Результат интеллектуальной деятельности: СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ КОРРЕКТИРОВКИ СКОРОСТИ АВТОМОБИЛЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится, в общем, к способам и системам калибровки скорости автомобиля.
Уровень техники/Раскрытие изобретения
Скорость автомобиля, отображаемая с помощью автомобильного спидометра, могут определять контроллером на основе числа оборотов колеса, указываемого датчиком частоты вращения колеса, расположенным на каждом колесе автомобиля, за заданный период времени. Расстояние, пройденное за один оборот колеса, изменяется на основе размера колеса (например, диаметра), при этом расстояние, пройденное за один оборот колеса, увеличивается при увеличении размера колеса. Размер колеса известен изготовителю автомобиля во время сборки автомобиля, и поэтому расчет скорости автомобиля может быть предварительно откалиброван на основе известного размера колеса.
В соответствии с федеральным законом, точность скорости автомобиля должна быть в пределах 2.5% от фактической скорости автомобиля. Точность расчета скорости автомобиля зависит от точности датчиков частоты вращения колеса. Тем не менее, датчики частоты вращения колеса чувствительны к ухудшению характеристик и старению, что может снизить точность. Кроме того, установка других колес в автомобиль, которые могут быть другого размера, изменение давления в шинах, и другие факторы могут снизить точность скорости автомобиля, которая не будет находиться в пределах 2.5% от фактической скорости автомобиля, даже если датчики частоты вращения колеса будут точными.
Другие попытки устранения неточности скорости автомобиля содержат использование данных глобальной системы позиционирования (GPS) для определения расстояния, пройденного автомобилем за время, что дает скорость автомобиля, для перекалибровки расчета скорости автомобиля. Один из примерных подходов показан Вуртом (Wurth) и др. в патентном документе US 7,460,950 В2. В нем, используют данные GPS для создания эталонной скорости автомобиля, которую сравнивают с оцененной скоростью автомобиля (рассчитанной по данным датчиков частоты вращения колеса), и используют для генерации скорректированной скорости автомобиля.
