Результат интеллектуальной деятельности: СИСТЕМА ПОШАГОВОГО КОНТРОЛЯ КОЛЬЦЕВОГО СВАРНОГО ШВА ТРУБОПРОВОДА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к переносным устройствам для неразрушающего контроля трубопроводов радиационными методами с помощью ионизирующего, например, рентгеновского излучения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Для устройств контроля трубопроводов необходимо высокое качество контроля. При этом переносные устройства для контроля кольцевых швов трубопроводов эксплуатируются чаще всего в полевых условиях. Поэтому желательно, чтобы они были просты в эксплуатации, мобильны и надежны в работе.
Применяются системы, в которых каретка с источником рентгеновского излучения и каретка с детектором рентгеновского излучения установлены на съемном направляющем поясе, охватывающем трубу трубопровода.
Известно портативное цифровое устройство для контроля сварных швов с двумя дорожками по патенту CN 106442578, публикация 22.02.2017, МПК G01N 23/04. Изобретение в основном направлено на решение проблем, связанных с тем, что существующие устройства контроля сварного шва в трубопроводе неудобно разбирать и собирать, подвижная опора и дорожка легко повреждаются из-за чрезмерно тяжелого оборудования. Проблема решается тем, что система состоит из основной направляющей дорожки с цепью и вспомогательной дорожки. Каретка с источником рентгеновского излучения и каретка с детектором рентгеновского излучения крепятся на двух направляющих, разнесенных по длине трубопровода, чем и обеспечивается устойчивость оборудования, размещаемого на каретках.
Известно устройство контроля сварного шва трубопровода путем получения цифрового изображения по патенту CN 108844975, публикация 20.11.2018, МПК G01N 23/04, включающее направляющий пояс, на котором с возможностью передвижения вдоль пояса установлены каретка с источником рентгеновского излучения и каретка с детектором рентгеновского излучения. При этом на направляющем поясе установлена направляющая цепь, а на каждой каретке установлено цепное колесо, взаимодействующее с цепью, чем обеспечивается синхронность движения кареток.
Известна цифровая рентгенографическая система контроля продольных сварных швов по патенту US 6137860, публикация 24.10.2000, МПК В24В 7/00, G01N 23/04. Цифровая рентгенографическая камера прикреплена к каретке, которая подвижно установлена на вертикальном сварном приспособлении на вогнутой стороне сварного шва ствола. При этом система контроля работает пошагово.
Известно устройство для внешнего осмотра сварных швов трубопроводов по патенту RU 2533757, публикация 20.11.2014, МПК G01N 23/04. Устройство включает источник излучения и детектор излучения, которые контролируемо движутся вокруг направляющей установленной вокруг кольцевого сварного шва.
Наиболее близким является устройство, описанное в заявке RU 2015123501, публикация 10.01.2017, МПК G01N 23/18. Устройство содержит источник рентгеновского излучения и рентгеновский детектор с автономным источником питания установленные на своей каретке, перемещающиеся по направляющему поясу. При этом устройство работает пошагово.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Техническим результатом, достигаемым в заявляемом изобретении, является упрощение конструкции и повышение надежности работы системы контроля.
Система пошагового контроля кольцевого шва трубопровода включает направляющий пояс, на котором с возможностью передвижения вдоль пояса установлены каретка с источником рентгеновского излучения и каретка с детектором рентгеновского излучения. Каждая из кареток снабжена двигателем, обеспечивающим передвижение каретки, блоком управления движением каретки и блоком передачи сигналов между каретками, датчиком перемещения и датчиком угла наклона к горизонту. Кроме того, каретка детектора рентгеновского излучения включает блок хранения радиографических снимков участков кольцевого шва.
Данная система контроля шва трубопровода выполняет пошаговую сьемку кольцевого шва трубопровода, состоящую из отдельных снимков участков шва, выполняемых при остановке каретки с источником рентгеновского излучения и каретки с детектором рентгеновского излучения. Так как процесс съемки выполняется при остановке кареток, то их конструкция может быть выполнена менее жесткой, более простой, так как колебания кареток при полной остановке исключаются. При такой конструкции каретки могут двигаться с разной скоростью, ввиду того, что источник рентгеновского излучения, как правило, весит гораздо больше детектора, и для безопасности перемещения, он может двигаться медленнее. Однако, из-за того, что каретки движутся независимо, необходимо обеспечить, чтобы они при съеме участков шва останавливались оппозитно, напротив друг друга. Для этого и применяются в системе блоки управления движением каретки и блоки передачи сигналов между каретками, датчики перемещения и датчики угла наклона к горизонту. При этом не требуется жесткое зацепление между направляющим поясом и ведущими механизмами каретки, которые делают систему жесткой, громоздкой и неудобной в эксплуатации.
