Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ДЛЯ РУЛЕВЫХ ПРИВОДОВ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к бортовым аналоговым и цифроаналоговым системам управления беспилотными летательными аппаратами (БПЛА), в которых используются механические рулевые приводы.
Наиболее близким к предлагаемому изобретению является способ формирования сигналов управления для рулевых приводов беспилотного летательного аппарата, содержащий прием текущих сигналов управления по курсу, крену и тангажу, измерение скорости полета летательного аппарата, кинематическое распределение сигналов управления рулевых приводов и задание номинальных значений ограничения сигналов управления [1].
Наиболее близким к предлагаемому изобретению является устройство формирования сигналов управления для рулевых приводов беспилотного летательного аппарата, содержащее три входа сигналов управления - по курсу, крену и тангажу, последовательно соединенные датчик скорости полета летательного аппарата и блок кинематического распределения сигналов, сигналы с выходов которого являются выходными сигналами устройства, и задатчик номинальных значений ограничениия сигналов управления [1].
Недостатками известных способа и устройства являются ограниченные функциональные возможности в условиях широкого спектра условий полета по высоте и скорости и ограниченная точность управления БПЛА.
Техническим результатом изобретения является расширение функциональных возможностей и повышение точности управления БПЛА.
Указанный технический результат достигается тем, что в известный способ формирования сигналов управления для рулевых приводов беспилотного летательного аппарата, содержащий прием текущих сигналов управления по курсу, крену и тангажу, измерение скорости полета М летательного аппарата, кинематическое распределение сигналов управления рулевых приводов и задание номинальных значений ограничения сигналов управления, дополнительно введены формирование модульной функции принятых сигналов управления по курсу, крену и тангажу, масштабирование сигналов управления с коэффициентом запаса Кзап.≅0,2÷0,6, формирование текущих значений ограничения сигналов управления по курсу, крену и тангажу на основе разности масштабированных значений сигналов модульной функции смежных сигналов и номинальных значений ограничения в каждом из каналов курса, крена и тангажа соответственно, и формирование текущих сигналов управления для кинематического распределения на основе разности сигналов таким образом, что при отрицательном значении разностного сигнала управления соответствующего канала ограничение сигнала управления больше номинального значения в Когр. раз, Когр.>1.
Указанный технический результат достигается также и тем, что в известное устройство формирования сигналов управления для рулевых приводов беспилотного летательного аппарата, содержащее три входа сигналов управления - по курсу, крену и тангажу, последовательно соединенные датчик скорости полета летательного аппарата и блок кинематической развязки, сигналы с выхода которого являются выходными сигналами устройства для рулевых приводов, и задатчик номинальных значений ограничения сигналов управления, дополнительно введены первый управляемый ограничитель сигнала, первый вход которого соединен со входом сигнала управления устройства по курсу, а выход с первым входом блока кинематической разводки, второй управляемый ограничитель сигнала, первый вход которого соединен со входом сигнала управления устройства по крену, а выход - со вторым входом блока кинематической разводки, третий управляемый ограничитель сигнала, первый вход которого соединен со входом сигнала управления устройства по тангажу, а выход - с третьим входом блока кинематической разводки, и задатчик текущих значений ограничения сигналов управления, первый второй и третий входы которого соединены с входами сигналов управления устройства по курсу, крену и тангажу соответственно, четвертый, пятый и шестой входы - с первым, вторым и третьим выходами задатчика номинальных значений ограничения сигналов управления соответственно, первый второй и третий входы блока кинематической разводки соединены с выходом первого, второго и третьего управляемых ограничителей сигнала соответственно.
