Результат интеллектуальной деятельности: БЕСПРОВОДНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ УГОЛЬНОГО КОМБАЙНА И СПОСОБ ВЫРУБКИ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к системе определения положения угольного комбайна и способу вырубки с его помощью и, в частности, к системе беспроводного определения положения, основанной на изменении деформации зубчатой рейки скребкового конвейера, и соответствующему способу вырубки.
Уровень техники
В процессе добычи угля условия работы полностью механизированного угледобывающего забоя жесткие, и на них влияют такие факторы, как слишком длинная поверхность забоя, обилие пылевых частиц, слабая освещенность и т. д., поэтому создание системы безоператорного автоматизированного мониторинга оборудования представляет собой проблему, которая требует срочного решения. Для оборудования, обслуживающего три машины, велика мобильность положения угольного комбайна, изменчивость траектории продвижения значительна, а ее точное позиционирование трудно поддерживать постоянным.
Существующая технология определения положения угольного комбайна использует метод одометра трека, метод расчета зубчатых передач, метод инфракрасной корреляции, метод ультразвукового отражения, метод беспроводной сети и т. д.; устройство контроля обычно расположено на угольном комбайне, соответственно, когда угольный забой разрезается с помощью угольного комбайна, трудно избежать повреждения оборудования и ошибок данных измерения датчиков ввиду воздействия большого количества добываемого угля и пыли, что делает их надежность чрезвычайно низкой.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является обеспечить надежную, применимую, простую и реализуемую беспроводную систему определения положения угольного комбайна на основе изменения деформации зубчатой рейки и способ вырубки.
Указанная цель настоящего изобретения достигается следующим образом:
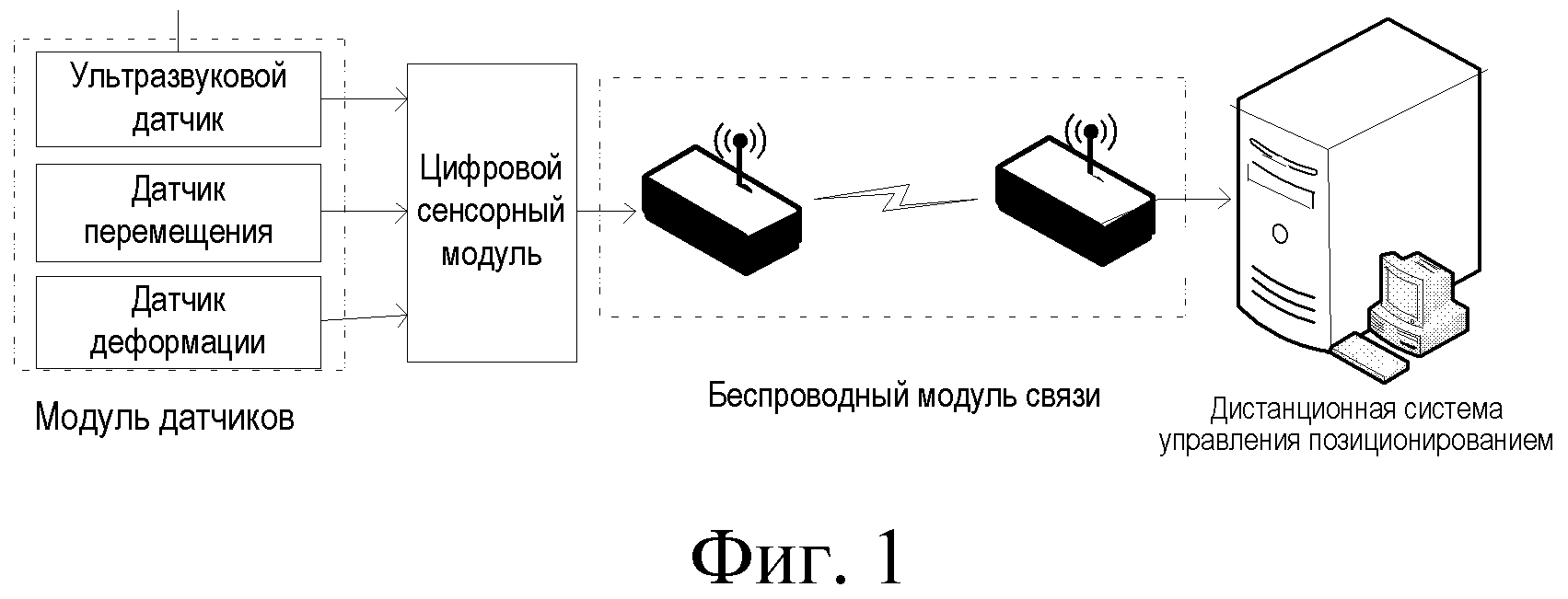
беспроводная система определения положения угольного комбайна содержит модуль датчиков, цифровой сенсорный модуль, модуль беспроводной связи и систему дистанционного управления позиционированием; модуль датчиков соединен со входом модуля беспроводной связи с помощью цифрового сенсорного модуля, а выход модуля беспроводной связи выполнен с возможностью соединения с микропроцессором компьютерной системы дистанционного управления позиционированием.
