Результат интеллектуальной деятельности: СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано для коллокации (баллистического обеспечения гарантированного сосуществования в одной и той же области околостационарной орбиты (ОСО) по долготе и широте относительно точки стояния) космических аппаратов (КА).
КА на ОСО называются геостационарными КА. В тексте под КА следует понимать геостационарный КА.
1. Коллокацию КА следует проводить по согласованным схемам, известным предприятию. Эти схемы - аналоги сводятся к равноудалению точек прицеливания векторов en [en; (Ω+ω)n] (n=1,2, …) и in [in; Ωn] (n=1,2, …) в соответствующих фазовых плоскостях КА и поддержанию концов векторов en и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом согласованной коллокации считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю или 180°. Для трех КА цифру 180 в отношении точек прицеливания заменяют на 120. Однако за кажущейся простотой схем скрывается сложная и затратная процедура управления векторами коллокации. Коллокация здесь рассматривается как способ управления движением центров масс, гарантирующий от столкновений КА. Эта задача актуальна и удовлетворительно решается для двух КА (даже при нулевых наклонениях) при условиях:

то есть тогда, когда восходящие узлы орбит разнесены на 180°, для каждой из орбит линия узлов совпадает с линией апсид, направления на восходящий узел и перигей одной из орбит совпадают, другой - взаимно противоположны. Гарантированное минимальное межспутниковое расстояние, при реальном эксцентриситете орбит КА порядка 0,00015, составляет 12,6 км.
Центры управления всеми КА, находящимися в единой области удержания по широте и долготе, следуют единой стратегии коллокации, обмениваясь баллистической информацией.
Метод согласованной коллокации является универсальным, то есть независимым от типа КА, участвующих в совместном удержании. В процессе совместного функционирования КА точки прицеливания, а в идеале и текущие векторы наклонения и эксцентриситета орбит КА, должны изменяться синфазно в заданной области удержания относительно рабочей позиции. Благодаря такой стратегии поддержания будет постоянно обеспечиваться наклон между плоскостями орбит, и взаимные расстояния между КА на линиях пересечения их орбитальных плоскостей будут не менее допуска (10 км).
Однако для гарантированной коллокации требуется перманентный процесс обмена баллистической информацией между центрами управления КА. Такой процесс может давать сбои, и сбои обязательно будут происходить. Кроме того, нельзя исключать принципиальную невозможность взаимодействия между центрами управления КА. Проще находиться в состоянии автономной коллокации (самоколлокации): когда к процессу коллокации не привлекаются другие КА и их центры управления. При постановке такой задачи следует учитывать, что линия узлов и линия апсид орбиты смежного КА (СКА) могут пересекаться под произвольным углом. Далее по тексту под КА с самоколлокацией (КАСК) подразумевается КА, «взявший» на себя всю ответственность по коллокации в заданной области удержания по широте и долготе.
Идея автономной коллокации, не накладывающей никаких сколько-нибудь значимых обязательств на центр управления СКА (что означает наличие или отсутствие действий по реализации согласованной стратегии коллокации со стороны такого центра управления), позволяющей за счет настройки векторов наклонения и эксцентриситета обходить в течение суток лучи от всех антенн, включая глобальные, на СКА, не создавая тем самым экранирующих эффектов, представляется актуальной и наиболее эффективной.
