Результат интеллектуальной деятельности: ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ МЕСТНОСТИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ)
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это изобретение относится к автоматическим указаниям для пользователя, соответствующим режимам транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Более новые транспортные средства включают в себя множество режимов (см. US 7162346B1, US2015210290A1, GB 2534174A), в том числе, режимы для различных видов местности. Режимы для различных видов местности связаны с разными настройками транспортного средства. Первая настройка может настраивать подвеску, двигатель и/или рулевое управление с первыми параметрами. Вторая настройка может настраивать подвеску, двигатель и/или рулевое управление со вторыми параметрами.
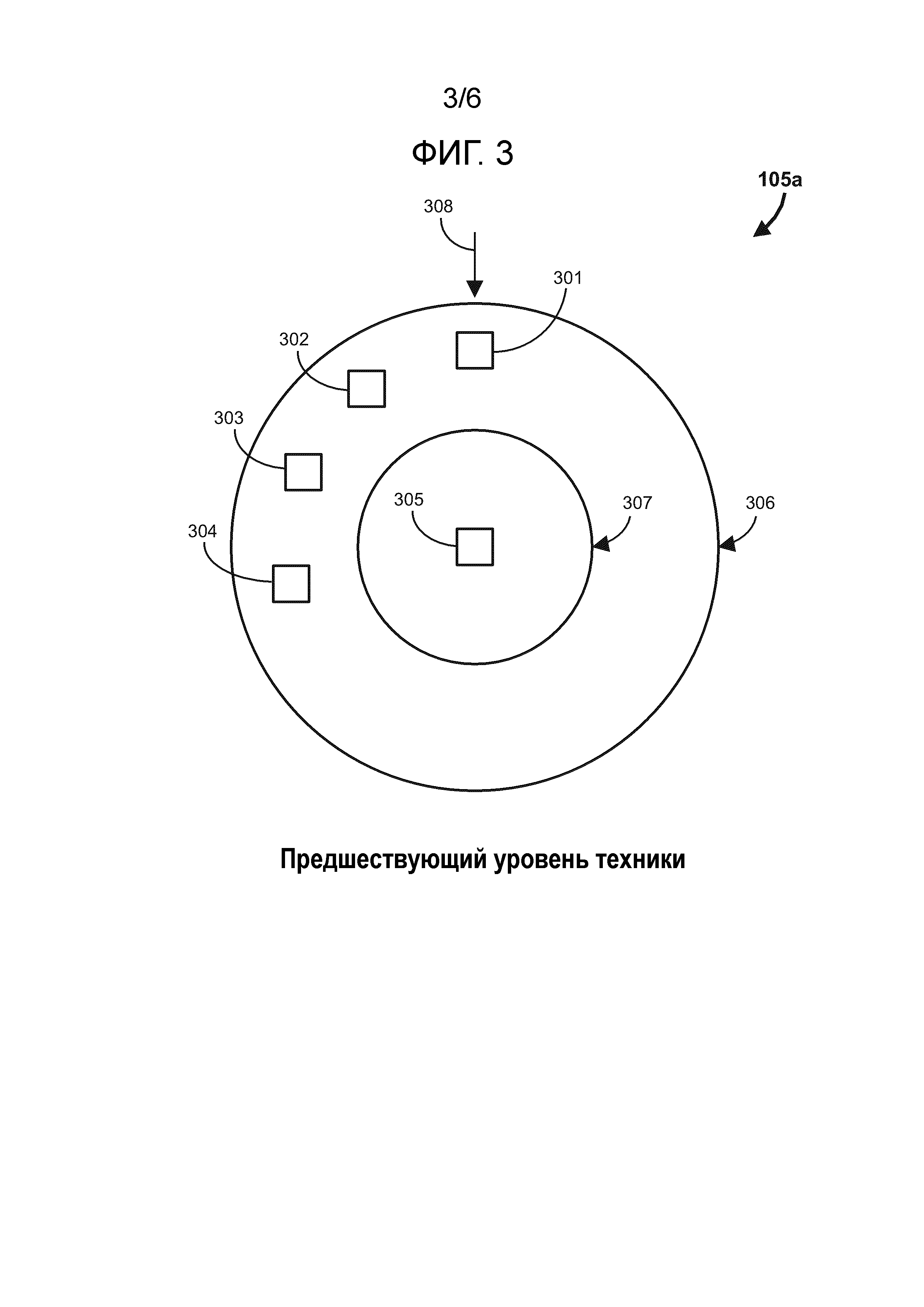
Обращаясь к фиг. 3, переключатель 105а режима местности расположен в транспортном средстве. Переключатель 105а режима местности включает в себя множество режимов 301 - 305. Режимы 301 - 304 являются взаимоисключающими, так что пользователь может выбрать только один из режимов 301 - 304. Режим 305 является дополнительным и может комбинироваться с любым из режимов 301 - 304.
Режимы 301 - 304 представлены в качестве графических изображений на поворотном колёсике 306. Пользователь поворачивает колёсико 306 до тех пор, пока требуемый режим (например, режим 301) не совместится с графическим изображением 308 стрелки. Транспортное средство вводится в действие или внутренне настраивается в соответствии с режимом по графическому изображению 308 стрелки. Режим 305 графического представления расположен на нажимной и полупрозрачной кнопке 307. Когда режим 305 действует, графическое изображение, связанное с режимом 305 светится. Когда режим 305 не действует, графическое изображение лишено освещения. Пользователь вводит в действие и выводит из работы режим 305, нажимая кнопку 307.
Первый режим 301 является режимом движения по траве/гравию/снегу. В то время как в первом режиме 301, транспортное средство выполняет ранние переключения на повышенную передачу, уменьшает выработку крутящего момента при любом заданном положении дросселя и/или повышает крутящий момент привода на все колеса.
Второй режим 302 является режимом движения по песку. В то время как во втором режиме 302, транспортное средство задерживает переключения на повышенную передачу, увеличивает выработку крутящего момента при любом заданном положении дросселя, повышает крутящий момент привода на все колеса и/или минимизирует взаимодействия с системой устойчивости.
Третий режим 303 является режимом движения по грязи или колеям. В то время как в третьем режиме 303, транспортное средство сохраняет пониженные передачи на спуске, повышает крутящий момент привода на все колеса и/или отдает предпочтение тяговому усилию над характеристикой управляемости. Согласно некоторым вариантам осуществления, второй режим 302 и третий режим 303 дают в результате одинаковую настройку.
Четвертый режим 304 является нормальным режимом. Описание первого, второго, третьего и пятого режимов применяет четвертый режим 304 в качестве отправной точки. Следует принимать во внимание, что первый, второй, третий и четвертый режим 304 воздействуют на одно или более из: выработку крутящего момента в ответ на заданное положение дросселя, переключения передач трансмиссии и реакции на рулевом колесе.
Пятый режим 305 является контролируемым спуском с горы. В то время как в пятом режиме 305, транспортное средство справляется со спуском, поддерживая заданную или предварительно рассчитанную целевую скорость. Транспортное средство поддерживает целевую скорость оставаясь на пониженной передаче и автоматически притормаживая.
