнаружения различных металлических изделий (трубопроводов, металлических конструкций и т.п.).
Технической задачей изобретения является расширение функциональных возможностей беспилотного дистанционно управляемого вертолета путем дистанционного структурного анализа почвы возделываемого угодья и обнаружения различных металлических изделий, скрытых под земной поверхностью.
Поставленная задача решается тем, что устройство позиционирования мобильного средства при возделывании агрокультур, содержащее, в соответствии с ближайшим аналогом, первый блок искусственного зрения, размещенный на наземном мобильном средстве, блок обработки видеосигнала, беспилотный летательный аппарат, беспилотный дистанционно управляемый вертолет, второй блок искусственного зрения, два блока передачи-приема данных, блок тестирования и управления, блок ориентации в трехмерных координатах, при этом беспилотный дистанционно управляемый вертолет имеет возможность двигаться в пределах возделываемого угодья, первый блок передачи-приема данных, блок встроенного тестирования и управления, блок ориентации в трехмерных координатах установлены на наземном мобильном средстве, второй блок искусственного зрения и второй блок передачи-приема данных размещены на беспилотном дистанционно управляемом вертолете, при этом выход второго блока искусственного зрения соединен с входом второго блока передачи-приема данных, выход первого блока передачи-приема данных соединен с первым входом блока встроенного тестирования и управления, выход блока ориентации в трехмерных координатах соединен со вторым входом блока встроенного тестирования и управления, отличается от ближайшего аналога тем, что беспилотный дистанционно управляемый вертолет снабжен синхронизатором, переключателем сектора обзора, генератором строб-импульса и четырьмя радиолокаторами, каждый из которых состоит из последовательно включенных передатчика, управляющий вход которого соединен с выходом синхронизатора, антенного переключателя, вход-выход которого связан с приемопередающей антенной, а управляющий вход соединен с выходом