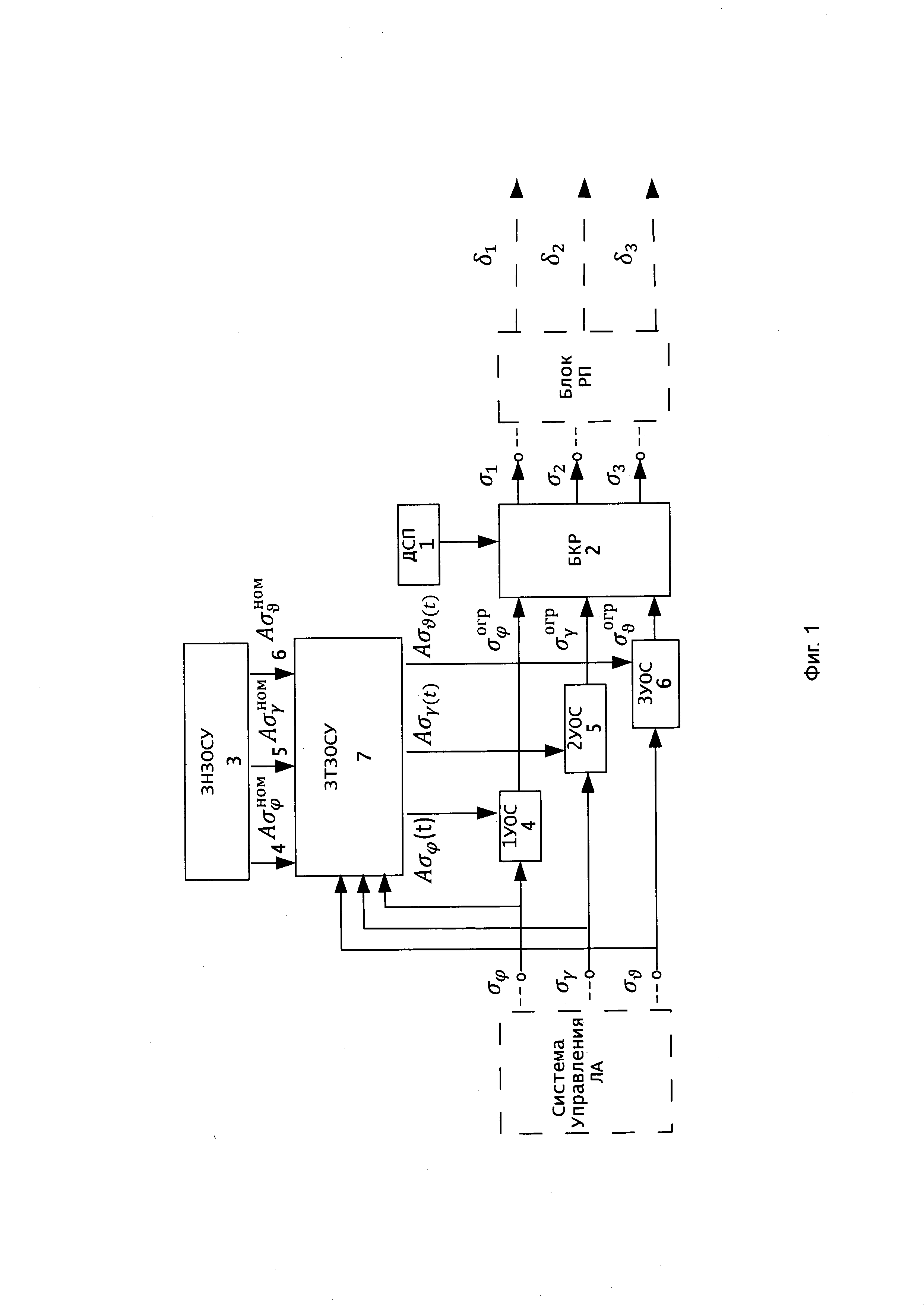
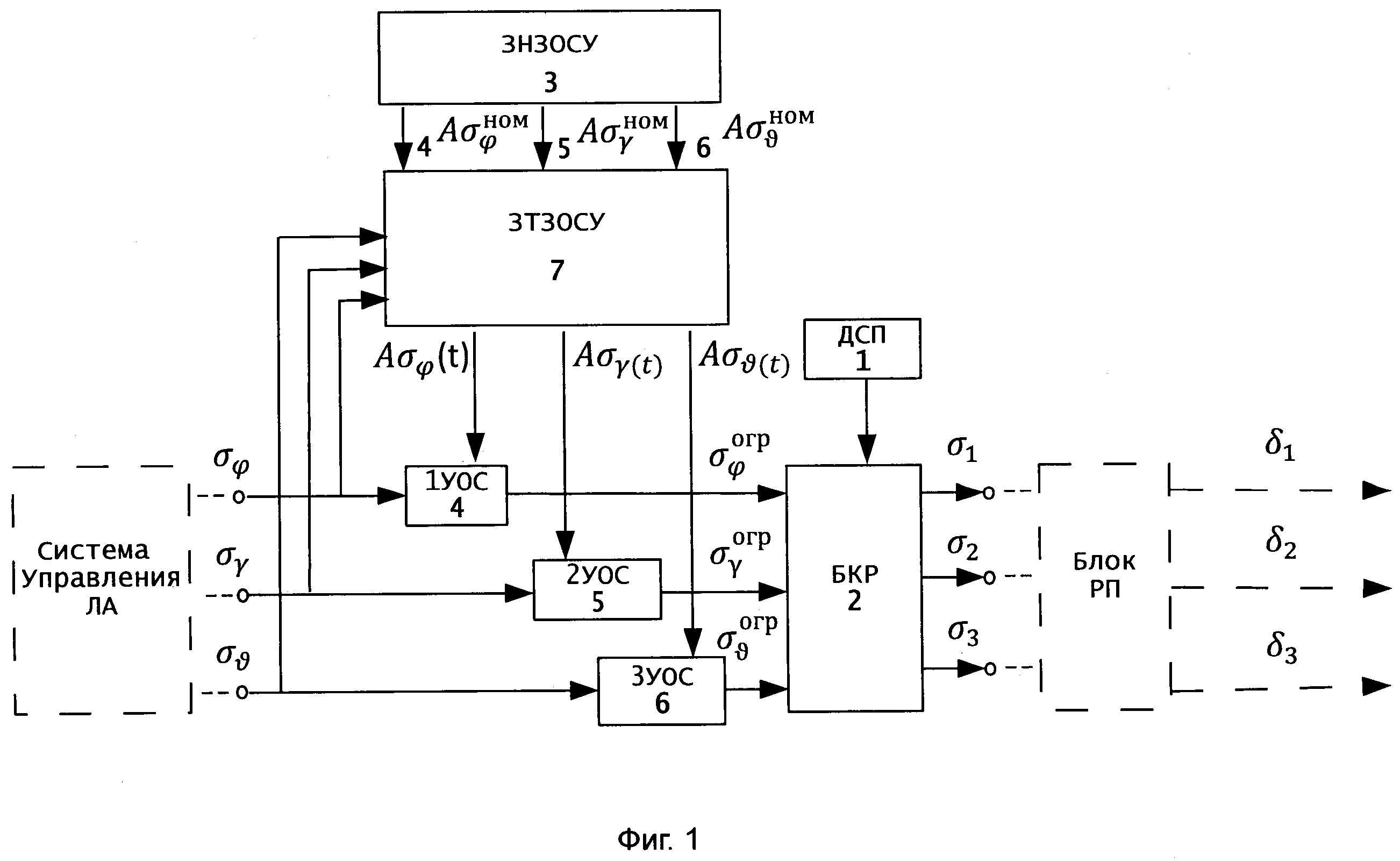
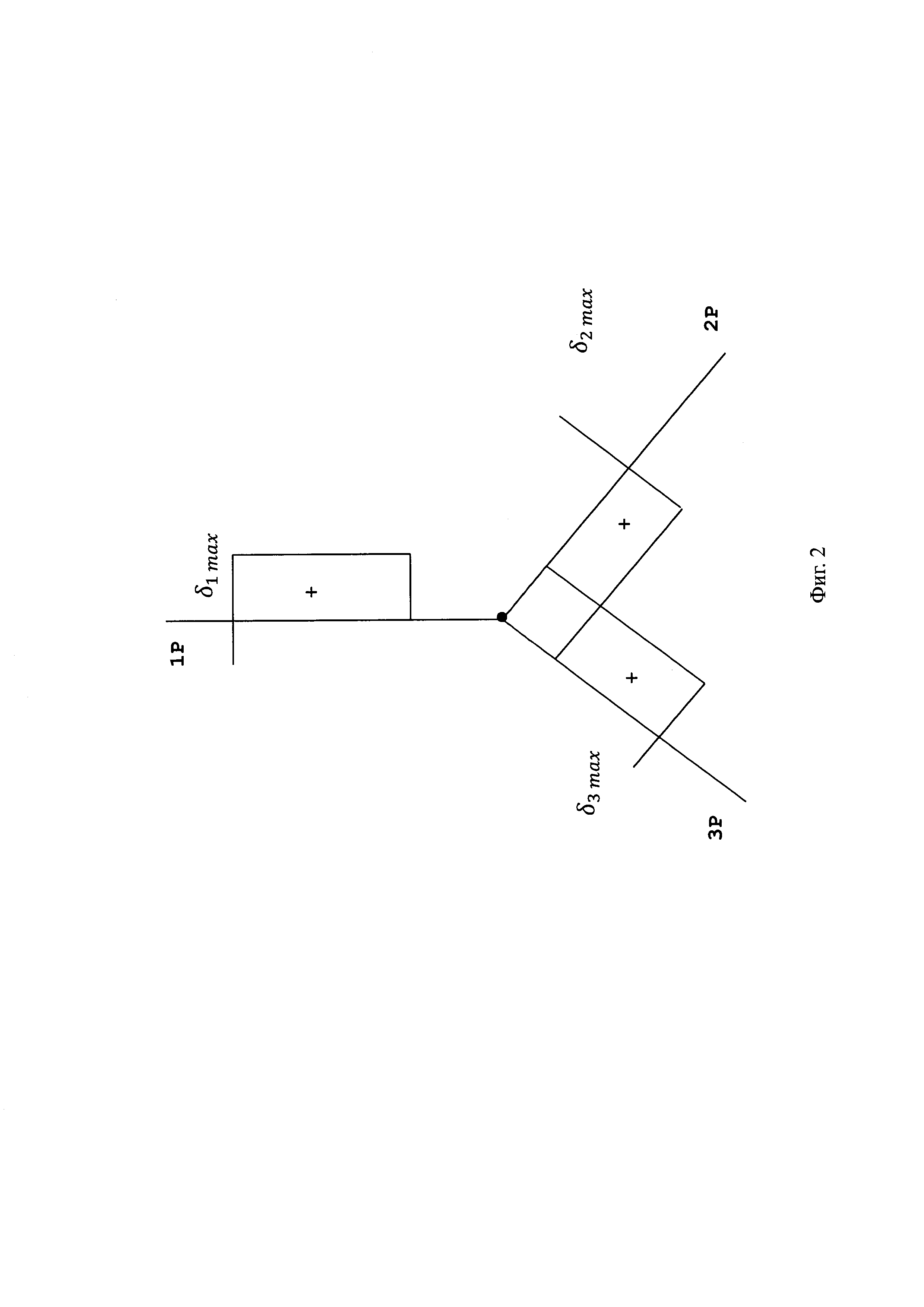
На фиг. 1 представлена структурно-функциональная схема устройства формирования сигналов управления для рулевых приводов беспилотного летательного аппарата, на фиг. 2 - схема расположения рулей, на фиг. 3 - блок-схема задатчика 7 для каналов курса, крена и тангажа.