Модуль датчиков содержит ультразвуковой датчик, датчик перемещения и тензометрический датчик; ультразвуковой датчик расположен в одном и том же месте на основании каждой гидравлической опоры скребкового конвейера и выполнен с возможностью измерения расстояний между гидравлическими опорами и угольной стенкой; датчик перемещения расположен внутри толкающего масляного цилиндра каждой гидравлической опоры и выполнен с возможностью определения расстояния выталкивания скребкового лотка скребкового конвейера; тензометрический датчик расположен на поверхности зуба зубчатой рейки между подкладками зубчатой рейки скребковых лотков посредством технологии SMT (технология поверхностного монтажа) и выполнен с возможностью выработки сигнала деформации зубчатой рейки.
Цифровой сенсорный модуль выполнен с возможностью сбора и обработки сигналов
датчиков.
Модуль беспроводной связи использует беспроводную технологию Wi-Fi и состоит из двух частей, а именно: роутера беспроводной передачи и роутера беспроводного приема компьютерной системы дистанционного управления позиционированием, и выполнен с возможностью передачи по беспроводной сети данных в микропроцессор компьютерной системы дистанционного управления позиционированием.
Система дистанционного управления позиционированием использует промышленное управляющее программное обеспечение WINCC в качестве ядра для экранного мониторинга и использует микросхему ARM в качестве микропроцессора, для обработки, записи и отображения данных сигналов.
Способ беспроводного определения положения угольного комбайна, включает следующие этапы, на которых:
а) последовательно нумеруют скребковые лотки скребкового конвейера по направлению движения угольного комбайна, причем каждый скребковый лоток имеет собственный номер, а соответствующие им гидравлические опоры имеют такие же номера;
b) получают информацию о пространственном положении скребковых лотков: после завершения выталкивающего действия скребковых лотков скребковый лоток на концевой головке используется в качестве опорного для получения положения в горизонтальном направлении каждого скребкового лотка; при этом расстояние между угольным комбайном и угольной стенкой определяется с помощью ультразвукового датчика, а с датчика перемещения, расположенного внутри толкающего масляного цилиндра, получают информацию о толкающем расстоянии каждого скребкового лотка и информацию о положении каждого скребкового лотка в вертикальном направлении; цифровой сенсорный модуль обрабатывает и преобразует сигналы датчиков в сигналы данных и передает сигналы данных в микропроцессор компьютерной системы дистанционного управления позиционированием через модуль беспроводной связи, а микропроцессор далее обрабатывает сигналы данных и записывает, организует и отображает информацию о положении скребкового лотка с каждым номером;
c) выполняют определение положения угольного комбайна: при продвижении угольного комбайна зубцы ходового колеса угольного комбайна взаимодействуют с зубцами зубчатой рейки на скребковом лотке; когда зубцы ходового колеса сцепляются с зубцами, на которых расположен тензометрический датчик, вырабатывается сигнал деформации зубчатой рейки, который передается в микропроцессор через модуль беспроводной связи, на основании указанного сигнала деформации зубчатой рейки посредством микропроцессора определяется номер скребкового лотка, соответствующего указанному зубу, взаимодействующему с зубцами ходовых колес и определяется положения скребкового лотка с указанным номером в вертикальном и горизонтальном направлении, и, далее посредством микропроцессора определяется положение угольного комбайна как положение указанного скребкового лотка;
d) шаги а)-с) повторяются, а положение угольного комбайна определяется в режиме реального времени.
Поскольку вышеупомянутая схема освоена, то изобретение имеет следующие преимущества: после окончания процесса проходки комбайна, информация о пространственном положении каждого скребкового лотка передается с помощью ультразвукового датчика и датчика перемещения за одно действие, и положение угольного комбайна получается в реальном времени на основе информации обратной связи о деформации зубчатой рейки; система и способ являются надежными, применимыми, простыми и выполнимыми.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показана диаграмма, дающая информацию о пространственном положении угольного комбайна в соответствии с настоящим изобретением.