2. Известен способ автономной коллокации на геостационарной орбите (ГСО) (RU 2559371 С2). Согласно данному способу, включающему переводы векторов наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания (областей допустимого изменения векторов наклонения и эксцентриситета), измерения параметров орбиты каждого космического аппарата (КА), определение по ним текущих значений орбитальных параметров каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, за время до приведения КА с самоколлокацией (КАСК) в заданную область удержания по широте (наклонению) и долготе по данным независимых траекторных измерений выявляют стратегию управления движением центра масс СКА, в процессе удержания уточняют положение центра области прицеливания по наклонению СКА, проведением коррекций наклонения вектор наклонения орбиты КАСК в фазовой плоскости с учетом сезона (текущего прямого восхождения Солнца) выставляют так, чтобы линия узлов орбиты КАСК стала перпендикулярна линии узлов орбиты СКА и центр области прицеливания, включающей годограф вектора наклонения орбиты КАСК, смещают по перпендикуляру из начала координатной системы [ix;iy] относительно линии, соединяющей это начало с центром области прицеливания СКА, на величину расстояния между этим центром и началом координатной системы, проводят регулярные коррекции эксцентриситета для удаления направления на перигей от направления на восходящий узел орбиты КАСК на величину угла рассогласования (УР) между направлениями на перигей и восходящий узел орбиты СКА и поддержания такого положения перигея заданных пределах области прицеливания по эксцентриситету, проводят регулярные коррекции наклонения орбиты КАСК, вызывающие, при поддержании прямого угла между линиями узлов орбит КА, следование конца вектора наклонения его годографу, на КАСК переопределяют центры областей прицеливания по наклонению и эксцентриситету орбиты КАСК при корректировке стратегии управления движением центра масс СКА и при нарастании УР КАСК, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы и эксцентриситета орбиты.
3. Известен способ мониторинговой коллокации на геостационарной орбите (RU 2558959 С2). Согласно данному способу, включающему переводы векторов наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания (областей допустимого изменения векторов наклонения и эксцентриситета), измерения параметров орбиты каждого космического аппарата (КА), определение по ним текущих значений орбитальных элементов каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, для организации автономной от СКА коллокации за время до приведения мониторингового КА (МКА) в заданную область удержания по широте (наклонению) и долготе по данным независимых траекторных измерений выявляют стратегию управления движением центра масс СКА, в процессе удержания уточняют положение центра области прицеливания по наклонению смежного КА, проведением коррекций наклонения вектор наклонения орбиты МКА в фазовой плоскости выставляют так, чтобы линия узлов орбиты МКА стала перпендикулярна линии узлов орбиты смежного КА и наклонение (imin) орбиты МКА относительно орбиты СКА составляло не менее (14-15) угл.с., проводят коррекции вектора эксцентриситета:
- чтобы сумма эксцентриситетов орбит МКА и СКА составляла порядка 4⋅10-4;
- для удаления направления на перигей от направления на восходящий узел орбиты МКА на величину УР СКА;
- для поддержания такого положения перигея заданных пределах области прицеливания по эксцентриситету,
проводят регулярные комплексные коррекции наклонения орбиты МКА:
- для поддержания прямого угла между линиями узлов орбит КА в заданных пределах области прицеливания по наклонению;
- для устранения вековой составляющей ухода по наклонению;
- для превышения imin,
проводят коррекции долготы (периода) для того, чтобы начало координат [ΔL;ΔR - соответственно отклонение вдоль орбиты и отклонение по радиус-вектору] совпадало в заданных пределах с центром эллипса дистанцирования от СКА, на МКА переопределяют центры областей прицеливания по наклонению и эксцентриситету орбиты МКА при корректировке стратегии управления движением центра масс СКА и при нарастании УР МКА и СКА, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы и эксцентриситета орбиты.
В основу аналога 2 и аналога 3 в части баллистического обеспечения положена концепция:

