Результат интеллектуальной деятельности: Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения и может быть использовано для обеспечения безопасности полета летательного аппарата на малых высотах.
Лазерный локатор (ЛЛ) является принципиально новым средством информационного обеспечения маловысотного полета (МВП). Его применение на ЛА существенно расширяет функциональные возможности авиации, позволяя решать на предельно малых высотах полета (20-50 м) задачи точной доставки оружия, десантирования грузов, пожаротушения, разведки, монтажных работ при строительстве, спасательных операций и т.п. Формируемая ЛЛ 3D информация о наблюдаемой наземной сцене в сочетании со способностью своевременного обнаружения таких тонких препятствия как провода, тросы (в том числе и неметаллические), растяжки, мачты и т.п. позволяет автоматически пролонгировать траекторию полета и обеспечивает безопасность выполнения поставленных задач в сложной фоно-целевой обстановке без априорных данных о рельефе и конфигурации наземных объектов. Использование в локаторе излучения на длине волны в два раза большей, чем красная граница спектрального диапазона глаза, позволяет работать в сложных метеоусловиях и дымах и не создает угроз для глаз людей, оказавшихся на анализируемой сцене.
Специфической особенностью ЛЛ является формирование узких (менее одной угловой минуты) диаграмм направленности излучения. Угловая скорость сканирования такой диаграммой при достигнутых частотах следования зондирующих импульсов (30-100 кГц) ограничена, что приводит при регулярных развертках либо к малым полям обзора, либо к низкому темпу обновления информации в поле обзора. Такой недостаток имеет место во всех созданных и разрабатываемых ЛЛ системах [1-3]. В заявляемом изобретении предложен выход из создавшегося положения путем отказа от регулярных разверток дальностного поля с целью экономного расходования зондирующих импульсов, т.е. такого управления угловым движением лазерного луча, которое использует уже накопленную информацию о дальностном поле и ориентировано на решение конкретных задач планирования измерений угол-угол-дальность в процессе сканирования анализируемой сцены.
Известен способ [2, 3] сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения МВП, основанный на периодическом сканировании окружающего пространства в пределах поля обзора локатора путем такого изменения во времени угловой ориентации узкой диаграммы направленности излучения лазерного локатора с одновременным измерением углов и дальностей при частоте следования зондирующих импульсов несколько десятков килогерц, которое приводит к формированию двумерной траектории сканирования в координатах угол-угол, соответствующей прореженной развертке поля дальностей до подстилающей поверхности с достаточной для обнаружения препятствий плотностью точек зондирования на этих препятствиях, определении на каждом периоде сканирования по результатам измерений углов и дальностей формы рельефа местности и координат препятствий для пролонгации безопасных траекторий полета летательного аппарата, реализации траектории сканирования за время каждого полупериода обновления информации о поле дальностей путем формирования таких фрагментов траектории, которые являются результатом сложения относительно медленного поворота базовой системы координат с постоянным вектором угловой скорости и быстрого изменения угловой ориентации лазерного луча относительно этой системы координат, использовании для быстрого изменения угловой ориентации лазерного луча фиксированной траектории равномерного движения по отрезку прямой в координатах угол-угол, имеющему длину, равную линейному размеру поля обзора.
Отличительной особенностью реализации такого способа является использование многоканального оптико-волоконного устройства для преобразования быстрого движения по окружности сфокусированного излучения лазера в периодическое дискретное перемещение излучающей точки по отрезку прямой, расположенной в фокальной плоскости объектива, и для обратного преобразования прямолинейного перемещения сфокусированного принятого эхо-сигнала в синхронное с излучением лазера движение по окружности излучающей эхо-точки. В результате применения такого оптико-волоконного преобразователя при медленном вращении базовой системы координат (головного зеркала) во внешнем пространстве формируется обычный растр с быстрой строчной разверткой при использовании в приборе достаточно просто реализуемого быстрого кругового сканирования торцов оптических волокон путем вращения скошенного микрозеркала вокруг оси, совпадающего с направлением излучения лазера и оптической осью фотоприемника импульсного эхо-сигнала. Причем из-за ограничений сверху на суммарное количество излученных импульсов за время формирования кадра и на период обновления информации об объектах в пределах поля обзора развертка получается прореженной, т.е. угловое расстояние между направлениями зондирования значительно больше ширины диаграмм направленности излучения и приема. Поэтому недостатком данного способа является возможность необнаружения тонкого препятствия (провода, троса и т.п.) при его расположении между строками или столбцами растра. Другой недостаток, общий для любого способа регулярного сканирования, заключается в существенном ограничении поля обзора по азимуту, из-за необходимости охвата по углу места возможных изменений высот рельефа местности и наземных объектов. Это приводит к существенным ограничениям по количеству пролонгируемых безопасных траекторий полета ЛА при виражах на малых высотах полета.
