Результат интеллектуальной деятельности: ДИФФЕРЕНЦИАЛЬНОЕ ТОРМОЖЕНИЕ КОЛЕС ОПОРЫ ШАССИ САМОЛЕТА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и взаимодействующей с ним системе управления для торможения левым и правым колесами опоры шасси.
Уровень техники
Типичный самолет имеет опору шасси, содержащую множество сборочных узлов опоры шасси с колесами, которые поддерживают самолет, когда он находится на земле. Сборочные узлы опоры шасси используются для управления перемещением самолета во время маневрирования на земле, например такого как посадка, выруливание и взлет. Типичный большой самолет с реактивной тягой включает в себя сборочный узел передней опоры шасси (NLG) для управления направлением перемещения, расположенный в направлении передней части фюзеляжа, и множество сборочных узлов основной опоры шасси (MLG), расположенных в направлении назад от сборочного узла передней опоры шасси и распределенных в боковом направлении относительно плоскости симметрии самолета. Каждый из сборочных узлов основной опоры шасси обычно включает в себя один или более исполнительных механизмов, которые управляются таким образом, чтобы обеспечивать силу торможения и/или движущую силу чтобы, соответственно, замедлять и/или ускорять колеса этого сборочного узла основной опоры шасси.
В определенных условиях пилот самолета может управлять дифференциальным торможением левой и правой основных опор шасси. Более сильное торможение левой основной опоры шасси дает левый поворот, а более сильное торможение правой основной опоры шасси дает правый поворот.
Документ US 4646242 раскрывает автоматическую функцию торможения, которая применяет постоянное замедление во время фазы раскручивания самолета, которая является фазой, следующей после того, как основные опоры шасси совершили касание земли во время приземления, но перед тем как передняя опора шасси совершила касание земли. Автоматическая функция торможения выбирается летным экипажем перед приземлением за счет установки селекторного переключателя выбора замедления на желаемый уровень замедления. Проблема, связанная с автоматической функцией торможения, описанной в документе US 4646242, состоит в том, что она не предоставляет возможность для дифференциального торможения.
Раскрытие изобретения
Первый аспект изобретения обеспечивает способ торможения левого и правого колес опоры шасси на соответствующей левой и правой сторонах самолета, при этом способ содержит: прием желаемого параметра (L) левого торможения для левого колеса; прием желаемого параметра (R) правого торможения для правого колеса; торможение левого колеса с уменьшенным параметром (L') левого торможения, который имеет меньшее значение, чем желаемый параметр (L) левого торможения; торможение правого колеса с уменьшенным параметром (R') правого торможения, который имеет меньшее значение, чем желаемый параметр (R) правого торможения; и поддерживание разницы между параметрами торможения таким образом, что L'-R'=L-R.
Первый аспект изобретения также обеспечивает систему управления торможением, запрограммированную таким образом, что контролировать левый и правый тормоза самолета за счет: приема желаемого параметра (L) левого торможения для левого тормоза; приема желаемого параметра (R) правого торможения для правого тормоза; определения уменьшенного параметра (L') левого торможения, который имеет меньшее значение, чем желаемый параметр (L) левого торможения; определения уменьшенного параметра (R') правого торможения, который имеет меньшее значение, чем желаемый параметр (R) правого торможения, при этом L'-R'=L-R; и вывода уменьшенных параметров торможения к левому и правому тормозам.
Первый аспект изобретения уменьшает количество торможений, прикладываемых к колесам (по сравнению с желаемыми параметрами торможения), таким образом ограничивая риск повреждения самолета, в то же время поддерживая разницу между параметрами торможения таким образом, что любое желаемое дифференциальное торможение все еще прикладывается, несмотря на общее уменьшение для торможения.
В предпочтительном варианте осуществления изобретения, описываемом ниже со ссылками на таблицу 1, первый аспект изобретения выполняется с помощью блока управления, когда он находится в логическом состоянии В.
Уменьшенные параметры торможения могут применяться независимо от общего торможения (L+R), управляемого с желаемыми параметрами торможения, но в предпочтительном варианте осуществления изобретения способ дополнительно содержит определение, в соответствии с которым сумма (L+R) левого и правого желаемых параметров торможения превышает пороговое значение; торможение левого и правого колес с желаемыми левым и правым параметрами (L, R) торможения, соответственно в ответ на определение, что сумма (L+R) не превышает пороговое значение; и торможение левого и правого колес с уменьшенными левым и правым параметрами (L', R') торможения, соответственно в ответ на определение, что сумма (L+R) превышает пороговое значение. Таким образом, в предпочтительном варианте осуществления изобретения уменьшенные параметры торможения применяются только в том случае, если сумма (L+R) превышает пороговое значение. Пороговое значение может быть фиксированным, или может зависеть от определенных факторов во время заданного полета, таких как вес или скорость самолета.
