Результат интеллектуальной деятельности: Робот-пропольщик
Вид РИД
Изобретение
Изобретение относится к сельскохозяйственному машиностроению, в частности к роботизированному транспортному средству, а также к способу с применением робота для автоматического удаления сорняков пропашных культур режущим инструментом в рядке и междурядьях.
Известен беспилотный робот для лазерной обработки растений, при этом он содержит раму с управляемыми колесами, систему управления и навигации с контрольно-измерительными приборами, систему питания и установленный на раме модуль лазерной обработки растений с технологическим адаптером для установки высоты расположения упомянутого модуля в соответствии с высотой обрабатываемых растений (патент РФ №2634104, опубл. 2017).
Известен беспилотный робот для магнитно-импульсной обработки растений, включающий раму, управляемые колеса, систему управления и навигации с контрольно-измерительными приборами и систему питания, при этом он снабжен установленными на раме адаптером и модулем магнитно-импульсной обработки растений, выполненным в виде магнитно-импульсного активатора с индуктором (патент РФ №2630397, опубл. 2017).
К недостаткам известных технических решений следует отнести: отсутствие возможности уничтожения сорных растений в рядке и междурядьях.
Наиболее близким по технической сущности к заявленному роботу-пропольщику является робототехническое средство Hortibot (http:www.tehnologyreview.com/news/408225/robotic-farmer/), состоящее из рамы, управляемых колес, системы управления и навигации с контрольно-измерительными приборами, системы питания, которое обеспечивает выполнение широкого спектра работ в интенсивных технологиях возделывания садов. Оснащается оно различными технологическими модулями: опрыскиватель-гербицидник, рыхлитель-пропольщик, косилка.
К недостаткам известных технических решений следует отнести: отсутствие возможности механического точечного удаления сорняков в рядке и адаптироваться к различным видам растений.
Технический результат - повышение качества прополки рядков и междурядий пропашных культур от сорных растений, снижение травмирования культурных растений за счет применения точечной обработки.
Указанный технический результат достигается роботом-пропольщиком, содержащим раму, управляющие колеса, систему управления и навигации с контрольно-измерительными приборами, систему питания, согласно изобретению дополнительно содержит три направляющие с каретками, две из которых выполнены в виде круглого стержня, а третья прямоугольного стержня, поперечины, три исполнительных привода, рабочий орган с двигателем постоянного тока и линейным приводом, при этом две направляющие с каретками крепятся к раме посредством опор, расположенных на концах направляющих, оси которых параллельно друг другу в горизонтальной плоскости и направлены в сторону движения робота-пропольщика, а третья направляющая с кареткой и поперечина имеют жесткое крепление с каретками первой и второй направляющих, оси поперечины и третьей направляющей параллельны друг другу в горизонтальной плоскости и перпендикулярны осям первым двум направляющим, при этом первый и второй исполнительные привода крепятся с кареткой и с поперечиной по концам с одной стороны, а третий исполнительный привод по центру с поперечиной с обратной стороны и с рамой посредством шарнирных узлов с вращательной парой пятого класса, при этом рабочий орган имеет соединение с двигателем постоянного тока и линейным приводом, которые последовательно расположены вертикально друг за другом, и которые жестко крепятся с третьей направляющей с кареткой, в нижней части рамы установлен датчик технического зрения.
Изобретение поясняется чертежами.
На фиг. 1 изображен общий вид робота-пропольщика.
