Результат интеллектуальной деятельности: СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ
Вид РИД
Изобретение
Изобретение относится к автомобилестроению, в частности, к способам и устройствам активной безопасности всех типов грузовых и легковых автомобилей, предпочтительно беспилотных грузовых бескабинных транспортных средств с электроприводом (БГТСЭ).
Предпочтительная область использования обусловлена отсутствием водителя в БГТСЭ, ввиду чего требования к предотвращению опрокидывания в реальных условиях эксплуатации существенно возрастают, особенно на виражах и при движении БГТСЭ на мокром дорожном покрытии и наличии гололеда.
Известен способ и система для его реализации, предназначенные для определения опрокидывания транспортного средства и опасных ситуаций, которые могут предшествовать опрокидыванию, в частности, тип опрокидывания, вызванного обвалом грунта, которые включает следующие шаги, которые представляются в виде циклов, определение бокового ускорения транспортного средства, расчет производной ускорения, основанный на боковых ускорениях, полученных, по крайней мере, за 2 шага, определение возможности опрокидывания транспортного средства, основанное на боковом ускорении, полученном, по крайней мере, за один шаг и производная ускорения рассчитанного, по крайней мере, за один шаг, генерация выходного сигнала активации, основанного, по крайней мере, на возможности опрокидывания транспортного средства, определенной на шаге. (см. патент США US 8046135 В2, заявители DELPHI TECH INC, опубл. 25.10.2011).
Основным недостатком способа является неопределенность необходимого тормозного замедления для предотвращения опрокидывания.
Известен способ и устройство для предотвращения бокового опрокидывания моторных транспортных средств, в котором определена поперечная переменная, которая отражает поперечную динамику моторного транспортного средства, данную поперечную переменную сравнивают, по меньшей мере, с одним пороговым значением и, в зависимости от результата сравнения, осуществляют тормозное вмешательство для предотвращения бокового опрокидывания. Установлена переменная наклона, которая отражает боковой наклон кузова транспортного средства и ее пороговым значением является функция переменной наклона, (см. патент США US 9505286 В2, заявители GOETTSCH GERHARD; MERLEIN DOMINIK; BOSCH GMBH ROBERT, опубл. 29.11.2016).
Основным недостатком способа является сложность сенсорной части системы, предполагающей использование значительного числа датчиков, включая датчики скорости вращения колес, поперечного ускорения, скорости рыскания, тормозного давления и угла поворота рулевого колеса.
Известен способ, основанный на кинематике оценки абсолютного угла крена кузова транспортного средства, в котором абсолютный угол крена кузова транспортного средства оценивается путем объединения двух предварительных оценок угла крена, основанных на их частоте, таким образом, что объединенная оценка непрерывно способствует более точным предварительным оценкам угла крена. Первая предварительная оценка угла крена, основана на измеренной скорости крена, улучшенной за счет первоначальной компенсации сигнала скорости крена для ошибки смещения с использованием оценок скорости крена, полученных из других измеренных параметров. Вторая предварительная оценка угла крена определяется на основе кинематической связи между углом крена, боковым ускорением, скоростью рыскания и скоростью транспортного средства. Объединенная оценка угла крена использует коэффициент объединения, который изменяется с частотой сигналов предварительного угла крена, и фактор объединения, используемый в коэффициенте объединения, устанавливается на разные значения в зависимости от того, находится ли транспортное средство в стационарном или переходном состоянии, (см. патент ЕС ЕР 2127988 А1, заявитель DELPHI TECH INC, опубл. 02.12.2009).
Недостатком способа является значительное количество измеряемых параметров и сложная процедура обработки данных для прогнозирования опрокидывания.
