Результат интеллектуальной деятельности: Способ определения поперечных размеров цели по данным двух разнесенных позиций в многопозиционных РЛС с учетом их поляризационно-рассеивающих свойств
Вид РИД
Изобретение
Изобретение относится к локационной технике, а именно к способам построения обнаружителей сигналов в многопозиционных радиолокационных системах.
Известно устройство радиолокационного распознавания воздушных объектов, состоящее из последовательно соединенных блока обработки радиолокационной информации, формирователя доплеровских портретов, классификатора первого уровня и классификатора второго уровня, три входа которого соединены с тремя выходами классификатора первого уровня, а выход является выходом всего устройства, отличающееся тем, что в него введены последовательно соединенные со вторым выходом блока обработки радиолокационной информации вычислитель модуля трассовой скорости и пороговое устройство, выход которого соединен со вторым входом классификатора первого уровня, и формирователь эталонных данных, выход которого соединен с третьим входом классификатора первого уровня.
Известен триангуляционный способ построения двумерного радиолокационного изображения воздушной цели в РЛС с инверсным апертурным синтезом и узкополосным зондирующим сигналом. Изобретение относится к радиолокации и может быть использовано для повышения качества распознавания воздушных целей. Цель изобретения - повысить точность построения радиолокационного изображения, чем снизит ошибки распознавания целей. Для этого предлагается анализировать структуру доплеровских портретов цели, полученных при изменении ракурса локации на 0,5°. На основе анализа расчетным путем определяются координаты локальных рассеивателей поверхности цели в системе координат, связанной с центром сопровождения цели. Способ инвариантен к положению и изменению доплеровской частоты центра сопровождения цели, а также лишен множества ошибок построения изображения, связанных с различными допущениями, принятыми в прототипе [1].
Известно устройство радиолокационного распознавания воздушных объектов, состоящее из последовательно соединенных блока обработки радиолокационной информации, формирователя доплеровских портретов, классификатора первого уровня и классификатора второго уровня, а также из блока эталонных доплеровских портретов, выход которого соединен со вторым входом классификатора первого уровня, три выхода которого соединены с тремя входами классификатора второго уровня, выход которого является выходом всего устройства, отличающееся тем, что в него введены последовательно соединенные вычислитель вертикальной составляющей скорости, вычислитель трассовой скорости и параметрический классификатор, выход которого соединен с четвертым входом классификатора второго уровня, второй выход блока обработки радиолокационной информации соединен со входом вычислителя вертикальной составляющей скорости и вторым входом параметрического классификатора, а третий его выход - со вторым входом вычислителя трассовой скорости.
Известен многополяризационный способ распознавания воздушных целей. Способ предусматривает облучение летательного аппарата, выбранного для распознавания, последовательностями импульсных сигналов, в которых каждый импульс имеет определенную, отличную от других, поляризацию, прием отраженных сигналов и их анализ, позволяющий сформировать поляризационный портрет цели, используемый в качестве информативного признака распознавания [2].
Все выше перечисленные способы и устройства не учитывают преимуществ многопозиционной радиолокации. Благодаря одновременному наблюдению цели с различных направлений объем сигнальной информации в МП РЛС существенно возрастает по сравнению с однопозиционной РЛС. Измеряя амплитуду, фазу и поляризацию принятых разнесенными позициями сигналов, можно определять размеры, форму и характеристики собственного вращения цели точнее и за меньшее время.
Воспользуемся методами спектрального анализа и применим их к измерениям огибающих квадратов амплитуд сигналов, принимаемых одновременно разнесенными в пространстве РЛС или вынесенными приемными позициями на взаимно-ортогональных поляризациях. В этом случае комплексные амплитуды сигналов будут пропорциональны комплексным амплитудам поляризационной матрицы рассеяния (ПМР), которые в свою очередь зависят от ракурса наблюдения цели  . Они могут быть записаны в соответствии с выражением:
. Они могут быть записаны в соответствии с выражением:
где  - волновое число;
- волновое число;
 - координата n-го рассеивателя в продольном направлении (вдоль оси X);
- координата n-го рассеивателя в продольном направлении (вдоль оси X);
 - координата n-го рассеивателя в поперечном направлении (вдоль оси Y).
- координата n-го рассеивателя в поперечном направлении (вдоль оси Y).
Здесь и в дальнейшем  - модуль комплексного коэффициента отражения цели при излучении сигнала 1-й РЛС на j-ой поляризации и его приеме k-ой приемной позицией на i-ой поляризации (фиг. 2).
- модуль комплексного коэффициента отражения цели при излучении сигнала 1-й РЛС на j-ой поляризации и его приеме k-ой приемной позицией на i-ой поляризации (фиг. 2).
Если МП РЛС содержит одну приемо-передающую, а остальные приемные позиции, то в этом случае комплексные элементы ПМР будут описываться выражением:
где  .
.
При этом предполагалось, что ось X совпадает с линией визирования приемопередающей позиции. Если предположить, что измерения проводятся в небольшом секторе углов , то можно считать  , а
, а  . В этом случае выражения (1) и (2) примут вид:
. В этом случае выражения (1) и (2) примут вид:


где  ;
;  .
.
Интенсивности сигналов, принимаемых МП РЛС, будут пропорциональны квадратам амплитуд элементов ПМР, которые могут быть найдены с использованием выражений (3) и (4). Например, при использовании (3) можно получить:

Аналогичное выражение можно получить при использовании (4). Как видно из выражения (5), результаты измерений сигналов в МП РЛС пропорциональны суммарной эффективной поверхности рассеяния (ЭПР) всех отражающих элементов цели, а также сумме гармоник, период которых определяется разностными координатами рассеивателей в поперечном направлении, а амплитуды сигналов, отраженные рассеивателями, пропорциональны произведению амплитудных элементов.
Итак, применяя к результатам измерений интенсивностей сигналов, принятых МП РЛС на взаимно-ортогональных поляризациях, методы спектрального анализа, можно определить характеристики цели в поперечном направлении. Обычно энергетический спектр, найденный по измерениям интенсивностей сигналов, называют некогерентным «портретом» цели.
В дальнейшем энергетический спектр флуктуации интенсивностей сигналов, принятых в МП РЛС, будем называть некогерентным «портретом» (НП) цели в поперечном направлении. При этом НП цели в поперечном направлении, найденный по измерениям интенсивности сигнала на основной поляризации, будет характеризовать распределение всех, а на кроссовой - только деполяризующих рассеивателей в поперечном направлении. Однако, поскольку измерения на кроссовой поляризации производятся при отношениях сигнал/шум на (6÷10) дБ меньше, чем на основной, то информация о геометрических характеристиках, получаемая на кроссовой поляризации, будет с большими ошибками. Для уменьшения ошибок за счет низкого отношения сигнал/шум при определении поперечных размеров между деполяризующими рассеивателями цели можно использовать совместно измерения амплитуд и разности фаз сигналов, принятых в каждой приемной позиции на взаимно-ортогональных поляризациях. В этом случае в каждой приемной позиции будут измеряться комплексные амплитуды сигналов, полученные в результате перемножения комплексных амплитуд сигналов, принятых на взаимно-ортогональных поляризациях. Эти измерения будут пропорциональны произведению комплексных элементов ПМР, характеризующих рассеивающие свойства цели на основной и кроссовой поляризациях, которое может быть найдено при использовании выражений (3) или (4). Например, при использовании выражения (3) можно получить:

Аналогичное выражение можно получить и при использовании выражения (4). В (6) N обозначает количество всех рассеивателей, a  - деполяризующих. Как видно из выражения (6), измерения, полученные в результате перемножения комплексных амплитуд сигналов на взаимно-ортогональных поляризациях, принятых в каждой позиции МП РЛС, пропорциональны сумме комплексных гармоник, период которых определяется разностными координатами деполяризующих и не деполяризующих рассеивателей, а амплитуда равна произведению амплитудных элементов ПМР, характеризующих преобразование поляризации при отражении. Следовательно, применяя процедуру спектрального анализа к таким измерениям, можно получить информацию о поперечных расстояниях между парами всех рассеивателей, между парами деполяризующих, а также тех и других одновременно.
- деполяризующих. Как видно из выражения (6), измерения, полученные в результате перемножения комплексных амплитуд сигналов на взаимно-ортогональных поляризациях, принятых в каждой позиции МП РЛС, пропорциональны сумме комплексных гармоник, период которых определяется разностными координатами деполяризующих и не деполяризующих рассеивателей, а амплитуда равна произведению амплитудных элементов ПМР, характеризующих преобразование поляризации при отражении. Следовательно, применяя процедуру спектрального анализа к таким измерениям, можно получить информацию о поперечных расстояниях между парами всех рассеивателей, между парами деполяризующих, а также тех и других одновременно.
Рассмотрим случай, когда измерения интенсивностей сигналов в МП РЛС производится равнодискретно по углу в полярной системе координат с центром, совпадающим центром масс, в виде:

где  ;
;
 - квадрат амплитудного элемента ПМР, характеризующий интенсивность сигнала, принятого k-ой позицией МП РЛС на соответствующей поляризации;
- квадрат амплитудного элемента ПМР, характеризующий интенсивность сигнала, принятого k-ой позицией МП РЛС на соответствующей поляризации;
 - дельта функция;
- дельта функция;
 - количество измерений;
- количество измерений;
 - дискретность измерения по углу.
- дискретность измерения по углу.
Применяя к данным измерениям преобразование Фурье, получим:

где  - текущая координата вдоль оси
- текущая координата вдоль оси  ;
;
 - оператор обратного преобразования Фурье;
- оператор обратного преобразования Фурье;
 - спектр измерений, представленных выражением (7).
- спектр измерений, представленных выражением (7).
Для получения НП цели в поперечном направлении необходимо найти модуль функции:

В случае если необходимо определять распределение рассеивателей с учетом их деполяризующих свойств, то процедуру спектрального анализа необходимо применять к комплексным измерениям, полученным в результате перемножения комплексных амплитуд сигналов, принятых на взаимно-ортогональных поляризациях в каждой приемной позиции. Если измерения производятся равнодискретно по углу, то их можно представить в виде:

В отличие от измерений, представленных выражением (7), данные измерения являются комплексными. При этом фаза каждого измерения равна разности фаз сигналов, принятых на взаимно-ортогональных поляризациях в каждой позиции МП РЛС. Таким образом, при данном способе обработки сигналов производится дополнительный учет фазовой структуры поля, рассеянного целью без привязки по фазе приемных позиций МП РЛС между собой. Применяя к данным измерениям преобразование Фурье, получим:
где  - спектр когерентных измерений комплексных амплитуд сигналов, отраженных от цели и принятых различными приемными позициями МП РЛС на взаимно-ортогональных поляризациях, модуль которого является когерентным портретом цели в поперечном направлении;
- спектр когерентных измерений комплексных амплитуд сигналов, отраженных от цели и принятых различными приемными позициями МП РЛС на взаимно-ортогональных поляризациях, модуль которого является когерентным портретом цели в поперечном направлении;
 - оператор свертки.
- оператор свертки.
Таким образом, из выражения (11) видно, что функция  является сверткой функций
является сверткой функций  и
и  , модули которых являются когерентными портретами цели в поперечном направлении на основной и кроссовой поляризациях. Модуль функции
, модули которых являются когерентными портретами цели в поперечном направлении на основной и кроссовой поляризациях. Модуль функции  будет одновременно характеризовать распределение всех рассеивающих центров и только деполяризующих в поперечном направлении и может быть найден в соответствии с выражением:
будет одновременно характеризовать распределение всех рассеивающих центров и только деполяризующих в поперечном направлении и может быть найден в соответствии с выражением:

Однако использование преобразования для построения НП в поперечном направлении имеет ряд недостатков, которые обусловлены ограниченностью интервала измерений по углу  .
.
Применяя преобразование Фурье к участку измерений, представленных, например, в виде произведения (7) или (10), фактически находится спектр процесса, который представляется в виде произведения двух функций, вид которых показан на фиг. 3, а:

где  - функция «окна» наблюдения;
- функция «окна» наблюдения;
 - измерения, ограниченные по углу .
- измерения, ограниченные по углу .
Функция (фигура 3, г) в этом случае получается в виде свертки двух функций: 
Первая из этих функций будет определяться распределением рассеивателей в поперечном направлении полностью определяется видом функции «окна» . Аналогичные рассуждения справедливы и для функции . Например, если «окно» прямоугольное, то преобразование Фурье от него будет иметь вид (фигура 3, в):

А функции или будут представлять собой суперпозицию функций  с различными весами. При этом разрешающая способность будет определяться протяженностью данной функции по уровню 0,5 и составит
с различными весами. При этом разрешающая способность будет определяться протяженностью данной функции по уровню 0,5 и составит  при одинаковых коэффициентах отражения разрешаемых рассеивателей. Кроме того, функция
при одинаковых коэффициентах отражения разрешаемых рассеивателей. Кроме того, функция  имеет боковые лепестки, уровень первого из которых составляет - 13,6 дБ, что может приводить к маскировке отдельных рассеивателей с малыми коэффициентами отражения. С целью снижения уровня боковых лепестков возможно применение непрямоугольных «окон», например «хемминга»,
имеет боковые лепестки, уровень первого из которых составляет - 13,6 дБ, что может приводить к маскировке отдельных рассеивателей с малыми коэффициентами отражения. С целью снижения уровня боковых лепестков возможно применение непрямоугольных «окон», например «хемминга»,  и др. Но в этом случае ухудшается разрешающая способность и возникают потери, для компенсации которых необходимо увеличивать отношение сигнал/шум, а также увеличивать интервал измерений по углу.
и др. Но в этом случае ухудшается разрешающая способность и возникают потери, для компенсации которых необходимо увеличивать отношение сигнал/шум, а также увеличивать интервал измерений по углу.
Кроме того, поскольку центральный пик НП цели в поперечном направлении является максимальным из всех пиков, то и боковые лепестки, соответствующие этому пику, имеют максимальный уровень из всех остальных, что может привести к маскировке соседний пиков. Поэтому желательно исключить центральный пик из НП цели в поперечном направлении, поскольку он не несет информации о геометрических характеристиках цели. Это можно сделать, исключив постоянную составляющую из исходных измерений, в соответствии с выражением:

В этом случае НП цели в поперечном направлении будет иметь пики, соответствующие только разностным координатам рассеивателей. Аналогичные результаты могут быть получены при наличии в системе двух позиций, одна из которых приемо-передающая, а вторая - приемная. В этом случае измерения производятся последовательно во времени при наличии относительного движения цели. Вынесенная позиция при этом может быть использована для определения угловой скорости вращения цели, с целью масштабирования полученных измерений по углу и построения некогерентного портрета в поперечном направлении. Аналогичное использование двух разнесенных РЛС при проведении взаимной корреляционной обработки квадратов огибающих амплитуд принимаемых сигналов позволяет также определить скорость относительного вращения цели и использовать ее для масштабирования измерений по углу поворота цели. Одним из признаков распознавания целей может явиться их эффективная протяженность (эффективный размер) НП в поперечном направлении  , которая может быть найдена из выражения:
, которая может быть найдена из выражения:

где функция  может обозначать или нормированную функцию , описываемую выражением (8), или нормированную функцию , описываемую выражением (11);
может обозначать или нормированную функцию , описываемую выражением (8), или нормированную функцию , описываемую выражением (11);
 - нормирующий коэффициент.
- нормирующий коэффициент.
При этом эффективный размер будет характеризовать соответственно, расстояния между всеми или только деполяризующими рассеивателями, или теми и другими одновременно. Нормирующий коэффициент находится из условия:

и может быть найден в соответствии с выражением:

Воспользовавшись равенством Парсеваля, можно получить, например, для функции следующее выражение:

Аналогичное выражение можно получить и для . Если измерения представлены в равнодискретном виде, например, в виде (7) или (10), выражение для нормирующего коэффициента с учетом (20) будет иметь вид:

Для того чтобы понять физическую сущность данного признака рассмотрим простейший идеализированный пример. Предположим, что цель состоит из двух рассеивателей, расстояние между которыми в поперечном направлении равно  . Выражение, описывающее нормированный НП, можно записать в виде:
. Выражение, описывающее нормированный НП, можно записать в виде:

Квадрат эффективного размера такого идеализированного НП цели в поперечном направлении, найденного в соответствии с выражением (17), будет равен:
Таким образом, из выражения (23) видно, что квадрат эффективного размера НП цели в поперечном направлении является весовой суммой квадратов разностных координат между рассеивателями с весами, пропорциональными произведению их коэффициентов отражения на соответствующих поляризациях. Для получения выражения, которое позволяет определить эффективный размер непосредственно по измерениям вида (7), (10) воспользуемся выражением (20) и свойством преобразования Фурье:

Аналогично это свойство может быть записано и для функции . С учетом выражения (24) квадрат эффективного размера может быть найден:

Если измерения представлены в равнодискретной форме в виде (7), тогда выражения для квадрата эффективного размера может быть записано в виде:

Для получения непосредственного эффективного размера дополнительно необходимо извлечь квадратный корень. Аналогично может быть получено выражение для измерений представленных формулой (10). Можно показать, что эффективный размер определяется коэффициентом корреляции между измерениями, а также их средним значением  и дисперсий
и дисперсий  , следующим образом:
, следующим образом:
где  - коэффициент корреляции между измерениями
- коэффициент корреляции между измерениями  и сдвинутыми на один отсчет
и сдвинутыми на один отсчет  .
.
Из данного выражения можно определить диапазон измерения  . Учитывая, что
. Учитывая, что  может изменяться в пределах
может изменяться в пределах  ,
,  будет принимать значения от 0 до
будет принимать значения от 0 до  , где
, где  - интервал однозначности.
- интервал однозначности.
Следовательно, величина  будет определять эффективный размер в долях интервала однозначности.
будет определять эффективный размер в долях интервала однозначности.
Таким образом, можно сделать вывод, что эффективный размер НП цели в поперечном направлении характеризует геометрические размеры цели в поперечном направлении, а также учитывает рассеивающие свойства отдельных элементов конструкции цели. Кроме того, данный признак может быть рассчитан по измерениям, полученным в МП РЛС без существенных вычислительных затрат. Этот признак также может быть получен аналогично вышеизложенному при наличии одной приемопередающей и одной приемной позиции.
Используя полученные выше выводы, разработан способ определения распределения рассеивателей цели в поперечном направлении с учетом их поляризационно-рассеивающих свойств. Как было показано выше, отношение сигнал/шум на кроссовой поляризации существенно меньше, чем на основной. Поэтому для определения поперечных размеров с учетом размеров между деполяризующими рассеивателями целесообразно использовать произведения измерений на взаимно-ортогональных поляризациях с учетом их разности фаз.
