Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления и способу управления электромотором.
Уровень техники
[0002] Способ управления фазой напряжения известен как один из способов управления для электромотора и т.п. В способе управления фазой напряжения, значение команды управления фазой вычисляется на основе значения команды управления крутящим моментом, и значение команды управления амплитудой вычисляется посредством использования предварительно определенной скорости модуляции. Напряжение, соответствующее значению команды управления фазой и значению команды управления амплитудой, прикладывается к электромотору. Обычно, в таком способе управления фазой напряжения, чтобы повышать точность управления вращением для электромотора, управление с обратной связью выполняется для значения команды управления фазой. Более конкретно, оцененное значение крутящего момента находится из тока, протекающего в электромотор, и значение команды управления фазой управляется таким образом, что отклонение между значением команды управления крутящим моментом и оцененным значением крутящего момента уменьшается (JP 2013-137129 A).
Сущность изобретения
[0003] При управлении с обратной связью, ток, протекающий в электромотор, измеряется сначала, и значение команды управления фазой управляется на основе измеренного тока. Такое управление с обратной связью основано на измеренном значении тока, так что скорость отклика не является достаточно высокой. Например, когда шум возникает в токе, протекающем в электромотор, шум не уменьшается, а усиливается, так что управление вращением может становиться нестабильным.
[0004] Задача настоящего изобретения заключается в том, чтобы стабильно выполнять управление вращением для электромотора.
[0005] Согласно одному варианту осуществления настоящего изобретения, способ управления электромотором настоящего изобретения представляет собой способ управления электромотором для управления, посредством управления фазой напряжения, приложенным напряжением, прикладываемым к электромотору через инвертор. Способ управления включает в себя: этап вычисления значений команд управления фазой для вычисления значения команды управления фазой, которое должно использоваться для управления фазой напряжения посредством управления с прямой связью, на основе значения команды управления крутящим моментом в электромотор; этап вычисления значений команд управления амплитудой для вычисления значения команды управления амплитудой, которое должно использоваться для управления фазой напряжения, на основе напряжения приведения в действие для инвертора; этап вычисления значений команд управления напряжением для вычисления значения команды управления напряжением в электромотор на основе значения команды управления фазой и значения команды управления амплитудой; и этап приложения напряжения для приложения приложенного напряжения из инвертора к электромотору на основе значения команды управления напряжением.
Краткое описание чертежей
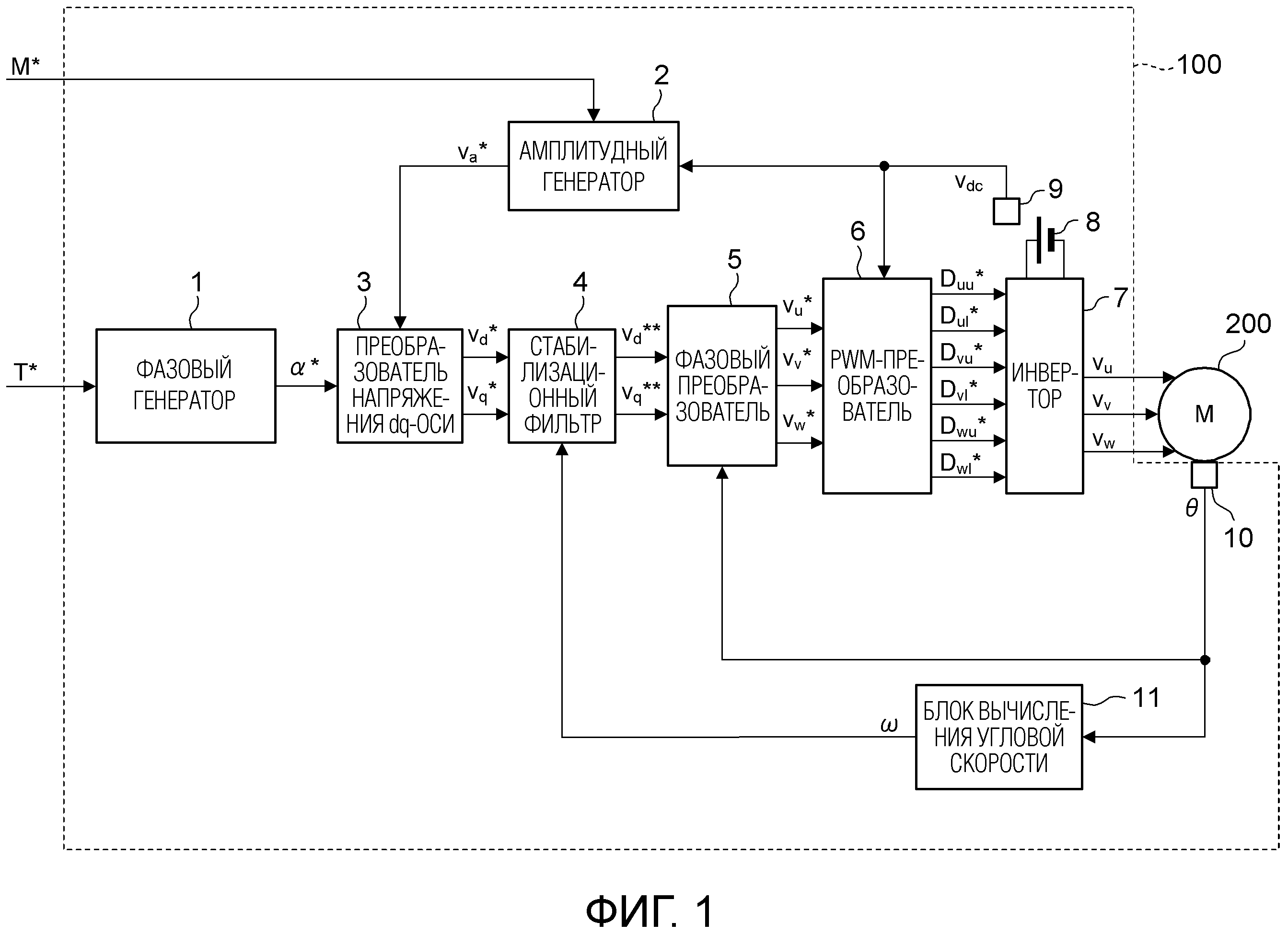
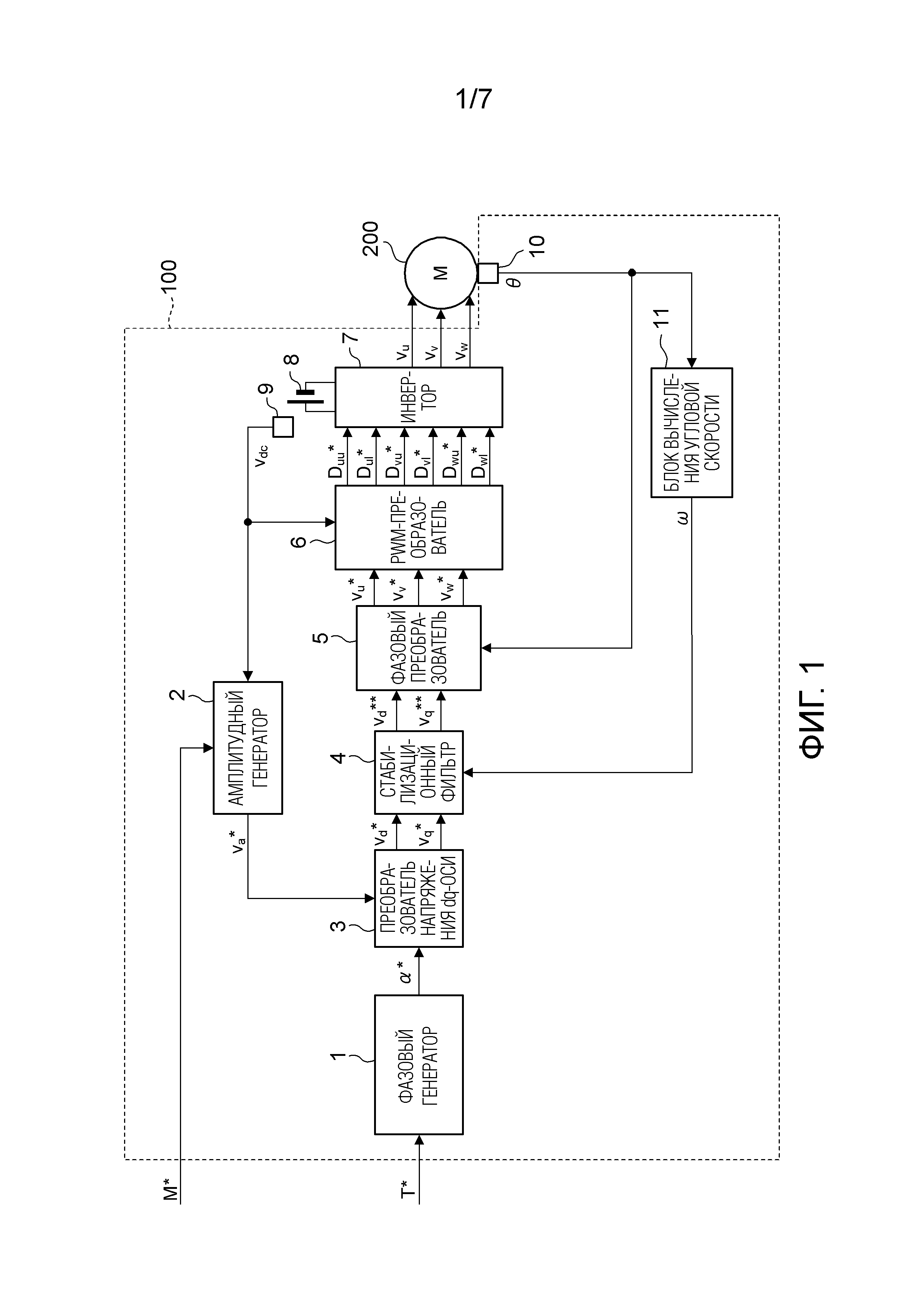
[0006] Фиг. 1 является блок-схемой устройства управления электромотором в первом варианте осуществления.