Переключатель 105а режима местности преподносит проблемы. Пользователи могут неправильно предполагать, что переключатель 105а режима местности вводит в действие или выводит из работы привод на все колеса. Пользователи могут забывать различные настройки, связанные с каждым из режимов 301 - 305 и, таким образом, выбирают неправильный режим для текущих условий вождения. Необходимо решение для устранения этих проблем.
Раскрытие изобретения
Пример транспортного средства, совместимого с настоящим изобретением, включает в себя: двигатель, датчики, рулевое управление, подвеску, переключатель режима местности, процессор(ы), выполненный(е) с возможностью: реализации выбранного режима местности путём настройки по меньшей мере одного из двигателя, рулевого управления и подвески; регистрации выбранных режимов местности; вычисления показателя уверенности на основании зарегистрированных вариантов выбора; определения дорожных условий на основании датчиков; отображения указаний на основании показателя уверенности и дорожных условий.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен с возможностью не вычислять показатель уверенности на основании вариантов выбора, зарегистрированных вне расчетного временного интервала.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен(ы) с возможностью: помещения зарегистрированных вариантов выбора в первую и вторую группы; причём первая группа включает в себя только варианты выбора, зарегистрированные в течение первого временного интервала, причём вторая группа включает в себя только варианты выбора, зарегистрированные за второй временной интервал.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен(ы) с возможностью: вычисления показателя уверенности на основании первой и второй групп зарегистрированных вариантов выбора, и при этом второй временной интервал является большим, чем первый временной интервал.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен(ы) с возможностью: назначения большего веса первой группе и меньшего веса второй группе при вычислении показателя уверенности.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен(ы) с возможностью: не учитывать режимы местности, выбранные в течение промежутка между вычислением показателя уверенности и отображением указаний во время будущих вычислений показателя уверенности.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен(ы) с возможностью: вычисления показателя уверенности, когда измеренная скорость транспортного средства превышает заданную скорость.
Согласно некоторым вариантам осуществления, в которых переключатель режима местности обеспечивает возможность пользовательского выбора одного из множества режимов местности, причём каждый из режимов местности связан с разной настройкой подвески.
Согласно некоторым вариантам осуществления, каждый из множества режимов местности отображается в соответственную заданную скорость, и процессор(ы) выполнен(ы) с возможностью: вычисления показателя уверенности, когда измеренная скорость транспортного средства превышает соответственную заданную скорость выбранного режима местности.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен(ы) с возможностью: определения дорожных условий на основании измеренной угловой скорости рыскания и измеренного угла поворота рулевого управления.
Пример способа управления транспортным средством, совместимого с настоящим изобретением, включает в себя, в транспортном средстве, включающем в себя: двигатель, датчики, рулевое управление, подвеску, переключатель режима местности и процессоры; посредством процессоров: реализацию выбранного режима местности посредством настройки по меньшей мере одного из двигателя, рулевого управления и подвески; регистрацию выбранных режимов местности; вычисление показателя уверенности на основании зарегистрированных вариантов выбора; определение дорожных условий на основании датчиков; отображение указаний на основании показателя уверенности и дорожных условий.
Согласно некоторым вариантам осуществления, способ включает в себя: отсутствие вычисления показателя уверенности на основании вариантов выбора, зарегистрированных вне расчетного временного интервала.
Согласно некоторым вариантам осуществления, способ включает в себя: размещение зарегистрированных вариантов выбора в первую и вторую группу; первая группа включает в себя только варианты выбора, зарегистрированные в течение первого временного интервала, вторая группа включает в себя только варианты выбора, зарегистрированные за второй временной интервал.
Согласно некоторым вариантам осуществления, способ включает в себя: вычисление показателя уверенности на основании первой и второй группы зарегистрированных вариантов выбора, при этом второй временной интервал является большим, чем первый временной интервал.
Согласно некоторым вариантам осуществления, способ включает в себя: назначение большего веса первой группе и меньшего веса второй группе при вычислении показателя уверенности.
Согласно некоторым вариантам осуществления, способ включает в себя: отсутствие учета режимов местности, выбранных в течение промежутка между вычислением показателя уверенности и отображением указаний во время будущих вычислений показателя уверенности.
Согласно некоторым вариантам осуществления, способ включает в себя: вычисление показателя уверенности, когда измеренная скорость транспортного средства превышает заданную скорость.
Согласно некоторым вариантам осуществления, способ включает в себя: переключатель режима местности, дающий возможность пользовательского выбора одного из множества режимов местности, каждый из режимов местности связан с разной настройкой подвески, рулевого управления или двигателя.
Согласно некоторым вариантам осуществления, способ включает в себя: отображение каждого из множества режимов местности в соответственную заданную скорость, и способ включает в себя: вычисление показателя уверенности, когда измеренная скорость транспортного средства превышает соответственную заданную скорость выбранного режима местности.
Согласно некоторым вариантам осуществления, способ включает в себя: определение дорожных условий на основании измеренной угловой скорости рыскания и измеренного угла поворота рулевого управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения можно обратиться к вариантам осуществления, показанным на нижеследующих чертежах. Компоненты на чертежах не обязательно показаны в масштабе, и связанные элементы могут быть пропущены или, в некоторых случаях, могут быть преувеличены пропорции, чтобы подчеркнуть и ясно проиллюстрировать новые признаки, описанные в материалах настоящей заявки. Кроме того, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые номера ссылочных позиций обозначают соответствующие части на всех из нескольких видов.