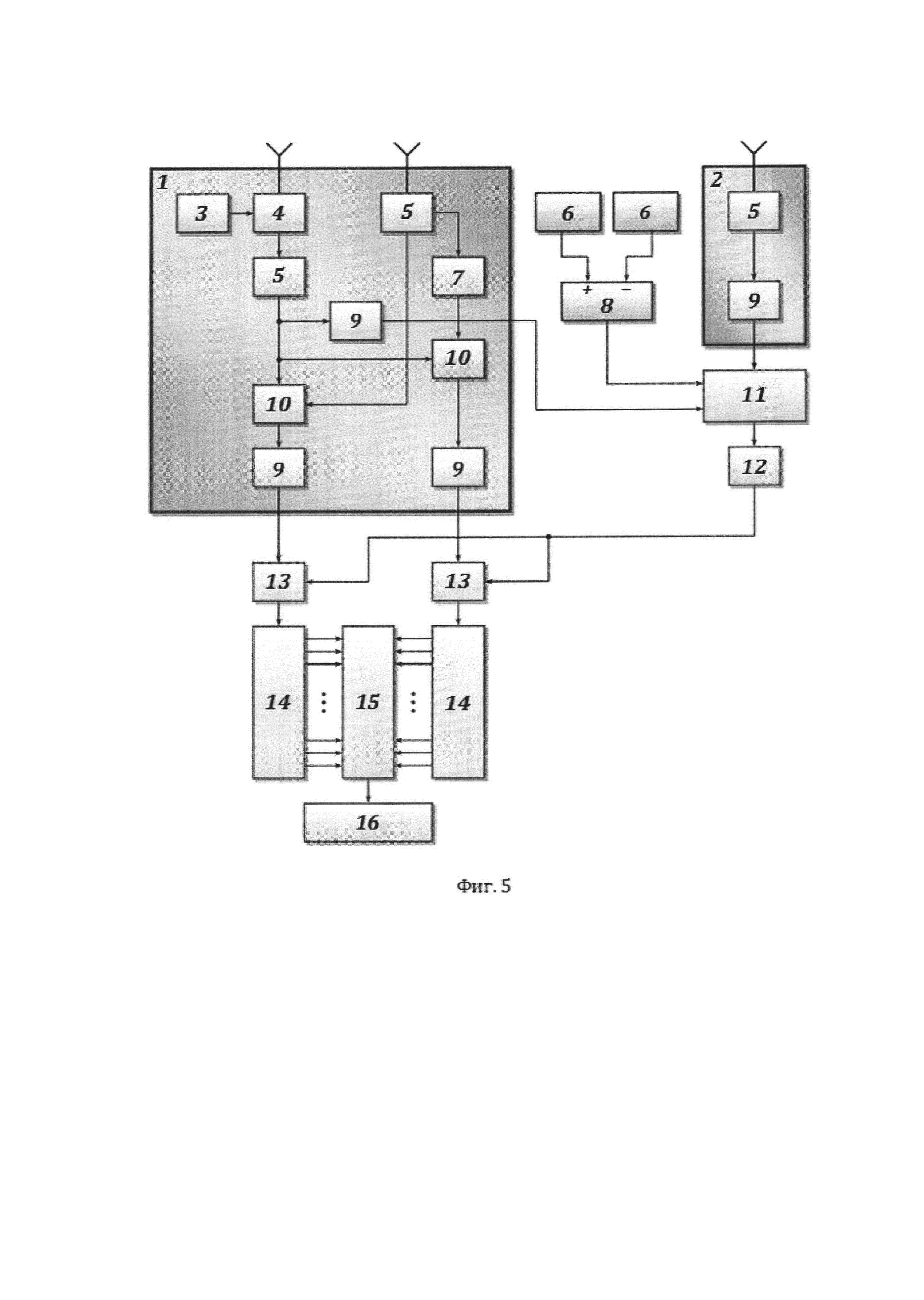
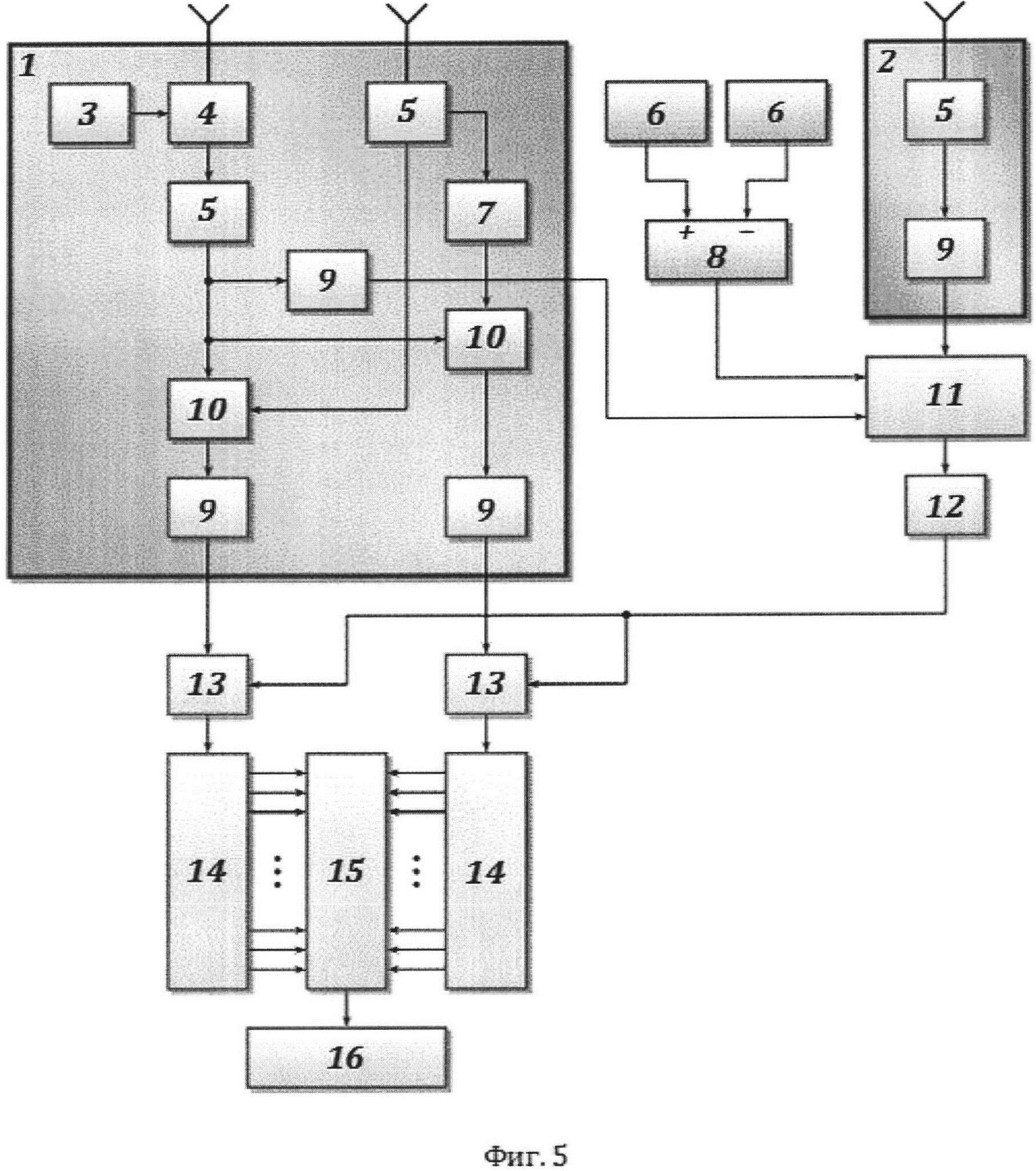
При наличии в системе РЛС только двух позиций, одна из которых приемо-передающая, а вторая только приемная, измерения производятся последовательно во времени. Это возможно только при наличии относительного движения цели. Вынесенная позиция при этом используется для определения угловой скорости вращения с целью масштабирования полученных измерений (Фиг. 5). Для реализации этого способа необходимо иметь две РЛС, одна из которых приемопередающая, а другая - только приемная. Приемо-передающая РЛС содержит схему выделения огибающей (СВО) амплитуд сигналов, принятых на основной поляризации, необходимую для работы блока определения угловой скорости вращения цели, и две схемы выделения огибающих амплитуд сигналов с выходов фазовых детекторов (ФД). Приемная РЛС содержит антенну, рассчитанную на прием сигналов основной поляризации. Порядок действий, позволяющих реализовать данный способ, следующий. По флуктуациям интенсивностей сигналов, принятых совмещенной и вынесенной приемными позициями, при использовании информации от датчиков об угловом положении (ДУП) цели, определяется угловая скорость вращения цели. В зависимости от величины угловой скорости вращения с помощью управляемого генератора импульсов (G) меняется скорость съема информации с выходов приемо-передающей РЛС. Последовательность измерений, полученных в результате опроса обоих выходов приемо-передающей РЛС, в течение некоторого времени накапливается в соответствующих накопителях. При этом на выходе накопителя формируется величины вида:

По окончании накопления полученные измерения поступают на входы фазовых преобразователей (ФП) (или любого другого анализатора спектра), который характеризует распределение как всех, так и только деполяризующих рассеивателей цели в поперечном направлении.
Предложенное изобретение иллюстрируется следующими графическими материалами:
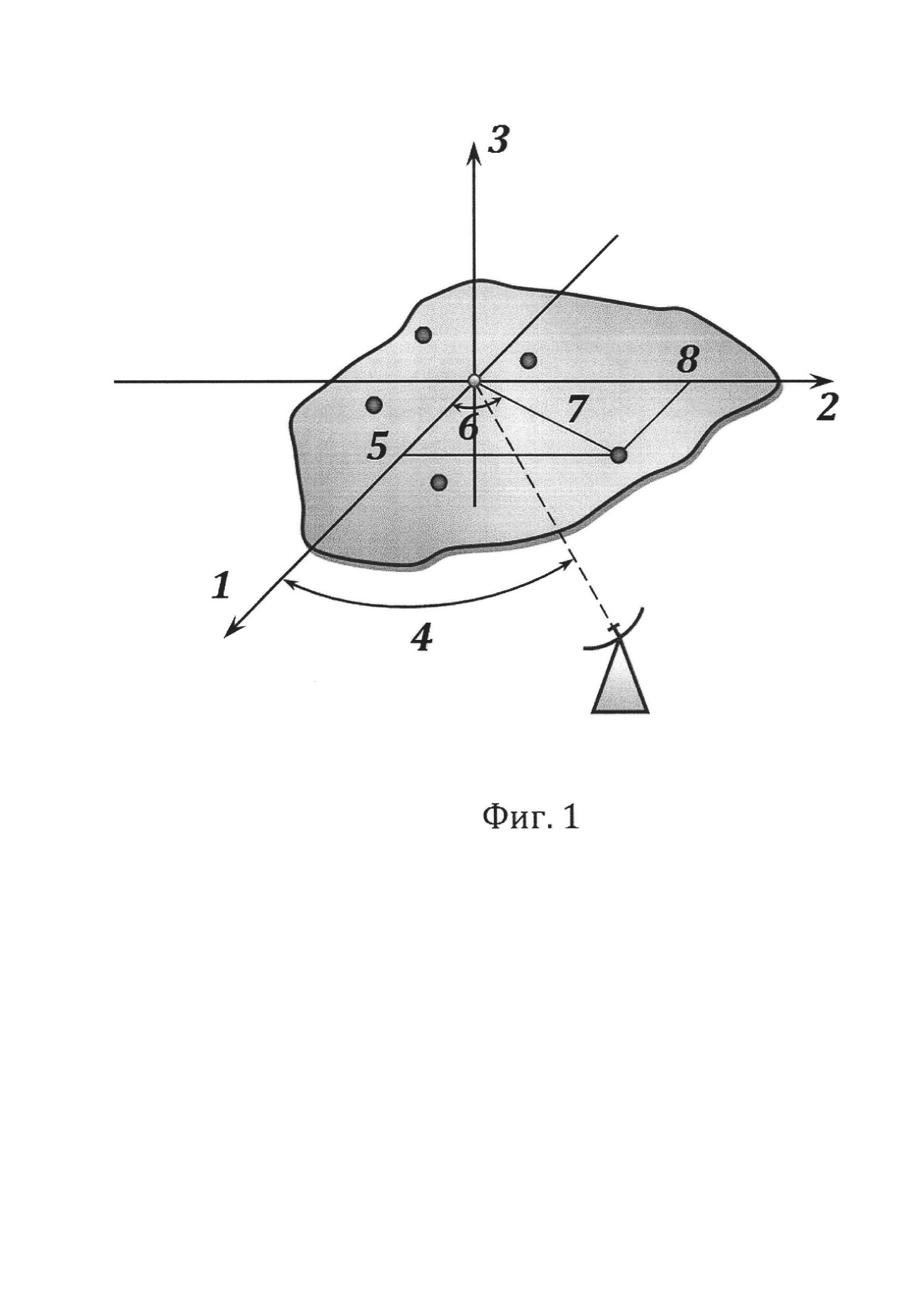
Фиг. 1 - поляризационная матрица рассеяния.
Фиг. 2 - - модуль комплексного коэффициента отражения цели при излучении сигнала 1-й РЛС на j-ой поляризации и его приеме k-ой приемной позицией на i-ой поляризации.
Фиг. 3 - некогерентный портрет, полученный по измерениям с исключенным средним значением.
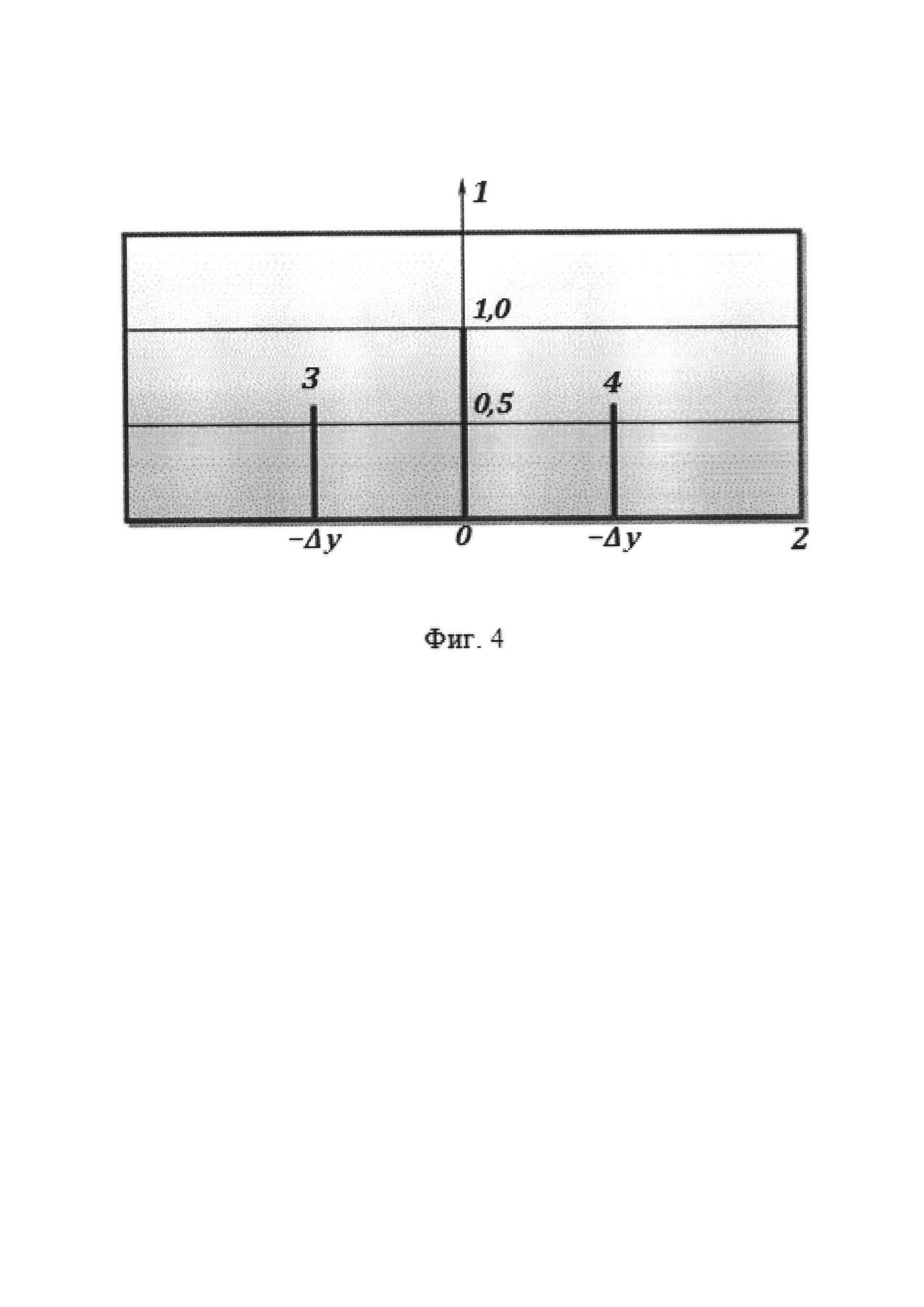
Фиг. 4 - НП цели.
Фиг. 5 - схема способа, позволяющего реализовать описанные операции.
На Фиг. 1 использовались следующие обозначения:
1 X;
2. Y;
3. Z;
4. β;
5. Xn;
6. εn;
7. ρn;
8. Yn.
На Фиг. 2 использовались следующие обозначения:
1. X;
2. Y;
3. Z;
4. m;
5. 1;
6.  ;
;
7. k;
8.  ;
;
9.  ;
;
10.  ;
;
11.  ;
;
12.  ;
;
13.  ;
;
14.  ;
;
15.  ;
;
16. βm;
17.  ;
;
18. βk.
На Фиг. 3 использовались следующие обозначения:
1.  ;
;
2.  ;
;
3.  ;
;
4.  ;
;
5.  ;
;
6.  .
.
На Фиг. 4 использовались следующие обозначения:
1.  ;
;
2. Y;
3.  ;
;
4.  .
.
На Фиг. 5 использовались следующие обозначения:
1. Приемо-передающий РЛК.
2. Приемный РЛК.
3. Передатчик.
4. Антенный переключатель.
5. Приемник.
6. Датчик об угловом положении.
7. Фазовращатель на π/2.
8. Сумматор.
9. Схема выделения огибающей.
10. Фазовый детектор.
11. Измеритель Ω.
12. Генератор.
13. Ключ.
14. Накопитель.
15. Фазовый преобразователь.
16. Индикатор.
Литература
1. RU 2099742, 1997.
2. RU 2139553, 1999.
