Результат интеллектуальной деятельности: Транспортное устройство (варианты) и способ управления транспортным устройством
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Электрические велосипеды могут использоваться в качестве основного источника и/или вспомогательного источника транспортировки. Например, в качестве основного источника транспортировки, пользователь может передвигаться на электрическом велосипеде из отправного пункта в конечный пункт назначения. Отправной пункт, например, может быть местожительством водителя, а конечный пункт назначения, например, может быть местом работы. Электрический велосипед может быть более компактным, чем другие виды транспорта, и, по существу, может легче подвергаться маневру в перегруженных зонах, таких как плотные торговые районы, которые привлекают интенсивный поток транспорта в рабочее время. В качестве вспомогательного источника транспортировки, электрический велосипед может перевозиться в транспортном средстве, например, автомобиле, поезде, и т.д., из отправного пункта в другое место, такое как место стоянки. Оставшаяся часть поездки может выполняться посредством езды на велосипеде из промежуточного места в конечный пункт назначения. Например, место стоянки может быть перехватывающей парковкой, расположенной на окраинах перегруженной торговой зоны.
Однако, некоторые недостатки электрических велосипедов могут затруднять эксплуатацию электрического велосипеда в конкретных зонах, таким образом, вынуждая водителя электрического велосипеда слезать с электрического велосипеда и проводить пешком электрический велосипед через такие зоны. Например, некоторые зоны запрещают эксплуатацию любого типа велосипеда и ограничивают движение ходьбой и инвалидными эквивалентами. Перегруженные огороженные зоны, например, железнодорожные вокзалы, могут запрещать эксплуатацию велосипедов. В дополнение, размер и форма велосипедов могут делать перевозку велосипедов трудной на общественном транспорте, например, в поездах, метро, и т.д.
По существу, остается благоприятная возможностью сконструировать транспортное устройство, которое включает в себя функцию велосипеда, но также удобно и легко эксплуатируется в зонах, где эксплуатация велосипедов запрещена.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагается транспортное устройство, содержащее: раму, складываемую между велосипедной конфигурацией и конфигурацией личного транспортера; датчик, выполненный с возможностью распознавать, когда рама находится в по меньшей мере одной из велосипедной конфигурации и конфигурации личного транспортера; первое колесо и второе колесо, каждое из которых с возможностью вращения присоединено к раме; первый двигатель, присоединенный к первому колесу, и второй двигатель, присоединенный ко второму колесу; и контроллер, запрограммированный давать команду первому двигателю вращаться в первом направлении в ответ на сигнал из датчика, что рама находится в велосипедной конфигурации, и давать команду первому двигателю вращаться во втором направлении, противоположном первому направлению, в ответ на сигнал из датчика, что рама находится в конфигурации личного транспортера. Причем рама включает в себя основной сегмент и по меньшей мере одну опору для ног, выдвижную относительно основного сегмента в конфигурацию личного транспортера и убираемую относительно основного сегмента в велосипедную конфигурацию. Причем датчик выполнен с возможностью распознавать положение опоры для ног относительно основного сегмента. Причем основной сегмент включает в себя средний сегмент, задний сегмент, шарнирно соединенный со средним сегментом, и передний сегмент, шарнирно соединенный со средним сегментом, расположенный на определенном расстоянии от заднего сегмента, передний сегмент и задний сегмент являются подвижными относительно среднего сегмента между велосипедной конфигурацией и конфигурацией личного транспортера. Причем датчик выполнен с возможностью распознавать положение опоры для ног относительно основного сегмента, и дополнительно содержащее второй датчик, выполненный с возможностью распознавать положение по меньшей мере одного из переднего сегмента и заднего сегмента относительно среднего сегмента. Причем рама включает в себя основной сегмент и рукоятку личного транспортера, выдвижную относительно основного сегмента в конфигурацию личного транспортера и убираемую относительно основного сегмента в велосипедную конфигурацию. Причем датчик выполнен с возможностью распознавать положение рукоятки личного транспортера относительно основного сегмента. Причем основной сегмент включает в себя средний сегмент, задний сегмент, шарнирно соединенный со средним сегментом, и передний сегмент, шарнирно соединенный со средним сегментом, расположенный на определенном расстоянии от заднего сегмента, передний сегмент и задний сегмент являются подвижными относительно среднего сегмента между велосипедной конфигурацией и конфигурацией личного транспортера. Причем датчик выполнен с возможностью распознавать положение рукоятки личного транспортера относительно основного сегмента, и дополнительно содержащее второй датчик, выполненный с возможностью распознавать положение по меньшей мере одного из переднего сегмента и заднего сегмента относительно среднего сегмента. Причем рама включает в себя опору для ног, выдвижную относительно основного сегмента в конфигурацию личного транспортера и убираемую относительно основного сегмента в велосипедную конфигурацию, и дополнительно содержащее третий датчик, выполненный с возможностью распознавать положение опоры для ног относительно основного сегмента. Причем рама включает в себя руль велосипеда, выдвижной относительно основного сегмента в велосипедную конфигурацию и убираемый относительно основного сегмента в конфигурацию личного транспортера. Причем первый двигатель и второй двигатель являются электродвигателями, и транспортное средство дополнительно содержит аккумуляторную батарею на связи с первым двигателем и вторым двигателем. Транспортное устройство дополнительно содержит гироскоп на связи как с первым двигателем, так и вторым двигателем. Причем второй двигатель вращается в общем направлении как в велосипедной конфигурации, так и в конфигурации личного транспортера.
Также предлагается способ управления транспортным устройством, включающим в себя раму, складываемую между велосипедной конфигурацией и конфигурацией личного транспортера, первое и второе колесо, каждое из которых с возможностью вращения присоединено к раме, первый двигатель, присоединенный к первому колесу, и второй двигатель, присоединенный ко второму колесу, способ состоит в том, что: принимают сигнал с первого датчика, указывающий, что рама находится в одной из велосипедной конфигурации и конфигурации личного транспортера; на основании сигнала из датчика, дают команду первому двигателю вращаться в первом направлении, когда рама находится в велосипедной конфигурации, и дают команду первому двигателю вращаться во втором направлении, противоположном первому направлению, когда рама находится в конфигурации личного транспортера.
