Способ измерения скорости судна доплеровским лагом
Вид РИД
Изобретение
Изобретение относится к области кораблевождения, а именно к способам и устройствам измерения скорости судна доплеровским методом.
Одним из условий безопасного кораблевождения является постоянный контроль абсолютной (относительно дна) скорости судна с использованием доплеровского лага (ДЛ) [1-6].
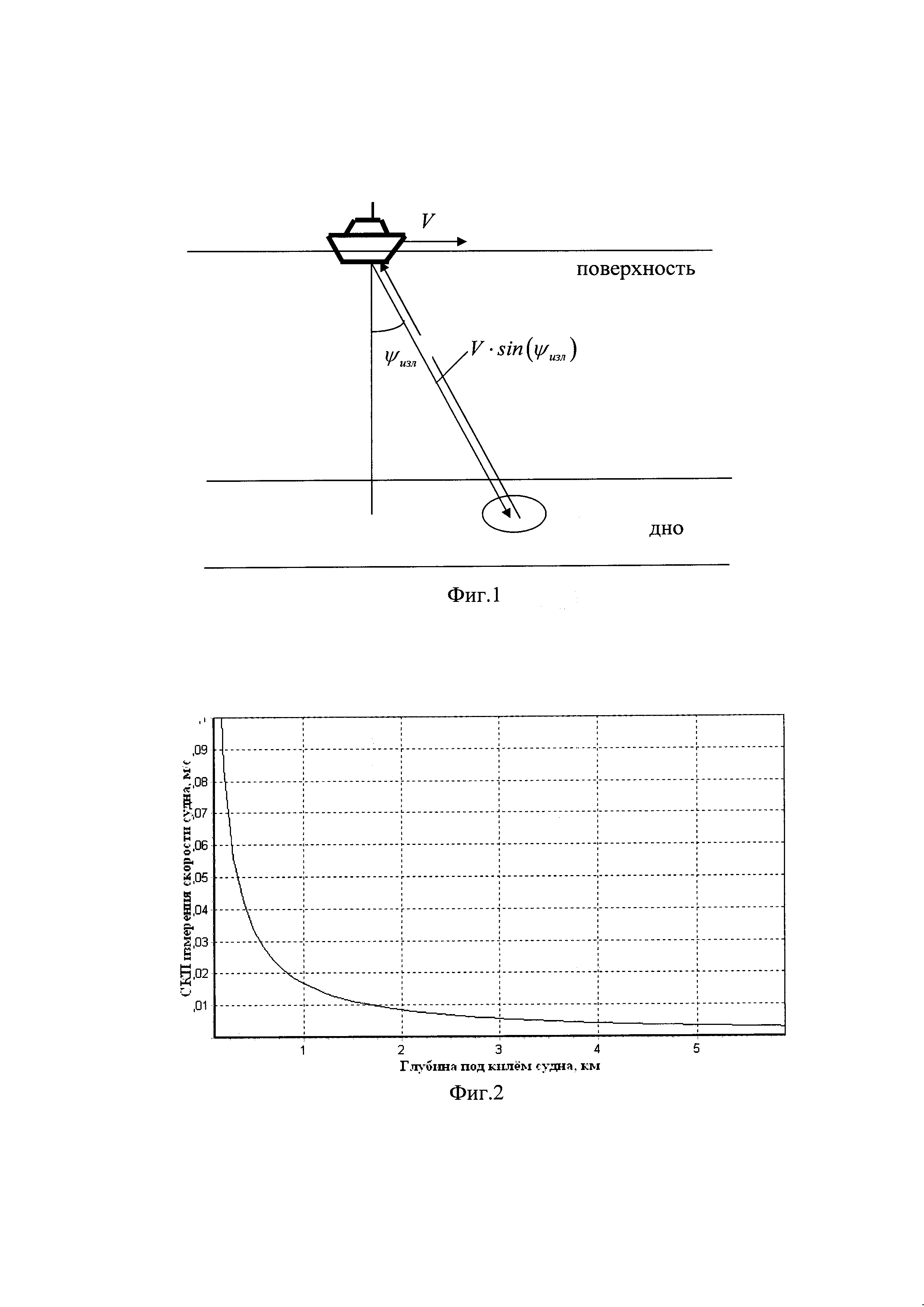
Физическим принципом, заложенным в работу ДЛ, является измерение доплеровского сдвига частоты эхосигнала (ЭС), отраженного от дна, относительно частоты излученного тонального зондирующего сигнала (ЗС) (фиг. 1). Этот сдвиг частот несет в себе информацию о скорости судна в соответствии с формулой [1]:

где
ƒЗС - частота ЗС, Гц;
ƒЭС - частота ЭС, Гц;
V - скорость судна, м/с;
ψизл - угол между направлением излучения ЗС и направлением вертикально вниз, град;
ψnp - угол между направлением прихода ЭС и направлением вертикально вниз, град;
Czν - скорость звука в воде в месте расположения приемно-излучающей антенны, м/с.
