Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ С РЧ-ШУМАМИ
Вид РИД
Изобретение
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к магнитно-резонансной томографии, в частности, к магнитно-резонансной томографии в присутствии побочных РЧ-сигналов.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В сканерах магнитно-резонансной томографии (МРТ) используется сильное статическое магнитное поле для выставления ядерных спинов атомов как части процедуры для создания изображений внутри тела пациента. Это сильное статическое магнитное поле называется полем B0 или главным магнитным полем.
Во время МРТ-сканирования радиочастотные (РЧ) импульсы, генерируемые с помощью передающей катушки, вызывают возмущения в локальном магнитном поле, и РЧ-сигналы, испускаемые ядерными спинами, обнаруживаются приемной катушкой. Эти РЧ-сигналы используются для создания МРТ-изображений. Эти катушки также могут называться антеннами. Кроме того, передающая и приемная катушки также могут быть интегрированы в одну приемопередающую катушку, которая выполняет обе функции. Подразумевается, что использование термина приемопередающая катушка также относится к системам, где используются отдельные передающая и приемная катушки. Переданное РЧ-поле называется полем B1.
Однако побочные РЧ-шумы во время МРТ-сканирования могут мешать измерению РЧ-сигналов, испускаемых ядерными спинами. Как правило, вокруг системы магнитно-резонансной томографии создается большая РЧ-клетка для устранения этих побочных РЧ-сигналов. Недостатком использования такой РЧ-клетки является то, что она использует большое количества металла, такого как медь, и ее дорого создавать.
Патент США 7,486,982 B2 раскрывает непрозрачный для радиоизлучения держатель в комбинации с непрозрачным для радиоизлучения магнитными компонентами для формирования защитного РЧ-экрана вокруг пациента, подвергающегося процедуре ядерного магнитного резонанса (ЯМР).
JPS63272336A раскрывает два набора катушек для регистрации внешних радиоволн, которые располагаются вблизи катушки регистрации МР-сигнала, но по практически не выполняют прием МР-сигнала от испытуемого. Эффект внешней радиоволны устраняется путем прямого вычитания принятого сигнала катушек для регистрации внешних радиоволн из принятого сигнала катушки для регистрации МР-сигнала. Подразумевается, что катушки для регистрации внешних радиоволн должны быть аккуратно размещены относительно катушки для регистрации сигнала, чтобы гарантировать эффект подавления шумов. Международная заявка WO2013/016639 раскрывает систему активного подавления шумов в портативной МР-системе, которая вычисляет универсальный комплексный масштабирующий коэффициент и определяет передаточную функцию между случайными помехами от окружающей среды и измеренным сигналом от приемной катушки, которая полностью включена в настоящее описание по ссылки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей этого изобретения является обеспечение экономически выгодного подхода к подавлению шумов с наименьшими возможными модификациями аппаратного обеспечения систем магнитно-резонансной томографии на рынке. Между тем подход к подавлению шумов учитывает эволюцию во времени и пространстве шумов для улучшения точности корректировки томографических магнитно-резонансных данных.
Варианты осуществления изобретения обеспечивают систему магнитно-резонансной томографии, способ и компьютерный программный продукт в независимых пунктах формулы изобретения. Варианты осуществления даются в зависимых пунктах формулы изобретения.
Как будет очевидно специалисту в области техники, аспекты настоящего изобретения могут быть воплощены как устройство, способ или компьютерный программный продукт. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта осуществления, комбинирующего программный и аппаратный аспекты, все из которых, в общем, могут упоминаться в настоящем описании как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного на одной или более машиночитаемых средах, имеющих исполняемый компьютером код, воплощенный на них.
Может использоваться любая комбинация одной или более машиночитаемых сред. Машиночитаемая среда может быть машиночитаемой сигнальной средой или машиночитаемой средой хранения данных. «Машиночитаемая среда хранения данных» в настоящем описании охватывает любую материальную среду хранения данных, которая может хранить инструкции, которые могут исполняться процессором вычислительного устройства. Машиночитаемая среда хранения данных может называться машиночитаемой невременной средой хранения данных. Машиночитаемая среда хранения данных также может называться материальной машиночитаемой средой. В некоторых вариантах осуществления машиночитаемая среда хранения данных также может хранить данные, к которым может получить доступ процессор вычислительного устройства. Примеры машиночитаемых сред хранения данных включают в себя, но не ограничиваются только этим: гибкий диск, привод магнитного жесткого диска, твердотельный жесткий диск, флэш-память, USB карта флэш-памяти, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и массив регистров процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и цифровые универсальные диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин машиночитаемая среда хранения данных также относится к различным типам носителей записи, к которым может получить доступ компьютерное устройством через сеть или линию связи. Например, данные могут быть получены через модем, по Интернету или по локальной сети. Исполняемый компьютером код, воплощенный на машиночитаемой среде, может быть передан с использованием любой подходящей среды, в том числе, но не ограничиваясь только этим, беспроводной связи, проводной линии, волоконно-оптического кабеля, РЧ и т.д. или любой подходящей комбинации приведенного выше.
Машиночитаемая сигнальная среда может включать в себя распространяющийся сигнал данных с исполняемым компьютером кодом, воплощенным в нем, например, в основной полосе частот или в качестве части несущей волны. Такой распространяющийся сигнал может принимать любую из множества форм, в том числе, но не ограничиваясь только этим, электромагнитную, оптическую или их любую подходящую комбинацию. Машиночитаемая сигнальная среда может быть любой машиночитаемой средой, которая не является машиночитаемой средой хранения данных и которая может осуществлять связь, распространяться или передавать программу для использования системой или устройством исполнения инструкций или применительно к системе, аппарату или устройству исполнения инструкций.
«Компьютерная память» или «память» являются примером машиночитаемой среды хранения данных. Память компьютера является любой памятью, которая непосредственно доступна процессору. «Запоминающее устройство компьютера» или «запоминающее устройство» являются еще одним примером машиночитаемой среды хранения данных. Запоминающим устройством компьютера является любая энергонезависимая машиночитаемая среда хранения данных. В некоторых вариантах осуществления запоминающее устройство компьютера может также быть памятью компьютера или наоборот. Содержание памяти и запоминающего устройства могут копировать друг друга, или элементы, изображенные находящимися в одном, могут храниться или иметь копию в другом.
«Процессор» в настоящем описании охватывает электронный компонент, который имеет возможность исполнять программу или исполняемую машиной инструкцию или исполняемый компьютером код. Ссылки на вычислительное устройство, содержащее «процессор», должны интерпретироваться как возможно содержащие более чем один процессор или процессорное ядро. Процессор может быть, например, многоядерным процессором. Процессором также может называться набор процессоров в пределах одной компьютерной системы или распределенный между несколькими компьютерными системами. Термин вычислительное устройство также должен интерпретироваться как возможно относящийся к набору или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Исполняемый компьютером код может исполняться несколькими процессорами, которые могут быть в пределах одного и того же вычислительного устройства или которые могут быть даже распределены между несколькими вычислительными устройствами.
Исполняемый компьютером код может содержать исполняемые машинной инструкции или программу, которая заставляет процессор выполнять аспект настоящего изобретения. Исполняемый компьютером код для выполнения операций для аспектов настоящего изобретения может быть записан в любой комбинации из одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ и т.п. и традиционные языки процедурного программирования, такие как язык программирования «C» или аналогичные языки программирования, и скомпилирован в исполняемые машиной инструкции. В некоторых случаях исполняемый компьютером код может быть в форме высокоуровневого языка или в предварительно скомпилированной форме и использоваться в сочетании с интерпретатором, который генерирует исполняемые машиной инструкции «на лету».
Исполняемый компьютером код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с компьютером пользователя через любой тип сети, в том числе локальную сеть (LAN) или глобальную сеть (WAN), или может быть сделано подсоединение к внешнему компьютеру (например, через Интернет с использованием Интернет-провайдера).
Аспекты настоящего изобретения описываются со ссылкой на изображения блок-схем последовательности операций и/или блок-схем способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Следует иметь в виду, что каждый блок или часть блоков изображений блок-схем последовательности операций и/или блок-схем могут быть реализованы с помощью инструкций компьютерной программы в форме исполняемого компьютером кода, когда это необходимо. Кроме того, следует иметь в виду, что если они не являются взаимно исключающими, комбинации блоков в различных блок-схемах последовательности операций, иллюстрациях и/или блок-схемах могут быть объединены. Эти инструкции компьютерной программы могут быть выданы процессору универсального компьютера, специализированного компьютера или другого программируемого устройства обработки данных для создания машины, так что инструкции, которые исполняются с помощью процессора компьютера или другого программируемого устройства обработки данных, создают средство для реализации функций/действий, указанных в блоке или блоках блок-схемы последовательности операций и/или блок-схемы.
Эти инструкции компьютерной программы также могут храниться в машиночитаемой среде, которые могут давать указание компьютеру, другому программируемому устройству обработки данных или другим устройствам функционировать конкретным образом, так что инструкции, сохраненные в машиночитаемой среде, создают изделие, включающее в себя инструкции, которые реализуют функцию/действие, определенное в блоке или блоках блок-схемы последовательности операций и/или блок-схемы.
Инструкции компьютерной программы также могут быть загружены на компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы вызвать выполнение на компьютере, другом программируемом устройстве или других устройствах последовательности операционных этапов для создания реализованного на компьютере процесса, так что инструкции, которые исполняются на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, определенных в блоке или блоках блок-схемы последовательности операций и/или блок-схемы.
«Пользовательский интерфейс» в настоящем описании является интерфейсом, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» может также называться «человеко-машинным интерфейсом». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать прием входных данных от оператора компьютером и может обеспечивать выходные данные от компьютера для пользователя. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, а интерфейс может позволять компьютеру показывать эффекты управления или манипуляции оператора. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных через клавиатуру, мышь, шаровой манипулятор, сенсорную панель, ручку координатно-указательного устройства, графический планшет, джойстик, веб-камеру, гарнитуру, педали, проводную перчатку, дистанционное управление и акселерометр - это все примеры компонентов пользовательского интерфейса, которые обеспечивают прием информации или данных от оператора.
