Результат интеллектуальной деятельности: Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы
Вид РИД
Изобретение
Изобретение относится к средствам многопозиционной локации и картографирования земной поверхности с помощью бортовых радиолокационных станций (БРЛС), установленных на летательных аппаратах (ЛА).
Известны способы формирования радиолокационного изображения (РЛИ) в передней зоне обзора с помощью нескольких разнесенных БРЛС, которые позволяют формировать РЛИ с высокой разрешающей способностью по координате азимут, до 1 метра [1-7].
Для решения задачи картографирования земной поверхности указанные способы [1-7] отработаны и реализованы на практике, однако они имеют следующие ограничения.
При решении задач обнаружения целей и повышения точности координат их позиции, алгоритмы, реализуемые в предложенном способе, должны быть модифицированы. В частности, если на подстилающей поверхности в передней зоне наблюдения двухпозиционной системы находятся наземные движущиеся цели (ДЦ), то при формировании РЛИ они воспринимаются как неподвижные. При этом отметки от ДЦ на сформированном РЛИ будут сдвинуты и размыты относительно своего «истинного» положения - так называемый эффект «миграции», возникающий при наличии у цели радиальной скорости и ускорения.
Размытие отметки ДЦ происходит как по азимутальной координате, так и по координате дальность. Возникают погрешности в определении координат положения ДЦ и, как следствие, происходит перетекание ДЦ в соседние элементы разрешения формируемого РЛИ.
Наиболее близким по технической сущности аналогом, принятым за прототип предлагаемого изобретения, является способ фронтального синтезирования апертуры антенны земной поверхности с исключением слепых зон в передней зоне с помощью многопозиционной радиолокационной системы [7].
Согласно прототипу фронтальный участок земной поверхности посредством переднебокового обзора синхронно облучают зондирующими сигналами двухлучевых антенных систем БРЛС, установленных на движущихся параллельными курсами с расстоянием d друг от друга летательных аппаратах, количество N которых определяется протяженностью обследуемого участка поверхности. Антенны каждой БРЛС сориентированы для левого и правого переднебокового обзора так, чтобы облучаемые соседние зоны имели перекрытие. При обработке отраженных сигналов формируют два РЛИ высокого разрешения от облучаемых участков земной поверхности в направлении облучения двух антенн, используя алгоритм синтезирования апертуры, после чего на одном из N летательных аппаратов по данным, передаваемым посредством каналов радиосвязи, формируют окончательное фронтальное изображение РЛИ в передней зоне обзора.
Основными ограничениями способа по прототипу являются сложность выполнения селекции движущихся целей (ДЦ) и коррекции их координат на сформированном РЛИ с помощью многопозиционной системы бортовых РЛС.
Техническим результатом предлагаемого изобретения является обеспечение возможности селекции неподвижных и движущихся целей с коррекцией координат движущихся целей на сформированном радиолокационном изображении.
В отличие от прототипа предлагаемый способ реализуется с использованием алгоритма пересчета в единую систему координат, на основе трех измеренных дальностей (между летательными аппаратами, от первой БРЛС до цели и от второй БРЛС до цели), что позволяет однозначно идентифицировать неподвижные и движущиеся объекты (цели) с помощью комплексной обработки первичных радиолокационных данных, полученных при одновременном облучении передней зоны обзора двумя лучами бортовых антенн, разнесенных в пространстве.
Сущность изобретения заключается в том, что в способе локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы, основанном на синхронном облучении участка исследуемой поверхности двухлучевыми антеннами с фазированными антенными решетками основной и дополнительной бортовых радиолокационных станций (БРЛС), которые установлены на движущихся параллельными курсами на одной высоте летательных аппаратах (ЛА), левый луч антенны основной БРЛС и правый луч антенны дополнительной БРЛС ориентированы вдоль векторов путевой скорости соответствующих ЛА и облучают переднюю зону обзора, одновременно правым лучом антенны основной БРЛС облучают область переднего обзора правого луча антенны дополнительной БРЛС, левым лучом которой облучают область переднего обзора левого луча антенны основной БРЛС, затем, в процессе совместной обработки первичных радиолокационных изображений (РЛИ) основной и дополнительной БРЛС производят сравнение азимутов целей, вычисленных по значениям дальностей целей на первичных РЛИ и расстояния между БРЛС, и азимутов целей на первичном РЛИ дополнительной БРЛС, если эти значения не совпадают, классифицируют цель как движущуюся и корректируют ее положение, выполняя пересчет параметров изображения, наблюдаемого дополнительной БРЛС, в псевдо - наблюдаемое РЛИ основной БРЛС, после чего путем сравнения дальностей целей, полученных в соседних периодах зондирования, определяют вектор скорости движущейся цели.