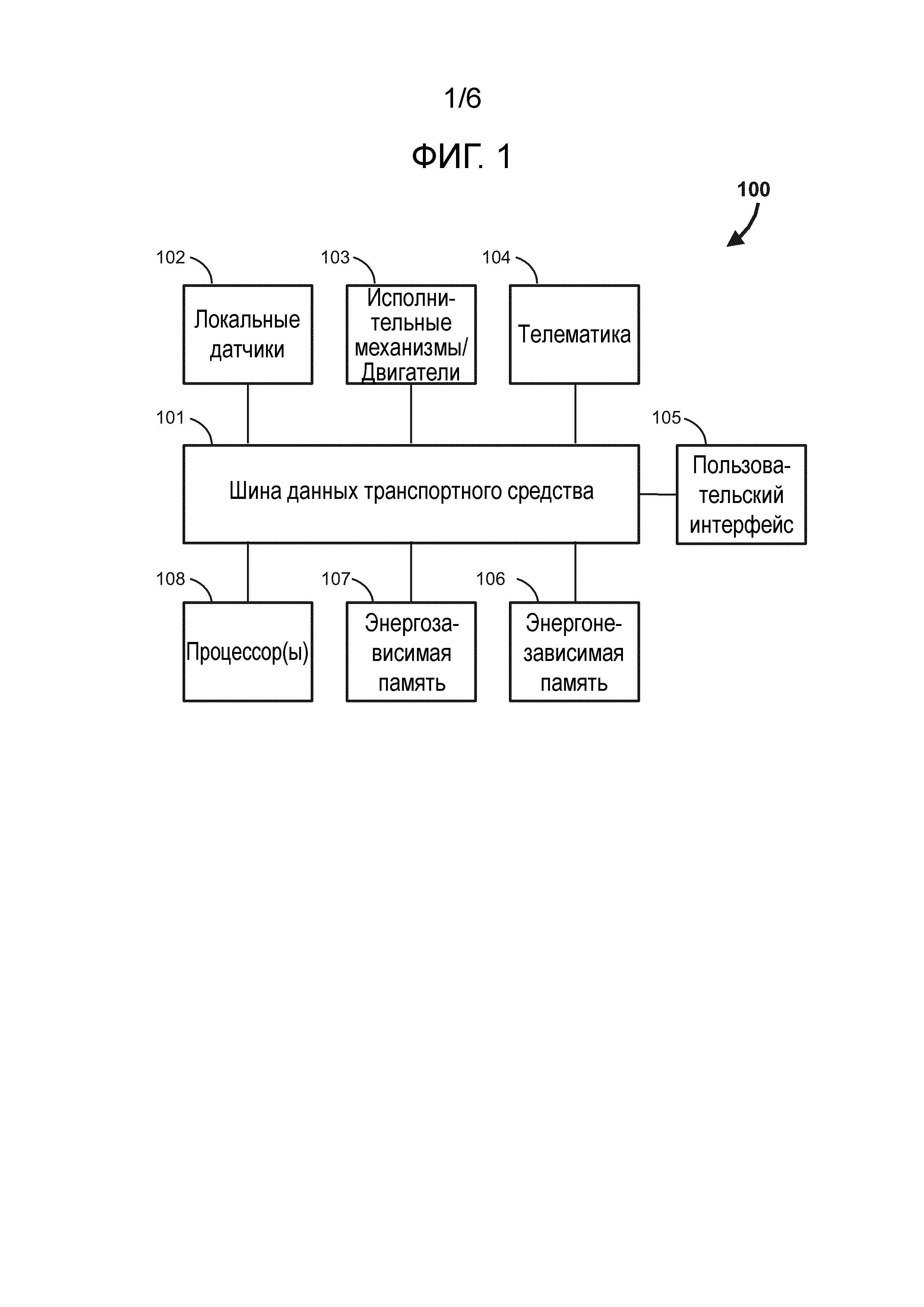
Фиг. 1 - структурная схема вычислительной системы транспортного средства.
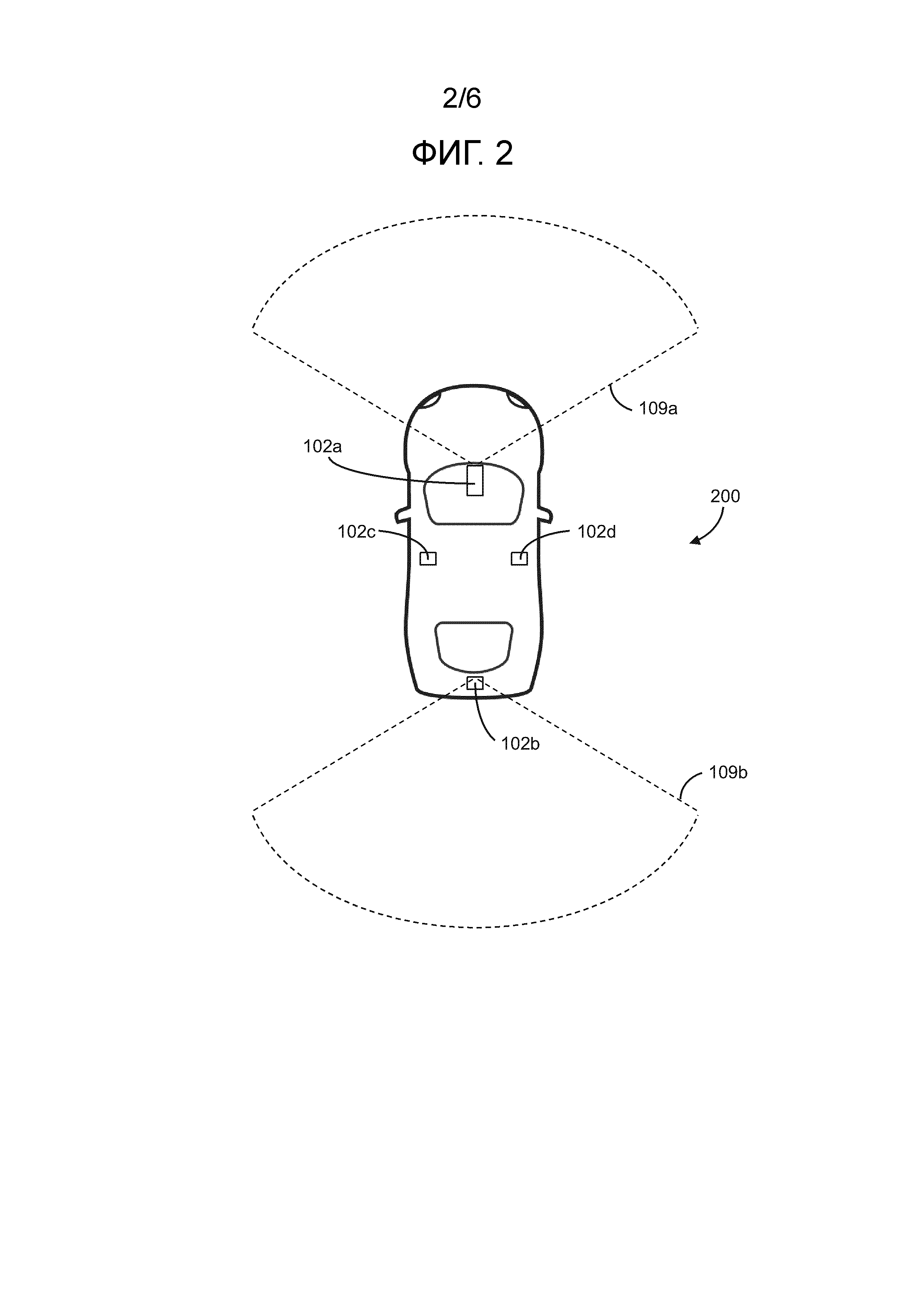
Фиг. 2 - вид сверху транспортного средства, включающего в себя вычислительную систему транспортного средства.
Фиг. 3 - схема примерного переключателя режима местности.