Наиболее близким к заявляемому изобретению является способ, использованный в патенте США №5465142 [1], основанный на периодическом сканировании окружающего пространства в пределах поля обзора локатора путем такого изменения во времени угловой ориентации узкой диаграммы направленности излучения лазерного локатора с одновременным измерением углов и дальностей при частоте следования зондирующих импульсов несколько десятков килогерц, которое приводит к формированию двумерной траектории сканирования в координатах угол-угол, соответствующей прореженной развертке поля дальностей до подстилающей поверхности с достаточной для обнаружения препятствий плотностью точек зондирования на этих препятствиях, определении на каждом периоде сканирования по результатам измерений углов и дальностей формы рельефа местности и координат препятствий для пролонгации безопасных траекторий полета летательного аппарата, реализации траектории сканирования за время каждого полупериода обновления информации о поле дальностей путем формирования таких фрагментов траектории, которые являются результатом сложения относительно медленного поворота базовой системы координат с постоянным вектором угловой скорости и быстрого двумерного изменения угловой ориентации лазерного луча относительно этой системы координат, использовании для быстрого двумерного изменения угловой ориентации лазерного луча фиксированной траектории равномерного движения по окружности в координатах угол-угол, имеющей диаметр, равный вертикальному размеру поля обзора.
Недостатком известного способа является использование фиксированной траектории равномерного движения по окружности для быстрого изменения угловой ориентации лазерного луча относительно базовой системы координат, медленно вращающейся с постоянным вектором угловой скорости. При этом фиксированная траектория равномерного движения по окружности в координатах угол-угол, имеет диаметр, равный вертикальному размеру поля обзора. Такой вид сканирования также как любое другое регулярное сканирование (например, в аналоге [2, 3]) приводит к тому, что большая часть зондирующих импульсов не приносит полезной информации о подстилающей поверхности, так как зондирование производится по всему полю обзора на каждом периоде сканирования, а информативной является только небольшая часть поля обзора, в котором формируется ЛЛ изображение участка земной поверхности, расположенного в диапазоне дальности надежного обнаружения всех препятствий, включая провода тросы и т.п. Надежное обнаружение тонких препятствий (проводов, тросов и т.п.) возможно только при достаточно плотном расположении диаграмм направленности вдоль траектории сканирования со значительным перекрытием соседних диаграмм, соответствующих каждой паре подряд излученных зондирующих импульсов. Поэтому ограничена угловая скорость движения луча по траектории сканирования и, следовательно, ограничено суммарное количество зондирующих импульсов, излучаемых за период сканирования поля обзора. В результате увеличение поля обзора по азимуту неизбежно приводит к его уменьшению по углу места. При регулярном сканировании угол обзора по вертикали должен охватывать все возможные изменения высот рельефа местности в анализируемом диапазоне дальностей в пределах поля обзора, т.е. угол обзора по вертикали ограничен снизу. Указанные ограничения не позволяют увеличить угол обзора системы по азимуту при использовании любого вида регулярного сканирования.
Технической задачей изобретения является повышение информативности способа за счет увеличения поля обзора по азимуту, в пределах которого своевременно формируется информативная составляющая поля дальностей, для обеспечения возможности предотвращения столкновений с препятствиями путем пролонгации безопасных траекторий полета ЛА.
Решение технической задачи или сущность изобретения заключается в том, что в способе [1], основанном на периодическом сканировании окружающего пространства в пределах поля обзора локатора путем такого изменения во времени угловой ориентации узкой диаграммы направленности излучения лазерного локатора с одновременным измерением углов и дальностей при частоте следования зондирующих импульсов несколько десятков килогерц, которое приводит к формированию двумерной траектории сканирования в координатах угол-угол, соответствующей прореженной развертке поля дальностей до подстилающей поверхности с достаточной для обнаружения препятствий плотностью точек зондирования на этих препятствиях, определении на каждом периоде сканирования по результатам измерений углов и дальностей формы рельефа местности и координат препятствий для пролонгации безопасных траекторий полета летательного аппарата, реализации траектории сканирования за время каждого полупериода обновления информации о поле дальностей путем формирования таких фрагментов траектории, которые являются результатом сложения относительно медленного поворота базовой системы координат с постоянным вектором угловой скорости и быстрого двумерного изменения угловой ориентации лазерного луча относительно этой системы координат, дополнительно задают диапазон минимальных дальностей до подстилающей поверхности, соответствующий периоду сканирования, скорости полета и надежному обнаружению всех возможных препятствий, включая провода, тросы и т.п., используют технически реализуемые фрагменты траектории сканирования с управляемыми параметрами, которые могут изменять конфигурацию фрагментов траектории, в том числе их угловую ориентацию в вертикальной плоскости, при многократной реализации фрагментов за время полупериода обновления информации о дальностном поле, т.е. за время медленного поворота базовой системы координат в сторону левой или правой границы поля обзора, в процессе сканирования определяют требуемые параметры каждого следующего фрагмента траектории по результатам обработки имеющихся измерений углов и дальностей так, чтобы угловая ориентация этого фрагмента в вертикальной плоскости соответствовала попаданию прогнозируемых минимальных дальностей в заданный диапазон максимальных дальностей надежного обнаружения всех возможных препятствий, в процессе сканирования формируют сигналы управления исполнительными устройствами так, чтобы реализуемые в текущий момент времени фрагменты траектории имели параметры с минимально возможными отклонениями от требуемых параметров, обеспечивая тем самым в процессе сканирования отрицательную обратную связь в системе автоматического управления угловым положением по вертикали нижних участков, соответствующих минимальным дальностям на траектории сканирования, удерживая эти нижние участки траектории на таких углах наклона зондирующего луча, которые соответствуют заданному диапазону максимальных дальностей.