Устройство формирования сигналов управления для рулевых приводов беспилотного летательного аппарата (фиг. 1) содержит три входа сигналов управления - по курсу, крену и тангажу, последовательно соединенные датчик скорости полета 1 (ДСП) летательного аппарата и блок кинематического распределения сигналов 2 (БКР), сигналы с выхода которого являются выходными сигналами устройства, и задатчик номинальных значений ограничения сигналов управления 3 (ЗНЗОСУ), первый управляемый ограничитель сигнала 4 (1УОС), первый вход которого соединен со входом сигнала управления устройства по курсу, а выход с первым входом блока кинематического распределения сигналов 2, второй управляемый ограничитель сигнала 5 (2УОС), первый вход которого соединен со входом сигнала управления устройства по крену, а выход - со вторым входом блока кинематического распределения сигналов 2, третий управляемый ограничитель сигнала 6 (3УОС), первый вход которого соединен со входом сигнала управления устройства по тангажу, а выход - с третьим входом блока кинематического распределения сигналов 2, и задатчик текущих значений ограничения сигналов управления 7 (ЗТЗОСУ), первый, второй и третий входы которого соединены с входами сигналов управления устройства по курсу, крену и тангажу соответственно, четвертый, пятый и шестой входы - с первым, вторым и третьим выходами задатчика номинальных значений ограничения сигналов управления 3 соответственно, первый второй и третий входы блока кинематического распределения сигналов 2 соединены с выходом первого 4, второго 5 и третьего 6 управляемых ограничителей сигнала соответственно.
Устройство формирования сигналов управления для рулевых приводов беспилотного летательного аппарата работает следующим образом.
Задающими сигналами для рулевых приводов являются сигналы σϕ, σγ, σϑ по курсу, крену и тангажу, соответственно, поступающие от системы управления - показано пунктиром. Указанные сигналы поступают на первый 4 (1УОС), второй 5 (2УОС) и третий 6 (3УОС) управляемые ограничители сигналов соответственно, с выхода которых снимаются соответствующие ограниченные сигналы  поступающие на блок кинематического распределения сигналов 2.
поступающие на блок кинематического распределения сигналов 2.
Обозначенный на фиг. 1 блок кинематического распределения сигналов 2 - определяет функции распределения сигналов  для рулевых приводов РП1, РП2 и РП3.
для рулевых приводов РП1, РП2 и РП3.
Первый руль 1Р (фиг. 2) участвует в отработке сигналов управления по курсу и крену, второй 2Р и третий 3Р рули участвуют в отработке сигналов управления всех каналов.
С выхода блока 2 сигналы σ1, σ2, σ3 поступают на рулевые приводы (РП) - блок РП показан пунктиром - которые их отрабатывают, отклоняя рули на δ1, δ2, δ3. Знаком + отмечены положительные отклонения рулей. При этом максимальные значения отклонения рулей δ2 max=δ3 max.
Датчик скорости полета 1 БПЛА выдает сигнал скорости в числах Маха на блок 2 для инвариантного распределения сигналов в соответствии с [2]. Ограничители 4, 5, 6 ограничивают сигналы σϕ, σγ, σϑ на основе номинальных значений ограничения  в задатчике 3 и сравнения их с текущими уровнями соответствующих сигналов σϕ, σγ, σϑ. Указанное сравнение производится в каждом канале управления по сравнению с сигналом модульной функции (фиг. 3) смежных каналов для более оптимального с точки зрения распределения ограничений при недозагруженности смежных каналов управления.
в задатчике 3 и сравнения их с текущими уровнями соответствующих сигналов σϕ, σγ, σϑ. Указанное сравнение производится в каждом канале управления по сравнению с сигналом модульной функции (фиг. 3) смежных каналов для более оптимального с точки зрения распределения ограничений при недозагруженности смежных каналов управления.
Такое исполнение позволяет достаточно оптимально соотнести предельные максимальные уровни отрабатываемых сигналов всех каналов управления БПЛА с текущими уровнями отклонений рулевых приводов δj, где j=1, 2, 3.
При этом сравнение текущих сигналов управления с их номинальными значениями производится с коэффициентом запаса меньше 1, а увеличение значения ограничения с коэффициентом усиления больше 1, но не более соотношения  для канала курса,
для канала курса,  для каналов крена и тангажа.
для каналов крена и тангажа.
