Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛИРОВАНИЯ УСТРОЙСТВА МАГНИТНОГО ПОДШИПНИКА
Вид РИД
Изобретение
Изобретение относится к способу контролирования устройства магнитного подшипника.
Кроме того, изобретение относится к управляющему блоку со средствами для выполнения такого способа.
Дополнительно к этому, изобретение относится к носителю информации, содержащему компьютерную программу для выполнения способа при исполнении в управляющем блоке.
Кроме того, изобретение относится к сенсорному устройству для выполнения такого способа.
Дополнительно к этому, изобретение относится к устройству магнитного подшипника по меньшей мере с одним магнитным подшипником и по меньшей мере одним сенсорным устройством.
Кроме того, изобретение относится к электрической вращающейся машине по меньшей мере с одним устройством магнитного подшипника.
Такой способ используется, в частности, в активном магнитном подшипнике быстро вращающейся электрической машины, например, двигателя, генератора, компрессора или турбины. Например, быстро вращающаяся электрическая машина может работать с мощностью по меньшей мере 1 МВт и скоростью вращения по меньшей мере 5000 об/мин, однако изобретение не ограничивается такими машинами.
Регулирование положения активного магнитного подшипника осуществляется с помощью измерительных значений положения относительно положения тела вращения. Тело вращения является, например, ротором вращающейся электрической машины. Измерительные значения положения измеряются с помощью датчиков расстояния. Если один такой датчик выходит из строя или датчик поставляет неправильные измерительные значения, то регулирование положения больше не в состоянии удерживать тело вращения в правильном положении. Для контролирования целостности устройства магнитного подшипника в электрической вращающейся машине, требуется постоянная проверка функциональности датчиков положения и определения положения в целом, и при обнаружении неисправности перевод электрической вращающейся машины в безопасное состояние.
Поскольку регулирование положения осуществляется на основе имеющихся измерительных значений положения в направлении целевой точки, то не обеспечивается возможность определения целостности измерительных значений положения, которые используются для регулирования, лишь из использованных измерительных значений положения.
В патенте DE 10 2009 039 485 В4 приведено описание регулировочной системы и способа для регулирования магнитного подшипника.
В опубликованной заявке DE 42 15 381 А1 приведено описание системы с двумя сенсорными блоками для измерения радиального и/или осевого положения вала, которые состоят каждый по меньшей мере из одной пары примерно диаметрально противоположно лежащих датчиков.
В опубликованной заявке ЕР 3 203 191 А1 приведено описание сенсорного устройства для устройства магнитного подшипника, которое имеет датчик сдвига и сенсорное кольцо.
В основе изобретения лежит задача улучшения контролирования определения положения тела вращения в активном магнитном подшипнике.
Эта задача решена, согласно изобретению, с помощью способа контролирования устройства магнитного подшипника, которое имеет первую пару по меньшей мере по существу диаметрально противоположно лежащих датчиков и вторую пары по меньшей мере по существу диаметрально противоположно лежащих датчиков, которая расположена с угловым смещением относительно первой пары, при этом соответствующее расстояние датчика до тела вращения, которое расположено внутри пар датчиков, измеряется посредством усреднения во времени множества измерений расстояния, при этом расстояния сравниваются, при этом, как только разница расстояний превышает предельное значение, то выдается сигнал предупреждения.
Кроме того, задача решена, согласно изобретению, с помощью управляющего блока, носителя информации, содержащего компьютерную программу для выполнения способа, сенсорного устройства, устройства магнитного подшипника и электрической вращающейся машины с указанными в п.п. 9-13 признаками.
Приведенные ниже относительно способа преимущества и предпочтительные варианты выполнения могут быть по смыслу перенесены на управляющий блок, носитель информации, содержий компьютерную программу для выполнения способа , сенсорное устройство, устройство магнитного подшипника и электрическую вращающуюся машину.
В основе изобретения лежит идея соединения в активном магнитном подшипнике сенсорной оценки двух независимо регулируемых сенсорных осей, которые расположены с угловым смещением относительно друг друга, с соответствующей другой парой датчиков расстояния и тем самым выполнения проверки связности данных датчиков. Активный магнитный подшипник выполнен в виде радиального подшипника или в виде осевого подшипника. Под проверкой связности понимается, например, проверка данных датчика относительно их целостности. Данные датчика, например, не имеют связности, если выходит из строя один датчик расстояния, или, например, за счет дрейфа датчика он поставляет неправильные измерительные данные, при этом за счет такой несвязности тело вращения больше невозможно регулировать в правильное положение.