Также предлагается транспортное устройство, содержащее: раму, складываемую между велосипедной конфигурацией и конфигурацией личного транспортера; датчик, выполненный с возможностью распознавать, когда рама находится в по меньшей мере одной из велосипедной конфигурации и конфигурации личного транспортера; первое колесо и второе колесо, каждое из которых с возможностью вращения присоединено к раме; первый двигатель, присоединенный к первому колесу, и второй двигатель, присоединенный ко второму колесу; и средство для вращения первого колеса в первом направлении, когда рама находится в велосипедной конфигурации, и вращения первого колеса во втором направлении, противоположном первому направлению, когда рама находится в конфигурации личного транспортера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
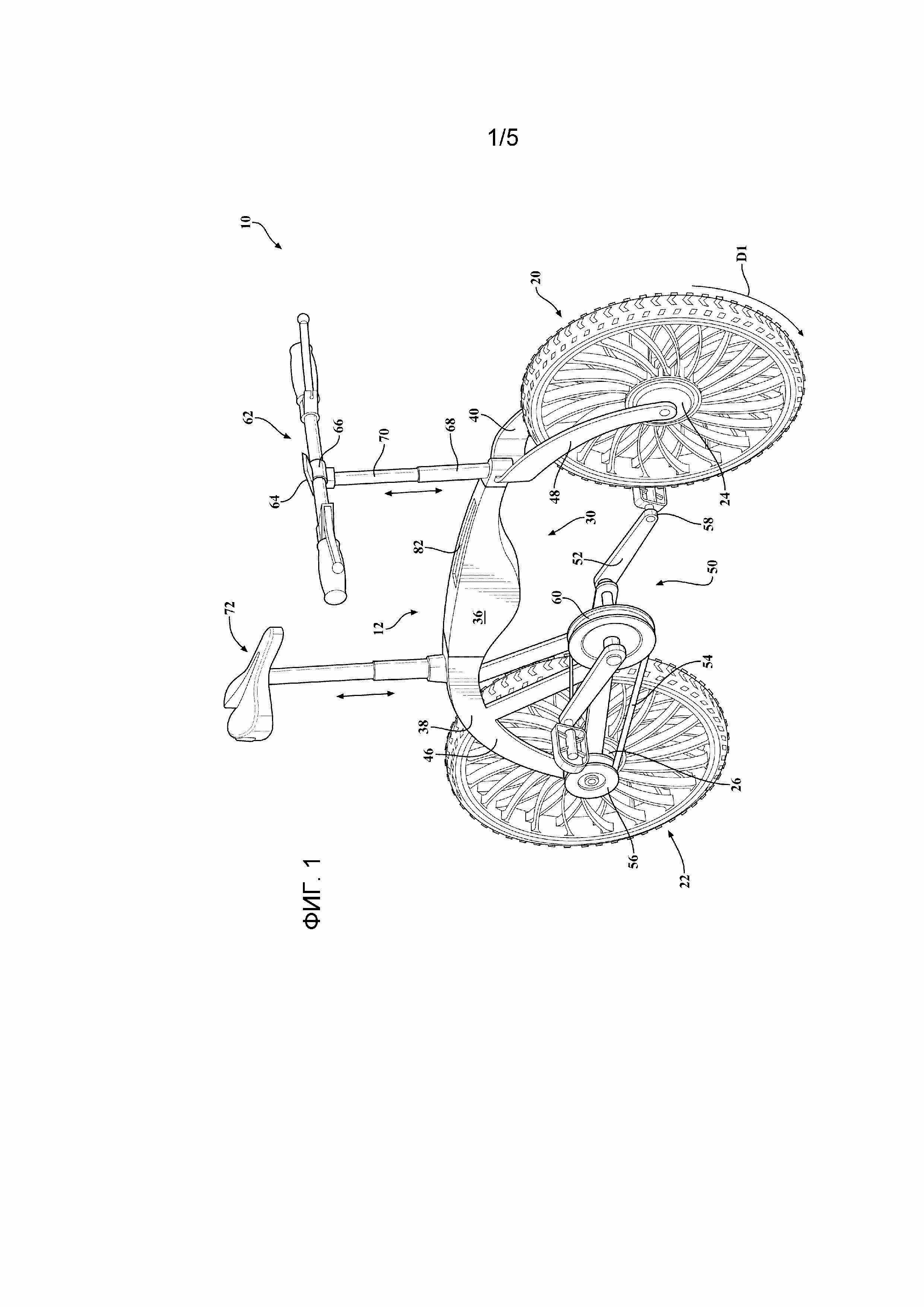
Фиг. 1 - вид в перспективе транспортного устройства в велосипедной конфигурации.
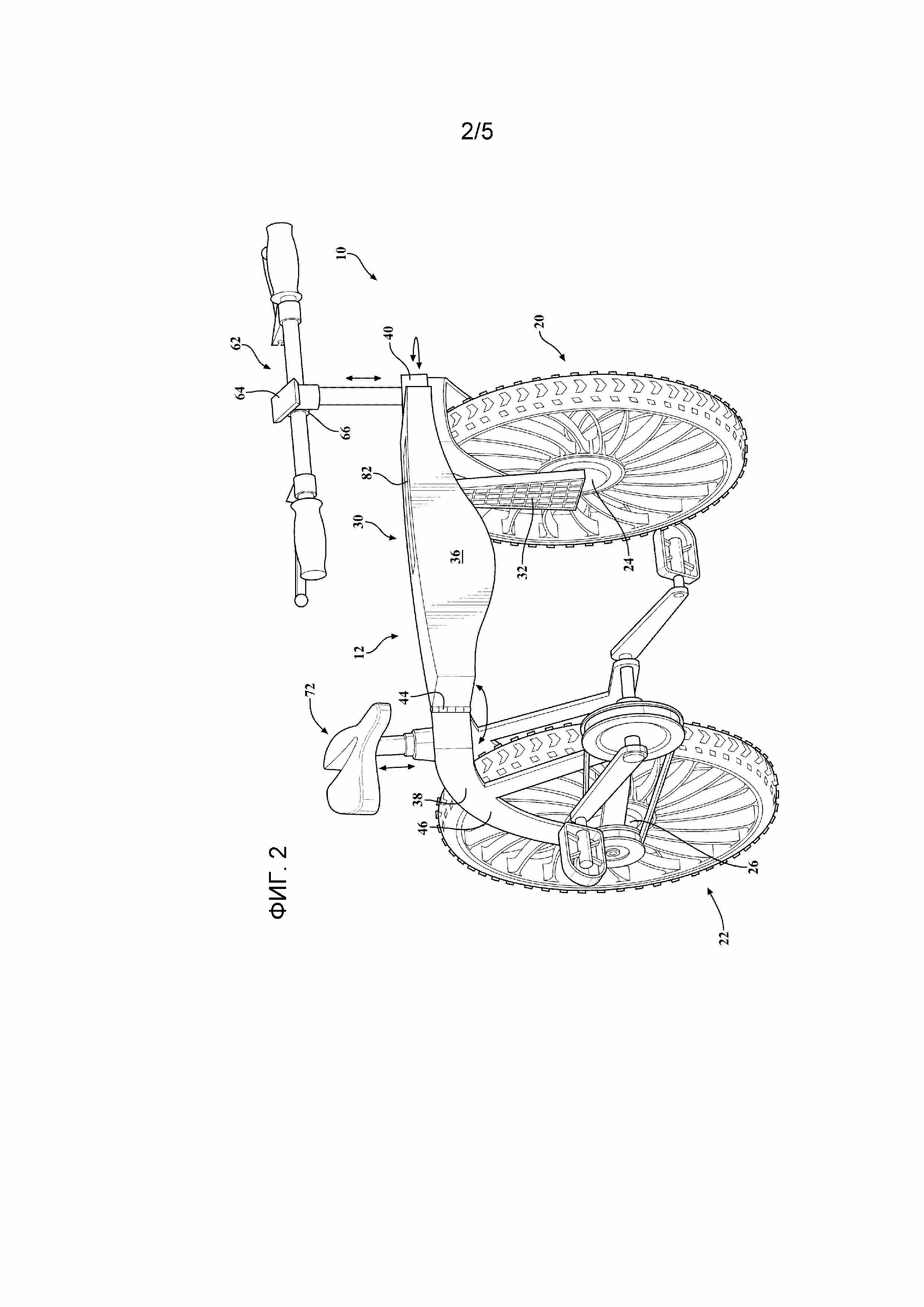
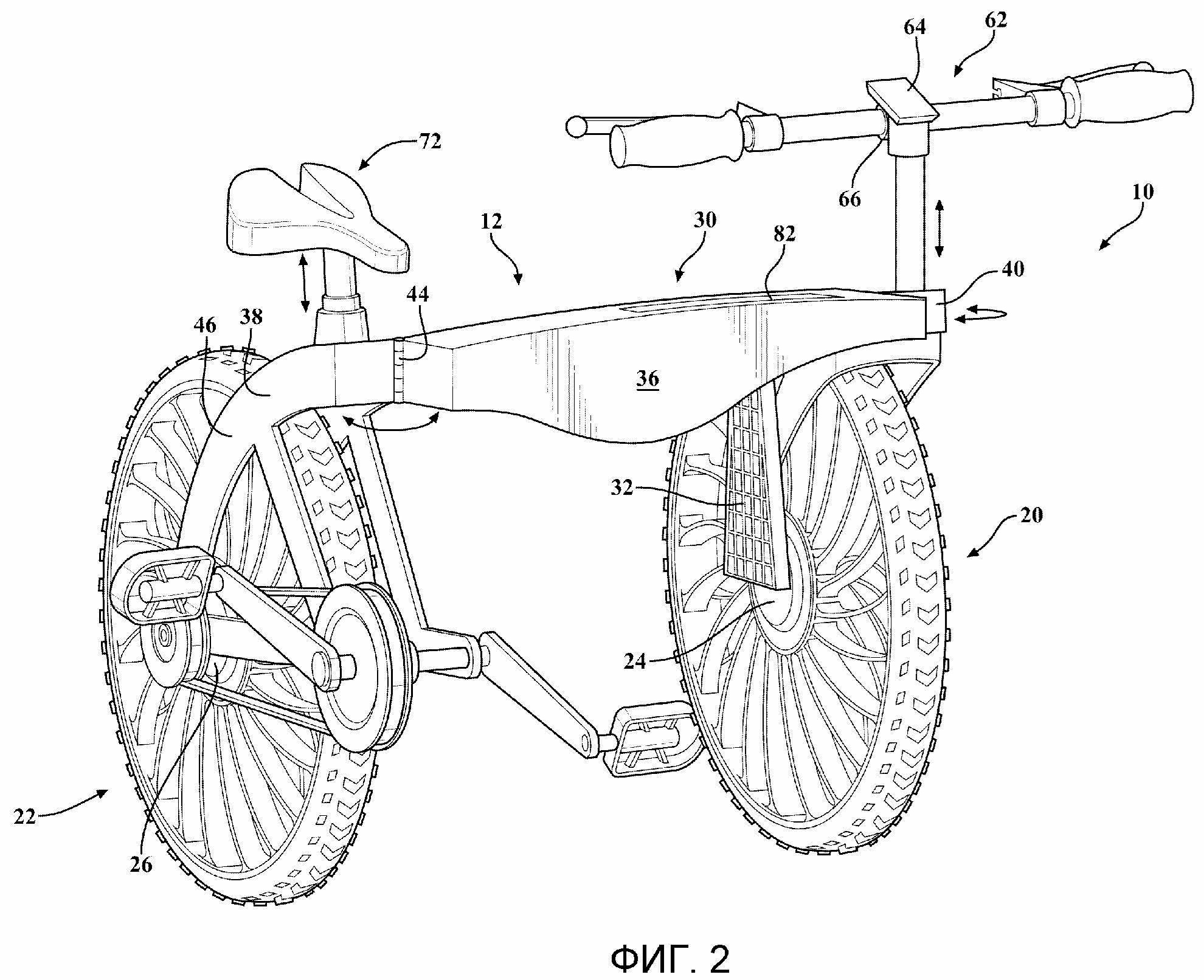
Фиг. 2 - вид в перспективе транспортного устройства, трансформируемого из велосипедной конфигурации в конфигурацию личного транспортера.