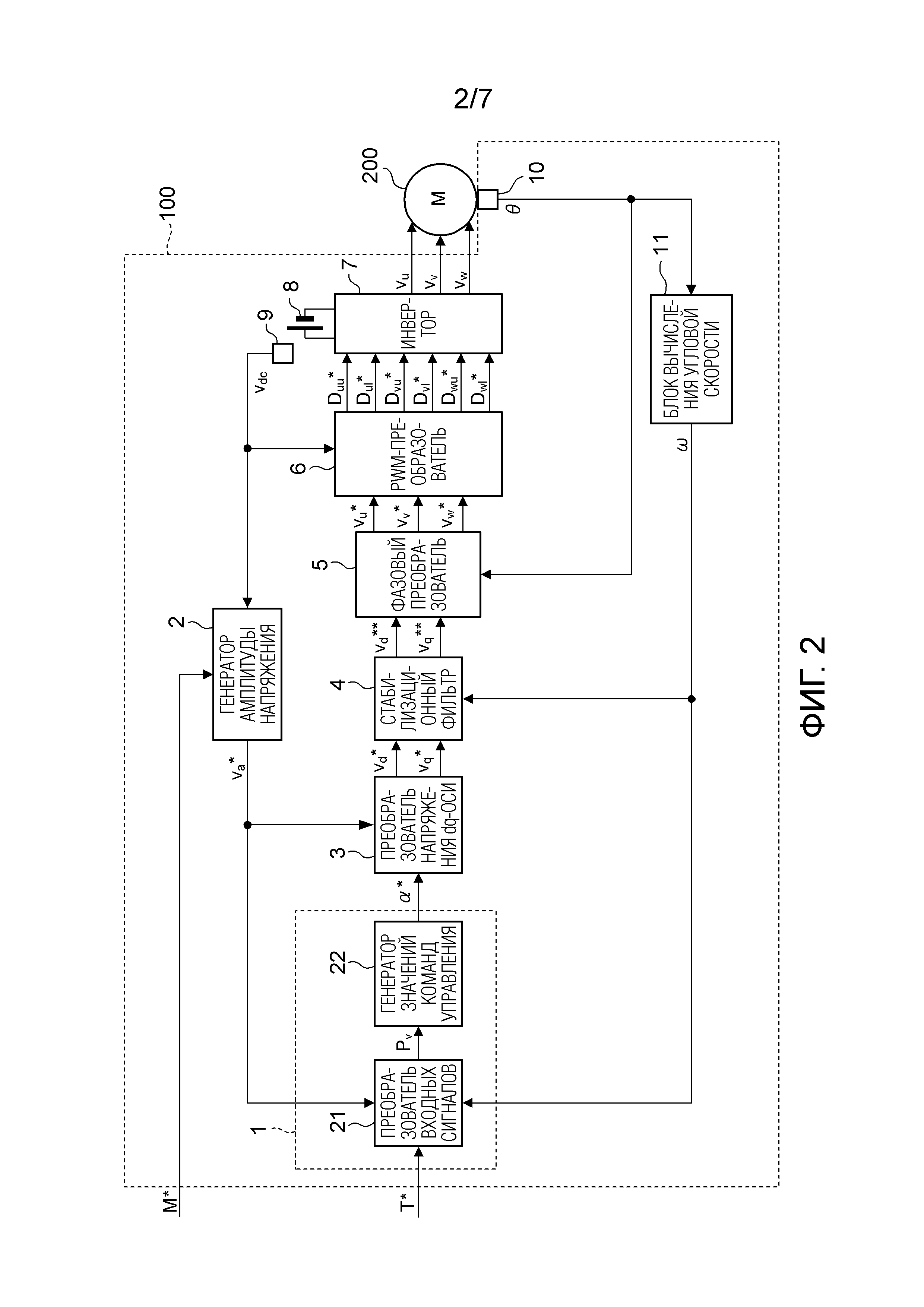
Фиг. 2 является блок-схемой устройства управления электромотором во втором варианте осуществления.