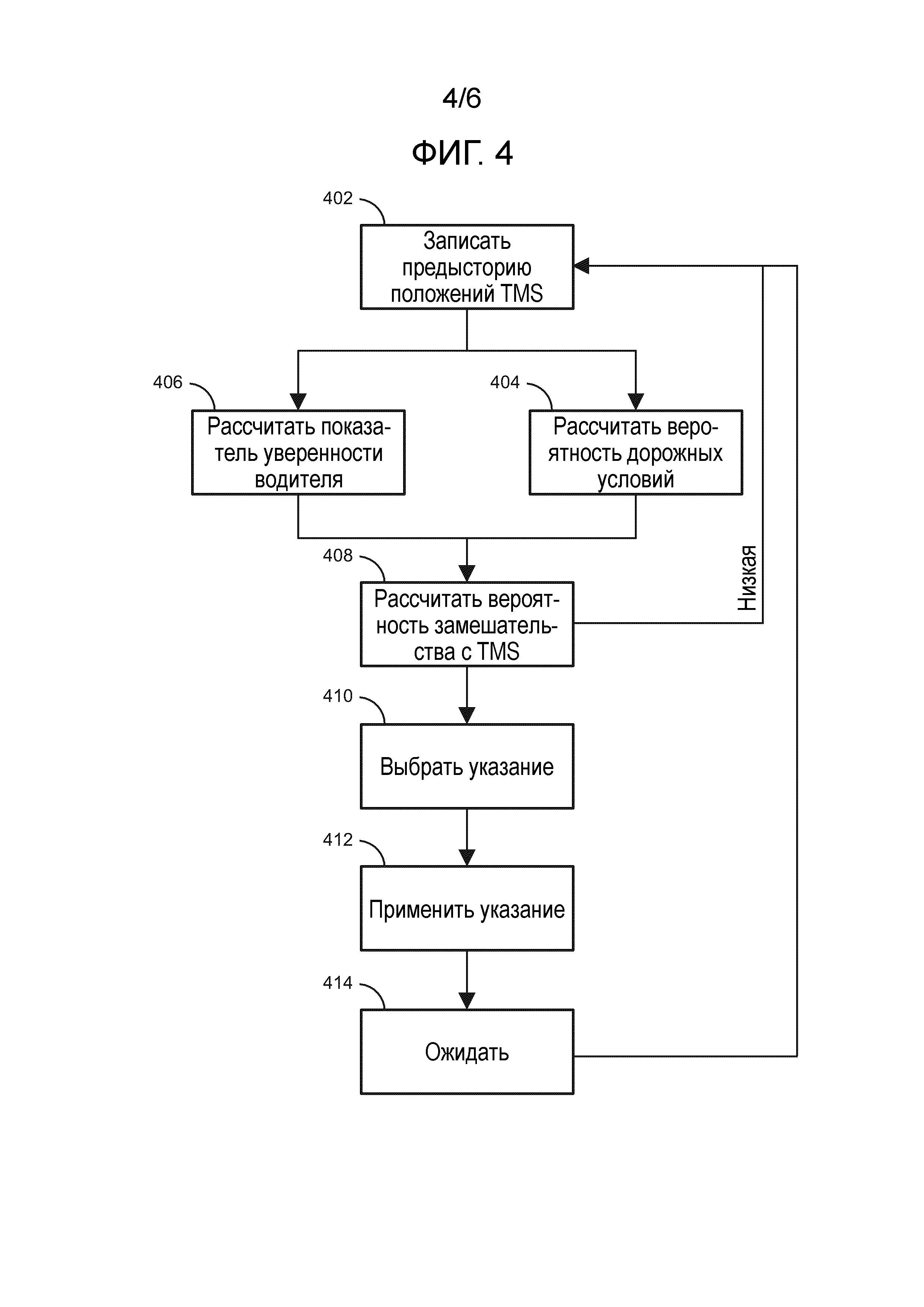
Фиг. 4 - структурная схема способа выбора и применения указаний.
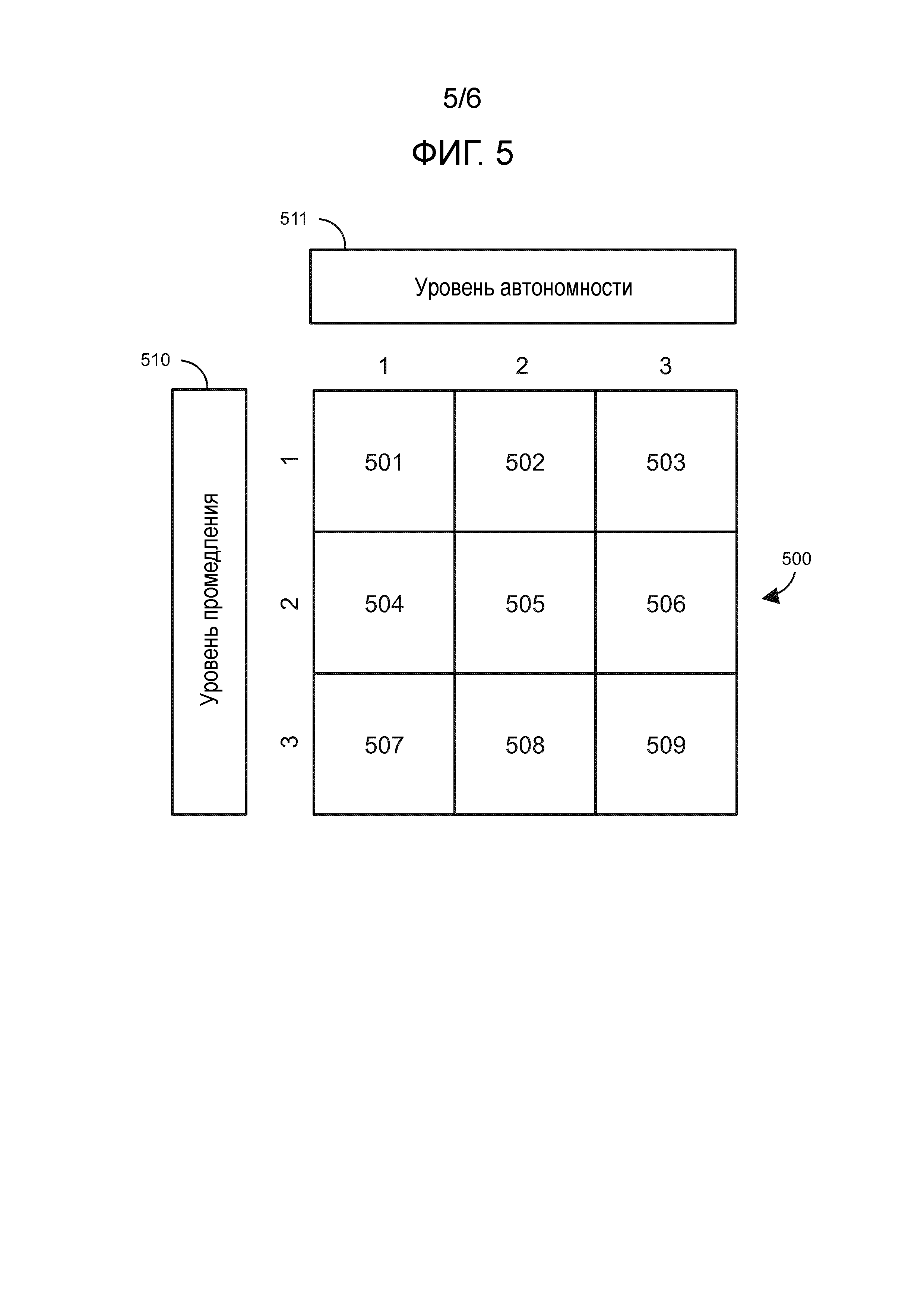
Фиг. 5 - справочная таблица.