Сумма (L'+R') уменьшенных параметров торможения может изменяться, но более предпочтительно, если она по существу равна пороговому значению.
Второй аспект изобретения обеспечивает способ торможения первого и второго колес опоры шасси на соответствующей первой и второй сторонах самолета, при этом способ содержит: прием первого желаемого параметра торможения для первого колеса; прием второго желаемого параметра торможения для второго колеса, при этом второй желаемый параметр торможения меньше, чем первый желаемый параметр торможения; определение дифференциального параметра торможения, в соответствии с разницей между параметрами торможения; определение, превышает ли параметр дифференциального торможения пороговое значение параметра торможения; торможение первого колеса с параметром дифференциального торможения в ответ на определение того, что параметр дифференциального торможения не превышает пороговое значение параметра торможения; и торможение первого колеса с пороговым значением параметра торможения в ответ на определение того, что параметр дифференциального торможения превышает пороговое значение параметра торможения.
Второй аспект изобретения также обеспечивает систему управления торможением, запрограммированную таким образом, что контролировать первый и второй тормоза самолета за счет: приема первого желаемого параметра торможения для первого тормоза; приема второго желаемого параметра торможения для второго тормоза, при этом второй желаемый параметр торможения меньше, чем первый желаемый параметр торможения; определение параметра дифференциального торможения, показывающего разницу между желаемыми параметрами торможения; определение, превышает ли параметр дифференциального торможения пороговое значение параметра торможения; вывод параметра дифференциального торможения к первому тормозу в ответ на определение того, что параметр дифференциального торможения не превышает пороговое значение параметра торможения; и вывод порогового значения параметра торможения к первому тормозу в ответ на определение того, что параметр дифференциального торможения превышает пороговое значение параметра торможения.
Второй аспект изобретения обеспечивает альтернативное решение для той же самой проблемы, которая упоминалась в первом аспекте изобретения: как ограничить риск повреждения для самолета, в то же время поддерживая разницу между параметрами торможения, для того чтобы любое желаемое дифференциальное торможение все еще прикладывалось. Если параметр дифференциального торможения является меньшим, чем пороговое значение, тогда он прикладывается к первому колесу, а если он больше, чем величина торможения, прикладываемого к первому колесу, тогда он ограничивается пороговым значением, чтобы избежать повреждения.
Как правило, второе колесо не тормозится, когда тормозится первое колесо с дифференциальными и равными пороговому значению параметрами торможения.
В предпочтительном варианте осуществления изобретения, описываемом ниже со ссылками на таблицу 1, второй аспект изобретения выполняется с помощью блока управления, когда он находится в логических состояниях C-F.
Последующее обсуждение относится к обоим аспектам изобретения.
Параметры торможения могут относиться к гидравлическому давлению (в случае гидравлической тормозной системы), крутящему моменту торможения, угловому замедлению колеса, или любому другому подходящему параметру, показывающему величину прикладываемого усилия торможения.
Желаемые параметры торможения могут быть приняты от компьютерной автоматической системы торможения, но более предпочтительно, если они принимаются от пилота экипажа самолета через одно или более пользовательских устройств ввода, таких как педали.
Способ также может выполняться во время низкоскоростного выруливания, когда самолет находится в фазе раскручивания после приземления, в которой колеса опоры шасси находятся на земле, но передняя опора шасси самолета еще не находятся на земле, или в любое другое время.
В предпочтительном варианте осуществления изобретения способ дополнительно содержит определение, находится ли самолет в фазе раскручивания, и выполнение способа в ответ на определение того, что самолет находится в фазе раскручивания.
Желаемые параметры торможения могут быть приняты непосредственно, как независимые вводы от двух педалей, или не напрямую, например, через единственный штурвал самолета, который вводит сумму (L+R) желаемых параметров торможения за счет перемещения штурвала самолета в направлении назад или вперед, и вводит разницу (L-R) между желаемыми параметрами торможения за счет перемещения штурвала самолета в направлении влево и вправо.
Как правило, колеса опоры шасси находятся на противоположных сторонах плоскости симметрии каркаса самолета. Предпочтительно, колеса разнесены от плоскости симметрии на одинаковое расстояние.
