Результат интеллектуальной деятельности: Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки
Вид РИД
Изобретение
Настоящее изобретение относится к рельсовому транспорту, к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением локомотивов при маневровой работе на станции, а именно при автоматизации управления маневровым локомотивом при надвиге и роспуске составов на сортировочной горке.
Неотъемлемой частью перевозочного процесса на железнодорожном транспорте является технологическая работа, связанная с переработкой грузовых составов на специальных станциях, называемых сортировочными. На сортировочной горке производится расформирование и формирование составов поездов.
Сортировочная горка в сортировочных станциях или сортировочных парках станций - вид железнодорожного сортировочного устройства для ускорения расформирования составов из грузовых вагонов, использующий для перемещения вагонов земное тяготение, то есть скатывание вагонов и групп вагонов с уклона. Сортировочные горки являются одними из наиболее высокопроизводительных сортировочных устройств в железнодорожном транспорте.
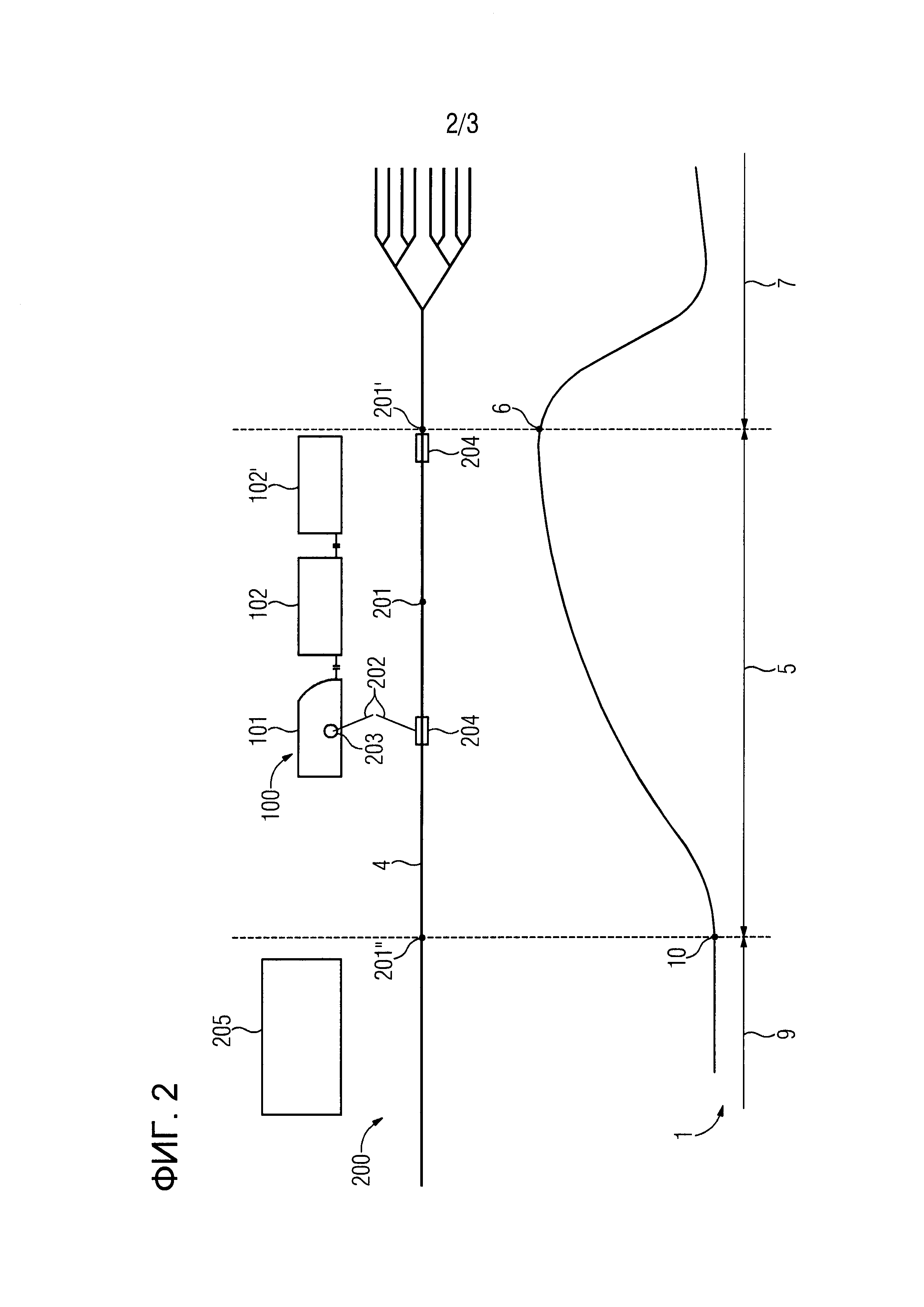
Существует несколько различных видов сортировочных горок, различающихся профилем и технологией работы. Ниже описан наиболее распространенный вариант. На ФИГ. 1 представлена схема сортировочной горки 1, а именно профиль 2 сортировочной горки 1, а так же схематично показано размещение 3 железнодорожных путей 4.
Сортировочная горка 1 имеет надвижную часть 5, горб горки 6, спускную часть 7, по которым проложены железнодорожные пути 4 для осуществления движения подвижного состава.
Сортировочная горка 1 состоит из как минимум из одного железнодорожного пути надвига 4, которые разветвляются начиная со стрелочной горловины 8, находящейся на спускной части 7 сортировочной горки 1. Часть железнодорожных путей на спускной части 7 сортировочной горки 1 начиная со стрелочной горловины 8 называется подгорочным или сортировочным парком. Подгорочный или сортировочный парк сортировочной горки 1 может иметь более 30 путей.
Так же, как правило, имеются обходные пути (не показаны на ФИГ 1) от одного или нескольких крайних путей подгорочного или сортировочного парка к пути надвига 4 в обход горба горки 6 к парку приема 9 вагонов, подлежащих дальнейшей сортировке.
Большая часть пути надвига 4 на надвижной части 5 сортировочной горки 1 в зависимости от ситуации располагается на горизонтальной площадке или небольшом уклоне в сторону надвига (для облегчения надвига). Далее профиль постепенно переходит в нарастающий подъем на горб горки 6, в пределах этого подъема расположена зона расцепки автосцепок. Здесь подвижной состав сжат, что делает возможным расцепку - т.е. разделение подвижного состава на отдельные отцепы (вагон или группы сцепленных вагонов). Далее располагается горб горки 6, где подъем переходит в крутой спуск на спускной части 7 сортировочной горки 1.