Из (1) следует, что скорость судна может быть вычислена по формуле

Поскольку значения параметров ƒЗC и ψизл считаются известными и ψnp ≈ ψизл для определения скорости судна нужно измерить и Czν и ƒЭС и по формуле (2) вычислить скорость судна. Точность измерения скорости судна в основном определяется точностью измерения частоты ЭС в соответствие с формулой [1]:

где  - среднеквадратические погрешности (СКП) измерения скорости судна и частоты ЭС, соответственно.
- среднеквадратические погрешности (СКП) измерения скорости судна и частоты ЭС, соответственно.
СКП измерения частоты ЭС в частотной области вычисляется по формуле [1]:

где ТЗС - длительность ЗС, с.
Из формулы (4) следует, что СКП измерения частоты ЭС обратно пропорциональна длительности ЗС. Следовательно, для повышения точности измерения частоты ЭС длительность ЗС необходимо выбирать максимально возможной. Верхним пределом длительности ЗС является время распространения сигнала до дна и обратно за вычетом времени переходных процессов. Работа [1] рекомендует длительность ЗС рассчитывать по формуле:

где Н - глубина под килём судна.
На фиг. 2 приведена зависимость СКП измерения скорости судна от глубины под килём при отсутствии качки судна, рассчитанная для типового случая (ƒЗС=22,5 кГц; ψизл=350; Czν=1500) по формуле (3) с учетом формул (4) и (5). Из рассмотрения графика (фиг. 2) следует, что на глубинах более 0,1 км СКП измерения скорости не превышает 0,1 м/с.
