Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИСТОЧНИК ИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области управления летательными аппаратами (ЛА) и может быть использовано для их гарантированного наведения на наземный источник излучения по известному лишь только пеленгу без определения координат источника.
Известен способ вывода ЛА на незапрограммированную наземную излучающую цель, в соответствии с которым по периметру района боевых действий выбирают произвольные поворотные пункты маршрута (ППМ), определяют их координаты, которые вводят в бортовую вычислительную машину навигационного комплекса ЛА. Координаты НИМ используют для создания единого поля целеуказания, которое позволяет определять координаты любой цели в этом районе относительно каждого из НИМ. Полет на цель, координаты которой выдает пункт управления, осуществляют из одного из НИМ с выходом на линию «ППМ-цель» [Паньков С.Я., Забураев Ю.Е., Матвеев A.M. Теория и методика управления авиацией: учеб. пособие. В 2 ч. Ч. 1. Под общ. ред. В.А. Мещерякова-Ульяновск: УВАУ ГА, 2006. - 190 с. С. 178-182].
Недостаток способа состоит в том, что если координаты незапрограммированной цели неизвестны (известно только направление на цель в момент ее излучения), то строить линию «ППМ-цель» невозможно.
Известен курсовой способ наведения самолета на наземную цель, сущность которого состоит в непосредственном наведении пилотом ЛА на постоянно или периодически излучающий источник [Паньков С.Я., Забураев Ю.Е., Матвеев A.M. Теория и методика правления авиацией: учеб. пособие. В 2 ч. Ч. 1. Под общ. ред. В.А. Мещерякова - Ульяновск: УВАУ ГА, 2006. - 190 с. С. 176-177].
Недостаток способа заключается в отсутствии возможности вывода ЛА на цель, если цель прекратит излучение.
Наиболее близким по технической сущности и достигаемому эффекту (прототип) к предлагаемому способу является маршрутный способ наведения ЛА на цель, заключающийся в пеленговании источника излучения (ИИ), его идентификации как цель, определении курсового угла на источник излучения, построении прямой линии заданного пути (ЛЗП), проходящей через точку пеленгования в направлении источника излучения и выводе ЛА на линию заданного пути с разворотом в сторону ИИ по кратчайшему пути [Паньков С.Я., Забураев Ю.Е., Матвеев A.M. Теория и методика правления авиацией: учеб. пособие. В 2 ч. Ч. 1. Под общ. ред. В.А. Мещерякова - Ульяновск: УВАУ ГА, 2006. - 190 с. С. 177-179].
Недостатком способа является высокая вероятность выхода ЛА на ЛЗП за источником излучения, что обусловлено увеличением радиуса разворота ЛА при больших курсовых углах на источник излучения и скоростях ЛА.
Техническим результатом настоящего изобретения является исключение вывода летательного аппарата за источник излучения за счет его выхода на прямую линию заданного пути с нулевым курсовым углом на источник излучения до точки, находящейся на данной прямой до точки пеленгования.
Указанный результат достигается тем, что в известном способе наведения летательного аппарата на источник излучения, заключающийся в пеленговании источника излучения, его идентификации как цель, определении курсового угла на источник излучения, построении прямой линии заданного пути, проходящей через точку пеленгования в направлении источника излучения, и выводе летательного аппарата с разворотом на линию заданного пути с нулевым курсовым углом на источник излучения, согласно изобретению определяют скорость летательного аппарата и минимально допустимый для этой скорости радиус разворота, рассчитывают точку начала и радиус разворота летательного аппарата, выполняют прямолинейный полет до расчетной точки начала разворота, вывод летательного аппарата на линию заданного пути осуществляют по окружности с расчетным радиусом с разворотом в противоположную сторону от источника излучения.