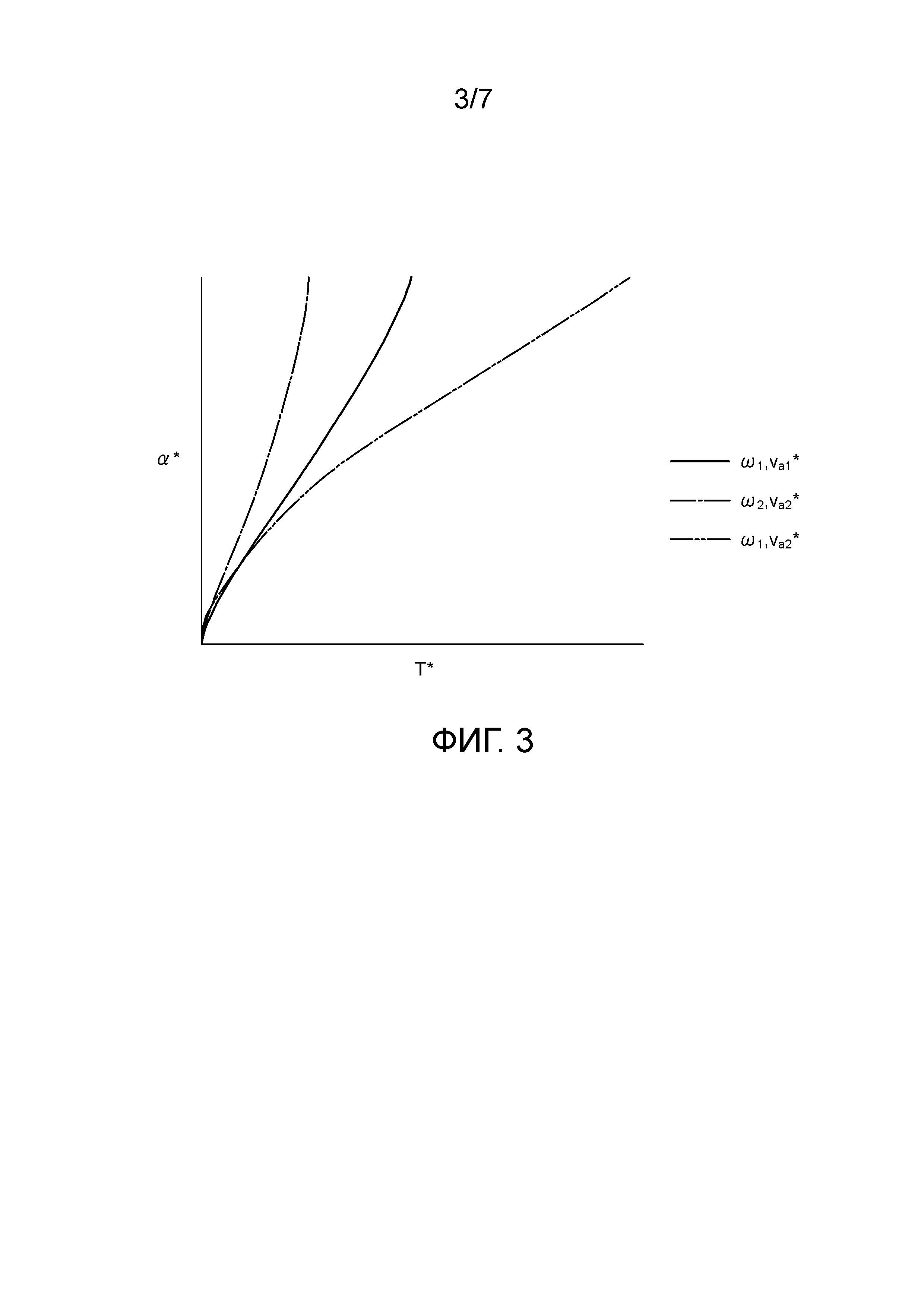
Фиг. 3 является видом, иллюстрирующим корреляцию между значением T* команды управления крутящим моментом и значением α* команды управления фазой.
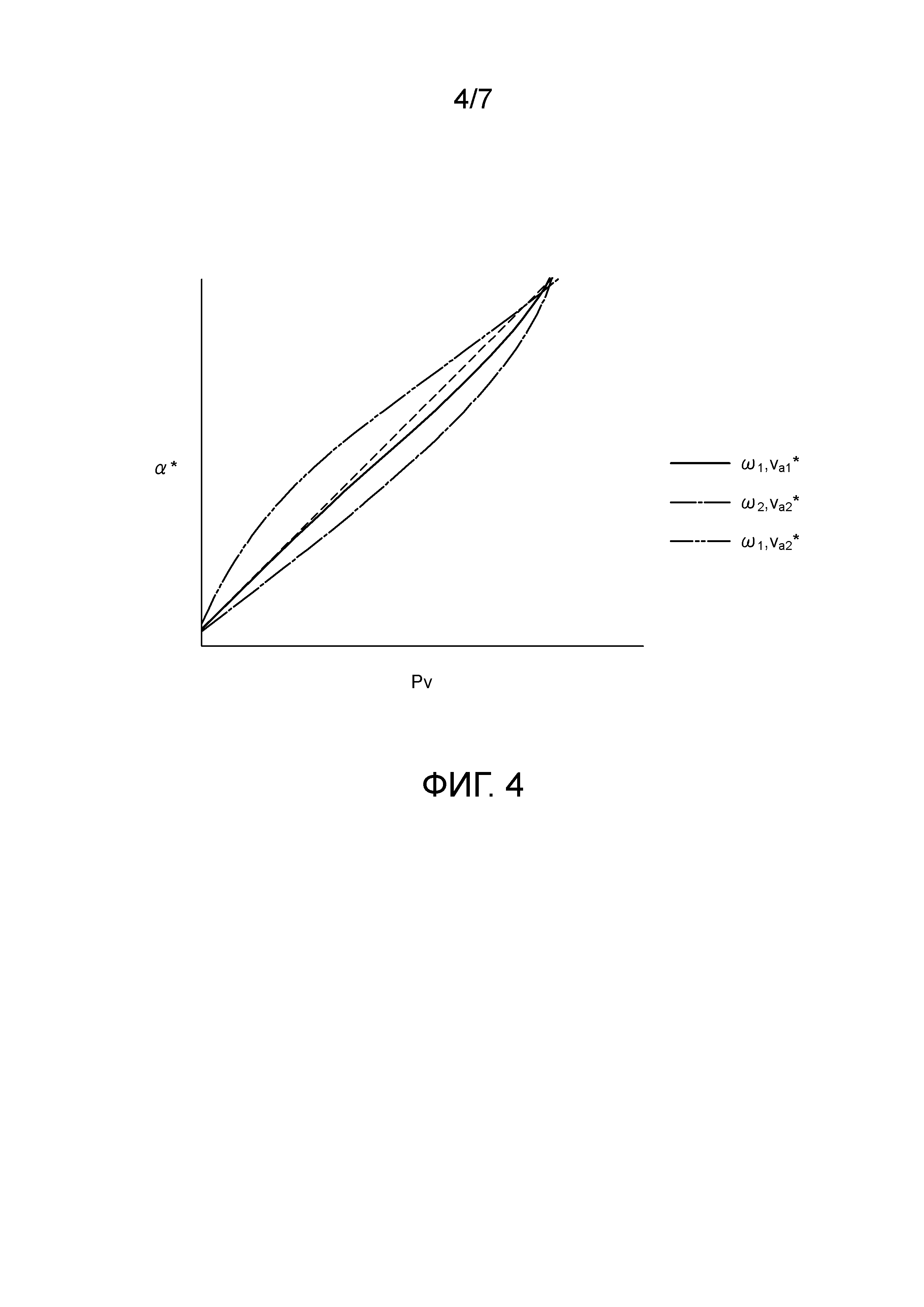
Фиг. 4 является видом, иллюстрирующим корреляцию между первым сигналом Pv и значением α* команды управления фазой.