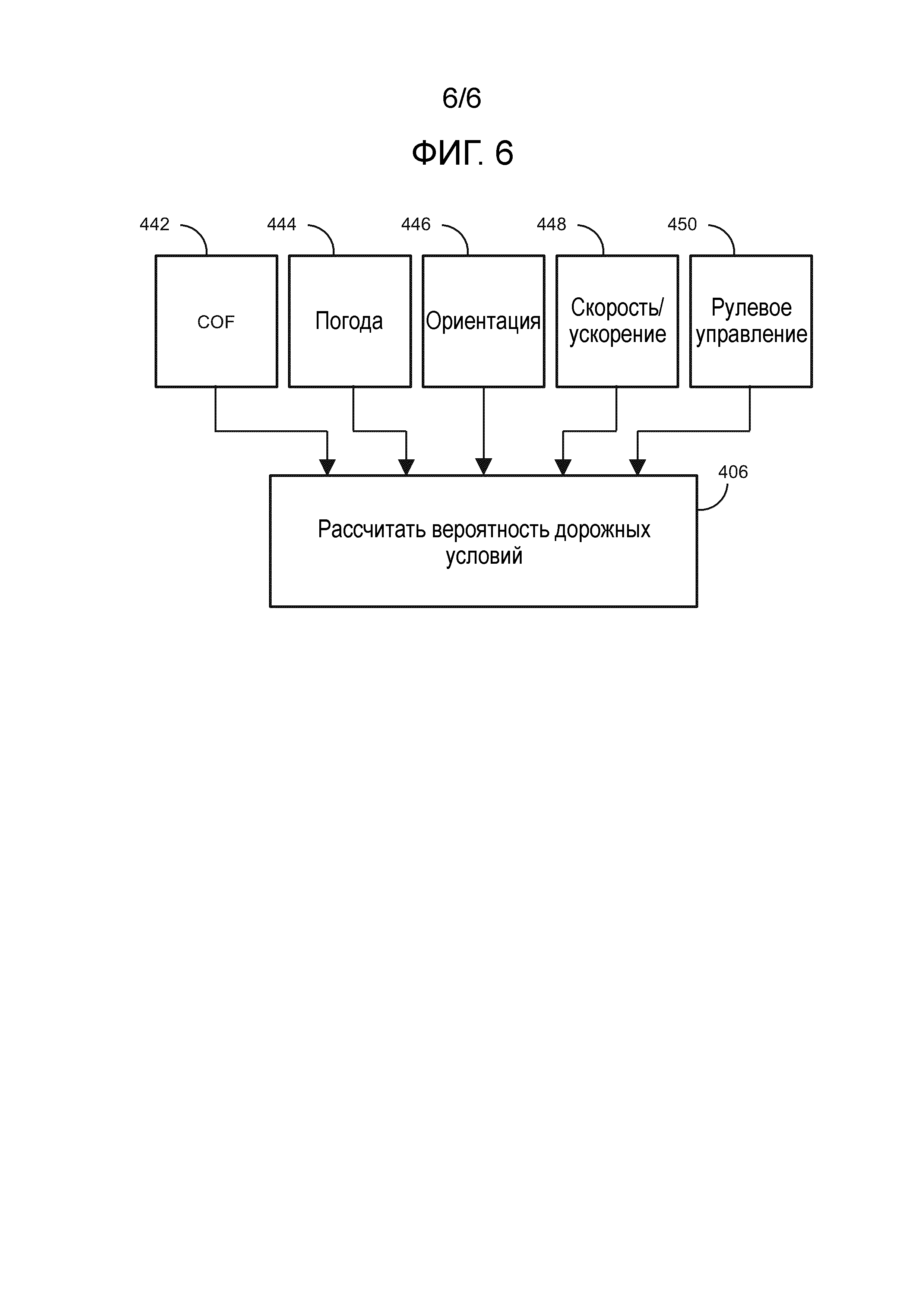
Фиг. 6 - структурная схема расчета вероятности дорожных условий.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
При том, что изобретение может быть реализовано в различных формах, на чертежах показаны и будут ниже описаны некоторые примерные и неограничивающие варианты осуществления с пониманием того, что настоящее описание должно считаться иллюстративным примером изобретения и не подразумевается, что оно должно ограничивать изобретение проиллюстрированным конкретным вариантом осуществления.
В настоящей заявке подразумевается, что использование разделительных союзов включает в себя соединительные союзы. Использование форм единственного числа не подразумевает указание на количество элементов. В частности, подразумевается, что упоминание объекта в единственном числе также может обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться, в качестве одного из возможных вариантов, для выражения признаков, которые присутствуют одновременно и, в качестве другого возможного варианта, взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать как включающий в себя «и/или» в качестве одного из возможных вариантов и «любой из/или» в качестве другого возможного варианта. Согласно некоторым вариантам осуществления, некоторые или все из сравнительных терминов (например, больше, меньше) относятся к сравнениям величин некоторых или всех из объектов под действием сравнения. Согласно некоторым вариантам осуществления, ускорение включает в себя замедление.
Фиг. 1 показывает вычислительную систему 100 первого или базового транспортного средства 200. Первое транспортное средство 200 может быть автономным, полуавтономным или традиционным/с ручным управлением. Первое транспортное средство 200 включает в себя двигатель, аккумуляторную батарею, по меньшей мере одно колесо, приводимое в движение двигателем, и систему рулевого управления, выполненную с возможностью поворота по меньшей мере одного колеса вокруг оси. Первое транспортное средство 200 может быть с силовым приводом на ископаемом топливе (например, дизельном топливе, бензине, природном газе), с гибридным электрическим, с полностью электрическим, силовым приводом от топливных элементов, и т. д.
Транспортные средства, например, описаны в заявке на выдачу патента США № 14/991,496 Miller и др. (“Miller”), патенте США № 8,180,547 Prasad и др. (“Prasad”), заявке на выдачу патента США № 15/186,850 Lavoie и др. (“Lavoie”) и заявке на выдачу патента США № 14/972,761 Hu и др. (“Hu”), все из которых настоящим включены в данный документ путём ссылки в полном объёме. Первое транспортное средство 200 может включать в себя любые из признаков, описанных в источниках Miller, Prasad, Lavoie и Hu.
Вычислительная система 100 находится в первом транспортном средстве 200. Вычислительная система 100, среди прочего, обеспечивает возможность автоматического управления механическими системами в первом транспортном средстве 200 и содействует обмену информацией между первым транспортным средством 200 и внешними объектами (например, инфраструктурой 301 с возможностями связи, сетью Интернет, другими транспортными средствами 201 с возможностями связи). Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательский интерфейс 105, телематический блок 104, исполнительные механизмы и двигатели 103, и локальные датчики 102.
Шина 101 данных транспортирует электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными, чтобы вырабатывать модифицированные электронные сигналы или данные. Энергозависимая память 107 хранит данные для почти незамедлительной выборки процессором 108. Энергонезависимая память 106 хранит данные для выборки в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя диапазон энергонезависимых устройств памяти, в том числе, накопитель на жестких дисках, SSD (твердотельные диски), DVD (цифровые многофункциональные диски), Blu-Ray, и т. д. Пользовательский интерфейс 105 включает в себя устройства отображения, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые дают возможность взаимодействия пользователя с вычислительной системой. Пользовательский интерфейс 105 включает в себя переключатель 105а. Телематический блок 104 обеспечивает возможность как проводной, так и беспроводной связи с внешними объектами через Bluetooth, сотовую систему передачи данных (например, 3G, LTE), USB, и т. д.