Сущность изобретения заключается в том, что определяют скорость ЛА и минимально допустимый для этой скорости радиус разворота, рассчитывают точку начала и радиус разворота летательного аппарата, выполняют прямолинейный полет до расчетной точки начала разворота, вывод летательного аппарата на линию заданного пути осуществляют по окружности с расчетным радиусом с разворотом в противоположную сторону от ИИ.
Сущность изобретения поясняется фигурой, где представлены взаимное расположение ЛА и ИИ в плоскости. На фигуре обозначены:
1 - вектор скорости ЛА до начала разворота;
2 - местоположение ИИ;
3 - прямая линия заданного пути;
4.1, 4.2 - маршрут ЛА при наведении на ИИ по способу-прототипу для случая малого и большого курсовых углов на ИИ в момент его пеленгования, соответственно;
4.3 - маршрут ЛА при наведении на ИИ по предлагаемому способу;
XOY - местная декартовая система координат с центром, совпадающим с местом расположения ЛА в момент пеленгования ИИ; N - точка начала разворота ЛА; O1 - центр окружности разворота ЛА при полете с использованием предлагаемого способа; Pm - точка перехода ЛА в разворот в другую сторону для плавного выхода на ЛЗП с использованием способа-прототипа; K, Km - точки выхода ЛА на ЛЗП с использованием предлагаемого и способа-прототипа, соответственно; ψ - курс ЛА в момент пеленгования ИИ; θ - азимут ИИ; r - радиус разворота ЛА.
Из фигуры видно, что при выводе ЛА на ЛЗП с разворотом на ИИ по кратчайшему пути (прототип) возможен выход ЛА как до ИИ (маршрут 4.1 на фигуре), так и за ИИ (маршрут 4.2 на фигуре). Вероятность выхода ЛА за ИИ определяется радиусом разворота ЛА. Чем выше скорость ЛА и больше курсовой угол на ИИ, а соответственно и радиус разворота, тем выше эта вероятность.
Согласно заявленному изобретению вывод ЛА на ЛЗП осуществляют с разворотом в противоположную от ИИ сторону по окружности с радиусом, определяемым скоростью ЛА и курсовым углом на ИИ (маршрут 4.3 на фигуре). При этом точка K выхода ЛА на ЛЗП является точкой касания окружности разворота с ЛЗП, т.е. ЛА при выводе по данной окружности выходит на ЛЗП сразу с нулевым курсовым углом на ИИ. Так как точка пеленгования ИИ О лежит на пересечении прямых ЛЗП и линии маршрута ЛА до начала разворота, являющихся касательными к окружности разворота, то ЛА при любых скоростях и курсовых углах на ИИ выходит на ЛЗП до точки пеленгования ИИ О (см. фигуру), а значит и гарантированно до ИИ, то есть вероятность выхода ЛА на ЛЗП после ИИ равна 0. Этим достигается указанный в изобретении технический результат.
Способ может быть реализован следующим образом.
1) ЛА совершает полет. При наличии излучения от ИИ с помощью пеленгатора на борту идентифицируют его. При классификации источника как цель измеряют курсовой угол на него (θ-ψ) и скорость ЛА V. Строят прямую ЛЗП.
2) С учетом минимально допустимого радиуса разворота для данного типа ЛА rmin, который может быть выбран исходя из допустимой угловой скорости разворота ЛА [Справочник летчика и штурмана. Под ред. В.М. Лавского. М: Воениздат, 1974, с. 372-373], рассчитывают промежуток времени Δt с момента пеленгования источника излучения T0 до начала разворота Tr  и радиус разворота r=V⋅Δt⋅tg(α), где V - скорость ЛА;
и радиус разворота r=V⋅Δt⋅tg(α), где V - скорость ЛА;  При этом принято, что ЛА будет совершать разворот с постоянным радиусом по окружности с центром O1 (см. фигуру). Поскольку вектор скорости ЛА является касательной к данной окружности, центр которой перпендикулярен к начальному курсу самолета, то координата O1=N+i⋅r⋅ехр(i⋅ψ).