В частности, каждая из кареток содержит, по меньшей мере, одно ведущее колесо и ведомые колеса с ребордами, а катящая поверхность колес выполнена с возможностью качения по боковой поверхности направляющего пояса, при этом одно из упомянутых ведомых колес выполнено с возможностью отсчета числа оборотов колеса датчиком перемещения каретки.
В частности, катящая поверхность ведомого колеса может быть выполнена с рифлением.
Кроме того, боковая поверхность пояса может быть выполнена гладкой.
Каждая из упомянутых кареток может быть снабжена автономным блоком питания, обеспечивающим передвижение каретки и работу блоков и устройств, установленных на каретке.
В частности, направляющий пояс выполнен съемным.
Помимо этого, блок управления движением каретки источника с источником рентгеновского излучения и блок управления движением каретки с детектором рентгеновского излучения выполнены с возможностью движения каждой из кареток со своей оптимальной скоростью.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение поясняется рисунками.
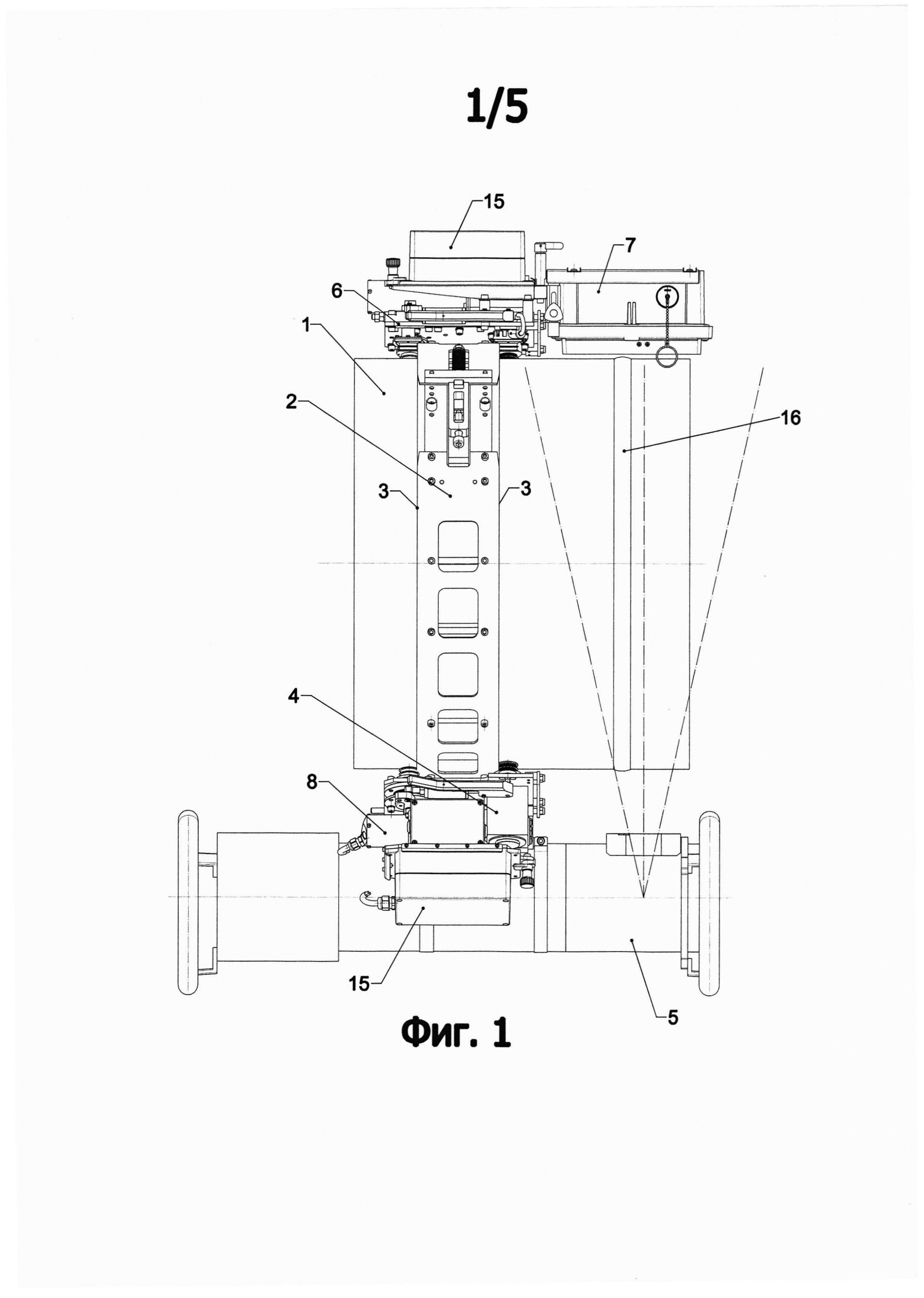
На Фиг. 1 приведен вид системы в сборе, установленной на трубопроводе.