Наиболее близким по технической сущности является способ и система предотвращения опрокидывания транспортного средства на неровной полосе движения. Дорожные изображения, снятые устройствами захвата изображений, используются для расчета информации о дороге. Информация о дороге вместе с информацией о динамике транспортного средства, такой как скорость и ускорение транспортного средства, используется для прогнозирования угла опрокидывания и бокового ускорения транспортного средства, движущегося по неровной полосе движения. В способе предотвращения опрокидывания автомобиля регистрируют и обрабатывают сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, и передают их через блок сопряжения в блок обработки информации, в котором определяют значения таких физических переменных, как скорость центра масс и угол поворота управляемых колес и сравнивают их с граничными значениями, характеризующими критическое состояние автомобиля, и формируют, в случае превышения прогнозируемой скорости центра масс величины прогнозируемой скорости опрокидывания, на выходе блока обработки информации управляющие сигналы, передаваемые на устройства управления акселератором и/или тормозной системой и устройство индикации включения торможения, Помимо этого определяют высоту центра масс и критическую скорость опрокидывания транспортного средства, движущегося по неровной полосе движения, которые вырабатываются и используются для определения индекса опрокидывания транспортного средства. Если индекс опрокидывания транспортного средства превышает заданное значение, система предупреждает водителя или напрямую контролирует скорость движения транспортного средства, чтобы автомобиль не перевернулся на неровной полосе движения, (см. патент США US 9116784 В2, заявители AUTOMOTIVE RES & TEST СТ, опубл. 25.08.2015).
Недостатком известного способа являются ограниченные возможности системы, так как основным источником получения информации о параметрах движения автомобиля являются дорожные изображения, но это усложняет обработку изображений дороги в условиях темного времени суток, осадков, тумана и ярких источников света. Сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, являются вспомогательными при определении параметров движения автомобиля и не являются определяющими для указанных параметров, что приводит к высокой сложности вычислений.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в косвенных измерениях, прогнозировании и предотвращении опрокидывания автомобиля.
Поставленная техническая задача решается тем, что в способе предотвращения опрокидывания автомобиля, при котором регистрируют и обрабатывают сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, и передают их через блок сопряжения в блок обработки информации, в котором определяют значения физических переменных, а именно скорости центра масс и угла поворота управляемых колес и сравнивают их с граничными значениями, характеризующими критическое состояние автомобиля, и формируют, в случае превышения прогнозируемой скорости центра масс величины прогнозируемой скорости опрокидывания, на выходе блока обработки информации управляющие сигналы, передаваемые на устройства управления акселератором и/или тормозной системой и устройство индикации включения торможения, причем в блоке обработки информации в реальном времени формируют методом экстраполяции по времени прогнозируемые значения скорости центра масс, угла поворота управляемых колес автомобиля и граничного значения скорости опрокидывания автомобиля, путем математической обработки сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с программным обеспечением, и формируют, в случае превышения величины прогнозируемой скорости центра масс автомобиля в сравнении с величиной прогнозируемой скорости опрокидывания, управляющие воздействия на устройства управления акселератором и/или тормозной системой для автоматического предотвращения опрокидывания автомобиля и на устройство индикации включения торможения, предназначенное для передачи водителю информации о включении автоматического режима предотвращения опрокидывания автомобиля. Водитель в беспилотных грузовых бескабинных транспортных средствах с электроприводом отсутствует, а информация о предаварийном режиме БГТСЭ должна быть доведена до сведения оператора, следящего за процессом движения на дороге для принятия мер по предотвращению возникновения возможности аварийных ситуаций в других транспортных средствах.
Технический результат состоит в динамической стабилизации безопасной скорости автомобиля на виражах, за счет чего предотвращается опрокидывание автомобиля.