переключателя сектора обзора приемника, управляющий вход которого через генератор строб-импульса соединен с выходом синхронизатора, и блока обработки сигнала, управляющий вход которого соединен с выходом синхронизатора, а выход подключен к соответствующему входу второго блока передачи-приема данных, связанного радиоканалом с первым блоком передачи-приема данных и блоком тестирования и управления, причем приемопередающие антенны размещены на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатываются по алгоритму синтезированной апертуры.
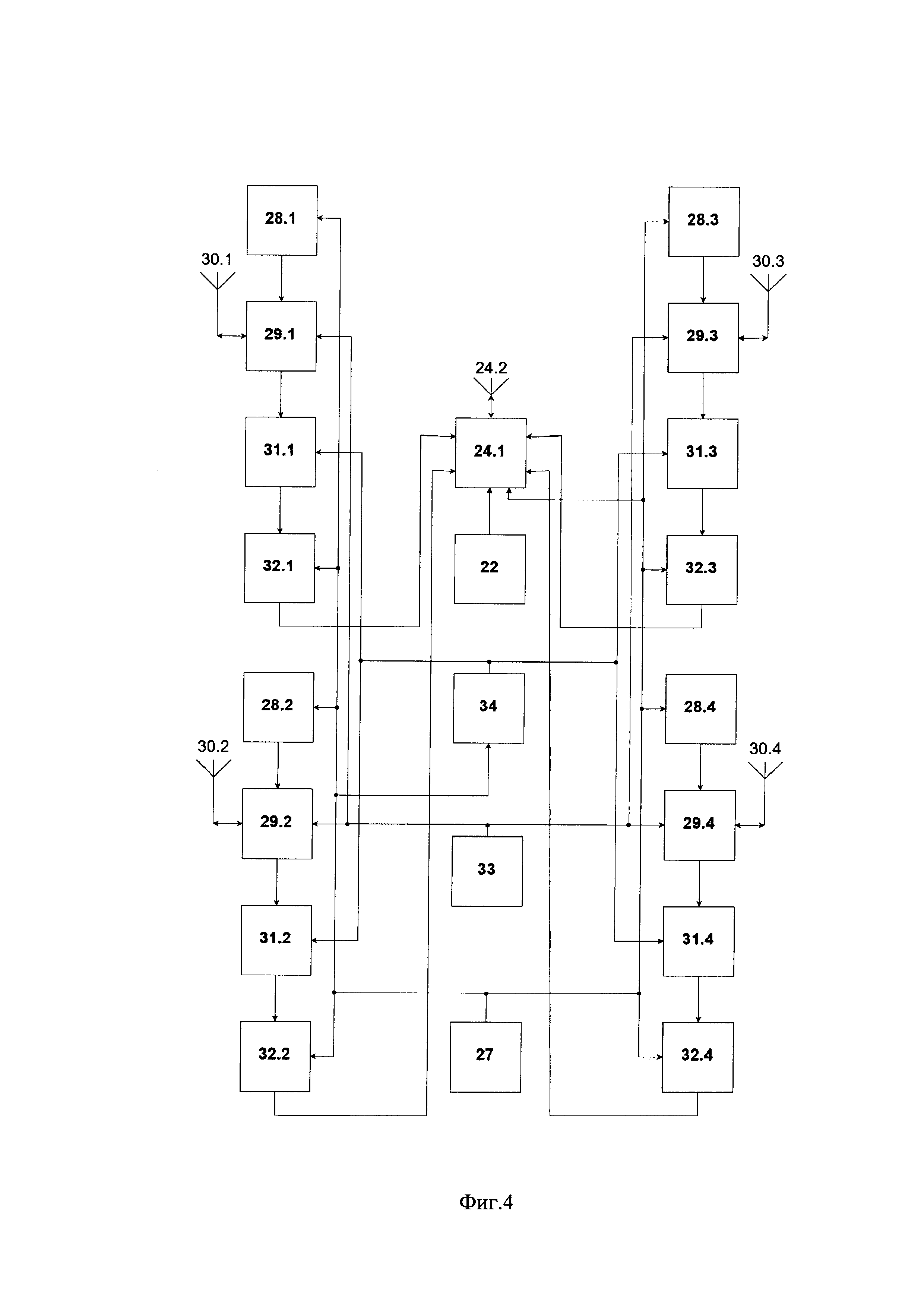
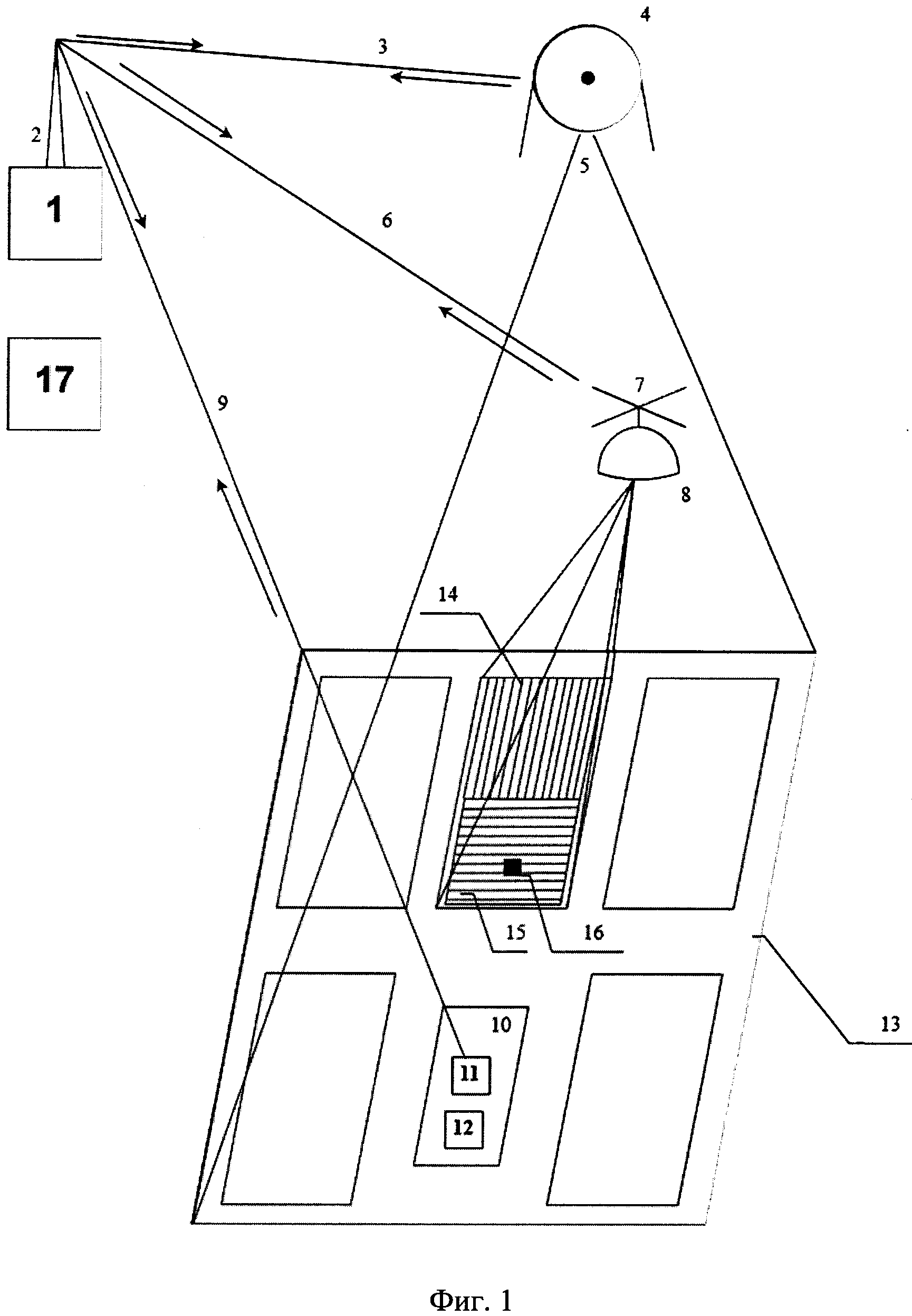
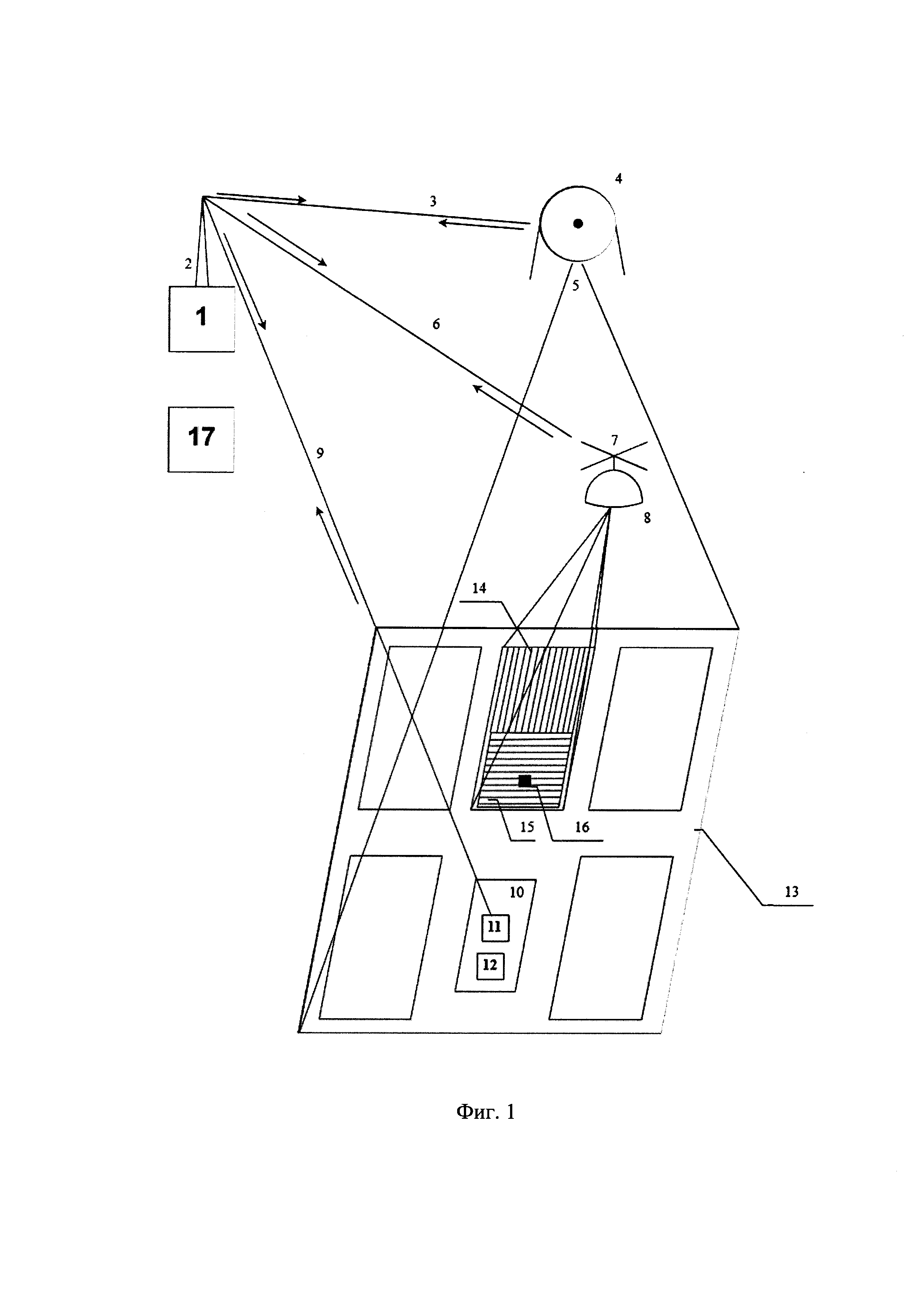
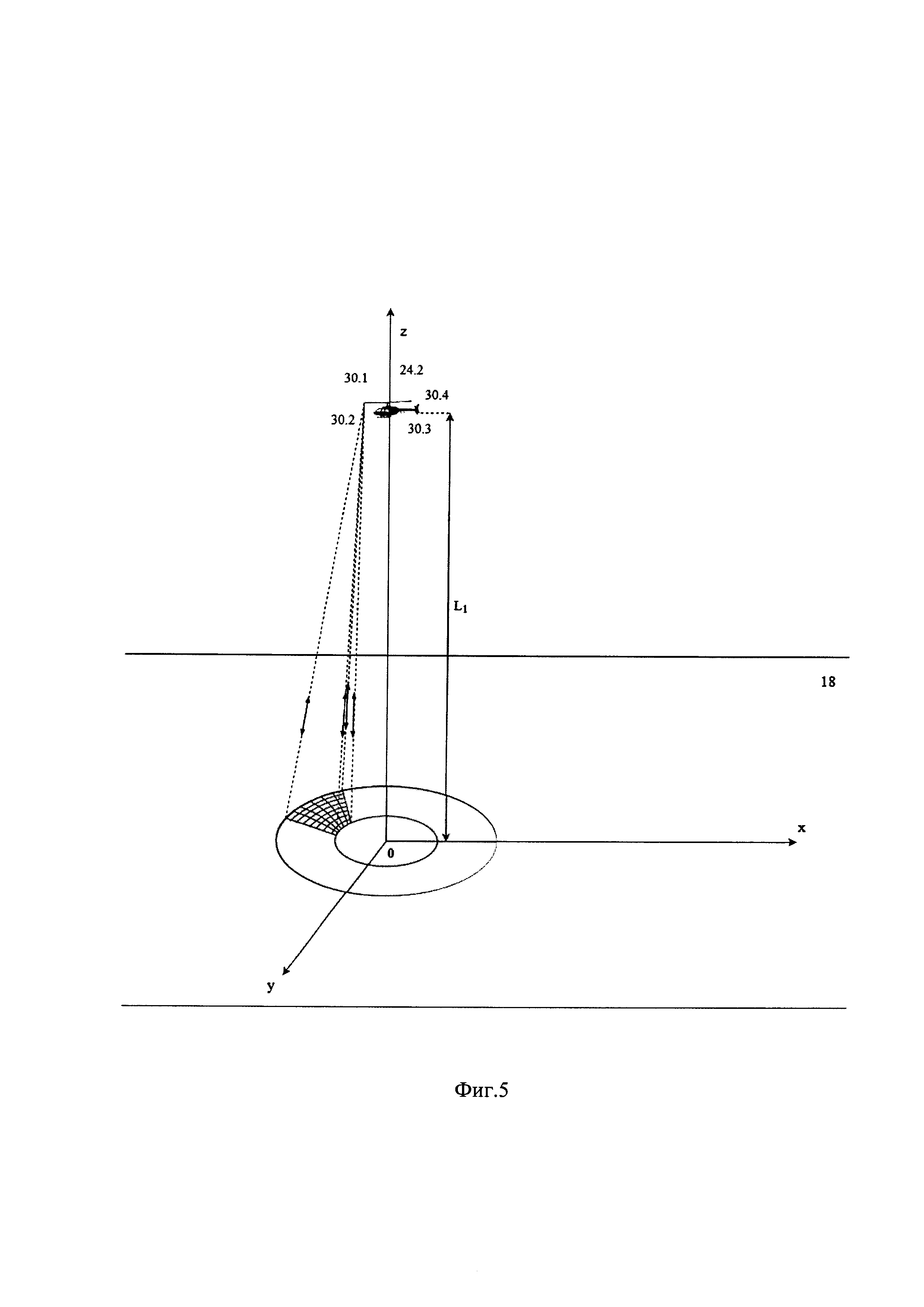
Структурная схема исполнения способа позиционирования мобильных агрегатов при производстве агропродукции изображена на фиг. 1. Схема возделываемого угодья и мобильные исполнительные средства изображены на фиг. 2. Структурная схема устройства управления мобильным агрегатом представлена на фиг. 3. Структурная схема аппаратуры вертолета представлена на фиг. 4. Расположение приемопередающих антенн на концах лопастей несущего винта вертолета показано на фиг. 5. На фиг. 1-3 изображено: центр управления 1; базовая станция приема-передачи информации 2; канал связи 3 со спутником; космический спутник 4; средство 5 космического видеомониторинга; канал связи 6 с летательным аппаратом; беспилотный летательный аппарат 7; средство 8 воздушного видеомониторинга; канал связи 9 с мобильным агрегатом; наземный мобильный агрегат 10; средство 11 наземного стеремониторинга; регулируемый рабочий орган 12; местность 13 размещения посевов агрокультур; неблагоприятный посев агрокультур 14; депрессивная зона 15 произрастания агрокультуры; место 16 произрастания растений; площадка 17 для размещения мобильных средств; возделываемое поле 18; наземное мобильное средство 19; беспилотный дистанционно управляемый вертолет 20; первый блок 21 искусственного зрения; второй блок 22 искусственного зрения; первый блок 23 передачи-приема данных; второй блок 24 передачи-приема данных; блок 25 встроенного тестирования и управления; блок 26 ориентации в трехмерных координатах; синхронизатор 27; передатчик 28i; антенный переключатель 29i; приемопередающая антенна 30i; приемник 31i; блок обработки 32i (i=1, 2, 3, 4); переключатель 33 сектора обзора; генератор 34 строб-импульса.