«Аппаратный интерфейс» в настоящем описании охватывает интерфейс, который позволяет процессору компьютерной системы взаимодействовать и/или управлять внешним вычислительным устройством и/или аппаратом. Аппаратный интерфейс может позволять процессору отправлять управляющие сигналы или инструкции внешнему вычислительному устройству и/или аппарату. Аппаратный интерфейс также может позволить процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры аппаратного интерфейса включают в себя, но не ограничиваются только этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE 488, соединение Bluetooth, соединение по беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, MIDI-интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
«Дисплей» или «устройство отображения» в настоящем описании охватывают устройство вывода или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, аудио и или тактильные данные. Примеры дисплея включают в себя, но не ограничиваются только этим: компьютерный монитор, телевизионный экран, сенсорный экран, сенсорный электронный дисплей, экран Брайля, электронно-лучевую трубку (CRT), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный флюоресцирующий дисплей (VF), светодиодные (LED) дисплеи, электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светодиодах (OLED), проектор и видеошлем.
Магнитно-резонансные (МР) данные определяются в настоящем описании как записанные антенной магнитно-резонансного устройства измерения радиочастотных сигналов, испускаемых атомными спинами, во время сканирования магнитно-резонансной томографии. Магнитно-резонансные данные являются примером данных медицинского изображения. Изображение магнитно-резонансной томографии (МРТ) определяется в настоящем описании как реконструированная двумерная или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной томографии. Эта визуализация может быть выполнена с использованием компьютера. Магнитно-резонансные данные также могут называться данными k-пространства. K-пространство является формализмом, широко используемым в магнитно-резонансной томографии. В физике МРТ k-пространство является 2D- или 3D-преобразованием Фурье измеренного МР-изображения. На практике K-пространством часто называют временное пространство изображения, обычно матрицу комплексных величин, в которой данные от оцифрованных МР-сигналов хранятся во время сбора данных.
Варианты осуществления настоящего изобретения обеспечивают способ подавления шумов окружающей среды системы магнитно-резонансной томографии (МРТ), которая включает в себя приемную антенну. Способ содержит получение магнитно-резонансных (МР) данных, включающих в себя компонент РЧ-шумов, с помощью приемной антенны, получение данных РЧ-шумов, указывающих шумы окружающей среды системы МРТ, вычисление коэффициента компенсации на основании данных РЧ-шумов и части МР-данных в периферийном участке k-пространства, хранящего МР-данные, оценку компонента РЧ-шумов в МР-данных как произведение данных РЧ-шумов и вычисленного коэффициента компенсации и генерацию скорректированных МР-данных путем вычитания оцененного компонента РЧ-шумов из МР-данных. Преимущественно, путем учета характеристик распределения компонента РЧ-шумов в k-пространстве МР-данных для вычисления коэффициента компенсации используется периферийный участок k-пространства, где компонент РЧ-шумов доминирует. Таким образом, может быть достигнуто подавление шумов с наименьшей возможной модификацией аппаратного обеспечения системы, в то время как шумы подавляются более точно.
В соответствии с одним вариантом осуществления настоящего изобретения данные РЧ-шумов получают с помощью катушки сниффера, расположенной вне объема визуализации системы МРТ. Преимущественно, катушка сниффера может измерять в основном шумы окружающей среды для получения более точных данных РЧ-шумов.
В соответствии с одним вариантом осуществления настоящего изобретения катушка сниффера является стандартной приемной антенной, расположенной вне объема визуализации в качестве катушки сниффера, и данные РЧ-шумов получают с помощью стандартной приемной антенны одновременно со сбором МР-данных через приемную антенну, расположенную в пределах объема визуализации. Преимущественно, запасная стандартная приемная антенна в нише может непосредственно повторно использоваться в качестве катушки сниффера, что экономит затраты и усилия по проектированию заданной катушки сниффера, предназначенной для измерения данных РЧ-шумов. Кроме того, также устраняется необходимость модификации системы магнитно-резонансной томографии, чтобы сделать ее совместимой со специализированной катушкой сниффера. Между тем, использование стандартной приемной антенны в качестве катушки сниффера также делает одновременный сбор МР-данных и данных РЧ-шумов более простым по сравнению с использованием специализированной катушки сниффера.
В соответствии с одним вариантом осуществления настоящего изобретения приемная антенна формируется как многоканальный массив катушек, при этом данные РЧ-шумов получают с помощью модуля виртуального сниффера, реализованного с помощью процессора, для извлечения данных РЧ-шумов из МР-данных, полученных с помощью многоканального массива катушек. Преимущественно, путем извлечения данных РЧ-шумов из МР-данных, полученных с помощью многоканального массива катушек, стоимость подавления шумов дополнительно уменьшается, так как не задействовано никакое аппаратное обеспечение.
В соответствии с одним вариантом осуществления настоящего изобретения данные РЧ-шумов извлекают из МР-данных, полученных с помощью многоканального массива катушек, с использованием статистического алгоритма, выбранного из группы, состоящей из анализа главных компонентов (PCA) и анализа независимых компонентов (ICA). Преимущественно, статистический алгоритм может быть исполнен с помощью компьютерного программного продукта для экономии затрат.
В соответствии с одним вариантом осуществления настоящего изобретения вычисление коэффициента компенсации, дополнительно содержит выставление линий данных k-пространства, хранящего МР-данные, с линиями данных k-пространства, хранящего данные РЧ-шумов, при этом выставленные линии данных имеют одинаковое k-значение в фазокодирующем направлении, и вычисление коэффициента компенсации на основании МР-данных из линий данных вблизи наибольших/наименьших k-значений в фазокодирующем направлении соответствующего k-пространства и данных РЧ-шумов из линий данных вблизи наибольших/наименьших k-значений в фазокодирующем направлении соответствующего k-пространства, при этом МР-данные из линий данных вблизи наибольших/наименьших k-значений являются произведением коэффициента компенсации и данных РЧ-шумов из линий данных вблизи наибольших/наименьших k-значений. Преимущественно, коэффициент компенсации может быть вычислен для каждого выставленного фазокодирующего градиента для учета эволюции во времени шумов окружающей среды в каждый период приема МР-данных.
В соответствии с одним вариантом осуществления настоящего изобретения вычисление коэффициента компенсации дополнительно содержит выставление линий данных k-пространства, хранящего МР-данные, с линиями данных k-пространства, хранящего данные РЧ-шумов, при этом выставленные линии данных имеют одинаковое k-значение в фазокодирующем направлении, и вычисление коэффициента компенсации на основании МР-данных вблизи наибольших/наименьших k-значений в частотно-кодирующем направлении для линий данных в центре фазокодирующего направления соответствующего k-пространства и данных РЧ-шумов вблизи наибольших/наименьших k-значений в частотно-кодирующем направлении для линий данных в центре фазокодирующего направления соответствующего k-пространства, при этом МР-данные вблизи наибольших/наименьших k-значений являются произведением коэффициента компенсации и данных РЧ-шумов вблизи наибольших/наименьших k-значений. Преимущественно, коэффициент компенсации может быть вычислен для каждого выставленного фазокодирующего градиента для учета эволюции во времени шумов окружающей среды в каждый период приема МР-данных.
В соответствии с одним вариантом осуществления настоящего изобретения вычисление коэффициента компенсации дополнительно содержит выставление линий данных k-пространства, хранящего МР-данные, с линиями данных k-пространства, хранящего данные РЧ-шумов, при этом выставленные линии данных имеют одинаковое k-значение в фазокодирующем направлении, и вычисление коэффициента компенсации на основании МР-данных вблизи наибольших/наименьших k-значений в частотно-кодирующем направлении соответствующего k-пространства и данных РЧ-шумов вблизи наибольших/наименьших k-значений в частотно-кодирующем направлении соответствующего k-пространства, при этом МР-данные вблизи наибольших/наименьших k-значений являются произведением коэффициента компенсации и данных РЧ-шумов вблизи наибольших/наименьших k-значений. Преимущественно, коэффициент компенсации может быть вычислен для каждого выставленного фазокодирующего градиента для учета эволюции во времени шумов окружающей среды в каждый период приема МР-данных.
Варианты осуществления настоящего изобретения обеспечивают систему магнитно-резонансной томографии, выполненную с возможностью подавления шумов МР-данных, полученных с помощью приемной антенны МРТ. Система МРТ содержит модуль сбора данных, выполненный с возможностью получения данных РЧ-шумов, указывающих шумы окружающей среды системы МРТ, и МР-данных, полученных с помощью приемной антенны, модуль вычисления коэффициента компенсации, выполненный с возможностью вычисления коэффициента компенсации на основании данных РЧ-шумов и части МР-данных в периферийном участке k-пространства, хранящего МР-данные, модуль оценки шумов, выполненный с возможностью оценки компонента РЧ-шумов в МР-данных как произведения данных РЧ-шумов и вычисленного коэффициента компенсации, и модуль коррекции данных, выполненный с возможностью генерации скорректированных МР-данных путем вычитания оцененного компонента РЧ-шумов из МР-данных. Преимущественно, путем учета характеристик распределения компонента РЧ-шумов в k-пространстве МР-данных для вычисления коэффициента компенсации используется периферийный участок k-пространства, где компонент РЧ-шумов доминирует. Таким образом, может быть достигнуто подавление шумов с наименьшей возможной модификацией аппаратного обеспечения системы, в то время как шумы подавляются более точно.
В соответствии с одним вариантом осуществления настоящего изобретения коэффициент компенсации является 1-мерным комплексным вектором для каждого канала многоканального массива катушек, и число векторных элементов равно числу фазокодирующих градиентов для коррекции томографических магнитно-резонансные данных, полученных во время каждого периода приема, на основании различных векторных элементов.