Краткое описание чертежей
Сейчас варианты осуществления изобретения будут описываться со ссылками на прилагаемые чертежи, в которых:
Фиг. 1а является видом спереди самолета;
Фиг. 1b является видом слева самолета;
Фиг. 1с является видом сверху самолета;
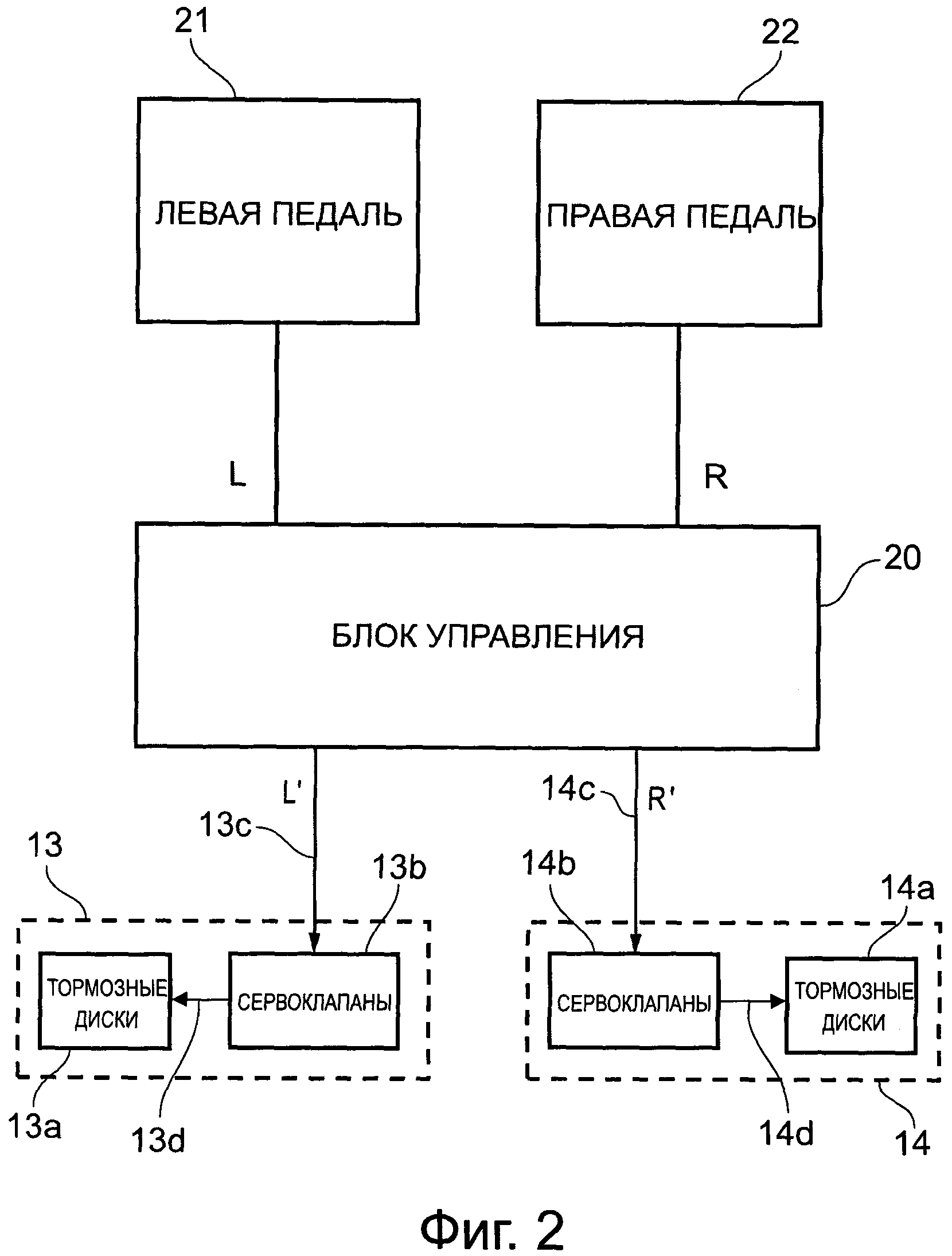
Фиг. 2 является схематической диаграммой, иллюстрирующей систему управления для контроля тормозов;
Фиг. 3 является логической блок-схемой, показывающей каким образом система управления определяет, что самолет находится в фазе раскручивания; и
Фиг. 4 является логической блок-схемой, показывающей каким образом система управления определяет выходные параметры торможения.