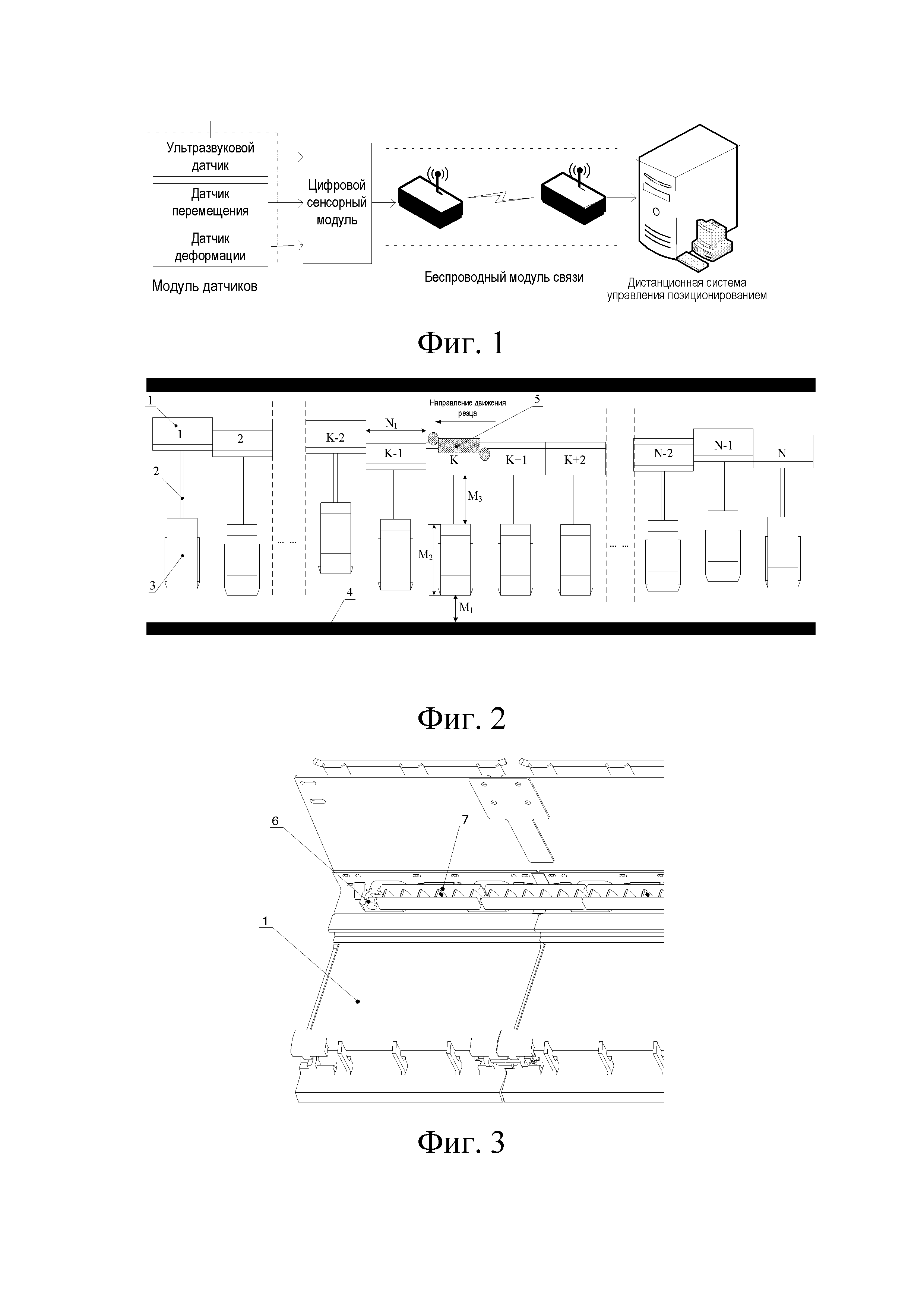
На фиг. 2 представлена схема расположения тензометрического датчика в соответствии с настоящим изобретением.
На фиг. 3 представлена композиционная схема системы определения положения угольного комбайна в соответствии с настоящим изобретением.
Обозначения на рисунках: 1. Скребковый лоток; 2. Толкающий масляный цилиндр; 3. Гидравлическая опора; 4. Угольная стенка; 5. Угольный комбайн; 6. Подкладка направляющей скребкового лотка; 7. Расположение тензометрического датчика.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Беспроводная система определения положения угольного комбайна, содержащая модуль датчиков, цифровой сенсорный модуль, модуль беспроводной связи и систему дистанционного управления позиционированием; модуль датчиков соединен с входом модуля беспроводной связи через цифровой сенсорный модуль, а выход модуля беспроводной связи соединен с компьютерной системой дистанционного управления позиционированием.