Принцип работы сортировочной горки 1 заключается в следующем: на этапе надвига подлежащие дальнейшей сортировке отцепы, сформированные в парке приема 9, по пути надвига 4 на надвижной части 5 сортировочной горки 1 постепенно и непрерывно надвигаются локомотивом на горб горки 6. Далее на этапе роспуска, отцепы, которые перевалили за горб горки 6, скатываются по крутому спуску по спускной части 7 сортировочной горки 1 под действием силы тяжести, где путем регулирования их скорости движения, а так же путем автоматизированного и/или механизированного перевода стрелок направляются на нужный путь подгорочного или сортировочного парка.
Скорость роспуска подвижного состава ограничивается временем освобождения предыдущим отцепом маршрута для следующего. При этом задача локомотива состоит в том, что бы столкнуть все отцепы с горба горки 6, т.е. распустить весь подвижной состав, а самому остаться на надвижной части 5 сортировочной горки, т.е. не перевалить через горб горки 6.
В настоящий момент управление маневровыми локомотивами на сортировочных горках при роспуске, надвиге и маневровом режиме осуществляется машинистами вручную. Качество работы машиниста точность поддержания скорости состава при надвиге и роспуске, скорость реакции на нештатные ситуации и другие - зависят от опыта машиниста и его психоэмоционального состояния. Однако труд машиниста очень монотонный, т.к. обычно скорость движения локомотива 5-10 км в час.
Известен способ управления движением локомотивов при маневровой работе описанный в RU 2567099, который использует сигналы GPS/GLONASS, статусы блоков-участков, состояния сигналов от взаимосвязанной системы, чтобы оценить и управлять позицией локомотива и поезда на железнодорожном пути. Для определения скорости поезда данный способ использует скоростные ограничений определенные для каждого блока-участка и состояния сигналов. Такой подход применим для маневровых передвижений, но недостаточен для сближения и сортировки поездов. Кроме того, метод полагается на систему позиционирования GPS/GLONASS для фиксации позиции локомотива на железнодорожных путях и для измерения скорости. В случае когда радио сигнал GPS/GLONASS потерян, система прекращают работать. Так же данный метод использует блоки-участки для оценки длины поезда и для определения местонахождения последнего вагона, что не подходит для автоматических гравитационных сортировочных горок, которые используют колесные датчики. Размещение границ блоков-участков основано на соображениях безопасности, но недостаточно для осуществления контроля скорости поезда перед горбом сортировочной горки во время надвига подвижного состава.
Однако система ГЛОНАСС даже в комбинации с информацией о занятости блок-участков (изолированных участков) не позволяет точно определить местоположение локомотива и состава, так как блок-участок имеет протяженность.
В дополнение к этому при нахождении на путях значительного количества вагонов и других локомотивов сигнал ГЛОНАСС может быть потерян. Принимая во внимание что расстояние между путями меньше погрешности с которой ГЛОНАСС определяет местонахождение, точное местонахождение локомотива становится трудно определить и могут возникать ошибки в определении местонахождения локомотива и состава. Данные ошибки можно исправить программным путем при движении локомотива на большие расстояния. Однако при движении локомотива в процессе надвига, которое осуществляется с маленькой скоростью, такие ошибки в определении местоположения локомотива и вагонов недопустимы так как могут привести к аварийным ситуациям.
Так же при надвиге скорость движения локомотива маленькая меньше 10 км в час, в связи с чем точность определения движения локомотива только при использовании датчика ГЛОНАСС очень небольшая / недостаточная для обеспечения безаварийной безопасной работы / движения.
Процесс надвига и роспуска подвижного состава в данном способе не автоматизирован.
Задачей предлагаемого изобретения является создание автоматической системы управления подвижным составом на сортировочных горках, в том числе на сортировочных горках колеи 1520, при осуществлении надвига и роспуска подвижного состава.
Технический результат, достигаемый при реализации предлагаемого изобретения, заключается в возможности автоматического управления локомотивами при надвиге и роспуске подвижных составов на сортировочной горке, достижении минимального времени роспуска подвижного состава.
В соответствии с вышеизложенным, основными объектами настоящего изобретения являются способ управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки как он определен в пункте 1 формулы настоящего изобретения, и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки как она определена в пункте 9 формулы настоящего изобретения.
В соответствии с настоящим изобретением описывается способ управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки.
При этом сортировочная горка имеет надвижную часть, горб горки, и спускную часть, по которым проложены железнодорожные пути для осуществления движения подвижного состава. Подвижной состав состоит из по крайней мере одного отцепа и по крайней мере одного локомотива. При этом отцеп состоит из вагона или группы сцепленных между собой вагонов отделяемых от подвижного состава и/или локомотива, в случае если в подвижном составе только один отцеп, в процессе его роспуска /расформирования.
Подвижной состав и железнодорожные пути сортировочной горки оснащены системой идентификационных меток и считывателей, позволяющей определять местоположение подвижного состава на железнодорожных путях сортировочной горки. Такая система идентификационных меток и считывателей состоит из по крайней мере одной идентификационной метки и по крайней мере одного считывателя сигналов идентификационных меток, при этом каждая идентификационная метка и каждый считыватель сигналов идентификационных меток имеет свой уникальный идентификационный номер.
В дополнение к системе идентификационных меток и считывателей, железнодорожные пути оснащены по крайней мере одним колесным датчиком, который позволяет фиксировать прохождение подвижного состава и определять количество отцепов прошедших в точке установки колесного датчика.
Способ управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки заключается в том, что в режиме надвига подвижного состава подвижной состав движется по надвижной части сортировочной горки в направлении горба горки, при этом движение подвижного состава осуществляется по крайней мере одним локомотивом, который надвигает по крайней мере один отцеп впереди себя в направлении горба горки.
В соответствии с настоящим способом управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки осуществляется расчет скорости подвижного состава, которая должна быть у подвижного состава в соответствующей точке установки по крайней мере одного колесного датчика в момент прохождения соответствующей точки установки колесного датчика; местонахождение подвижного состава определяется с помощью системы идентификационных меток и считывателей и колесных датчиков размещенных на железнодорожных путях сортировочной горки.
В момент прохождения подвижным составом по крайней мере одного колесного датчика проверяется соответствие фактической скорости состава расчетной скорости подвижного состава в данной точке установки данного колесного датчика. В случае несоответствия фактической скорости расчетной, фактическая скорость подвижного состава приводится в соответствие с расчетной скоростью, т.е. подвижной состав либо замедляет свое движение, либо ускоряет свое движение, так что бы фактическая скорость достигла расчетной скорости.