Варианты осуществления настоящего изобретения обеспечивают компьютерный программный продукт, содержащий исполняемые машиной инструкции для исполнения процессором, управляющим системой магнитно-резонансной томографии. Исполнение исполняемых машиной инструкций заставляет процессор: получать данные РЧ-шумов, указывающие шумы окружающей среды системы МРТ, и МР-данные, полученные с помощью приемной антенны, вычислять коэффициент компенсации на основании данные РЧ-шумов и части МР-данных в периферийном участке k-пространства, хранящего МР-данные, оценивать компонент РЧ-шумов в МР-данных как произведение данных РЧ-шумов и вычисленного коэффициента компенсации и генерировать скорректированные МР-данные путем вычитания оцененного компонента РЧ-шумов из МР-данных. Преимущественно, путем учета характеристик распределения компонента РЧ-шумов в k-пространстве МР-данных для вычисления коэффициента компенсации используется периферийный участок k-пространства, где компонент РЧ-шумов доминирует. Таким образом, может быть достигнуто подавление шумов с наименьшей возможной модификацией аппаратного обеспечения системы, в то время как шумы подавляются более точно.
Различные аспекты и признаки раскрытия описываются более подробно ниже. Другие задачи и преимущества настоящего изобретения станут более очевидны и будут легко поняты со ссылкой на описание, сделанное в сочетании с прилагаемыми чертежами.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее настоящее изобретение будет описано и объяснено более подробно в комбинации с вариантами осуществления и со ссылкой на чертежи, на которых:
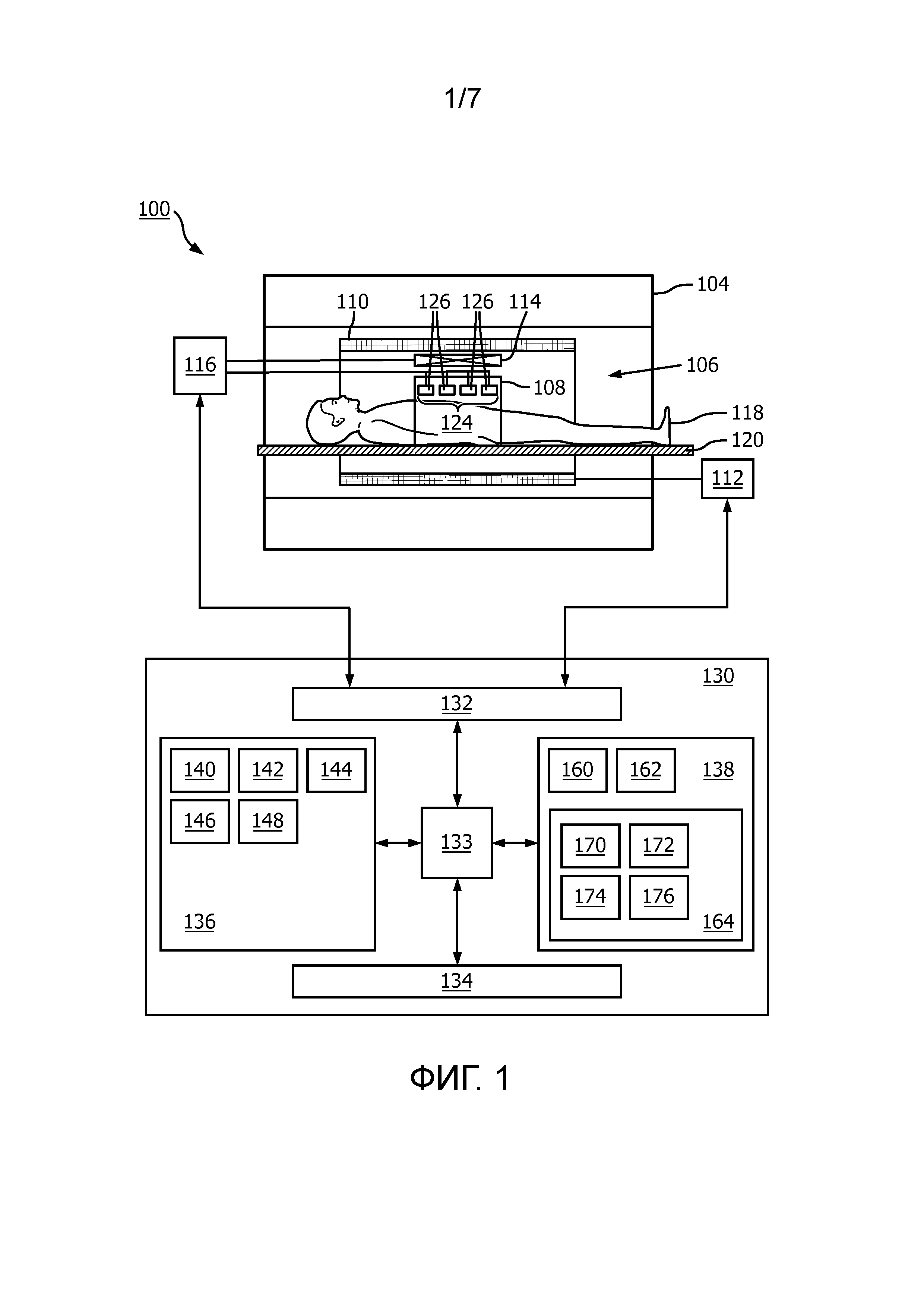
фиг. 1 изображает систему магнитно-резонансной томографии в соответствии с одним вариантом осуществления настоящего изобретения;
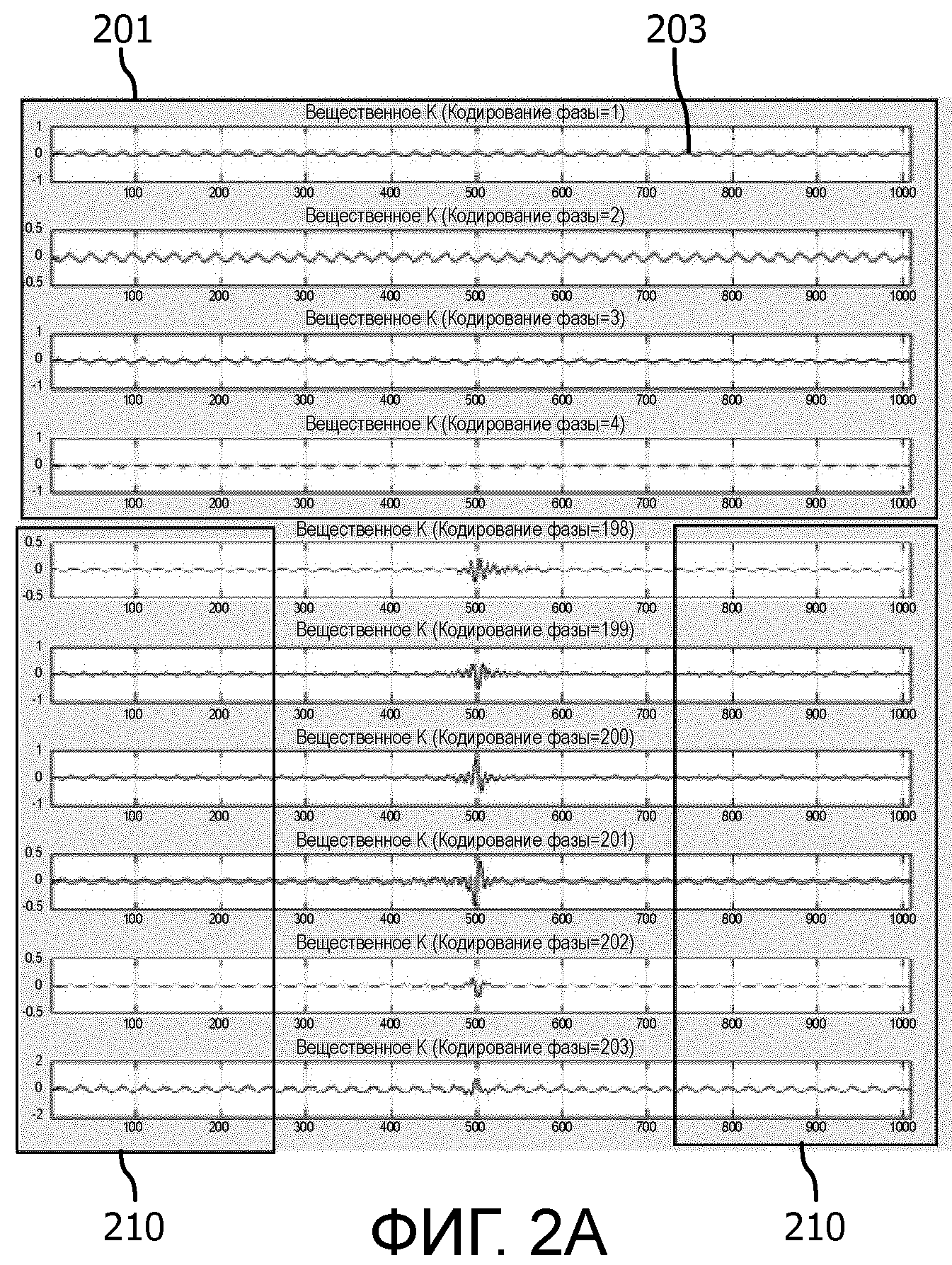
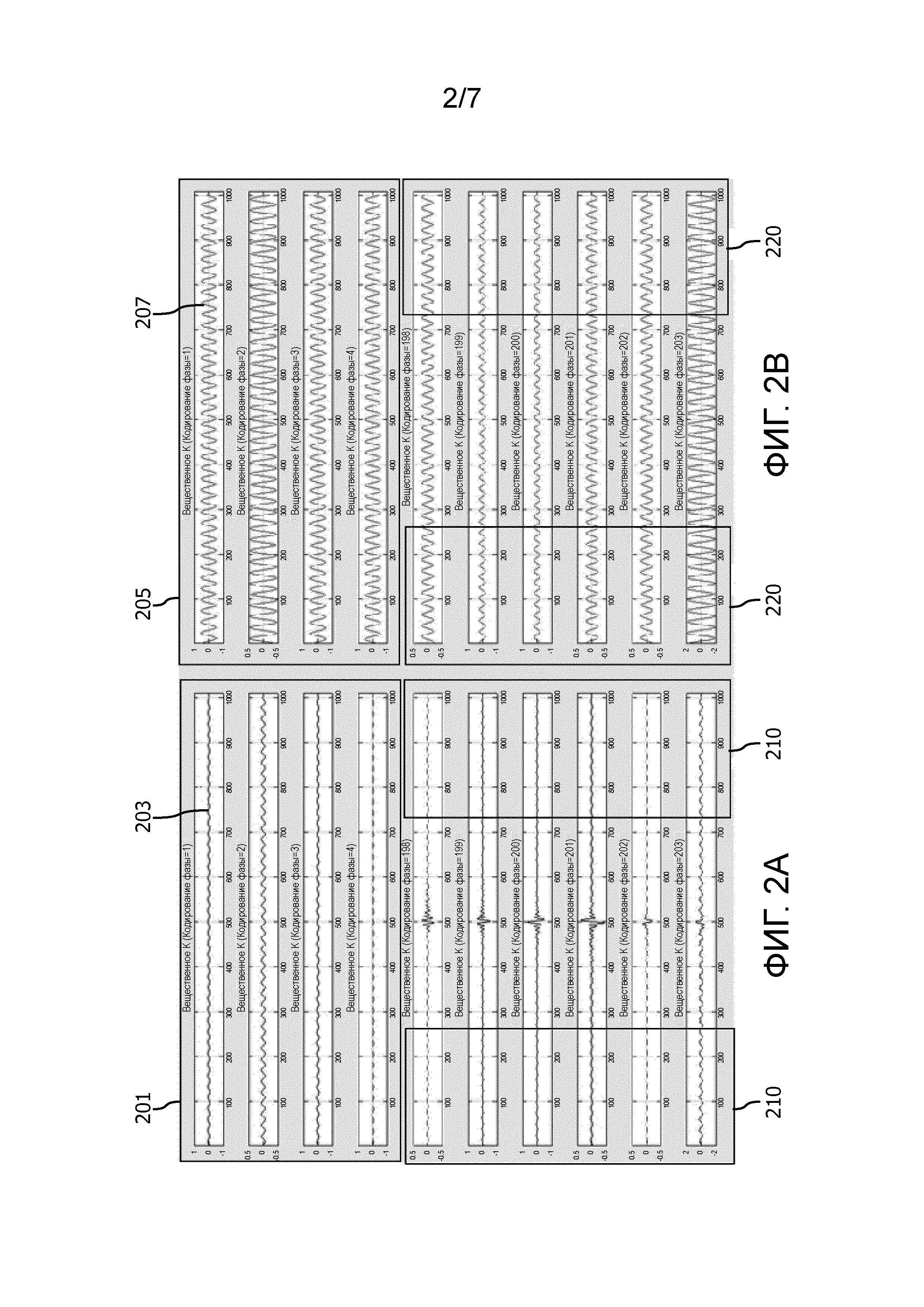
фиг. 2a изображает периферийные участки представления k-пространства, которое содержит данные изображения и данные РЧ-шумов, полученные из одного магнитно-резонансного сканирования, в соответствии с одним вариантом осуществления настоящего изобретения;
фиг. 2b изображает периферийные участки представления k-пространства, которое содержит только данные РЧ-шумов, в соответствии с одним вариантом осуществления настоящего изобретения;
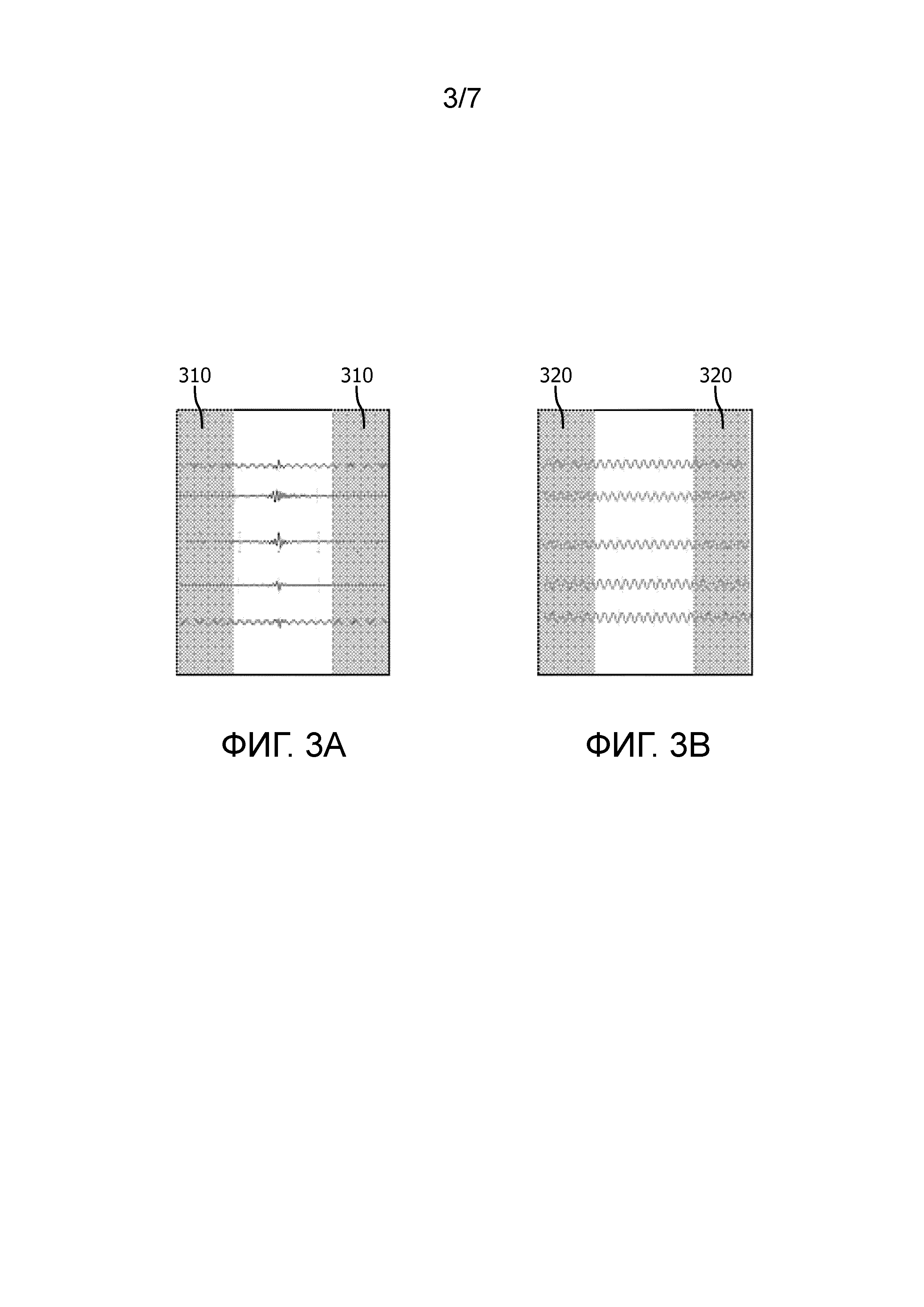
фиг. 3a изображает периферийные участки представления k-пространства, которое содержит данные изображения и данные РЧ-шумов, полученные из одного магнитно-резонансного сканирования, в соответствии с другим вариантом осуществления настоящего изобретения;