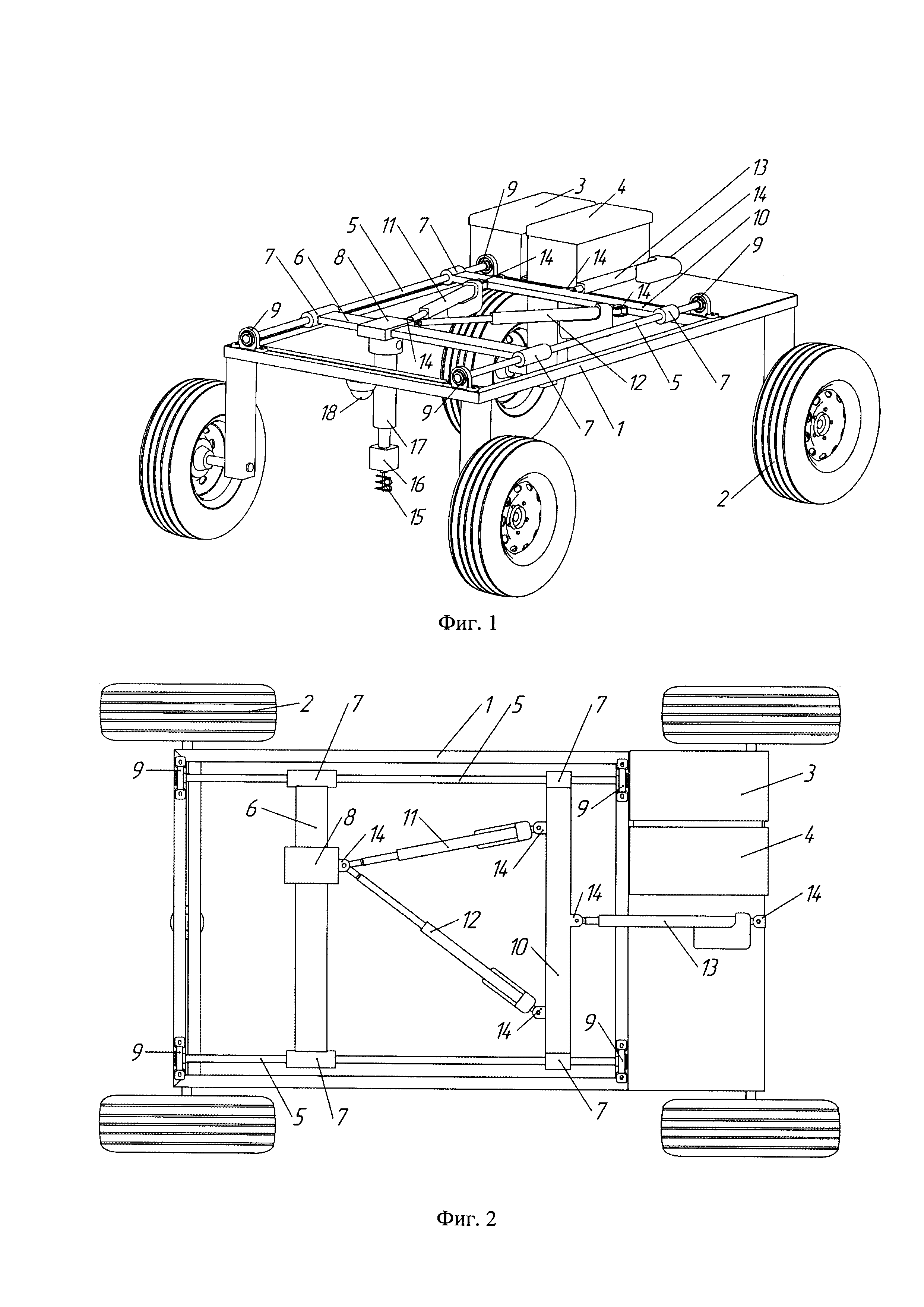
На фиг. 2 изображен вид сверху робота-пропольщика.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Предлагаемый робот-пропольщик (фиг.1, 2) состоит из рамы 1, управляющих колес 2, системы управления и навигации с контрольно-измерительными приборами 3, системы питания 4, трех направляющих 5, 6 с каретками 7, 8. При этом две направляющие 5 с каретками 7 выполнены в виде круглого стержня и крепятся на раму 1 посредством опор 9, расположенных на концах направляющих 5, оси которых параллельно друг другу в горизонтальной плоскости и направлены в сторону движения робота-пропольщика. Третья направляющая 6 с кареткой 8 выполнена в виде прямоугольного стержня и крепится с передними каретками 7 первой и второй направляющих 5. Между двумя направляющими 5 устанавливается поперечина 10, которая жестко крепится с задними каретками 7 первой и второй направляющих 5, при этом оси поперечины 10 и третьей направляющей 6 параллельны друг другу в горизонтальной плоскости и перпендикулярны осям первым двум направляющим 5. Перемещение поперечины 10 и направляющей 6 по осям направляющих 5, а также каретки 8 по направляющей 6 осуществляется тремя исполнительными приводами 11-13, которые устанавливаются следующим образом. Первый и второй исполнительные привода 11, 12 крепятся с кареткой 8 и с поперечиной 10 по концам с одной стороны, а третий исполнительный привод 13 по центру с поперечиной 10 с обратной стороны и с рамой 1 посредством шарнирных узлов 14 с вращательной парой пятого класса, при этом оси первого и второго исполнительных приводов 11, 12.