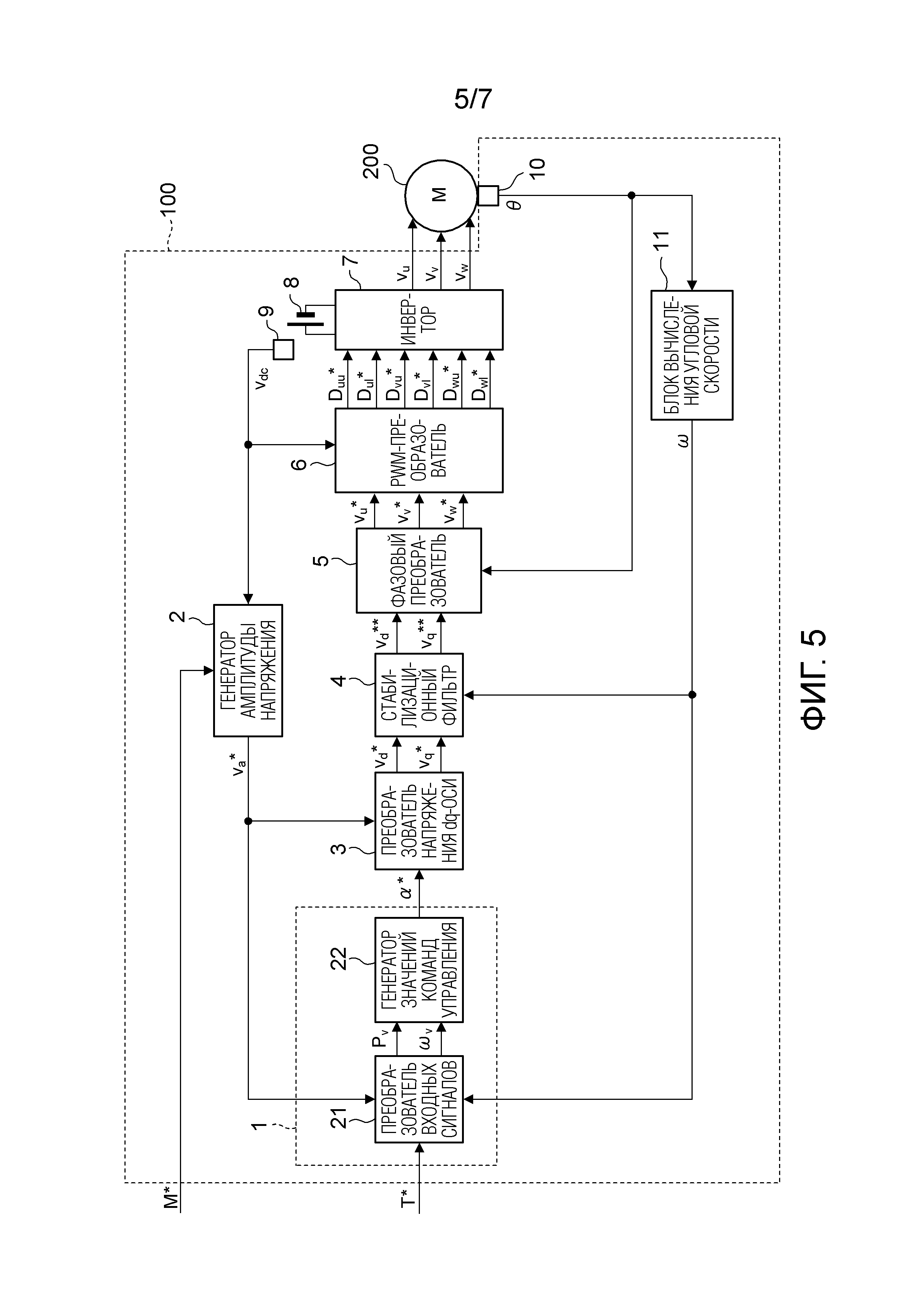
Фиг. 5 является блок-схемой устройства управления электромотором в третьем варианте осуществления.
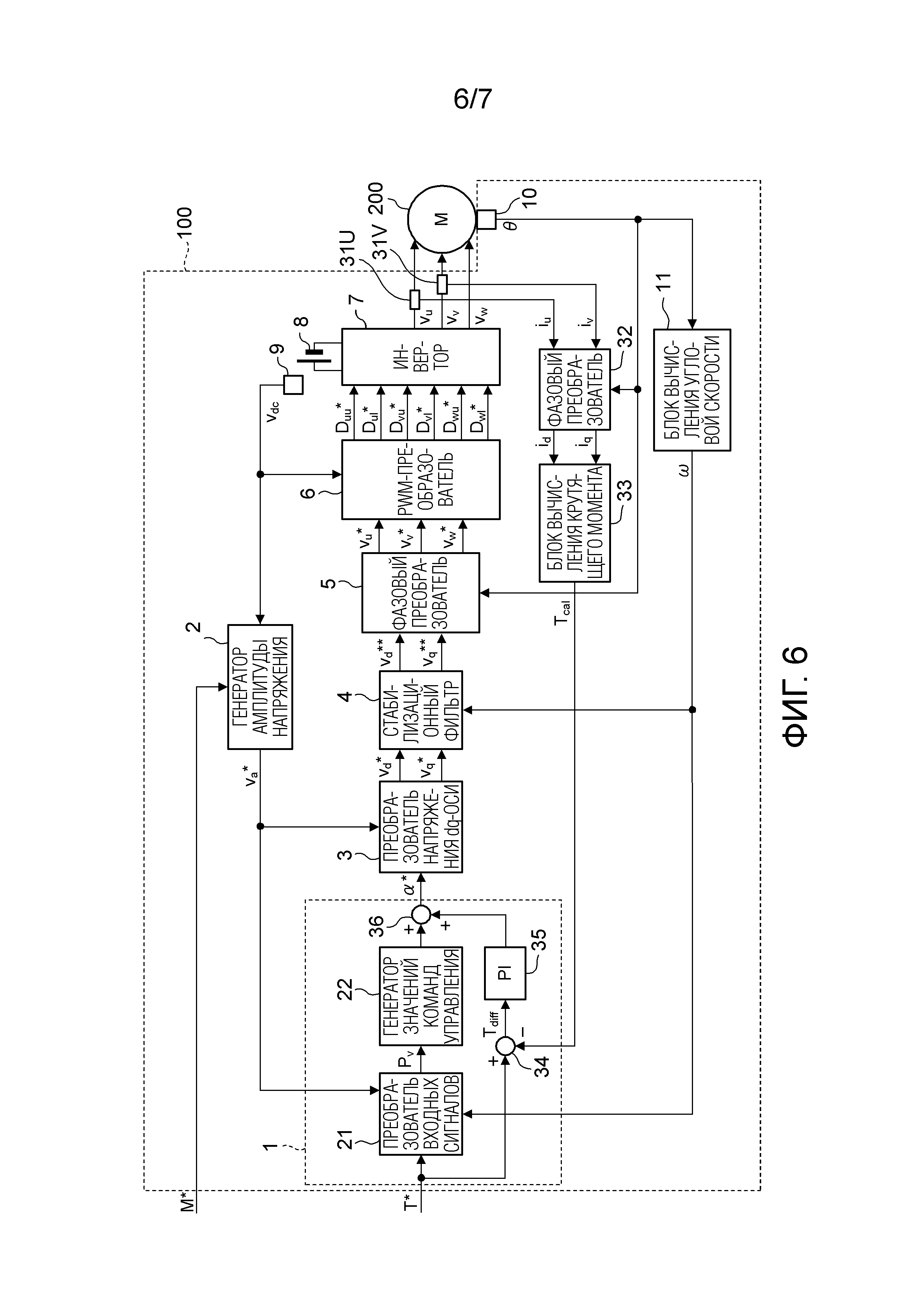
Фиг. 6 является блок-схемой устройства управления электромотором в четвертом варианте осуществления.