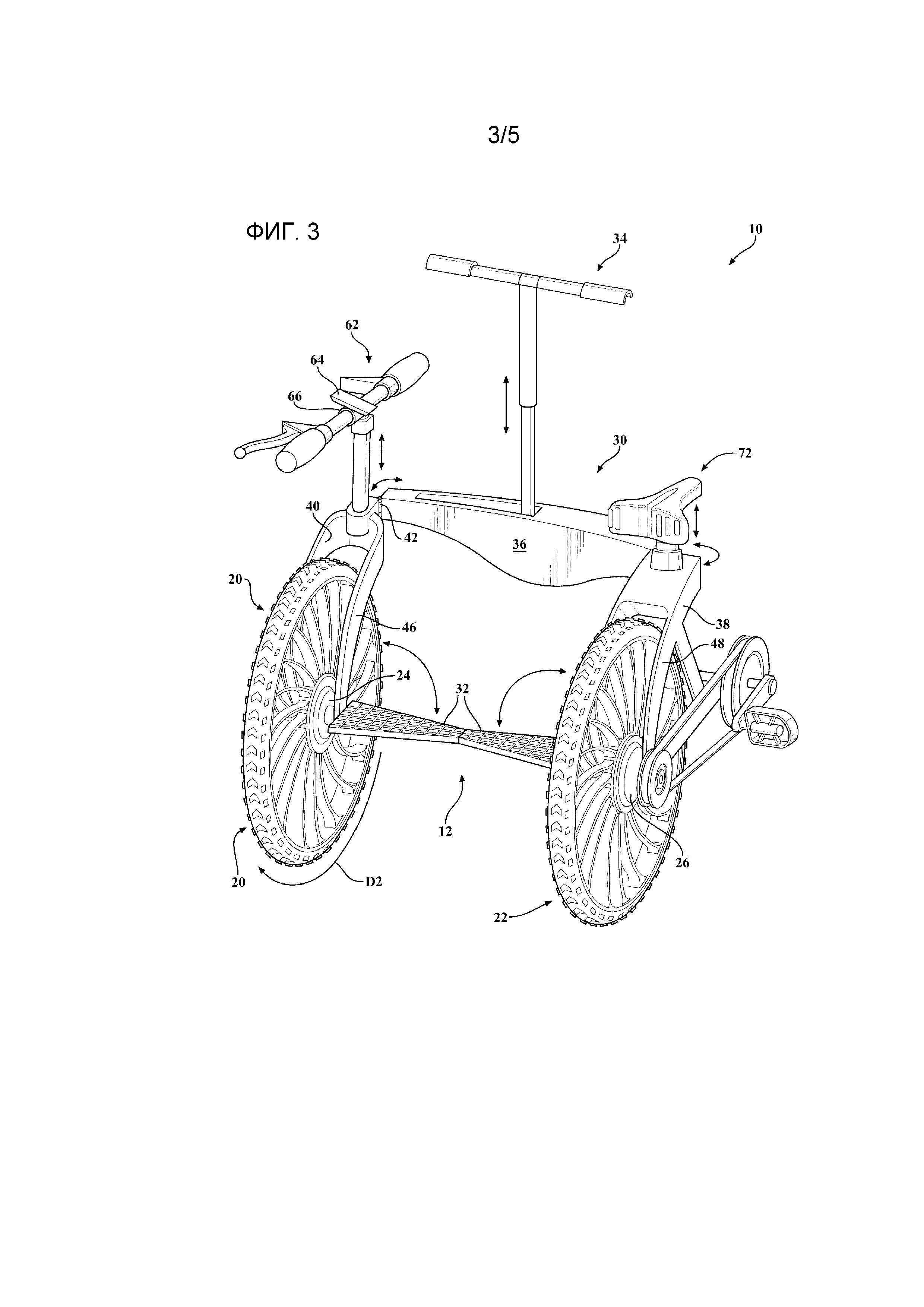
Фиг. 3 - вид в перспективе транспортного устройства в конфигурации личного транспортера.
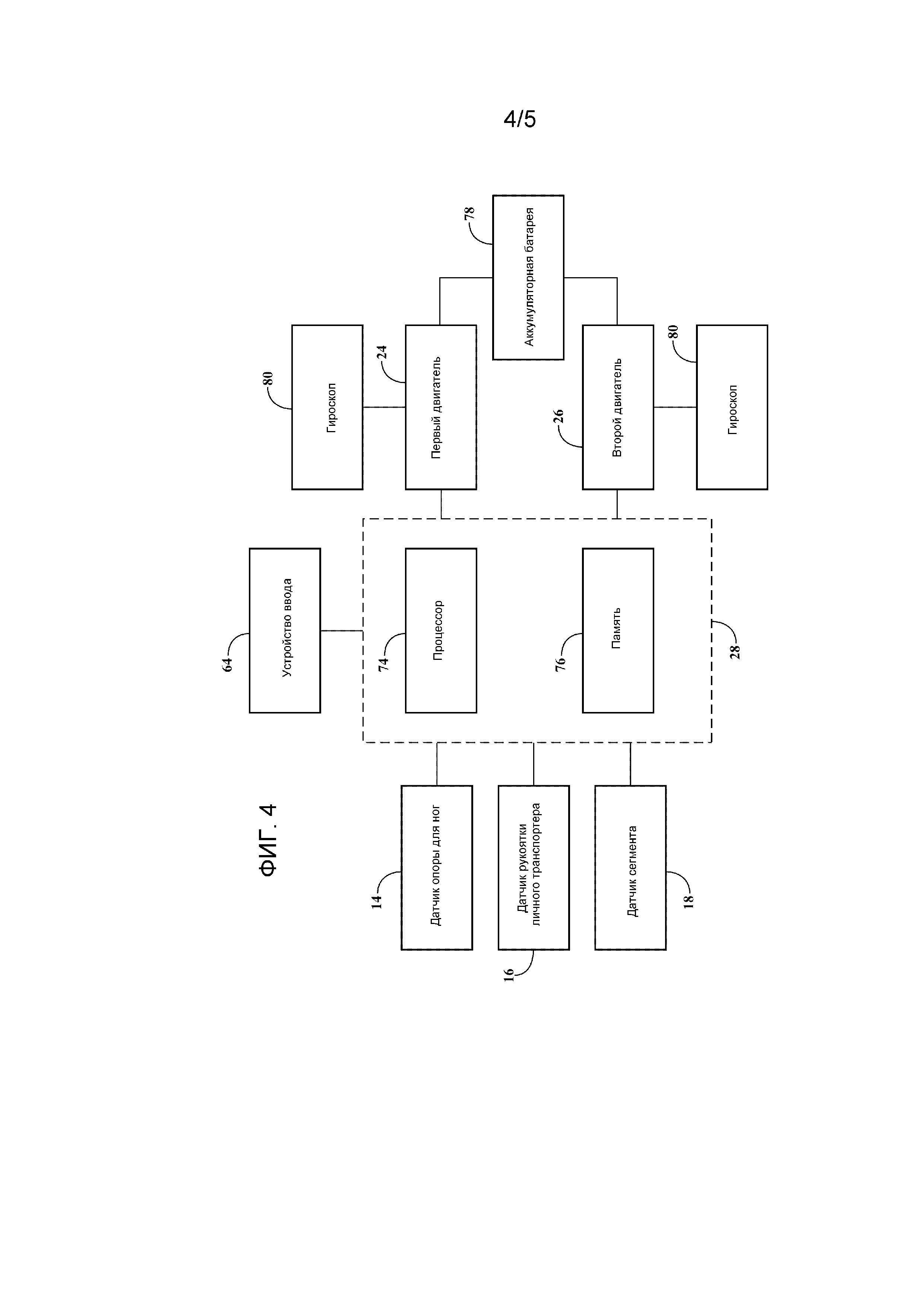
Фиг. 4 - схематический вид системы управления транспортного устройства.