Новыми признаками, обладающими существенными отличиями по способу является следующая совокупность действий:
1. Задают диапазон минимальных дальностей до подстилающей поверхности, соответствующий периоду сканирования, скорости полета и надежному обнаружению всех возможных препятствий, включая провода, тросы и т.п., используют технически реализуемые фрагменты траектории сканирования с управляемыми параметрами, которые могут изменять конфигурацию фрагментов траектории, в том числе их угловую ориентацию в вертикальной плоскости, при многократной реализации фрагментов за время полупериода обновления информации о дальностном поле, т.е. за время медленного поворота базовой системы координат в сторону левой или правой границы поля обзора.
2. В процессе сканирования определяют требуемые параметры каждого следующего фрагмента траектории по результатам обработки имеющихся измерений углов и дальностей так, чтобы угловая ориентация этого фрагмента в вертикальной плоскости соответствовала попаданию прогнозируемых минимальных дальностей в заданный диапазон максимальных дальностей надежного обнаружения всех возможных препятствий.
3. В процессе сканирования формируют сигналы управления исполнительными устройствами так, чтобы реализуемые в текущий момент времени фрагменты траектории имели параметры с минимально возможными отклонениями от требуемых параметров, обеспечивая тем самым в процессе сканирования отрицательную обратную связь в системе автоматического управления угловым положением по вертикали нижних участков, соответствующих минимальным дальностям на траектории сканирования, удерживая эти нижние участки траектории на таких углах наклона зондирующего луча, которые соответствуют заданному диапазону максимальных дальностей.
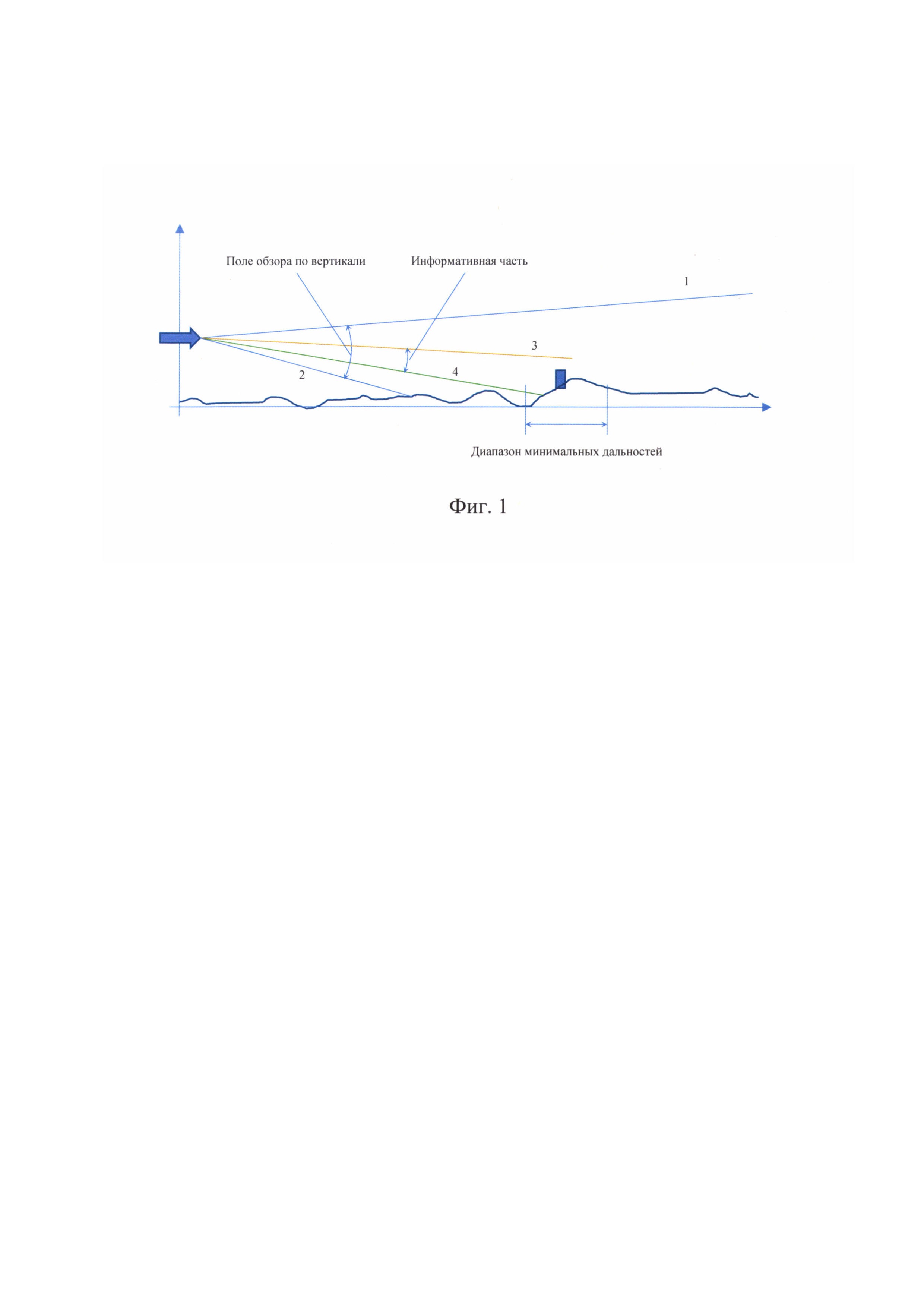
Заявляемый способ позволяет автоматически формировать траекторию сканирования в координатах угол-угол, концентрируя при этом направления измерений дальностей в области положений возможных препятствий над земной поверхностью в заданном диапазоне дальностей при любом рельефе местности. Задание такого диапазона дальностей может быть проведено заранее. Его верхняя граница определяется тактико-техническими требованиями на ЛЛ в части его основной характеристики - максимальной дальности надежного обнаружения тонких протяженных препятствий типа проводов ЛЭП, тросов, растяжек и т.п. в ограниченно-сложных метеоусловиях. Нижняя граница диапазона дальностей рассчитывается как разность между верхней границей и произведением скорости полета ЛА на период обновления информации в пределах поля обзора.