Тем не менее, авторы настоящего изобретения признают потенциальные проблемы, связанные с такими системами. В качестве одного из примеров, данные GPS слишком неточны, чтобы надежно определить скорость автомобиля с точностью до 2,5%. Например, на точность GPS могут влиять такие факторы, как атмосферные явления, закрытый небосклон и качество приемника GPS. Данные GPS также менее надежны при более низких скоростях из-за ошибок в определении изменения положения.
В одном из примеров, вышеописанные проблемы могут быть решены с помощью способа для корректировки рассчитанного значения скорости автомобиля в соответствии с распознаванием символов изображения с бортовой камеры автомобиля, причем изображение содержит внешний по отношению к автомобилю источник измерения скорости. Например, рассчитанное значение скорости автомобиля может быть основано на выходном сигнале датчиков частоты вращения колеса автомобиля, а источником измерения скорости может быть радиолокационный знак скорости. Таким образом, может быть получена точная скорость автомобиля.
В качестве одного из примеров, автомобиль, оснащенный бортовой камерой и радиолокационной системой, может распознавать дорожные знаки, такие как радиолокационный знак скорости, через модуль распознавания изображений. Значение, отображаемое на радиолокационном знаке скорости, может быть определено из изображения, полученного с помощью бортовой камеры и использоваться в качестве независимого измерения скорости автомобиля (например, в качестве эталонной скорости). Кроме того, значение, отображаемое на радиолокационном знаке скорости, может быть использовано для определения компенсации, которую нужно применить к скорости автомобиля, рассчитанной с использованием датчиков частоты вращения колеса автомобиля, для повышения точности рассчитанной скорости автомобиля. Повышение точности скорости автомобиля может улучшить работу автомобиля и оградить водителя автомобиля от получения штрафов за нарушение правил дорожного движения из-за нарушений ограничения скорости. Кроме того, раскрытый в настоящем документе способ может также использоваться автономными автомобилями для проверки и корректировки скорости автомобиля.