При проверке связности измеряются соответствующие расстояния датчиков до тела вращения с усреднением во времени множества измерений расстояния. Усредненные во времени значения сравниваются друг с другом. Несвязность данных датчиков имеется при различии расстояний, при этом, как только разница расстояний превышает предельное значение, то выдается сигнал предупреждения. Предельное значение следует выбирать так, что предотвращается неправильное инициирование сигнала, однако тем не менее надежно предотвращается столкновение тела вращения, например, с улавливающим подшипником. Сигнал предупреждения является акустическим, оптическим и/или электрическим сигналом, при этом при сигнале предупреждения электрическая вращающаяся машина переводится в безопасное состояние. Электрическая машина является, например, двигателем, генератором, компрессором или турбиной. В частности, электрическая вращающаяся машина может работать с мощностью по меньшей мере 1 МВт и скоростью вращения по меньшей мере 5000 об/мин.
Возникающее за счет выделения тепла, в частности ротора, при работе электрической вращающейся машины тепловое расширение при такой проверке связности не представляет проблем, поскольку тепловое расширение по меньшей мере по существу происходит равномерно в радиальном направлении, и не выполняется сравнение абсолютных значений, а датчики рассматриваются относительно друг друга. Таким образом, значительно уменьшается вероятность неправильной тревоги.
С помощью управляющего блока осуществляется управление ходом выполнения способа для проверки связности данных датчиков. Средства для выполнения такого способа содержат компьютерную программу и, например, микроконтроллер или другой программируемый логический блок. Управляющий блок расположен, например, в сенсорном устройстве.
За счет комбинированной оценки обеих сенсорных осей обеспечивается возможность контролирования датчиков без дополнительной сенсорной техники. Поэтому обеспечивается выполнение проверки связности данных датчиков экономично и эффективно.
В одном предпочтительном варианте выполнения за счет сравнения расстояний первой пары датчиков и за счет сравнения расстояний второй пары датчиков проверяется, установилось ли регулирование. За счет проверки, находится ли регулирование в стабильном состоянии, уменьшается количество источников ошибок для проверки связности, так что дополнительно уменьшается вероятность неправильной тревоги.
В одном предпочтительном варианте выполнения при установившемся регулировании сравнивается первое расстояние первого датчика и/или второе расстояние второго датчика с третьим расстоянием третьего датчика и/или с четвертым расстоянием четвертого датчика, при этом, как только разница расстояний превышает предельное значение, то выдается сигнал предупреждения. В частности, регулируется положение тела вращения с помощью магнитного подшипника так, что разница расстояний одной пары датчиков становится равной 0. В установившемся состоянии регулирования сравнивается по меньшей мере одно значение расстояния первой пары датчиков, которая согласована с первой сенсорной осью, по меньшей мере с одним значением расстояния второй пары датчиков, которая согласована со второй сенсорной осью. За счет такого комбинированного использования обеих сенсорных осей обеспечивается возможность контролирования датчиков без дополнительной сенсорной техники, так что обеспечивается возможность выполнения контролирования датчиков экономично и эффективно.
Особенно предпочтительно, датчики выполнены в виде индуктивных датчиков сдвига, с помощью которых бесконтактно измеряются расстояния. Индуктивный датчик сдвига называется также датчиком вихревого тока. Такие датчики являются очень точными, дешевыми и надежными.
В другом предпочтительном варианте выполнения вторая пара диаметрально противоположно лежащих датчиков повернута на угол от 60° до 120° относительно первой пары диаметрально противоположно лежащих датчиков. За счет такого расположения сенсорных осей облегчается оценка измерений.
Особенно предпочтительно, тело вращения имеет по меньшей мере по существу круговое поперечное сечение. За счет кругового поперечного сечения получаются, в частности, при больших скоростях вращения, например, по меньшей мере 5000 об/мин, оптимальные свойства вращения. Кроме того, облегчается оценка измерений, поскольку расстояние до датчика при круглом поперечном сечении не изменяется во время вращения.