Модуль датчиков содержит ультразвуковой датчик, датчик перемещения и тензометрический датчик; ультразвуковой датчик расположенный в одном и том же положении на основании каждой гидравлической опоры 3 и используется для измерения расстояния между гидравлической опорой 3 и угольная стенка 4; датчик перемещения расположен внутри толкающего масляного цилиндра 2 каждой гидравлической опоры и используется для определения расстояния выталкивания скребкового лотка 1; тензометрический датчик крепится на поверхности зубца зубчатой рейки между прокладками 6 направляющей каждого скребкового лотка способом SMT (технологии поверхностного монтажа) и используется для получения информации обратной связи о рабочем положении угольного комбайна, причем тензометрический датчик не закреплен на зубчатой рейке между соседними скребковыми лотками, чтобы обеспечить точность получения информации о положении угольного комбайна 5.
Цифровой сенсорный модуль выполнен с возможностью сбора и обработки сигналов датчиков.
Модуль беспроводной связи использует беспроводную технологию Wi-Fi, состоящую из двух частей, а именно: роутера беспроводной передачи и роутера беспроводного приема компьютерной системы дистанционного управления позиционированием.
Компьютерная система управления дистанционным позиционированием использует промышленное управляющее программное обеспечение WINCC в качестве ядра для экранного мониторинга и использует микросхему ARM в качестве микропроцессора обработки, записи и отображения данных сигналов.
Способ беспроводного определения положения очистного комбайна, включающий следующие этапы:
а) скребковые лотки скребкового конвейера последовательно нумеруются по направлению движения угольного комбайна, причем каждый скребковый лоток имеет собственный номер, а соответствующие им гидравлические опоры имеют такие же номера;
b) получают информацию о пространственном положении скребковых лотков: когда выполняется толкающее действие скребковых лотков, скребковый лоток на концевой головке используется в качестве опорного для получения положения горизонтального направления каждого скребкового лотка; при этом расстояние между угольным комбайна и угольной стенкой определяется с помощью ультразвукового датчика, а с датчика перемещения внутри толкающего масляного цилиндра получают информацию о толкающем расстоянии каждого скребкового лотка и информацию о положении в вертикальном направлении каждого скребкового лотка; цифровой сенсорный модуль обрабатывает и преобразует сигналы датчиков в сигналы данных и передает сигналы данных в микропроцессор компьютерной системы дистанционного управления позиционированием с помощью модуля беспроводной связи, а микропроцессор далее обрабатывает сигналы данных и записывает, организует и отображает информацию о
положении скребкового лотка с каждым номером;
c) определяют положение угольного комбайна: при движении угольного комбайна, зубцы ходового колеса взаимодействуют с зубцами зубчатой рейки на скребковом лотке; когда зубцы ходового колеса взаимодействуют с зубцами, на которых расположен тензометрический датчик, вырабатывается сигнал деформации зубчатой рейки, который передается в микропроцессор через модуль беспроводной связи, на основании указанного сигнала деформации зубчатой рейки посредством микропроцессора определяется номер скребкового лотка, соответствующего указанному зубу, взаимодействующему с зубцами ходовых колес, и определяется положение скребкового лотка в горизонтальном и вертикальном направлении, и далее посредством микропроцессора определяется положение угольного комбайна как положение указанного скребкового лотка;
d) шаги а)–с) повторяются, а положение угольного комбайна определяется в режиме
реального времени.
Далее настоящее изобретение будет пояснено со ссылкой на прилагаемые чертежи.
Исполнение 1:
На фиг. 1 система беспроводного определения положения угольного комбайна,
содержащая сенсорный модуль, цифровой сенсорный модуль, модуль беспроводной связи и компьютерную систему дистанционного управления позиционированием; модуль датчиков содержит ультразвуковой датчик, датчик перемещения и тензометрический датчик; цифровой сенсорный модуль используется для сбора и обработки сигналов датчиков; модуль беспроводной связи использует беспроводную Wi-Fi технологию и состоит из двух частей, а именно роутера беспроводной передачи и роутера беспроводного приема, и может осуществлять беспроводную передачу данных в компьютерную систему дистанционного управления позиционированием; компьютерная система дистанционного управления позиционированием использует промышленное программное обеспечение WINCC в качестве ядра для экранного мониторинга и использует микросхему ARM в качестве микропроцессора обработки, записи и отображения сигналов данных.