При достижении подвижным составом горба горки запускается режим роспуска подвижного состава, в рамках которого при прохождении по крайней мере одним отцепом горба горки происходит его последовательное отделение от подвижного состава и/или локомотива под действием силы тяжести и дальнейшее скатывание по спускной части сортировочной горки.
Так же производится расчет точки остановки локомотива на надвижной части сортировочной горки, которая рассчитывается исходя из условий, что все отцепы подвижного состава отделились от локомотива и скатились по спускной части сортировочной горки, а локомотив находится на надвижной части сортировочной горки.
При достижении локомотивом данной расчетной точки, локомотив останавливается.
В настоящем изобретении раскрывается система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки, которая содержит
по крайней мере два колесных датчика, размещенных на железнодорожных путях сортировочной горки, которые способны в том числе фиксировать прохождение подвижного состава и определять количество отцепов пошедших в точке установки колесного датчика;
систему идентификационных меток и считывателей, которой оснащены железнодорожные пути и подвижной состав, при этом система идентификационных меток и считывателей содержит по крайней мере одну идентификационную метку и по крайней мере один считыватель сигналов идентификационных меток, при этом каждая идентификационная метка и каждый считыватель сигналов идентификационных меток имеет свой уникальный идентификационный номер; и
по крайней мере один блок управления, осуществляющий управление подвижным составом при осуществлении надвига и роспуска в соответствии со способом по любому из пунктов 1-8.
Сущность изобретения заключается в том, что в режиме надвига подвижного состава на протяжении всего маршрута движения по сортировочной горке от парка приема до горба горки контролируется фактическая скорость подвижного состава.
Наличие колесных датчиков на железнодорожных путях позволяет определять подвижной состав в точке установки колесных датчиков в момент прохождения подвижным составом данного колесного датчика.
В отличие от системы определения местонахождения подвижного состава с помощью блок-участков, колесные датчики не привязаны к длине и размещению рельс, а могут быть установлены в любом необходимом месте. Месторасположение колесных датчиков определяется экспертами исходя из профиля сортировочной горки, характеристик приемочного парка, характеристик распускаемого состава, заданных условий сортировки и т.д. Соответственно с помощью данного способа можно контролировать фактическую скорость подвижного состава в определенных / нужных точках, которые не привязаны к расположению стыков рельс. Так же колесные датчики могут быть установлены в любой момент, и не требуют значительных усилий, в отличие от создания изолированных блок-участков. В дополнение, местоположение таких колесных датчиков легко изменить, что дает дополнительные преимущества в перенастройке / донастройке конкретной сортировочной горки под конкретные условия работы.
В режиме роспуска подвижного состава сущность изобретения заключается в том, что на протяжении всего движения подвижного состава в направлении горба горки контролируется местонахождение локомотива с целью не допустить переваливание локомотива через горб горки и его дальнейшее скатывание по спускной части сортировочной горки: локомотив останавливается при достижении расчетной точки, которая рассчитывается исходя из условий, что все отцепы подвижного состава отцепились, а локомотив находится на надвижной части сортировочной горки.
Вышеуказанные атрибуты, черты и преимущества настоящего изобретения, а также способы их достижения, станут более ясными и понятными после ознакомления со следующим описанием способов и форм реализации изобретения, дополненного соответствующими рисунками.
В целесообразном варианте реализации данного способа перед началом движения подвижного состава в режиме надвига осуществляется проверка на наличие маршрута с выбранного железнодорожного пути надвига на выбранный горб горки в соответствии с расчетным маршрутом заданным ранее.
В случае наличия маршрута выбранного пути надвига на выбранный горб [обычно два горба] горки, т.е. когда стрелки на железнодорожных путях переведены в состояние позволяющее подвижному составу при осуществлении движения проехать с места его положения на выбранных железнодорожных путях надвига на выбранный горб горки, движение подвижного состава в режиме надвига начинается.
В другом целесообразном варианте реализации данного способа дополнительно в процессе движения подвижного состава в режиме надвига посредством колесных датчиков и системы идентификационных меток и считывателей осуществляется контроль соответствия фактического маршрута движения подвижного состава расчетному маршруту движения подвижного состава.
Предварительный расчет маршрута, и затем его проверка как перед началом движения подвижного состава, так и вовремя движения подвижного состава по надвижной части сортировочной горки позволяет избегать аварийных ситуаций на сортировочной горке, а так же оптимально использовать ресурсы: например, не начинать движение в случае отсутствия доступного маршрута движения подвижного состава, и/или во время / своевременно останавливать движение подвижного состава.
В целесообразном варианте реализации данного способа по крайней мере одна идентификационная метка или по крайней мере один считыватель расположен на горбу горки, при этом в случае прохождения локомотивом такой расположенной на горбу горки идентификационной метки или расположенного на горбу горки считывателя, происходит остановка локомотива.
Такой дополнение способа позволяет не допустить проезд локомотива на спускную часть горки. Установка такой идентификационной метки или такого считывателя на горбу горки обеспечивает дополнительную защиту от скатывания локомотива по спускной части сортировочной горки.
В стандартной ситуации расчетная точка остановки локомотива на надвижной части сортировочной горки располагается до горба горки. При достижении этой расчетной точки локомотив останавливается. Однако потенциально возможны сбои, например, в расчете такой точки. В этом случае наличие на железнодорожных путях такой расположенной на горбу горки идентификационной метки или расположенного на горбу горки считывателя, позволяет не допустить скатывания локомотива по спускной части сортировочной горки независимо от наличия и/или отсутствия расчетной точки остановки локомотива.
В соответствии с другим расширенным вариантом исполнения данного способа в рамках настоящего изобретения, по крайней мере, один колесный датчик установлен в начале надвижной части сортировочной горки. Режим надвига подвижного состава включается при прохождении подвижным составом такого колесного датчика.
Наличие такого колесного датчика в начале надвижной части горки позволяет инициировать запуск режима надвига для подвижного состава, который проехал данный колесный датчик.
В соответствии с другим вариантом исполнения данного способа в режиме роспуска подвижной состав движется непрерывно, при этом скорость движения локомотива изменяется, предпочтительно в автоматическом режиме, в зависимости от количества отцепов, которые еще не прошли горб горки и не отделились от подвижного состава и/или локомотива.
В соответствии с другим расширенным вариантом исполнения данного способа дополнительно производится расчет скорости, которая должна быть у локомотива при надвиге на горб горки каждого отцепа, для его последующего отделения от подвижного состава и скатывания по спускной части сортировочной горки.