Заявленное изобретение поясняется рисунками, где:
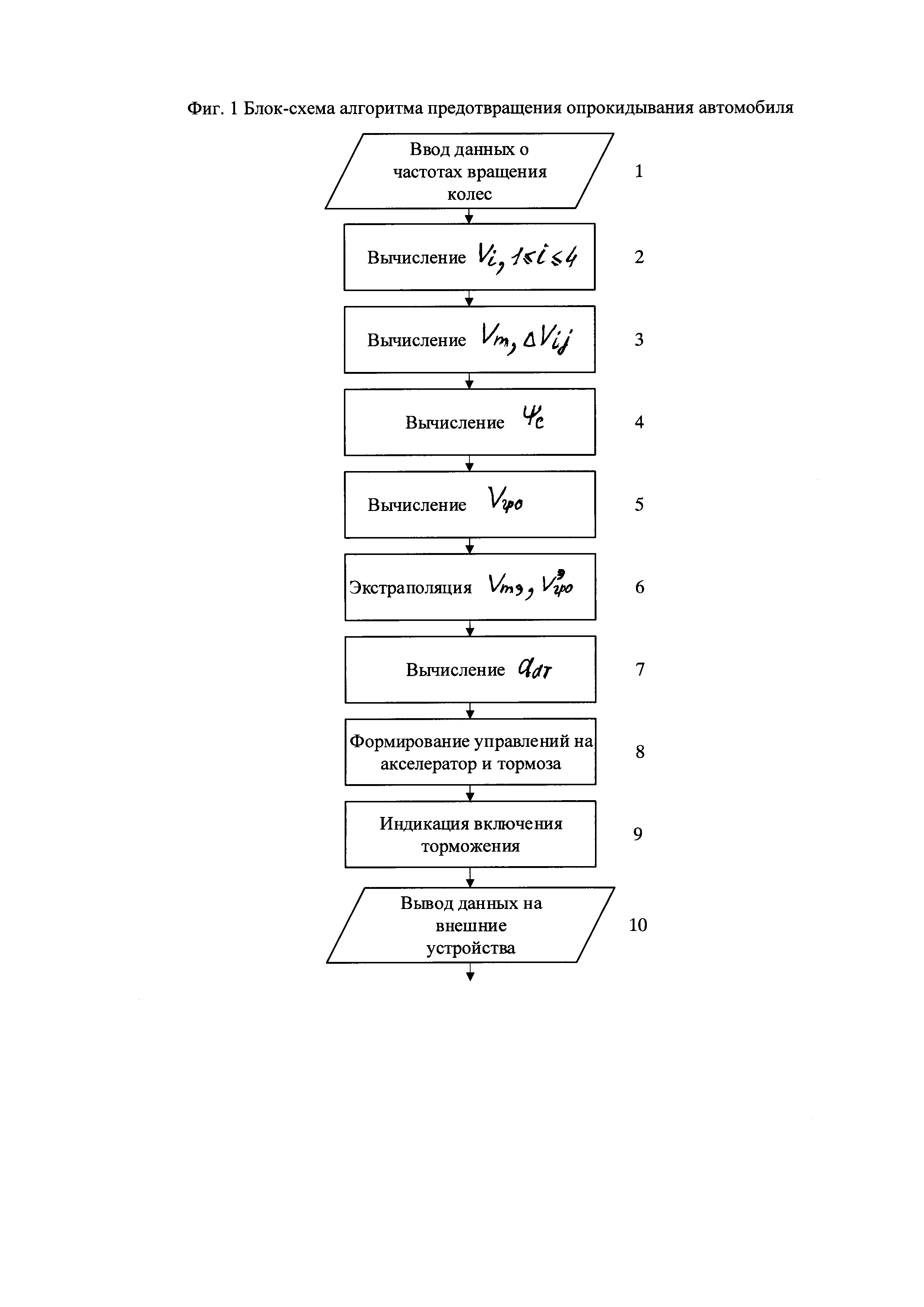
на фиг. 1 представлена блок-схема алгоритма предотвращения опрокидывания автомобиля;
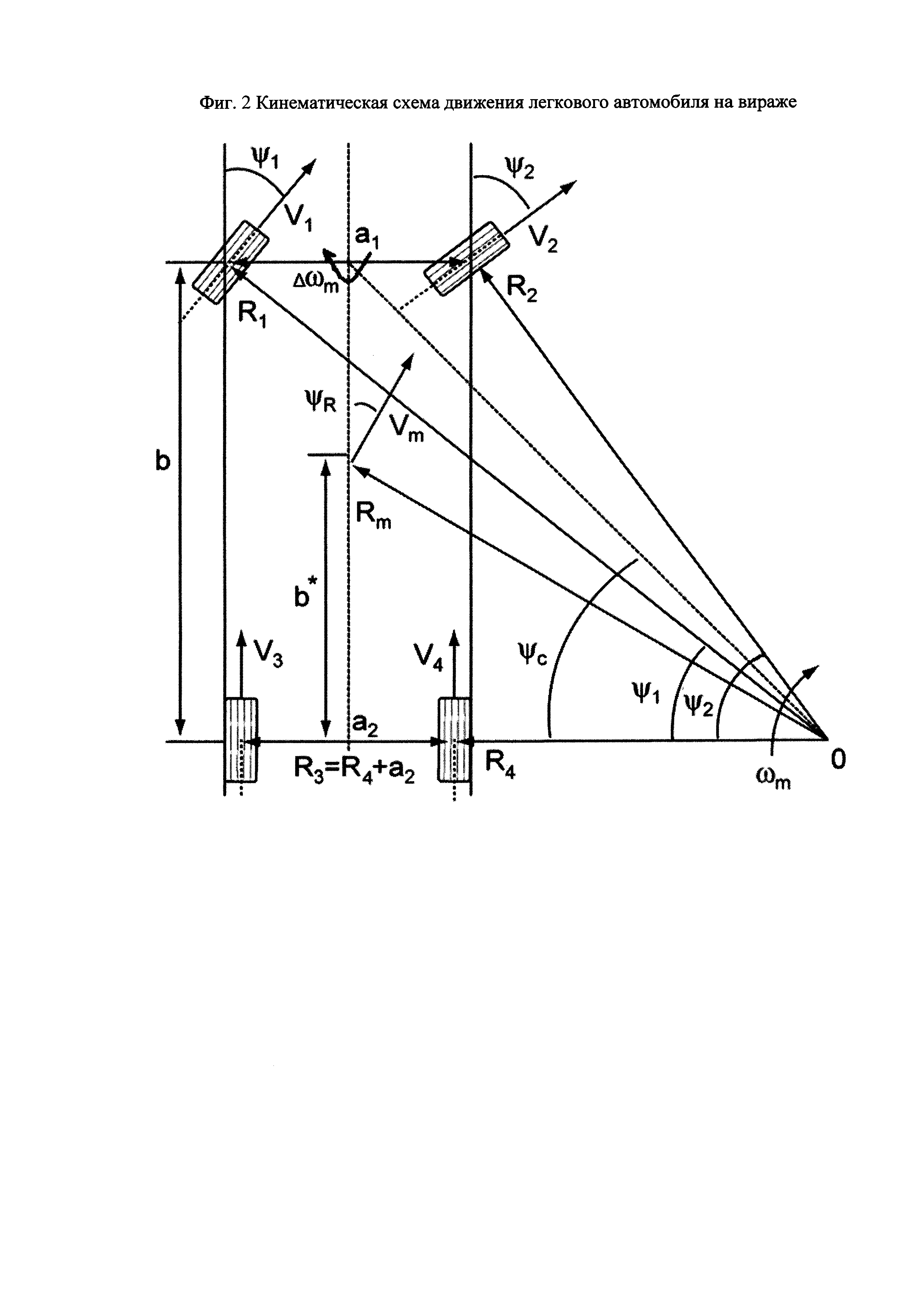
на фиг. 2 представлена кинематическая схема движения легкового автомобиля на вираже.
Фиг. 1 содержит вычислительные блоки алгоритма предотвращения опрокидывания автомобиля, реализующие следующие действия способа:
1 - ввод данных о частотах вращения колес;
2 - вычисление продольных скоростей вращения колес;
3 - вычисление продольной скорости центра масс и разности скоростей вращения пар колес;
4 - вычисление угла поворота управляемых колес;
5 - вычисление граничной скорости опрокидывания автомобиля;
6 - экстраполяция по времени скорости центра масс и граничной скорости опрокидывания;
7 - вычисление тягово-тормозного ускорения;
8 - формирование управляющих воздействий на акселератор и тормозную систему;
9 - индикация включения торможения;
10 - вывод данных на внешние устройства.
Для реализации способа согласно предложенному изобретению может быть использована система предотвращения опрокидывания автомобиля, которая включает датчики частот вращения колес автомобиля, связанные с блоком сопряжения линиями связи, блок обработки информации, выполненный с возможностью получения от датчиков частот вращения колес автомобиля посредством линий связи и блока сопряжения соответствующих сигналов и формирования на их основании и на основании настроечных параметров оценки физических параметров, характеризующих состояние автомобиля, управляющих воздействий на устройства управления акселератором и/или тормозной системой и устройство индикации включения торможения, блок ввода и отображения информации, включающий устройство ввода для ввода настроечной информации и выбора режима отображения информации, устройства управления акселератором и/или тормозной системой, устройство индикации включения торможения, вторичный источник питания, который осуществляет стабилизацию и преобразование напряжения, получаемого от бортовой сети автомобиля, в величины напряжения, необходимые для питания микроконтроллера, средства визуального отображения информации.