Однако все приведенные выше формулы и оценки справедливы для случая отсутствия качки судна.
Негативное влияние качки судна (главным образом, бортовой) на измерение его скорости проявляется в следующем:
1) в возможной потере контакта с дном, что имеет место, когда направление прихода ЭС не попадает в характеристику направленности (ХН) антенны;
2) в нарушении симметрии относительно горизонта направлений излучения ЗС и приема ЭС;
3) в изменении направления излучения ЗС и приема ЭС на интервале длительности ЗС.
В первом случае проблема решается путем приема ЭС на плотно заполненный веер ХН [7].
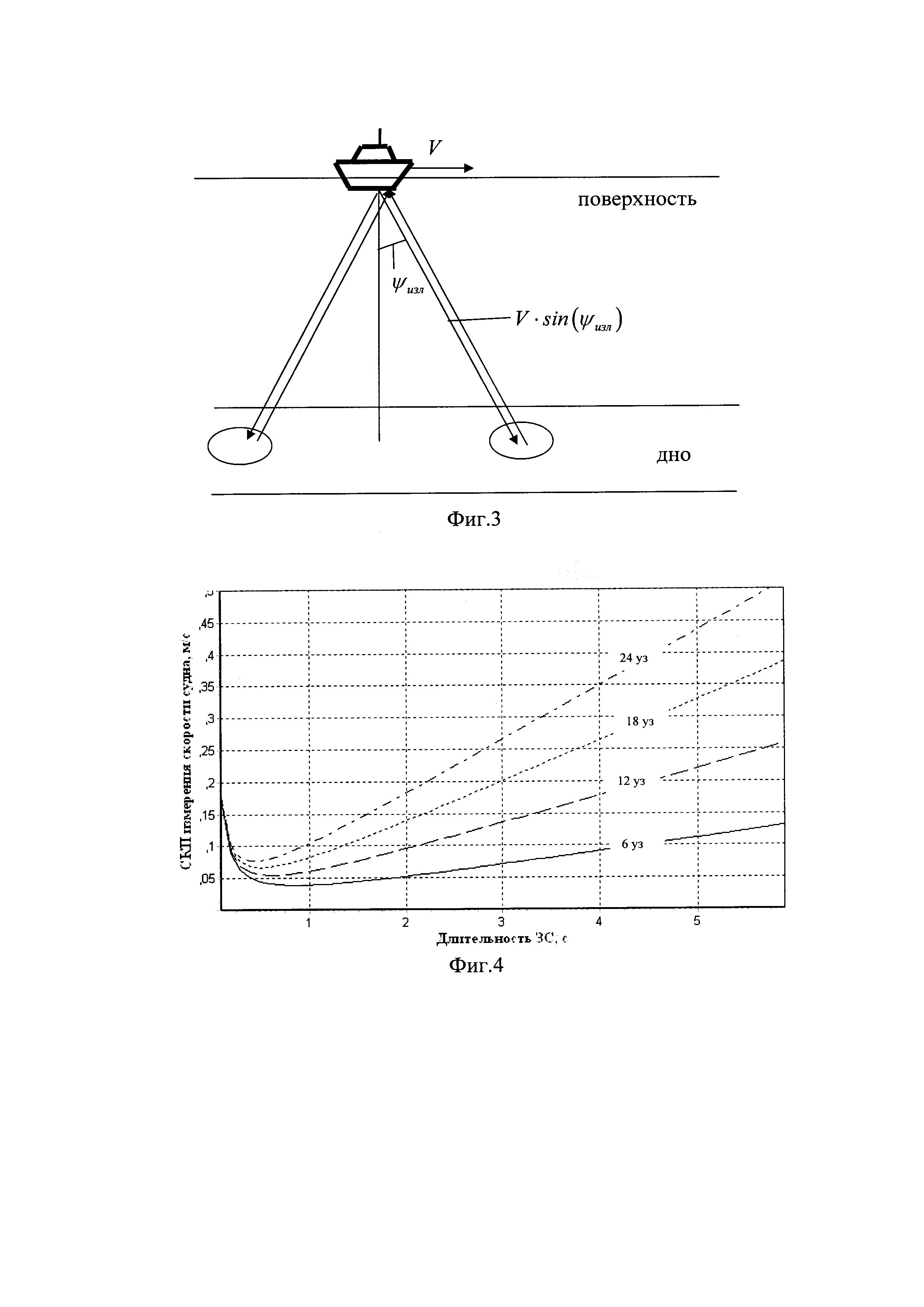
Во втором случае негативное влияние устраняется применением схемы "Янус", при которой одновременно формируются две симметричные и ориентированные в противоположные стороны характеристики направленности приемно-излучающей антенны (фиг. 3) [1, 2].
В третьем случае негативное влияние проявляется в расширении спектра ЭС вследствие качки, что ведет к снижению точности измерения его частоты и, в конечном счете, скорости судна. Оценим этот эффект количественно.
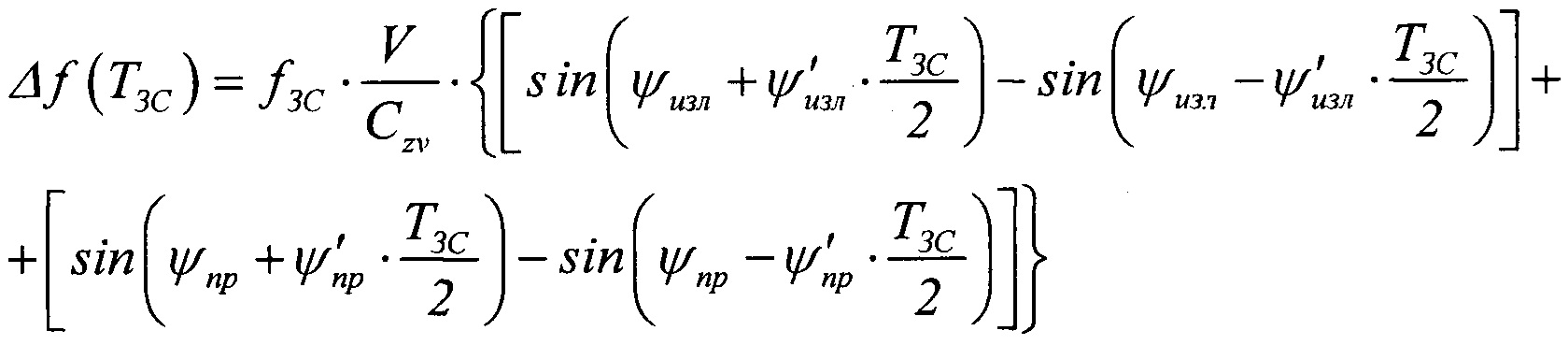
Формула (1) при изменении углов ψизл и ψnp на интервале длительности ЗС (при V << Czν) примет вид [1]:

где t - время, отсчитываемое от момента начала (t=0) до момента окончания (t=ТЗС) приема ЭС.