В другом предпочтительном варианте выполнения в зоне одного из датчиков расположен по меньшей мере один избыточный датчик, при этом определяется расстояние по меньшей мере одного избыточного датчика до тела вращения. С помощью по меньшей мере одного избыточного датчика обеспечивается возможность, помимо определения несвязности сенсорной техники, обнаружения неисправного датчика.
Особенно предпочтительно, неисправный датчик обнаруживается посредством сравнения определяемых расстояний. Поскольку для датчиков рассматриваемой оси и для наиболее близкого избыточного датчика справедливы относительно расстояния до тела вращения по существу идентичные рамочные условия, то с помощью сравнения расстояний наиболее близких друг к другу датчиков обеспечивается возможность распознавания, в частности, оси с неисправным датчиком, и посредством переключения регулирования с соседнего избыточному датчику датчика на избыточный датчик обеспечивается возможность обнаружения самого неисправного датчика. За счет такой опосредованной идентификации неисправного датчика без дополнительных измерений уменьшается время простоя электрической вращающейся машины и тем самым улучшается доступность машины.
Ниже приводится более подробное описание и более подробное пояснение изобретения на основе примеров выполнения со ссылками на прилагаемые чертежи, на которых изображено:
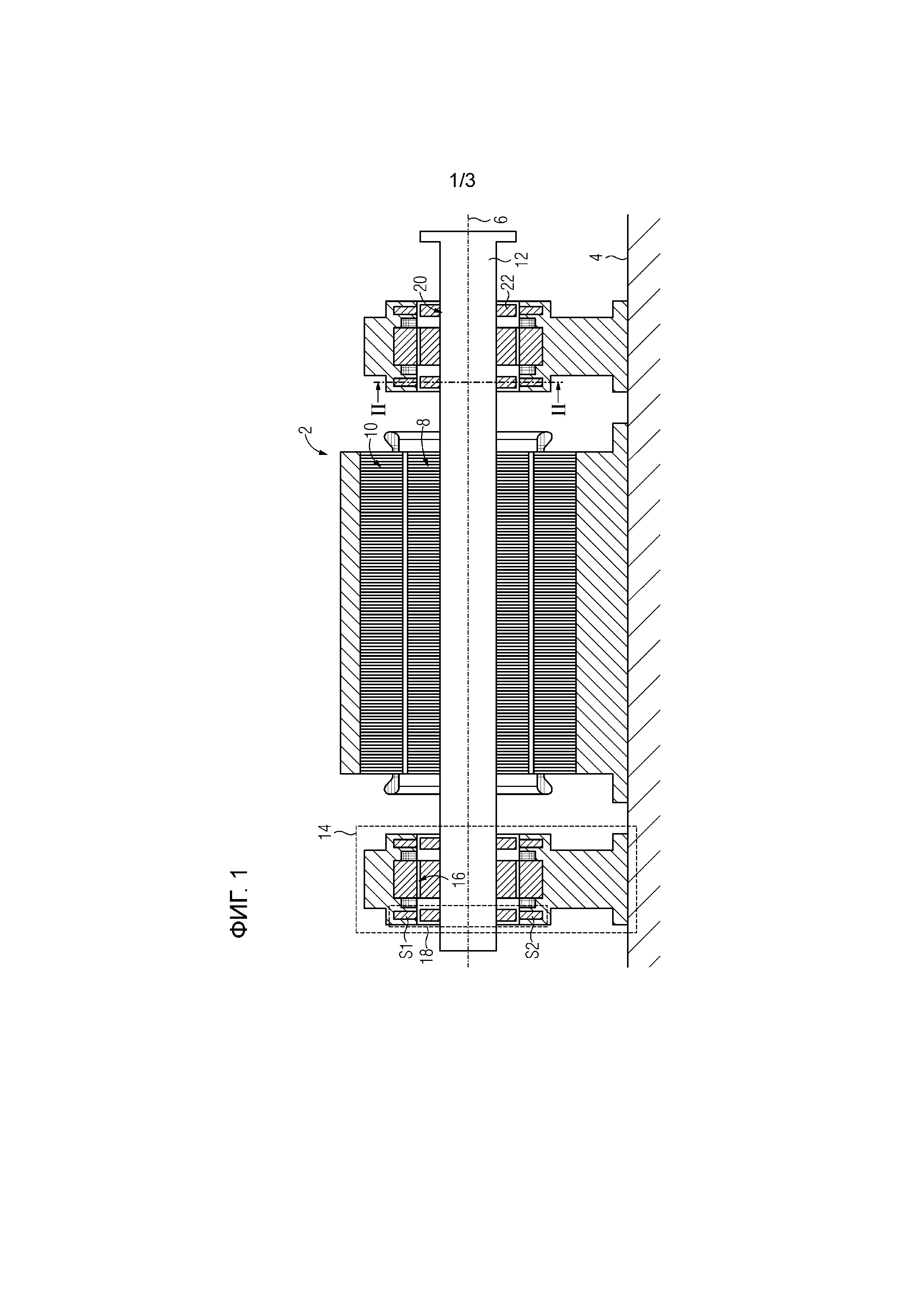
фиг. 1 - продольный разрез электрической вращающейся машины;
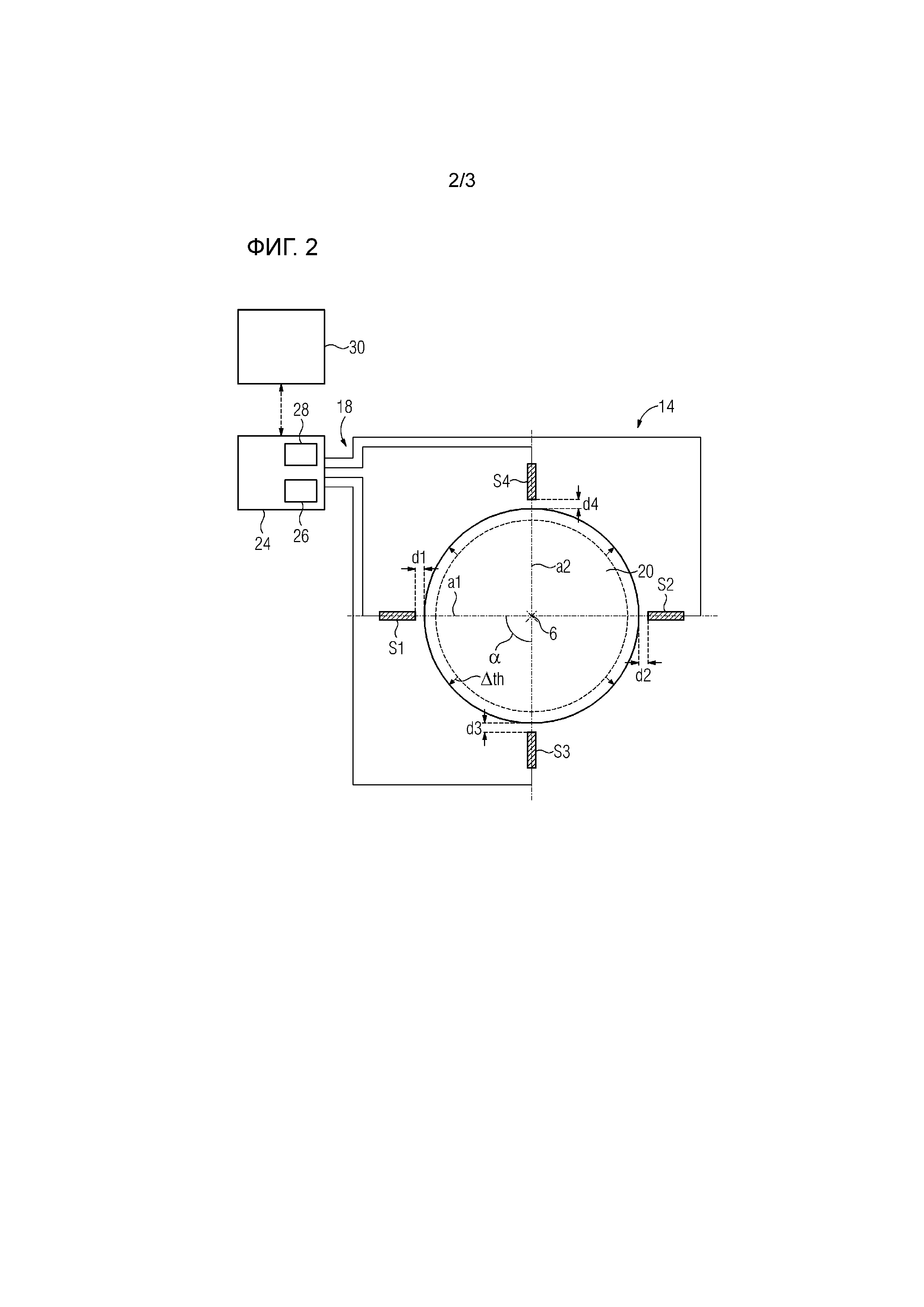
фиг. 2 - поперечный разрез устройства магнитного подшипника с первым вариантом выполнения сенсорного устройства; и
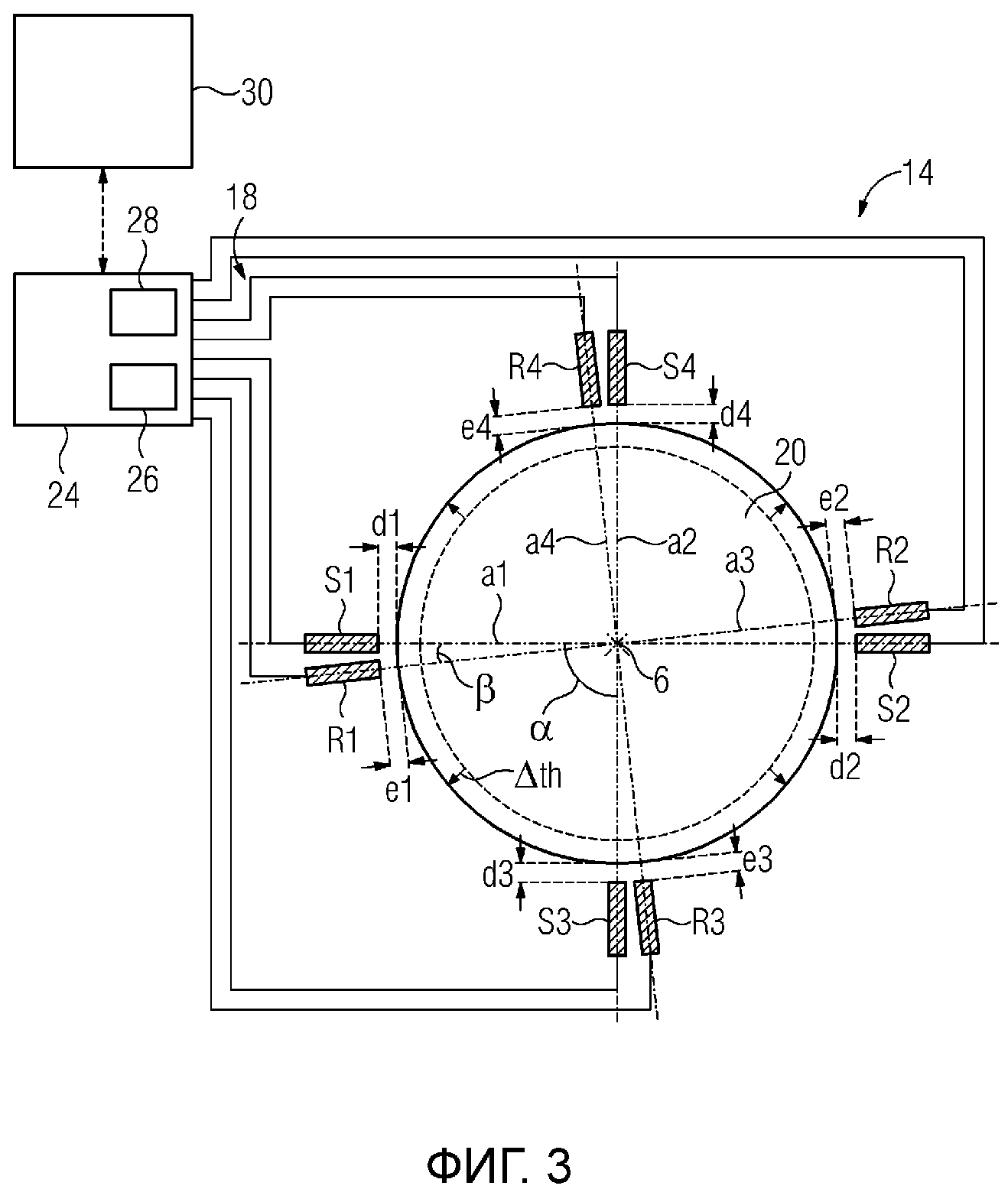
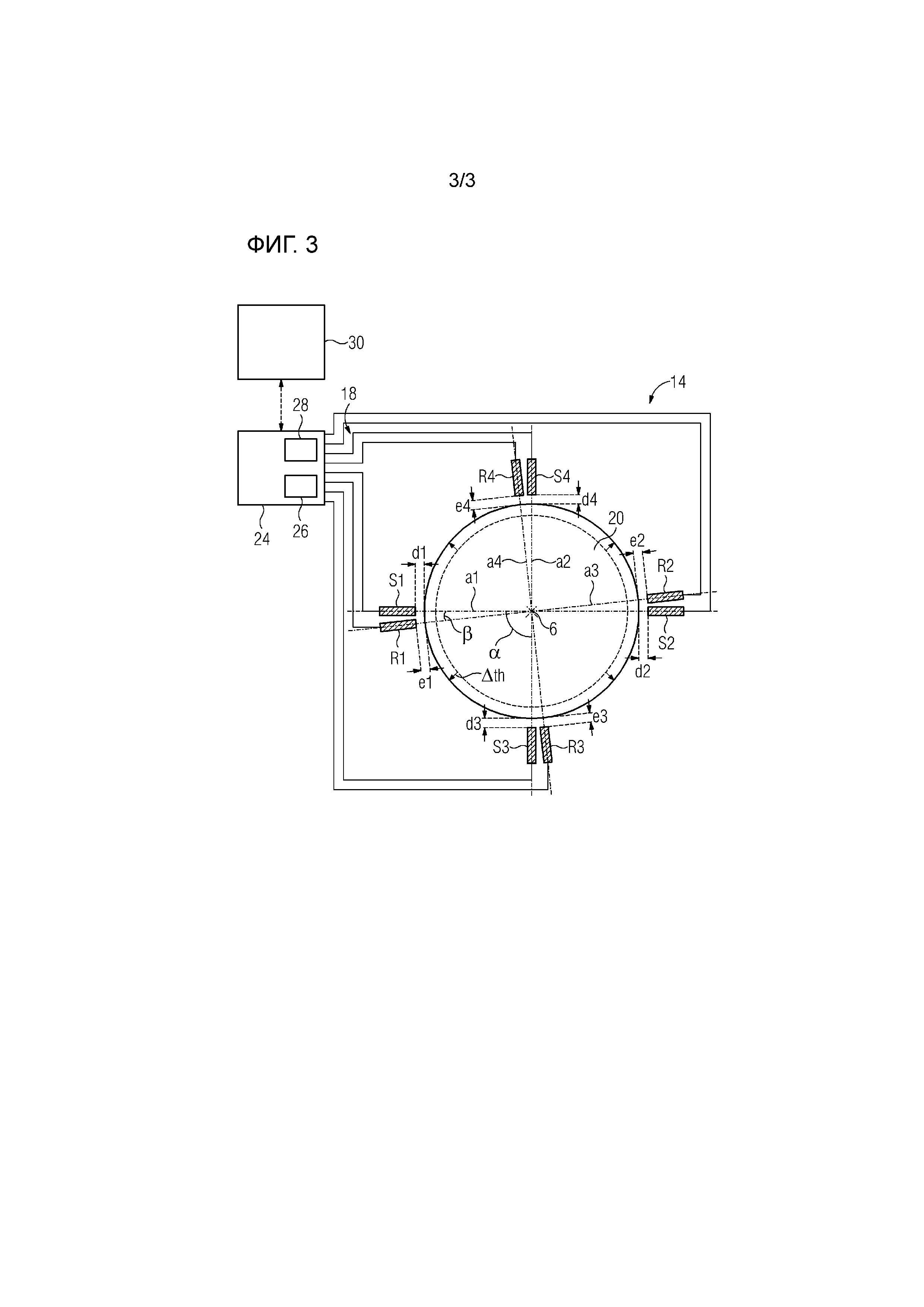
фиг. 3 - поперечный разрез устройства магнитного подшипника со вторым вариантом выполнения сенсорного устройства.