Вышеуказанные отличительные признаки являются существенными, поскольку каждый в отдельности и все совместно направлены на решение поставленной задачи с достижением технического результата - увеличения поля обзора по азимуту, в пределах которого своевременно формируется информативная составляющая поля дальностей, для обеспечения возможности предотвращения столкновений с препятствиями путем пролонгации безопасных траекторий полета ЛА. Использование единой совокупности существенных отличительных признаков в известных технических решениях не обнаружено, что характеризует соответствие рассматриваемого технического решения критерию «новизна».
Рассмотрим возможность решения задачи без использования единой совокупности признаков.
1. Исключение признака 1 или 2 приводит к необходимости увеличения поля обзора по вертикали до объявленных в прототипе, так как отсутствует информация для управления сканированием по углу места. В результате расширение поля обзора по горизонтали становится невозможным.
2. Исключение признака 3 приводит к необходимости увеличения поля обзора по вертикали до объявленных в прототипе, так как отсутствует управление сканированием по углу места. В результате расширение поля обзора по горизонтали становится невозможным.
Следовательно, изложенная выше совокупность новых существенных признаков в сочетании с предложенными в прототипе обеспечивает наиболее эффективное решение поставленной технической задачи с расширением области применения и характеризует предложенное техническое решение существенными отличиями по сравнению с известным уровнем техники, что характеризует соответствие рассматриваемого технического решения критерию «изобретательский уровень».
Заявляемый способ является результатом научно-исследовательской и экспериментальной работы по разработке ЛЛ с адаптивным сканированием.
На фиг. 1 показаны поле обзора по вертикали и его информативная часть. Верхняя граница поля обзора помечена цифрой 1, нижняя - цифрой 2, информативная часть - цифрами 3 и 4.
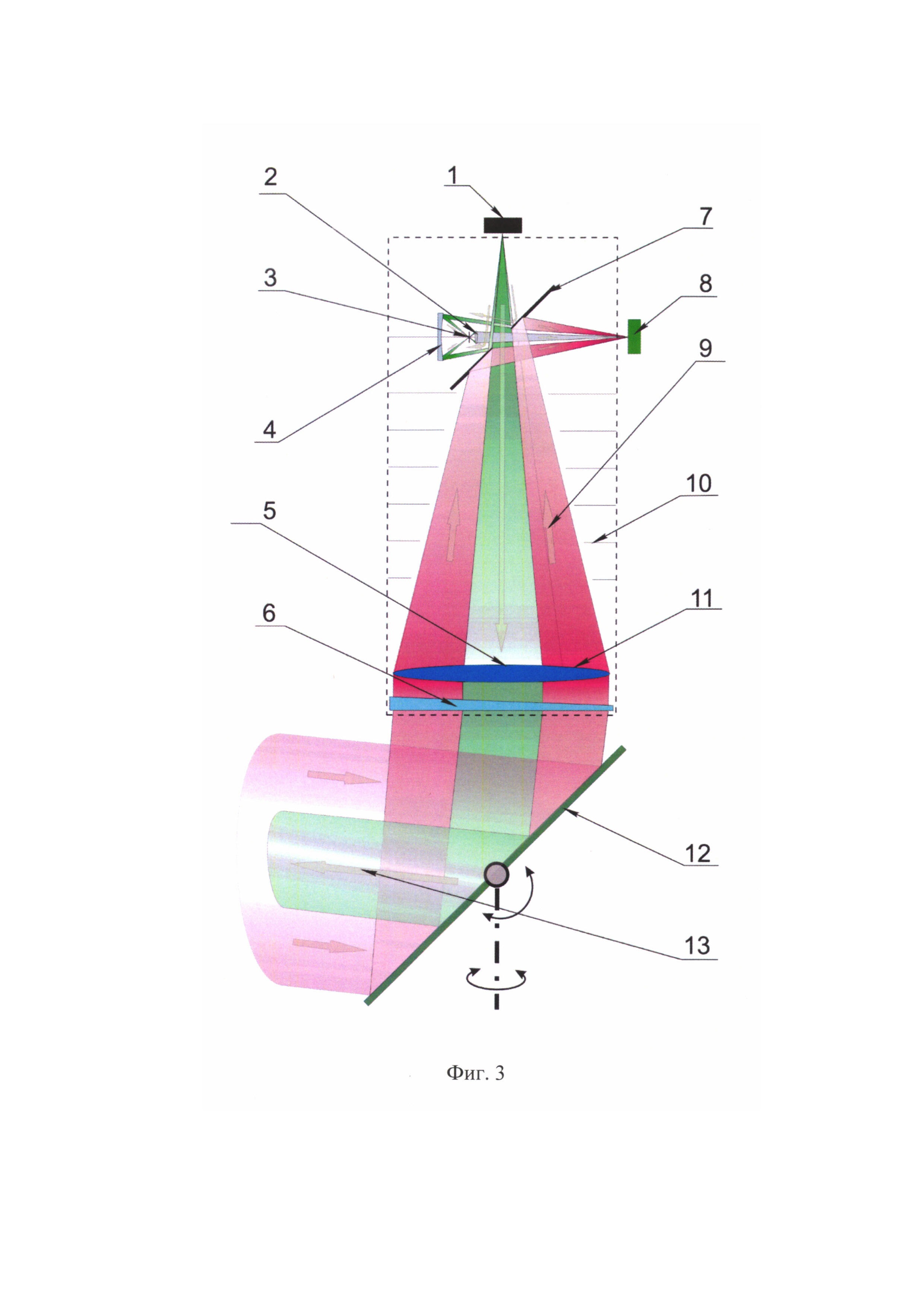
На фиг. 2 сопоставлены поле обзора при регулярном сканировании (зеленый прямоугольник) и поле обзора при выделении информативной области (синий прямоугольник).
Цифрами 1, 2, 3, 4 показаны границы полей обзора и информативной части. Они совпадают с такими же границами на фиг. 1.
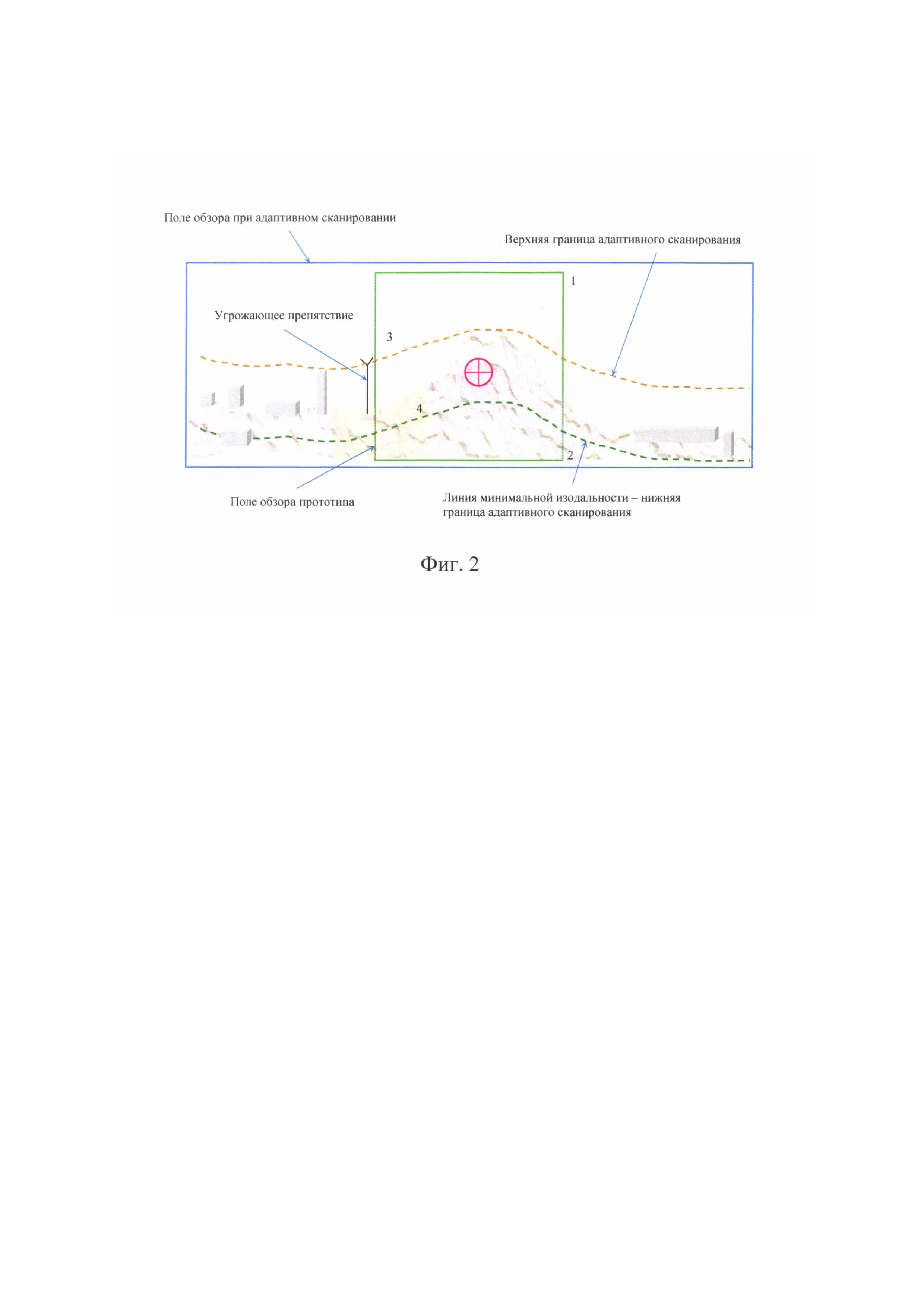
На фиг. 3 представлен один из вариантов оптико-механической реализации заявляемого способа с коаксиальным расположением выходного и входного излучений. На фиг. 3 цифрами обозначены:
5. Лазерный излучатель;
6. Микрообъектив;
7. Диафрагма;
8. Конденсор формирователя оптического импульса синхронизации;