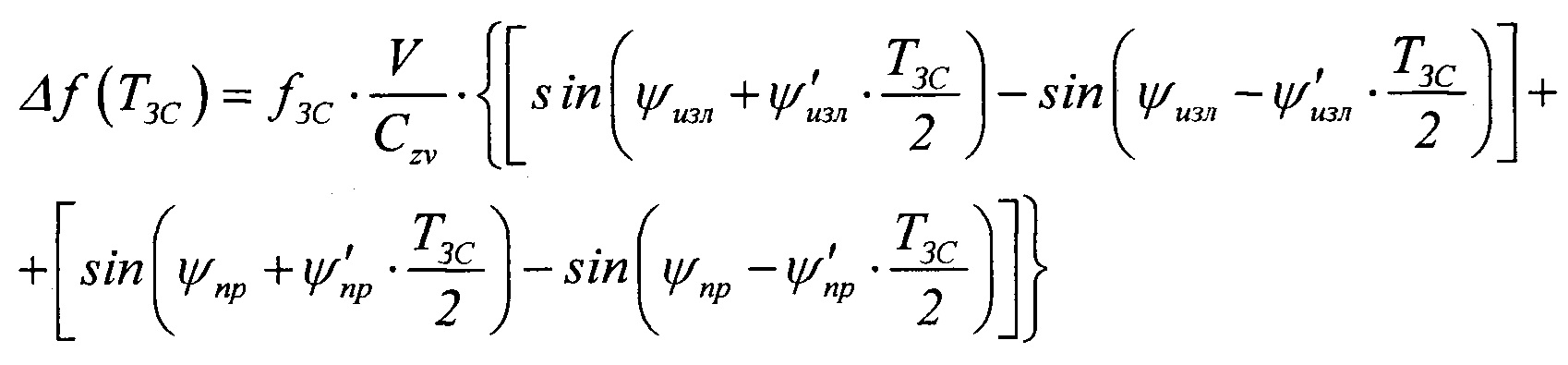
Из формулы (6) следует, что расширение спектра ЭС Δƒ(ТЗС) в зависимости от длительности ЗС можно вычислить следующим образом:
где ƒЭС (0), ƒЭС (ТЗС) - частоты ЭС в моменты начала и окончания приема ЭС;
 - скорость изменения угла крена в процессе излучения ЗС и приема ЭС соответственно. (Изменение угла дифферента не рассматривается, поскольку килевая качка, как правило, существенно меньше бортовой).
- скорость изменения угла крена в процессе излучения ЗС и приема ЭС соответственно. (Изменение угла дифферента не рассматривается, поскольку килевая качка, как правило, существенно меньше бортовой).