Способ осуществляется следующим образом.
Сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, регистрируют, обрабатывают и передают их через блок сопряжения в блок обработки информации. В блоке обработки информации определяют значения таких физических переменных, как скорость центра масс и угол поворота управляемых колес, и сравнивают их с граничными значениями, характеризующими критическое состояние автомобиля. А именно, в блоке обработки информации в реальном времени формируют методом экстраполяции по времени прогнозируемые значения скорости центра масс, угла поворота управляемых колес и граничного значения скорости опрокидывания автомобиля, путем математической обработки сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с программным обеспечением, и формируют, в случае превышения величины прогнозируемой скорости центра масс автомобиля в сравнении с величиной прогнозируемой скорости опрокидывания, управляющие воздействия на устройства управления акселератором и/или тормозной системой для автоматического предотвращения опрокидывания автомобиля и на устройство индикации включения торможения для передачи водителю информации о включении автоматического режима предотвращения опрокидывания автомобиля.
В качестве математической модели косвенных измерений скорости центра масс автомобиля, Vm и угла поворота управляемых колес Ψс, используется система уравнений линейных скоростей вращения колес Vi, 1≤i≤4 на вираже:

ΔVSi, 1≤i≤4 - скорости продольных скольжений колес;
Δωm - угловая скорость сноса или заноса колес автомобиля.
На фиг. 2 приняты следующие обозначения:
b - колесная база автомобиля;
Ψ1 и Ψ2 - углы поворота соответственно 1-го и 2-го управляемых колес;
Ψс - средний угол поворота управляемых колес;
a 1 и а2 - размеры колеи передних и задних колес;
Vi - линейная скорость вращения i-го колеса (1≤i≤4);
Ri - радиусы поворота соответствующих колес;
Rm и Vm - соответственно радиус поворота и линейная скорость продольного движения центра масс;
ΨR - угол рысканья;
b* - расстояние от центра масс до задней оси автомобиля;
ωm - угловая скорость вращения центра масс автомобиля на вираже при движении без сноса или заноса колес.
Оценки  формируются по данным измерений частот вращения колес ωi(k) и настроечных данных свободных радиусов Rci(k) колес.
формируются по данным измерений частот вращения колес ωi(k) и настроечных данных свободных радиусов Rci(k) колес.
Решение некорректной задачи определения оценок  (1≤i≤4) по известным оценкам
(1≤i≤4) по известным оценкам  настроечным параметрам b, a1≈а, а2≈а при Δωm=0 приведено в алгоритме определенных параметров движения автомобиля (Свидетельство об государственной регистрации программы для ЭВМ №2009616286. ИНКА-СПОРТ Версия 2.0 / Бузников С.Е., Елкин Д.С. // Роспатент, 2009).
настроечным параметрам b, a1≈а, а2≈а при Δωm=0 приведено в алгоритме определенных параметров движения автомобиля (Свидетельство об государственной регистрации программы для ЭВМ №2009616286. ИНКА-СПОРТ Версия 2.0 / Бузников С.Е., Елкин Д.С. // Роспатент, 2009).
Так, в частности, оценка продольной скорости центра масс  определяется в виде:
определяется в виде:

где |ΔVSi(k)+ΔVSj(k)|=min[|ΔVS1(k)+ΔVS2(k)|,|ΔVS3(k)+ΔVS4(k)|,|ΔVS1(k)+ΔVS4(k)|,|ΔVS2(k)+ΔVS3(k)|].
Для пары колес разных бортов разность ΔVi,j=Vi-Vj равна:

Решение (3) в случае  и ΔVSi=ΔVSj=0:
и ΔVSi=ΔVSj=0:

Принимая оценку  получим, что:
получим, что:


Рассматривается случай опрокидывания автомобиля на гладкой горизонтальной поверхности при условии, что граничная скорость опрокидывания меньше граничных скоростей сноса и заноса колес и, следовательно, Δωm=0.
Граничная скорость опрокидывания Vгр0 определяется из условий равенства опрокидывающего и возвращающего моментов, и составляет:

hm - высота центра масс автомобиля.