Исполнительные механизмы/двигатели 103 создают ощутимые результаты. Примеры исполнительных механизмов/двигателей 103 включают в себя топливные форсунки, стеклоочистители, цепи тормозных фонарей, трансмиссии, подушки безопасности, двигатели, двигатели силовой передачи, рулевое управление, и т. д. Локальные датчики 102 передают цифровые показания или измерения в процессоры 108. Примеры локальных датчиков 102 включают в себя датчики температуры, датчики угла поворота, датчики ремня безопасности, датчики скорости, камеры, лидарные датчики, радарные датчики, инфракрасные датчики, ультразвуковые датчики, и т. д. Следует принимать во внимание, что любые из различных электронных компонентов по фиг. 1 могут включать в себя отдельные или специализированные процессоры и память. Дополнительные подробности о конструкции и операциях вычислительной системы 100, например, описаны в источниках Miller, Prasad, Lavoie и Hu.
Фиг. 2 в целом показывает и иллюстрирует первое транспортное средство 200, которое включает в себя вычислительную систему 100. Некоторые из локальных датчиков 102 установлены на внешней стороне первого транспортного средства 200 (другие расположены внутри транспортного средства 200). Локальный датчик 102a может быть выполнен с возможностью обнаружения объектов, движущихся впереди транспортного средства 200. Локальный датчик 102b выполнен с возможностью обнаружения объектов, движущихся сзади транспортного средства 200, как указано задней областью 109b распознавания. Левый датчик 102c и правый датчик 102d выполнены с возможностью выполнения сходных функций для левой и правой сторон транспортного средства 200.
Как описано выше, локальные датчики с 102а по 102d могут быть ультразвуковыми датчиками, лидарными датчиками, радарными датчиками, инфракрасными датчиками, камерами, микрофонами и любыми их комбинациями, и т. д. Первое транспортное средство 200 включает в себя ведущий узел других локальных датчиков 102, расположенных во внутренней области транспортного средства или на внешней стороне транспортного средства. Локальные датчики 102 могут включать в себя какие-нибудь или все из датчиков, раскрытых в источниках Miller, Prasad, Lavoie и Hu.
Следует принимать во внимание, что первое транспортное средство 200 выполнено с возможностью выполнения способов и операций, описанных в материалах настоящей заявки. В некоторых случаях, первое транспортное средство 200 выполнено с возможностью выполнения этих функций с помощью компьютерных программ, хранимых на энергозависимых 107 и/или энергонезависимых 106 устройствах памяти вычислительной системы 100.
Процессор выполнен с возможностью выполнения раскрытого этапа или блока способа по меньшей мере когда процессор находится на оперативной связи с памятью, хранящей программно реализованную программу с управляющей программой или командами, реализующими раскрытый этап или блок способа. Дополнительное описание того, каким образом совместно действуют процессоры, устройство памяти и программное обеспечение, приведено в источнике Prasad. Согласно некоторым вариантам осуществления, мобильный телефон или внешний сервер на оперативной связи с первым транспортным средством 200 выполняют некоторые или все из способов и операций, описанных ниже.
Согласно различным вариантам осуществления, первое транспортное средство 200 включает в себя некоторые или все из признаков транспортного средства 100a по источнику Prasad. Согласно различным вариантам осуществления, вычислительной система 100 включает в себя некоторые или все из признаков VCCS 102 с фиг. 2 по источнику Prasad. Согласно различным вариантам осуществления, первое транспортное средство 200 находится на связи с некоторыми или всеми из устройств, показанных на фиг. 1 по источнику Prasad, в том числе, переносным устройством 110, связной вышкой 116, телекоммуникационной сетью 118, сетью 120 Интернет и центром 122 обработки данных.
Термин «снаряженное транспортное средство», используемый в формуле изобретения, настоящим определен в значении: «транспортное средство, включающее в себя: двигатель, множество колес, источник питания и систему рулевого управления; при этом двигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым приводя в движение по меньшей мере одно из множества колес; при этом источник питания подает энергию на двигатель; и при этом система рулевого управления выполнена с возможностью управления направлением по меньшей мере одного из множества колес». Термин «оборудованное транспортное средство», используемый в формуле изобретения, настоящим определен в значении «транспортное средство, включающее в себя: аккумуляторную батарею, множество колес, двигатель, систему рулевого управления; при этом двигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом аккумуляторная батарея является перезаряжаемой и выполнена с возможностью подачи электроэнергии на двигатель, тем самым возбуждая двигатель; и при этом система рулевого управления выполнена с возможностью управления направлением по меньшей мере одного из множества колес».
Первое транспортное средство 200 включает в себя переключатель 105а режимов местности. Первое транспортное средство 200, таким образом, выполнено с возможностью самонастройки согласно выбранному пользователем режиму 301 - 305 переключателя 105а местности. Хотя раздел уровня техники изобретения перечисляет настройку, связанную с каждым режимом 301 - 305, следует принимать во внимание, что по желанию режимы 301 - 305 могут быть заменены или перепрограммированы. Могут быть добавлены дополнительные режимы. Конструкция переключателя 105а режима особенностей местности является всего лишь одним из примеров переключателя 105а режима особенностей местности. Другими словами, настоящее изобретение предполагает, что переключатель 105а режима местности может быть устроен любым пригодным образом. Например, переключатель 105а режима местности может включать в себя множество дискретных переключателей режима местности.
Обращаясь на фиг. 4 - 7, первое транспортное средство 200 выполнено с возможностью уведомления пользователя в отношении переключателя 105а режима местности. Точнее, первое транспортное средство 200 выполнено с возможностью обнаружения, оценки, приближенного выражения или определения, когда пользователь испытывает замешательство относительно переключателя 105а режима местности и выполнять одно или более решений для устранения замешательства пользователя.
Обращаясь к фиг. 4, первое транспортное средство 200 записывает предысторию переключателя 105а режима местности (TMS) на блоке 402. На блоке 404 первое транспортное средство рассчитывает вероятность дорожных условий. На блоке 406 первое транспортное средство 200 вычисляет показатель уверенности водителя на основании по меньшей мере части записанной предыстории положений TMS. На блоке 408 первое транспортное средство 200 рассчитывает вероятность замешательства с TMS на основании (а) рассчитанного показателя уверенности водителя и (b) рассчитанной вероятности дорожных условий. На блоке 410 первое транспортное средство 200 выбирает указания на основании рассчитанной вероятности замешательства с TMS и сравнения. На блоке 412 первое транспортное средство 200 применяет выбранное указание. На блоке 414 первое транспортное средство 200 ожидает заданное время, а затем возвращается к блоку 402.