Сущность изобретения поясняется чертежами, на которых представлены:
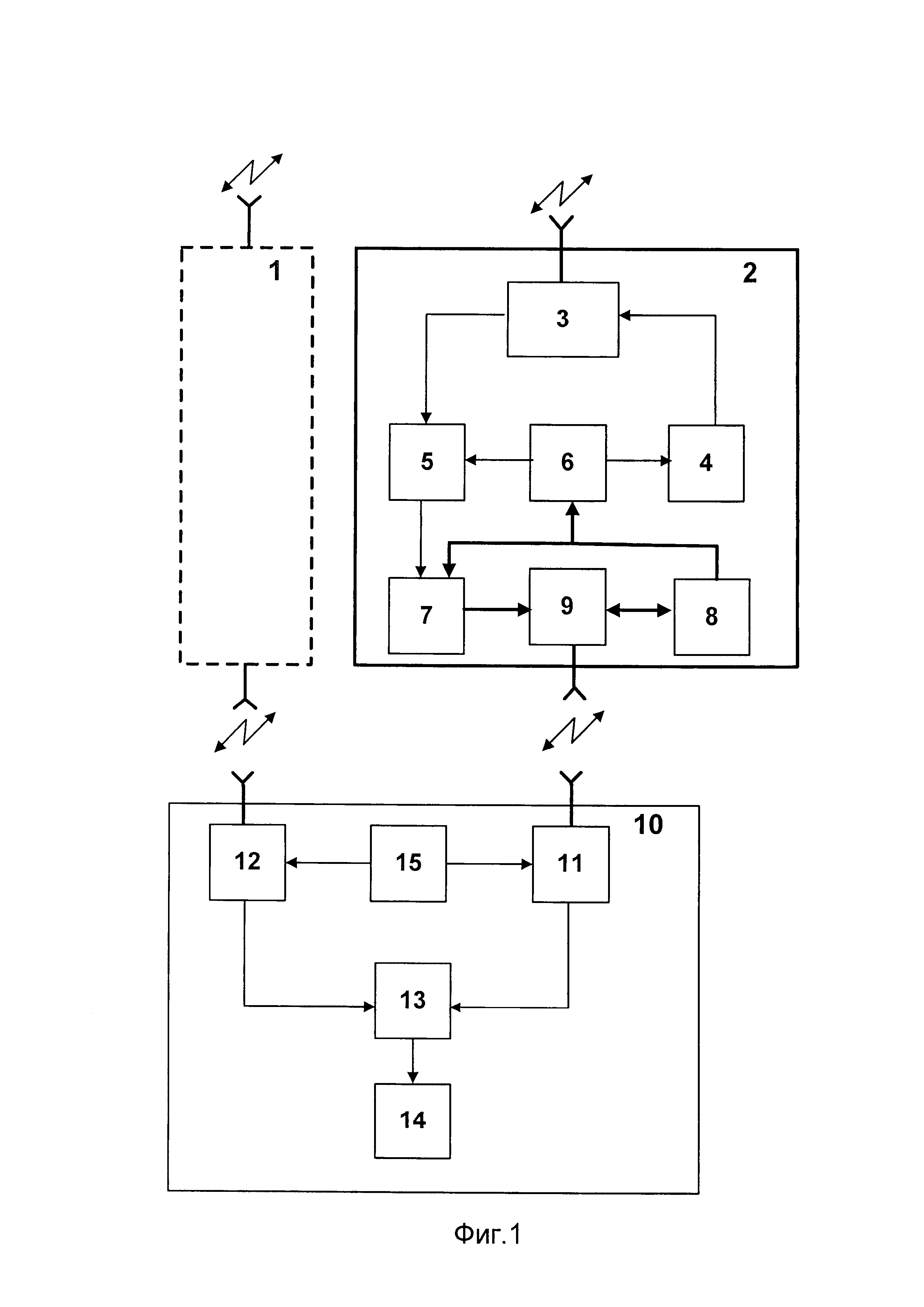
фиг. 1 - структурная схема двухпозиционной системы бортовых радиолокационных станций,
фиг. 2 - схемы облучения передней зоны обзора левыми (2а) и правыми (2б) антеннами БРЛС,
фиг. 3 - схемы определения «истинного» положения неподвижной (3а) и движущейся (3б) целей,
фиг. 4а - 4г - схемы перемещения движущихся целей,
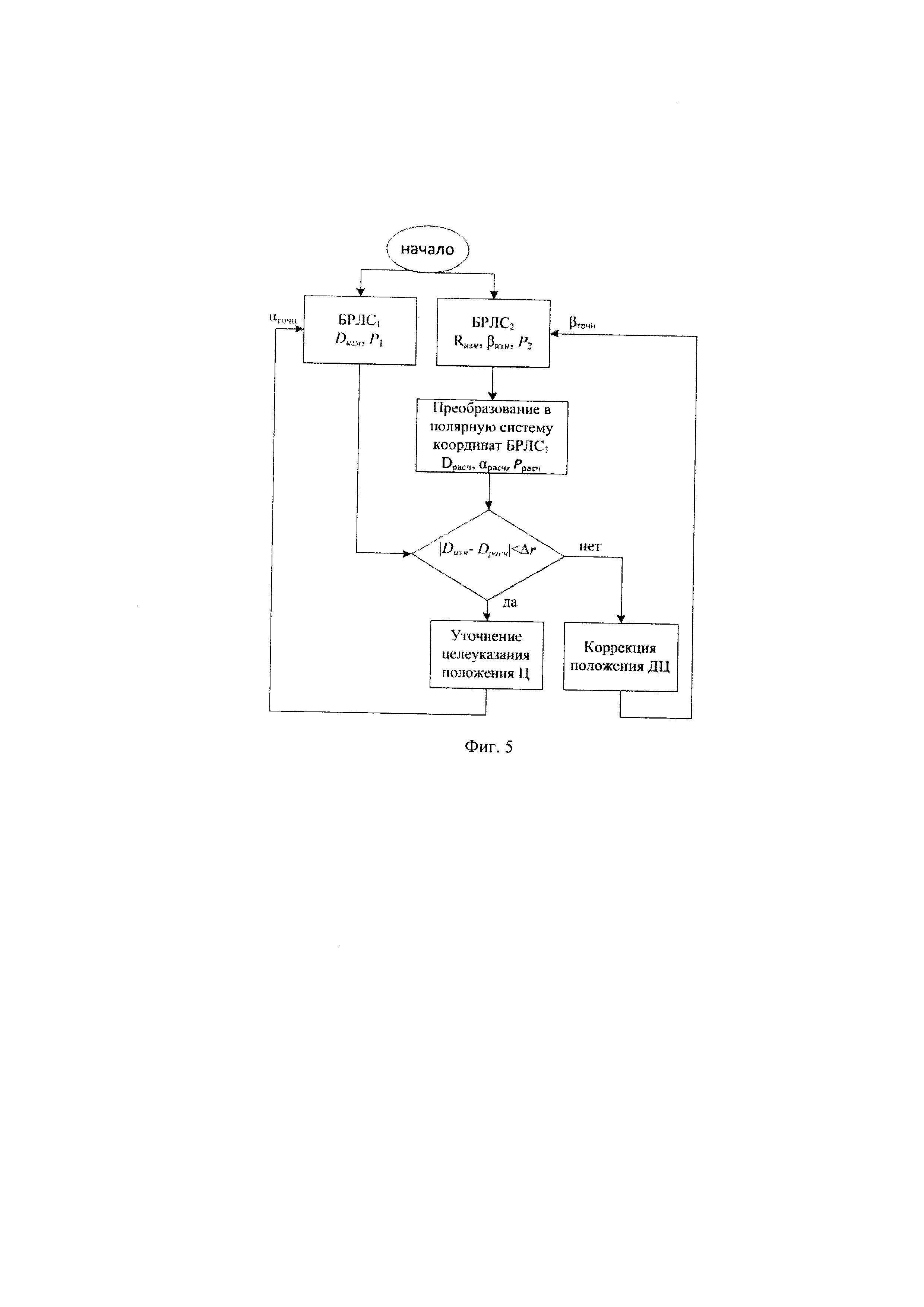
фиг. 5 - блок-схема схема алгоритма уточнения координат целей
Согласно фиг. 1 устройство локации целей в передних зонах обзора двухпозиционной системы бортовых радиолокационных станций содержит основную и дополнительную бортовые радиолокационные станции 1, 2 (БРЛС1, БРЛС2), установленные на движущихся параллельными курсами на одной высоте и на расстоянии d друг от друга летательных аппаратах (ЛА). Каждая из БРЛС содержит двухлучевую антенну 3 с фазированной антенной решеткой, соединенную с передающим и приемным устройствами 4, 5, работа которых синхронизируется сигналами синхронизатора 6.