Прогнозирование возникновения опрокидывания автомобиля выполняется путем экстраполяции граничной прогнозируемой скорости опрокидывания Vгр0 и прогнозируемой скорости центра масс Vm по времени τэ и проверки выполнения неравенства:




В случае, если неравенство (8) выполняется, активируют устройства управления акселератором и/или тормозной системой и устройство вывода графической информации.
Величина времени экстраполяции τэ включает время прогнозирования наступления события опрокидывания и время запаздывания, вносимое из-за конечного быстродействия вычислительного устройства и запаздываний устройств управления акселератором и/или тормозной системой.
Величина тягово-тормозного ускорения adT, достаточного для предотвращения сноса или заноса колес автомобиля определяется из решения уравнения продольного движения центра масс автомобиля:

kx - коэффициент лобового аэродинамического сопротивления;
kтр - коэффициент трения качения колес;
αT - угол тангажа автомобиля.
При  из (9) получим величину αdT:
из (9) получим величину αdT:

В случае движения по горизонтальной поверхности αT=0, и пренебрегая силами аэродинамического сопротивления и трения качения, получим приближенно:

Распределение тягового-тормозного замедления между двигателем, трансмиссией и тормозной системой выполняется в соответствии с характеристиками этих систем.
Описанная последовательность действий способа и используемое для его реализации минимальное число технических средств позволяет достичь следующих технических преимуществ над известными способами:
- возможность прогнозирования и предотвращения опрокидывания автомобиля до возникновения этого события;
- низкая стоимость технических средств, обусловленная наличием только штатных физических датчиков первичной информации, необходимых и достаточных для решения задачи;
- возможность функционирования в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков разных бортов автомобиля;
- пониженное энергопотребление, обусловленное использованием только штатных датчиков для получения информации;
- более высокая эксплуатационная надежность, обусловленная минимальной конфигурацией используемых технических средств, включая штатные датчики первичной информации;
- отсутствие влияния состояния внешней среды, включая освещенность, осадки, туман и прочее, на эффективность функционирования системы;
- возможность использования способа для автоматического предотвращения опрокидываний транспортных средств, включая беспилотные грузовые бескабинные транспортные средства.