фиг. 3b изображает периферийные участки представления k-пространства, которое содержит только данные РЧ-шумов, в соответствии с другим вариантом осуществления настоящего изобретения;
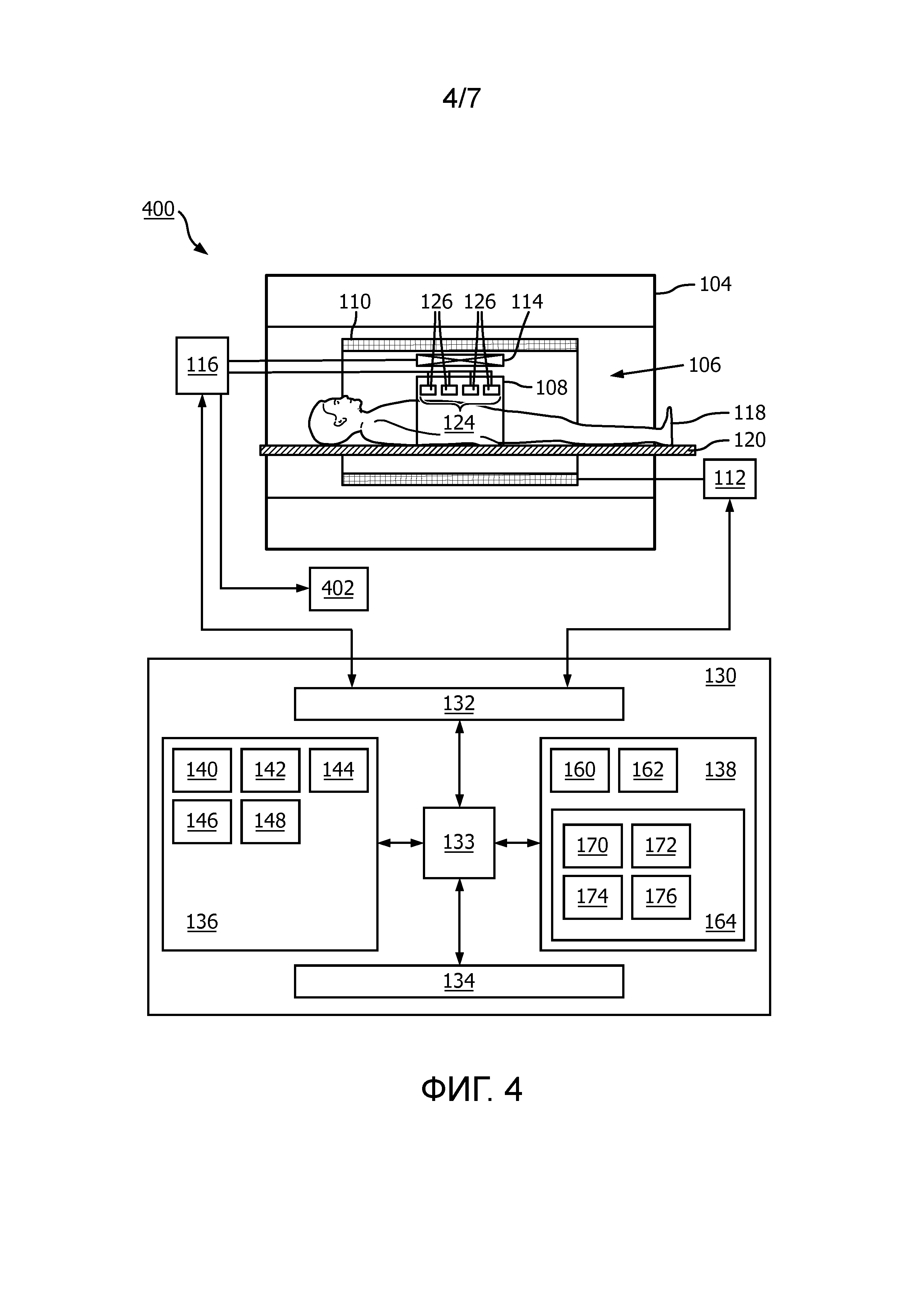
фиг. 4 изображает систему магнитно-резонансной томографии в соответствии с другим вариантом осуществления настоящего изобретения;
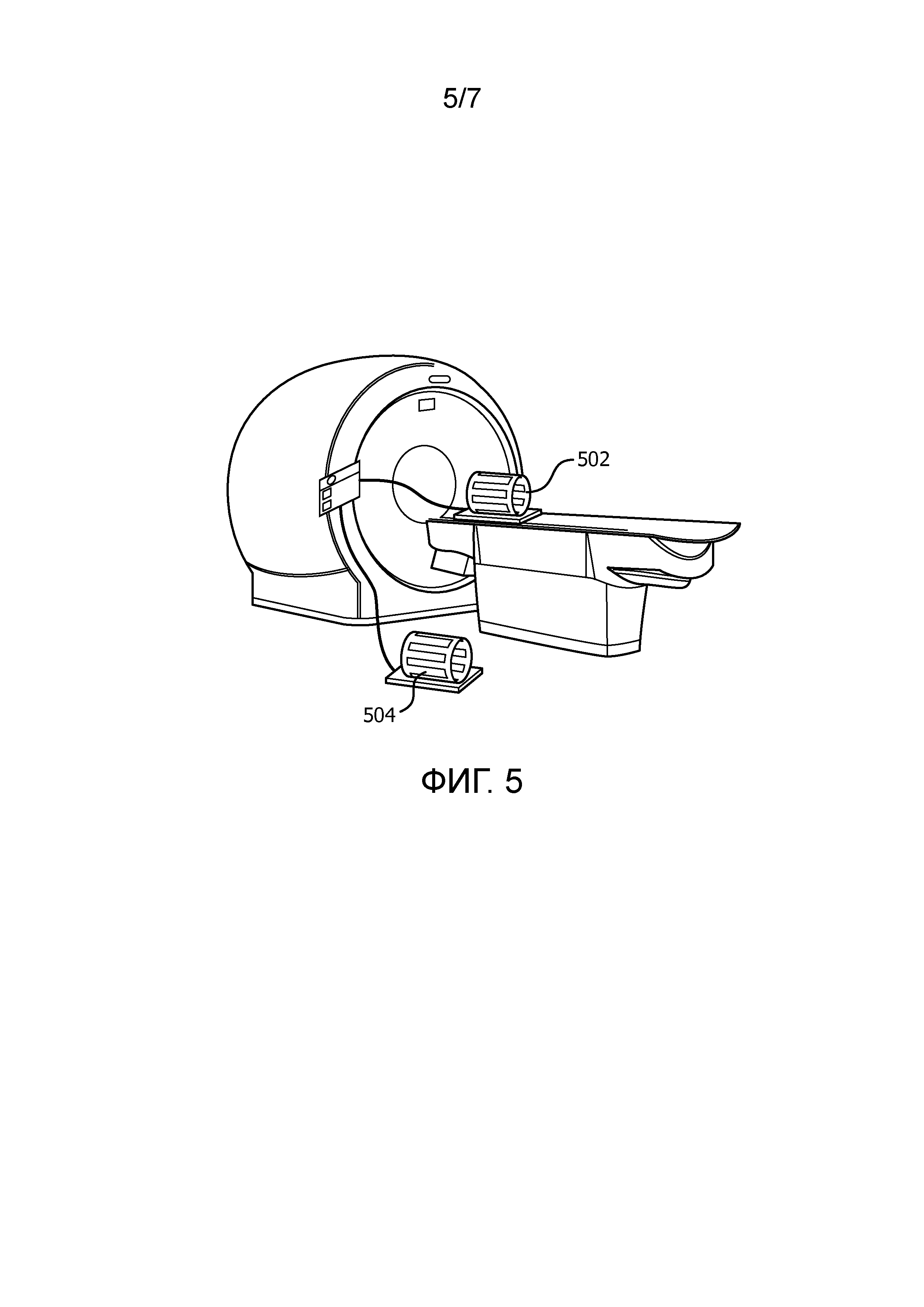
Фиг. 5 изображает пример катушки сниффера с фиг. 4 в соответствии с одним вариантом осуществления настоящего изобретения;
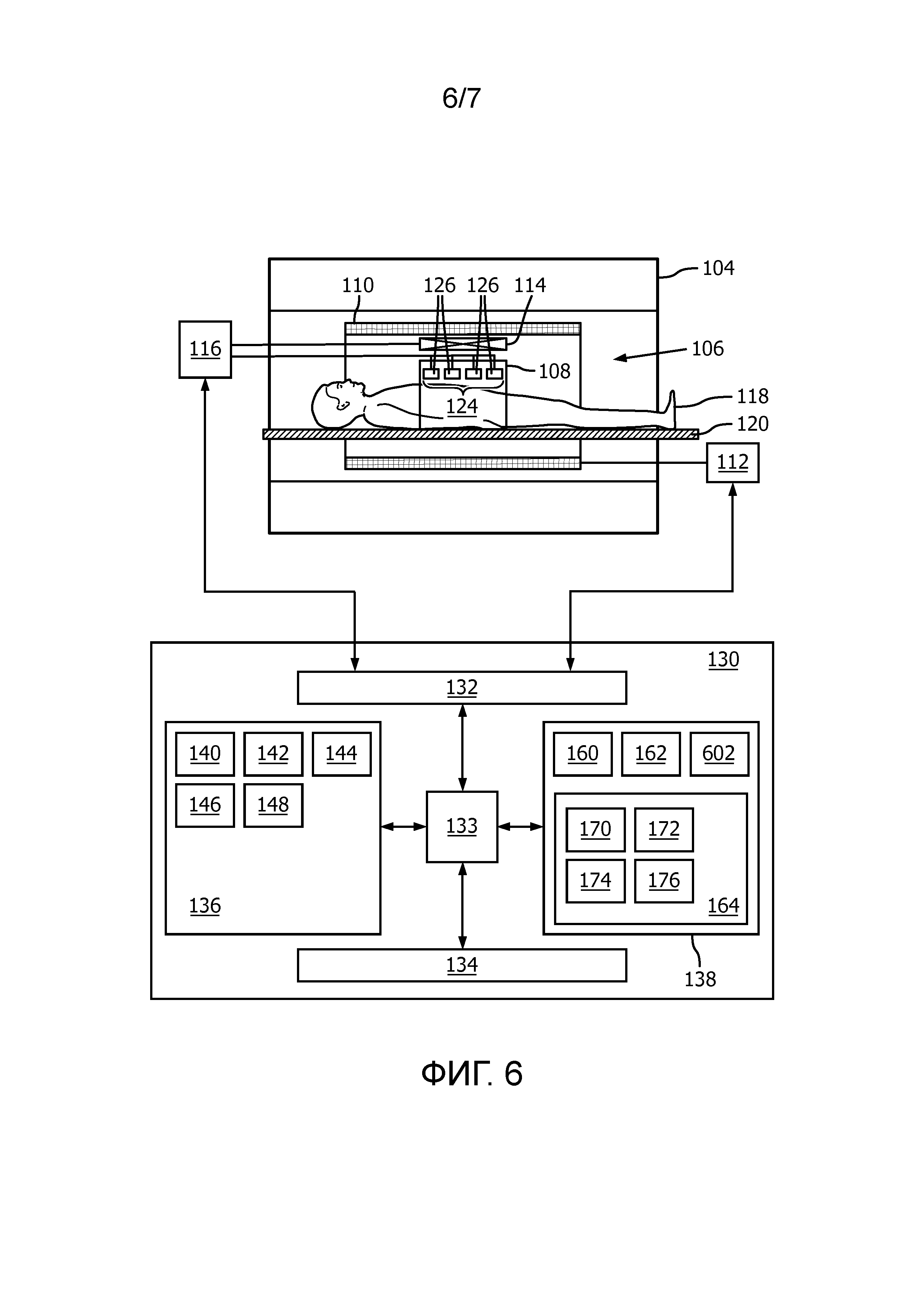
фиг. 6 изображает систему магнитно-резонансной томографии в соответствии с еще одним вариантом осуществления настоящего изобретения;
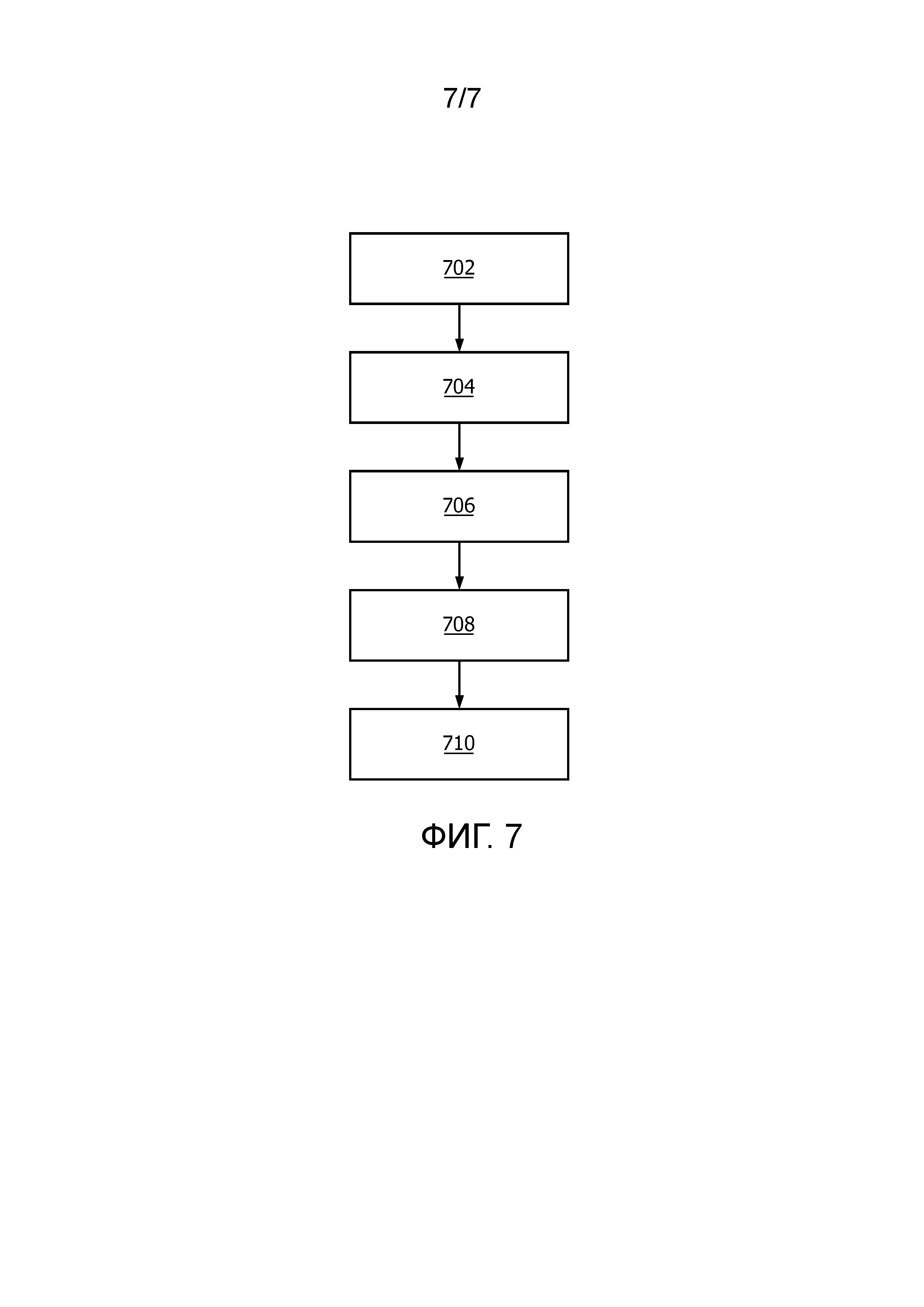
фиг. 7 показывает блок-схему последовательности операций способа подавления шумов окружающей среды системы магнитно-резонансной томографии (МРТ) в соответствии с одним вариантом осуществления настоящего изобретения.
Одинаковые ссылочные позиции на фигурах указывают аналогичные или соответствующие признаки и/или функциональности.
Настоящее изобретение будет описано в отношении конкретных вариантов осуществления и со ссылкой на некоторые чертежи, но изобретение не ограничивается ими, а только формулой изобретения. Описанные чертежи являются лишь схематичными и неограничивающими. На чертежах размер некоторых элементов может быть преувеличен и нарисован не в масштабе с иллюстративными целями.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Одинаково пронумерованные элементы на этих фигурах являются либо эквивалентными элементами, либо они выполняют одинаковую функцию. Элементы, которые обсуждались ранее, не обязательно будут обсуждаться на последующих фигурах, если их функция является эквивалентной.
Фиг. 1 показывает пример системы 100 магнитно-резонансной томографии. Система 100 магнитно-резонансной томографии содержит магнит 104. Магнит 104 является сверхпроводящим магнитом 104 цилиндрического типа с туннелем 106 внутри него. Также возможно использование магнитов других типов, например, также можно использовать как цилиндрический магнит из двух частей, так и так называемый открытый магнит. Цилиндрический магнит из двух частей аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции, чтобы обеспечить доступ к изоплоскости магнита, такие магниты могут, например, использоваться в сочетании с терапией пучком заряженных частиц. У открытого магнита есть две секции магнита, одна над другой с промежутком между ними, который является достаточно большим для того, чтобы принять объект: расположение этих двух секций аналогично таковым для катушки Гельмгольца. Открытые магниты популярны, потому что объект не так сильно стеснен. В криостате цилиндрического магнита имеется набор сверхпроводящих катушек. В туннеле 106 цилиндрического магнита 104 имеется зона 108 визуализации, где магнитное поле является сильным и достаточно однородным для выполнения магнитно-резонансной томографии.