Также в состав БРЛС 1 и 2 входят: процессор данных, устройство регистрации навигационных данных, устройство для обеспечения канала связи, известные из прототипа (для простоты на фиг. 1 не показаны).
Выход приемного устройства 5 соединен с устройством 7 обработки и формирования первичного радиолокационного изображения, второй вход которого и вход синхронизатора 6 связаны с выходом устройства 8 задания режима работы БРЛС, а выход соединен с блоком 9 обеспечения приема-передачи данных по каналу связи в центральное устройство 10 управления и обработки информации.
Устройство 10 содержит блоки 11, 12 обеспечения приема-передачи данных по каналу связи, на которые поступает информация из БРЛС 1, 2, устройство 13 совместной обработки и формирования итогового радиолокационного изображения, и блок 14 отображения информации (видеомонитор). В общем случае, при использовании звена из нескольких летательных аппаратов, в состав центрального устройства входит также устройство 15 формирования полетного задания и управления полетом, которое соединено с блоками 11, 12. В частном случае, устройство 13 совместной обработки и формирования итогового РЛИ может входить в состав основной БРЛС 1, при этом информационный массив данных из устройства 7 БРЛС 1 поступает в него непосредственно по интерфейсному каналу, а информационный массив дополнительной БРЛС 2 - через внешний канал связи.
Центр 10 управления и обработки информации также может находиться на одном из ЛА, куда по каналам системы связи собирается информация от всех БРЛС и где синтезируется итоговое псевдо-РЛИ.
Способ локации целей двухпозиционной системой БРЛС 1, 2 функционирует следующим образом.
Из устройства 15 формирования полетного задания и управления полетом по каналам связи через блоки 11, 12 центрального устройства 10 управления и обработки информации и блоки 9 БРЛС 1 и БРЛС 2 на борт летательных аппаратов передаются команды экипажу (или навигационному устройству) для формирования траектории полета на заданной высоте и заданном расстоянии между ЛА.
На основании команд, поступающих по каналам связи в блоки 8 задания режима работы БРЛС, производится формирование параметров режима, а именно: максимальной и минимальной дальности наблюдения за зоной, требуемому разрешению по азимуту и дальности. Рассчитывается необходимое расстояние d между ЛА в зависимости от этих параметров. Задаются параметры настройки фазированных решеток антенны 3, синхронизатора 6, передающего и приемного устройств 4, 5.
По мере приближения к цели, то есть с уменьшением дальности наблюдения, для поддержания разрешающей способности на требуемом уровне, производится корректировка расстояние d между ЛА.
В диапазоне дальностей от 50000 м до 100000 м достигается разрешающая способность от одного до 50 м. В частности, при разрешающей способности Дr=5-10 м по дальности предельное минимальное расстояние dmin между ЛА, при котором наблюдается повышение точности по азимутальной координате, составляет 240 и 460 метров, соответственно.
Во время полета ЛА двухлучевые антенны 3 облучают обследуемую зону. Как показано на фиг. 2а, передняя зона обзора левого луча основной БРЛС 1, направленного вдоль вектора V1 путевой скорости первого ЛА, перекрывается боковым облучением левого луча дополнительной БРЛС 2, расположенной на втором ЛА на расстоянии d от БРЛС 1. Передняя зона обзора на втором летательном аппарате (фиг. 2б) облучается правым прямым лучом БРЛС 2 и правым боковым лучом основной БРЛС 1. Отраженные от поверхности эхо-сигналы, принятые антеннами 3, поступают в приемное устройство 5, а из них - в устройства 7 обработки и формирования первичного радиолокационного изображения.
По отражениям левого прямого луча основной БРЛС 1, направленного в режиме «реальный луч» в переднюю зону обзора, с высокой разрешающей способностью [2] определяют дальность Dизм обнаруженной цели, а разрешающая способность по углу αизм соизмерима ширине диаграммы направленности (см. фиг. 3а). В это же время, дополнительная БРЛС 2 выполняет переднебоковой обзор (β0>8°), различая цели, как по углу βизм, так и по дальности Rизм. Совмещая информацию между БРЛС 1 и БРЛС 2, получаем возможность различать цели в передней зоне обзора за счет использования дополнительной информации от второй БРЛС, которая и дает возможность обеспечить высокое разрешение по азимутальному углу.