Баллистические сведения о смежных КА и задачу разнесения векторов наклонения и эксцентриситета в режиме автономной коллокации возможно получать и решать, например, по орбитальным данным от международной системы слежения за спутниками, раскрывающими тактику и стратегию удержания СКА.
Минимальное межспутниковое расстояние при выполнении условия (2) 8 км.
Ввиду того, что моменты прохождения аппаратами плоскости экватора разнесены на ~ 6 ч, КА не создают взаимных помех в работе.
Автономная коллокация на принципах (2) позволяет также рассогласование по любому из условий (2) относительно номинала 90° до 25°.
Аналог 3 расходится с аналогом 2 баллистическим обеспечением, включающим использование в алгоритмическом представлении в отличие от годографов принудительной эволюции вектора наклонения в аналоге 2 эллипсов дистанцирования КАСК (МКА) от «чужого» КА в плоскости XY инерциальной геоцентрической системы координат.
И все же, в приведенных выше способах автономной коллокации необходима подстройка под текущие параметры орбиты СКА: УР СКА должен быть равен УР КАСК.
4. Из уровня техники известен способ коллокации разнесением двух КА по гринвичской долготе, который можно отнести к способам автономной коллокации. С помощью двигателей малой тяги проводят коррекции удержания КА по гринвичской долготе, эксцентриситету и широте (наклонению). Данный способ взят за прототип. Достоинством прототипа является (при существовании буферной зоны порядка не менее суммарной погрешности знания текущего положения обоих КА по долготе по наихудшему варианту) практически полная независимость КА друг от друга. Остается необходимость в нахождении «соседа» (КАСК) на долготной дистанции от СКА, оговоренной рекомендациями Международного союза электросвязи. Прототип предполагает, что оба КА добровольно делят между собой номинальную область удержания по долготе примерно на равные части. Недостатками прототипа являются слишком узкая в итоге область удержания по долготе для каждого из КА и, как следствие, повышенный расход топлива на коррекции уклонения и повышенные риски критического сближения аппаратов, либо невозможность гарантированного разнесения по долготе. В данной области по долготе могут находиться уже не один, и не два СКА. Реализуемость способа при существующих плотностях заселения ГСО КА маловероятна. Однако если для каждого из двух КА область удержания по долготе составит ±0,05°, функционирование каждого их них на своих рабочих позициях будет успешным.
Для заявленного способа автономной коллокации на околостационарной орбите выявлены основные общие существенные признаки, такие как измерения параметров орбиты каждого КА; определение по ним текущих значений орбитальных элементов каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты; за время до приведения КАСК в заданную область удержания по долготе и широте (наклонению) - по данным независимых траекторных измерений выявление стратегии управления движением центра масс СКА; отнесение рабочей позиции (центра области удержания по долготе) КАСК за область удержания по долготе СКА.
Технической проблемой изобретения является создание способа коллокации, полностью свободного от эволюций параметров орбиты смежного КА. Поставленная проблема решается тем, что
1. Способ автономной коллокации на околостационарной орбите, включающий измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, за время до приведения КАСК в заданную область удержания по долготе и широте (наклонению) -по данным независимых траекторных измерений выявление стратегии управления движением центра масс СКА, отнесение рабочей позиции (центра области удержания по долготе) КАСК за область удержания по долготе СКА, отличается тем, что в процессе приведения на рабочую позицию и подготовки к функционированию КАСК по целевому назначению наклонение орбиты КАСК доводят до величины imin, рассчитываемой по формуле:

где imin - минимальное допустимое наклонение орбиты КАСК;
RГСО - радиус номинальной ГСО, 42164 км;
 - максимальное наклонение орбиты СКА;
- максимальное наклонение орбиты СКА;
emax - максимальный допустимый эксцентриситет орбиты КАСК;
Dz - буферная зона по долготе между областями удержания КАСК и СКА, км;
Sz - номинальная зона отчуждения, км,
при этом imin не меньше наклонения совмещают линию узлов с линией апсид орбиты КАСК, приводят КАСК в находящуюся рядом с областью рабочей позиции СКА область рабочей позиции по долготе с параметрами:
- ширина области удержания по средней гринвичской долготе ±(1-1,5) минуты;
- зазор между областями по долготе КАСК и СКА - Dz/RГСО,
начальную целевую точку по вектору эксцентриситета E1 [ех=0; ey=emax] меняют на Е2 [ех=0; еу=-emax], совмещенными коррекциями орбиты поддерживают в заданных диапазонах наклонение, среднюю гринвичскую долготу, эксцентриситет и угол рассогласования линий узлов и апсид орбиты КАСК в течение всего срока активного существования на рабочей позиции, в течение этого срока регулярно чередуют целевые точки: Е2, Е1, Е2, ….
2. Способ автономной коллокации по п. 1, отличается тем, что при emax>3еуст, где еуст - модуль вектора устойчивого эксцентриситета, при котором можно, совместив конец его вектора с направлением на Солнце, получить гелиосинхронное движение этого вектора, коррекции вектора эксцентриситета проводят, чтобы устранить только вековой угловой дрейф линии апсид относительно векового углового дрейфа линии узлов орбиты КАСК.
Средняя гринвичская долгота - это среднее из гринвичских долгот перигея и апогея орбиты КАСК.
Вероятно, еще на стадии разработки документации по КА будут известны условия удержания КАСК на рабочей позиции. Если нет, то смену стратегии удержания на ГСО можно будет произвести на этапе подготовки КА к штатной работе без какого-либо ущерба. Более того, перевод геостационарного КА в статус геосинхронного экономит топливо за счет вычета коррекций наклонения, требуемых на этапах довыведения на ГСО геостационарных КА и приведения их на рабочую позицию, при уменьшении реализованного начального наклонения до практического нуля.
Номинальная зона отчуждения - это оговоренное международным регламентом минимальное расстояние между КА. В настоящее время Sz составляет 10 км.
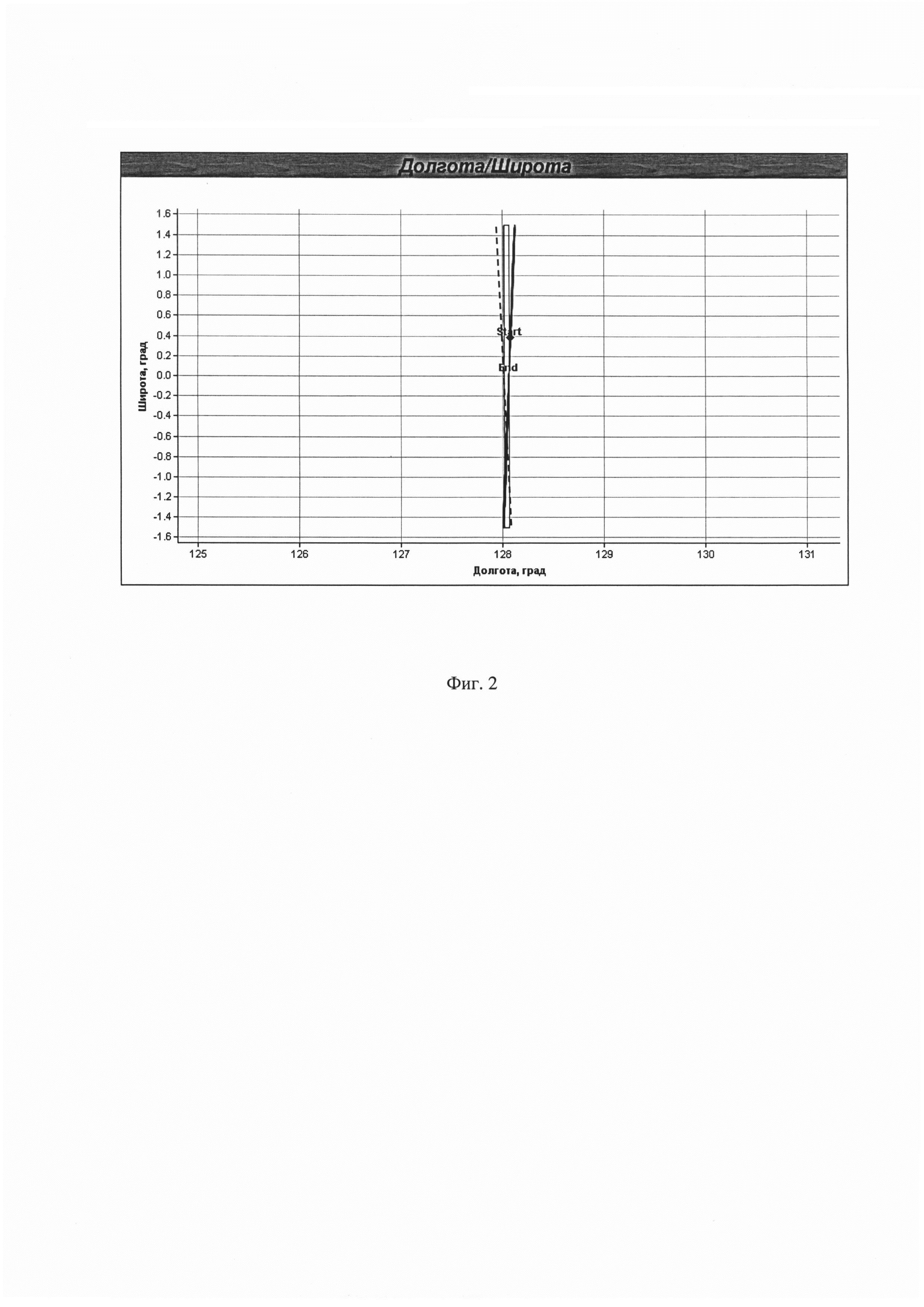
На фиг. 1 показана принципиальная пространственная схема коллокации, на фиг. 2 приведена суточная эволюция КАСК в фазовой плоскости [L;ϕ] при условии:

Введены следующие обозначения:
1 - смежная с областью удержания СКА граница области удержания по долготе (ОУД) КАСК;
2 - трасса КАСК в фазовой плоскости [L;ϕ] на границах ОУД;
3 - граница ОУД КАСК с учетом эксцентриситета его орбиты.
Конечно, реальные трассы (фиг. 2) отличаются от показанной на фиг. 1. Долгота за счет изменения [аргумента] широты КА (u=ϕ):

изменяется нелинейно, но эта нелинейность на широтах ±0,1° пренебрежимо мала. Вообще, можно не учитывать колебания по долготе за счет наклонения и эксцентриситета. Последнее возможно ввиду того, что выход по долготе из рабочей области стояния на широтах, превышающих установленную норму для геостационарных КА, не следует считать нарушением международного регламента, поскольку в определенное время на витке геосинхронный КА находится в неоговоренном регламентом пространстве и реально никому не мешает.
Минимальная буферная зона Dz (фиг. 1) для номинальных ОУД ±0,1° относительно рабочей позиции оставляет порядка 12,3 км (1 минута), минимальная разница (Dz - Sz) равна 2,3 км, и при  равном 0,1° будем иметь в градусах imin=3666,67⋅emax.
равном 0,1° будем иметь в градусах imin=3666,67⋅emax.
На фиг. 1 представлена схема коллокации, в строгом понимании, геосинхронного КА (это КАСК) и геостационарного КА (СКА). Величину  отрицая всякую адаптацию к стратегии удержания СКА, можно заменить на рекомендуемую величину максимального наклонения для геостационарного (но не геосинхронного) КА imax равную 0,1°. Конечно, если СКА - это геостационарный КА.
отрицая всякую адаптацию к стратегии удержания СКА, можно заменить на рекомендуемую величину максимального наклонения для геостационарного (но не геосинхронного) КА imax равную 0,1°. Конечно, если СКА - это геостационарный КА.
Минимизация расхождения линии узлов и линии апсид обязательна и является основным отличительным признаком изобретения. Без минимизации ω трассы КА в фазовой плоскости [L;ϕ] не будут такими, как показано на фиг. 2, а будут «гулять» по всей области удержания и регулярно на суточном интервале заходить в область СКА (фиг. 1). Ограничение на величину УР то же, что и для выполнения условия (2) в способах-аналогах - порядка ±(25-30) градусов относительно нуля. Чтобы линии апсид и узлов КАСК были в приемлемо совпадающем положении (то есть (Ω+ω) ≈ Ω), необходимо управлять аргументом широты КАСК, так как коррекции вектора эксцентриситета орбиты КАСК в части изменения ω значительно эффективнее коррекций вектора наклонения в части изменения Ω (потому что реальный эксцентриситет значительно меньше реального наклонения в радианах).
Изобретение использует два способа коррекции вектора эксцентриситета.
Способ 1. Стремление к выбранной целевой точке.
На этапе удержания при выбранном emax начальную достигнутую целевую точку [ех=0; еу=emax], где ех=e⋅cos(Ω+ω); еу=e⋅sin(Ω+ω), меняют на противоположную точку [ех=0; еу=-emax]. Далее, по достижении  выбранной целевой точки, ее меняют на противоположную. Тем самым, значительную часть времени КАСК по средней долготе будет находиться «глубоко» в своей ОУД.
выбранной целевой точки, ее меняют на противоположную. Тем самым, значительную часть времени КАСК по средней долготе будет находиться «глубоко» в своей ОУД.
Используют при emax ≤ 3еуст, где еуст - модуль вектора устойчивого эксцентриситета (Приложение 1).