На фиг. 1 показана электрическая вращающаяся машина 2, которая стоит на фундаменте 4. Электрическая вращающаяся машина 2 выполнена в виде двигателя или в виде генератора и имеет вращающийся вокруг оси 6 вращения ротор 8 и окружающий ротор 8 статор 10. Вал 12 ротора 8 опирается бесконтактно на обоих осевых концах с помощью соответствующего активного устройства 14 магнитного подшипника. В качестве альтернативного решения, электрическая вращающаяся машина 2 выполнена в виде компрессора или турбины с валом 12, которая опирается бесконтактно на обоих осевых концах с помощью соответствующего активного устройства 14 магнитного подшипника.
С помощью сенсорного устройства 18 определяется положение тела 20 вращения, при этом тело 20 вращения содержит ротор 8 с валом 12. Не обязательно, тело 20 вращения имеет в зоне сенсорного устройства 18 сенсорное кольцо 22, которое соединено с валом 12. Например, сенсорное кольцо 12 соединено с валом 12 с силовым замыканием или запрессовано в горячем состоянии на валу 12. Тело 20 вращения имеет по меньшей мере по существу круглое поперечное сечение.
Сенсорное устройство содержит расположенные вокруг окружности вала 12 датчики S1, S2, которые выполнены в виде индуктивных датчиков сдвига и пригодны для бесконтактного измерения расстояний тела 20 вращения до соответствующих датчиков S1, S2. Индуктивные датчики сдвига используются, например, для измерения через воздушный зазор полного сопротивления и предпочтительно изменения полного сопротивления.
Устройство 14 магнитного подшипника выполнено в качестве примера в виде радиального подшипника. Применение сенсорного устройства 18 для осевого подшипника также является предметом патентной заявки, при этом в случае осевого подшипника сенсорное устройство 18 предусмотрено для определения положения тела 20 вращения в осевом направлении.
На фиг. 2 показан поперечный разрез устройства 14 магнитного подшипника с первым вариантом выполнения сенсорного устройства 18, при этом тело 20 вращения бесконтактно опирается с помощью устройства 14 магнитного подшипника. Сенсорное устройство 18 содержит две пары лежащих диаметрально противоположно датчиков S1, S2, S3, S4, которые образуют соответствующую одну ось а1, а2, при этом вторая ось а2 второй пары S3, S4 расположена с поворотом на угол α в диапазоне 90° относительно первой оси а1 первой пары S1, S2. Датчики S1, S2, S3, S4 соединены с центральным блоком 24, который содержит обрабатывающий блок 26 и управляющий блок 28. Передача измеренных данных датчиков в центральный блок 24 осуществляется, например, электрически, в частности через кабель, или оптически через световод. Датчики S1, S2, S3, S4 выполнены в виде индуктивных датчиков сдвига, с помощью которых бесконтактно измеряются расстояния d1, d2, d3, d4 соответствующих датчиков S1, S2, S3, S4 до тела 20 вращения. Определяемые данные переводятся в цифровую форму и по меньшей мере частично передаются в инфраструктуру 30 с информационной сетью. Инфраструктура 30 с информационной сетью является, например, по меньшей мере одной локальной компьютерной системой или облаком и обеспечивает память, вычислительную мощность и прикладное программное обеспечение. В облаке память, вычислительную мощность и прикладное программное обеспечение предоставляются в распоряжение в качестве услуги через интернет. Цифровая передача данных в инфраструктуру 30 с информационной сетью происходит без проводов, по проводам или оптически.
Например, данные передаются с помощью Bluetooth или WLAN.
Пары датчиков S1, S2, S3, S4 соответствующих осей а1, а2 имеют различные регуляторы, которые для обеспечения наглядности не изображены на фиг. 2. Для регулирования используются измерительные значения положения датчиков S1, S2, S3, S4. Расстояния d1, d2, d3, d4 регулируются так, что d2-d1=0 и d4-d3=0. Датчики калибрируются так, что целевое положение соответствует нулевому сдвигу. Таким образом, после калибровки d1=d2=d3=d4.