Таким образом, в результате обработки радиолокационных изображений (РЛИ) левых антенн по изображению дополнительной БРЛС 2 вычисляют матрицы данных о целях (например, методом радиолокационного синтезирования апертуры (РСА) антенны) [4, 5] с параметрами: азимут β, дальность R, мощность эхо-сигнала Р2. В то же время, на основной БРЛС 1 в режиме «реальный луч», вычисляют матрицы [1, 2, 4, 5] с параметрами: дальность D и мощность эхо-сигнала Р1. Аналогично, в зоне обзора правых антенн, на дополнительной БРЛС 2 формируются матрицы целей с параметрами дальность и мощность эхо-сигналов, а на РЛИ основной БРЛС 1 - с параметрами азимут, дальность и мощность сигналов наблюдаемых целей. Для простоты изложения дальнейшие этапы обработки РЛИ рассмотрены на примере левых антенн основной и дополнительных БРЛС.
Для дальнейшей обработки вычисленных параметров элементов разрешения на первичных РЛИ, сформированных в устройствах 7 БРЛС 1 и БРЛС 2, они передаются по каналам связи в устройство 13 совместной обработки и формирования итогового РЛИ.
Для обмена информацией между БРЛС в режиме реального времени предварительно определяют и рассчитывают характеристики канала связи между основным и дополнительным летательными аппаратами. В качестве основной характеристики канала связи определяют необходимый объем информации, требуемый для передачи сформированных в устройстве 7 обработки и формирования первичного РЛИ матриц дополнительной БРЛС 2.
После передачи параметров целей на БРЛС 1, необходимо пересчитать координаты положения цели β, R из полярной системы координат (ПСК) БРЛС 2 в ПСК α, D БРЛС 1 по выражениям.

Зная координаты цели α, D, Р в ПСК БРЛС 1 далее определяют, является цель движущейся или нет (см. фиг. 3). Для решения этой задачи можно использовать два критерия.
Первый критерий основан на сравнении измеренной матрицы азимутов βизм на борту дополнительного ЛА и рассчитанной «истинной» матрицы азимутов βист по трем дальностям R, D и d (фиг. 3б). Если азимут цели βист - βизм = 0, то цель классифицируется, как неподвижная (НЦ) (фиг. 3а).
Если условие равенства измеренного и рассчитанного азимутов не выполняется: βист - βизм ≠ 0, то цель следует классифицировать, как движущуюся (ДЦ) (фиг. 3б) и скорректировать ее координаты, выполнив алгоритм пересчета параметров изображения, наблюдаемого дополнительным ЛА, в псевдо-наблюдаемое РЛИ основного ЛА. Критерий применим для случаев, когда цель движется по радиусу (фиг. 4в) и по диагонали (фиг. 4г). В случае если цель движется по окружности в полярной СК БРЛС 2 (фиг. 4б), то рассмотренный критерий, основанный на сравнении азимутальных координат, не пригоден для селекции целей на НЦ и на ДЦ.
Второй критерий, основан на сравнении дальностей Dрасч, рассчитанной по координатам (βизм, d, Rизм) и дальности Dизм, измеренной БРЛС 1. Если дальности цели Dрасч - Dизм = 0 (с точностью до элемента разрешения), то следует классифицировать цель как неподвижную. Если Dpacч - Dизм ≠ 0, то следует классифицировать цель, как ДЦ. Этот критерий можно использовать как совместно с первым критерием, так и отдельно. Когда цель движется вдоль окружности в полярной СК ЛА2 (фиг. 4б) то первый критерий классифицирует цель как НЦ, в то время как второй как ДЦ.
Если в ходе выполнения алгоритма было классифицировано, что цель неподвижная, выполняется алгоритм уточнения положения неподвижных целей в передней зоне обзора БРЛС 1, иначе выполняется алгоритм коррекции положение ДЦ (фиг. 5).
Таким образом, вычислив координаты α, D положения цели и мощность  в БРЛС 2, получают отметку о цели высокого разрешения на РЛИ в передней зоне обзора основной БРЛС 1.
в БРЛС 2, получают отметку о цели высокого разрешения на РЛИ в передней зоне обзора основной БРЛС 1.