Осуществление изобретения
Фигуры 1а-1с показывают самолет 1, имеющий каркас самолета, содержащий фюзеляж 2 с крыльями 3, 4, проходящими наружу из фюзеляжа. Каркас самолета имеет плоскость 5 симметрии, содержащую продольную ось 6 (также известную как ось крена). Самолет 1 имеет центр 7 тяжести.
Самолет 1 имеет опору шасси, которая поддерживает самолет, когда он находится на земле и управляет перемещением самолета во время маневрирования по земле, например такого как приземление, выруливание и взлет. Опора шасси содержит сборочный узел 10 передней опоры шасси (NLG), расположенный впереди от центра 7 тяжести, и пару расположенных по левому борту и правому борту сборочных узлов 11, 12 основной опоры шасси (MLG) в направлении назад от центра 7 тяжести и расположенных на каждой боковой стороне плоскости 5 симметрии самолета. В других вариантах осуществления изобретения самолет может содержать дополнительные сборочные узлы основной опоры шасси, как правило, расположенные парами и на каждой боковой стороне плоскости 5 симметрии. Опора шасси обычно убираются, когда самолет 1 находится в полете, и выдвигаются перед посадкой.
Сборочный узел 10 передней опоры шасси имеет пару управляемых колес, которые могут поворачиваться силовым приводом системы управления для управления направлением перемещения самолета. Угол переднего колеса определяется как угол между направлением, по которому обращены управляемые колеса (т.е. направлением, в котором колеса вращаются в направлении, перпендикулярном оси вращения) и продольной осью 6 самолета 1. Угол переднего колеса может изменяться для управления направлением перемещения сборочного узла 10 передней опоры шасси, таким образом управляя курсом самолета. По дополнительному выбору сборочные узлы 11, 12 основной опоры шасси также могут быть управляемыми, чтобы управлять курсом самолета.
Каждый из сборочных узлов 11, 12 основной опоры шасси содержит 4-колесную тележку (альтернативно, может применяться 6-колесная тележка или тележка с любым количеством колес) с тормозами 13, 14 (показанными на фиг. 2), способными воздействовать на колеса для замедления тележки. Каждый тормоз 13, 14 прикладывает усилие зажима к комплекту углеродных тормозных дисков 13а, 14а (статоры и роторы), чтобы передавать тормозящий крутящий момент к колесу, в результате чего продольная замедляющая сила передается к тележке. Альтернативно, или в качестве добавления, каждый из тормозов может содержать мотор/генератор, действующий таким образом, чтобы прикладывать движущую/замедляющую силу к колесу, в результате чего приложение продольной силы для ускорения/замедления будет передаваться к тележке.
Тормоза 13, 14 сборочных узлов 11, 12 основной опоры шасси могут использоваться для того чтобы помогать управлению направлением перемещения самолета через дифференциальное торможение, которое является преднамеренным приложением несбалансированных тормозных сил к каждой стороне плоскости 5 симметрии самолета, чтобы создать физический поворачивающий момент для управления направлением перемещения самолета. Дифференциальное торможение может достигаться за счет приложения различных тормозных сил к каждой тележке сборочных узлов 11, 12 основной опоры шасси.
Операциям торможения и управления направлением перемещения также могут способствовать другие системы, например, интерцепторы и другие управляющие поверхности, а также двигатели самолета.
Тормоза 13, 14 приводятся в действие гидравлическим давлением, при этом более высокое гидравлическое давление обеспечивает более высокий тормозной крутящий момент. В частности, каждый тормоз имеет сервоклапан 13b, 14b, который управляется электрическим сигналом управления на входном трубопроводе 13с, 14с, причем значение этого сигнала управления определяет гидравлическое давление на гидравлическом выходном трубопроводе 13d, 14d, которое в свою очередь создает сжимающую силу на тормозных дисках.