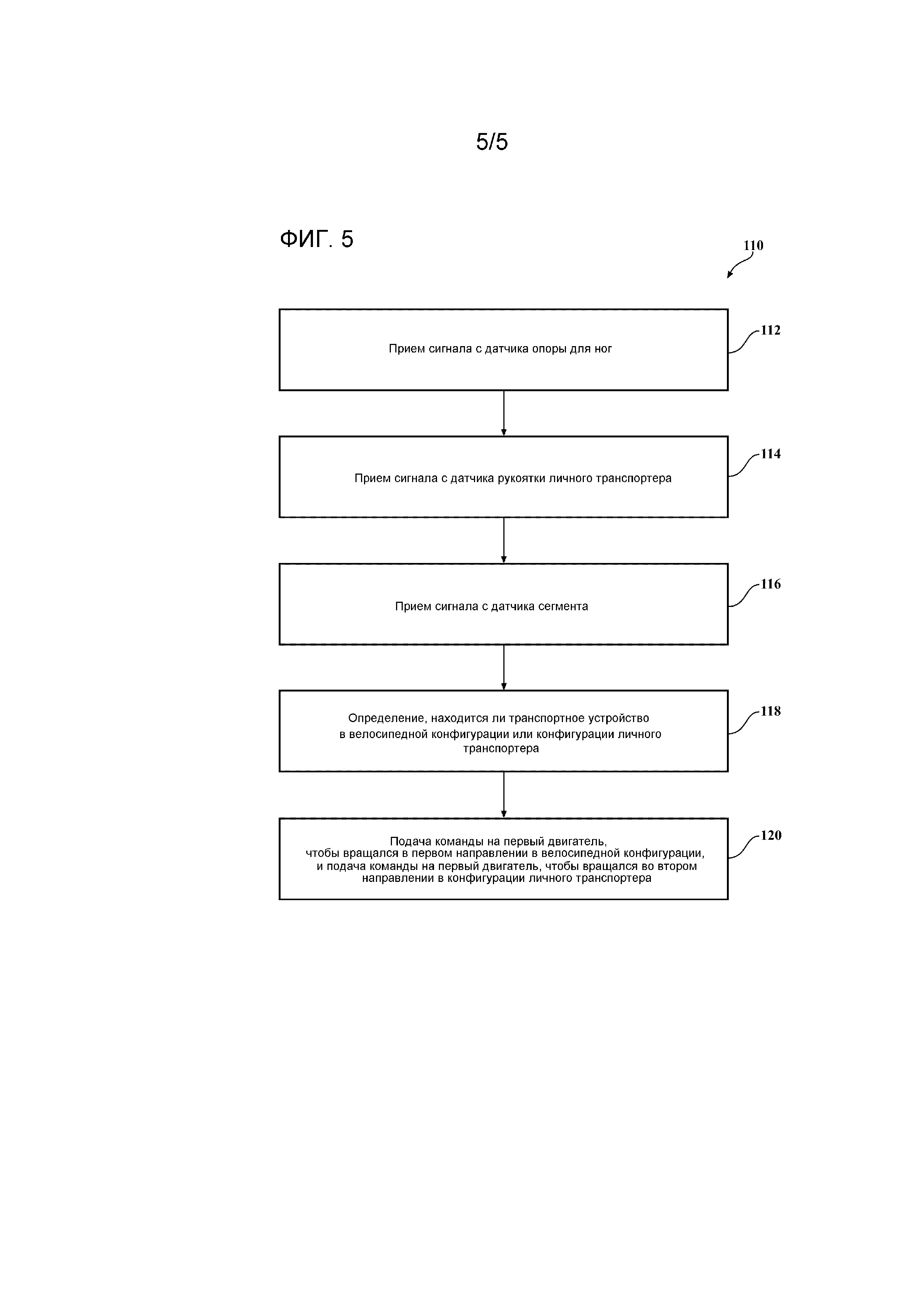
Фиг. 5 - блок-схема последовательности операций способа эксплуатации транспортного устройства.
ПОДРОБНОЕ ОПИСАНИЕ
Со ссылкой на фигуры, на которых одинаковые номера указывают идентичные части на всем протяжении нескольких видов, транспортное устройство 10 включает в себя раму 12, складываемую между велосипедной конфигурацией, как показано на фиг. 1, и конфигурацией личного транспортера, как показано на фиг. 3. Датчик 14, 16, 18, как показано на фиг. 4, выполнен с возможностью распознавать, когда рама 12 находится в по меньшей мере одной из велосипедной конфигурации и конфигурации личного транспортера. Как показано на фиг. 1-3, транспортное устройство 10 включает в себя первое колесо 20 и второе колесо 22, каждое из которых с возможностью вращения присоединено к раме 12. Первый двигатель 24 присоединен к первому колесу 20, а второй двигатель 26 присоединен ко второму колесу 22. Контроллер 28, как показано на фиг. 4, запрограммирован давать команду первому двигателю 24 вращаться в первом направлении D1 в ответ на сигнал из датчика 14, 16, 18, что рама 12 находится в велосипедной конфигурации, и давать команду первому двигателю 24 вращаться во втором направлении D2, противоположном первому направлению D1, в ответ на сигнал из датчика 14, 16, 18, что рама 12 находится в конфигурации личного транспортера.
Когда рама 12 находится в велосипедной конфигурации, как показано на фиг. 1, первый двигатель 24 и второй двигатель 26 могут вращать первое колесо 20 и второе колесо 22, соответственно, в общем направлении, чтобы приводить в движение транспортное устройство 10 вперед. В этой велосипедной конфигурации, контроллер 28 запрограммирован давать команду первому двигатель 24 вращаться в первом направлении D1, например, по часовой стрелке на фиг. 1. Однако, когда рама 12 переводится из велосипедной конфигурации в конфигурацию личного транспортера, как показано на фиг. 3, первый двигатель 24 и колесо могут поворачиваться приблизительно на 180 градусов. В этой конфигурации личного транспортера, контроллер 28 запрограммирован давать команду первому двигатель 24 вращаться во втором направлении D2, противоположном первому направлению D1, например, по часовой стрелке на фиг. 3.
Со ссылкой на фиг. 1-3, рама 12 включает в себя основной сегмент 30, по меньшей мере одну опору 32 для ног и рукоятку 34 личного транспортера. Основной сегмент 30 может включать в себя средний сегмент 36, задний сегмент 38, шарнирно соединенный со средним сегментом 36, и передний сегмент 40, шарнирно соединенный со средним сегментом 36, расположенный на определенном расстоянии от заднего сегмента 38. Каждый из среднего сегмента 36, заднего сегмента 38 и переднего сегмента 40 может быть сформирован из любого пригодного материала, например, металла, такого как сталь, алюминий, и т.д., композита, такого как углеродное волокно, и т.д.