Для уничтожения сорняков предусмотрен режущий инструмент рабочего органа 15, который соединяется с двигателем постоянного тока 16 и линейным приводом (актуатором) 17 между собой и жестко крепятся с кареткой 8 расположенных в вертикальной плоскости последовательно друг за другом.
Для определения сорняков в рядке и междурядьях в нижней части рамы 1 устанавливается датчик технического зрения 18.
Работа робота-пропольщика осуществляется следующим образом.
С помощью системы управления и навигации с контрольно-измерительными приборами 3 робот-пропольщик заезжает в рядки с растениями. В автоматическом режиме с помощью датчика технического зрения 18, установленного спереди в нижней части рамы 1 определяются координаты расположения сорняков в рядке.
Режущий инструмент рабочего органа 15, соединенный с двигателем постоянного тока 16 и линейным приводом (актуатором) 17 перемещается к сорняку по определенным координатам и располагается над сорняком следующим образом. Если сорняк и режущий инструмент рабочего органа 15 находятся на некотором расстоянии друг от друга в продольном направлении, т.е. параллельно движению робота-пропольщика, то перемещение рабочего органа 15, может выполняться работой исполнительного привода 13, или дополнительно работой двух исполнительных приводов 11, 12 одновременно, в зависимости от расстояния между сорняком и рабочим органом 15. При изменении длины исполнительного привода 13, который крепится с поперечиной 10 шарнирным узлом 14, способствует перемещению по направляющим 5 конструкции, составляющими которой являются поперечина 10, исполнительные привода 11, 12 и направляющая 6 с кареткой 8 соединенные между собой шарнирными узлами 14. Вследствие этого каретка 8 увлекает за собой жестко соединенный линейный привод 17 с двигателем постоянного тока 16 и рабочим органом 15. Выше перечисленная конструкция максимально перемещается на длину исполнительного привода 13. При изменении длин исполнительных приводов 11 и 12 одновременно работающих, способствует перемещению по направляющим 5 только направляющей 6 с кареткой 8, а также рабочего органа 15 с двигателем постоянного тока 16 и линейным приводом 17. Перемещение рабочего органа 15 в поперечном направлении, выполняется работой одного из двух исполнительных приводов 11, 12 в зависимости от расположения сорняка слева или справа.
Когда режущий инструмент рабочего органа 15 находится над сорняком, то включаются двигатель постоянного тока 16, а за ним и линейный привод (актуатор) 17, который перемещает рабочий орган 15 вертикально вниз, тем самым срезая сорняк и взрыхляя почву рядом с ним.