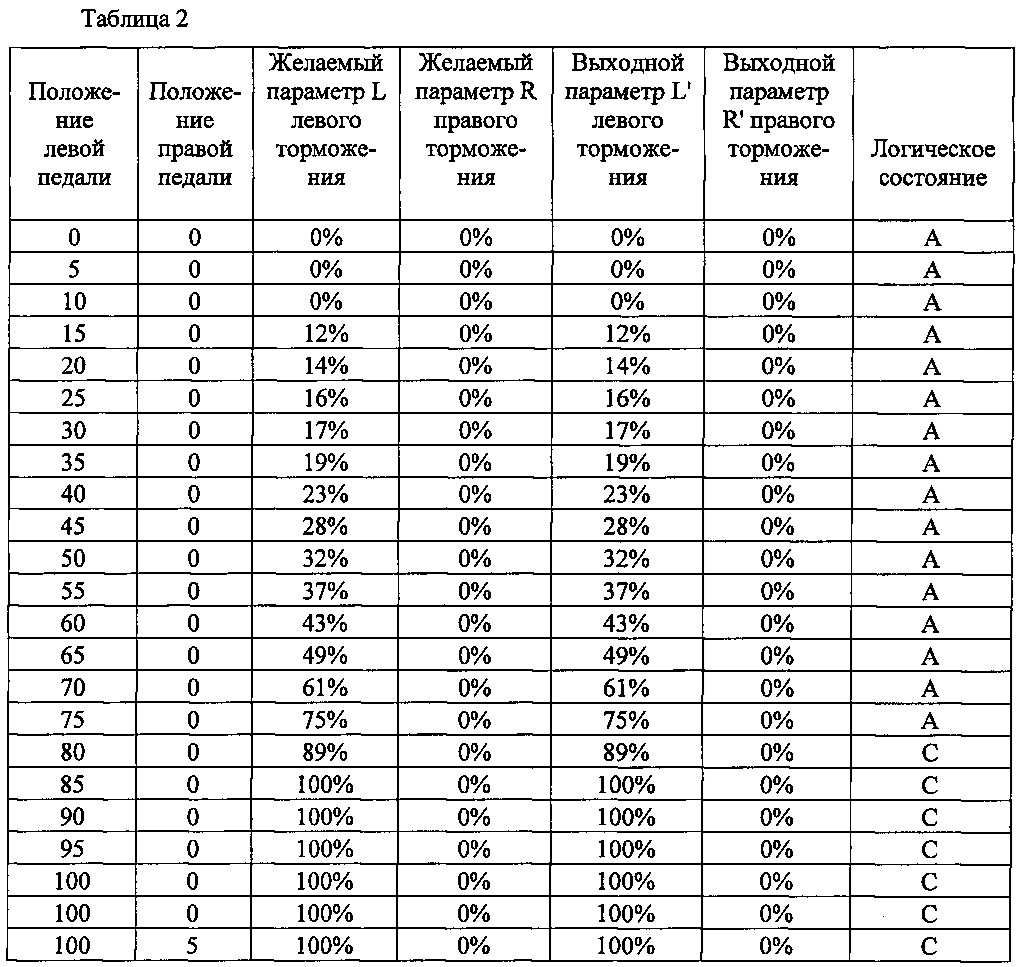
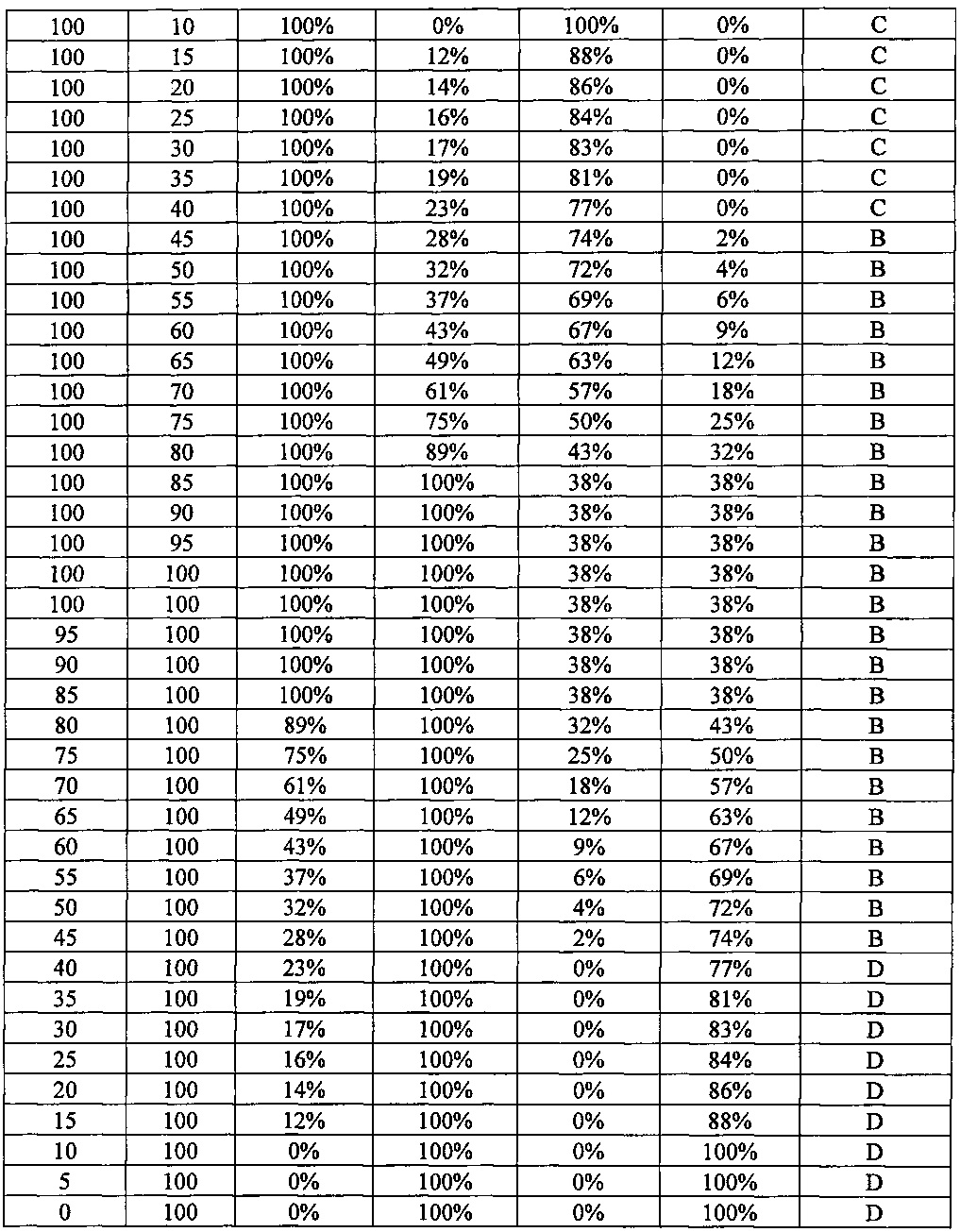
Самолет 1 включает в себя тормозную систему 20 управления в кабине самолета, показанную на фиг. 2, которая принимает входные сигналы от пары левой и правой тормозных педалей 21, 22, управляемых пилотом. Во время нормальной операции, когда нажимается левая педаль 21, увеличенное гидравлическое давление прикладывается к левым тормозным дискам 13а, а когда нажимается правая педаль 22, увеличенное гидравлическое давление прикладывается к правым тормозным дискам 14а. Соотношение между положением педали и гидравлическим давлением показано ниже в табл. 2. Когда педаль нажимается, давление сначала медленно поднимается, затем оно поднимается более быстро в направлении перемещения к предельному положению педали. В приведенном ниже описании гидравлическое давление, которое управляется левой педалью 21, определяется как желаемый параметр L левого торможения. Аналогичным образом, гидравлическое давление, которое управляется правой педалью 22, определяется как желаемый параметр R правого торможения.
Система 20 принимает желаемые параметры L, R торможения как входные значения от педалей 21, 22 и программируется компьютерным программным обеспечением, чтобы генерировать выходные параметры L', R' торможения, которые являются выходными для тормозов 13, 14, как показано на фиг. 2, таким образом тормоза 13, 14 прикладывают заданные выходные параметры торможения к соответствующим колесам. Система 20 программируется таким образом, чтобы применять логику, показанную на фиг. 3 и 4, чтобы генерировать эти выходные параметры L', R' торможения.