Ограничения сигналов управления играют важную роль и требуют корректности при совместном задействовании каналов [2] с учетом предлагаемого вариирования ограничений.
На основе изложенного кинематическая разводка сигналов управления имеет вид



где ki - инвариантные коэффициенты, определенные в [2].
Эквивалентные отклонения рулей σϕ, σγ, σϑ с учетом 1а, 1б, 1в в обратном пересчете с учетом положения σi=δj имеют вид:

При этом определены максимальные значения отклонений (расхода) рулей δ1 max, δ2 max и δ3 max.
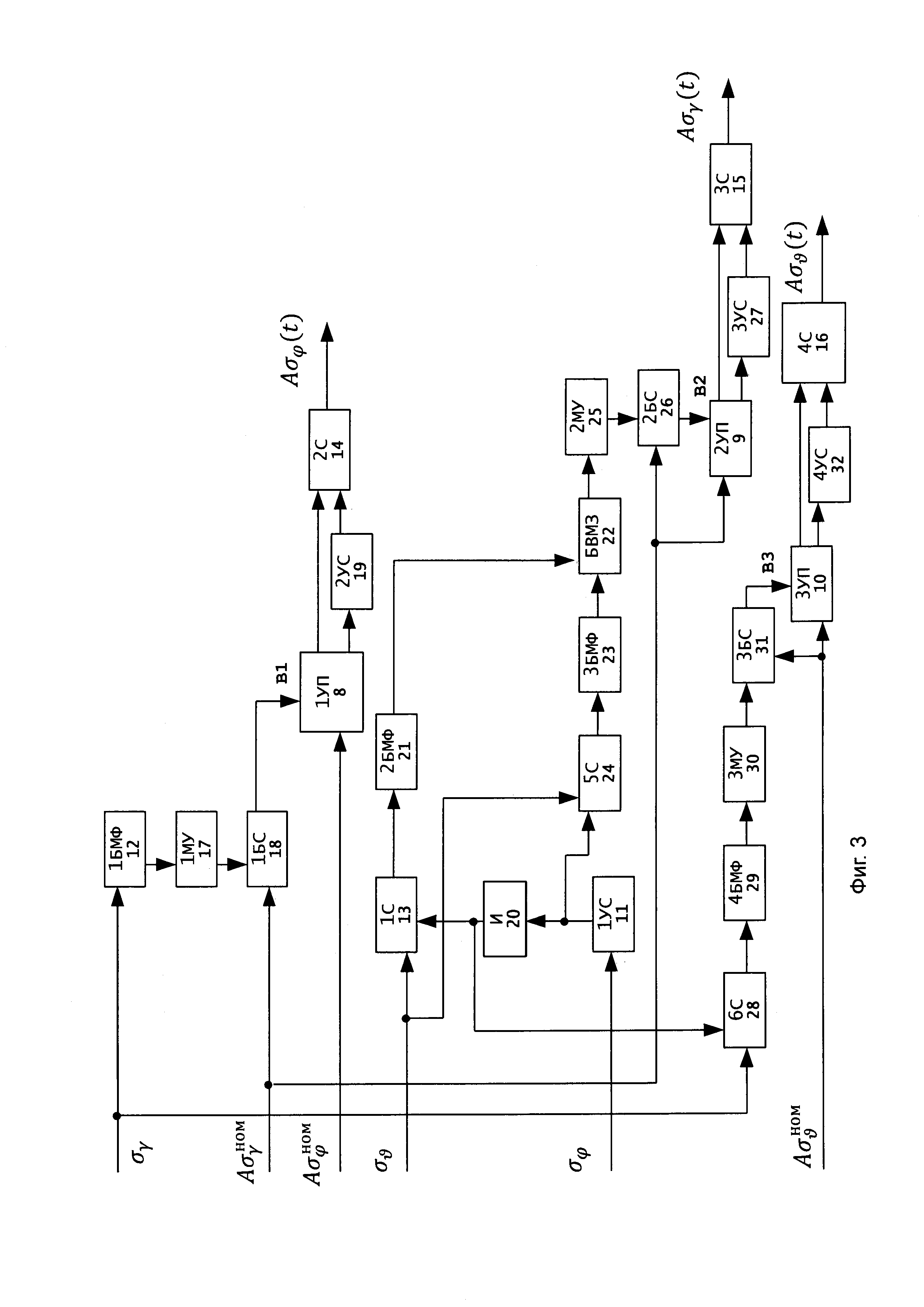
На фиг. 3 представлена блок-схема задатчика 7 для каналов курса, крена и тангажа.