Способ реализуется следующим образом. В период возделывания агрокультуры, с момента появления всходов до сбора урожая осуществляют видеомониторинг возделываемого угодья с помощью средства 5 космического видеомониторинга, видеокамер, установленных на орбитальном космическом спутнике 4. В качестве информационного источника выбирается спутник, траектория полета которого совпадает с местностью размещения посевов агрокультур, в результате многократного пролета спутника над выбранной территорией периодически регистрируют видеоцифровые изображения местности размещения посевов агрокультур 13 и передают через канал связи 3 на базовую станцию 2 приема-передачи информации, в центр управления 1. В интерактивном или автономном режиме, с помощью средств компьютерного зрения, на цифровых изображениях регистрируют контуры полей и определяются параметры морфологических признаков (форма, площадь, периметр, ортогональные геометрические размеры, цветовой тон, насыщенность цвета, гистограмма распределения цветовой окраски почвы и растений и др.). В результате анализа последовательного ряда цифровых изображений местности выявляют динамику параметров морфологических признаков на выделенных контурах полей и по контрасту определяют неблагоприятные посевы агрокультур 14, направляют туда беспилотный летательный аппарат 7, который может вести обработку посевов (ядохимикатами, стимуляторами роста) и одновременно производить видеомониторинг растений в посадках. Полученные данные с беспилотного летательного аппарата 7 передают по беспроводной связи 6 на базовую станцию 2, где находится информационно-аналитический центр управления 1. После анализа совокупности видеоцифровых изображений, полученных с летательного аппарата 7, по контрасту морфологических признаков обнаруживают контур депрессивной зоны 15 произрастания растений и определяют местоположение депрессивной зоны на карте неблагоприятного поля 14, регистрируют параметры морфологических признаков депрессивной зоны (форма, площадь, периметр, ортогональные геометрические размеры, цветовой тон, насыщенность цвета, число растений на 1 м2, распределение цветовой окраски листовой поверхности растений).
В обнаруженные зоны депрессивного развития направляют наземный мобильный агрегат 10 для выполнения соответствующих агротехнологических операций, предотвращающих распространение депрессивной зоны 15 или оздоравливающих растения. Мобильный агрегат осуществляет работу не по всему полю, а только в границах депрессивной зоны, тем самым, экономя материальные и энергетические ресурсы.
На фиг. 2-5 показано устройство позиционирования мобильных агрегатов при возделывании агрокультур.
Первый блок искусственного зрения 21, первый блок приема-передачи данных 23, блок непрерывного встроенного тестирования и управления 25, блок ориентации в трехмерных координатах 26 установлены на наземном мобильном средстве 19; второй блок искусственного зрения 22, второй блок приема-передачи данных 24.1 с приемопередающей антенной 24.2, синхронизатор 27, передатчики 28i, антенные переключатели 29i, приемопередающие антенны 30i, приемники 31i, блоки обработки 32i (i=1, 2, 3, 4), переключатель 33 сектора обзора и генератор 34 строб-импульса размещены на беспилотном дистанционно управляемом вертолете 20. Выход первого блока искусственного зрения 21 соединен с первым входом блока встроенного тестирования и управления 25, выход второго блока искусственного зрения 22 соединен с входом второго блока приема-передачи данных 24.1, выход блока ориентации в трехмерных координатах 26 соединен с вторым входом блока встроенного тестирования и управления 25, выход второго блока приема-передачи данных 24 соединен с третьим входом блока встроенного тестирования и управления через радиоканал.