В первую очередь система 20 определяет, находится ли самолет в фазе раскручивания, за счет применения логики, показанной на фиг. 3. Фаза раскручивания является временем в полете, следующим сразу после приземления, когда сборочные узлы 11, 12 основной опоры шасси находятся на земле, а передняя опора 10 шасси еще нет. Установка/перезагрузка логических блоков 34, 35 производится в тот момент, когда выполняются условия для установки блока, тогда состояние остается истинным даже в том случае, если эти условия в дальнейшем теряются. Состояние остается истинным до тех пор, пока не будут выполнены условия для повторной установки логики.
Логика, показанная на фиг. 3, определяет, что самолет находится в этой фазе раскручивания в том случае, когда: a) скорость самолета больше, чем скорость при выруливании (которая определяется логическим блоком 30); b) передняя опора шасси не находится на земле или отклонение самолета по тангажу больше, чем естественное отклонение по тангажу плюс смещение, учитывающее наклон взлетно-посадочной полосы (как определяется AND логическим блоком 31); с) самолет перед этим взлетел или опоры шасси были выдвинуты или убраны (как определяется OR логическим блоком 32); и d) самолет не ускоряется или не подвергается высокой тяге двигателя (как определяется OR логическим блоком 33). Этот последний логический блок 33 гарантирует, что система 20 управления может произвести различие между фазой раскручивания во время приземления и аналогичной фазой раскручивания во время взлета.