Входными сигналами ограничений для задатчика 7 являются:
-  - для канала курса, поступающий на первый управляемый переключатель 8 (1УП);
- для канала курса, поступающий на первый управляемый переключатель 8 (1УП);
-  - для канала крена, поступающий на второй управляемый переключатель 9 (2УП);
- для канала крена, поступающий на второй управляемый переключатель 9 (2УП);
-  - для канала тангажа, поступающий на третий управляемый переключатель 10 (3УП).
- для канала тангажа, поступающий на третий управляемый переключатель 10 (3УП).
Также на задатчик 7 поступают текущие сигналы управления:
- σϕ - для канала курса - на первый усилитель 11 (1УС);
-σγ - для канала крена - на первый блок модульной функции 12 (1БМФ);
- σϑ - для канала тангажа - на первый сумматор 13 (1С).
Выходными сигналами задатчика 7 являются:
-  - для канала курса - с выхода второго сумматора 14 (2С);
- для канала курса - с выхода второго сумматора 14 (2С);
-  - для канала крена - с выхода третьего сумматора 15 (3С);
- для канала крена - с выхода третьего сумматора 15 (3С);
-  - для канала тангажа - с выхода четвертого сумматора 16 (4С).
- для канала тангажа - с выхода четвертого сумматора 16 (4С).
Функционирование задатчика 7 в соответствии с фиг. 3 и соотношениями (1а), (1б) и (1в) производится следующим образом.
По каналу курса.
Базовым соотношением принято (1а).
Сформированный блоком 12 сигнал модульной функции |σγ| масштабируется с коэффициентом запаса, учитывающим и коэффициент kγ по [2] и эмпирически составляющем 0,2÷0,6 в первом масштабном усилителе 17 (1МУ), откуда поступает на первый блок сравнения 18 (1БС), в котором сравнивается с входным сигналом  . При отрицательной разности сигналов
. При отрицательной разности сигналов  и масштабированного блоком 17, блоком 18 выделяется сигнал В1, который переключает переключатель 8, переводя цепь сигнала
и масштабированного блоком 17, блоком 18 выделяется сигнал В1, который переключает переключатель 8, переводя цепь сигнала  с собственного значения на второй усилитель сигнала 19 (2УС) с коэффициентом усиления больше 1, но не более соотношения
с собственного значения на второй усилитель сигнала 19 (2УС) с коэффициентом усиления больше 1, но не более соотношения  , и эмпирически составляющего 1,2÷1,6. Оба сигнала поступают на второй сумматор 14, выходом которого является сигнал
, и эмпирически составляющего 1,2÷1,6. Оба сигнала поступают на второй сумматор 14, выходом которого является сигнал 
Таким образом, сформирован выходной сигнал текущего значения ограничения сигнала управления по курсу.
По каналу крена.
Базовыми соотношениями приняты (1б) и (1в).
Усиленный на усилителе 11 по условию инвариантности [2] сигнал σϕ далее инвертируется инвертором 20 (И) и поступает в сумматор 13 вместе с сигналом σϑ. Во втором блоке модульной функции 21 (2БМФ) выделяется модуль суммарного сигнала, подаваемый в блок выделения максимального значения 22 (БВМЗ), вторым сигналом для которого является сигнал третьего блока модульной функции 23 (3БМФ), сформированный пятым сумматором 24 (5С) по сигналам σϑ и усиленным на усилителе 11 сигнала σϕ.