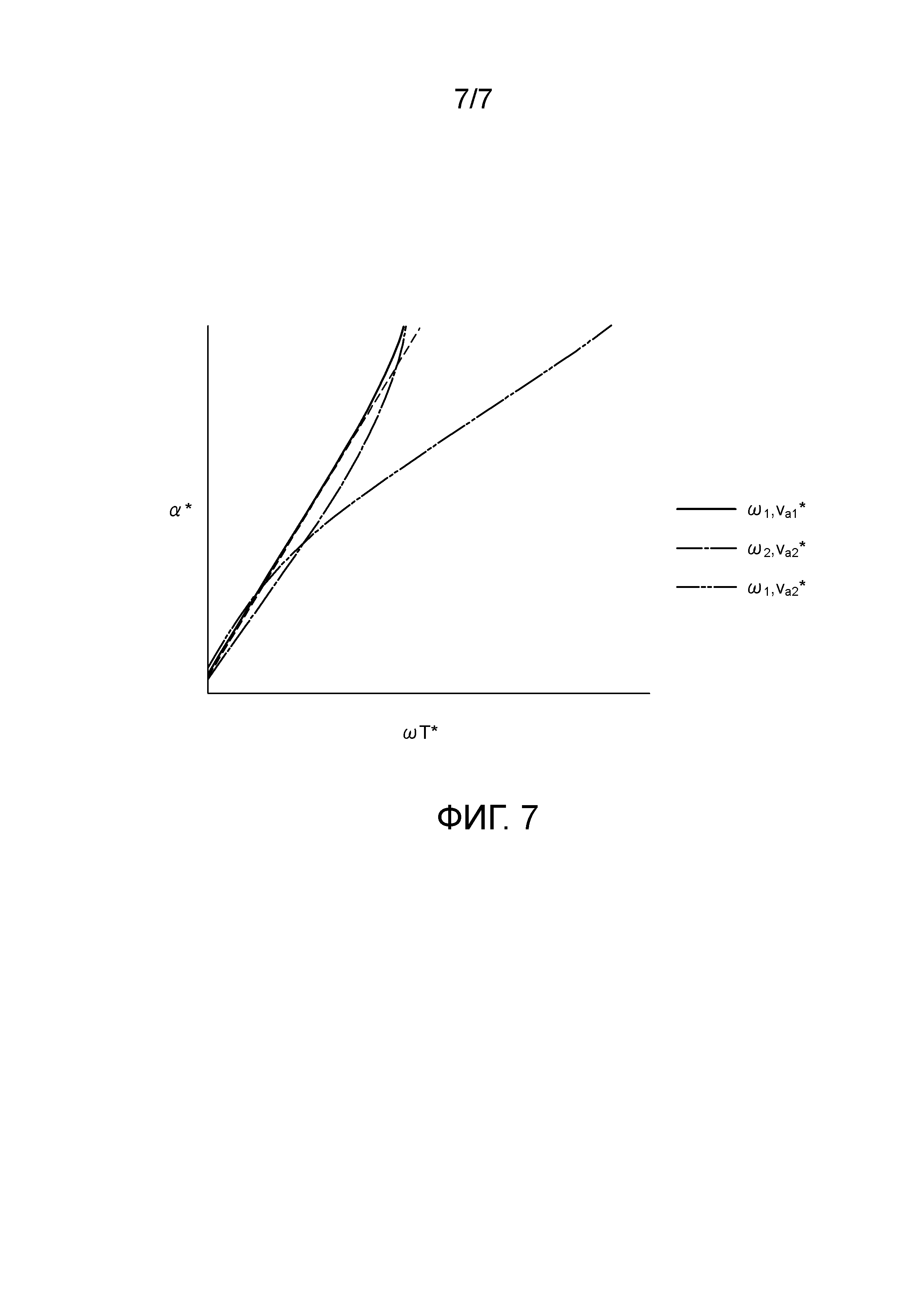
Фиг. 7 является видом, иллюстрирующим корреляцию между сигналом ωT* и значением α* команды управления фазой.
Подробное описание вариантов осуществления
[0007] Со ссылкой на прилагаемые чертежи, далее описываются варианты осуществления настоящего изобретения.
[0008] Первый вариант осуществления
Фиг. 1 является блок-схемой устройства управления электромотором в первом варианте осуществления.
[0009] Устройство 100 управления прикладывает трехфазные напряжения vu, vv, vw к электромотору 200 на основе ввода значения M* команды управления скоростью модуляции и значения T* команды управления крутящим моментом. Значение M* команды управления скоростью модуляции является значением, определенным посредством конструкции и т.п. электромотора 200, и используется, например, предварительно определенное значение, такое как "1,0". Дополнительно, значение T* команды управления крутящим моментом изменяется в соответствии со степенью открытия акселератора и т.п.
[0010] Устройство 100 управления включает в себя фазовый генератор 1, амплитудный генератор 2, преобразователь 3 напряжения dq-оси, стабилизационный фильтр 4, фазовый преобразователь 5, PWM-преобразователь 6, инвертор 7, аккумулятор 8, датчик 9 напряжения, датчик 10 вращения и блок 11 вычисления угловой скорости. Дополнительно, позиция ротора электромотора 200 определяется посредством датчика 10 вращения.
[0011] Фазовый генератор 1 вычисляет значение α* команды управления фазой, которое должно использоваться для управления фазой напряжения посредством управления с прямой связью, на основе значения T* команды управления крутящим моментом, вводимого из-за пределов из устройства 100 управления, и выводит вычисленное значение α* команды управления фазой в преобразователь 3 напряжения dq-оси. Более конкретно, фазовый генератор 1 имеет сохраненную таблицу и вычисляет значение α* команды управления фазой посредством использования таблицы. Управление с прямой связью выполняется на основе передаточной функции, которая моделирует управление фазой напряжения электромотора 200 и т.п. Следует отметить, что фазовый генератор 1 представляет собой один пример узла вычисления значений команд управления фазой, который выполняет этап вычисления значений команд управления фазой.
[0012] Значение M* команды управления скоростью модуляции вводится в амплитудный генератор 2 из-за пределов устройства 100 управления, и постоянное напряжение vdc аккумулятора 8, измеряемое посредством датчика 9 напряжения, также вводится в него. Следует отметить, что аккумулятор 8 подает, в инвертор 7, постоянное напряжение vdc в качестве напряжения приведения в действие. Амплитудный генератор 2 вычисляет значение va* команды управления амплитудой на основе этих вводов и выводит вычисленное значение va* команды управления амплитудой в преобразователь 3 напряжения dq-оси. Более конкретно, вычисление значения va* команды управления амплитудой выполняется посредством использования следующего уравнения. Следует отметить, что амплитудный генератор 2 представляет собой один пример узла вычисления значений команд управления амплитудой, который выполняет этап вычисления значений команд управления амплитудой.
[0013] Математическая формула 1
[0014] Преобразователь 3 напряжения dq-оси вычисляет значение vd* команды управления напряжением d-оси и значение vq* команды управления напряжением q-оси посредством использования значения α* команды управления фазой и значения va* команды управления амплитудой на основе следующего уравнения. Преобразователь 3 напряжения dq-оси затем выводит значение vd* команды управления напряжением d-оси и значение vq* команды управления напряжением q-оси в стабилизационный фильтр 4.
[0015] Математическая формула 2
[0016] Стабилизационный фильтр 4 представляет собой фильтр, который уменьшает колебания тока, протекающего в электромотор 200 в полосе резонансных частот, посредством использования известной технологии. Стабилизационный фильтр 4 выполняет фильтрацию для значения vd* команды управления напряжением d-оси и значения vq* команды управления напряжением q-оси на основе частоты ω вращения электромотора 200, выводимой из блока 11 вычисления угловой скорости. Более конкретно, стабилизационный фильтр 4 выполняет фильтрацию таким образом, чтобы кратковременно ограничивать изменения амплитуды и фазы, и вычисляет конечное значение vd** команды управления напряжением d-оси и конечное значение vq** команды управления напряжением q-оси. Стабилизационный фильтр 4 затем выводит конечное значение vd** команды управления напряжением d-оси и конечное значение vq** команды управления напряжением q-оси в фазовый преобразователь 5. Следует отметить, что в случае, если частоты значения vd* команды управления напряжением d-оси и значения vq* команды управления напряжением q-оси являются достаточно небольшими по сравнению с резонансной частотой тока, протекающего в электромотор 200, имеется очень незначительный риск того, что ток, протекающий в электромотор, 200 резонирует, так что стабилизационный фильтр 4 может не предоставляться.
[0017] Фазовый преобразователь 5 выполняет фазовое преобразование из dq-осей в uvw-фазы для конечного значения vd** команды управления напряжением d-оси и конечного значения vq** команды управления напряжением q-оси на основе фазы θ ротора, выводимой из датчика 10 вращения. Более конкретно, фазовый преобразователь 5 выполняет фазовое преобразование на основе следующего уравнения таким образом, чтобы вычислять значения vu*, vv*, vw* команд управления трехфазным напряжением. Затем фазовый преобразователь 5 выводит значения vu*, vv*, vw* команд управления трехфазным напряжением в PWM-преобразователь 6.
[0018] Математическая формула 3
[0019] PWM-преобразователь 6 выполняет известную обработку компенсации времени работы вхолостую, обработку повышения коэффициента использования напряжения и т.п. на основе значений vu*, vv*, vw* команд управления трехфазным напряжением и постоянного напряжения vdc, с тем чтобы формировать сигналы Duu*, Dul*, Dvu*, Dvl*, Dwu*, Dwl* приведения в действие. Следует отметить, что сигналы Duu*, Dul*, Dvu*, Dvl*, Dwu*, Dwl* приведения в действие вводятся в соответствующие переключающие элементы инвертора 7, состоящего из шести трехфазных плеч.