9. Центральная зона излучения двухзонного объектива;
10.Вращающийся клин;
11. Разделитель;
12. ФПУ;
13.Отклик из пространства предметов;
14. Набор бленд;
15. Периферийная зона приема двухзонного объектива;
16. Головное зеркало в карданном подвесе;
17.Основной зондирующий луч.
Способ реализуется следующим образом.
«Медленное вращение» базовой системы координат с постоянным вектором угловой скорости на каждом полупериоде сканирования реализуется движением с постоянной угловой скоростью внешней рамки карданова подвеса, в котором установлен головной дефлектор (например, головное зеркало), изменяющий азимутальное направление диаграмм направленности излучения и приема зондирующих импульсов во внешнем пространстве. «Быстрое» управляемое двумерное движение относительно базовой системы координат может быть реализовано двумя известными путями: оптико-механическим или акустооптическим.
При оптико-механической реализации двумерность обеспечивается непрерывным перемещением диаграмм направленности (ДН) по образующим конуса с углом при вершине, который значительно меньше вертикального размера поля обзора. Такая коническая составляющая движения ДН осуществляется в результате быстрого вращения с постоянной скоростью микрозеркала или оптического клина, установленного на пути лучей между лазером и головным зеркалом так, чтобы ось вращения зеркала или клина была параллельна направлению излучения лазера. Управление направлением ДН осуществляется движением внутренней рамки карданова подвеса головного зеркала и «системой автоматического управления положением нижних участков траектории сканирования», в которой исполнительным устройством является привод внутренней рамки. Таким образом, при оптико-механической реализации способа в процессе сканирования по трохоиде осуществляется управление угловой ориентацией по вертикали нижних участков фрагментов траектории сканирования с динамическими ошибками, возникающими из-за момента инерции головного зеркала и внутренней рамки карданова подвеса. Рассмотрим один из вариантов оптической схемы при оптико-механической реализации заявляемого способа (фиг. 3). Излучение лазера (5), проходя через центральное отверстие разделителя (11), расположенного под углом 45-60 градусов к оси излучения, попадает на центральную область выходного объектива (9). Далее, проходя через вращающийся клин (10), излучение падает на головное зеркало (16) и отражается в пространство предметов. Отверстие в разделителе имеет такой размер, чтобы малая часть периферийной области выходного пучка «срезалась» обратной зеркальной стороной и направлялась на