В дополнение к этому по крайней мере один колесный датчик размещен на горбу горки таким образом, что после прохождении отцепом точки установки данного колесного датчика точно происходит последовательное отделение данного отцепа от подвижного состава и/или локомотива, в случае если в подвижном составе остался только один отцеп, и его дальнейшее скатывание по спускной части сортировочной горки. Так же данный размещенный на горбу горки по крайней мере один колесный датчик позволяет определять количество отцепов, которые прошли горб горки и последовательно отделились от подвижного состава.
В соответствии с настоящим изобретением в режиме роспуска подвижного состава после прохождения по крайнем мере одним отцепом такого расположенного на горбу горки колесного датчика происходит изменение фактической скорости движения локомотива, так чтобы фактическая скорость движения локомотива соответствовала расчетной скорости локомотива при надвиге на горб горки соответствующего отцепа, который является следующим для отделения от подвижного состава и скатывания по спускной части сортировочной горки.
Такое дополнение позволяет осуществить роспуск подвижного состава за минимальное время и с минимальным количеством остановок.
В соответствии с другим вариантом исполнения данного способа в режиме надвига подвижного состава и в режиме роспуска подвижного состава информация содержащая по крайней мере данные о фактической скорости подвижного состава, а так же информация из системы идентификационных меток и считывателей о местонахождении подвижного состава, например данные о пройденных подвижным составом идентификационных метках в случае их расположения на железнодорожных путях, передается в информационную систему.
Это позволяет осуществлять контроль движения локомотива и подвижного состава со стороны.
В соответствии с другим вариантом исполнения системы управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки считыватель сигналов идентификационных меток размещен на локомотиве, а по крайней мере одна идентификационная метка расположена на железнодорожных путях.
Размещение идентификационных меток именно на железнодорожных путях рационально, так как идентификационные метки в отличие от считывателей энергонезависимы и могут быть размещены в любой точке железнодорожных путей. Так как на локомотиве легко организовать энергопитание считывателя, его удобнее размещать именно на локомотиве.
В соответствии с расширенным вариантом исполнения системы управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки
по крайней мере одна идентификационная метка расположена на горбу горки, и предназначена для предотвращения скатывания локомотива на спускную часть сортировочной горки,
по крайней мере один колесный датчик установлен в начале надвижной части сортировочной горки, и предназначен для определения начала режима надвига, а так же
по крайней мере один колесный датчик размещен на горбу горки, так что при прохождении отцепом точки установки данного колесного датчика происходит последовательное отделение такого отцеп от подвижного состава и его дальнейшее скатывание по спускной части сортировочной горки.