Когда система 20 определяет, что самолет находится в фазе раскручивания, за счет применения логики, показанной на фиг. 3, в этом случае она применяет логику, показанную на фиг. 4, чтобы преобразовать желаемые параметры L, R торможения в выходные параметры L', R' торможения. Верхняя половина фиг. 4 показывает логику для определения левого параметра L' торможения, а нижняя половина фиг. 4 показывает логику для определения правого параметра R' торможения.
Логика фиг. 4 имеет определенное количество логических состояний (обозначенных как логические состояния A-F в расположенной ниже таблице 1), которые проектируются таким образом, чтобы прикладывать дифференциальное торможение во время фазы раскручивания, не вызывая повреждение самолета.
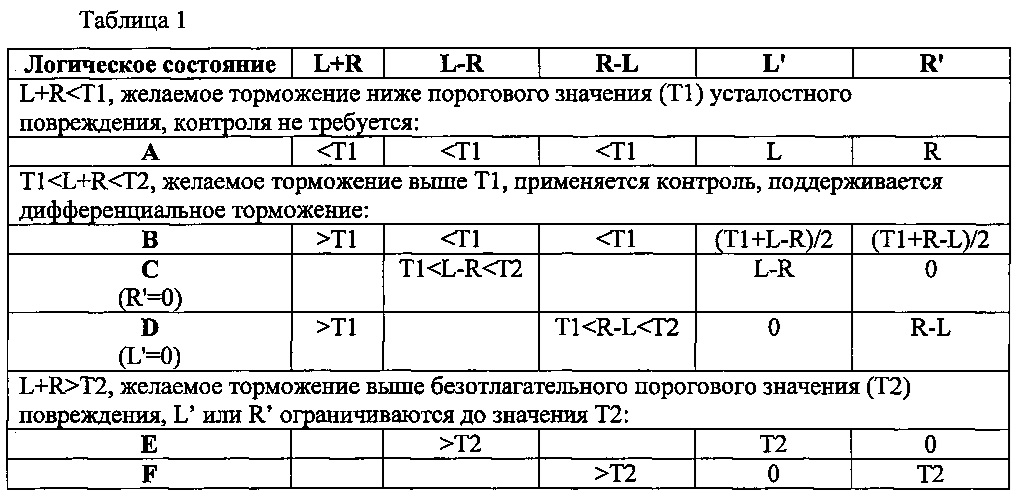
Система 20 определяет в MIN логических блоках 40, 41, превышает ли сумма (L+R) левого и правого параметров торможения пороговое значение (Т1). Каждый из MTN логических блоков 40, 41 выводит самое меньшее значение из этих двух входов. Пороговое значение Т1 устанавливается на уровне, выше которого существует риск усталостного повреждения, прикладываемого к передней опоре 10 шасси и другим частям передней части самолета вследствие высокой величины раскручивания, когда передняя опора 10 шасси касается земли. Если сумма (L+R) не превышает это пороговое значение Т1, тогда система 20 вводит логическое состояние А и тормозит левый и правый тормоза с желаемыми параметрами (L, R) торможения, соответственно, для левого и правого торможения. Другими словами, L'=L, a R'=R.
Если сумма (L+R) превышает пороговое значение Т1, тогда система 20 определяет параметр (Δ=L-R или R-L) дифференциального торможения, который является разницей между управляющим воздействием на левых тормозах и управляющим воздействием на правых тормозах. Система 20 вводит логическое состояние В и устанавливает значения L' и R' выше и ниже Т1/2 на равные величины, поддерживая параметр дифференциального торможения таким образом, что L'-R'=L-R (и эквивалентно, R'-L'=R-L).
В логическом состоянии В для дифференциального управляющего воздействия Δ, в котором L>R (т.е. для левого поворота) половина добавляется к L', а другая половина вычитается из R'. Логическое состояние В продолжается до тех пор, пока из R' нельзя уже ничего вычесть (т.е. R'=0) и в этой точке система входит в логическое состояние С и все дополнительные управляющие воздействия добавляются к L'. Логическое состояние С продолжается до максимального порогового значения Т2, которое будет вызывать немедленное структурное повреждение передней части самолета. Затем система входит в логическое состояние Е, ограничивая L' до Т2.