конденсор (8), который фокусирует эту часть излучения на ограничительной диафрагме (7). Далее с помощью проекционного микрообъектива (6) изображение этой диафрагмы проецируется на входную диафрагму фотоприемного устройства (ФПУ) (12), создавая тем самым оптический импульс синхронизации. В состав ФПУ входит диафрагма, интерференционный фильтр и согласующий микрообъектив, для выравнивания размеров диафрагмы и светочувствительного элемента. Схема построена таким образом, что излучение, отраженное от центральной части объектива, которое может вывести из строя ФПУ, на ФПУ не попадет, так как оно уходит в отверстие разделителя (11). Периферийная часть внутренней поверхности объектива перенаправляет отраженное излучение под углами не опасными для ФПУ и гасится блендами (14). Выходной луч, отразившись от предмета (13), попадает в основной объектив, далее попадая на разделитель (11), периферийная его часть отражается на ФПУ. Центральная его часть попадает обратно в излучатель, но так как его мощность несоизмеримо мала с выходной мощностью, то ее воздействие на выходное окно излучателя игнорируется. Учитывая импульсный характер работы ОМБ, наложения выходного и отраженного от предметов излучений не будет, что в противном случае могло бы привести к искажению сигнала, снимаемого с ФПУ. Клин (10), изготовленный из кремния, имеет угол 0,4 градуса, что обеспечивает при показателе преломления 3,4841 радиус вращения зондирующего луча 1 градус. Для предотвращения формирования паразитного излучения и защиты ФПУ от выхода из строя выходная поверхность клина должна быть перпендикулярна оптической оси основного объектива. Внутренняя поверхность основного объектива должна быть выпуклой, что обеспечит перенаправление основной части излучения, отраженного от внутренней поверхности объектива (9), в сторону светопоглощающих бленд. Предлагаемая схема построения реализует заявляемый способ и, кроме того, имеет ряд преимуществ перед прототипом («Obstacle avoidance system for helicopter and other aircraft», Патент USA №5465142 от 7 ноября 1995 г.). Одно и таких существенных преимуществ заключается в том, что как зондирующий луч (17), так и отраженный луч от объекта (13) не проходят сквозь элементы, уменьшающие мощность излучения на их выходе. Имеются ввиду такие оптические элементы, использованные в прототипе, как светоделительные плоскопараллельные пластины и сплиттеры, основанные на поляризационных свойствах лазерного излучения. Эти элементы снижают в два раза мощность выходного зондирующего луча, а затем в два раза отраженную его часть от объекта. Таким образом, эффективная дальность падает в несколько раз, и чтобы это компенсировать, необходимо повышать пиковую мощность лазерного излучателя, что влечет за собой увеличение массогабаритные характеристики системы. В предлагаемой схеме потери мощности зондирующего и отраженного лучей обусловлены исключительно коэффициентами пропускания формирующих элементов оптических систем (объективы, фильтры, клин).