Таким образом, робот-пропольщик, в автоматическом режиме уничтожает сорняки в рядках и междурядьях, а также взрыхляет почву рядом с ними, обеспечивая дополнительно кислородное питание к корням культурных растений. Точечная обработка позволяет повысить качество прополки рядков и междурядий пропашных культур от сорных растений, а также снизить травмирование культурных растений.
Робот-пропольщик, содержащий раму, управляющие колеса, систему управления и навигации с контрольно-измерительными приборами, систему питания, отличающийся тем, что он дополнительно содержит три направляющие с каретками, две из которых выполнены в виде круглого стержня, а третья - прямоугольного стержня, поперечины, три исполнительных привода, рабочий орган с двигателем постоянного тока и линейным приводом, при этом две направляющие с каретками крепятся к раме посредством опор, расположенных на концах направляющих, оси которых параллельны друг другу в горизонтальной плоскости и направлены в сторону движения робота-пропольщика, а третья направляющая с кареткой и поперечина имеют жесткое крепление с каретками первой и второй направляющих, оси поперечины и третьей направляющей параллельны друг другу в горизонтальной плоскости и перпендикулярны осям первых двух направляющих, при этом первый и второй исполнительные привода крепятся с кареткой и с поперечиной по концам с одной стороны, а третий исполнительный привод по центру с поперечиной с обратной стороны и с рамой посредством шарнирных узлов с вращательной парой пятого класса, при этом рабочий орган имеет соединение с двигателем постоянного тока и линейным приводом, которые последовательно расположены вертикально друг за другом и жестко крепятся с третьей направляющей с кареткой, причем в нижней части рамы установлен датчик технического зрения.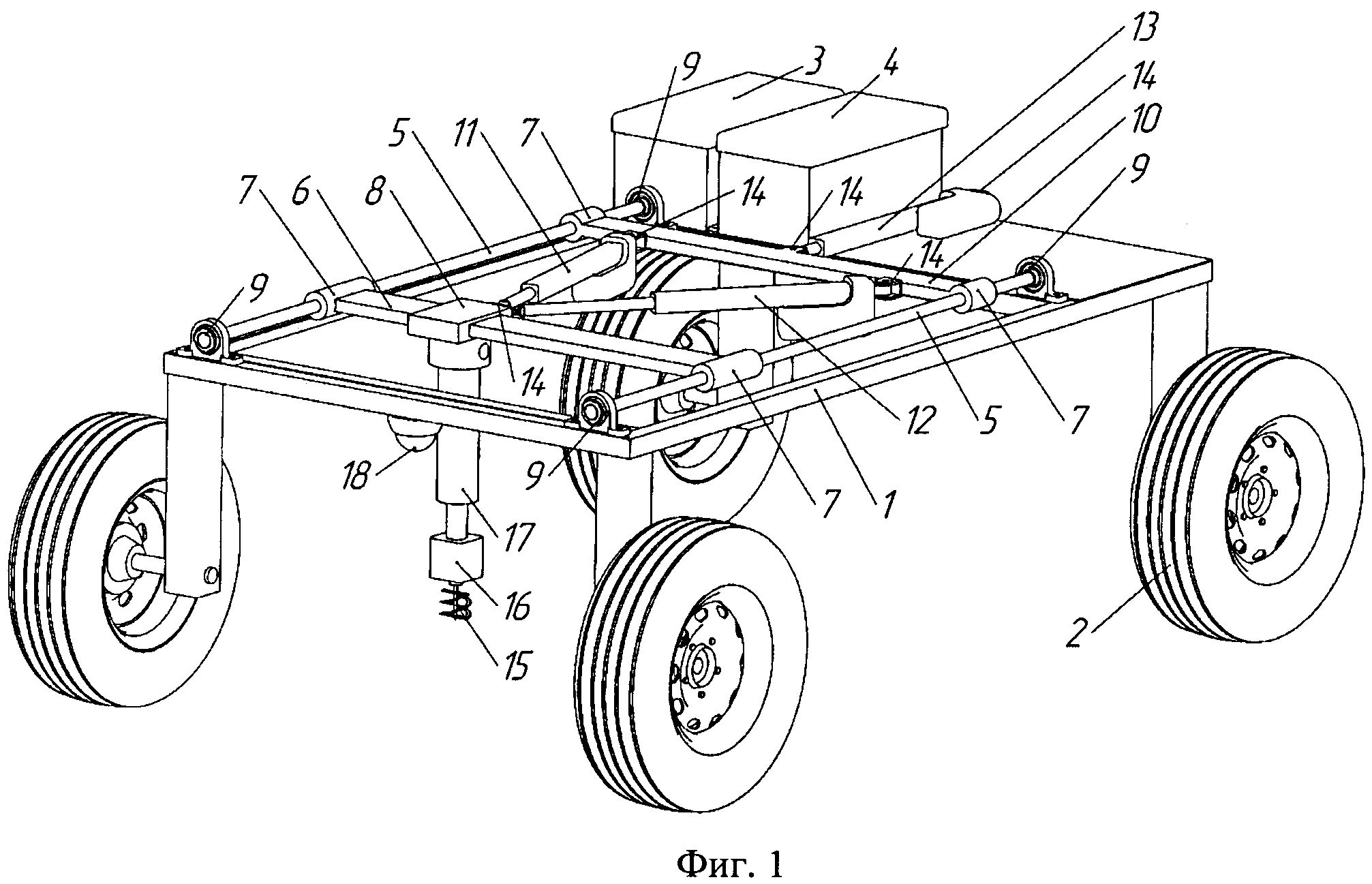
Прямоугольно-пунктирно-гнездовой способ посева
Рабочий орган плуга-глубокорыхлителя-удобрителя
Способ определения зоны почвенного питания бахчевых культур
Устройство для внесения в почву твердых органических удобрений
Кормовая добавка для молодняка овец
Корнеклубнеуборочный комбайн
Линия для дражирования опушенных семян
Комбайн для уборки корнеклубнеплодов
Корнеклубнеуборочный комбайн
Способ кормления цыплят-бройлеров
Робот-погрузчик сеток с овощами
Роботизированный комплекс для полосового опрыскивания овощных культур
Навесной вилочный погрузчик
Робот-погрузчик сеток с овощами
Система локально-внутрипочвенного орошения многолетних насаждений
Навесной вилочный погрузчик