В туннеле 106 магнита также имеется набор катушек 110 градиента магнитного поля, которые используются для сбора магнитно-резонансных данных для пространственного кодирования магнитных спинов в зоне 108 визуализации магнита 104. Катушки 110 градиента магнитного поля соединяются с источником 112 питания катушек градиента магнитного поля. Предполагается, что катушки 110 градиента магнитного поля являются типичными. Как правило, катушки 110 градиента магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник 112 питания градиента магнитного поля обеспечивает ток катушкам градиента магнитного поля. Ток, подаваемый катушкам 110 градиента магнитного поля, управляется как функция времени, и он может быть линейным или импульсным. Опора 120 объекта удерживает объект 118 в пределах зоны 108 визуализации.
В туннеле 106 магнита 104 имеется катушка 114 для тела. Катушка 114 для тела может быть QBC. Катушка 114 для тела показана соединенной с приемопередатчиком 116. В некоторых вариантах осуществления катушка 114 для тела также может быть соединена с усилителем высокой частоты и/или приемником катушки для всего тела, однако это не показано в этом примере. Если и передатчик, и приемник 116 соединяются с катушкой 114 для всего тела, может быть обеспечено средство для переключения между режимом передачи и режимом приема. Например, может использоваться схема с pin-диодом для выбора режима передачи или режима приема.
Приемопередатчик 116 показан соединенным с приемной антенной 124. В этом примере приемная антенна 124 сформирована как многоканальный массив катушек, содержащий несколько контуров 126 катушек.
Приемопередатчик 116 и источник 112 питания катушки градиента магнитного поля показаны соединенными с аппаратным интерфейсом 132 компьютера 130. Компьютер 130 дополнительно показан содержащим процессор 133, который выполнен с возможностью исполнения машиночитаемых инструкций. Компьютер 130 дополнительно показан содержащим пользовательский интерфейс 134, запоминающее устройство 136 компьютера и память 138 компьютера, которые все доступны и соединяются с процессором 133.