Акустооптическая реализация способа осуществляется путем установки вместо вращающегося микрозеркала или клина двух перпендикулярно ориентированных акустооптических дефлекторов. Акустооптическая реализация способа позволяет практически безынерционно управлять не только угловой ориентацией нижних участков фрагментов траектории сканирования, но и формой этих фрагментов, формируя горизонтальные и вертикальные участки траектории каждого фрагмента так, чтобы максимизировать вероятность пересечения ими контуров объектов и тонких протяженных препятствий, используя результаты обработки имеющихся измерений углов и дальностей. Использование акустооптики вместо оптико-механики при адаптивном сканировании позволяет приблизительно в два раза увеличить поле обзора по азимуту.
Моделирование процессов информационного обеспечения МВП показало, что использование способа адаптивного сканирования позволят пролонгировать безопасные траектории полета ЛА в азимутальном секторе, который в два-четыре раза больше, чем сектор пролонгации безопасных траекторий полета в случае применения регулярного сканирования земной поверхности лучом ЛЛ при одинаковых средних плотностях точек зондирования в информативных областях полей обзора.
Источники информации
1. «Obstacle avoidance system for helicopter and other aircraft», Патент USA №5465142 от 7 ноября 1995 г.
2. Schulz K.R., Scherbarth S., Fabry U. Hellas: obstacle warning system for helicopters // Proc. SPIE. 2002. V.4723. P. 1-8.
3. Gunther Winkle, Hellas Protect helos Defence Helicopter, December 1998 - January 1999, pp. 23-25.
Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета (МВП), основанный на периодическом сканировании окружающего пространства в пределах поля обзора локатора путем такого изменения во времени угловой ориентации узкой диаграммы направленности излучения лазерного локатора с одновременным измерением углов и дальностей, которое приводит к формированию двумерной траектории сканирования в координатах угол-угол, соответствующей прореженной развертке поля дальностей до подстилающей поверхности с достаточной для обнаружения препятствий плотностью точек зондирования на этих препятствиях, определении на каждом периоде сканирования по результатам измерений углов и дальностей