Основными преимуществами способа являются: высокая разрешающая способность по координате азимут в передней зоне обзора; определение не радиальной проекции скорости ДЦ, а вектора, то есть направления и модуля скорости; свобода от использования доплеровской фильтрации, что увеличивает помехоустойчивость способа; исключение проблемы синхронизации при разнесении приемника и передатчика на разных носителях.
Промышленная применимость изобретения определяется тем, что предлагаемый способ может быть осуществлен при использовании известных в радиопромышленности и авиаприборостроении средств и использован для картографирования поверхности в передней зоне обзора по курсу движения звена ЛА, несущих бортовые радиолокационные станции, с возможность селекции неподвижных и движущихся целей.
Источники информации
1. Радиолокационные станции обзора Земли / под. ред. Г.С. Кондратенкова. - М.: Радио и связь, 1983. - 272 с.
2. Многофункциональные радиолокационные системы под ред. Б.Г. Татарского, М., ООО «Дрофа», 2007 г., стр. 24, 25, 174-195
3. Способ наблюдения земной поверхности в передней зоне обзора бортовой рлс - патент РФ №2419109 МПК G01S 13/89, опубл. 20.05.2011.
4. Авиационные системы радиовещания: монография / Под ред. Г.С. Кондратенкова. М.: Радиотехника, 2015 г.
5. Верба, B.C. Обнаружение наземных объектов. Радиолокационные системы обнаружения и наведения воздушного базирования / М.: Радиотехника, 2007. - 360 с
6. Способ картографирования земной поверхности бортовой радиолокационной станцией - патент РФ №2423724, МПК G01S 13/89, опубликован 10.07.2011 г.
7. Способ фронтального синтезирования апертуры антенны земной поверхности с исключением слепых зон в передней зоне с помощью многопозиционной радиолокационной системы. - Патент РФ №2560082 на изобретение, МПК G01S 13/90, опубликован 20.08.2015 г., бюл. №23
Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы, основанный на синхронном облучении участка исследуемой поверхности двухлучевыми антеннами с фазированными антенными решетками основной и дополнительной бортовых радиолокационных станций (БРЛС), которые установлены на движущихся параллельными курсами на одной высоте летательных аппаратах (ЛА), отличающийся тем, что левый луч антенны основной БРЛС и правый луч антенны дополнительной БРЛС ориентированы вдоль векторов путевой скорости соответствующих ЛА и облучают переднюю зону обзора, одновременно правым лучом антенны основной БРЛС облучают область переднего обзора правого луча антенны дополнительной БРЛС, левым лучом которой облучают область переднего обзора левого луча антенны основной БРЛС, затем в процессе совместной обработки первичных радиолокационных изображений (РЛИ) основной и дополнительной БРЛС в центральном устройстве управления и обработки информации производят сравнение азимутов целей, вычисленных по значениям дальностей целей на первичных РЛИ и расстояния между БРЛС, и азимутов целей на первичном РЛИ дополнительной БРЛС, если эти значения не совпадают, классифицируют цель как движущуюся и корректируют ее положение, выполняя пересчет параметров изображения, наблюдаемого дополнительной БРЛС, в псевдонаблюдаемое РЛИ основной БРЛС, после чего путем сравнения дальностей целей, полученных в соседних периодах зондирования, определяют вектор скорости движущейся цели, при этом центральное устройство управления и обработки информации содержит блоки обеспечения приема-передачи данных по каналу связи, на которые поступает информация из основной и дополнительной БРЛС, устройство совместной обработки и формирования итогового радиолокационного изображения и блок отображения информации.
Система аэромониторинга залежек морских животных
Моноимпульсный пеленгатор с комбинированным антенным устройством
Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром
Моделирующий комплекс для отладки системы управления автономным подвижным объектом
Моноимпульсная радиолокационная система
Антенное устройство моноимпульсной радиолокационной системы
Способ фронтального синтезирования апертуры антенны земной поверхности с исключением слепых зон в передней зоне с помощью многопозиционной радиолокационной системы
Автономный адаптивно шагающий робот для диагностики газопроводов
Пассивная антиколлизионная радиочастотная идентификационная метка на поверхностных акустических волнах с частотно-временным кодовым различием
Способ антиколлизионной радиочастотной идентификации на поверхностных акустических волнах и система для его осуществления
Пассивный антиколлизионный датчик температуры на поверхностных акустических волнах с частотно-временным кодовым отличием
Моноимпульсная радиолокационная система
Система обнаружения радиолокационных сигналов
Радиолокационная станция
Моноимпульсная радиолокационная система обнаружения и самонаведения
Моноимпульсная радиолокационная система