Запоминающее устройство 136 компьютера показано содержащим данные 140 последовательности импульсов. Запоминающее устройство 136 компьютера дополнительно показано содержащим томографические магнитно-резонансные данные 142, скорректированные магнитно-резонансные данные 144 и данные 146 РЧ-шумов. Томографические магнитно-резонансные данные 142 получают с использованием данных 140 последовательности импульсов через приемную антенну 114, 124, они включают в себя компонент РЧ-шумов от случайных помех окружающей среды, которые добавляются к требуемым магнитно-резонансным данным от объекта 118, например, пациента. Данные 146 РЧ-шумов указывают случайные помехи окружающей среды системы 100 магнитно-резонансной томографии. У скорректированных магнитно-резонансных данных 144 компонент РЧ-шумов был удален. Запоминающее устройство 136 компьютера дополнительно показано содержащим магнитно-резонансное изображение 148, которое было реконструировано из скорректированных томографических магнитно-резонансных данных 144. Как был упомянуто выше, приемная антенна 124 может включать в себя несколько контуров 126 катушек. В этом случае томографические магнитно-резонансные данные 142 включают в себя несколько подмножеств канальных магнитно-резонансных данных, каждое подмножество соответствует одному из нескольких контуров 126 катушки. Соответственно, каждое подмножество канальных магнитно-резонансных данных имеет соответствующий компомент канальных РЧ-шумов и скорректированных канальных магнитно-резонансных данных 144. С целью иллюстрации приведенный ниже алгоритм подавления шумов описывается, главным образом, в отношении томографических магнитно-резонансных данных 142 одного канала.
Память 138 компьютера показана содержащей модуль 160 управления. Модуль управления содержит исполняемый компьютером код, который позволяет процессору 133 управлять работой и функционированием системы 100 магнитно-резонансной томографии. Запоминающее устройство 138 компьютера показано необязательно содержащим модуль 162 реконструкции изображения, который позволяет процессору 133 реконструировать магнитно-резонансные изображения 148 из скорректированных магнитно-резонансных данных 144. Память 138 компьютера дополнительно показана содержащей модуль 164 подавления шумов. Модуль 164 подавления шумов содержит исполняемый компьютером код, который позволяет процессору 133 выполнять подавление шумов в томографических магнитно-резонансных данных 142 для генерации скорректированных томографических магнитно-резонансных данных 144. Иллюстративный модуль управления, модуль реконструкции изображения и модуль подавления шумов изображенного примера на фиг. 1 реализуются с помощью процессора, выполняющего инструкции, но они альтернативно могут быть реализованы с помощью ASIC, DSP, FPGA или другой схемы.