С учетом расширения спектра ЭС вследствие качки формула (4) принимает вид

Подставляя формулу (8) в формулу (3) получим:

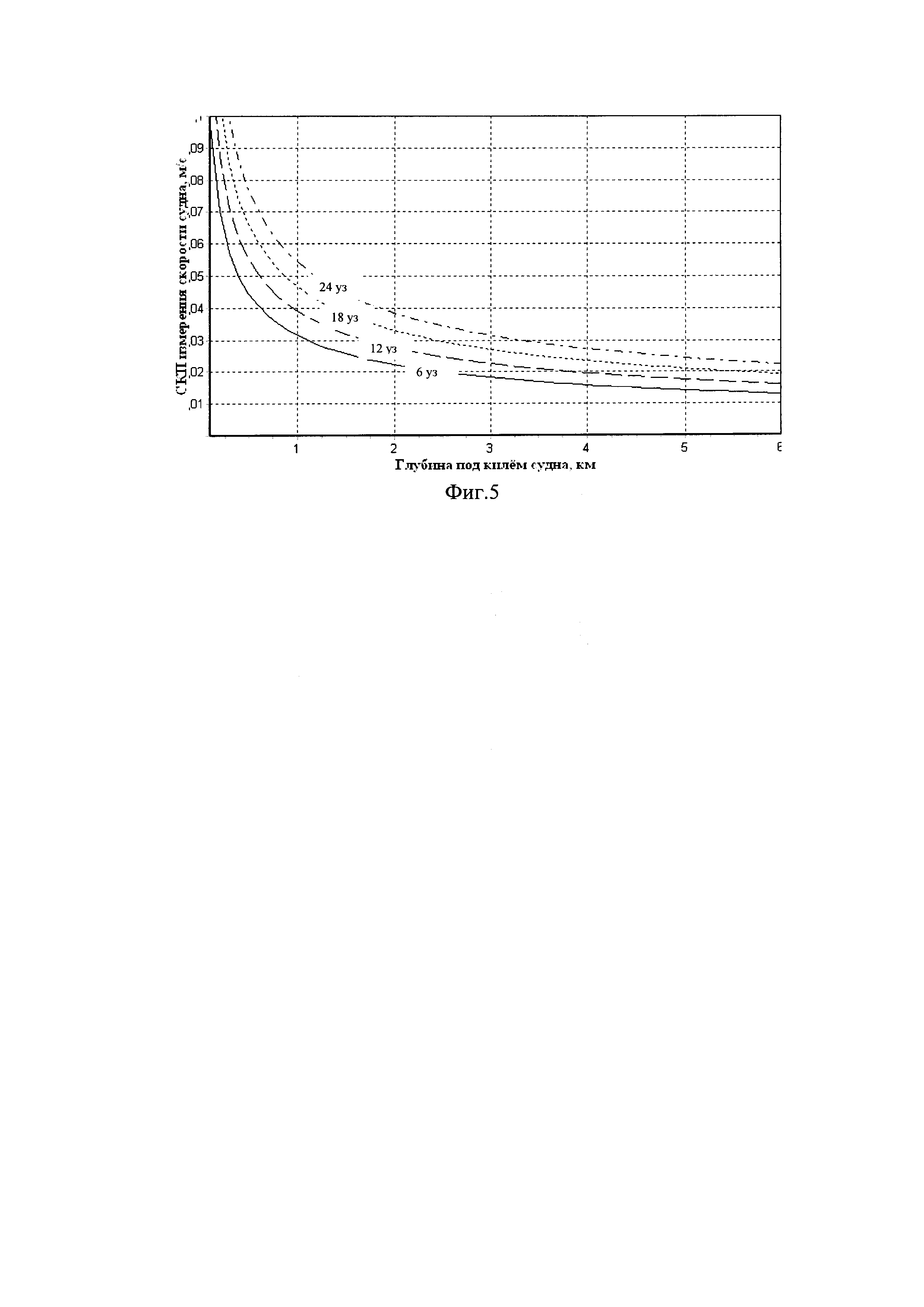
На фиг. 4 приведена рассчитанная для типовых случаев (V=6-24 уз; ƒЗС=22,5 кГц; ψизл=350;  Czν=1500) по формуле (9) зависимость СКП измерения скорости судна от длительности ЗС. Параметром графиков является скорость судна, которая, как видно из формулы (7), пропорционально влияет на расширение спектра ЭС при наличии качки судна.
Czν=1500) по формуле (9) зависимость СКП измерения скорости судна от длительности ЗС. Параметром графиков является скорость судна, которая, как видно из формулы (7), пропорционально влияет на расширение спектра ЭС при наличии качки судна.
Из рассмотрения графиков фиг. 4 следует, что при увеличении длительности ЗС СКП измерения скорости судна сначала уменьшается, а затем возрастает, что является следствием того, что первое слагаемое в скобках в формуле (8) при увеличении длительности ЗС уменьшается, а второе слагаемое, наоборот, возрастает. Минимум СКП измерения скорости судна имеет место (в зависимости от скорости судна) при длительности ЗС в интервале от 0,3 с до 0,8 с.
Из графиков фиг. 4 также следует, что СКП измерения скорости судна на качке при всех значениях длительности ЗС существенно больше, чем в случае отсутствия качки (фиг. 2), что диктует необходимость поиска технических решений, обеспечивающих уменьшение СКП измерения скорости в условиях качки.