Преимуществом такого размещения колесных датчиков и идентификационных меток является своевременный запуск режима надвига, недопущение скатывание локомотива на спускную часть сортировочной горки, а так же своевременно изменение скорости локомотива для достижения минимального времени роспуска подвижного состава.
Далее изобретение поясняется подробнее со ссылкой на прилагаемые схематичные чертежи, иллюстрирующие примерные варианты осуществления изобретения, на которых показано:
Фиг. 1 - схема сортировочной горки, а именно профиль сортировочной горки, а так же размещение железнодорожных путей.
Фиг. 2 - схема системы управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки в соответствии с настоящим изобретением.
Фиг. 3 - блок-схема управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки в соответствии с настоящим изобретением.
Последующее описание некоторых примеров осуществления изобретения дано с тем, чтобы пояснить принципы изобретения и его практическую применимость, тем самым давая возможность другим специалистам понять изобретение в различных вариантах осуществления и с различными модификациями, какие подходят для конкретного задуманного применения. Данное описание не претендует на то, чтобы быть исчерпывающим или ограничивающим изобретение точными описанными вариантами осуществления.
Далее, на последующих чертежах элементы, которые являются не обязательными и/или не существенными для реализации настоящего изобретения, но вместе с тем присущи обычным решениями в данной области техники, для облегчения изложения не отражены.
На представленных фигурах одинаковые элементы обозначены теми же ссылочными позициями.
Далее описаны и способ, и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки.
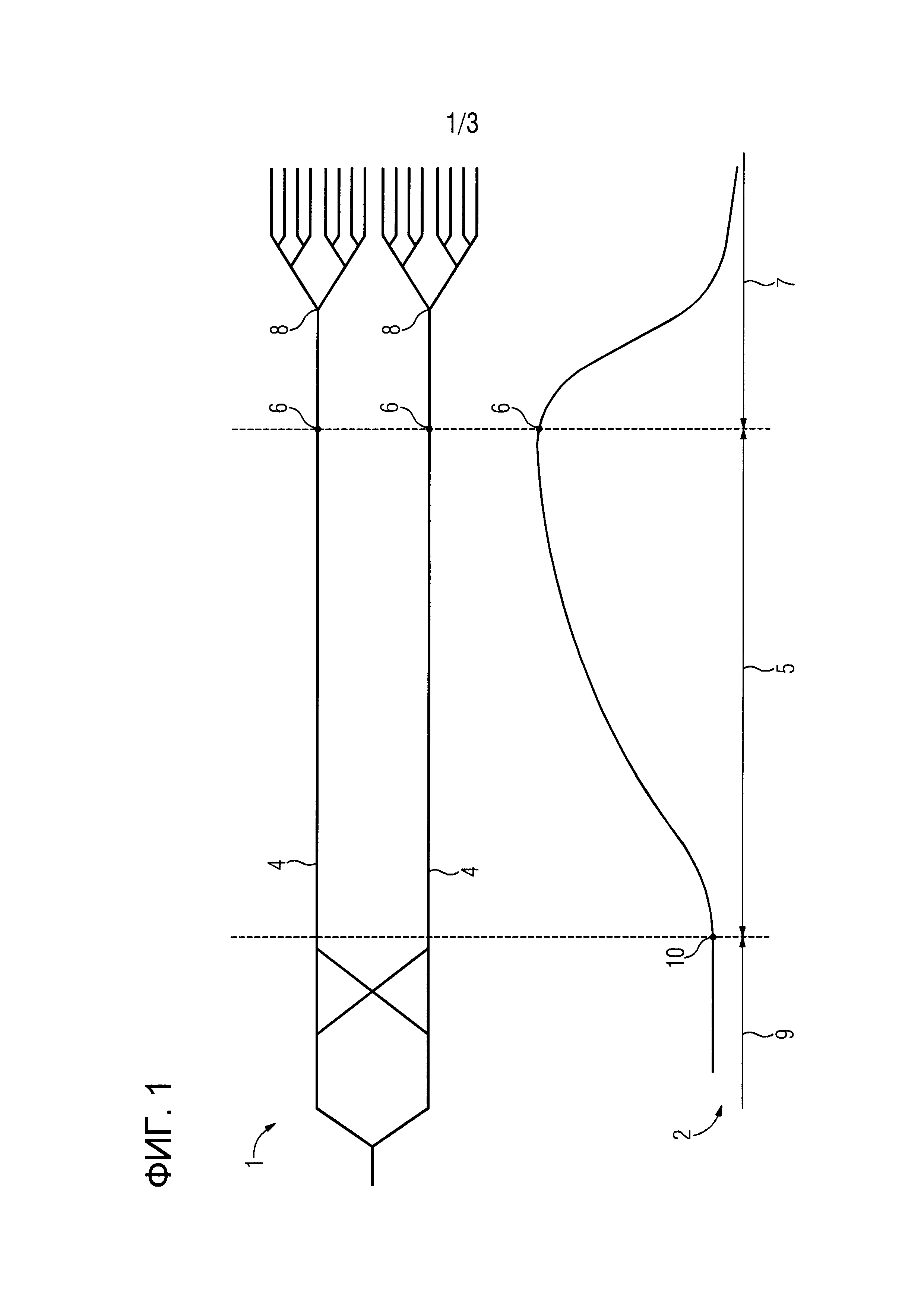
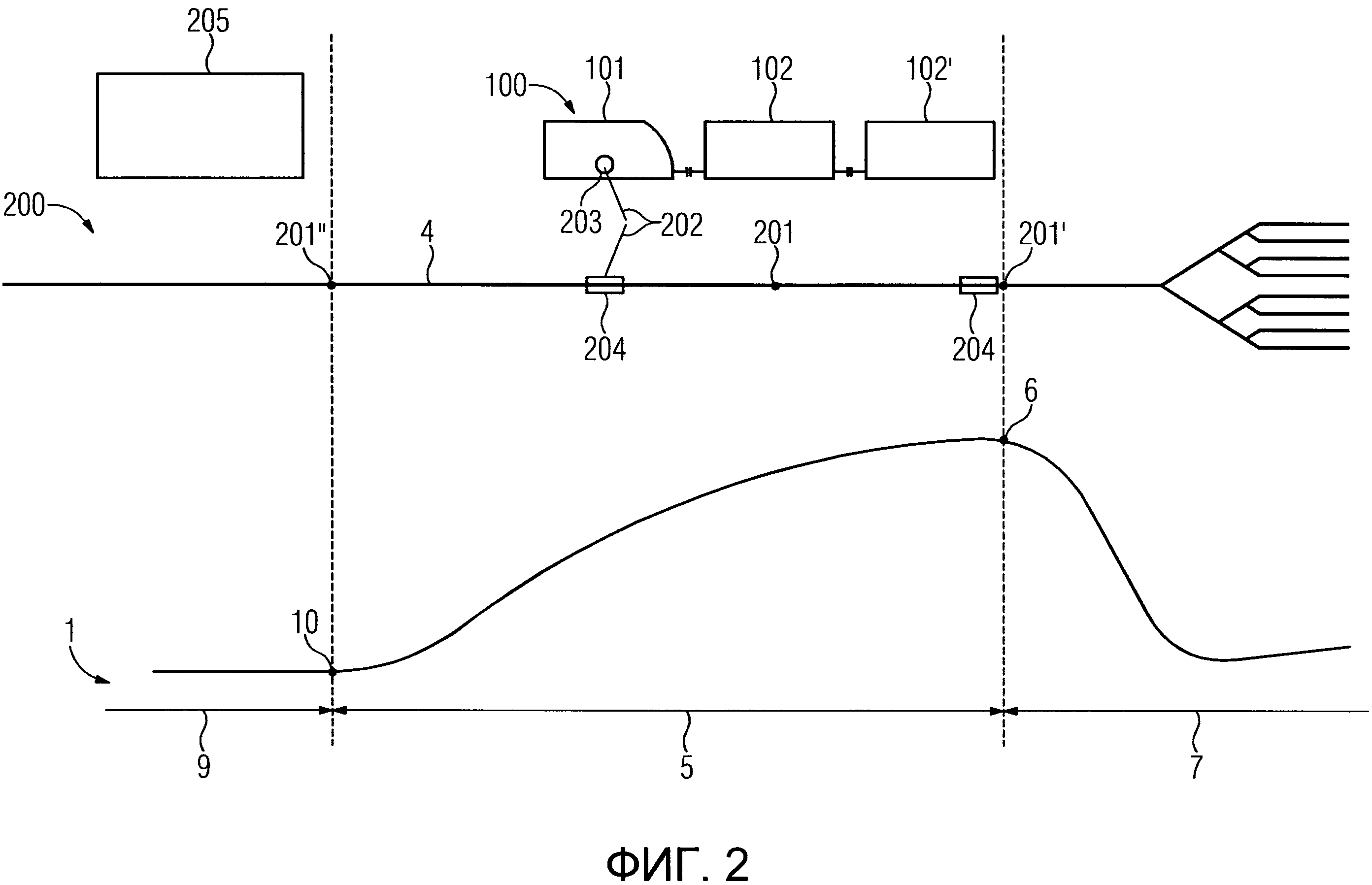
На ФИГ 2 представлена схема сортировочной горки 1, схема подвижного состава 100 и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки 200.
Сортировочная горка 1, как это было описано ранее, имеет надвижную часть 5, горб горки 6, а так же спускную часть 7. При этом перед сортировочной горкой 1 обычно имеется парк приема 9 подвижных составов, которые необходимо распустить / расформировать. Чаще всего сортировочная горка 1 на надвижной части 5 два железнодорожных пути надвига 4 и соответственно два горба горки 6.
Принцип действия самой сортировочной горки 1 хорошо известен: сортируемый подвижной состав 100 по железнодорожным путям 4 на надвижной части 5 (железнодорожные пути надвига 4) сортировочной горки 1 постепенно надвигается локомотивом 101 на горб горки 6, перевалив за который, отцепы 102 самостоятельно под действием силы тяжести далее скатываются по крутому спуску спускной части 7 на разветвляющиеся пути сортировочного парка.
Подвижной состав 100, в котором имеется по крайней мере один локомотив 101 и по крайней мере один отцеп 102, состоящий из одного вагона или группы сцепленных вагонов, движется в сторону горба горки 6.
В подвижном составе 100 может быть только один отцеп 102, например состоящий из одного вагона. Но такая ситуация встречается редко. Обычно подвижной состав 100 подлежащий роспуску состоит из множества отцепов 102.
Локомотив 101, обычно маневровый локомотив, толкает впереди себя отцепы 102 по направлению к горбу горки 6, т.е. надвигает отцепы 102 на соответствующий горб горки 6.