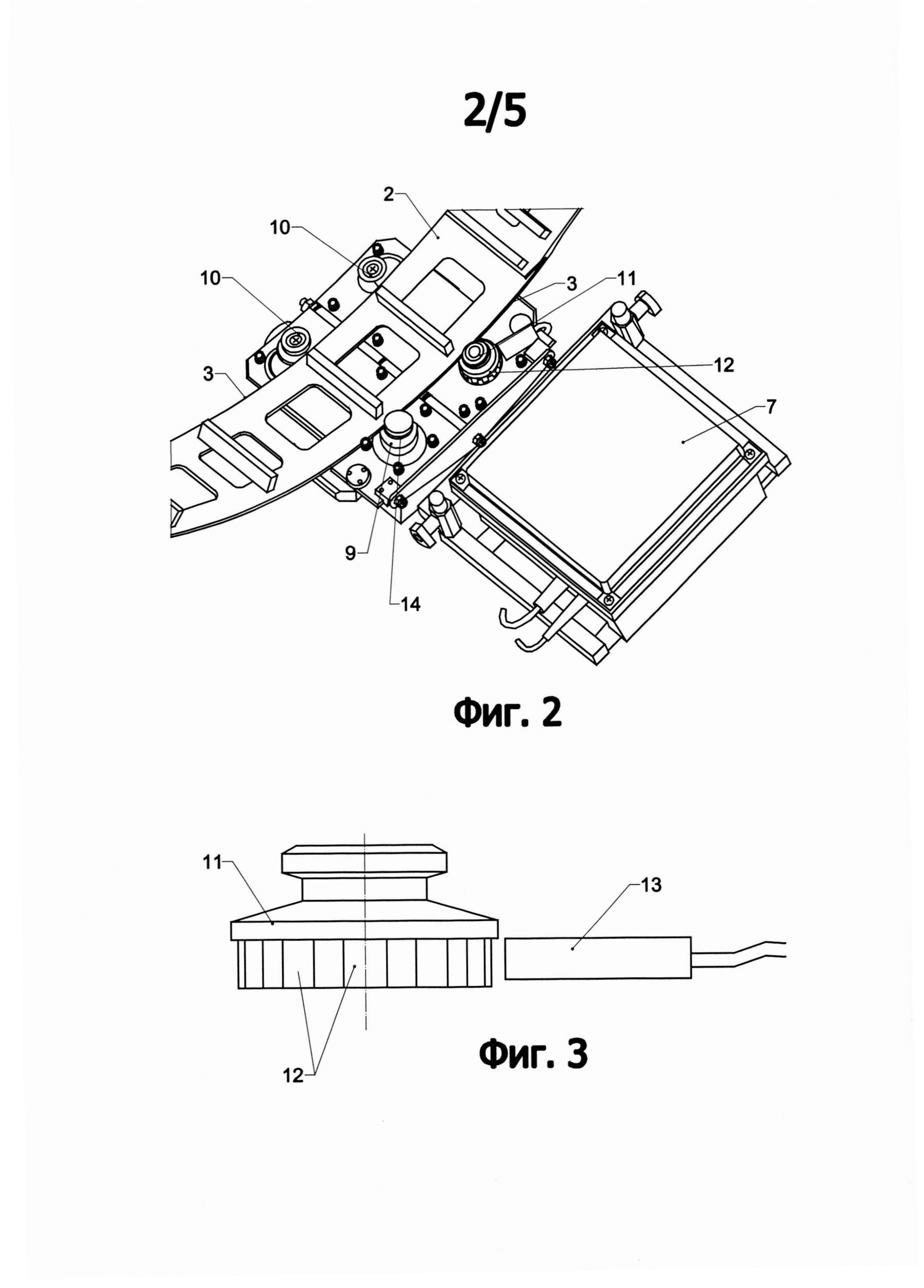
На Фиг. 2 показано расположение тележки на направляющем поясе, на виде снизу.
На Фиг 3 показано ведомое колесо с датчиком перемещения каретки.