Что касается блока 402, первое транспортное средство 200 регистрирует и сохраняет заданное количество самых последних положений TMS. Первое транспортное средство 200 записывает и сохраняет новейшие положения TMS, когда пользователь приводит в действие TMS 105а. Первое транспортное средство 200, кроме того, регистрирует и сохраняет новейшее положение TMS, всякий раз, когда первое транспортное средство 200 выбирает режим TMS по поручению пользователя. Например, первое транспортное средство 200 может быть выполнено с возможностью автоматического вхождения в четвертый режим 304 в начале нового цикла ключа зажигания. Такой автоматический вход улучшает экономию топлива, снижая вероятность того, что пользователь неосознанно ведёт первое транспортное средство 200 несмотря на действующие режимы 301 - 303 и 305. Таким образом, следует принимать во внимание, что режим местности, действующий в первом транспортном средстве 200, не обязательно является режимом местности, расположенным под графическим изображением 308 стрелки, при условии, что первое транспортное средство 200 может выбирать режим по поручению пользователя. Согласно различным вариантам осуществления, первое транспортное средство 200 не регистрирует, или не регистрируют по отдельности, положения TMS, возникающие во время блоков 404, 406, 408, 410, 412, и 414. Когда первое транспортное средство 200 регистрирует положения TMS по отдельности, первое транспортное средство 200 может не учитывать отдельно зарегистрированные положения TMS во время будущих повторений способа, показанного на фиг. 4.
На основании обнаруженного наличия запускающего условия первое транспортное средство 200 выполняет блоки 404 и 406. Запускающие условия могут включать в себя одно или более из: (а) заданного количества новых положений режима местности в течение первого заданного промежутка времени; (b) истечения второго заданного промежутка времени, так что блоки 404 и 406 выполняются периодически, не опираясь на записанную предысторию положений TMS; (с) вхождения в режим TMS при ненадлежащих или непредвиденных скорости или ускорении. Каждый режим 301 - 305 TMS связан со скоростью или ускорением для входа (например, первый режим 301 связан с первыми скоростью или ускорением для входа, второй режим 302 связан со вторыми скоростью или ускорением для входа, и т. д.). Если первое транспортное средство 200 входит в один из режимов 301 - 305 TMS на скорости или ускорении, превышающих связанные скорость или ускорение для входа, то присутствует запускающее условие (с).
На блоке 404 первое транспортное средство 200 рассчитывает вероятность дорожных условий. Обращаясь к фиг. 6, вероятность дорожных условий основана на (а) одном или более коэффициентов трения поверхности, обнаруженных на блоке 442, (b) погодных условиях, обнаруженных на блоке 444, (с) ориентации (например, трехмерном направлении движения) первого транспортного средства 200, обнаруженной на блоке 446, (d) скорости и/или ускорении первого транспортного средства 200, обнаруженных на блоке 448, (d) положении рулевого управления или угла поворота рулевого управления первого транспортного средства 200, обнаруженного на блоке 450.
Обнаружение коэффициентов трения поверхности общеизвестно в данной области техники и, например, описано в патенте США № 6,866,349 Sauter, патенте США № 8,180,547 Prasad, в заявке на выдачу патента США № 15/183,355 Bidner, все из которых настоящим включены в данный документ путём ссылки в полном объёме. Обнаружение коэффициентов трения поверхности выполняется локальными датчиками 102 или принимается с внешнего сервера карт на основании текущего местоположения первого транспортного средства 200. Обнаружение погоды может выполняться с помощью локальных датчиков 102 (например, датчиков влажности, датчиков дождя, датчиков температуры, и т. д.) или может приниматься с внешнего сервера погоды. Обнаружение ориентации выполняется одним или более гироскопов или измерителей ускорения (то есть локальных датчиков 102). Ориентация включает в себя трехмерную ориентацию первого транспортного средства 200. Обнаружение скорости/ускорения и рулевого управления выполняется локальными датчиками 102.
На блоке 406 первое транспортное средство 200 рассчитывает вероятность дорожных условий на основании одного или более из блоков 442, 444, 446, 448 и 450.
Первое транспортное средство 200 может определять, что уместен первый режим 301 движения по траве/гравию/снегу является (то есть первое транспортное средство 200 движется по траве/гравию/снегу), когда: (а) обнаруженный коэффициент трения находится ниже первого заданного коэффициента трения, (b) угловая скорость рыскания по ее изменению (то есть скорости изменения угла рыскания) или величине превышает первую заданную скорость изменения угла рыскания, первая заданная скорость изменения угла рыскания выбирается или рассчитывается на основании обнаруженного угла поворота рулевого управления и одного или обоих из (i) одного или обоих из обнаруженной скорости и обнаруженного ускорения первого транспортного средства 200, (ii) одного или обоих из обнаруженной скорости и обнаруженного ускорения одного или более колес первого транспортного средства 200 (то есть скорости вращения колес или ускорения вращения колес), (c) обнаруженное изменение ускорения и/или скорости или их величина является меньшей, чем заданное изменение ускорения и/или скорости или их величины, заданное изменение рассчитывается на основании изменения положения дросселя (например, акселератора) и/или обнаруженного коэффициента трения.
Согласно некоторым вариантам осуществления, первое транспортное средство 200 назначает вероятность, что режим 301 уместен. Вероятность основана на (а) величине каждого из вышеупомянутых рассчетов, определений или обнаружений, превышающей соответственные целевые заданные пороговые значения, и (b) величине каждого из вышеупомянутых рассчетов, определений или обнаружений, падающих ниже соответственных заданных пороговых значений. Согласно различным вариантам осуществления, каждой величине превышения и каждой величине нехватки назначается соответственный заданный вес. Вероятность основана на взвешенных величинах. Превышение находится в положительном соотношении с поверхностью. Нехватка находится в отрицательном соотношении с поверхностью.
В этом примере, второй режим 302 движения по песку и третий режим 303 движения по грязи/колеям побуждает первое транспортное средство 200 выполнять одинаковые функции настройки. Первое транспортное средство 200 может определять, что второй режим 302 движения по песку и/или третий режим 303 движения по грязи/колеям уместен (то есть первое транспортное средство 200 движется по песку и/или грязи/колеям), когда: (а) обнаруженный коэффициент находится выше второго заданного коэффициента трения, второй заданный коэффициент трения может быть равным первому заданному коэффициенту трения, (b) колеса на одной оси (например, два задних колеса) находятся в разных вертикальных положениях, так что величина перепада между левым колесом и соответствующим правым колесом превышает заданное значение, и (с) угловая скорость рыскания по изменению (то есть скорости изменения угла рыскания) падает ниже второй заданной скорости изменения угла рыскания, вторая заданная скорость изменения угла рыскания выбирается или рассчитывается на основании обнаруженного угла поворота рулевого управления или его величины и одного или обоих из (i) одного или обоих из обнаруженной скорости и обнаруженного ускорения или их величины первого транспортного средства 200, (ii) одного или обоих из обнаруженной скорости и обнаруженного ускорения одного или более из колес первого транспортного средства 200 (то есть скорости вращения колес или ускорения колес) или их величин, и (d) обнаруженное изменение ускорения и/или скорости или их величина является большей, чем заданное изменение ускорения и/или скорости, заданное изменение рассчитывается на основании изменения положения дросселя (например, акселератора) и/или обнаруженного коэффициента трения. Первое транспортное средство 200 может рассчитывать изменение угла рыскания, опираясь на ориентацию.