Передний сегмент 40 и задний сегмент 38 подвижны относительно среднего сегмента 36 между велосипедной конфигурацией и конфигурацией личного транспортера. Например, как лучше всего показано на фиг. 2, шарнир 42 может соединять задний сегмент 38 и средний сегмент 36. Как лучше всего показано на фиг. 3, шарнир 44 может присоединять передний сегмент 40 к среднему сегменту 36. Шарниры 42, 44 могут иметь любой пригодный тип. Шарниры 42, 44 могут разъемным образом блокировать передний сегмент 40 и задний сегмент 38 относительно среднего сегмента 36 в велосипедной конфигурации и/или в конфигурации личного транспортера. В качестве альтернативы, в дополнение, передний сегмент 40, задний сегмент 38 и/или средний сегмент 36 могут включать в себя другой фиксатор (не показан), который разъемным образом блокирует задний сегмент 38 относительно среднего сегмента 36 в велосипедной конфигурации и/или в конфигурации личного транспортера.
Передний сегмент 40 может поддерживать первое колесо 20. Например, передний сегмент 40 может включать в себя вилку 46, которая зацепляется с первым колесом 20. Подобным образом, задний сегмент 38 может поддерживать второе колесо 22. Например, задний сегмент 38 может включать в себя вилку 48, которая зацепляется со вторым колесом 22.
Задний сегмент 38 может поддерживать цепь 50 ножного привода. Например, цепь 50 ножного привода может включать в себя кривошип 52, ремень 54 и шестерню 56 на втором колесе 22. Более точно, кривошип 52 может включать в себя две педали 58 и шестерню 60, которая зацепляется с ремнем 54. Ремень 54 продолжается между шестерней 60 на кривошипе 52 и шестерней 56 на втором колесе 22, чтобы передавать вращение с кривошипа 52 на второе колесо 22, когда водитель транспортного устройства 10 вручную нажимает педали кривошипа 52, когда транспортное устройство 10 находится в велосипедной конфигурации, как показано на фиг. 1. Ремень 54 может быть сформирован из эластомера или ткани. В альтернативу ремню 54, цепь 50 ножного привода может включать в себя цепь, например, сформированную из металла, пластмассы, и т.д.
Рама 12 может включать в себя руль 62 велосипеда. Руль 62 велосипеда может поддерживаться на переднем сегменте 40 рамы 12. Руль 62 велосипеда может быть присоединен к вилке 46 переднего сегмента 40 и может передавать поворачивание на вилку 46, то есть, когда водитель управляет направлением движения транспортного устройства 10, когда в велосипедной конфигурации.
Руль 62 велосипеда может включать в себя элементы управления для транспортного устройства 10, чтобы управлять транспортным устройством 10, когда в велосипедной конфигурации. Например, руль 62 велосипеда может включать в себя тормозные рычаги (не пронумерованы), устройство 64 ввода, и т.д. Устройство 62 ввода может быть мобильным устройством, которое может быть съемным образом пристыковано к рулю 62 велосипеда. Устройство 64 ввода, например, может быть мобильным телефоном, планшетом, и т.д. Руль 62 велосипеда может включать в себя стыковочный узел 66 на связи с контроллером 28, чтобы передавать сигналы между устройством 64 ввода и контроллером 28, например, чтобы управлять одной или более операций транспортного устройства 10 и/или отображать информацию с транспортного устройства 10 на устройстве 64 ввода.
Руль 62 велосипеда может быть выдвижным относительно основного сегмента 30 в велосипедную конфигурацию, как показано на фиг. 1, и убираемым относительно основного сегмента 30 в конфигурацию личного транспортера, как показано на фиг. 2. Например, руль 62 велосипеда может включать в себя базовую стойку 68, прикрепленную к вилке 46 переднего сегмента 40 рамы 12, и подвижную стойку 70, которая является убираемой в и выдвижной из базовой стойки 68. Подвижная стойка 70 и/или базовая стойка 68 могут включать в себя фиксатор (не показан) для блокирования подвижной стойки 70 в убранном положении и/или выдвинутом положении.
Рама 12 включает в себя по меньшей мере одну опору 32 для ног, например, две опоры 32 для ног, как показано на фигурах. Каждая из опор 32 для ног может быть независимо выдвижной относительно основного сегмента 30 в конфигурацию личного транспортера, как показано на фиг. 3, и убираемой относительно основного сегмента 30 в велосипедную конфигурацию, как показано на фиг. 1.
Как лучше всего показано на фиг. 3, например, рама 12 может включать в себя одну опору 32 для ног, поддерживаемую на переднем сегменте 40, например, вилке 46, и одну опору 32 для ног, поддерживаемую на заднем сегменте 38, например, вилке 48. Опоры 32 для ног выполнены с возможностью поддерживать водителя транспортного устройства 10, когда в конфигурации личного транспортера, то есть, наделены размерами, формой и сформированы из материала, пригодного для выдерживания веса водителя, в то время как водитель стоит на опорах 32 для ног. Опоры 32 для ног могут быть сформированы из любого пригодного материала, например, металла, композита, пластмассы, и т.д. Опоры 32 для ног могут зацепляться друг с другом, то есть, взаимоблокироваться, как лучше всего показано на фиг. 3, когда опоры 32 для ног выдвинуты относительно основного сегмента 30.
Рукоятка 34 личного транспортера является выдвижной относительно основного сегмента 30 в конфигурацию личного транспортера, как показано на фиг. 3, и убираемой относительно основного сегмента 30 в велосипедную конфигурацию, как показано на фиг. 1. Например, рукоятка 34 личного транспортера может быть выдвижной из и убираемой в среднюю часть рамы 12. Средняя часть, например, может определять полость 82 для приема рукоятки 34 личного транспортера в убранном положении. Рукоятка 34 личного транспортера может включать в себя шарнирно соединенные сегменты и телескопические компоненты, чтобы умещаться в полости 82 в убранном положении, то есть, в велосипедной конфигурации.
Транспортное устройство 10 может включать в себя седло 72, которое является выдвижным из и убираемым в один из основного сегмента 30 рамы 12. Например, седло 72 может быть выдвижным из заднего сегмента 38 в велосипедной конфигурации, как показано на фиг. 1, и может быть убираемым в задний сегмент 38 в конфигурации личного транспортера.
Транспортное устройство 10 может включать в себя один или более датчиков 14, 16, 18 для распознавания, когда компоненты транспортного устройства 10 находятся в велосипедной конфигурации, как показано на фиг. 1, и/или конфигурации личного транспортера, как показано на фиг. 3. Например, как показано на фиг. 4, транспортное устройство 10 может включать в себя датчик, то есть, датчик 14 опоры для ног, выполненный с возможностью распознавать положение опоры 32 для ног относительно основного сегмента 30, датчик, то есть, датчик 16 рукоятки личного транспортера, выполненный с возможностью распознавать положение рукоятки 34 личного транспортера относительно основного сегмента 30, и/или датчик, то есть, датчик 18 сегмента, выполненный с возможностью распознавать положение по меньшей мере одного из переднего сегмента 40 и заднего сегмента 38 относительно среднего сегмента 36. Транспортное устройство 10 также может включать в себя другие датчики для распознавания, когда другие компоненты транспортного устройства 10 находятся в велосипедной конфигурации и/или в конфигурации личного транспортера. Например, транспортное устройство 10 может включать в себя датчик седла (не показан), выполненный с возможностью распознавать, когда седло 72 выдвинуто из и/или убрано в основной сегмент 30 рамы 12.
Датчик 14 опоры для ног, датчик 16 рукоятки личного транспортера и датчик 18 сегмента могут быть любого пригодного типа и могут быть одинакового типа или разных типов по сравнению друг с другом. В качестве одного из примеров, датчик 14 опоры для ног, датчик 16 рукоятки личного транспортера и/или датчик 18 сегмента могут быть бесконтактными датчиками, например, емкостными, на эффекте Холла, оптическими, и т.д. В качестве еще одного примера, датчик 14 опоры для ног, датчик 16 рукоятки личного транспортера и/или датчик 18 сегмента могут быть механическими переключателями.
Датчик 14 опоры для ног, датчик 16 рукоятки личного транспортера и датчик 18 сегмента могут находиться на связи с контроллером 28 любым пригодным образом. Например, датчик 14 опоры для ног, датчик 16 рукоятки личного транспортера и/или датчик 18 сегмента могут быть присоединены проводами непосредственно или опосредованно к контроллеру 28. В качестве еще одного примера, датчик 14 опоры для ног, датчик 16 рукоятки личного транспортера и/или датчик 18 сегмента могут поддерживать связь с контроллером 28 беспроводным образом.
Транспортное устройство 10 включает в себя средство для вращения первого колеса 20 в первом направлении D1, когда рама 12 находится в велосипедной конфигурации, и вращения первого колеса 20 во втором направлении D2, противоположном первому направлению D1, когда рама 12 находится в конфигурации личного транспортера. Более точно, как изложено выше, средством может быть контроллер 28, как изложено выше, и его конструктивные эквиваленты.
Контроллер 28, например, может быть вычислительным устройством, запрограммированным выдавать команду на первое колесо 20, чтобы вращалось в первом направлении D1, в ответ на сигнал с датчика 14 опоры для ног, датчика 16 рукоятки личного транспортера и/или датчика 18 сегмента, что рама 12 находится в велосипедной конфигурации, и выдавать команду на первое колесо 20, чтобы вращалось во втором направлении D2, в ответ на сигнал с датчика 14 опоры для ног, датчика 16 рукоятки личного транспортера и/или датчика 18 сегмента, что рама 12 находится в конфигурации личного транспортера. Вычислительное устройство может включать в себя любые пригодные компоненты. Например, вычислительное устройство может включать в себя процессор 74, память 76, и т.д. Память 76 может хранить команды, содержащие программы, чтобы выдавать команду на первое колесо 20, чтобы вращалось в первом направлении D1, в ответ на сигнал с датчика 14 опоры для ног, датчика 16 рукоятки личного транспортера и/или датчика 18 сегмента, что рама 12 находится в велосипедной конфигурации, и выдавать команду на первое колесо 20, чтобы вращалось во втором направлении D2, в ответ на сигнал с датчика 14 опоры для ног, датчика 16 рукоятки личного транспортера и/или датчика 18 сегмента, что рама 12 находится в конфигурации личного транспортера.
Вычислительные устройства, такие как обсужденные в материалах настоящей заявки, каждое, как правило, включает в себя команды, исполняемые одним или более вычислительных устройств, таких как идентифицированные выше, и для выполнения вершин блок-схем или этапов последовательностей операций, описанных выше. Например, вершины блок-схем последовательностей операций, обсужденные выше, могут быть воплощены в качестве машинно-исполняемых команд.
Машинно-исполняемые команды могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML, и т.д. Вообще, процессор 74 (например, микропроцессор) принимает команды, например, из памяти 76, машинно-читаемого носителя, и т.д., и исполняет эти команды, тем самым, выполняя одну или более последовательностей операций, в том числе, одну или более из последовательностей операций, описанных в материалах настоящей заявки. Такие команды и другие данные могут храниться и передаваться с использованием многообразия машинно-читаемых носителей. Файл в вычислительном устройстве, как правило является совокупностью данных, хранимых на машинно-читаемом носителе, таком как запоминающий носитель, оперативное запоминающее устройство, и т.д.
Машинно-читаемый носитель включает в себя любой носитель, который принимает участие в предоставлении данных (например, команд), которые могут читаться компьютером. Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители, энергозависимые носители, и т.д. Энергонезависимые носители, например, включают в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы машинно-читаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM (постоянное запоминающее устройство (ПЗУ) на компакт-диске), DVD (цифровой многофункциональный диск), любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, ОЗУ (оперативное запоминающее устройство, RAM), ППЗУ (программируемое ПЗУ, PROM), СППЗУ (стираемое программируемое ПЗУ, EPROM), флэш-память/ЭСППЗУ (FLASH-EEPROM (электрически стираемое программируемое ПЗУ)), любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
Первый двигатель 24 и второй двигатель 26 могут иметь любой пригодный тип и могут иметь одинаковый тип или разный тип по сравнению друг с другом. В качестве одного из примеров, первый двигатель 24 и второй двигатель 26 могут быть электродвигателями. В такой конфигурации, как показано на фиг. 4, транспортное устройство 10 может включать в себя аккумуляторную батарею 78 на связи с первым двигателем 24 и вторым двигателем 26.
Второй двигатель 26 вращается в общем направлении как в велосипедной конфигурации, так и в конфигурации личного транспортера. Другими словами, в отличие от первого двигателя 24, рама 12 не поворачивает первый двигатель 24 между велосипедной конфигурацией и конфигурацией личного транспортера.