При этом принято, что ЛА будет совершать разворот с постоянным радиусом по окружности с центром O1 (см. фигуру). Поскольку вектор скорости ЛА является касательной к данной окружности, центр которой перпендикулярен к начальному курсу самолета, то координата O1=N+i⋅r⋅ехр(i⋅ψ).
Для расчетов принято комплексное представление координат  где
где  - реальная часть, абсцисса,
- реальная часть, абсцисса,  - мнимая часть, ордината, i - мнимая единица, arg(⋅) - аргумент комплексного числа (фаза), заключенного в скобки.
- мнимая часть, ордината, i - мнимая единица, arg(⋅) - аргумент комплексного числа (фаза), заключенного в скобки.
3) Определяют точку начала разворота ЛА с учетом того, что до этого ЛА совершает прямолинейный полет с выдерживанием постоянного курса:
N=O+V⋅Δt⋅exp(i⋅ψ).
4) По завершению расчетов выводят ЛА на ЛЗП по выбранному маршруту, а именно первоначально выполняют прямолинейный полет с постоянной скоростью до точки N, затем осуществляют разворот в противоположную сторону от ИИ с рассчитанным радиусом разворота г до точки K на ЛЗП (см. фигуру).
Таким образом, предложенное техническое решение позволяет решить поставленную техническую задачу: выход летательного аппарата на прямую линию заданного пути с нулевым курсовым углом на источник излучения до точки, находящейся на данной прямой до точки пеленгования.
Дополнительным достоинством способа является возможность наведения летательного аппарата на кратковременно и не периодически излучающий источник только по одному известному пеленгу на него.
Способ наведения летательного аппарата на источник излучения, заключающийся в пеленговании источника излучения, его идентификации как цели, определении курсового угла на источник излучения, построении прямой линии заданного пути, проходящей через точку пеленгования в направлении источника излучения, и выводе летательного аппарата с разворотом на линию заданного пути с нулевым курсовым углом на источник излучения, отличающийся тем, что для расчета используют местную декартову систему координат с центром, совпадающим с местом