Система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки 200 содержит
по крайней мере два колесных датчика 201;
систему идентификационных меток и считывателей 202, которая содержит по крайней мере одну идентификационную метка 203 и по крайней мере один считыватель 204; а так же
по крайней мере один блок управления 205.
Колесные датчики 201 известны из уровня техники. Такие колесные датчики позволяют фиксировать прохождение колес вагонов, определять направление движения вагонов, а так же считать оси отцепов, а следовательно зная количество осей в одном вагоне и/или отцепе, определять количество вагонов и/или отцепов прошедших в точке расположения колесного датчика 201.
Например, известен колесный датчик WSD Е производства Siemens AG, который представляет собой электронное устройство, срабатывающее под действием электропроводных предметов, в частности гребней колес. Такой датчик работает бесконтактным способом и применяется для решения разнообразных задач средств связи и сигнализации.
Количество и размещение колесных датчиков 201 на сортировочной горке 1, а именно на железнодорожных путях 4 определяется экспертами, в том числе исходя из профиля сортировочной горки 1, заданных условий сортировки и роспуска подвижных составов, и т.д.
Однако предпочтительно иметь хотя бы два колесных датчика 201 в системе управления подвижным составом подвижным составом при осуществлении надвига и роспуска с сортировочной горки 200.
Один из этих двух колесных датчиков 201 разместить в начале надвижной части 5 сортировочной горки. Данный колесный датчик 201 позволит правильно определять момент запуска режима надвига подвижного состава.
Другой из этих двух колесных датчиков 201 предпочтительно разместить на горбу горки 6. Данный колесный датчик позволит определять количество отцепов 102, которые уже отделились от подвижного состава 100, и соответственно, зная количество отцепов 102 в подвижном составе 100, определить количество отцепов 102 все еще надвигаемых локомотивом 101. Следовательно, становится возможным своевременно изменять фактическую скорость локомотива 101 в режиме роспуска подвижного состава 100, чтобы достичь безопасного роспуска подвижного состава (в частности, отсутствия столкновений отцепов на спускной части 7 сортировочной горки 1) и минимального времени роспуска подвижного состава 100.
В дополнение к этому, так как колесные датчики 201 позволяют фиксировать прохождение колес подвижного состава 100, и определять направление движения подвижного состава 100, то зная расположение колесных датчиков 201 на сортировочной горке 1, а именно на железнодорожных путях 4, можно определять местоположение подвижного состава 100 на сортировочной горке 1.
Система идентификационных меток и считывателей 202 может содержать множество идентификационных меток 203 и множество считывателей 204, при этом каждая из идентификационных меток 203 и каждый из считывателей 204 имеет свой уникальный идентификационный номер. Это позволяет отслеживать / определять какой конкретно считыватель сигналов идентификационных меток 204 считал сигнал какой конкретно идентификационной метки 203, а следовательно определять взаимное местонахождение конкретной идентификационной метки 203 и конкретного считывателя сигналов идентификационных меток 204.
Такие системы идентификационных меток и считывателей 202 известны из уровня техники. Они могут быть контактными, или бесконтактными.
Системой идентификационных меток и считывателей 202 оснащены подвижной состав 100 и сортировочная горка 1, а именно железнодорожные пути 4. При этом возможно несколько вариантов установки этой системы 202. В одном случае возможна установка идентификационных меток 203 на подвижной состав 100, а считывателей сигналов идентификационных меток 204 - на сортировочную горку 1, а именно на железнодорожные пути 4. Но, так как идентификационные метки 203 чаще всего энергонезависимы, то предпочтительно устанавливать данные идентификационные метки 203 на железнодорожные пути 4, а считыватель сигналов идентификационных меток 204 на подвижной состав 100. При этом достаточно установить один считыватель сигналов идентификационных меток 204 на локомотив 101. Установка считывателей сигналов идентификационных меток 204 на отцепы является дорогостоящим мероприятием, и в этом просто нет необходимости. Данный вариант реализации системы управления подвижным составом при осуществлении надвига и роспуска 200 показан на рисунках и чертежах к настоящему изобретению.
Принцип работы системы идентификационных меток и считывателей 202 известен из уровня техники: локомотив 101 с установленным на него считывателем сигналов идентификационных меток 204 проезжает по железнодорожным путям, но который установлены идентификационные метки 203. При этом в момент проезда локомотива 101 над или рядом с идентификационной меткой 204 происходит считывание сигнала данной идентификационной метки 204 с уникальным идентификационным номером считывателем сигнала идентификационных меток 203, который установлен на локомотиве 101. Так как расположение каждой идентификационной метки 203 на железнодорожных путях известно, а так же известен уникальный идентификационный номер считывателя 204 установленного на конкретном локомотиве 101, то в момент прохождения локомотива 101 рядом с идентификационной меткой 203 возможно определить местоположение локомотива 101 на железнодорожных путях 4 сортировочной горки 1. Так как локомотив 101 толкает перед собой отцепы 102 в направлении горба горки 6, то становится возможным определить местоположение на сортировочной горке 1 всего подвижного состава 100.
В дополнение к вышесказанному система идентификационных меток и считывателей 202 способна определять направление движения подвижного состава 100, а в случае с установленным на локомотиве 101 считывателе сигналов идентификационных меток 204 - направление движения локомотива 101.
Это может быть реализовано, например, путем размещения в месте установки идентификационной метки 203 на железнодорожных путях двух датчиков идентификационной метки 203 на небольшом расстоянии друг от друга. Тогда по тому с какого датчика идентификационной метки 203 сигнал был считан первым, можно определить направление движения локомотива 101.
Количество и расположение идентификационных меток 203 и считывателей сигналов идентификационных меток 204 на сортировочной горке 1 и на подвижном составе 100 определяется экспертным путем, и зависит в том числе от характеристик сортировочной горки 1, от заданных условий сортировки и роспуска, и т.д.
Так же система управления подвижным составом подвижным составом при осуществлении надвига и роспуска с сортировочной горки 200 содержит по крайней мере один блок управления 205, который осуществляет управление подвижным составом 100 при осуществлении надвига и роспуска в соответствии со способом по любому из пунктов 1-8 настоящего изобретения.
Блок управления 205 может представлять собой например, контроллер, процессор, персональный компьютер, портативный компьютер, отдельный электронный блок управления встроенный в систему управления локомотива, или встроенный во внешнюю систему управления всей сортировочной станцией, и т.д.
Принцип работы системы управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки 200 заключается в осуществлении способа управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки 300 (Фиг. 3), который описан далее.