[0020] Инвертор 7 приводит в действие переключающие элементы на основе сигналов Duu*, Dul*, Dvu*, Dvl*, Dwu*, Dwl* приведения в действие посредством использования постоянного напряжения vdc, подаваемого из аккумулятора 8, и формирует трехфазные напряжения vu, vv, vw, которые являются псевдопеременными напряжениями. Инвертор 7 прикладывает трехфазные напряжения vu, vv, vw к электромотору 200. Другими словами, трехфазные напряжения vu, vv, vw представляют собой приложенные напряжения к электромотору 200.
[0021] При такой конфигурации, вращательный привод электромотора 200 управляется посредством управления фазой напряжения на основе значения α* команды управления фазой и значения va* команды управления амплитудой.
[0022] При использовании первого варианта осуществления, можно обеспечивать следующие преимущества.
[0023] В способе управления первого варианта осуществления, фазовый генератор 1 выполняет этап с прямой связью и вычисляет значение α* команды управления фазой. Амплитудный генератор 2 выполняет этап вычисления амплитуды и вычисляет значение va* команды управления амплитудой. Преобразователь 3 напряжения dq-оси, стабилизационный фильтр 4 и фазовый преобразователь 5 представляют собой пример узла вычисления значений команд управления напряжением. Узел вычисления значений команд управления напряжением выполняет этап вычисления значений команд управления напряжением на основе ввода значения α* команды управления фазой и значения va* команды управления амплитудой и вычисляет значения vu*, vv*, vw* команд управления трехфазным напряжением. PWM-преобразователь 6 представляет собой один пример узла приложения напряжения и прикладывает трехфазные напряжения vu, vv, vw, соответствующие значениям vu*, vv*, vw* команд управления трехфазным напряжением, к электромотору 200 в качестве приложенных напряжений через инвертор 7.
[0024] При управлении с обратной связью, выполняется управление на основе значения определения тока, протекающего в электромотор 200. С учетом этого, по сравнению с управлением с прямой связью, которое не использует значение определения, скорость отклика управления с обратной связью является низкой. Соответственно, посредством выполнения только управления с прямой связью, скорость отклика может задаваться выше случая, в котором управление с обратной связью выполняется. Вследствие этого, даже когда шум возникает в токе, протекающем в электромотор 200, например, шум уменьшается до того, как шум усиливается, в силу этого позволяя повышать стабильность электромотора 200.
[0025] Второй вариант осуществления
Первый вариант осуществления направлен на пример, в котором фазовый генератор 1 вычисляет значение α* команды управления фазой на основе значения T* команды управления крутящим моментом. Второй вариант осуществления направлен на пример, в котором фазовый генератор 1 вычисляет значение α* команды управления фазой дополнительно на основе значения va* команды управления амплитудой и частоты ω вращения.
[0026] Фиг. 2 является блок-схемой устройства управления электромотором во втором варианте осуществления.
[0027] Фазовый генератор 1 состоит из преобразователя 21 входных сигналов и генератора 22 значений команд управления.
[0028] В дополнение к значению T* команды управления крутящим моментом, значение va* команды управления амплитудой, выводимое из амплитудного генератора 2, и частота ω вращения, выводимая из блока 11 вычисления угловой скорости, вводятся в преобразователь 21 входных сигналов. Преобразователь 21 входных сигналов вычисляет первый сигнал Pv на основе этих входных значений в соответствии со следующим уравнением. Преобразователь 21 входных сигналов выводит вычисленный первый сигнал Pv в генератор 22 значений команд управления.
[0029] Математическая формула 4
[0030] Генератор 22 значений команд управления вычисляет значение α* команды управления фазой, соответствующее первому сигналу Pv, посредством обращения к таблице, сохраненной заранее. Следует отметить, что один пример взаимосвязи между первым сигналом Pv и значением α* команды управления фазой, заданной в таблице, проиллюстрирован на фиг. 4.
[0031] Здесь, со ссылкой на фиг. 3 и 4, далее описывается способ вычисления значения α* команды управления фазой в настоящем варианте осуществления.
[0032] Фиг. 3 является видом, иллюстрирующим корреляцию между значением T* команды управления крутящим моментом и значением α* команды управления фазой в общем синхронном электромоторе. Фиг. 4 является видом, иллюстрирующим корреляцию между первым сигналом Pv и значением α* команды управления фазой. Следует отметить, что на этих чертежах, случай, в котором частота ω вращения составляет ω1, и значение va* команды управления амплитудой составляет va1*, указывается посредством непрерывной линии, случай, в котором частота ω вращения составляет ω2, и значение va* команды управления амплитудой составляет va2*, указывается посредством штрихпунктирной линии, и случай, в котором частота ω вращения составляет ω1, и значение va* команды управления амплитудой составляет va2*, указывается посредством двойной штрихпунктирной линии.
[0033] Как проиллюстрировано на фиг. 3, корреляция между значением T* команды управления крутящим моментом и значением α* команды управления фазой варьируется в зависимости от значения va* команды управления амплитудой и частоты ω вращения. С учетом этого, в случае если значение α* команды управления фазой находится только на основе значения T* команды управления крутящим моментом, фазовый генератор 1 должен сохранять корреляцию между значением T* команды управления крутящим моментом и значением α* команды управления фазой для каждого значения из значения va* команды управления амплитудой и частоты ω вращения.
[0034] В связи с тем, когда три параметра (значение T* команды управления крутящим моментом, значение va* команды управления амплитудой и частота ω вращения) используются для вычисления значения α* команды управления фазой, нагрузка по обработке в фазовом генераторе 1 является большой. С учетом этого, в настоящем варианте осуществления, первый сигнал Pv используется для вычисления значения α* команды управления фазой.
[0035] Фиг. 4 является видом, иллюстрирующим корреляцию между первым сигналом Pv и значением α* команды управления фазой в общем синхронном электромоторе. В этой корреляции, даже если значение va* команды управления амплитудой и частота ω вращения изменяются, корреляция между первым сигналом Pv и значением α* команды управления фазой имеют очень небольшие варьирования. Соответственно, значение α* команды управления фазой может выражаться посредством использования линейной функции с применением первого сигнала Pv в качестве переменной, как указано посредством пунктирной линии. С учетом этого, фазовый генератор 1 может точно вычислять значение α* команды управления фазой посредством использования первого сигнала Pv и линейной функции, указываемой посредством пунктирной линии на фиг. 4.
[0036] Далее описывается корреляция между первым сигналом Pv и значением α* команды управления фазой.
[0037] В общем синхронном электромоторе, устойчивая взаимосвязь между током i и напряжением v и взаимосвязь между током i и крутящим моментом T в dq-координате могут выражаться посредством следующих уравнений.
[0038] Математическая формула 5

[0039] Математическая формула 6

[0040] Следует отметить, что R указывает сопротивление обмотки, φ указывает сопряженный поток, Ld указывает индуктивность d-оси, и Lq указывает индуктивность q-оси.
[0041] Здесь, если предполагается, что ωLd и ωLq существенно превышают R, уравнение (5) может аппроксимироваться в следующее уравнение.
[0042] Математическая формула 7
[0043] Следующее уравнение извлекается из уравнения (6) и уравнения (7).
[0044] Математическая формула 8

[0045] В правой стороне уравнения (8), первый член больше второго члена, так что второй член может быть исключен. В этой связи, уравнение (8) приблизительно равняется следующему уравнению.
[0046] Математическая формула 9
[0047] Здесь, левая сторона уравнения (9) соответствует Pv, так что следующее уравнение извлекается из уравнения (9).
[0048] Математическая формула 10

[0049] Здесь, сопряженный поток φ и индуктивность Ld d-оси определяются посредством конфигурации электромотора 200. Соответственно, обнаружено, что значение α* команды управления фазой изменяется только в соответствии с первым сигналом Pv. В связи с этим, значение α* команды управления фазой может находиться только на основе первого сигнала Pv, так что значение α* команды управления фазой может находиться точно при том, что нагрузка в фазовом генераторе 1 уменьшается.