Следует понимать, что вышеприведенное краткое раскрытие служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого уникально определен формулой изобретения, приведенной после осуществления изобретения. Кроме того, заявленный объект изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
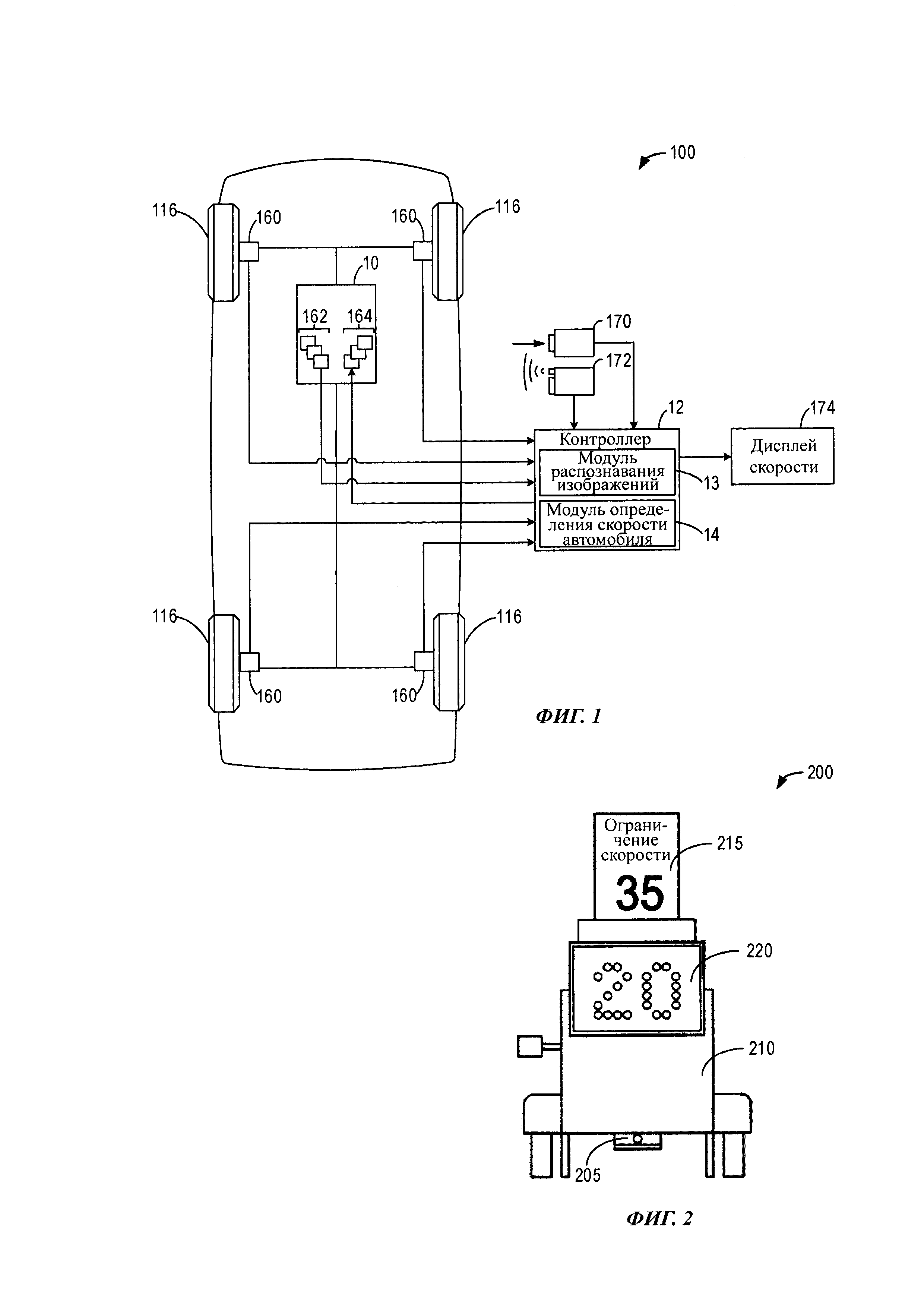
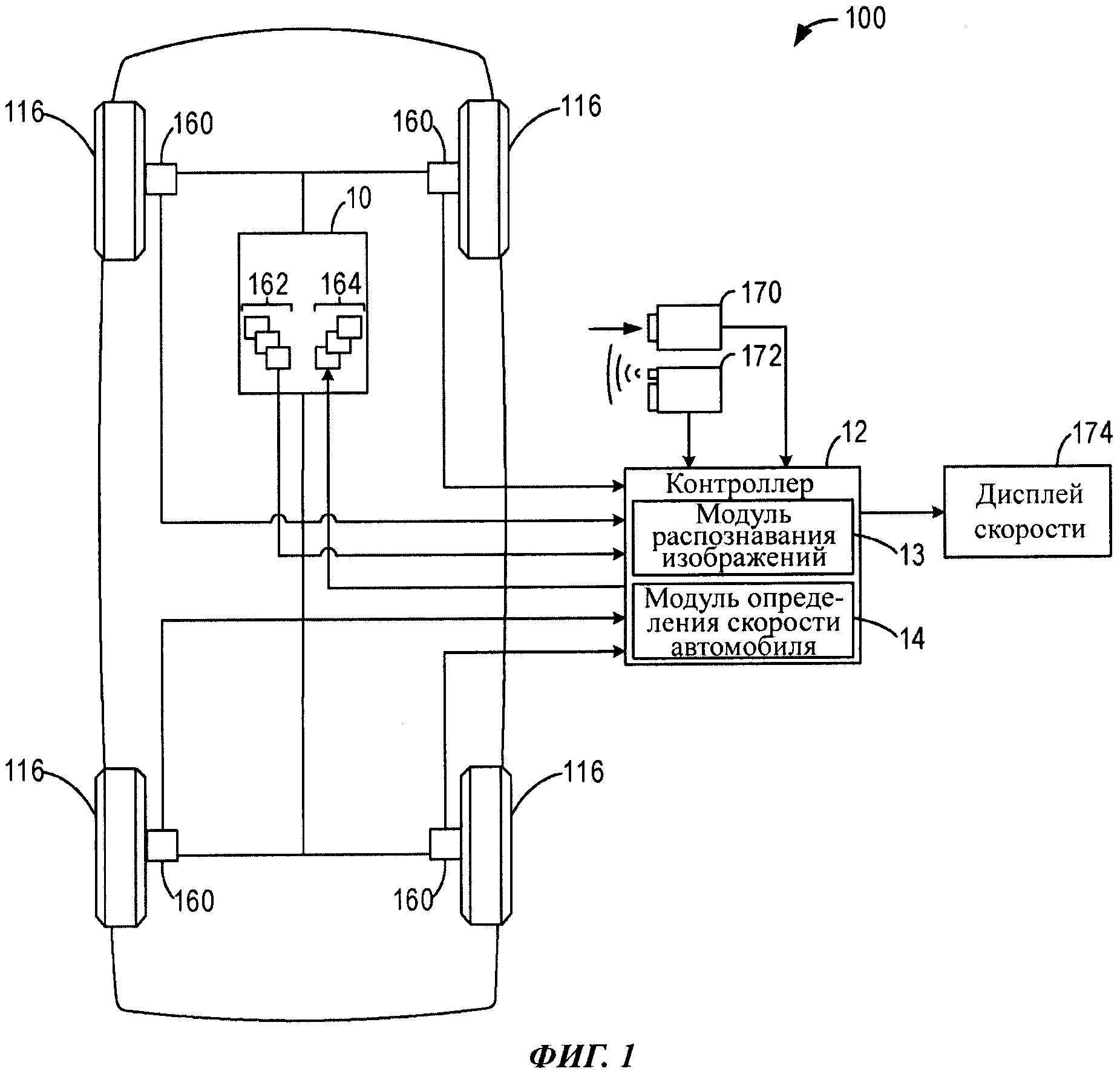
На фиг. 1 показано схематическое изображение примерной системы автомобиля;
На фиг. 2 показан пример радиолокационного знака скорости;
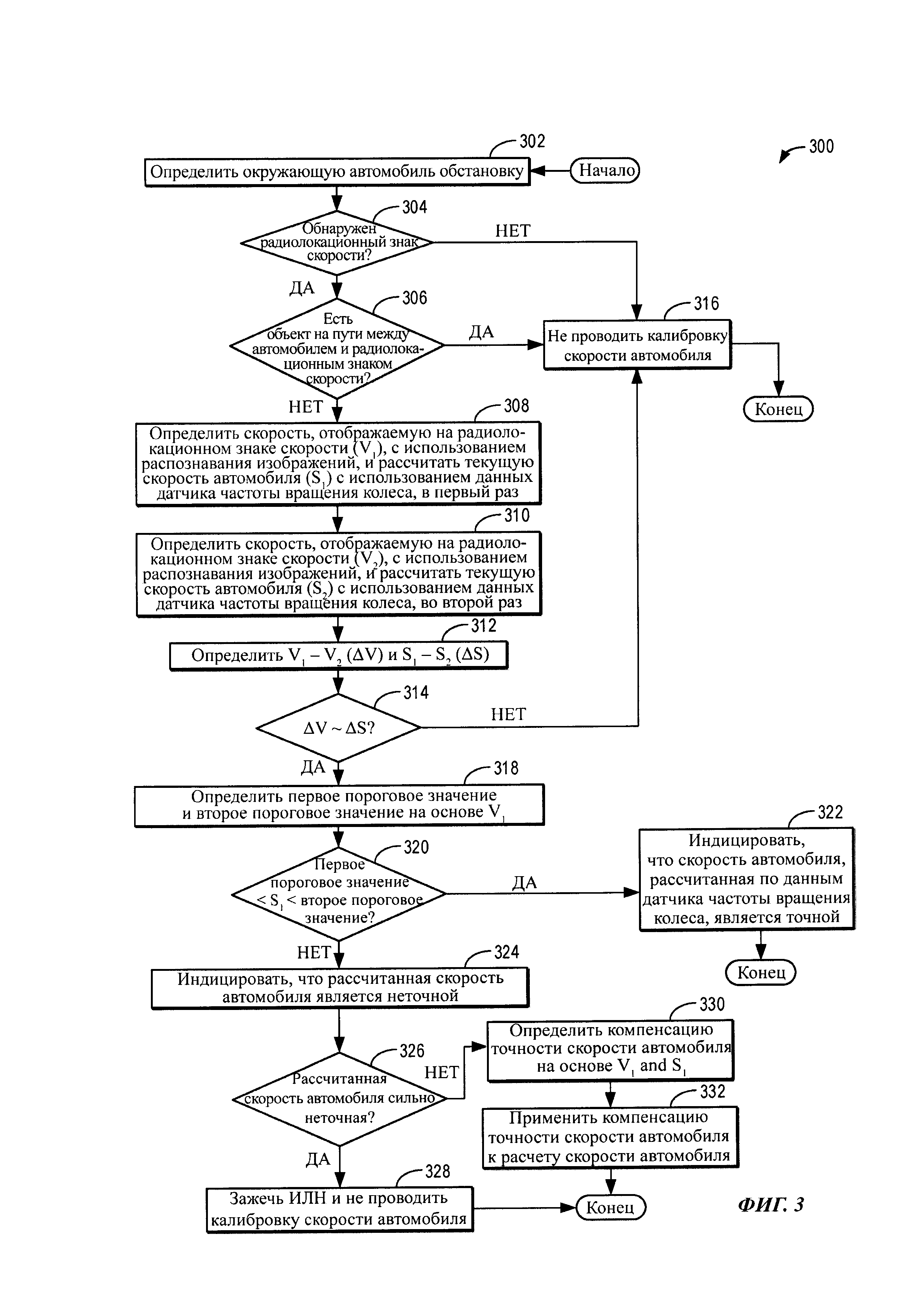
На фиг. 3 показана блок-схема примерного способа проверки рассчитанной скорости автомобиля по скорости, определенной радиолокационным знаком скорости и применения компенсации точности скорости автомобиля к рассчитанной скорости автомобиля, если рассчитанная скорость автомобиля является неточной.
Осуществление изобретения
Настоящее изобретение относится к системам и способам повышения точности скорости автомобиля, отображаемой в автомобиле, таком как примерный автомобиль, показанный на фиг. 1. Автомобиль может распознавать радиолокационный знак скорости, такой как примерный радиолокационный знак скорости, показанный на фиг. 2, используя бортовую камеру и модуль распознавания изображений. Автомобиль может сравнивать значение скорости, отображаемое на радиолокационном знаке скорости, с рассчитанной скоростью автомобиля (например, используя выходной сигнал датчика частоты вращения колеса) и определять компенсацию для применения к рассчитанной скорости автомобиля, например, в соответствии со способом, показанным на фиг. 3.
Рассмотрим фиг. 1, где изображена примерная система автомобиля 100. Автомобиль 100 содержит двигатель 10 внутреннего сгорания, выполненный в качестве двигателя для приведения автомобиля в движение. Двигатель 10 может содержать множество цилиндров и может управляться, по меньшей мере, частично с помощью системы управления, содержащей контроллер 12. Автомобиль 100 может дополнительно содержать множество колес 116, каждое из которых имеет датчик 160 частоты вращения колеса. Датчики 160 частоты вращения колеса могут использовать для обеспечения индикации текущей частоты вращения колеса одного или нескольких колес 116 автомобиля. Каждый датчик 160 частоты вращения колеса измеряет частоту вращения (например, число оборотов за время) одного из колес 116 и передает измеренное значение контроллеру 12.