Каждый из четырех радиолокаторов, размещенных на борту вертолета, состоит из последовательно включенных передатчика 28i, управляющий вход которого соединен с выходом синхронизатора 27, антенного переключателя 29i, вход-выход которого связан с приемопередающей антенной 30i, а управляющий вход соединен с выходом переключателя 33 сектора обзора, приемника 31i, управляющий вход которого соединен через генератор 34 строб-импульса с выходом синхронизатора 27, и блок обработки 32i, управляющий вход которого соединен с выходом синхронизатора 27, а выход подключен к соответствующему входу второго блока передачи-приема данных 24.1 (i=1, 2, 3, 4). Причем, приемопередающие антенны 30i (i=1, 2, 3, 4) размещены на концах лопастей несущего винта вертолета 20, принятые ими сигналы обрабатываются по алгоритму синтезированной апертуры.
Устройство работает следующим образом.
В соответствии с регламентом технологического процесса беспилотный дистанционно управляемый вертолет 20 производит облет возделываемого угодья 18. При облете производится обзор возделываемого угодья четырьмя радиолокаторами с λ1=5 м, λ2=1 м, λ3=0,6 м, λ4=0,003 м для структурного анализа почвы и обнаружения различных металлических конструкций, скрытых под земной поверхностью. Вырабатываемые в синхронизаторе 27 импульсы запускают четыре передатчика 28.1-21.4 и управляют четырьмя блоками 32.1-32.4 обработки. Импульс синхронизатора 27 также управляет работой генератора 34 строб-импульса и второго блока 24.1 приема-передачи данных. Длительность и положение во времени строб-импульса определяют положение и протяженность наблюдаемого элемента земной поверхности по дальности. Этот импульс попадает на блоки 32.1-32.4 обработки.
Способность радиоволн проникать внутрь среды (в толщину почвы, льдов, снегов и т.п.) обеспечивает принципиальную возможность структурного анализа почвы и обнаружения объектов (металлических предметов, трубопроводов, старой с/х техники и т.п.), скрытых под земной поверхностью, т.е. решения задач подповерхностного зондирования.
Использование четырех радиолокаторов с различными длинами волн обусловлено различным характером почвы возделываемого угодья.
Каждый передатчик работает на своей длине волны, которая определяет глубину проникновения электромагнитного излучения под подстилающую поверхность.
Зондирующие импульсы с передатчиков 28.1-28.4 через антенные переключатели 29.1-29.4 поступают на свои антенны 30.1-30.4, каждая из которых расположена на конце лопасти несущего винта вертолета 20.
Каждая антенна, расположенная на конце вращающейся лопасти, подключается к своему передатчику и приемнику, только в момент прохождения определенного заранее установленного сектора обзора. Это осуществляется с помощью переключателя 33 сектора обзора, который представляет собой электрический контакт, выполненный в виде четырех щеток, расположенных под соответствующими лопастями, перемещающихся в процессе вращения по неподвижному токопроводящему сегменту, который в свою очередь может устанавливаться в фиксированном положении вокруг оси винта. Каждые передатчик и приемник подключаются к антенне только в период прохождения соответствующей щетки по сегменту. Положение сегмента определяет положение сектора обзора в пространстве.
С антенн 30.1-30.4 сигналы излучаются в направлении подстилающей поверхности. Отраженные сигналы принимаются антеннами 30.1-30.4 и через антенные переключатели 29.1-29.4 подаются на приемники 31.1-31.4, а затем на блоки 32.1-32.4 обработки, в которых осуществляется обработка принятых сигналов по алгоритму синтезирования апертуры. В блоках 32.1-32.4 обработки обрабатываются сигналы, принятые только с определенного участка дальность, положение и протяженность которого определяются стробирующим импульсом, подаваемым с генератора 33. С блоков 32.1-32.4 обработки сигнала через второй блок 24.1 приема-передачи данных и радиоканал поступают на третий вход блока 25 встроенного тестирования и управления, который снабжен индикатором с цветным изображением.
Применение четырех радиолокаторов с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м с синтезированной апертурой позволяет обнаружить и определить координаты металлических предметов, расположенных под подстилающей поверхностью земли, с высокой угловой разрешающей поверхностью. При этом, одновременно по цвету изображения можно судить о структурных свойствах почвы и глубины расположения металлических предметов под поверхностью земли.