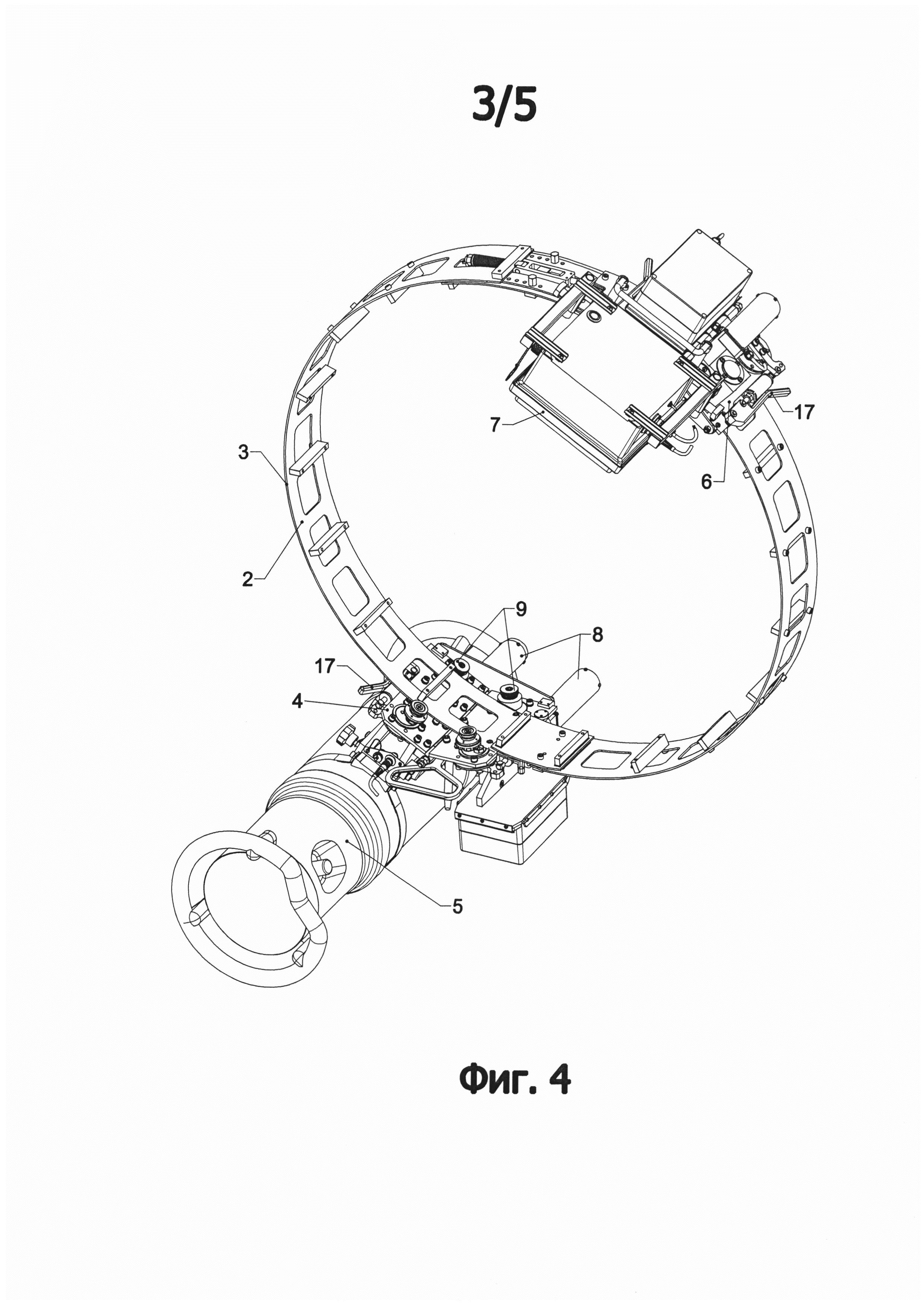
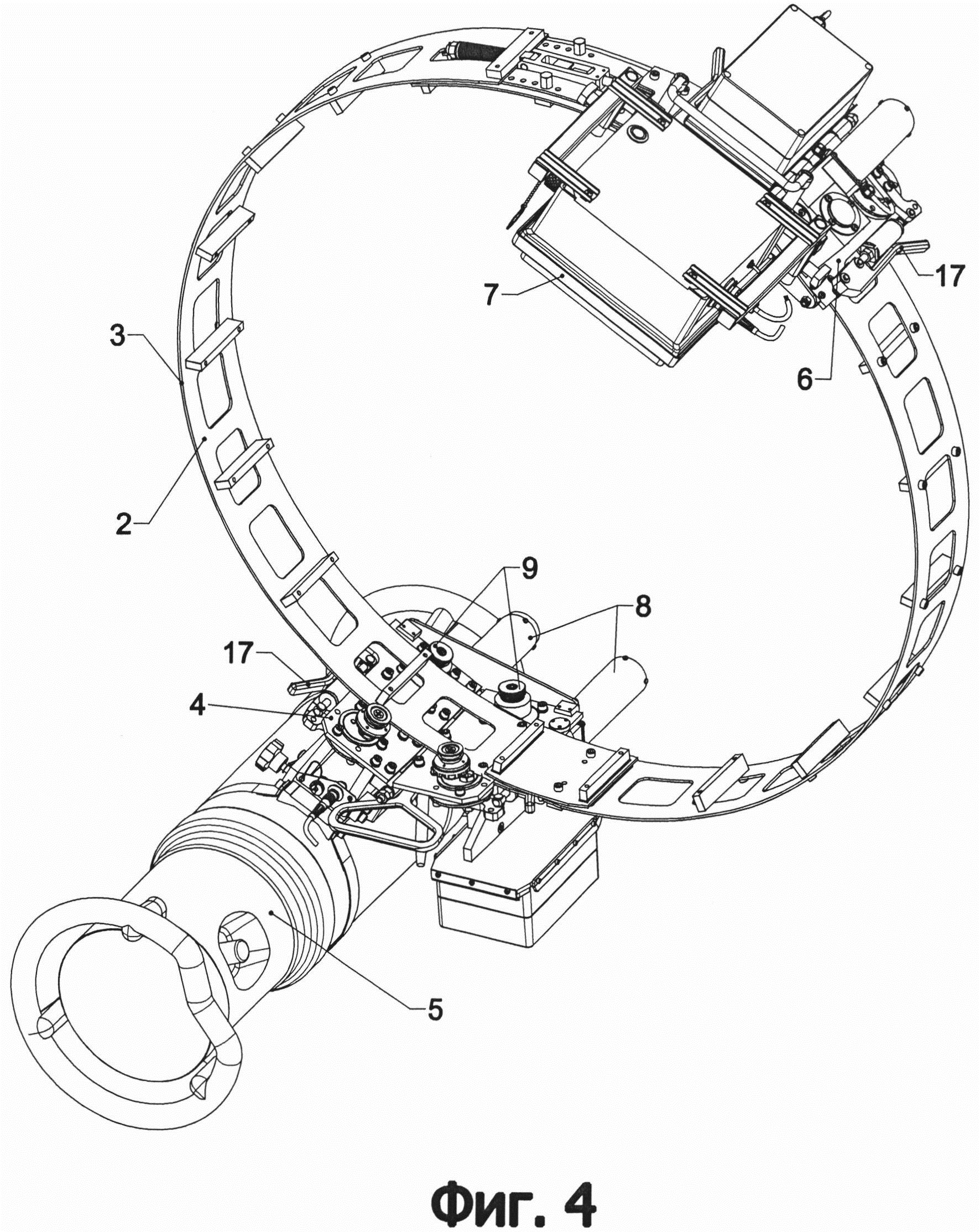
На Фиг. 4 приведена конструкция каретки с источником излучения, которая имеет два ведущих колеса.
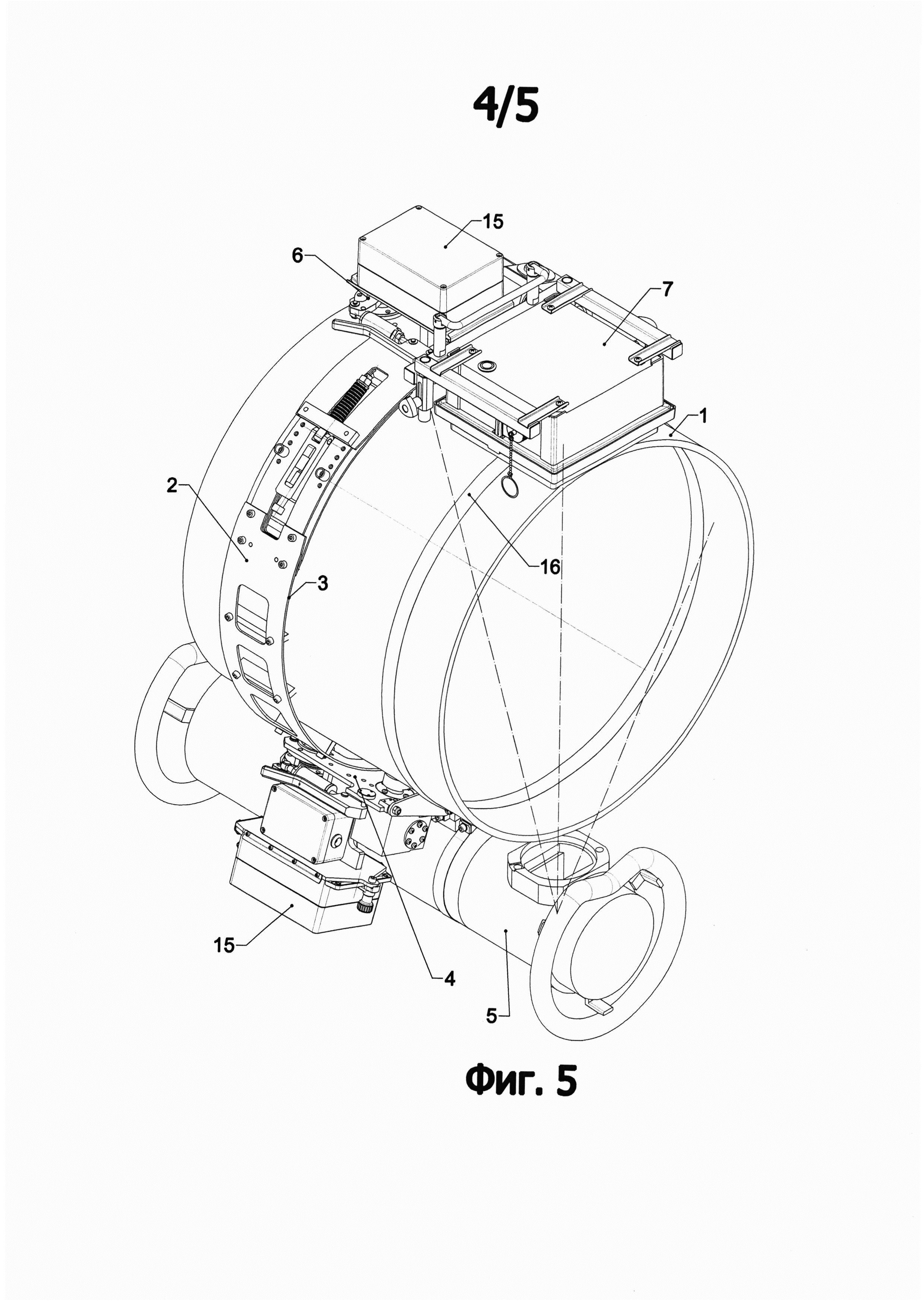
На Фиг. 5 показано расположение кареток с источником рентгеновского излучения и с детектором рентгеновского излучения на трубопроводе в аксонометрии.
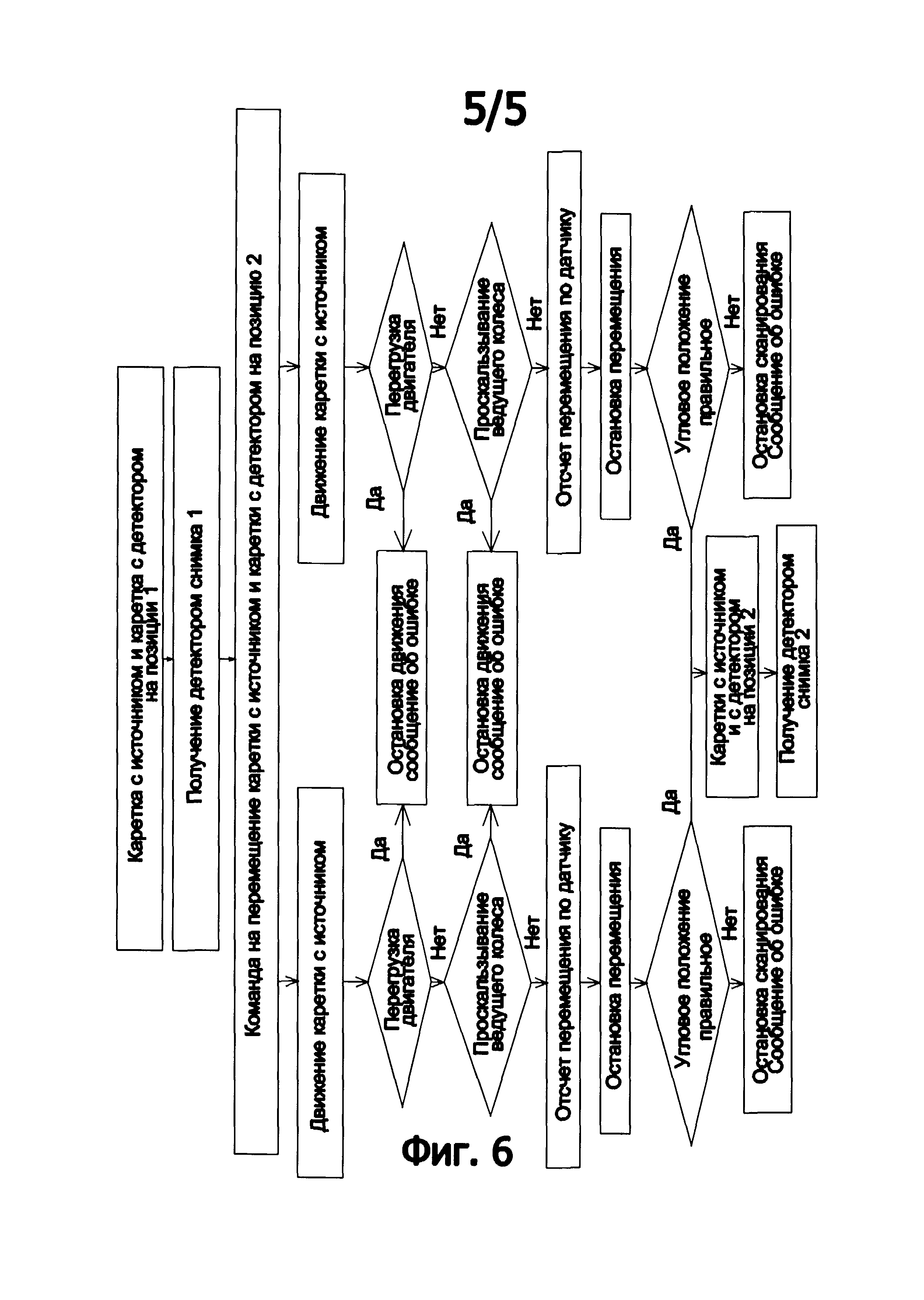
На Фиг. 6 приведена блок схема выполнения команд при съемке и перемещении кареток.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Система пошагового контроля кольцевого шва трубопровода 1 (Фиг. 1, Фиг. 5) включает направляющий пояс 2 с боковой поверхностью 3, на котором устанавливается каретка 4 с источником 5 рентгеновского излучения и каретка 6 с плоскопанельным детектором 7 рентгеновского излучения. Каждая из кареток 4, 6 снабжена двигателем 8, обеспечивающим передвижение каретки