Сформированный блоком 22 сигнал максимального значения масштабируется вторым масштабным усилителем 25 (2МУ) с эмпирическим коэффициентом 0,2÷0,6 и поступает на второй блок сравнения 26 (2БС), на второй вход которого поступает сигнал  . При отрицательной разности масштабированного сигнала и сигнала
. При отрицательной разности масштабированного сигнала и сигнала  выделяется сигнал В2 и переключается второй управляемый переключатель 9, переводя цепь сигнала
выделяется сигнал В2 и переключается второй управляемый переключатель 9, переводя цепь сигнала  с собственного значения на третий усилитель сигнала 27 (3УС) с коэффициентом усиления больше 1, но не более соотношения
с собственного значения на третий усилитель сигнала 27 (3УС) с коэффициентом усиления больше 1, но не более соотношения  , и эмпирически составляющего 1,2÷1,6.
, и эмпирически составляющего 1,2÷1,6.
Таким образом, на третий сумматор 15 поступают оба эти сигнала, а выходом его является выходной сигнал текущего значения ограничения сигнала управления по крену 
По каналу тангажа.
Базовыми соотношениями приняты (1б) и (1в).
На шестой сумматор 28 (6С) поступает сигнал σγ и сигнал с выхода инвертора 20, из выходного сигнала которого формируется сигнал модульной функции блоком 29 (4БМФ) с масштабным усилением в третьем масштабном усилителе 30 (3МУ) с эмпирическим коэффициентом 0,2÷0,6. В третьем блоке сравнения 31 (3БС) выделяется разность между полученным сигналом блока 30 и входным сигналом  . При отрицательной разности блок 31 выдает сигнал В3 на третий управляемый переключатель 10, переводя цепь сигнала
. При отрицательной разности блок 31 выдает сигнал В3 на третий управляемый переключатель 10, переводя цепь сигнала  с номинального значения на усиленное в четвертом усилителе 32 (4УС) с коэффициентом усиления больше 1, но не более соотношения
с номинального значения на усиленное в четвертом усилителе 32 (4УС) с коэффициентом усиления больше 1, но не более соотношения  , и эмпирически составляющего 1,2÷1,6. Оба сигнала поступают на четвертый сумматор 16, выходом которого является сигнал
, и эмпирически составляющего 1,2÷1,6. Оба сигнала поступают на четвертый сумматор 16, выходом которого является сигнал 
Рулевые приводы отрабатывают аналоговые управляющие сигналы σi с учетом функционального изменения ограничений.
Способ и устройство управления несложно реализуется алгоритмически, все звенья и блоки могут быть также реализованы на стандартных элементах автоматики и вычислительной техники, например, по [3], а также в виде цифроаналогового исполнения.
Предложенный способ позволяет расширить функциональные возможности и повысить точность управления БПЛА.
Источники информации
1. Патент РФ №2251136, G05D 1/08, 2005.
2. A.M. Пучков. Критерии и метод расчета ограничений распределяемых сигналов управления рулевыми приводами ЛА. М., Вестник Московского авиационного института №6, том 18, 2009 г., с. 49-54.
3. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М., Машиностроение, 1981, с. 107, 126.
Способ управления ориентацией солнечной батареи космического аппарата с защитой от кратковременных сбоев информации об угловом положении солнечной батареи
Способ управления ориентацией солнечной батареи космического аппарата с контролем направления вращения и непрерывности изменения информации углового положения солнечной батареи
Способ управления ориентацией солнечной батареи космического аппарата с ограничением угла поворота солнечной батареи
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ измерения вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата и устройство для его осуществления
Двухканальное устройство координированного управления летательным аппаратом
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ измерения вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата и устройство для его осуществления
Двухканальное устройство координированного управления летательным аппаратом
Способ ориентации космического аппарата и устройство для его реализации
Многорежимное цифроаналоговое устройство управления угловым движением по тангажу беспилотного летательного аппарата
Модернизированное адаптивное устройство координированного управления летательным аппаратом
Способ ориентации космического аппарата по углу крена и устройство для его реализации