Как показано на фиг. 2 и 3, ультразвуковой датчик расположен в одном и том же положении на основании каждой гидравлической опоры 3 и выполнен с возможностью измерения расстояния между гидравлической опорой 3 и угольной стенкой 4; датчик перемещения расположен внутри толкающего масляного цилиндра 2 каждой гидравлической опоры и выполнен с возможностью определения расстояния выталкивания скребкового лотка 1; тензометрический датчик расположен на поверхности зубца зубчатой рейки между подкладками 6 зубчатой рейки каждого скребкового лотка посредством технологии поверхностного монтажа (SMT) и выполнен с возможностью выработки сигнала обратной связи о положении угольного комбайна при движении, а тензометрический датчик не крепится на зубчатой рейке между соседними скребковыми лотками, чтобы обеспечить точность получения информации о положении угольного комбайна.
Как показано на фиг. 2 и 3, способ беспроводного позиционирования очистного комбайна содержит следующие конкретные этапы:
а) скребковые лотки скребкового конвейера последовательно нумеруются в направлении движения угольного комбайна: 1, 2, ..., N-1 и N, где каждый скребковый лоток имеет независимый номер, а соответствующие гидравлические опоры и скребковые лотки имеют такие же номера;
b) получение информации о пространственном распределении: когда толкающее действие скребковых лотков завершено, скребковый лоток № 1 на концевой головке используется в качестве опорного для скребкового лотка № K, длина скребкового лотка равна N1, а полученное положение в горизонтальном направлении скребкового лотка составляет Nk = K * N1; расстояние M1 между угольным комбайном и угольной стенкой определяется с помощью ультразвукового датчика, датчик перемещения внутри толкающего масляного цилиндра может запрашивать выталкивающее расстояние M2 каждого скребкового лотка и длину M3 основания гидравлической опоры, так что можно получить вертикальное положение каждого скребкового лотка Mk = M1 + M2 + M3;
цифровой сенсорный модуль преобразует сигналы датчиков в сигналы данных и передает сигналы данных в микропроцессор компьютерной системы дистанционного управления позиционированием через модуль беспроводной связи, компьютерная система дистанционного управления позиционированием дополнительно обрабатывает сигналы данных, положение скребкового лотка задается (Nk, Mk), скребковые лотки № 1, 2, ..., N-1 и N расположены последовательно, и информация о данных записывается, организуется и отображается для получения информации о пространственном положении каждого скребкового лотка;
c) определение положения угольного комбайна: при движении угольного комбайна 5 зубцы ходового колеса угольного комбайна сцепляются с зубцами зубчатой рейки на скребковом лотке; когда зубцы ходового колеса сцепляются с зубцами, на которых установлен тензометрический датчик, компьютерная система дистанционного позиционирования может определять номер i скребкового лотка, к которому подходит угольный комбайн, с помощью принятого сигнала обратной связи, и на основании номера i скребкового лотка, может быть определено горизонтальное и вертикальное положение (Ni, Mi) скребкового лотка, соответствующее зубцу, взаимодействующему с ходовым колесом, и далее может быть определено положение угольного комбайна; и
d) шаги а)-с) повторяются, а положение угольного комбайна определяют в режиме реального времени.
Стыковочная платформа шахтного подъемника, подходящая для гибкой направляющей, и способ стыкования для шахтного подъемника
Способ и устройство для контролирования состояний выравнивания натяжения и регулировки смещения стальных проволочных канатов многоканатного подъёмника
Сброс давления пневматического взрыва высокого давления и способ усиления передачи
Тормозная буферная система предотвращения падения для высокоскоростного шахтного лифта
Затвердевающий пеноматериал, содержащий угольную золу, для предотвращения самовозгорания угля и способ его получения
Неорганический отвержденный пеноматериал для остановки течей на поверхности в районе добычи угля в пласте неглубокого залегания и способ его получения
Устройство для регулирования положения промежуточной корпусной детали крупной двухуровневой клети и способ регулирования и перемещения этой детали
Крупнотоннажный устанавливаемый на криволинейной направляющей разгрузочный скип, имеющий внешний привод и удлиненную конструкцию
Устройство и способ определения натяжения на направляющем канате висячих подмостей при строительстве шахты
Саморегенеративное интегрированное устройство для синергетического окисления газа низкой концентрации и вентиляционного газа в угольной шахте
Плавильный тигель и аппарат и способ сбора флотационной пены в плавильном тигле
Способ корреляционного моделирования нарушения соединения критических компонентов подъемника для глубокой скважины в условиях неполной информации
Система и способ динамического определения и коррекции параметров управления
Устройство и способ для распределенного определения прямолинейности рабочей поверхности скребкового конвейера на основе волоконно-оптического измерения
Многоступенчатый многоцелевой гидравлический нагнетатель с регулируемой скоростью нагнетания
Механическая муфта дождевальной машины барабанного типа и способ ее применения