Предлагаемые радиолокаторы с синтезированной апертурой и антеннами, расположенными на концах вращающихся лопастей несущего винта и работающих на разных частотах, позволяют с большей разрешающей способностью и достоверностью провести структурный анализ почвы и определить различные металлические конструкции и трубопроводы, находящиеся под поверхностью земли.
Технические средства второго блока 22 искусственного зрения производят съемку фрагментов возделываемого угодья. С помощью второго блока 24.1 передачи-приема данных видеоинформация, зафиксированная вторым блоком 22 искусственного зрения, и информация о структурных свойствах почвы и об обнаруженных металлических конструкциях, зафиксированная четырьмя радиолокаторами, передается на первый блок 23 передачи-приема данных, а затем поступает в блок 25 встроенного тестирования и управления. Данный блок обрабатывает полученную информацию и вырабатывает управляющие команды наземному мобильному средству 19 на выполнение технологических операций на депрессивных участках возделываемого угодья или на депрессивных растениях, а также координаты обнаруженной металлической конструкции. Данная информация используется при дальнейшем функционировании агрокомплекса для оценки выполненной технологической операции и для ретроспективного анализа. Для депрессивных или других участков возделываемого угодья, обнаруженных по результатам воздушного видеоконтроля и на которых выполняют рабочими агрегатами 26 агротехнологические операции, для повышения точности и качества их выполнения, результат воздушного видеоконтроля в виде двухмерных изображений места расположения растений преобразовывают в блоке 25 в трехмерные изображения путем привлечения дополнительных результатов стереовидеоконтроля растений средством искусственного зрения 21 с мобильного агрегата. Поэтому, при выполнении технологических операций рабочие органы 26 мобильного агрегата 19 ориентируются в трехмерных координатах.
Таким образом, предлагаемое устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения, обеспечивает не только комплексную автоматизацию технологических процессов возделывания растениеводческой продукции в полеводстве, но и дистанционный структурный анализ почвы возделываемого угодья и обнаружения металлических конструкций, скрытых под поверхностью земли. Это достигается использованием четырех радиолокаторов с синтезированной апертурой и антеннами, расположенными на концах вращающихся лопастей несущего винта, и работающих на разных частотах.
Тем самым функциональные возможности устройства расширены.
Устройство позиционирования наземного мобильного средства при возделывании агрокультур, содержащее первый блок искусственного зрения, размещенный на наземном мобильном средстве, блок обработки видеосигнала, беспилотный летательный аппарат, беспилотный дистанционно управляемый вертолет, второй блок искусственного зрения, два блока передачи-приема данных, блок тестирования и управления, блок ориентации в трехмерных координатах, при этом беспилотный дистанционно управляемый вертолет имеет возможность двигаться в пределах возделываемого угодья, первый блок