Аналогичным образом, для дифференциального управляющего воздействия Δ, в котором R>L (т.е. для правого поворота), половина добавляется к R', а другая половина вычитается из L'. Логическое состояние В продолжается до тех пор, пока из L' нельзя уже ничего вычесть (т.е. L'=0), и в этой точке система входит в логическое состояние D и все дополнительные управляющие воздействия добавляются к R'. Логическое состояние D продолжается до максимального порогового значения Т2, и в этой точке система входит в логическое состояние F, ограничивая R' до Т2.
Таким образом, когда система находится в логическом состоянии В, левое колесо тормозится уменьшенным левым параметром L' торможения, который имеет меньшее значение, чем желаемый левый параметр L торможения, и аналогичным образом правое колесо тормозится уменьшенным правым параметром R' торможения, который имеет меньшее значение, чем желаемый правый параметр R торможения. Параметры торможения уменьшаются на одинаковую величину, для того чтобы поддерживать параметр (Δ=L-R или R-L) дифференциального торможения, таким образом L'-R'=L-R (и эквивалентно, R'-L'=R-L). Кроме того, сумма (L'+R') уменьшенных параметров торможения устанавливается с помощью логики таким образом, чтобы она была равна пороговому значению Т1.
Логическое состояние В продолжается до тех пор, пока параметр Δ дифференциального торможения не будет превышать Т1. В этой точке и в это время при условии, что параметр Δ дифференциального торможения будет меньше чем Т2, система входит в логическое состояние С или D, отрабатывается торможение первого одного из тормозов с параметром Δ дифференциального торможения, а к другому тормозу не прикладывается тормозной крутящий момент.
Когда параметр Δ дифференциального торможения превышает Т2, то в этом случае система 20 входит в логическое состояние Е или F, ограничивая первый один из тормозов до порогового значения параметра Т2 торможения, в то же время поддерживая нулевой тормозной крутящий момент на другом тормозе.
Приведенная ниже таблица 2 приводит пример положений левой и правой педали и соответствующие им параметры торможения и логические состояния, основанные на нижнем пороговом значении Т1 в 75% и верхнем пороговом значении Т2 в 100%. В этом примере Т2 устанавливается довольно высоким, для того чтобы блок управления не входил в логическое состояние Е или F.
Хотя изобретение было описано выше со ссылками на один или более предпочтительных вариантов осуществления изобретения, следует принимать во внимание, что различные изменения или модификации могут быть произведены не выходя за пределы объема изобретения, как определено в прилагаемой формуле изобретения.
Например, описанная выше система 20 принимает желаемые параметры L, R торможения как прямые входы от двух педалей 21, 22, но в альтернативных вариантах осуществления изобретения педали 21, 22 могут быть заменены другими устройствами пользовательского ввода. В одном варианте осуществления изобретения пилот может вводить общее гидравлическое давление (эквивалентное L+R в приведенном выше варианте осуществления изобретения) с первого устройства пользовательского ввода и параметра Δ дифференциального торможения (положительное для левого поворота и отрицательное для правого поворота) со второго устройства пользовательского ввода. В другом варианте осуществления изобретения единственный штурвал самолета может использоваться для ввода как общей силы (L+R) торможения за счет перемещения штурвала самолета вперед и назад, так и для ввода параметра Δ дифференциального торможения за счет перемещения штурвала самолета влево и вправо.
В описанном выше варианте осуществления изобретения показанная на фиг. 4 логика управления используется только в том случае, если самолет находится в фазе раскручивания, как определяется логикой фиг. 3. В альтернативных вариантах осуществления изобретения аналогичная логика управления может использоваться для ограничения нагрузок на другие части структуры в других критических фазах (например, во время низкоскоростного выруливания), используя различные значения для Т1 и Т2.
Покрытие для акустической обработки, включающее функцию обработки наледи горячим воздухом
Способ управления тепловыми выбросами, генерируемыми летательным аппаратом, и устройство охлаждения для летательного аппарата, позволяющее применять упомянутый способ
Структура для акустической обработки, предназначенная, в частности, для воздухозаборника гондолы летательного аппарата
Система выхода воздуха для передней кромки летательного аппарата
Гондола летательного аппарата, содержащая средства отвода горячего воздуха
Гондола летательного аппарата, содержащая оптимизированную систему обработки инея
Панель ослабления волн, установленная между двигателем и воздухозаборником гондолы летательного аппарата
Панель для акустической обработки с интегрированным соединительным усилительным элементом
Устройство для опоясывания гондолы летательного аппарата
Устройство для опоясывания гондолы летательного аппарата