В одном варианте осуществления модуль 164 подавления шумов дополнительно содержит модуль 170 сбора данных, модуль 172 вычисления коэффициента компенсации, модуль 174 оценки шумов и модуль 176 коррекции данных. Аналогично модуль 170 сбора данных, модуль 172 вычисления коэффициента компенсации, модуль 174 оценки шумов и модуль 176 коррекции данных изображенного примера на фиг. 1 реализуются с помощью процессора 133, выполняющего инструкции, но они альтернативно могут быть реализованы с помощью ASIC, DSP, FPGA или другой схемы. Модуль 170 сбора данных содержит исполняемый компьютером код, который позволяет процессору 133 считывать томографические магнитно-резонансные данные 142 и данные 146 РЧ-шумов, сохраненные в запоминающем устройстве 136 компьютера. Поскольку томографические магнитно-резонансные данные 142 содержат требуемый магнитно-резонансной сигнал от объекта 118 и компонент РЧ-шумов от случайных шумов окружающей среды, они могут быть даны с помощью уравнения (1)
SRX=NEX+SМР (1)
где SRX представляет собой томографические магнитно-резонансные данные 142, полученные с помощью приемной антенны 124, NEX представляет собой компонент РЧ-шумов от шумов окружающей среды, а SМР представляет собой требуемый МР-сигнал от объекта 118. Как было упомянуто выше, данные 146 РЧ-шумов указывают шумы окружающей среды системы 100 магнитно-резонансной томографии. Путем рассмотрения амплитуды и фазовой разности шумов окружающей среды в различных местах комнаты для сканирования данные 146 РЧ-шумов могут быть переведены в компонент РЧ-шумов путем умножения на коэффициент α компенсации в соответствии с уравнением (2)
NEX=NR*α (2)
где NR представляет собой данные 146 РЧ-шумов. Коэффициент α компенсации является комплексным отношением, и, таким образом, уравнение (2) также может быть выражено в виде
NEX=NR*Ae-jwΔt (3)
где величина A комплексного отношения α представляет собой затухание при распространении шумов окружающей среды при достижении конкретного приемного канала 126 в многоканальной приемной антенне 124, ω представляет несущую частоту шумов окружающей среды, а временная задержка Δt представляет собой различное время прибытия (TOA) шумов окружающей среды, достигающих различных контуров 126 катушек в их местоположениях в многоканальной приемной катушке 124.
Кроме того, как было упомянуто выше, приемная антенна 124 сформирована как многоканальный массив катушек, содержащий несколько контуров 126 катушек. Каждый канал антенны генерирует свое собственное k-пространство после приема магнитно-резонансного сигнала. Обычно шумы окружающей среды распространяют вдоль различных маршрутов и достигают каждый канал антенны в разное время. В результате захваченные каждым каналом антенны компоненты шумов различаются по силе. Помимо различной силы эти компоненты шумов в k-пространстве каждого канала антенны смещены на временную задержку в результате различного времени прибытия. Преимущественно, подход к подавлению шумов, как обсуждалось в отношении уравнений (1), (2) и (3), может быть применен к каждому k-пространству данных канала для вычисления 1-мерного комплексного компенсационного вектора для соответствующего канала антенны. Таким образом, сила и разность фаз между каналами антенны учитываются при подавлении шумов окружающей среды. Учитывая упомянутое выше, если может быть получен коэффициент α компенсации для конкретного канала, компонент РЧ-шумов, добавленный к требуемым магнитно-резонансным данным, может быть оценен в соответствии с уравнением (2). В одном варианте осуществления модуль 172 вычисления коэффициента компенсации содержит исполняемый компьютером код, который позволяет процессору 133 реализовать алгоритм, как описано ниже, для вычисления коэффициента α компенсации.
Со ссылкой на фиг. 2a и фиг. 2b, представление k-пространства на фиг. 2a томографических магнитно-резонансных данных 142 сравнивается с представлением k-пространства на фиг. 2b данных 146 РЧ-шумов. В примере на фиг. 2a и фиг. 2b оба k-пространства имеют размер в 1000 частотно-кодирующих градиентов (k-значений) на 400 фазокодирующих градиентов (k-значений). Для ясности и краткости здесь изображены только верхняя и центральная части k-пространств. Так как данные 146 РЧ-шумов собираются одновременно со сбором томографических магнитно-резонансных данных 142, линии данных k-пространства томографических магнитно-резонансных данных фиг. 2a выставлены с линиями данных k-пространства данных РЧ-шумов фиг. 2b. Для каждого из фазокодирующих градиентов дискретные значения данных в линиях данных фиг. 2a могут быть смоделированы как SRX, которые являются функцией дискретных значений данных в соответствующих линиях данных фиг. 2b, например, смоделированных как NR, в соответствии с уравнениями 1) и 2).
Обращаясь к фиг. 2a, краевая часть 201, например, часть, содержащая линии данных с фазокодирующими градиентами (k-значениями) от 1 до 4, хранит довольно слабые магнитно-резонансные сигналы из-за сильного эффекта расфазировки спинов, вызванного самым сильным полем фазокодирующего градиента. Синусоидальные волны 203, присутствующие в краевой части 201, представляют собой, главным образом, компонент РЧ-шумов от шумов окружающей среды. Обращаясь к фиг. 2b, краевая часть 205, например, часть, содержащая линии данных, захваченные при тех же самых фазокодирующих градиентах от 1 до 4, показывает четкие и сильные синусоидальные волны 207, которые представляют собой данные основной полосы частот данных 146 РЧ-шумов.
Так как в краевой части 201 k-пространства томографических магнитно-резонансных данных преобладает компонент РЧ-шумов, уравнения 1) и 2) могут быть модифицированы для получения уравнения 4) при предположении, что на линиях данных в краевой части 201 k-пространства томографических магнитно-резонансных данных требуемый магнитно-резонансный сигнал от объекта 118 равен нулю,
SRX_N=NR_N*αN (4)
где SRX_N представляет собой дискретные значения данных в линии N данных в краевой части 201 k-пространства томографических магнитно-резонансных данных, NR_N представляет собой дискретные значения данных в линии N данных в краевой части 205 k-пространства данных РЧ-шумов, и aN представляет собой коэффициент компенсации для линии N данных в краевой части 201 k-пространства МР-данных. Решением для aN является решение проблемы минимизации наименьших квадратов для минимизации M
M=∑|SRX_N-NR_N*αN|2 (5)
Для линий данных в центральной части k-пространства, например, фазокодирующего градиента вокруг 200 на фиг. 2a и фиг. 2b томографические магнитно-резонансные сигналы в центре эха этих линий данных настолько сильны, что компонент РЧ-шумов не является доминирующим. Соответственно, уравнение 4) невозможно легко применить к линиям данных в центральной части k-пространства. Однако, со ссылкой на фиг. 2a, компонент РЧ-шумов все еще доминирует в линиях данных вокруг центра k-пространства в передней и задней частях 210 этих линий данных из-за сильно эффекта расфазировки, когда центр эха находится далеко. Таким образом, уравнение 4) может быть модифицировано в уравнение
S'RX_N=N'R_N*αN (6)
путем использования только дискретных значений данных в передней и задней частях 210 и 220 линий данных вокруг центра k-пространства томографических магнитно-резонансных данных и центра k-пространства данных РЧ-шумов, соответственно. То есть S'RX_N представляет собой дискретные значения данных в передней и задней частях 210 линий данных вокруг центра k-пространства томографических магнитно-резонансных данных, а N'R_N представляет собой дискретные значение данных в передней и задней частях 220 линии данных вокруг центра k-пространства данных РЧ-шумов. Аналогично решением для αN для линии N данных вокруг центра k-пространства томографических магнитно-резонансных данных является решение проблемы минимизации наименьших квадратов для минимизации M'
M'=∑|S'RX_N-N'R_N*αN|2 (7)
Резюмируя, модуль 172 вычисления коэффициента компенсации вначале выбирает периферийный участок (201, 210) k-пространства, хранящего томографические магнитно-резонансные данные 142, где компонент РЧ-шумов доминирует, например, линии данных с верхнего и нижнего края k-пространства и в передней и задней частях линий данных вокруг центра k-пространства. Затем вычисляется коэффициент αN компенсации для каждой линии N данных в соответствии с уравнениями (4) и (5), когда линия N данных находится с верхнего и нижнего края k-пространства, и в соответствии с уравнениями (6) и (7), когда линия N данных находится вблизи центра k-пространства.
Как упоминалось выше, k-пространство является 2D или 3D преобразованием Фурье измеренного МР-изображения. На практике K-пространством часто называется временное пространство изображения, в котором данные от оцифрованных МР-сигналов хранятся в форме 2D или 3D комплексной матрицы с хорошим свойством симметрии. Центр 2D k-пространства, то есть среднее k-значение и по частотно-кодирующему, и по фазокодирующему направлению, имеет наибольшие дискретные значения МР-сигнала, потому что прецессия спинов остается в синфазном состоянии. Периферийная часть матрицы, например, области наибольших/наименьших k-значений в фазо- или частотно-кодирующем направлении 2D k-пространства имеют относительно маленькие дискретные значения МР-сигнала из-за расфазированного состояния прецессии спина. Например, 10% или меньше от общего количества линий кодирования фазы с наибольшими/наименьшими k-значениями, симметрично распределенные относительно центральной линии кодирования фазы, или 80% или меньше от общего количества линий кодирования частоты с наибольшими/наименьшими k-значениями, симметрично распределенные относительно центральной линии кодирования частоты, могут называться периферийными участками в 2D k-пространстве. В некоторых случаях из-за задержки приема МР-сигнала или запланированного строения импульса центр k-пространства смещается вперед или назад относительно геометрического центра матрицы, вызывая неравномерное распределение упомянутых 80% или менее от общего количества частотно-кодирующих линий. В обоих случаях периферийный участок k-пространства, используемого для подавления шумов, может быть определен с помощью нескольких испытаний для получения наиболее предпочтительного коэффициента α компенсации, который приводит к наилучшему качеству изображения. Для 3D K-пространства 3-е измерение является фазокодированным. Каждый 2D срез K-пространства также имеет фазо- и частотно-кодирующее направление, что справедливо как для K-пространства МР-данных, так и для K-пространства данных РЧ-шумов. Затем каждый срез k-пространства будет обрабатываться как отдельный канал во время вычисления коэффициентов компенсации.
С вычисленным коэффициентом α компенсации для каждой линии данных модуль 174 оценки шумов может оценить компонент NEX шумов, добавленный к требуемому МР-сигналу SМР, в соответствии с уравнением (2). С оцененным компонентом NEX шумов модуль 176 коррекции данных может получить желаемый МР-сигнал SМР от объекта 118 путем вычитания оцененного компонента NEX шумов из томографических магнитно-резонансных данных 142, полученных с помощью приемной антенны 124, тем самым реализуя подавление РЧ-шумов.