[0050] Обычно, ширина флуктуации значения va* команды управления амплитудой меньше ширины флуктуации частоты ω вращения, так что значение va* команды управления амплитудой может считаться постоянным. С учетом этого, сигнал может находиться посредством использования значения T* команды управления крутящим моментом и частоты ω вращения из числа параметров, составляющих первый сигнал Pv, и значение α* команды управления фазой может вычисляться на основе сигнала. Между тем, в случае если частота ω вращения не изменяется, сигнал может находиться посредством использования значения T* команды управления крутящим моментом и значения va* команды управления амплитудой, и значение α* команды управления фазой может вычисляться на основе сигнала.
[0051] При использовании второго варианта осуществления, можно обеспечивать следующие преимущества.
[0052] В способе управления второго варианта осуществления, первый сигнал Pv, вычисленный посредством преобразователя 21 входных сигналов, представляет собой параметр, пропорциональный значению T* команды управления крутящим моментом и частоте ω вращения электромотора 200 и обратно пропорциональный значению va* команды управления амплитудой. Как проиллюстрировано на фиг. 4, можно считать, что значение α* команды управления фазой изменяется не в соответствии со значением va* команды управления амплитудой и частотой ω вращения, а только в соответствии с первым сигналом Pv. С учетом этого, нагрузка по обработке может задаваться меньшей в случае, если первый сигнал Pv вычисляется, и значение α* команды управления фазой вычисляется посредством использования первого сигнала Pv, чем в случае, если значение α* команды управления фазой вычисляется посредством использования трех параметров, т.е. значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. Более конкретно, таблица на основе экспериментов и анализа может легко формироваться, и дополнительно, CPU-ресурс (емкость записи данных и вычислительная нагрузка) может уменьшаться.
[0053] Способ управления второго варианта осуществления может осуществляться таким образом, что одно из значения va* команды управления амплитудой и частоты ω вращения предполагается постоянным, сигнал находится на основе другого из них, и значение T* команды управления крутящим моментом и значение α* команды управления фазой могут находиться на основе сигнала. Например, в случае если ширина флуктуации значения va* команды управления амплитудой является небольшой и считается постоянной, сигнал может находиться на основе частоты ω вращения и значения T* команды управления крутящим моментом, и значение α* команды управления фазой может вычисляться на основе сигнала. При такой конфигурации, нагрузка по обработке фазового генератора 1 дополнительно может задаваться небольшой.
[0054] Третий вариант осуществления
Второй вариант осуществления направлен на пример, в котором фазовый генератор 1 вычисляет значение α* команды управления фазой посредством использования первого сигнала Pv. Третий вариант осуществления направлен на пример, в котором фазовый генератор 1 вычисляет значение α* команды управления фазой посредством использования второго сигнала ωv в дополнение к первому сигналу.
[0055] Фиг. 5 является схемой принципиальной конфигурации устройства управления электромотором в третьем варианте осуществления.
[0056] Преобразователь 21 входных сигналов дополнительно вычисляет второй сигнал ωv на основе значения va* команды управления амплитудой и частоты ω вращения посредством использования следующего уравнения. Преобразователь 21 входных сигналов выводит вычисленный второй сигнал ωv в генератор 22 значений команд управления.
[0057] Математическая формула 11
[0058] Здесь, со ссылкой на уравнение (8), второй член в правой стороне изменяется в соответствии с инверсией второго сигнала ωv. Таким образом, второй сигнал ωv способствует изменению значения α* команды управления фазой. С учетом этого, точность вычисления значения α* команды управления фазой может повышаться посредством использования второго сигнала ωv в дополнение к первому сигналу Pv.
[0059] Следует отметить, что второй сигнал ωv на основе значения va* команды управления амплитудой и частоты ω вращения используется в качестве второго сигнала, но второй сигнал не ограничен этим. Например, в случае если значение va* команды управления амплитудой предполагается постоянным, частота ω вращения может использоваться в качестве второго сигнала. Альтернативно, в случае если частота ω вращения предполагается постоянной, значение va* команды управления амплитудой может использоваться в качестве второго сигнала.
[0060] С использованием третьего варианта осуществления, можно обеспечивать следующие преимущества.
[0061] В способе управления третьего варианта осуществления, фазовый генератор 1 вычисляет значение α* команды управления фазой посредством использования второго сигнала ωv, пропорционального частоте ω вращения и обратно пропорционального значению va* команды управления амплитудой, в дополнение к первому сигналу Pv. Как показано во втором члене в правой стороне в уравнении (8), второй сигнал ωv способствует значению α* команды управления фазой. С учетом этого, точность вычисления значения α* команды управления фазой может дополнительно повышаться посредством использования второго сигнала ωv.
[0062] Четвертый вариант осуществления
Первый-третий варианты осуществления направлены на пример, в котором фазовый генератор 1 вычисляет значение α* команды управления фазой посредством управления с прямой связью. Четвертый вариант осуществления направлен на пример, в котором фазовый генератор 1 выполняет управление с обратной связью в дополнение к управлению с прямой связью.
[0063] Фиг. 6 является блок-схемой устройства управления электромотором в четвертом варианте осуществления.
[0064] Поскольку электромотор 200 приводится в действие посредством трехфазных напряжений, инвертор 7 и электромотор 200 соединяются между собой через три линии обмотки, соответствующие трем фазам. Трехфазное напряжение vu вводится в электромотор 200 через токопроводящую линию u-фазы, трехфазное напряжение vv вводится в него через токопроводящую линию v-фазы, и трехфазное напряжение vw вводится в него через токопроводящую линию w-фазы. Датчик 31u тока предоставляется в токопроводящей линии u-фазы, и датчик 31v тока предоставляется в токопроводящей линии v-фазы. Значение iu тока u-фазы, определенное посредством датчика 31u тока, и значение iv тока v-фазы, определенное посредством датчика 31v тока, выводятся в фазовый преобразователь 32.
[0065] Фазовый преобразователь 32 выполняет преобразование координат из UVW-фаз в dq-осе посредством выполнения преобразования координат, показанного в следующем уравнении. Следует отметить, что сумма iu, iv, iw в качестве трехфазных токов равна нулю, так что ток iw w-фазы может выражаться как "-iu-iv".
[0066] Математическая формула 12
[0067] Как выражается в уравнении (12), фазовый преобразователь 32 выполняет преобразование координат для значения iu тока u-фазы и значения iv тока v-фазы на основе фазы θ вращения, которая представляет собой электрический угол, выводимый из датчика 10 вращения, с тем чтобы вычислять значение id тока d-оси и значение iq тока q-оси. Фазовый преобразователь 32 выводит значение id тока d-оси и значение iq тока q-оси в блок 33 вычисления крутящего момента.
[0068] Блок 33 вычисления крутящего момента сохраняет таблицу, иллюстрирующую взаимосвязь значений тока d-оси и q-оси с крутящим моментом в электромоторе 200. Блок 33 вычисления крутящего момента вычисляет оцененный крутящий момент Tcal посредством использования таблицы на основе значения id тока d-оси и значения iq тока q-оси. Другими словами, оцененный крутящий момент Tcal представляет собой крутящий момент, соответствующий значению тока электромотора 200.
[0069] Фазовый генератор 1 включает в себя вычитатель 34, блок 35 PI-вычисления и сумматор 36 в дополнение к преобразователю 21 входных сигналов и генератору 22 значений команд управления.
[0070] Вычитатель 34 вычитает оцененный крутящий момент Tcal из значения T* команды управления крутящим моментом и выводит результат вычитания в блок 35 PI-вычисления в качестве разности Tdiff крутящих моментов.
[0071] Когда блок 35 PI-вычисления принимает разность Tdiff крутящих моментов, блок 35 PI-вычисления выполняет вычисление PI-усиления и выводит результат вычисления в сумматор 36. Следует отметить, что значение команды управления фазой, которое должно использоваться для управления с обратной связью, формируется посредством вычитателя 34 и блока 35 PI-вычисления.