Сначала посредством сравнения расстояний d1, d2 первой пары датчиков S1, S2, и посредством сравнения расстояний d3, d4 второй пары датчиков S3, S4 проверяется, установилось ли регулирование.
Если регулирование установилось, т.е. d1=d2 и d3=d4, то выполняется проверка связности данных датчиков обеих осей а1, а2: сравнивается первое расстояние d1 первого датчика S1, и/или второе расстояние d2 второго датчика S2 с третьим расстоянием d3 третьего датчика S3, и/или с четвертым расстоянием d4 четвертого датчика S4, при этом, как только различие расстояний d1, d2, d3, d4 превышает предельное значение, то выдается сигнал предупреждения. Поскольку d1=d2 и d3=d4, то достаточно одно из расстояний d1, d2 первой пары датчиков S1, S2 сравнивать с одним из расстояний d3, d4 второй пары датчиков S3, S4. В качестве альтернативного решения, сравниваются все расстояния d1, d2, d3, d4 на наличие d1=d2=d3=d4.
Во время работы происходит тепловое расширение ротора Δth, т.е. за счет нагревания ротора 8 увеличивается диаметр тела 20 вращения слегка, но равномерно. Однако тепловое расширение Δth ротора не является проблемой, поскольку сравниваются друг с другом расстояния d1, d2, d3, d4 датчиков S1, S2, S3, S4, и не осуществляется сравнение абсолютных значений. Возможно применение для осевого подшипника. В остальном выполнение устройства 14 магнитного подшипника на фиг. 2 соответствует выполнению на фиг. 1.
На фиг. 3 показан поперечный разрез устройства 14 магнитного подшипника со вторым вариантом выполнения сенсорного устройства 18. С датчиками S1, S2, S3, S4 согласован соответствующий избыточный датчик R1, R2, R3, R4, с целью, помимо определения с помощью несвязности сенсорной техники, также непосредственного обнаружения неисправного датчика. Избыточные датчики R1, R2, R3, R4 расположены диаметрально противоположно лежащими, при этом пары образуют соответствующую одну ось. Оси а3, а4 избыточных датчиков R1, R2, R3, R4 расположены с поворотом на угол β смещения в диапазоне до 10° относительно осей а1, а2 датчиков S1, S2, S3, S4. Для датчиков S1, S2, S3, S4 и их наиболее близких избыточных датчиков R1, R2, R3, R4 справедливы относительно расстояния до тела 20 вращения по существу идентичные рамочные условия.
Определяются расстояния е1, е2, е3, е4 избыточных датчиков R1, R2, R3, R4 до тела 20 вращения, при этом неисправный датчик S1, S2, S3, S4, R1, R2, R3, R4 обнаруживается посредством сравнения определяемых расстояний d1, d2, d3, d4, е1, е2, е3, е4. В остальном выполнение устройства 14 магнитного подшипника на фиг. 3 соответствует фиг. 2.
Таким образом, изобретение относится к способу контролирования устройства 14 магнитного подшипника. Для улучшения контролирования определения положения тела вращения в активном магнитном подшипнике предлагается, что устройство 14 магнитного подшипника имеет первую пару по существу лежащих диаметрально противоположно датчиков S1, S2 и вторую пару по меньшей мере по существу лежащих диаметрально противоположно датчиков S3, S4, которые расположены со смещением относительно первой пары датчиков S1, S2 на угол α, при этом соответствующее расстояние d1, d2, d3, d4 датчика S1, S2, S3, S4 до тела 20 вращения, которое расположено внутри пар датчиков S1, S2; S3, S4, определяется посредством усреднения во времени измерений расстояния, при этом расстояния d1, d2, d3, d4 сравниваются, при этом, как только различие расстояний d1, d2, d3, d4 превышает предельное значение, то выдается сигнал предупреждения.
Система защиты против тлеющего разряда, в частности внешняя система защиты против тлеющего разряда для электрической машины
Блок разъединителя, имеющий электромагнитный привод
Газоизолированный измерительный преобразователь, имеющий размыкающее устройство
Способ определения значения отклонения параметра работоспособности по меньшей мере одного компонента газовой турбины и блок управления для газовой турбины
Лопатка для турбомашины
Паровая турбина
Способ оплавления трещин
Симметрирующий трансформатор с жидкостным охлаждением
Ротор синхронной реактивной электрической машины