передачи-приема данных, блок встроенного тестирования и управления, блок ориентации в трехмерных координатах установлены на наземном мобильном средстве, второй блок искусственного зрения и второй блок передачи-приема данных размещены на беспилотном дистанционно управляемом вертолете, при этом выход второго блока искусственного зрения соединен с входом второго блока передачи-приема данных, выход первого блока передачи-приема данных соединен с первым входом блока встроенного тестирования и управления, выход блока ориентации в трехмерных координатах соединен со вторым входом блока встроенного тестирования и управления, отличающееся тем, что беспилотный дистанционно управляемый вертолет снабжен синхронизатором, переключателем сектора обзора, генератором строб-импульса и четырьмя радиолокаторами, каждый из которых состоит из последовательно включенных передатчика, управляющий вход которого соединен с выходом синхронизатора, антенного переключателя, вход-выход которого связан с приемопередающей антенной, а управляющий вход соединен с выходом переключателя сектора обзора приемника, управляющий вход которого через генератор строб-импульса соединен с выходом синхронизатора, и блока обработки сигнала, управляющий вход которого соединен с выходом синхронизатора, а выход подключен к соответствующему входу второго блока приема-передачи данных, связанного радиоканалом с первым блоком передачи-приема данных и блоком тестирования и управления, причем приемопередающие антенны размещены на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатываются по алгоритму синтезированной апертуры.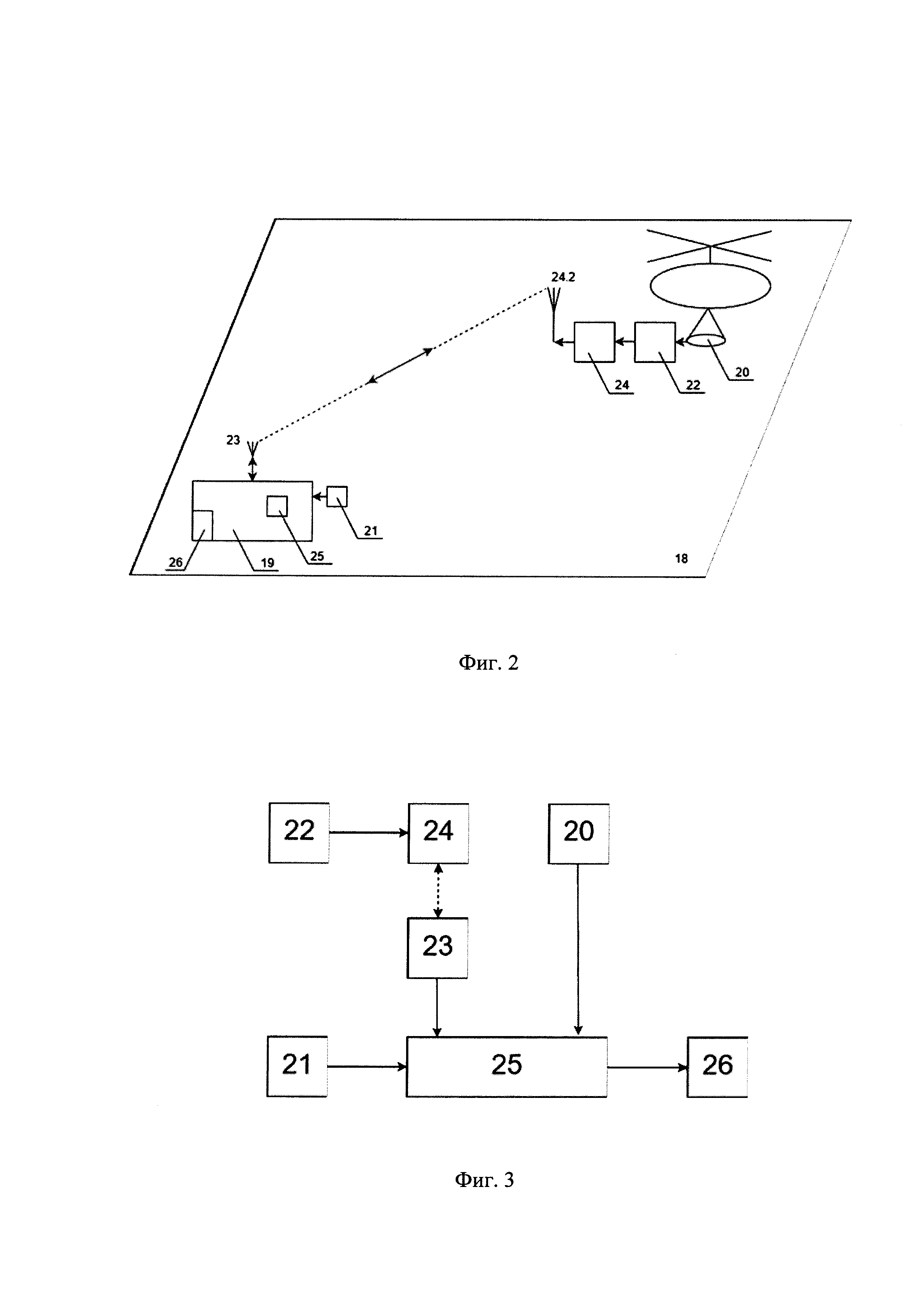
Припойная паста
Припойная паста
Индуктивный датчик тахометрического счетчика жидкости
Система автоматического управления микроклиматом в помещениях для размещения животных
Система интеллектуального управления и контроля параметров и режимов работы машин и оборудования ферм по производству молока
Кодовая шкала
Способ безразборной диагностики изменений технического состояния судовых рулевых устройств в результате воздействия ледовых нагрузок и устройство для его реализации
Способ определения расхода жидкости в трубопроводе
Индукционный датчик углового положения
Система дистанционного контроля состояния атмосферы и ледяного покрова в северных районах
Способ аэродинамического профилирования бортов карьеров и угольных разрезов
Способ синхронизации часов и устройство для его реализации
Радиоприемное устройство для обнаружения широкополосных сигналов с фазовой манипуляцией
Способ и система радиочастотной идентификации и позиционирования железнодорожного транспорта
Способ определения скорости распространения и направления прихода ионосферного возмущения
Система противопожарной защиты контейнерной базовой несущей конструкции
Способ обнаружения, идентификации и определения скорости движения транспортного средства.
Устройство для определения частоты, вида модуляции и манипуляции принимаемых сигналов
Способ контроля состояния конструкции здания или инженерно-строительного сооружения и устройство для его осуществления
Система контроля соблюдения правил дорожного движения