[0072] Сумматор 36 суммирует значение команды управления фазой, сформированное посредством генератора 22 значений команд управления, и значение команды управления фазой, сформированное посредством блока 35 PI-вычисления, и выводит дополнительное значение в преобразователь 3 напряжения dq-оси в качестве значения α* команды управления фазой. Настоящим, фазовый генератор 1 выполняет управление с обратной связью в дополнение к управлению с прямой связью.
[0073] С использованием четвертого варианта осуществления, можно обеспечивать следующие преимущества.
[0074] В способе управления четвертого варианта осуществления, фазовый генератор 1 выполняет управление с обратной связью посредством вычитателя 34 и блока 35 PI-вычисления в дополнение к управлению с прямой связью.
[0075] Более конкретно, блок 33 вычисления крутящего момента оценивает оцененный крутящий момент Tcal из тока, протекающего в электромотор 200, и вычитатель 34 вычисляет разность Tdiff крутящих моментов, которая является отклонением между значением T* команды управления крутящим моментом и оцененным крутящим моментом Tcal. Блок 35 PI-вычисления вычисляет значение команды управления фазой таким образом, чтобы уменьшать разность Tdiff крутящих моментов. Управление с обратной связью выполняется таким способом. Здесь, в присутствии флуктуации или возмущений силовой установки, устойчивое отклонение может формироваться в крутящем моменте электромотора 200. Тем не менее, посредством выполнения управления с обратной связью таким способом, устойчивое отклонение в электромоторе 200 уменьшается, в силу этого позволяя стабилизировать управление вращением.
[0076] Пятый вариант осуществления
Первый-четвертый варианты осуществления направлены на пример, в котором фазовый генератор 1 вычисляет значение α* команды управления фазой посредством использования одного или более сигналов, состоящих из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. Пятый вариант осуществления подробно описывает конфигурации сигналов.
[0077] Во втором варианте осуществления, первый член в правой стороне уравнения (8) фокусируется, и значение α* команды управления фазой вычисляется посредством использования первого сигнала Pv, пропорционального значению T* команды управления крутящим моментом, пропорциональному частоте ω вращения и обратно пропорциональному значению va* команды управления амплитудой. В связи с этим, сигнал, выводимый из преобразователя 21 входных сигналов, должен состоять из комбинации, которая включает в себя все значение T* команды управления крутящим моментом, значение va* команды управления амплитудой и частоту ω вращения.
[0078] Рассмотрение комбинации означенного приводит к трем группам, как проиллюстрировано в таблице 1.
[0079] Табл. 1
|
[0080] Группа A указывает сигнал, состоящий из комбинации всех из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. Группа A имеет один тип сигнала.
[0081] Группа B указывает сигнал, состоящий из любых двух из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. Группа B имеет три типа сигналов.
[0082] Группа C указывает сигнал с использованием любого из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения как есть. Группа C имеет три типа сигналов.
[0083] Посредством выбора одного или более сигналов из сигналов в этих группах определяется сигнал, используемый для вычисления значения α* команды управления фазой. Чтобы точно находить значение α* команды управления фазой, сигнал, выбранный таким способом, должен включать в себя, по меньшей мере, одно из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. Таблица 2 иллюстрирует выбор сигналов.
[0084] Табл. 2
|
[0085] Когда один сигнал выбирается, как проиллюстрировано в (i), "<1> ωT*/va*" выбирается из группы A таким образом, что значение T* команды управления крутящим моментом, значение va* команды управления амплитудой и частота ω вращения включены. Следует отметить, что пример с использованием <1> описывается во втором варианте осуществления.
[0086] Случаи, в которых два сигнала выбираются, проиллюстрированы в (ii)-(v).
[0087] Случай, в котором один сигнал выбирается из группы A, и один сигнал выбирается из группы B, проиллюстрирован в (ii). В этом случае, рассматриваются три случая, т.е. "<02> ωT*/va*, ωT*", "<03> ωT*/va*, T*/va*" и"<04> ωT*/va*, ω/va*".
[0088] Случай, в котором один сигнал выбирается из группы A, и один сигнал выбирается из группы C, проиллюстрирован в (iii). В этом случае, рассматриваются три случая, т.е. "<05> ωT*/va*, T*", "<06> ωT*/va*, ω" и"<07> ωT*/va*, 1/va*".
[0089] Случай, в котором два сигнала выбираются из группы B, проиллюстрирован в (iv). В этом случае, выбранные сигналы должны включать в себя, по меньшей мере, одно из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. С учетом этого, рассматриваются три случая, т.е. "<08> ωT*, T*/va*", "<09> ωT*, ω/va*" и"<10> T*/va*, ω/va*". Следует отметить, что пример с использованием <09> описывается в третьем варианте осуществления.
[0090] Случай, в котором один сигнал выбирается из группы B, и один сигнал выбирается из группы C, проиллюстрирован в (v). В этом случае, рассматриваются три случая, т.е. "<11> ωT*, 1/va*", "<12>T*/va*, ω" и"<13> ω/va*, T*".
[0091] Следует отметить, что один сигнал выбирается в <01>, и два сигнала выбираются в <02>-<13>, но настоящее изобретение не ограничено этим. Три сигнала могут выбираться таким образом, что они включают в себя, по меньшей мере, одно из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения.
[0092] В связи с этим, посредством выбора сигнала таким образом, что он включает в себя, по меньшей мере, одно из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения, по меньшей мере, первый член определяется в правой стороне уравнения (8) таким образом, что значение α* команды управления фазой может точно вычисляться.
[0093] Здесь, подробно описывается случай <11>.
[0094] Фиг. 7 является видом, иллюстрирующим корреляцию между ωT* и значением α* команды управления фазой.
[0095] В отношении чертежа, "случай, в котором частота ω вращения составляет ω1, и значение va* команды управления амплитудой составляет va1*", как указано посредством непрерывной линии, и "случай, в котором частота ω вращения составляет ω2, и значение va* команды управления амплитудой составляет va2*", как указано посредством штрихпунктирной линии, в общем, имеют идентичный уклон. С учетом этого, эти случаи могут аппроксимироваться в линейную функцию, которая применяет ωT* в качестве переменной, как указано посредством пунктирной линии. Уклон линейной функции отличается от уклона "случая, в котором частота ω вращения составляет ω1, и значение va* команды управления амплитудой составляет va2*", как указано посредством двойной штрихпунктирной линии. Соответственно, обнаружено, что уклон на чертеже определяется в зависимости от значения va* команды управления амплитудой, а именно, 1/va*.
[0096] С учетом этого, когда корреляция между ωT* и значением α* команды управления фазой сохраняется в ассоциации с 1/va*, α* может находиться с большей точностью посредством использования двух сигналов в <11>.
[0097] С использованием пятого варианта осуществления, можно обеспечивать следующие преимущества.
[0098] В пятом варианте осуществления, когда сигнал, вводимый в генератор 22 значений команд управления, выбирается, сигналы выбираются таким образом, что они включают в себя, по меньшей мере, одно из значения T* команды управления крутящим моментом, значения va* команды управления амплитудой и частоты ω вращения. Сигналы, выбранные таким способом, включают в себя все элементы, исходящие из значения α* команды управления фазой, проиллюстрированного в первом члене в правой стороне уравнения (8). Соответственно, можно точно вычислять значение α* команды управления фазой.
[0099] Выше описываются варианты осуществления настоящего изобретения, но варианты осуществления примерно иллюстрируют некоторые примеры вариантов применения настоящего изобретения и не имеют намерение ограничивать объем настоящего изобретения конкретными конфигурациями вариантов осуществления. Дополнительно, варианты осуществления могут комбинироваться надлежащим образом.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Инверторное устройство и способ управления инвертором
Устройство управления электродвигателем и способ управления электродвигателем
Способ управления электрической мощностью и устройство управления электрической мощностью