В качестве прототипа выберем способ измерения скорости судна доплеровским лагом по патенту [7], включающий излучение под наклоном ко дну тонального зондирующего сигнала, формирование для приема эхосигнала, отраженного от дна, двумерного веера характеристик направленности, перекрывающего сектор телесных углов, в котором в условиях бортовой и килевой качек на волнении возможен приход эхосигнала, отраженного от дна, обнаружение отраженного от дна эхосигнала, измерение частоты обнаруженного эхосигнала, с использованием которой вычисление скорости судна.
Решаемая техническая проблема - повышение эксплуатационных характеристик доплеровского лага.
Технический результат - повышение точности измерения скорости судна в условиях качки.
Существо предлагаемого способа состоит:
1) в выборе длительности ЗС ТЗС, соответствующей при текущих значениях скорости изменения угла крена, скорости судна и глубины под килём минимуму СКП измерения скорости судна, рассчитываемой по формуле (9);
2) в излучении на одном цикле измерения скорости судна не одного ЗС, а последовательности из следующих друг за другом с интервалом, равным длительности ЗС ТЗС, NЗC ЗС, количество которых определяется по формуле

с последующим осреднением измеренных частот всех NЗC ЭС.
СКП измерения скорости судна в результате предложенных технических решений определится по формуле:
где Δƒ (ТЗС) вычисляется по формуле (7).
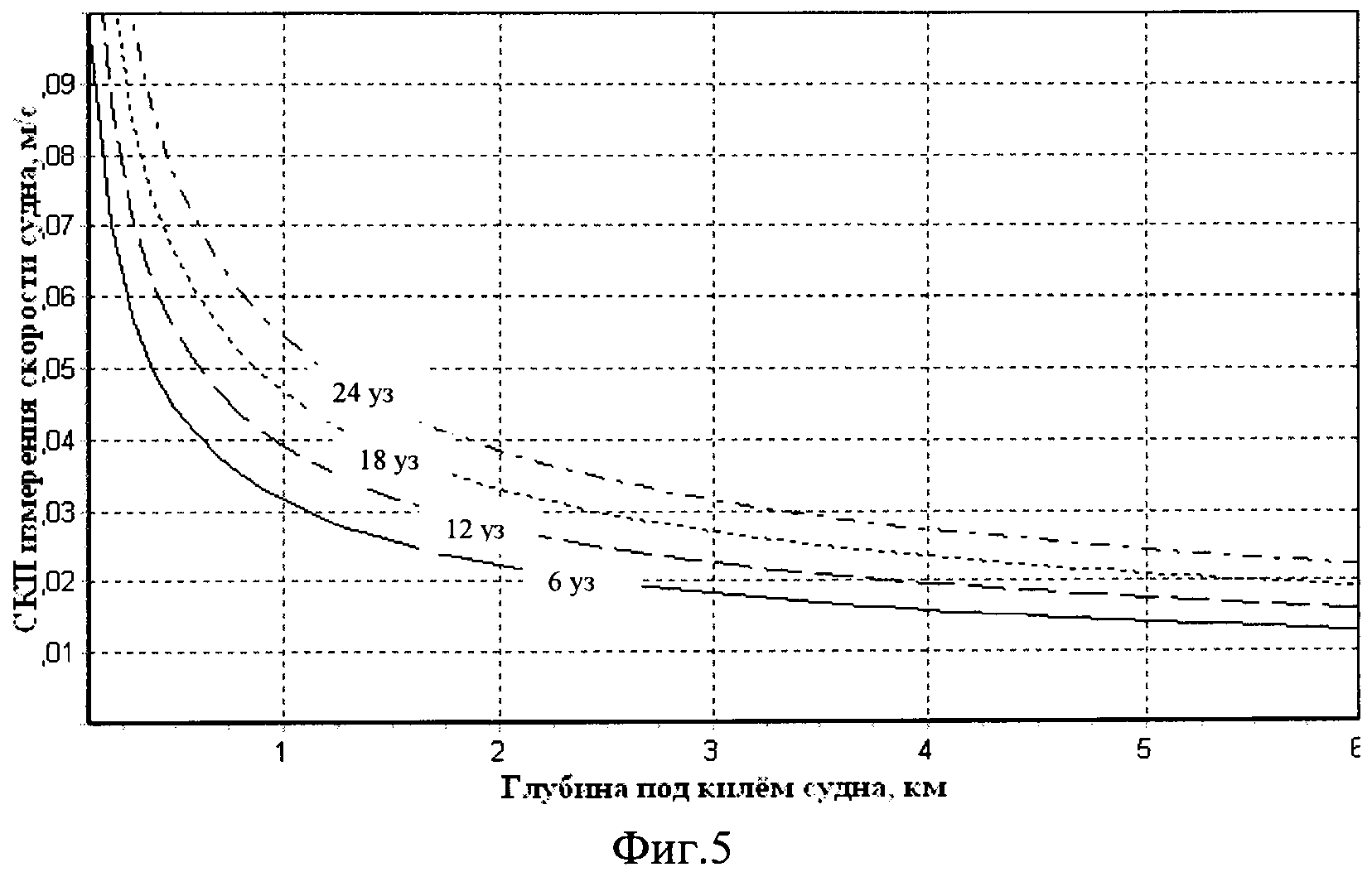
На фиг. 5 приведена рассчитанная по формуле (11) для типовых случаев (V=6-24 уз; ƒЗС=22,5 кГц; ψ=350;  Czν=1500) и TЗС=0,5 с зависимость СКП измерения скорости судна от глубины под килём. Количество NЗC излученных ЗС на одном цикле измерения скорости судна для рассматриваемых типовых случаев составляет от одного при глубинах под килём менее 1,5 км до четырех при глубине под килём 6 км.
Czν=1500) и TЗС=0,5 с зависимость СКП измерения скорости судна от глубины под килём. Количество NЗC излученных ЗС на одном цикле измерения скорости судна для рассматриваемых типовых случаев составляет от одного при глубинах под килём менее 1,5 км до четырех при глубине под килём 6 км.
Из рассмотрения графиков фиг. 5 и сравнения их с графиками фиг. 2 следует, что при применении названных выше технических решений СКП измерения скорости судна в условиях наличия качки незначительно отличается от СКП измерения скорости судна при отсутствии качки.