Автомобиль 100 может также содержать бортовую камеру 170 и радиолокационную систему 172. В одном неограничивающем примере, бортовая камера 170 и радиолокационная система 172 могут быть расположены вблизи передней части автомобиля 100 и направлены в прямом направлении движения таким образом, чтобы обнаруживать и определять объекты на пути автомобиля, как дополнительно раскрыто ниже.
Показано, что контроллер 12 принимает информацию от множества датчиков 162 и посылает сигналы управления на множество исполнительных механизмов 164. В качестве одного из примеров, контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от связанных с двигателем 10 датчиков, среди которых можно назвать: показание температуры охлаждающей жидкости двигателя (ТОЖД) от датчика температуры, измерение давления воздуха в коллекторе (ДВК) от датчика давления, связанного с впускным коллектором двигателя; положение коленчатого вала от датчика на эффекте Холла (или датчика иного типа), связанного с коленчатым валом двигателя, из которого может быть получена частота вращения двигателя (ЧВД), измерение массы воздуха, поступающего в двигатель от датчика массового расхода воздуха (МРВ); и измерение положения дросселя от датчика положения дросселя (ПД). Другие датчики, такие как дополнительные датчики давления, температуры, воздушно-топливного отношения и состава, могут быть соединены с различными местоположениями в автомобиле 100. В качестве другого примера, исполнительные механизмы могут содержать топливные инжекторы для впрыска топлива из топливной системы, и дроссель. Кроме того, контроллер 12 может принимать данные от навигационного устройства (GPS) и/или межавтомобильной сети (V2V, от "vehicle-to-vehicle"), такой как внешняя облачная сеть.
Контроллер 12 может дополнительно принимать данные от бортовой камеры 170 и радиолокационной системы 172. Бортовая камера 170 может быть инфракрасной камерой или камерой с обнаружением красного-зеленого-синего цветов (RGB, от red-green-blue). В некоторых примерах, могут быть предусмотрены как инфракрасная камера, так и камера RBG. Радиолокационная система 172 может быть устройством определения в лазерном, радиолокационном или звуковом диапазоне. Бортовая камера 170 и радиолокационная система 172 могут содержать процессоры, сообщающиеся с контроллером 12, для передачи и/или анализа данных, полученных бортовой камерой 170 и радиолокационной системой 172. Например, бортовая камера 170 может быть запрограммирована для обнаружения присутствия другого автомобиля или объекта с использованием распознавания изображений, как дополнительно раскрыто ниже, и способов обнаружения направления движения. Аналогичным образом, радиолокационная система 172 может обеспечивать индикацию обнаруживаемого объекта, а также расстояния до объекта.
Контроллер 12 может содержать модуль 13 распознавания изображений, который имеет доступ к сохраненным изображениям/видео (например, библиотеке изображений) из одного или более из памяти контроллера и отдельной памяти, функционально связанной с контроллером 12. Модуль 13 распознавания изображений может анализировать изображения/видео, снятые бортовой камерой 170, чтобы идентифицировать один или несколько элементов в каждом изображении. Например, модуль 13 распознавания изображений может сравнивать прямое изображение бортовой камеры 170 с изображением, сохраненным в памяти для того, чтобы идентифицировать объекты в прямом изображении, такие как другие машины или дорожные знаки, в том числе радиолокационный знак скорости (такой, как радиолокационный знак 200 скорости, показанный на фиг. 2). Кроме того, модуль 13 распознавания изображений может идентифицировать символы (например, буквы и цифры) и слова.
Дополнительно или в качестве альтернативы, модуль 13 распознавания изображений может использовать модель или алгоритм, хранящиеся в памяти контроллера, такие как алгоритм определения формы, для распознавания объектов и символов. Например, модуль 13 распознавания изображений может содержать как библиотеку изображений, так и отдельные инструкции для анализа отображаемого изображения/видео отдельно от библиотеки изображений, и оба из этих подходов могут использоваться для распознавания объектов и символов. Кроме того, контроллер 12 может содержать дополнительные инструкции для использования проанализированных изображений. Например, значение скорости, определенное на основе радиолокационного знака скорости с использованием бортовой камеры 170 и модуля 13 распознавания изображений, могут сравнивать со скоростью, рассчитанной контроллером 12 с использованием модуля 14 определения скорости автомобиля, как раскрыто дальше со ссылками на фиг. 3.
Модуль 14 определения скорости автомобиля может быть размещен в контроллере 12 и может использовать выходные сигналы датчиков 160 частоты вращения колеса для расчета скорости автомобиля. Скорость автомобиля могут отображать на дисплее 174 скорости, который может содержать спидометр, чтобы информировать оператора автомобиля (например, водителя) о текущей скорости автомобиля. Дисплей 174 скорости может также содержать клавиатуру и указывающее устройство для получения ввода от водителя. Например, водитель может ввести новый размер шины или размер обода на дисплее 174 скорости при установке другого колеса или другого размера шины, что может храниться в памяти контроллера 12.
Контроллер 12 может также содержать машиночитаемый носитель данных, содержащий инструкции, которые могут исполнять для выполнения одной или нескольких процедур. Контроллер может принимать входные данные от различных датчиков, таких как раскрытые в настоящем документе, обрабатывать входные данные и приводить в действие исполнительные механизмы в соответствии с обработанными входными данными на основе инструкций или кода, запрограммированных в нем, соответствующих одной или нескольким процедурам. В одном из примеров, контроллер 12 является одиночным блоком. В другом примере, контроллер 12 может содержать множество функционально связанных блоков.
В контексте настоящего документа, термин "модуль" может содержать аппаратную и/или программную систему, которая работает для выполнения одной или нескольких функций. Например, модуль может содержать вычислительный процессор, контроллер, или другое логическое устройство, которое выполняет операции на основе инструкций, хранящихся на материальном и долговременном машиночитаемом носителе данных, таком как компьютерная память. В качестве альтернативы, модуль может содержать жестко запрограммированное устройство, которое выполняет операции на основе жесткой логики устройства. Различные модули, содержащие модуль 13 распознавания изображений и модуль 14 определения скорости автомобиля, могут представлять собой аппаратное обеспечение, которое работает на основе программных или аппаратных инструкций, программного обеспечения, которое управляет аппаратным обеспечением для выполнения операций, или их комбинации.
"Модули" могут содержать или представлять аппаратные и связанные с ними инструкции (например, программное обеспечение, хранящиеся на материальном и долговременном машиночитаемом носителе данных, таком как, жесткий диск компьютера, ПЗУ, ОЗУ или т.п.), которые выполняют одну или более операций, раскрытых в настоящем документе. Аппаратное обеспечение может содержать электронные схемы, которые содержат и/или подключены к одному или нескольким логическим устройствам, таким как микропроцессоры, процессоры, контроллеры, или т.п. Эти устройства могут быть готовыми устройствами, которые соответствующим образом запрограммированы или проинструктированы для выполнения операций, раскрытых в настоящем документе из раскрытых выше инструкций. Дополнительно или в качестве альтернативы, одно или несколько из этих устройств могут быть жестко соединены с логическими схемами для выполнения этих операций.
Теперь рассмотрим фиг. 2, где показан пример радиолокационного знака 200 скорости. Радиолокационный знак 200 скорости может быть расположен вдоль проезжей части и может содержать радиолокатор 205 для измерения скорости встречного автомобиля, корпус 210, заявленное ограничение 215 скорости для конкретной дороги или шоссе, и система 220 отображения для отображения скорости встречного автомобиля. Таким образом, радиолокационный знак скорости служит источником измерения скорости, являющимся внешним по отношению к встречному автомобилю. Скорость встречного автомобиля может отображаться в виде импульсного сигнала, обычно излучаемого светоизлучающими диодами (светодиодами), например, с частотой 80-160 Гц (Гц). Радиолокационный знак 200 скорости может располагаться на правой стороне дороги, в случае правостороннего движения, или на противоположной стороне, в случае левостороннего движения, могут быть установлены для повышения информированности о дорожном движении в таких областях, как школьные зоны и жилые районы. Радиолокационные знаки скорости, такие как радиолокационный знак 200 скорости, калибруются так, чтобы иметь точность обнаружения с небольшой погрешностью (например, 1%) и могут определять скорость встречного автомобиля в пределах диапазона 300 метров.
Теперь рассмотрим фиг. 3, где показан примерный способ 300 для определения точности рассчитанной скорости автомобиля, такого как автомобиль 100 на фиг. 1, на основе скорости, определяемой радиолокационным знаком скорости (например, радиолокационным знаком 200 скорости на фиг. 2). Кроме того, могут применять компенсацию скорости автомобиля, если рассчитанная скорость автомобиля определена как неточная. Способ 300 будет раскрыт со ссылками на системы, раскрытые и показанные на фигурах 1 и 2, хотя следует понимать, что аналогичные способы могут применяться и к другим системам, не выходя за рамки настоящего изобретения. Инструкции для выполнения способа 300 могут выполняться контроллером, таким как контроллер 12 на фиг. 1, на основе инструкций, хранящихся в памяти контроллера, и в сочетании с сигналами, полученными от датчиков автомобиля, таких как датчики, раскрытые выше со ссылками на фиг. 1 (например, датчики 160 частоты вращения колес), и могут использовать исполнительные механизмы автомобиля в соответствии со способами, раскрытыми ниже.
Способ 300 начинают в блоке 302, где определяют окружающую автомобиль обстановку. Например, могут использовать бортовую камеру (такую как бортовая камера 170 на фиг. 1) и/или радиолокационную систему (такая как радиолокационную систему 172 на фиг. 1) для определения окружающей автомобиль обстановки, такой как, расстояние до объектов и принадлежность объектов, расположенных на пути следования автомобиля. Бортовую камеру и радиолокационную систему могут активировать путем подачи питания на бортовую камеру и радиолокационную систему. В других примерах, бортовую камеру и радиолокационную систему могут активировать в соответствии с запуском двигателя (например, событием включения зажигания) и оставлять активными, когда двигатель включен. Например, бортовая камера может захватывать изображения в прямом направлении движения автомобиля.
В блоке 304, определяют, обнаружен ли радиолокационный знак скорости. Например, при использовании модуля распознавания изображений (например, модуля 13 распознавания изображений на фиг. 1), захваченные изображения могут сравнивать с изображениями из библиотеки изображений для идентификации объектов, содержащихся в захваченных изображениях. Радиолокационный знак скорости могут также обнаруживать с помощью внешнего сигнала, например, радиочастотного или микроволнового сигнала, передаваемого от радиолокационного знака скорости и принимаемого, например, антенной автомобиля.
Если радиолокационный знак скорости обнаружен, в способе 300 переходят к блоку 306. Если радиолокационный знак скорости не обнаружен, в способе 300 переходят к блоку 316, где не проводят калибровку скорости автомобиля. Таким образом, не будет определено, является ли рассчитанная скорость автомобиля точной. После блока 316, способ 300 завершают.
В блоке 306, в способе 300 определяют, находится ли объект на пути между автомобилем и радиолокационным знаком скорости. Например, объектом может быть второй автомобиль, который может быть расположен на той же полосе движения или на другой полосе многополосной дороги. Объект может быть обнаружен с помощью радиолокационной системы и/или бортовой камеры. Например, радиолокационная система может излучать сигнал и определять наличие объекта на основе возвращаемого сигнала, который отражается объектом. В другом примере, модуль распознавания изображений может сравнивать изображения, которые в настоящее время захватываются бортовой камерой, с сохраненными изображениями, чтобы определить, есть ли объект на пути между автомобилем и радиолокационным знаком скорости. Если на пути между автомобилем и радиолокационным знаком скорости есть объект, в способе 300 переходят к блоку 316, где не проводят калибровку скорости автомобиля, как раскрыто выше. Если между автомобилем и радиолокационным знаком скорости нет объекта, в способе 300 переходят к блоку 308.
В блоке 308, в способе 300 определяют скорость, отображаемую на радиолокационном знаке скорости (V1), с использованием распознавания изображений, и рассчитывают текущую скорость автомобиля (S1) с использованием данных датчиков частоты вращения колеса, в первый раз. Например, модуль распознавания изображений может анализировать изображение радиолокационного знака скорости, полученного бортовой камерой в первый раз, для определения численного значения, отображаемого системой отображения (например, системой 220 отображения на фиг. 2) радиолокационного знака скорости, который служит внешним измерением скорости. В то же время, контроллер может рассчитывать текущую скорость автомобиля в первый раз на основе выходного сигнала датчиков частоты вращения колеса с использованием модуля определения скорости автомобиля (например, модуля 14 определения скорости автомобиля на фиг. 1). Таким образом, V1 соответствует первому значению скорости, отображаемому на радиолокационном знаке скорости, a S1 соответствует первой скорости автомобиля, рассчитанной с использованием модуля определения скорости автомобиля. Кроме того, контроллер может также выполнять проверку достоверности значений V1 and S1. Например, контроллер может сравнивать V1, and S1 и определять, находятся ли числа в пределах заданного диапазона друг от друга, например, в пределах 20 миль в час (миль/ч) друг от друга. Если значения не находятся в заданном диапазоне друг от друга, контроллер может отклонить V1 и задержать калибровку скорости автомобиля. Если значения находятся в пределах заданного диапазона, эти значения могут сохранить в памяти контроллера.
В блоке 310, в способе 300 определяют скорость, отображаемую на радиолокационном знаке скорости (V2), с использованием распознавания изображений, и рассчитывают текущую скорость автомобиля (S2) с использованием данных датчиков частоты вращения колеса во второй раз, как раскрыто выше. Например, второй раз может быть заданной продолжительностью (например, 3 секунды) после первого раза. Таким образом, V2 соответствует второму значению скорости, отображаемому на радиолокационном знаке скорости, a S2 соответствует второй скорости автомобиля, рассчитанной с использованием модуля определения скорости автомобиля. Кроме того, V1 and S1 соответствуют согласованным по времени значениям скорости, определяемым с помощью двух независимых средств в первый раз, a V2 and S2 соответствуют согласованным по времени значениям скорости, определяемым с помощью двух независимых средств во второй раз. Кроме того, контроллер может выполнять проверку достоверности, как это раскрыто выше в блоке 308, для определения того, находятся ли V2 and S2 в пределах заданного диапазона. Если оба значения находятся в пределах заданного диапазона, эти значения могут сохранять в памяти контроллера.
В блоке 312, в способе 300 определяют разность между V1 и V2 (ΔV) и разность между S1 и S2 (ΔS). Таким образом ΔV соответствует изменению скорости, измеренной радиолокационным знаком скорости за период времени, a ΔS соответствует изменению скорости, рассчитанной с использованием модуля определения скорости автомобиля за период времени.
В блоке 314, определяют, является ли ΔV приблизительно равным ΔS. Например, если скорость автомобиля, рассчитанная с использованием модуля определения скорости автомобиля, увеличивается на 5 миль/ч (например, ΔS=5), ожидают, что скорость, измеренная с помощью радиолокационного знака скорости, также увеличится на 5 миль/ч (например, ΔV ~ 5), даже если значения, измеренные с помощью радиолокационного знака скорости, не идентичны значениям, определенным с использованием модуля определения скорости автомобиля. В другом примере, если скорость автомобиля не меняется, то ожидают, что как ΔV, так и ΔS будут равны нулю. Следовательно, при определении того, что ΔV приблизительно равно ΔS, определяют, что ΔS находится в пределах заданного порогового значения ΔV. Сравнение ΔV и ΔS может гарантировать, что радиолокационный знак скорости обновляется в зависимости от изменения скорости автомобиля (например, радиолокационный знак скорости является исправно фунционирующим). В качестве другого примера, могут использовать инерциальный измерительный блок (ИИБ, англ. IMU от "inertial measurement unit") или акселерометр автомобиля для определения события ускорения или торможения, которые затем могут использовать для подтверждения AV.
Если ΔV не является приблизительно равным ΔS (или информации от ИИБ или акселерометра автомобиля), в способе 300 переходят к блоку 316, и не проводят калибровку скорости автомобиля, как раскрыто выше. Если ΔV является приблизительно равным ΔS, в способе 300 переходят к блоку 318, где определяют первое пороговое значение и второе пороговое значение на основе V1. Первое пороговое значение и второе пороговое значение определяют пороговый диапазон, в котором рассчитанная скорость автомобиля считают точной. Первое пороговое значение соответствует более низкой скорости (например, меньше V1 на определенный процент), а второе пороговое значение соответствует более высокой скорости (например, больше V1 на определенный процент). В одном из неограничивающих примеров, первое пороговое значение может быть равно скорости, которая на 2.5% меньше V1, а второе пороговое значение может быть равно скорости, которая на 2.5% больше V1, таким образом, что любая скорость между первым и вторым пороговыми значениями будет находится в пределах 2.5% от V1. Кроме того, поскольку радиолокационные знаки скорости откалиброваны с высокой точностью, могут предполагать, что V1 равна действительной скорости автомобиля в первый раз, и ее поэтому используют в качестве эталонной скорости.
В блоке 320, в способе 300 определяют, является ли S1 больше первого порогового значения и меньше второго порогового значения. Если S1, скорость автомобиля, рассчитанная с использованием модуля определения скорости автомобиля в первый раз, больше первого порогового значения и меньше второго порогового значения, в способе 300 переходят к блоку 322, где индицируют, что скорость автомобиля, рассчитанная по данным датчиков частоты вращения колеса, является точной. Таким образом, подтверждают скорость автомобиля, и контроллер может продолжать использовать выходной сигнал датчиков частоты вращения колеса и модуль определения скорости автомобиля для расчета скорости автомобиля без изменений. После блока 322, способ 300 завершают.
Если S1 не больше первого порогового значения и меньше второго порогового значения (например, вне пределов порогового диапазона), в способе 300 переходят к блоку 324, где индицируют, что рассчитанная скорость автомобиля является неточной. В соответствии с индикацией того, что скорость автомобиля является неточной, контроллер может скорректировать рассчитанную скорость автомобиля, как раскрыто ниже.
В блоке 326, в способе 300 определяют, является ли рассчитанная скорость автомобиля сильно неточной (например, рассчитанная скорость автомобиля находится вне пределов порогового диапазона, определенного первым и вторым пороговыми значениями, больше чем на заданный процент). Например, рассчитанную скорость автомобиля могут считать сильно неточной, если ошибка выше той, которую контроллер может исправить. Если определяют, что рассчитанная скорость автомобиля является сильно неточной, в способе 300 переходят к блоку 328, где загорается индикаторная лампа неисправности (ИЛН, англ. MIL от "malfunction indicator lamp") и не проводят калибровку скорости автомобиля. Например, лампа ИЛН может предупреждать водителя о проведении обслуживания автомобиля и может дополнительно указывать на причину загорания лампы ИЛН.
Если не определяют, что рассчитанная скорость автомобиля является неточной, в способе 300 переходят к блоку 330, где определяют компенсацию точности скорости автомобиля на основе V1 and S1. Например, для расчета компенсации точности скорости автомобиля могут применять алгоритм исправления ошибок. В другом примере, контроллер может обращаться к справочной таблице с V1 (эталонная скорость автомобиля) и S1 (определенная скорость автомобиля) в качестве входов и компенсацией точности скорости автомобиля в качестве выхода.
В блоке 328, в способе 300 применяют компенсацию точности скорости автомобиля к расчету скорости автомобиля. Компенсация точности скорости автомобиля служит для коррекции скорости автомобиля, рассчитанной по выходному сигналу датчиков частоты вращения колеса, и ее могут применять в модуле определения скорости автомобиля во время расчета скорости автомобиля для получения скорректированной скорости автомобиля. Скорректированную скорость автомобиля могут отображать водителю автомобиля, например, с помощью спидометра (например, дисплея 174 скорости на фиг. 1). Кроме того, если скорректированная скорость автомобиля не равна требуемой скорости автомобиля (например, выбранной водителем с использованием круиз-контроля или контроллером в автономном автомобиле), контроллер может регулировать мощность двигателя, на основе разницы между требуемой скоростью автомобиля и скорректированной скоростью автомобиля. Например, контроллер может обращаться к справочной таблице с разницей между требуемой скоростью автомобиля и скорректированной скоростью автомобиля в качестве входа и изменением выходной мощности двигателя в качестве выхода. Затем контроллер может регулировать рабочие параметры двигателя, такие как воздушно-топливное отношение, чтобы получить данное изменение выходной мощности. После блока 328, способ 300 завершают.
Таким образом, определенную скорость автомобиля (например, рассчитанную с использованием выходного сигнала от датчиков частоты вращения колеса и модуля определения скорости автомобиля) подтверждают или корректируют, если определили, что она неточная, на основе эталонной скорости, полученной от внешнего источника измерения (например, радиолокационного знака скорости). Таким образом, повышают точность скорости, отображаемой водителю. Кроме того, скорость автомобиля могут калибровать без обслуживания автомобиля.
Технический эффект определения точности рассчитанной скорости автомобиля с использованием эталонной скорости, измеренной с помощью радиолокационного знака скорости, и применения компенсации к расчету скорости состоит в том, что скорость, отображаемая водителю автомобиля, является скорректированной.
В одном из примерных способов, корректируют рассчитанное значение скорости автомобиля в соответствии с распознаванием символов изображения с бортовой камеры автомобиля, причем изображение содержит внешний по отношению к автомобилю источник измерения скорости. В предыдущем примере, дополнительно или опционально, указанное рассчитанное значение скорости автомобиля основано на выходном сигнале датчиков частоты вращения колеса, расположенных в автомобиле для измерения частоты вращения колес автомобиля. В любом или во всех из предыдущих примеров, дополнительно или опционально, источником измерения скорости является радиолокационный знак скорости. В любом или во всех из предыдущих примеров, дополнительно или опционально, в способе дополнительно управляют выходной мощностью двигателя, приводящего автомобиль в движение, частично на основе скорректированного рассчитанного значения скорости автомобиля. В любом или во всех из предыдущих примеров, дополнительно или опционально, выходной мощностью двигателя управляют для достижения требуемой скорости автомобиля частично на основе разности между требуемой скоростью автомобиля и скорректированным рассчитанным значением скорости автомобиля. В любом или во всех из предыдущих примеров, дополнительно или опционально, при корректировке рассчитанного значения скорости автомобиля корректируют скорость, отображаемую на спидометре автомобиля.
В другом примерном способе, определяют скорость автомобиля частично на основе выходного сигнала датчиков, расположенных на борту автомобиля; определяют эталонную скорость автомобиля частично на основе бортового распознавания символов источника измерения скорости, внешнего по отношению к автомобилю; и корректируют определенную скорость автомобиля, когда определенная скорость автомобиля находится вне пределов порогового диапазона, образованного от определенной эталонной скорости. В предыдущем примере, дополнительно или опционально, скорость автомобиля определяют с использованием модуля определения скорости автомобиля и выходного сигнала датчиков частоты вращения колеса, а эталонную скорость определяют по радиолокационному знаку скорости, при этом радиолокационный знак скорости идентифицируют с использованием бортовой камеры автомобиля и модуля распознавания изображений. В любом или во всех из предыдущих примеров, дополнительно или опционально, пороговый диапазон определяют с помощью первого, более низкого порогового значения и второго, более высокого порогового значения, причем первое пороговое значение на определенный процент ниже определенной эталонной скорости, а второе пороговое значение на определенный процент выше определенной эталонной скорости. В любом или во всех из предыдущих примеров, дополнительно или опционально, при корректировке определенной скорости автомобиля определяют компенсацию скорости автомобиля на основе определенной скорости автомобиля и определенной эталонной скорости и применяют компенсацию скорости автомобиля к определенной скорости автомобиля для получения скорректированной скорости автомобиля. В любом или во всех из предыдущих примеров, дополнительно или опционально, скорректированную скорость автомобиля отображают на спидометре автомобиля. В любом или во всех из предыдущих примеров, дополнительно или опционально, пороговый диапазон получают из определенной эталонной скорости в соответствии с индикацией того, что внешний по отношению к автомобилю источник измерения скорости является исправно функционирующим. В любом или во всех из предыдущих примеров, дополнительно или опционально, при определении того, что внешний по отношению к автомобилю источник измерения скорости является исправно функционирующим, индицируют отсутствие какого-либо объекта между автомобилем и внешним по отношению к автомобилю источником измерения скорости на основе данных от одного или более из бортовой камеры и бортовой радиолокационной системы. В любом или во всех из предыдущих примеров, дополнительно или опционально, при определении того, что внешний по отношению к автомобилю источник измерения скорости является исправно функционирующим, определяют изменение скорости автомобиля за период времени; определяют изменение эталонной скорости за период времени; и индицируют, что внешний по отношению к автомобилю источник измерения скорости является исправно функционирующим в соответствии с тем, что изменение скорости находится в пределах заданного порога изменения эталонной скорости.
В еще одном примере, система для автомобиля содержит двигатель, выполненный с возможностью приведения автомобиля в движение; множество колес; датчики частоты вращения колеса, выполненные с возможностью измерения числа оборотов за время для каждого из колес; камеру; радиолокационную систему; спидометр; и контроллер, хранящий в долговременной памяти инструкции, при исполнении которых контроллер выполнен с возможностью: принимать изображения, захваченные камерой, и определять внешнее измерение скорости в изображениях с использованием модуля распознавания изображений; рассчитывать скорость автомобиля с использованием модуля определения скорости автомобиля и выходного сигнала от датчиков частоты вращения колеса; и применять компенсацию скорости автомобиля в модуле определения скорости автомобиля в соответствии с тем, что рассчитанную скорость автомобиля определяют как неточную, для получения скорректированной скорости автомобиля. В предыдущем примере, дополнительно или опционально, при определении внешнего измерения скорости в изображениях, дополнительно определяют отсутствие какого-либо объекта между автомобилем и источником внешнего измерения скорости на основе данных от радиолокационной системы. В предыдущем примере, дополнительно или опционально, рассчитанную скорость автомобиля определяют как неточную в соответствии с тем, что рассчитанная скорость автомобиля находится вне пределов порогового диапазона, определенного на основе внешнего измерения скорости, причем рассчитанная скорость автомобиля и внешнее измерение скорости являются согласованными по времени значениями скорости. В предыдущем примере, дополнительно или опционально, компенсацию скорости автомобиля определяют из разности рассчитанной скорости автомобиля и внешнего измерения скорости. В предыдущем примере, дополнительно или опционально, скорректированную скорость автомобиля отображают на спидометре. В предыдущем примере, дополнительно или опционально, контроллер дополнительно хранит в долговременной памяти инструкции, при исполнении которых контроллер выполнен с возможностью: регулировать выходную мощность двигателя в соответствии с тем, что рассчитанную скорость автомобиля определяют как отличающуюся от требуемой скорости автомобиля.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и выполняться системой управления, содержащей контроллер в сочетании с различными датчиками, исполнительными механизмами, и другим оборудованием двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, где указанные действия выполняются путем исполнения инструкций в системе, содержащей различные компоненты оборудования двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на "один" элемент или "первый" элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
Способ управления двигателем в состоянии простоя, способ управления транспортным средством, включающим двигатель, и система транспортного средства
Способ управления работой двигателя (варианты) и система двигателя
Способ диагностики двигателя, имеющего клапан для управления разбавлением впускаемого воздуха (варианты)
Способ (варианты) и система для регулировки воздушно-топливного отношения
Двигатель внутреннего сгорания с наддувом и способ эксплуатации такого двигателя
Способ управления двигателем (варианты) и система двигателя
Способ эксплуатации двигателя (варианты) и система двигателя
Способ управления двигателем в ответ на преждевременное воспламенение (варианты)
Способ управления нагревательным устройством датчика твердых частиц (варианты), система и способ регенерации датчика твердых частиц
Двигатель внутреннего сгорания с жидкостным охлаждением и способ его эсксплуатации
Способ и система для оценки рециркуляции отработавших газов с помощью датчика кислорода в отработавших газах
Способ (варианты) и система для определения влажности воздуха и наличия потока из картера посредством датчика выхлопного газа
Способ (варианты) и система для оценки внешнего давления при помощи кислородного датчика
Способ (варианты) и система для регулирования подачи топлива в двигатель и крутящего момента
Способ (варианты) и система регулирования мощности нагрева кислородного датчика для уменьшения его деградации под действием воды
Способ (варианты) и система для регулирования впрыска воды в двигатель
Способ обеспечения измерения влажности
Способ определения содержания этанола в топливе при помощи датчика кислорода (варианты)
Выявление потемнения элемента датчика кислорода
Способ (варианты) и система для расчета воздушно-топливного отношения посредством кислородного датчика переменного напряжения