формы рельефа местности и координат препятствий для пролонгации безопасных траекторий полета летательного аппарата, реализации траектории сканирования за время каждого полупериода обновления информации о поле дальностей путем формирования таких фрагментов траектории, которые являются результатом сложения относительно медленного поворота базовой системы координат с постоянным вектором угловой скорости и быстрого двумерного изменения угловой ориентации лазерного луча относительно этой системы координат, использовании для быстрого двумерного изменения угловой ориентации лазерного луча фиксированной траектории равномерного движения по окружности в координатах угол-угол, имеющей диаметр, равный вертикальному размеру поля обзора, отличающийся тем, что задают диапазон минимальных дальностей до подстилающей поверхности, соответствующий периоду сканирования, скорости полета и надежному обнаружению всех возможных препятствий, включая провода, тросы и т.п., используют технически реализуемые фрагменты траектории сканирования с управляемыми параметрами, которые могут изменять конфигурацию фрагментов траектории, в том числе их угловую ориентацию в вертикальной плоскости, при многократной реализации фрагментов за время полупериода обновления информации о дальностном поле в процессе сканирования определяют требуемые параметры каждого следующего фрагмента траектории по результатам обработки имеющихся измерений углов и дальностей так, чтобы угловая ориентация этого фрагмента в вертикальной плоскости соответствовала попаданию прогнозируемых минимальных дальностей в заданный диапазон максимальных дальностей надежного обнаружения всех возможных препятствий, в процессе сканирования формируют сигналы управления исполнительными устройствами так, чтобы реализуемые в текущий момент времени фрагменты траектории имели параметры с минимально возможными отклонениями от требуемых параметров.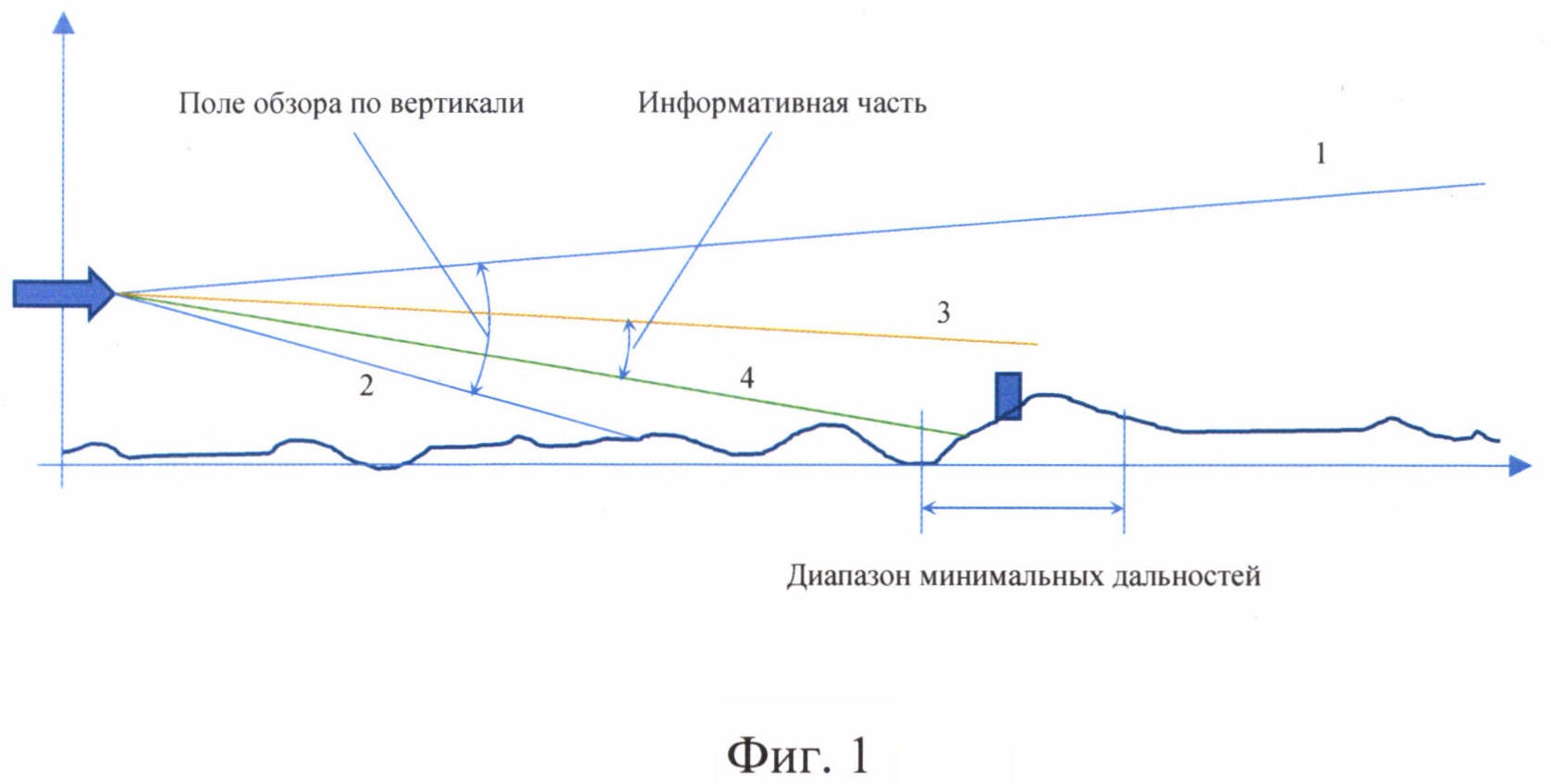
Способ одновременного измерения вектора скорости летательного аппарата и дальности до наземного объекта
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения эффективности фугасного воздействия равных по массе сосредоточенного и дробного рассредоточенного зарядов взрывчатого вещества
Способ определения инициирующей способности дистанционного боеприпаса и устройство для его осуществления
Способ оценки пробивного действия дистанционного боеприпаса и устройство для его осуществления
Способ распознавания класса цели и устройство для его осуществления
Способ распознавания класса цели и устройство для его осуществления
Автомобильная бортовая информационная система