Таким образом, заявленный технический результат - повышение точности измерения скорости судна в условиях качки - можно считать достигнутым.
Физическая реализуемость заявляемого метода подтверждена выполненной разработкой и испытаниями доплеровского лага.
Источники информации:
1. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А. Абсолютные и относительные лаги // Л.; Судостроение, 1990.
2. Хребтов А.А., Виноградов К.А., Кошкарев В.Н., и др. Судовые измерители скорости // Л.; Судостроение, 1978.
3. Гидроакустические навигационные средства. Под ред. В.В. Богородского. // Л.: Судостроение, 1983. 262 с.
4. Богородский В.В., Гидроакустическая техника исследования и освоения океана //Л.; Гидрометиздат, 1984.
5. Виноградов К.А., Новиков И.А., Гидроакустические навигационные системы и средства // ГНИНГИ МО РФ, Навигация и гидрография, 1999, №7.
6. Патент РФ №2439613. Гидроакустический доплеровский лаг с алгоритмом многоальтернативной фильтрации эхосигнала, основанным на использовании банка фильтров Калмана.
7. Патент РФ №2659710. Способ измерения скорости судна доплеровским лагом.


Способ управления подвесом ротора электростатического гироскопа
Способ изготовления ротора электростатического гироскопа и устройство для осуществления этого способа
Способ взвешивания ротора гироскопа в электростатическом подвесе
Датчик индукционного лага повышенной прочности
Способ определения погрешности двухстепенного гироблока
Волномерный буй с инерциальным измерительным модулем на основе микромеханических датчиков
Интегрированная инерциально-спутниковая система ориентации и навигации
Способ управления подвесом ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Устройство для измерений мгновенных угловых перемещений качающейся платформы
Корабль освещения подводной обстановки
Способ позиционирования подводных объектов
Плоскостное антенно-фидерное устройство
Антенный модуль
Мультистатическая система подводного наблюдения
Приемный гидроакустический блок
Способ позиционирования подводных аппаратов
Способ экономии запаса электроэнергии автономного необитаемого подводного аппарата
Автономный необитаемый подводный аппарат
Способ определения координат морской шумящей цели