Транспортное устройство 10 может включать в себя по меньшей мере один гироскоп 80 на связи как с первым двигателем 24, так и со вторым двигателем 26. Например, как показано на фиг. 4, транспортное устройство 10 может включать в себя один гироскоп 80 на связи с первым двигателем 24 и один гироскоп 80 на связи со вторым двигателем 26. Когда транспортное устройство 10 находится в конфигурации личного транспортера,
Контроллер 28 также может управлять работой первого двигателя 24 и второго двигателя 26. Например, когда транспортное устройство 10 находится в велосипедной конфигурации, контроллер 28 может быть запрограммирован выдавать команды первому двигателю 24 и/или второму двигателю 26 для управления частотой вращения первого двигателя 24 и/или второго двигателя 26. Например, транспортное устройство 10 в велосипедной конфигурации может эксплуатироваться в механизированном режиме, например, полностью механизированном PEDELEC, и т.д., где первый двигатель 24 и/или второй двигатель 26 приводят в движение транспортное устройство 10. Водитель может управлять частотой вращения первого двигателя 24 и/или второго двигателя 26 через устройство 64 ввода, элементы управления на руле 62 велосипеда, и т.д.
В качестве еще одного примера, когда транспортное устройство 10 находится в конфигурации личного транспортера, контроллер 28 может быть запрограммирован выдавать команды на первый двигатель 24 и/или второй двигатель 26 для управления частотой вращения первого двигателя и/или второго двигателя 26, чтобы управлять частотой вращения первого двигателя 24 и/или второго двигателя 26 в ответ на сигналы из гироскопов 80. Контроллер 28, например, может выдавать команды на первый двигатель 24 и/или второй двигатель 26 на основании сигналов из гироскопов 80, чтобы сохранять равновесие транспортного устройства 10. Другими словами, транспортное устройство 10 в конфигурации личного транспортера может быть самоуравновешивающимся.
В использовании, транспортное средство 10 может переводиться в велосипедный режим, как показано на фиг. 1, посредством раскладывания переднего сегмента 40 и заднего сегмента 38 рамы 12 от среднего сегмента 36 рамы 12, убирания опор 32 для ног, убирания рукоятки 34 личного транспортера в полость 82 и выдвигания руля 62 велосипеда. В этой конфигурации, по меньшей мере один из датчика 14 опоры для ног, датчика 16 рукоятки личного транспортера и датчиков 18 сегмента выдает сигнал в контроллер 28, что транспортное устройство 10 находится в велосипедной конфигурации. Когда контроллер 28 принимает сигналы, что транспортное устройство 10 находится в велосипедной конфигурации, контроллер 28 функционирует в режиме велосипеда. Например, в режиме велосипеда, контроллер 28 выдает команду на первый двигатель 24, чтобы вращался в первом направлении D1.
Транспортное устройство 10 может переводиться в конфигурацию личного транспортера, как показано на фиг. 1, посредством складывания переднего сегмента 40 и заднего сегмента 38 относительно среднего сегмента 36, выдвигания опор 32 для ног, выдвигания рукоятки 34 личного транспортера из полости 82 и убирания руля 62 велосипеда. В этой конфигурации, по меньшей мере один из датчика 14 опоры для ног, датчика 16 рукоятки личного транспортера и датчиков 18 сегмента выдает сигнал в контроллер 28, что транспортное устройство 10 находится в конфигурации личного транспортера. Когда контроллер 28 принимает сигналы, что транспортное устройство 10 находится в конфигурации личного транспортера, контроллер 28 функционирует в режиме личного транспортера. Например, в режиме личного транспортера, контроллер 28 выдает команду на первый двигатель 24, чтобы вращался во втором направлении D2.
Способ для управления транспортным устройство 10 показан на фиг. 5. Как показано на вершинах 112-116 блок-схемы, способ включает в себя прием сигнала с датчика, указывающего, что рама 12 находится в одной из велосипедной конфигурации и конфигурации личного транспортера. Более точно, как показано на вершине 112 блок-схемы, способ включает в себя прием сигнала с датчика 14 опоры для ног, указывающего, что опора 32 для ног является одной из выдвинутой относительно рамы 12 и убранной относительно рамы 12, то есть, указывающего, что опора 32 для ног выдвинута или убрана относительно рамы 12. Более точно, контроллер 28 принимает сигнал с датчика 14 опоры для ног, как изложено выше.
Как показано на вершине 114 блок-схемы по фиг. 5, способ включает в себя прием сигнала с датчика 16 рукоятки личного транспортера, указывающего, что рукоятка 34 личного транспортера находится в одной из выдвинутой из полости 82 в среднем сегменте 36 рамы 12 или убранной в полость 82 в среднем сегменте 36 рамы 12, то есть, указывающего, что рукоятка 34 личного транспортера выдвинута или убрана. Более точно, контроллер 28 принимает сигнал из датчика 16 рукоятки личного транспортера.
Как показано на вершине 116 блок-схемы по фиг. 5, способ включает в себя прием сигнала из датчика 18 сегмента, указывающего, что передний сегмент 40 и/или задний сегмент 38 являются одним из сложенного и разложенного относительно среднего сегмента 36, то есть, указывающего, что передний сегмент 40 и/или задний сегмент 38 сложен или разложен. Более точно, контроллер 28 принимает сигнал из датчика 18 сегмента.
Как показано на вершине 118 блок-схемы по фиг. 5, на основании сигнала из датчика 14 опоры для ног, датчика рукоятки личного транспортера и/или датчика 18 сегмента, способ включает в себя определение, находится ли транспортное устройство 10 в велосипедной конфигурации или в конфигурации личного транспортера. Более точно, контроллер 28 определяет, находится ли транспортное устройство 10 в велосипедной конфигурации или в конфигурации личного транспортера.
Как показано на вершине 120 блок-схемы по фиг. 5, на основании сигнала из датчика 14 опоры для ног, датчика рукоятки личного транспортера и/или датчика 18 сегмента, способ включает в себя выдачу команды первому двигателю 24, чтобы вращался в первом направлении D1, когда рама 12 находится в велосипедной конфигурации, и выдачу команды первому двигателю 24, чтобы вращался во втором направлении D2, противоположном первому направлению D1, когда рама 12 находится в конфигурации личного транспортера, как изложено выше. Более точно, контроллер 28 дает команду первому двигателю 24. Контроллер 28 может повторно принимать сигналы с датчика 14 опоры для ног, датчика рукоятки личного транспортера и/или датчика 18 сегмента.
Это изобретение было описано иллюстративным образом, и должно быть понятно, что терминология, которая была использована, подразумевается свойственной по характеру формулировок скорее описанию, нежели ограничению. Многие модификации и варианты настоящего изобретения возможны в свете вышеприведенных доктрин, и изобретение может быть осуществлено на практике иначе, чем как конкретно описано.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)