с оптимальной скоростью. Каждая из кареток содержит, по меньшей мере, одно ведущее 9 колесо и три ведомых 10, 11 колеса с ребордами. На Фиг. 2 показан вид снизу каретки 6 с детектором 7 рентгеновского излучения. На каретке имеется ведущее колесо 9, два ведомые колеса 10 и ведомое колесо 11 с окнами 12 прерывания по периметру ведомого колеса 11 (в данном случае оно также мерное колесо). У периметра колеса 11 с окнами прерывания 12 размещен собственно датчик 13 перемещения (Фиг. 3). В данном случае датчик 13 перемещения каретки содержит индуктивный датчик, обеспечивающий формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения колеса 11. На основании этих данных и определяется перемещение кареток 4 и 6 по направляющему поясу 2.
Поверхность 14 ведущего колеса 9, взаимодействующая с боковой поверхностью 3 направляющего пояса 2 может содержать рифление для снижения проскальзывания ведущего колеса 9.
На Фиг. 4 показана система пошагового контроля в которой каретка 4 с источником 5 рентгеновского излучения находится в процессе установки на направляющем поясе 2, колеса, еще не сведены и не закреплены на боковых поверхностях 3 направляющего пояса 2 с помощью прижимных рычагов 17. На данном рисунке показан вариант выполнения каретки 4 с двумя ведущими колесами 9 и с двумя двигателями 8. Такое выполнение каретки 4 с источником 5 рентгеновского излучения может потребоваться ввиду большого веса источника 5 рентгеновского излучения.
Каждая из кареток снабжена автономным блоком 15 питания, обеспечивающим передвижение каретки и работу блоков и устройств, установленных на каретке. Блок питания 5 источника рентгеновского излучения, ввиду того, что он обеспечивает достаточно большую мощность для питания источника рентгеновского излучения, может быть выполнен отдельно, установлен вне системы и соединен с источником 5 рентгеновского излучения гибким кабелем.
Каждая из кареток 4 и 6 также снабжена датчиком угла наклона к горизонту (на фигурах не показан). В качестве датчика угла наклона может быть использован инклинометр, в частности с акселерометром. Кроме того, каждая из кареток снабжена блоком управления движением каретки и блоком передачи сигналов (на рисунках не показаны) между каретками 4 и 6. Блок управления движением каретки на основе сигналов датчика перемещения каретки и датчика угла наклона. Каретка 6 детектора 7 рентгеновского излучения включает блок хранения радиографических снимков (на фигурах не показан) участков кольцевого шва 16.
Система пошагового контроля кольцевого шва 16 трубопровода 1 также содержит пульт управления системой для оператора. С пульта можно дистанционно включить систему и остановить действие системы при возникновении нештатных ситуаций.