В режиме надвига 301 подвижного состава 100, подвижной состав 100 движется по надвижной части 5 сортировочной горки 1 в направлении горба горки 6, при этом движение подвижного состава 100 осуществляется по крайней мере одним локомотивом 101, который надвигает по крайней мере один отцеп 102 впереди себя в направлении горба горки 6.
В предпочтительном варианте реализации данного способа, по крайней мере один колесный датчик 201' установлен в начале надвижной части 5 сортировочной горки 1 после парка приема 9, и режим надвига 301 подвижного состава 100 включается при прохождении подвижным составом 100 такого колесного датчика 201'. Это может быть реализовано следующим образом, при прохождении первой оси самого дальнего от локомотива 101 отцепа 102 такого колесного датчика 201'. включается режим надвига 301 подвижного состава 100.
Так же в предпочтительном варианте реализации способа 300, так как
железнодорожных путей 4 на сортировочной горке 1 может быть много, а том числе может быть несколько железнодорожных путей надвига 4 (обычно два железнодорожных пути надвига), и
соответственно, может быть много горбов горки 6 (обычно два горба горки), так как каждый путь надвига 4 по сути заканчивается горбом горки 6, то
перед началом движения подвижного состава 100 в режиме надвига 301 предпочтительно определить расчетный маршрут движения подвижного состава 100 по надвижной части 5 сортировочной горки 1, а
перед началом движения подвижного состава 100 в режиме надвига 301 осуществить проверку доступности данного маршрута, а именно положения стрелок на железнодорожных путях 4 на наличие маршрута с выбранного пути надвига 4 на выбранный горб горки 6 в соответствии с расчетным маршрутом движения подвижного состава 100.
В случае наличия такого маршрута выбранного пути надвига 4 на выбранный горб горки 6 движение подвижного состава 100 в режиме надвига 301 начинается.
В предпочтительном варианте реализации способа 300 в процессе движения подвижного состава 100 в режиме надвига 301 по надвижной части 5 сортировочной горки 1 осуществляется контроль соответствия фактического маршрута движения подвижного состава 100 расчетному маршруту движения подвижного состава 100 посредством колесных датчиков 201 и системы идентификационных меток и считывателей 202.
При движении в режиме надвига 301 по надвижной части 5 сортировочной горки 1 постоянно определяется / контролируется местонахождение подвижного состава 100. Это становиться возможным, так как сортировочная горка 1 и подвижной состав 100 оснащены колесными датчиками 201, 201', 201'' а так же системой идентификационных меток и считывателей 202.
Точность определения местонахождения подвижного состава зависит от количества и расположения размещенных колесных датчиков 201, которые фиксируют факт прохождения подвижного состава 100, и размещенных на железнодорожных путях идентификационных меток 203 или считывателей сигналов идентификационных меток 204.
Также для осуществления режима надвига 301 подвижного состава 100 производится расчет скорости подвижного состава 100 в каждой точке маршрута движения подвижного состава 100 в местах расположения колесных датчиков 201, 201', 201''. И при движении подвижного состава 100 в режиме надвига 301 в момент прохождения подвижным составом 100 колесного датчика 201, 201', 201'', проверяется соответствие фактической скорости подвижного состава 100 расчетной скорости подвижного состава 100 в данной точке. Другими словами, в момент когда конкретный колесный датчик 201, 201', 201'' фиксирует прохождение подвижного состава 100, производится проверка фактической скорости подвижного состава и расчетной скорости подвижного состава 100 в данной точке. В случае несоответствия фактической скорости расчетной, фактическая скорость подвижного состава 100 приводится в соответствие с расчетной скоростью для местоположения соответствующего колесного датчика 201, 201', 201''.
Это может быть реализовано разными способами. Например, колесный датчик 201, 201', 201'' в момент фиксации прохождения подвижного состава 100 может направлять сигнал об этом в блок управления 205, который в свою очередь получать информацию о скорости движения локомотива 101 от систем самого локомотива 101. Далее путем механического и/или автоматического воздействия на силовую установку локомотива 101 производится корректировка скорости локомотива 101 - скорость локомотива 101 увеличивается или уменьшается.
При достижении подвижным составом 100 горба горки 6 запускается режим роспуска 302 подвижного состава 100. В рамках режима роспуска 302 при прохождении по крайней мере одним отцепом 102'. горба горки 6 происходит его последовательное отделение от подвижного состава 100 и/или локомотива 101 (в случае если в надвигаемом подвижном составе 100 остался и/или имеется только один отцеп 102') и дальнейшее скатывание по спускной части 7 сортировочной горки 1.
Локомотив 101 надвигает один или несколько отцепов 102 на горб горки 6. Отцепы 102 могут быть, как соединены друг с другом, так и уже находится в расцепленном состоянии. В принципе так как локомотив 101 нет необходимости толкает / надвигает отцепы 102 в гору, то нет необходимости жестко соединять отцепы 102 между собой и/или с локомотивом 101, так как сам подвижной состав 100 находится в сжатом состоянии.
Однако, в случае если отцепы 102 подвижного состава 100 все таки соединены друг с другом, то одни должны быть расцеплены либо еще при движении подвижного состава 100 в режиме надвига 301, либо при движении подвижного состава 100 в режиме роспуска. Основным условием является то, что в момент подхода крайнего, дальнего от локомотива отцепа 102', к горбу горки 6, данный отцеп 102' уже должен быть не соединен с другим отцепом 102 и/или локомотивом 101. Т.е. при прохождении данным отцепом 102' колесного датчика 201', данный отцеп 102' должен находиться в отсоединенном состоянии от соседнего отцепа 102 или локомотива 101, в случае если в подвижном составе остался только данный отцеп 102' и локомотив 101, только крайний, самый дальний от локомотива 101 отцеп 102' переваливает через горб горки 6 на спускную часть 7 сортировочной горки 1, то под действием силы тяжести на скоростном уклоне спускной части 7 сортировочной горки 1 данный отцеп 102 отделяется от подвижного состава 100 и набирает скорость, и начинает самостоятельно движение по спускной части 7 сортировочной горки 1.
При этом количество отцепов, которые толкает / надвигает локомотив 101, в подвижном составе 100 уменьшается, и следующий, самый крайний и дальний отцеп надвигается на горб горки 6 для последующего отделения. В момент когда все отцепы 102, 102' отделились от локомотива 101, локомотив 101 должен остановиться. Одной из основных задач является обеспечение безопасности роспуска состава, т.е. что бы отцепы 102, отделяясь от подвижного состава 100 и скатываясь по спускной части 7 сортировочной горки не сталкивались друг с другом. Т.е. другими словами необходимо обеспечить такой интервал между прохождением отцепами 102 горба горки 2, чтобы отцепы 102 успевали уйти на разные пути сортировочного парка не столкнувшись друг с другом. При этом локомотив должен двигаться непрерывно.