Преимущественно, путем учета характеристик распределения необработанных томографических магнитно-резонансных данных в k-пространстве, а именно, доминирования компонента РЧ-шумов в периферийном участке k-пространства, периферийный участок k-пространства, в которой доминирует компонент РЧ-шумов, выбирается для вычисления коэффициента компенсации. Кроме того, коэффициент компенсации для каждой линии данных вычисляется индивидуально путем учета распределения РЧ-шумов в каждой линии данных. Таким образом, получается вектор коэффициента компенсации, в котором каждый векторный элемент aN представляет собой коэффициент компенсации для линии данных фазокодирующего градиента N. Такой подход может захватывать эволюцию шумов окружающей среды для каждого времени TR повтора для получения различного коэффициента компенсации для каждого фазокодирующего градиента, что значительно увеличивает разрешение во времени подавления шумов окружающей среды.
Альтернативно, как компромисс между точностью и скоростью подавления шумов окружающей среды, дискретные значения данных в передней и задней частях 310 линий данных во всем k-пространстве томографических магнитно-резонансных данных на фиг. 3a и дискретные значения данных в передней и задней частях 320 линий данных во всем k-пространстве данных РЧ-шумов на фиг. 3b выбираются для вычисления коэффициента компенсации в соответствии с уравнениями (6) и (7).
Кроме того, следуем понимать, что для реализации подавления шумов в режиме реального времени, данные 146 РЧ-шумов должны быть получены одновременно с томографическими магнитно-резонансными данными 142. Варианты осуществления ниже будут более детально описывать то, как достигается одновременный прием данных 146 РЧ-шумов и томографических магнитно-резонансных данных 142.
Со ссылкой на фиг. 4 система магнитно-резонансной томографии 400 показана имеющей катушку 402 сниффера, расположенную вне туннеля 106 системы 400 магнитно-резонансной томографии. Катушка 402 сниффера размещается далеко от зоны 108 визуализации. Сбор данных 146 РЧ-шумов синхронен со сбором томографических магнитно-резонансных данных 142, только сигнал, который измеряет катушка 402 сниффера, будет преимущественно данными 146 РЧ-шумов в противоположность катушке 114 или 124, которая измеряет шумы плюс магнитно-резонансные сигналы 142 от объекта 118.
Приемопередатчик 116 показан дополнительно соединенным с катушкой 402 сниффера. Приемопередатчик 116 является многоканальным приемопередатчиком. В некоторых вариантах осуществления приемопередатчик 116 может быть разделен на несколько различных блоков. Однако может быть выгодным использовать дополнительные каналы приемопередатчика 116 для катушки 402 сниффера, поскольку полученные сигналы будут обработаны таким же образом, как данные, полученные с использованием антенн 114, 124.
Как правило, система 400 магнитно-резонансной томографии будет оборудована большим количеством стандартных приемных катушек, например, катушками для головы, катушками для спинного хребта, катушками для запястья и т.д. Когда определенная стандартная приемная катушка размещается в зоне 108 визуализации для обнаружения томографических магнитно-резонансных сигналов, запасные стандартные приемные катушки находятся в нише в состоянии простоя. Преимущественно, в настоящем подходе к подавлению шумов такие запасные стандартные приемные катушки могут быть повторно использованы в качестве катушки 402 сниффера для размещения вне зоны 108 визуализации, чтобы преимущественно измерять шумы окружающей среды. В примере на фиг. 5 одна катушка 502 для головы вставлена в зону 108 визуализации для обнаружения томографического магнитно-резонансного сигнала, в то время как другая запасная катушка для головы 504 помещается на полу комнаты для сканирования, который находится на расстоянии от зоны 108 визуализации, только для измерения шумов окружающей среды. Так как катушка 504 для головы, размещенная вне зоны 108 визуализации, также является стандартной приемной катушкой, система 400 магнитно-резонансной томографии будет обрабатывать ее таким же образом, как катушку 502 для головы. Таким образом, не требуется ни модификации аппаратного обеспечения для системы 400 магнитно-резонансной томографии для реализации сбора шумов окружающей среды синхронно со сбором томографических магнитно-резонансных данных, ни специализированной катушки сниффера. Другими словами, путем повторного использования стандартной приемной катушки в качестве катушки сниффера традиционная система магнитно-резонансной томографии может быть легко адаптирована для выполнения функции подавления шумов, когда присутствуют шумы окружающей среды. Также в этом процессе подавления шумов необходим модуль 164 подавления шумов.
Альтернативно, для приемной антенны 124 с несколькими контурами 126 катушек компоненты шумов, содержащиеся в многоканальных необработанных данных, не только статистически близко коррелированы, но также и линейно коррелированы, что позволяет использовать статистический способ извлечения данных 146 РЧ-шумов, указывающих шумы окружающей среды, из многоканальных необработанных данных. Как показано на фиг. 6, такой статистический способ реализуется с помощью модуля 602 виртуального сниффера, который содержит исполняемый компьютером код, позволяющий процессору 133 извлекать данные 146 РЧ-шумов из набора 142 многоканальных магнитно-резонансных данных и генерировать опорные данные 146 РЧ-шумов для процедуры подавления шумов, изображенной на фиг. 2a/фиг. 2b и фиг. 3a/фиг. 3b.
Одним иллюстративным статистическим способом извлечения данных РЧ-шумов является анализ главных компонентов (PCA). Совместный анализ данных двух или более каналов будет идентифицировать распределение РЧ-шумов во времени и в пределах кадра K-пространства как уникальный собственный вектор и извлекать для формирования данных 146 РЧ-шумов. МР-сигналы, которые распределены среди данных каналов, в отличие от РЧ-шумов, также будут идентифицироваться как другой собственный вектор и извлекаться для формирования томографических магнитно-резонансных данных 142.
Дальнейшие этапы для подавления шумов являются такими же, как выше, и для краткости не будут описываться еще раз.
Альтернативно, также может использоваться другой статистический способ извлечения данных РЧ-шумов, такой как анализ независимых компонентов (ICA). Преимущественно, путем использования модуля 602 виртуального сниффера можно избежать издержек на аппаратное обеспечение, и поэтому подавление шумов реализуется более экономичным образом.
Специалистам в области техники будет понятно, что нет необходимости использовать томографические МР-данные от всех каналов антенны для извлечения данные РЧ-шумов.
Фиг. 7 изображает блок-схему 700 последовательности операций способа подавления шумов окружающей среды в системе магнитно-резонансной томографии в соответствии с одним вариантом осуществления настоящего изобретения.
На этапе 702 магнитно-резонансные данные, содержащие компонент РЧ-шумов, получают через приемную антенну. В варианте осуществления на фиг. 1 томографические магнитно-резонансные данные 142, которые включают в себя компонент РЧ-шумов от шумов окружающей среды, получают через приемную антенну 124.
На этапе 704 получают данные РЧ-шумов, указывающие шумы окружающей среды системы МРТ. В варианте осуществления на фиг. 4 данные РЧ-шумов получают с помощью катушки 402 сниффера. В варианте осуществления на фиг. 6 данные РЧ-шумов получают путем извлечения их из многоканальных магнитно-резонансных данных 142 с помощью модуля 602 виртуального сниффера.
На этапе 706 вычисляется коэффициент компенсации на основании данных РЧ-шумов и части МР-данных в периферийном участке k-пространства, хранящего магнитно-резонансные данные. В варианте осуществления на фиг. 2a выбираются периферийные участки 201 и 210 k-пространства, хранящего томографические магнитно-резонансные данные 142, для вычисления коэффициента компенсации в соответствии с уравнениями 5) и 7). В варианте осуществления на фиг. 3a выбирается периферийный участок 310 k-пространства, хранящего томографические магнитно-резонансные данные 142, для вычисления коэффициента компенсации в соответствии с уравнением 7).
На этапе 708 оценивается компонент РЧ-шумов магнитно-резонансных данных как произведение данных РЧ-шумов и вычисленного коэффициента компенсации. В варианте осуществления на фиг. 1 модуль 174 оценки шумов оценивает компонент РЧ-шумов томографических магнитно-резонансных данных 142 в соответствии с уравнением 2).
На этапе 710 генерируются скорректированные магнитно-резонансные данные путем вычитания оцененного компонента РЧ-шумов из магнитно-резонансных данных. В варианте осуществления на фиг. 1 модуль 176 коррекции данных генерирует скорректированные магнитно-резонансные данные 144 путем вычитания оцененного компонента РЧ-шумов из томографических магнитно-резонансных данных 142 в соответствии с уравнением 1).
Следует отметить, что устройство и способ в соответствии с настоящим изобретением не должно ограничиваться только упомянутыми выше устройством и способом. Для специалистов в области техники будет очевидно, что различные аспекты заявленного изобретения могут быть реализованы на практике в других примерах, которые отступают от этих конкретных подробностей.
Кроме того, тот факт, что некоторые признаки перечислены в различных взаимозависимых пунктах формулы изобретения не означает, что комбинация этих признаков не может быть использована с выгодой.
Следует отметить, что упомянутые выше варианты осуществления иллюстрируют, а не ограничивают изобретение, и что специалисты в области техники смогут спроектировать альтернативные варианты осуществления, не отступая от объема прилагаемой формулы изобретения. В формуле изобретения любые ссылочные позиции, помещенные между круглыми скобками, не должны рассматриваться как ограничение формулы изобретения. Слово «содержащий» не исключает присутствие элементов или этапов, не перечисленных в пункте формулы изобретения или в описании. Единственное число элемента не исключают присутствие множества таких элементов. В пункте формулы изобретения на продукт, перечисляющем несколько блоков, несколько из этих блоков могут быть воплощены с помощью одного и того же элемента программного обеспечения и/или аппаратного обеспечения. Использование слов первый, второй, третий и так далее не указывает какой-либо порядок следования. Эти слова должны интерпретироваться как названия.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия

