Результат интеллектуальной деятельности: Способ управления беспилотным планирующим летательным аппаратом на траекториях с изменениями направлений движения в заданных опорных точках
Вид РИД
Изобретение
Изобретение относится к области наведения беспилотных планирующих летательных аппаратов (БПЛА) и может быть использовано при создании и эксплуатации таких летательных аппаратов.
Наиболее близким к данному изобретению является «Способ управления беспилотным планирующим летательным аппаратом» (RU 2654238, 2018), базирующийся на следующих основных положениях:
1. БПЛА движется в высоких слоях атмосферы, обладает возможностью автономного управления величиной и направлением аэродинамической подъемной силы путем целенаправленного изменения угла аэродинамического крена ϕ и угла атаки α.
2. Управление БПЛА заключается в последовательном наведении на каждую из совокупности опорных точек траектории Mj (j=1, …, N), заданной геодезическими координатами Bj, Lj, Hj, и направлениями их пролета, заданными углами азимута Aj и наклона к местным горизонтам θj.
3. Наведение БПЛА осуществляется с использованием терминального метода наведения «по требуемому ускорению», который включает решение краевой задачи наведения с целью определения требуемого ускорения, обеспечивающего перевод БПЛА из текущего положения в требуемое конечное, задаваемое в каждой очередной опорной точке траектории.
Предполагается, что текущие навигационные параметры БПЛА определяются в относительной геоцентрической гринвичской прямоугольной системе координат Oξηζ, в которой ось Oξ направлена к северу по оси вращения Земли, ось Оη в плоскости экватора пересекает Гринвичский меридиан, ось Oζ дополняет систему до правой.
4. В качестве целевой системы координат, в которой формулируется и решается краевая задача, выбирается сопровождающая системы координат Scxcyczc с началом на радиус-векторе центра масс БПЛА в точке Sc, высота которой постоянна и равна высоте очередной точки наведения. Ось Scyc системы Scxcyczc направлена вдоль радиус-вектора  от центра масс БПЛА - точки S; ось Sczc - по нормали к плоскости Пс, образуемой двумя радиус - векторами
от центра масс БПЛА - точки S; ось Sczc - по нормали к плоскости Пс, образуемой двумя радиус - векторами  и
и  , исходящими из центра Земли. Ось Scxc дополняет целевую систему координат до правой.
, исходящими из центра Земли. Ось Scxc дополняет целевую систему координат до правой.
Уравнения движения БПЛА в краевой задаче наведения интегрируются при следующих краевых условиях:
на левом конце: 
на правом конце: 
В формуле (1) у=H(t)-Hj, а проекции вектора скорости на оси системы координат Scxcyczc определяются по формуле:
где матрица направляющих косинусов, связывающая относительную геоцентрическую гринвичскую систему координат с текущей сопровождающей системой координат, определяется в каждом цикле наведения в виде:
где 
 - центральный угол между векторами
- центральный угол между векторами  и
и  .
.
5. Решение краевой задачи в аналитическом виде в способе-аналоге получено при допущении о постоянстве ускорения силы притяжения и незначительности влияния вращения Земли на непрерывно уменьшающемся участке наведения, а также при представлении требуемого кажущегося ускорения в форме простой интегрируемой функции - временного полинома первого порядка:

Полученные в результате решения краевой задачи проекции кажущегося ускорения на оси сопровождающей системы координат Scxcyczc имеют вид:


6. Требуемое значение угла аэродинамического крена рассчитывается по формуле:

Требуемое значение угла атаки αmp определяется после определения требуемого значения коэффициента подъемной аэродинамической силы из выражения  с помощью таблиц, представляющих зависимость коэффициента
с помощью таблиц, представляющих зависимость коэффициента  от высоты Н, числа Маха М и угла атаки:
от высоты Н, числа Маха М и угла атаки:

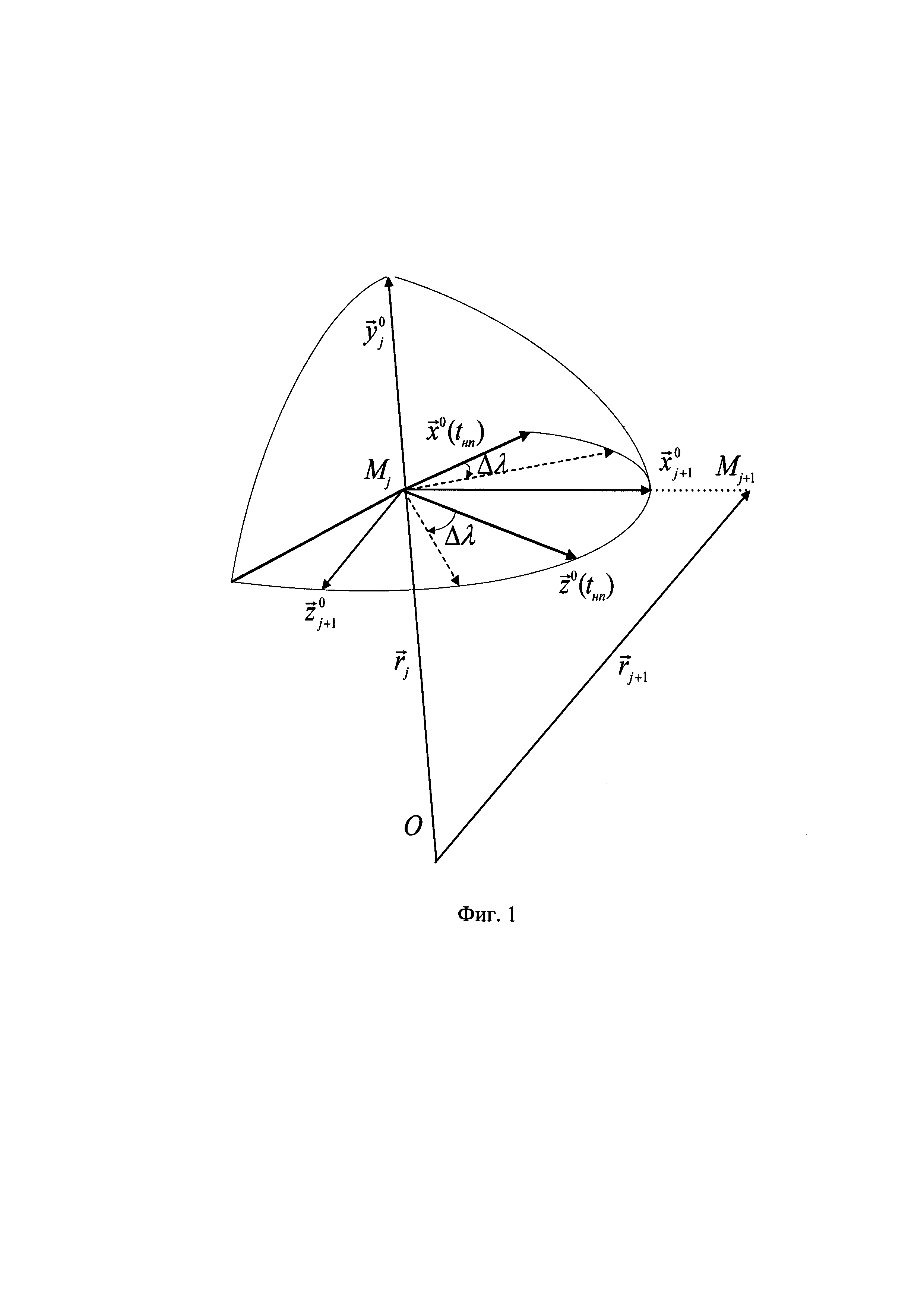
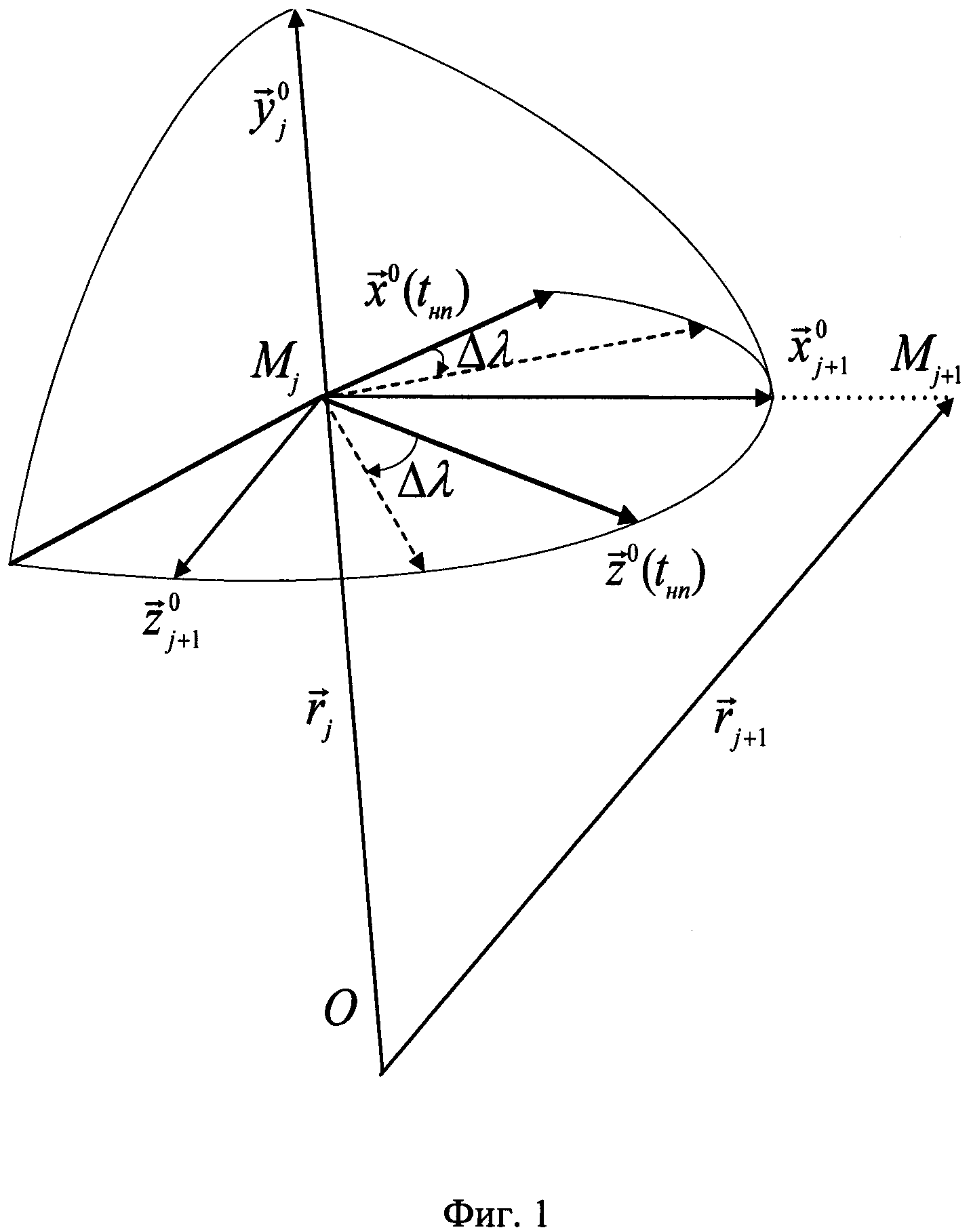
Недостатком способа-аналога является то, что при изменении направления движения БПЛА на следующую опорную точку Mj+1 в новой сопровождающей системе координат на этапе разворота траектории в краевой задаче наведения существенно возрастают величины краевых условий на левом конце траектории - значения параметров Vz,y,Vy (см. фиг. 1) и, как следствие, возрастают значения требуемых ускорений (см. формулы (6), (7)), возрастают углы атаки αmp и крена ϕmp (см. формулы (8) и (9)), а следствием увеличения угла атаки является возрастание аэродинамической силы лобового сопротивления и потери скорости БПЛА.
Задачей предлагаемого изобретения является внесение в бортовой алгоритм наведения БПЛА изменений, которые позволят существенно снизить потери скорости БПЛА при изменениях направлений движения.
Технический результат достигается тем, что краевую задачу наведения БПЛА на каждую очередную опорную точку траектории в каждом цикле наведения формулируют и решают в сопровождающей системе координат с началом на текущем радиус-векторе центра масс БПЛА на высоте, равной высоте следующей опорной точки траектории, а при сближении с точкой наведения до расстояния, потребного на разворот в новое направление движения, краевую задачу наведения формулируют и решают в прямоугольной целевой системе координат с началом в точке наведения, горизонтально расположенные оси которой в каждом цикле наведения по определенному алгоритму разворачивают в горизонтальной плоскости на малые углы вплоть до окончания разворота траектории БПЛА в направлении движения на очередную опорную точку.
Расстояние, потребное на разворот в новое направление движения, в угловой мере определено численными экспериментами для всех траекторий БПЛА равным 1 градусу центрального угла (из центра Земли) между текущим радиус-вектором и радиус-вектором точки наведения.
В силу малости изменений ориентации целевой системы координат Mjxyz и относительной близости БПЛА к точке наведения значения краевых условий и, соответственно, требуемых поперечных ускорений и углов атаки будут малыми. Соответственно и потери скорости БПЛА от сопротивления атмосферы будут малыми.
Сущность изобретения поясняется приведенным ниже описанием, фигурой 1 и подтверждается примером моделирования траектории БПЛА при реализации ближайшего способа и предложенного способа управления в таблицах 1, 2.
Суть предлагаемого способа управления БПЛА заключается в том, что как и в ближайшем аналоге, наведение БПЛА на каждую опорную точку осуществляется с определением управляющих параметров в сопровождающей системе координат Scxcyczc, а с определенного расстояния до опорной точки, с которого начинается разворот траектории в направлении на следующую опорную точку, расчет управляющих параметров осуществляется в целевой системе координат Mjxyz с началом в опорной точке, а горизонтально расположенные оси в каждом цикле наведения разворачиваются на малые углы в сторону следующей опорной точки (фиг. 1).
Алгоритм наведения БПЛА с разворотом траектории на следующую опорную точку включает:
1. Задание начальной ориентации целевой системы координат Mjxyz ортами  , вычисляемыми в базовой системе координат Oξηζ:
, вычисляемыми в базовой системе координат Oξηζ:

где  - радиус-вектор БПЛА на момент начала разворота tнn.
- радиус-вектор БПЛА на момент начала разворота tнn.
2. Задание разворота осей осей Mjz и Mjx относительно вертикальной оси Mjy на малый угол Δλ:
а) вычисление вектора

где  - единичный вектор, определяемый выражением:
- единичный вектор, определяемый выражением:

где  ,
,  - радиус-векторы опорных точек Mj и Mj+l,
- радиус-векторы опорных точек Mj и Mj+l,
Фj,j+1 - угловая дальность между опорными точками;
б) определение числа малых поворотов осей Mjz и Mjx, на которые делится полный угол разворота осей:

где ΔТцн - продолжительность цикла наведения, k - коэффициент кратности;
Т - прогнозируемое время полета БПЛА до опорной точки, определяемое по приближенной формуле:

в) определение положения орта  после поворота на угол Δλ:
после поворота на угол Δλ:

где  - малое изменение вектора
- малое изменение вектора  , соответствующее его повороту в горизонтальной плоскости на угол Δλ;
, соответствующее его повороту в горизонтальной плоскости на угол Δλ;
г) определение нового положения орта  :
:

3. Формирование краевых условий задачи наведения с разворотом наточку Mj+1 в системе координат Mjxyz:
на левом конце -  ,
,
на правом конце -  ,
,
где 
а элементы матрицы Mx←ξ определяются составляющими ее ортов:

где 
4. Решение краевой задачи с определением требуемых поперечных ускорений на момент t+ΔТцн/2 в виде:


5. Определение требуемых значений управляющих параметров - угла атаки αmp и угла аэродинамического крена ϕmp - осуществляется так же как при решении краевой задачи в сопровождающей системе координат, т.е. по формулам (8) и (9).
Малые значения величин αmp и ϕmp на участках разворота траектории при смене направлений движения обеспечивают малые потери скорости от сопротивления атмосферы,  дальности полета и
дальности полета и  скорости БПЛА в конечной точке траектории.
скорости БПЛА в конечной точке траектории.
Результаты сравнительного моделирования полета БПЛА с применением разработанного способа управления БПЛА и способа управления, описанного в аналоге [1], представлены в таблицах 1, 2.
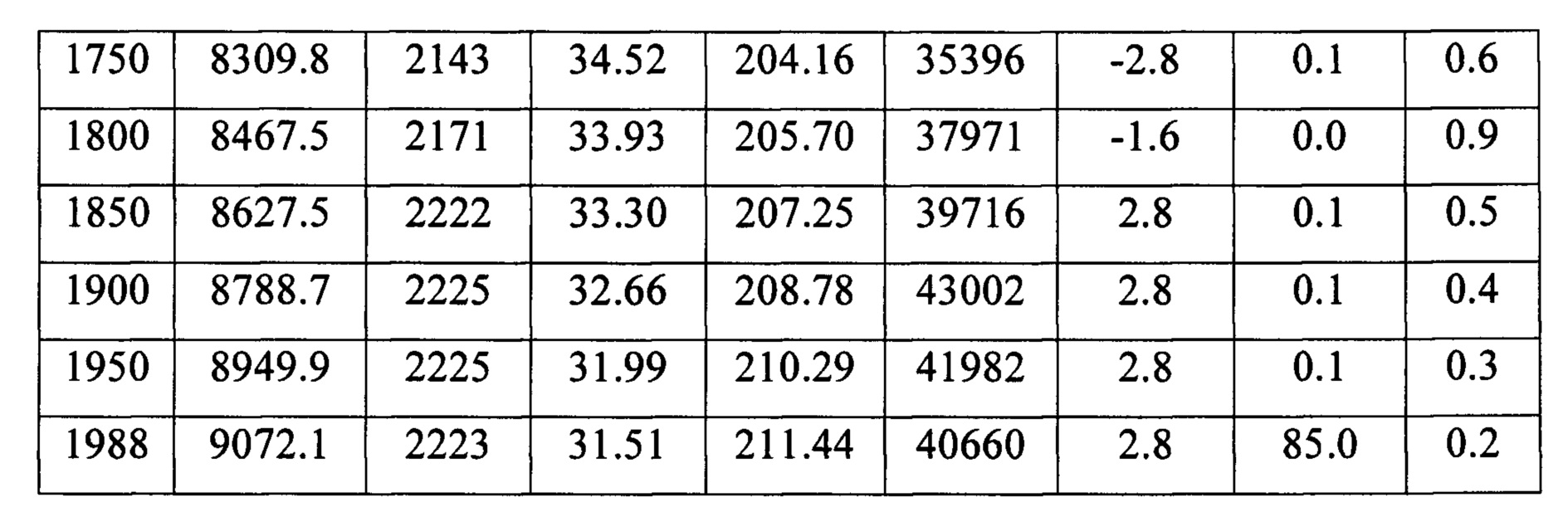
Таблица 1
Результаты моделирования движения БПЛА при предложенном способе управления
Обозначения: D - полная сферическая дальность полета, V - скорость полета БПЛА, В - геодезическая широта, L - геодезическая долгота, Н - высота полета, α - угол атаки, ϕ - угол аэродинамического крена, Nпоп - поперечная перегрузка.

Устройство для диагностического контроля выполнения проверок
Способ прогнозной оценки эффективности многоэтапных процессов
Способ активной радиомаскировки радиоэлектронных средств станциями активных помех и устройство для его реализации
Способ противодействия оптико-электронной разведке
Переносной беспилотный летательный аппарат многоцелевого назначения
Способ калибровки сейсмографов
Передающая адаптивная антенная решетка
Топливо для гиперзвукового прямоточного воздушно-реактивного двигателя
Устройство симметрирования напряжения сети при обрыве двух любых фаз
Устройство диагностики силового масляного трансформатора
Способ формирования маневров произвольной конфигурации на конечном участке траектории планирующего беспилотного летательного аппарата
Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа
Способ управления беспилотным планирующим летательным аппаратом
Способ получения вероятностной оценки возможности преодоления зон поражения зенитных управляемых ракет маневрирующим беспилотным летательным аппаратом