Для осуществления такого роспуска в соответствии с настоящим изобретением в режиме роспуска 301 подвижной состав 100 движется непрерывно, при этом скорость движения локомотива 101 изменяется в зависимости от количества отцепов 102 в подвижном составе 100, которые еще не прошли горб горки 6 и не скатились со спускной части 7 сортировочной горки 1.
Это можно реализовать следующим образом при наличии размещенного на горбу горки 6 по крайней мере одного колесного датчика 201. Такой колесный датчик 201 должен быть установлен в такой точке на горбу горки 6, после прохождения которой точно происходит последовательное отделение данного отцепа 102' от подвижного состава 100 и его дальнейшее скатывание по спускной части 7 сортировочной горки 1. Таким образом становится возможным в каждый момент времени роспуска подвижного состава 100 знать сколько отцепов осталось в подвижном составе 100, а имея данные о последовательности отцепов 102 в подвижном составе 100 знать какой конкретно отцеп 102 и с какими характеристиками (вес, количество вагонов в отцепе, скоростные характеристики отцепа, и т.д.) будет следующим надвигаться для роспуска.
Предварительно, возможно до начала режима надвига 301 подвижного состава, или во время реализации режима надвига 301 в рамках настоящего изобретения в соответствии со способом 300 производится расчет скорости, которая должна быть у локомотива 101 при надвиге на горб горки каждого отцепа 102', для его последующего отделения от подвижного состава 100 и скатывания по спускной части сортировочной горки 1, когда данный отцеп 102' является крайним, самым дальним от локомотива 101, в подвижном составе 100.
Расчетная скорость движения локомотива 101 при надвиге конкретного отцепа 102 рассчитывается экспертным путем, и учитывает, в том числе, характеристики сортировочной горки 1, характеристики отцепа 102, который надвигается на гор горки 6, и характеристики отцепа 102, который отцепился от подвижного состава 100 перед ним, длину подвижного состава 100 на момент надвига отцепа 102, и т.д.
Расчетная скорость движения локомотива 101 должна с одной стороны обеспечивать необходимый, заданный экспертным путем, интервал между отцепами 102 последовательно отделяющимися от подвижного состава 100, а так же должна обеспечивать минимальное время роспуска подвижного состава 100. В идеальном варианте такой роспуск должен происходить без остановок движения подвижного состава 100.
В режиме роспуска 302 подвижного состава 100 после прохождения по крайнем мере один отцепом 102 (такой отцеп 102 является крайним, самым дальним от локомотива 101) такого расположенного на горбу горки колесного датчика 201' происходит изменение фактической скорости движения локомотива 101, так чтобы фактическая скорость движения локомотива 101 соответствовала расчетной скорости локомотива 101 при надвиге на горб горки 6 соответствующего отцепа 102', который является следующим для отделения от подвижного состава 100 и скатывания по спускной части 7 сортировочной горки 1.
Так же в рамках настоящего способа 300 производится расчет точки остановки локомотива 101 на надвижной части 5 сортировочной горки 1, которая рассчитывается исходя из условий, что все отцепы 102 подвижного состава 100 отделились от локомотива 101, а локомотив 101 находится на надвижной части 5 сортировочной горки 1. При достижении расчетной точки остановки локомотив 101 в соответствии с настоящим изобретением останавливается.
Это позволяет избежать излишнего пробега локомотива 101 до горба горки 6, и соответственно приводит к экономии ресурсов при возврате локомотива 101 на исходные позиции в парк приема для начала процесса расформирования следующего подвижного состава 100.
Также для предотвращения скатывания локомотива 101 в предпочтительном варианте реализации настоящего изобретения, по крайней мере одна идентификационная метка 203 или по крайней мере один считыватель сигналов идентификационной метки 204 расположен на горбу горки 6. При этом в случае прохождения локомотивом такой расположенной на горбу горки идентификационной метки 203 или расположенного на горбу горки считывателя 204, происходит остановка локомотива 101.
В предпочтительном варианте реализации данного способа в режиме надвиге 301 подвижного состава 100 и в режиме роспуска 302 подвижного состава 101 информация содержащая по крайней мере данные о фактической скорости подвижного состава 100, а так же информация из системы идентификационных меток и считывателей 202 о местонахождении подвижного состава 100 передается в информационную систему, например для дальнейшей обработки, либо просто хранения. Такой информационной системой может быть система управления сортировочной станцией, или персональный компьютер. Данные могут передаваться, например, беспроводным путем, например блоком управления 205.
Хотя изобретение и было подробно проиллюстрировано и описано при помощи предпочтительных способов и форм его воплощения / конструктивного исполнения, изобретение не ограничивается и не исчерпывается приведенными примерами. Имеющие необходимую квалификацию и опыт в данной сфере могут вывести и другие варианты, не выходя за пределы охраны указанного в заявке изобретения.
Перечень ссылочных обозначений
1 - сортировочная горка
2 - профиль сортировочной горки
3 - схема расположения железнодорожных путей на сортировочной горке
4 - железнодорожный путь, железнодорожный путь надвига
5 - надвижная часть сортировочной горки
6 - горб горки
7 - спускная часть сортировочной горки
8 - стрелочная горловина
9 - парк приема
10 - начало надвижной части сортировочной горки
100 - подвижной состав
101 - локомотив
102, 102' - отцеп
200 - система управления составом при осуществлении надвига и роспуска с сортировочной горки
201, 201', 201'' - колесные датчики
202 - система идентификационных меток и считывателей
203 - считыватель сигналов идентификационных меток
204 - идентификационная метка
300 - способ
301-302 режимы способа
"интеллектуальная" дистанционная распорка и способ мониторинга воздушных линий
Способ измерения расхода жидкости на отдельном участке сети подачи жидкости
Устройство контроля и управления пружинно-гидравлического вагонного замедлителя
Система контроля перемещения подвижных объектов на железнодорожной станции
Система закрепления составов на путях железнодорожной станции
Способ и система для прицельного торможения подвижного состава
Способ восстановления движения поездов на участке железной дороги с использованием мобильного комплекса микропроцессорной системы управления стрелками и светофорами
Мобильный комплекс микропроцессорной системы управления стрелками и светофорами участка железной дороги
Система маневровой автоматической локомотивной сигнализации (малс)
Система горочной автоматической локомотивной сигнализации с использованием радиоканала (галс р)
Интеллектуальный блок управления горочным стрелочным электроприводом