Способ предотвращения опрокидывания автомобиля, при котором регистрируют и обрабатывают сигналы, формируемые импульсными датчиками частот вращения колес автомобиля, и передают их через блок сопряжения в блок обработки информации, в котором определяют значения физических переменных, а именно скорости центра масс и угла поворота управляемых колес, и сравнивают их с граничными значениями, характеризующими критическое состояние автомобиля, и формируют, в случае превышения прогнозируемой скорости центра масс величины прогнозируемой скорости опрокидывания, на выходе блока обработки информации управляющие сигналы, передаваемые на устройства управления акселератором и/или тормозной системой и устройство индикации включения торможения, отличающийся тем, что в блоке обработки информации в реальном времени формируют методом экстраполяции по времени прогнозируемые значения скорости центра масс, угла поворота управляемых колес автомобиля и граничного значения скорости опрокидывания автомобиля, путем математической обработки сигналов о частотах вращения колес и настроечных параметров с помощью микроконтроллера с программным обеспечением, и формируют, в случае превышения величины прогнозируемой скорости центра масс автомобиля в сравнении с величиной прогнозируемой скорости опрокидывания, управляющие воздействия на устройства управления акселератором и/или тормозной системой автоматического предотвращения опрокидывания автомобиля и на устройство индикации включения торможения и передачи оператору информации о включении автоматического режима предотвращения опрокидывания автомобиля.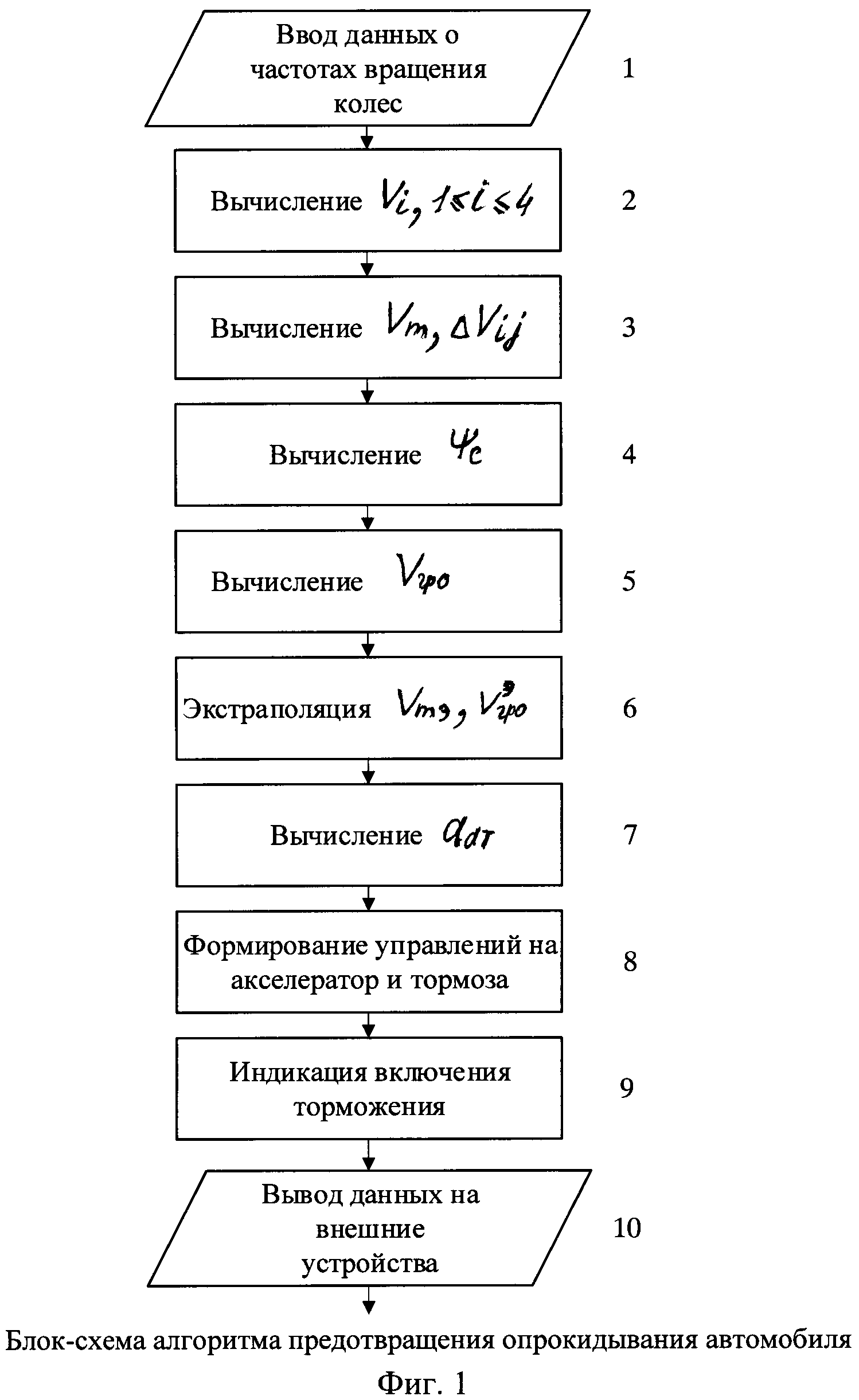
Сцепляющий узел трансмиссии транспортного средства
Двухкамерный топливный бак
Способ трассировки маршрута движения автоматического транспортного средства
Узел сцеплений трансмиссии транспортного средства
Способ управления автоматическим транспортным средством
Двойное многодисковое сцепление трансмиссии транспортного средства
Семиступенчатая коробка передач транспортного средства
Двойное сцепление
Устройство электрогидравлического управления двойным сцеплением и коробкой передач
Двойное сцепление трансмиссии транспортного средства
Межосевой дифференциал полноприводного автомобиля
Раздаточная коробка
Раздаточная коробка полноприводного автомобиля
Полноприводный грузовой автомобиль
Грузовой автомобиль со всеми ведущими колесами
Способ предотвращения аварийного перегрева шин и тормозов автомобиля и система для его осуществления
Способ управления комбинированной силовой установкой гибридного транспортного средства
Шестиколесный автомобиль с комбинированным приводом
Способ распределения крутящих моментов, подводимых к колесам полноприводных автомобилей
Способ трассировки маршрута движения автоматического транспортного средства