Согласно некоторым вариантам осуществления, первое транспортное средство 200 назначает вероятность того, что уместен режим 302 и/или 303. Вероятность основана на (а) величине каждого из вышеупомянутых расчётов, определений или обнаружений, превышающей соответственные целевые заданные пороговые значения, и (b) величине каждого из вышеупомянутых рассчетов, определений или обнаружений, падающих ниже соответственных заданных пороговых значений. Согласно различным вариантам осуществления, каждой величине превышения и каждой величине нехватки назначается соответственный заданный вес. Вероятность основана на взвешенных величинах. Превышение находится в положительном соотношении с поверхностью. Нехватка находится в отрицательном соотношении с поверхностью.
Первое транспортное средство 200 может определять, что четвертый нормальный режим 304 уместен, когда каждая из вероятностей каждого режима 301, 302 и 303 находится ниже заданного порогового значения вероятности нормального режима.
Первое транспортное средство 200 может определять, что пятый режим 305 контролируемого спуска с горы уместен (то есть первое транспортное средство 200 съезжает вниз по склону), когда вертикальное положение одного или обоих из задних колес превышает вертикальное положение одного или обоих из передних колес на заданное расстояние. В качестве альтернативы, первое транспортное средство 200 может определять, что пятый режим 305 контролируемого спуска с горы уместен, когда ориентация относительно горизонтальной оси выходит за пределы заданной ориентации. Согласно некоторым вариантам осуществления, первое транспортное средство 200 назначает вероятность, что режим 305 уместен, находя величину превышения перепада вертикального положения сверх заданным расстоянием.
На блоке 406 первое транспортное средство 200 рассчитывает показатель уверенности водителя. Показатель уверенности водителя основан на частоте или количестве изменений положения TMS в течение третьего заданного промежутка времени. Третий заданный промежуток времени может быть равным первому заданному промежутку времени. Третий заданный промежуток времени может быть основан на скорости или ускорении первого транспортного средства 200. Согласно некоторым вариантам осуществления, третий заданный промежуток времени обратно зависим от скорости и/или ускорения, так что, по мере того как скорость и/или ускорение возрастают, упомянутый промежуток времени убывает.
Показатель уверенности водителя, кроме того, основан на (а) частоте применяемого указания в течение четвертого промежутка времени, (b) частоте применяемого указания в течение пятого заданного промежутка времени, и (с) идентификационных данных пользователя или водителя (например, которые обнаруживаются посредством технологии распознавания лиц, соединения с мобильным устройством пользователя и/или пользовательским ключом от транспортного средства). Четвертый заданный промежуток времени может быть относительно коротким (например, иметь значение три минуты). Четвертый заданный промежуток времени может начинаться, когда транспортное средство 200 первый раз выдает указания во время текущего цикла ключа зажигания. Пятый заданный промежуток времени может быть относительно длинным (например, накоплением времени всех циклов ключа зажигания идентифицированного пользователя за заранее установленный временной интервал, такой как три месяца) и, таким образом, относиться к общей опытности и знаниям пользователя. По мере того как частота (а) и (b) возрастает, показатель уверенности водителя увеличивается (то есть высокий показатель уверенности водителя указывает высокую вероятность замешательства водителя).
Результаты обоих блоков 404 и 406 являются числовыми значениями. На блоке 408 первое транспортное средство 200 комбинирует числовые значения согласно заданной комбинационной формуле (например, сложению и/или умножению), чтобы давать вероятность или значения замешательства с TMS. Первое транспортное средство 200 может корректировать результат заданной комбинационной формулы предварительно загруженной и выбираемой пользователем постоянной величиной. Неуверенные и неопытные водители выбирают высокую постоянную величину. Уверенные и опытные водители выбирают низкую постоянную величину.
Обращаясь к фиг. 5, транспортное средство 200 включает в себя справочную таблицу 500. Справочная таблица 500 включает в себя множество записей 501 - 509. Каждая запись связана с (а) конкретной вероятностью или значением замешательства с TMS и (b) указанием. Каждая запись категоризируется по (а) уровню 510 промедления и (b) уровню 511 автономности.
Пользователь выбирает максимальный уровень промедления и максимальный уровень автономности. Например, пользователь может выбирать максимальный уровень промедления 2 и максимальный уровень автономности 3. Записи, связанные с невыбранным уровнем категории, не активны. В этом примере активны записи 507 - 509 не. Активны записи, связанные с обоими выбранными уровнями категории. В этом примере, записи с 501 - 506 активны. Первое транспортное средство 200 выбирает одну запись из активных записей согласно рассчитанной вероятности или значению замешательства с TMS. Например, первое транспортное средство 200 может выбирать активную запись, имеющую связанную вероятность или значение уверенности водителя, ближайшие к рассчитанным вероятности или значению замешательства с TMS.
На блоке 412 первое транспортное средство применяет указание, связанное с выбранной активной записью в свете наиболее вероятного режима 301 - 303 с установкой по умолчанию в режим 304, если каждый из режимов 301 - 303 находится ниже заданного порогового значения вероятности нормального режима) и того, уместен ли режим 305 контролируемого спуска с горы. Например, запись 501 может соответствовать подсказке или сообщению на устройстве отображения транспортного средства, информирующей пользователя о надлежащем режиме (термин режим предполагает один или более режимов, когда уместны контролируемый спуск с горы и один из режимов 301 - 304). Запись 504 может соответствовать подсказке или сообщению на устройстве отображения транспортного средства и звуковому сигналу. Запись 507 может соответствовать подсказке или сообщению, гудку и речевой команде. Запись 502 может соответствовать автоматической реализации первым транспортным средством 200 режима, связанного с обнаруженной поверхностью, и отображению подсказки или сообщения. Запись 505 может соответствовать автоматической реализации первым транспортным средством 200 режима, связанного с обнаруженной поверхностью, и отображению подсказки или сообщения и формированию звукового сигнала. Запись 503 может соответствовать автоматической реализации первым транспортным средством 200 режима, связанного с обнаруженной поверхностью, автоматическому управлению ускорением, и подсказке или сообщению.
Таким образом, следует принимать во внимание, что согласно некоторым вариантам осуществления, по мере того как уровень промедления возрастает, все предыдущие действия, связанные с промедлением, выполняются совокупно (например, указание, связанное с записью 707, включает в себя все указания, связанные с записями 704 и 701). Подобным образом, по мере того как возрастает уровень автономности, все предыдущие автономные действия, связанные с автономностью, выполняются совокупно (например, указание, связанное с записью 503, включает в себя все автономные действия, связанное с записями 501 и 502).

Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Повышение эффективности лазерной системы зажигания
Система лазерного нагрева
Способы для лазерного зажигания и измерения
Способ продувки паров топлива (варианты )
Лазерное зажигание и контроль пропусков зажигания
Способ защитной блокировки устройства лазерного зажигания (варианты)
Система и способ дистанционного наблюдения за транспортными средствами
Способ оптимизации расхода топлива в транспортном средстве
Диагностика, основанная на лазерной системе зажигания
Диагностика, основанная на лазерной системе зажигания