Способ определения поперечных размеров цели по данным двух разнесенных позиций в многопозиционных РЛС с учетом их поляризационно-рассеивающих свойств, в котором по флуктуациям интенсивностей сигналов, принятых совмещенной и вынесенной приемными позициями, при использовании информации от датчиков об угловом положении (ДУП) цели определяется угловая скорость вращения цели, отличающийся тем, что в зависимости от величины угловой скорости вращения с помощью управляемого генератора импульсов (G) меняется скорость съема информации с выходов приемо-передающей РЛС, последовательность измерений, полученных в результате опроса обоих выходов приемо-передающей РЛС, в течение некоторого времени накапливается в соответствующих накопителях, по окончании накопления полученные измерения поступают на входы фазовых преобразователей, который характеризует распределение как всех, так и только деполяризующих рассеивателей цели в поперечном направлении.
Способ обнаружения опасных небесных тел, приближающихся к земле с дневного неба, и космическая система для его реализации сода-2
Способ высокоточного позиционирования аппарата на поверхности луны и устройство для его осуществления
Корреляционно-фазовый пеленгатор
Азимутальная ориентация платформы трехосного гиростабилизатора по приращениям угла прецессии гироблока
Способ определения азимута платформы трехосного гиростабилизатора по углу поворота корпуса гироблока
Устройство для моделирования двухканальных преобразователей
Корреляционное устройство
Способ измерения угловых координат солнца и реализующее его устройство
Способ и радиотехническая система идентификации летательных аппаратов
Малогабаритный передатчик повышенной энергетической скрытности
Металлоискатель на гетеродинном приемнике с использованием системы повышенной дискриминации
Устройство регулирования балластной нагрузкой аккумуляторных батарей на основе искусственной нейронечеткой сети