Работа системы осуществляется следующим образом. Первоначально оператор устанавливает направляющий пояс 2 на поверхности трубопровода 1. Первоначально каретка 4, и каретка 6 устанавливаются в положение, когда источник 5 рентгеновского излучения и плоскопараллельный детектор 7 рентгеновского излучения устанавливаются в горизонтальной плоскости пересечения центра трубопровода. На направляющий пояс 2 устанавливают каретку 4 с источником 5 рентгеновского излучения и перемещают в исходное положение на оборотной стороне трубопровода 1. При этом точность установления каретки 4 с источником 5 рентгеновского излучения контролируется с использованием сигналов датчика 13 перемещения и датчика угла наклона блоком управления каретки 4. Далее на направляющий пояс 2 устанавливают каретку 6 с плоскопараллельным детектором 7 рентгеновского излучения. Положение каретки 6 корректируется блоком управления данной каретки на основании датчика угла наклона (на фигурах не показан).
Далее оператор отходит от системы, чтобы не подвергаться влиянию рентгеновского излучения и включает источник 5 рентгеновского излучения и детектор 7 рентгеновского излучения. Каретка 4 с источником 5 рентгеновского излучения и каретка 6 с плоскопараллельным детектором 7 рентгеновского излучения пошагово по заданной программе передвигаются вдоль кольцевого сварного шва 16 по направляющему поясу 2.
Последовательность действий системы иллюстрируется блок схемой выполнения команд при съемке и перемещении кареток (Фиг. 6). Каретка 4 с источником 5 рентгеновского излучения и каретка 6 с плоскопараллельным детектором 7 рентгеновского излучения находятся в исходной позиции. Производится первый снимок. Далее подается команда блоками управления кареток на их перемещение. Движение каретки 4 с источником 5 рентгеновского излучения и каретка 6 с плоскопараллельным детектором 7 рентгеновского излучения производится независимо на определенное для данного размера трубы расстояние. При этом каретки могут двигаться с разной скоростью. Каретка 4 с источником 5 рентгеновского излучения может двигаться медленнее, чтобы обеспечить надежное перемещение каретки 4 с источником 5 рентгеновского излучения, ввиду того что источник рентгеновского излучения 5 имеет большой вес.
Блок управления движением и блок передачи сигналов установленные на каждой каретке обеспечивают согласованное движение кареток, путем обмена данными по беспроводному каналу связи. Блок управления, который управляет движением кареток находится на каретке с детектором. На каждой из кареток установлены приемники/передатчики, предназначенные для осуществления беспроводной связи между каретками. Приемник/передатчик также установлен в ручном пульте управления движением кареток.
При этом блок управления, установленный на каждой каретке 4 и 5 контролирует, нет ли перегрузки двигателя, которая может возникнуть при остановке каретки из-за препятствия или схода с направляющих. Контролируется в блоке управления каждой каретки также проскальзывание ведущих колес на основании данных датчика 13 перемещения и датчика угла наклона к горизонту, что может привести к повреждению направляющего пояса 2 и к рассогласованию положений источника 5 рентгеновского излучения и плоскопараллельного детектора 7 рентгеновского излучения.
В этих случаях система сигнализирует оператору о неисправности, которая им устраняется.
Блок управления каждой каретки отсчитывает перемещение с помощью датчика перемещения 13. Далее следует остановка движения. И если угловое положение правильное, каретки на позиции два, что проверяется с помощью датчиков угла наклона к горизонту, производится снимок детектором рентгеновского излучения. Снимок сделанный на позиции два, как и снимок на позиции один помещается в блок хранения радиографических снимков участков кольцевого шва. Далее каретка 4 с источником 5 рентгеновского излучения и каретка 6 с плоскопараллельным детектором 7 рентгеновского излучения передвигаются с позиции на позицию. На каждой позиции производится съемка участка кольцевого сварного шва 16 трубопровода 1 плоскопараллельным детектором 7 рентгеновского излучения.
При этом радиографические снимки отдельных участков сварного шва могут быть автоматически сохранены в энергонезависимой памяти, считаны во внешнюю память (USB-накопитель) и переписаны оператором. Данные также могут передаваться во внешнее устройство оператора в режиме реального времени, при наличии беспроводной связи между системой и внешним устройством.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Предложенная система предназначена для проведения радиационного контроля кольцевых сварных соединений труб большого диаметра в ходе строительства или ремонта трубопроводов в трассовых или цеховых условиях. Система позволяет упростить контроль сварных швов трубопроводов за счет небольшого веса системы, удобства ее установки и использования даже в трудных условиях эксплуатации. При этом надежность и качество контроля не снижается, потому что съемка производится без искажений, потому что съемка производится пошагово в статическом состоянии детектора и излучателя, снимки производятся с перекрытием рядом расположенных участков сварного шва.
Способ радиографического контроля швов трубопровода
Электропроводящая полимерная композиция для 3d-печати
Способ радиографического контроля швов трубопровода
Способ лечения детей, оперированных по поводу гидронефроза