расположения летательного аппарата в момент пеленгования источника излучения, обеспечивают выход летательного аппарата на линию заданного пути до точки пеленгования источника излучения при любых скоростях и курсовых углах, для чего определяют скорость летательного аппарата и минимально допустимый для этой скорости радиус разворота, рассчитывают точку начала и радиус разворота летательного аппарата, выполняют прямолинейный полет до расчетной точки начала разворота, вывод летательного аппарата на линию заданного пути осуществляют по окружности с расчетным радиусом с разворотом в противоположную сторону от источника излучения.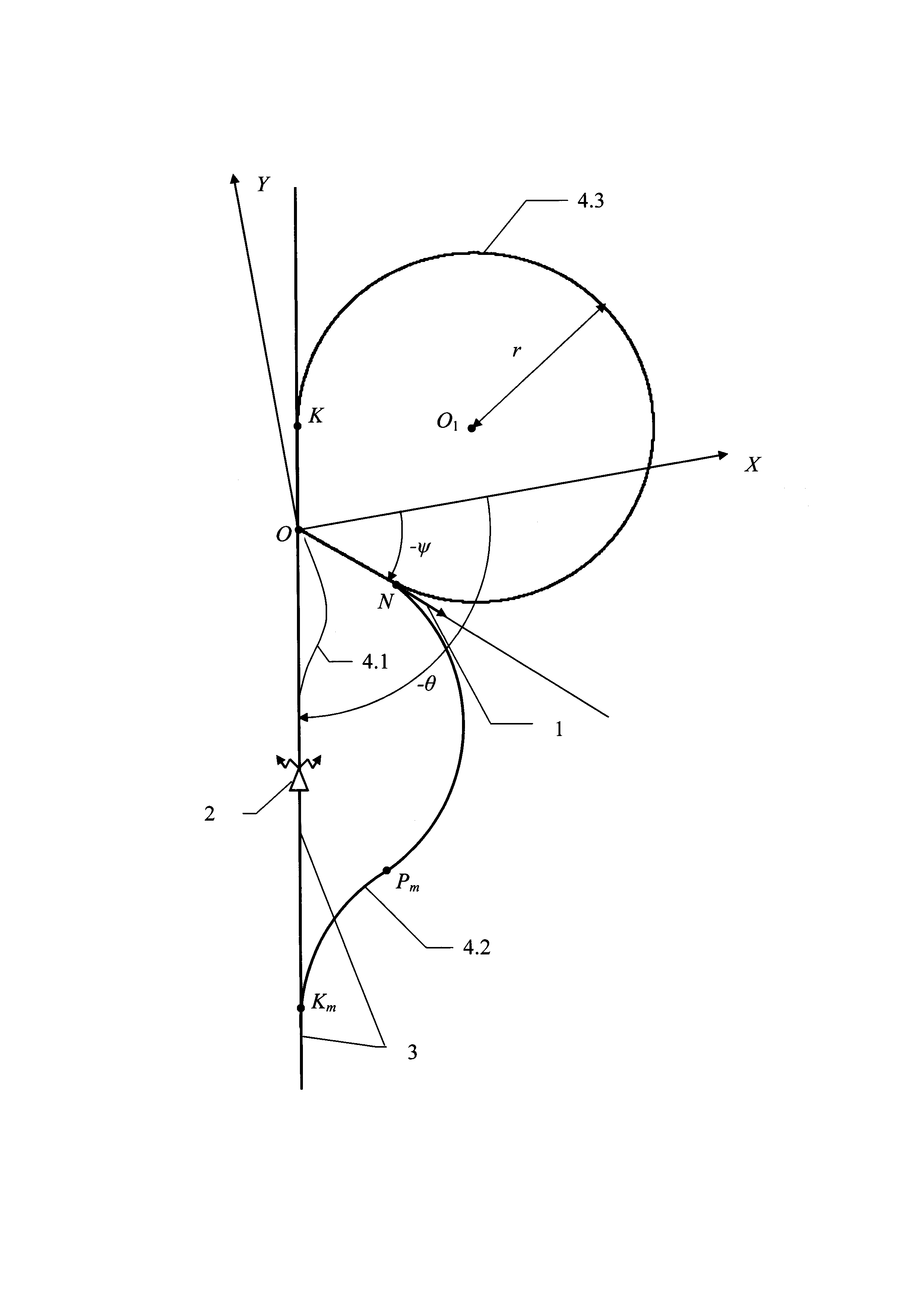
Способ тушения пожара в замкнутых помещениях складов боеприпасов
Способ скрытия оптико-электронного средства воздушного комплекса оптико-электронного наблюдения
Способ формирования радиолокационных изображений в рлс с синтезированной апертурой антенны с предварительной фокусировкой и устройство его реализующее
Способ контроля для функциональной реконфигурации вычислительной системы
Неконтактный оптический взрыватель мины
Оборудование для очистки светосигнальных огней аэродрома
Способ комплексирования цифровых многоспектральных полутоновых изображений
Битумно-полимерная герметизирующая композиция
Входное устройство прямоточного воздушно-реактивного двигателя
Входное устройство прямоточного воздушно-реактивного двигателя
Пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем
Система продольного управления летательного аппарата
Способ контроля для функциональной реконфигурации вычислительной системы
Неконтактный оптический взрыватель мины
Способ открытой изолированной нормотермической химиоперфузии головы и шеи
Входное устройство прямоточного воздушно-реактивного двигателя
Входное устройство прямоточного воздушно-реактивного двигателя
Способ открытой и эндоваскулярной перфузии головы и шеи
Способ открытой и эндоваскулярной перфузии головы и шеи
Способ определения дальности до наземного источника излучения с самолета, оснащенного азимутальным фазовым пеленгатором