В способе 1 одним из выбранных двигателей малой тяги, схема расположения которых позволяет проводить регулярную трехпараметрическую совмещенную коррекцию  коррекции проводят со стремлением к целевым точкам (средним позициям). За редким исключением, дополнительных затрат на удержание по средней долготе и эксцентриситету не требуется. В случае неблагоприятного расположения двигателей коррекции, разворот ω на 25° будет иметь статус самостоятельной коррекции вектора эксцентриситета. При е равном (0,0002-0,00065), - наиболее распространенном в области ±(0,05-0,1) градуса, на поворот аргумента широты перигея на 25° потребуется (0,133-0,433) м/с приращения характеристической скорости. Изменение на (25-30) градусов происходит при е равном 0,0002 минимум за 14 суток и за 22 суток в среднем за год. При устранении УР удержание скоро сведется к удержанию ω при е ≈ еуст, и периодичность коррекций ω увеличится до минимум 30 суток. Это хорошая перспектива, вписывающаяся в строку топливного бюджета по затратам на коррекции удержания по долготе, если говорить о самостоятельной коррекции эксцентриситета. Суточная норма времени работы двигателя малой тяги 8 Гс составляет до 3 ч, что составляет (при массе КАСК порядка 2500 кг) до 0,338 м/с.Этого ресурса работы в суточном цикле из двух коррекций через 12 ч вполне хватит на разворот
коррекции проводят со стремлением к целевым точкам (средним позициям). За редким исключением, дополнительных затрат на удержание по средней долготе и эксцентриситету не требуется. В случае неблагоприятного расположения двигателей коррекции, разворот ω на 25° будет иметь статус самостоятельной коррекции вектора эксцентриситета. При е равном (0,0002-0,00065), - наиболее распространенном в области ±(0,05-0,1) градуса, на поворот аргумента широты перигея на 25° потребуется (0,133-0,433) м/с приращения характеристической скорости. Изменение на (25-30) градусов происходит при е равном 0,0002 минимум за 14 суток и за 22 суток в среднем за год. При устранении УР удержание скоро сведется к удержанию ω при е ≈ еуст, и периодичность коррекций ω увеличится до минимум 30 суток. Это хорошая перспектива, вписывающаяся в строку топливного бюджета по затратам на коррекции удержания по долготе, если говорить о самостоятельной коррекции эксцентриситета. Суточная норма времени работы двигателя малой тяги 8 Гс составляет до 3 ч, что составляет (при массе КАСК порядка 2500 кг) до 0,338 м/с.Этого ресурса работы в суточном цикле из двух коррекций через 12 ч вполне хватит на разворот  даже при модуле эксцентриситета порядка 0,0006: УР может составить 25° за 35 суток минимум и за 55 суток в среднем за год.
даже при модуле эксцентриситета порядка 0,0006: УР может составить 25° за 35 суток минимум и за 55 суток в среднем за год.
При любом эксцентриситете затраты характеристической скорости на разворот УР в 25° составят не более 2,3 м/с/год.
Способ 2. Коррекция векового дрейфа ω относительно векового дрейфа Ω.
Нецентральность гравитационного поля Земли является единственной причиной векового вращения линии узлов (минус 4,9 градуса/год относительно направления вращения Земли) и линии апсид (плюс 9,8 градусов/год). Потребуется всего лишь одна-две коррекции УР за два года, и то - в случае неблагоприятного расположения двигателей коррекции относительно осей связанной с КА системы координат (ССК).
Используют при emax > 3еуст. Реализация способа 2 исключает периодические колебания УР с амплитудой более (25-30) градусов.
Итак, суть изобретения сводится к максимальному уменьшению ОУД за счет исключения из нее коротко- и долгопериодических колебаний за счет наличия какого бы то ни было эксцентриситета орбиты КАСК, и распространению этих колебаний на область пространства, где они не являются критичными.
В плане слежения за КА на ОСО представим, что антенна земной станции (ЗС) осью своей диаграммы направленности (ДН) наведена на центр рабочей области удержания КА. В том случае, когда КА совершает дрейф (др) по широте в пределах ширины ДН ±Θдр=±Δϕдр, то для ЗС необходимость в слежении за КА отсутствует.
Ширина ДН антенны обычно измеряется по уровню половинной мощности и обозначается Θ0,5. Тогда отсутствие необходимости в слежении за КА соответствует условию:

при этом ширина ДН антенны выражается через ее диаметр D и длину волны λ как

В радиолиниях командно-измерительных систем (КИС) используют частоты [4-6] ГГц, что соответствует λ (0,05-0,075) м, и при ширине Θдр равной 2° условие (6) с учетом условия (7) будет выполняться при D меньшем или равном 17,5 λ, то есть (0,875-1,300) м. В реальности антенны ЗС КИС имеют значительно большие размеры (равно - более узкие ДН). Поэтому на ЗС КИС слежение обеспечивать необходимо. С другой стороны, на борту КА антенны КИС имеют очень широкие ДН (не менее 70°), и устройствами автоматического наведения их не оборудуют.
В отношении ЗС связи. Размер антенн таких ЗС будет определяться энергетическими соотношениями в радиолинии, необходимыми для передачи информации с заданными скоростью и качеством. С большой вероятностью размер антенн окажется  чем это необходимо для выполнения условия (7), то есть система слежения на ЗС связи будет необходима. Бортовые антенны связи устройствами автоматического наведения не оборудуют. С точки зрения реализации радиолиний для обмена связной информацией, опыт разработок КА с дрейфом по широте ±5° и более показывает, что в процессе перемещения КА центральные земные станции не выходят за пределы зоны обслуживания, формируемой бортовой антенной с шириной луча от 2 до 3 градусов, поскольку при движении по широте поддерживается штатная ориентация оси минус X и оси Y ССК, и, из рассмотрения геометрии положения бортового луча связи, следует достаточность отклонения наземной антенны от центра рабочей области в меридианальной плоскости ЗС наземной антенны на угол γ=(ϕ+Δγ), Δγ - линейный доворот угла γ в меридианальной плоскости ЗС, равен 0,178 ϕ: при изменении широты КА на 1 градус Δγ изменится на 10,7 минут. Те же угловые минуты вообще требуются для полного совмещения центра ДН бортовой антенны с центром ДН антенны ЗС. Но при ширине ДН Θ0,5 бортовой антенны даже в 1° ее доворот на 10,7 минут не требуется.
чем это необходимо для выполнения условия (7), то есть система слежения на ЗС связи будет необходима. Бортовые антенны связи устройствами автоматического наведения не оборудуют. С точки зрения реализации радиолиний для обмена связной информацией, опыт разработок КА с дрейфом по широте ±5° и более показывает, что в процессе перемещения КА центральные земные станции не выходят за пределы зоны обслуживания, формируемой бортовой антенной с шириной луча от 2 до 3 градусов, поскольку при движении по широте поддерживается штатная ориентация оси минус X и оси Y ССК, и, из рассмотрения геометрии положения бортового луча связи, следует достаточность отклонения наземной антенны от центра рабочей области в меридианальной плоскости ЗС наземной антенны на угол γ=(ϕ+Δγ), Δγ - линейный доворот угла γ в меридианальной плоскости ЗС, равен 0,178 ϕ: при изменении широты КА на 1 градус Δγ изменится на 10,7 минут. Те же угловые минуты вообще требуются для полного совмещения центра ДН бортовой антенны с центром ДН антенны ЗС. Но при ширине ДН Θ0,5 бортовой антенны даже в 1° ее доворот на 10,7 минут не требуется.
ОПУ - опорно-поворотное устройство, предназначено для углового перемещения направления максимального излучения (приема) антенны ЗС. ОПУ ([1] Фролов О.П. Антенны для земных станций спутниковой связи. М., «Радио и связь»,2000 г., стр. 94-100) должны обеспечивать, кроме прочего, реализацию режима наведения на КА (если совсем конкретно, - на ретранслятор КА, прим. автор.) и его автосопровождение. Основными параметрами ОПУ являются предельные значения угловых перемещений максимума ДН и скорости угловых перемещений. В состав ОПУ включен процессор, анализирующий уровень сигнала при пошаговом перемещении луча антенны ЗС, который выдает команды на корректировку эволюции луча согласно уровню сигнала так, чтобы каждый раз принимался с КА более сильный сигнал, чем тот, который принимался на предыдущем шаге.
В [1], стр. 95 говорится: «После того как спутниковая связь окончательно перешла на работу с ретрансляторами, расположенными на ГСО (речь идет исключительно о геостационарных КА, прим. автор.), основным элементом перемещения зеркал антенн ЗС стал электромеханический привод в виде винтового толкателя. Это устройство преобразует вращательное движение электродвигателя в линейное изменение длины винта привода. Так как в ОПУ используется малые передаточные числа преобразователя вращения в поступательное движение, то даже при использовании маломощных электродвигателей привод обеспечивает нужные усиления для перемещения зеркала, правда, при небольших скоростях». Но больших скоростей (а это скорости порядка (1-2) градуса/с) на ГСО и ГСхО и не надо.
Описание ОПУ из [1] приведено здесь, чтобы показать, что автослежение антенн ЗС КИС и ЗС связи в настоящее время - обычная практика и, следовательно, заявленный способ коллокации не требует дополнительных серьезных затрат на установку антенных систем с электроприводами для точного наведения антенн на объект связи.
Предлагаемое изобретение имеет ограничение: в каждой из рядом находящихся областей долгот ГСО не могут находиться по геосинхронному КА.
Предлагаемый способ автономной коллокации на ОСО позволяет не только в 4-5,9 раз (с ± 0,1 градуса до ± (0,017-0,025) градуса) сократить ширину ОУД для целей автономной (и «дружественной», то есть согласованной) коллокации, но и пересмотреть, ввиду перенаселенности уникальной ГСО, международный регламент (рекомендации) по удержанию КА на ОСО в части возможности долготной коллокации геосинхронных и практически геостационарных КА с уже находящимися на ОСО геостационарными КА.
Годограф вектора эксцентриситета
Влияние малого импульса скорости (приращения скорости за секунду)  на эксцентриситет е и аргумент широты перигея ω описывается соотношениями [1], К. Эрике «Космический полет», т. II, часть 1, стр. 388 (см. фиг. 3, цифрами на которой обозначены: 4 - Солнце; 5 - Земля; 6 - КА; 7- орбита КА на текущую эпоху; 8 - перигей орбиты КА; 9 - орбита КА в эпоху, когда центр Земли, перигей и Солнце находятся на одной линии; 10 - радиус большого круга еуст), учитывающими тангенциальное и нормальное возмущения в плоскости орбиты:
на эксцентриситет е и аргумент широты перигея ω описывается соотношениями [1], К. Эрике «Космический полет», т. II, часть 1, стр. 388 (см. фиг. 3, цифрами на которой обозначены: 4 - Солнце; 5 - Земля; 6 - КА; 7- орбита КА на текущую эпоху; 8 - перигей орбиты КА; 9 - орбита КА в эпоху, когда центр Земли, перигей и Солнце находятся на одной линии; 10 - радиус большого круга еуст), учитывающими тангенциальное и нормальное возмущения в плоскости орбиты:


где ϑ - средняя скорость движения КА, 3074 м/с;
η=α-θ - истинная аномалия;
θ - угол между направлением на Солнце и на перигей орбиты КА.
Тогда, подставляя выражение η в (3) и используя формулы разности двух углов, получаем:
Первое слагаемое, как минимум, на два порядка меньше остальных и не является постоянным членом, тогда

При θ=0

Аналогично рассуждая, будем иметь для скорости движения (аргумента широты) перигея:

При θ=0

Далее,

где 
 - среднее движение Солнца, с-1,
- среднее движение Солнца, с-1,
тогда


Интегрируем на сутках (на витке):

при θ=0 Δeсут=0;

при θ=0

Дадим оценку  . Световое давление описывается формулой
. Световое давление описывается формулой

где S - мощность световой волны, падающей на 1 м2 поверхности тела, вт/м2;
А - коэффициент отражения (A=0 для абсолютно черного тела);
с - скорость света, км/с.
S=1,4⋅103вт/м2.
Значение А зависит от отражающей способности деталей конструкции КА и в контексте данного технического решения должно включать (условно) гравитационное воздействие Солнца как «±» относительно положения, когда вектор Лапласа направлен на Солнце. Для реальных КА на высоте стационарной орбиты значения А находятся в пределах [0,28-0,44]. Исходя из А=0,44, будем иметь Р равное 6,72⋅10-6 н/м2. Поскольку сила светового давления F=S'⋅P, где S' - площадь миделевого сечения, то

Отношение  для современных отечественных КА более или менее постоянно и равно порядка (2,3-2,6)⋅10-2. Тогда, к примеру, при k=0,0259
для современных отечественных КА более или менее постоянно и равно порядка (2,3-2,6)⋅10-2. Тогда, к примеру, при k=0,0259 
Как показывает численное интегрирование, период цикличности для эксцентриситета составляет несколько больше года - порядка 390 суток. Подстановка  в уравнение (13) дает при
в уравнение (13) дает при  значение е=еуст порядка 0,00045, то есть для того, чтобы скорость движения перигея равнялась скорости движения Солнца, необходимо иметь устойчивый эксцентриситет. Оригинальный вывод формул (11-13) приведен для раскрытия сущности понятия устойчивого эксцентриситета. Энергозатраты на поддержание еуст практически отсутствуют.
значение е=еуст порядка 0,00045, то есть для того, чтобы скорость движения перигея равнялась скорости движения Солнца, необходимо иметь устойчивый эксцентриситет. Оригинальный вывод формул (11-13) приведен для раскрытия сущности понятия устойчивого эксцентриситета. Энергозатраты на поддержание еуст практически отсутствуют.








Способ защиты командно-измерительной системы космического аппарата
Способ эскплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата, эксплуатирующегося на низкой околоземной орбите
Способ коррекции орбитального движения космического аппарата
Способ резервирования космического аппарата на геостационарной орбите
Способ мониторинговой коллокации на геостационарной орбите
Держатель
Регулируемый узел крепления
Способ автономной коллокации на геостационарной орбите
Способ электрических проверок космического аппарата
Многоканальный командный аппарат с электронной коммутацией
Способ регулирования и стабилизации давления в рабочих установках сильфонного типа
Способ удержания геостационарного космического аппарата на заданной орбитальной позиции
Способ оценки параметров и демодуляции случайных сигналов
Способ удержания геостационарного космического аппарата на заданной орбитальной позиции
Способ адаптивного управления движением центра масс космического аппарата
Способ коррекции орбитального движения космического аппарата
Способ коррекции орбитального движения космического аппарата
Многофункциональная космическая система ретрансляции для информационного обмена с космическими и наземными абонентами
Способ обнаружения случайных низкоэнергетических сигналов
Циклотронный плазменный двигатель

